Optimal Collision-Free Grip Planning for Biped Climbing Robots in Complex Truss Environment




Abstract
:1. Introduction
- (1)
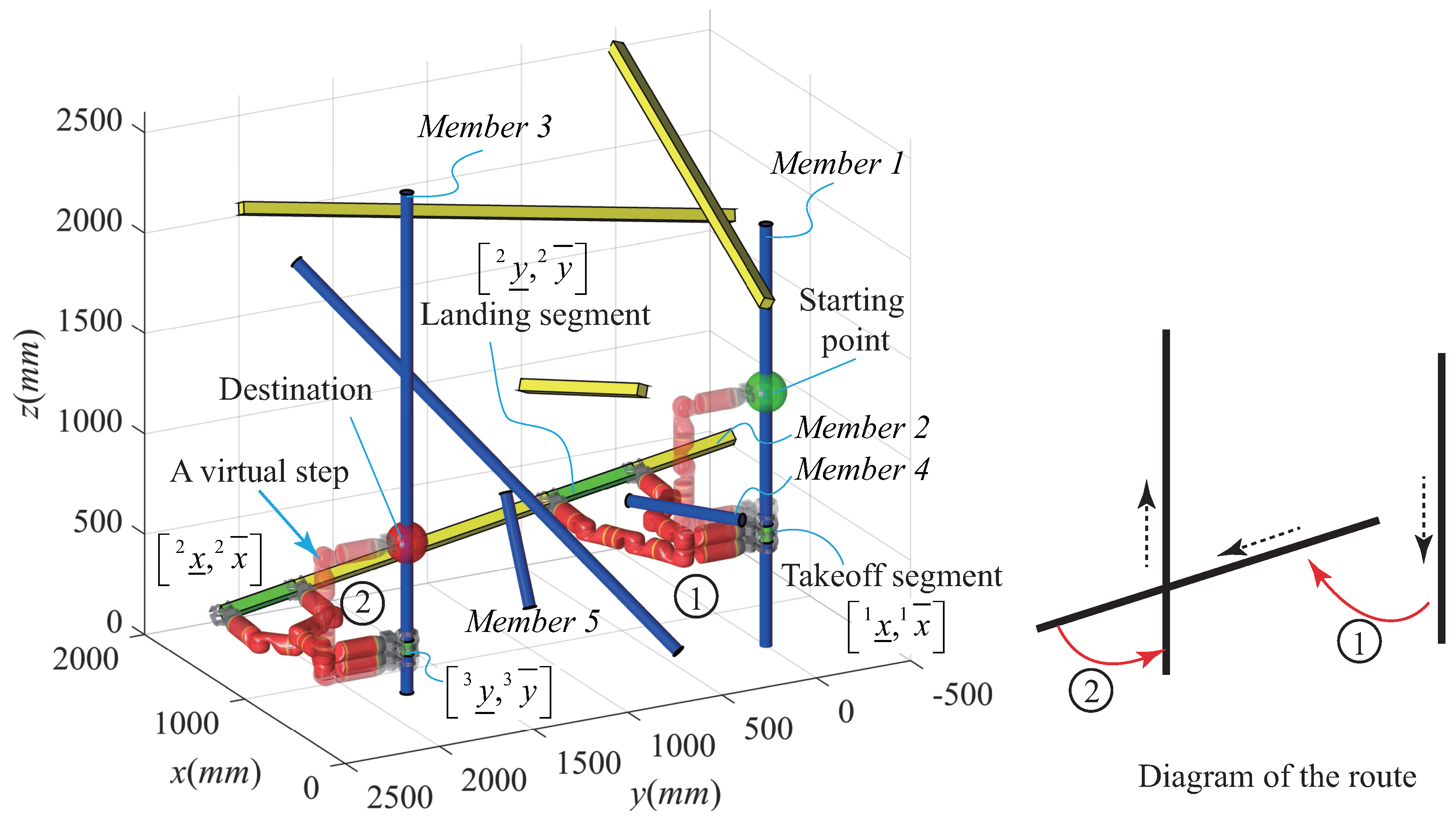
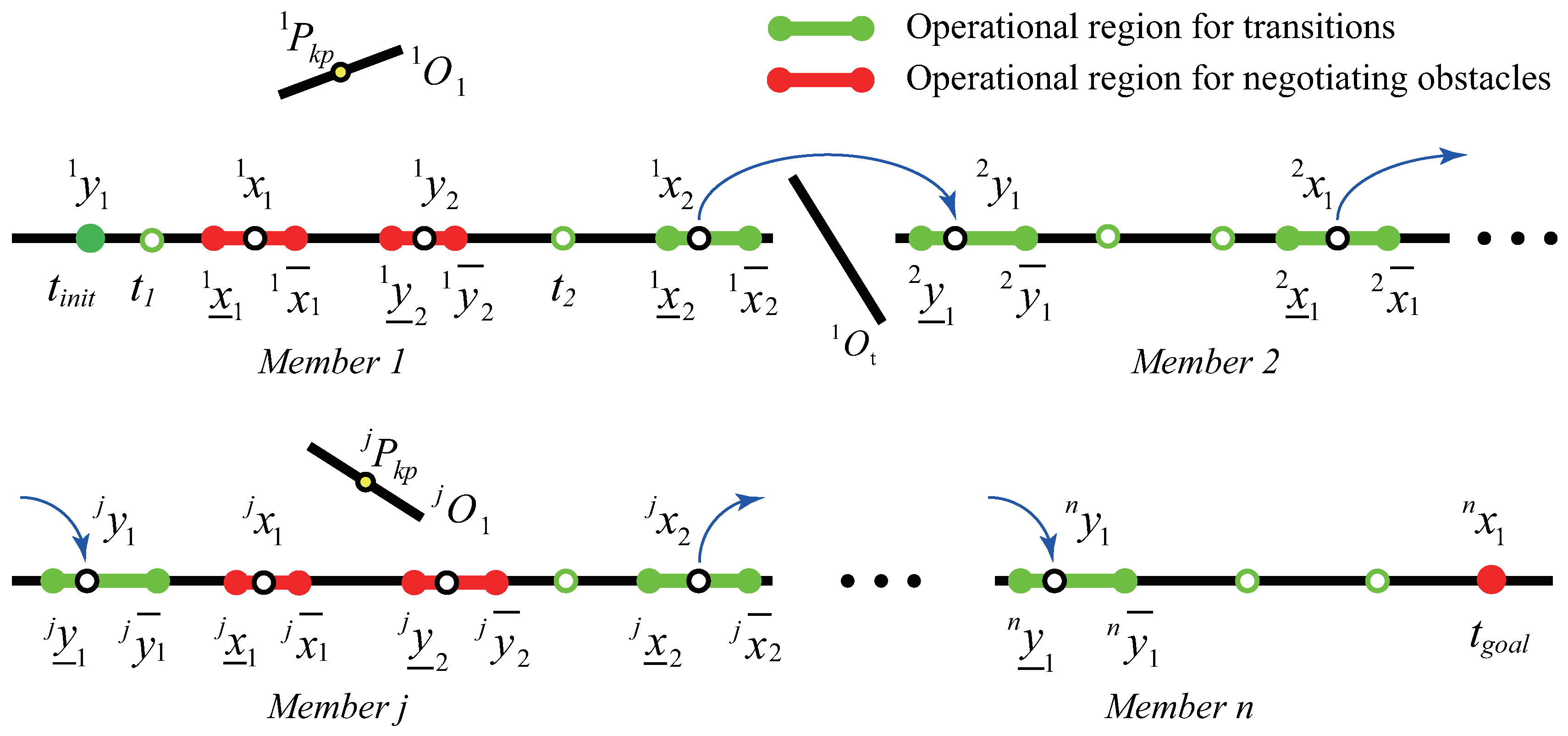
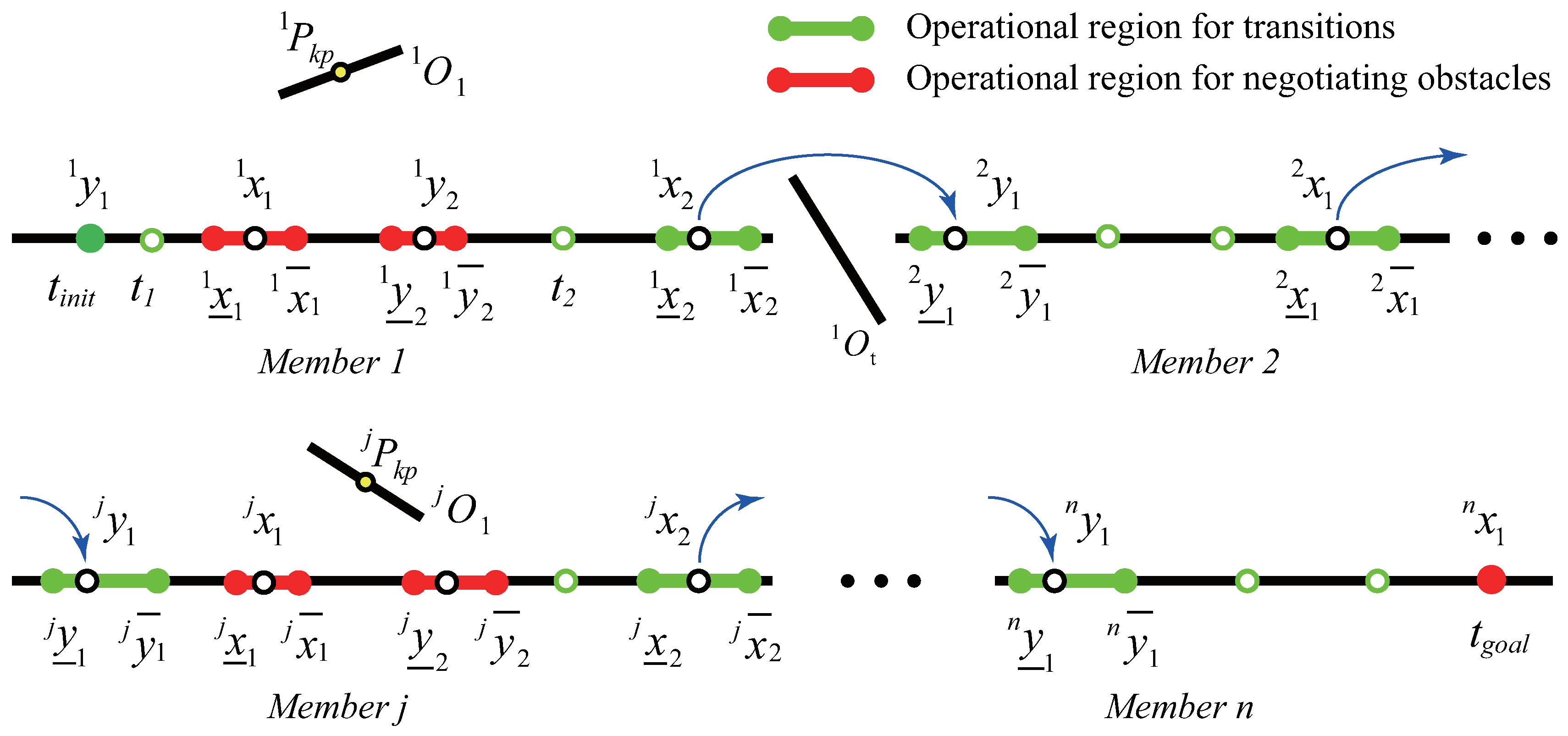
- quick determination of all feasible climbing routes in global, outputting member sequence and corresponding grip orientation and operational regions for transition;
- (2)
- optimal arrangement of collision-free grips on the operational regions on each member along each feasible climbing route;
- (3)
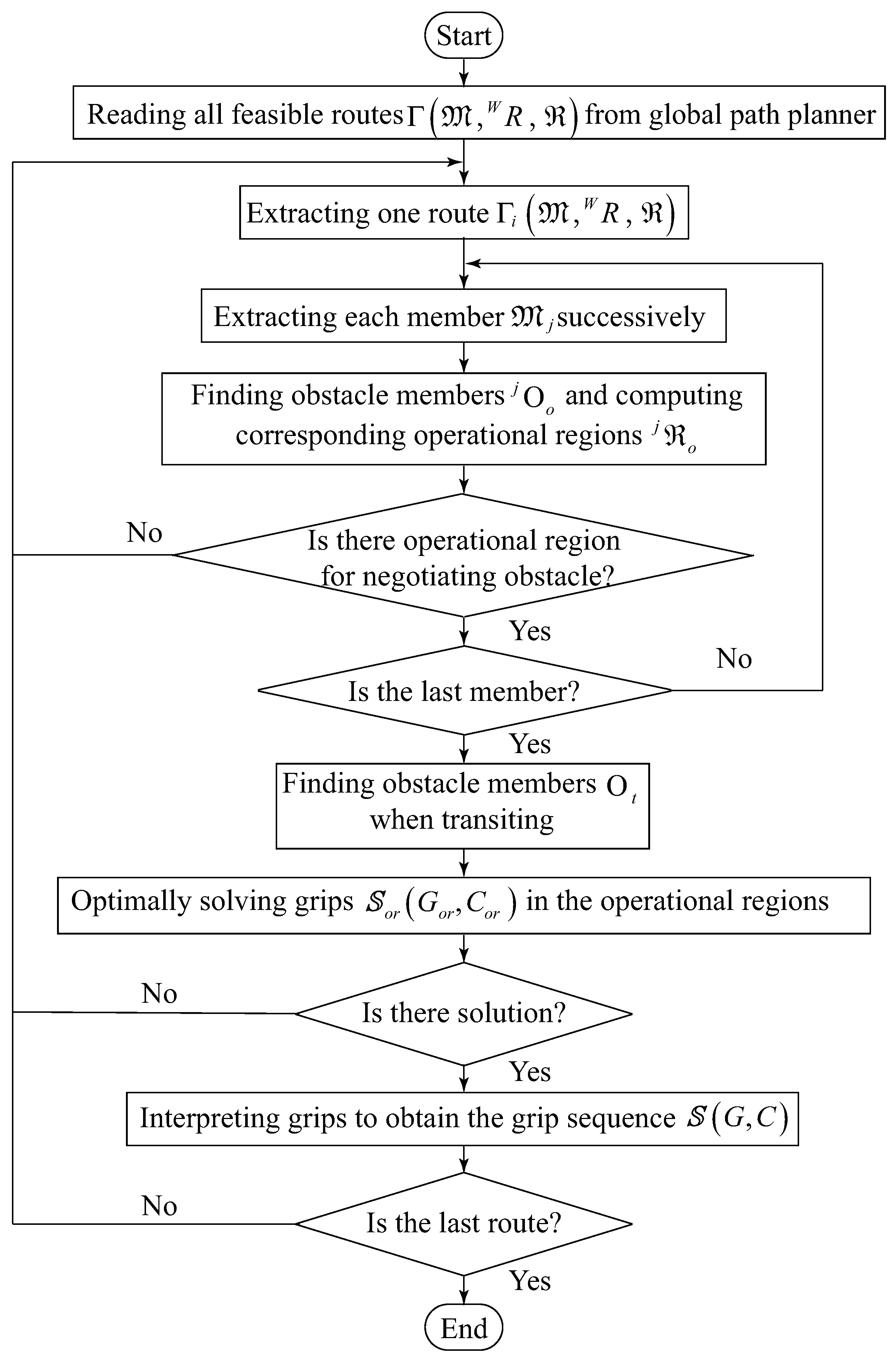
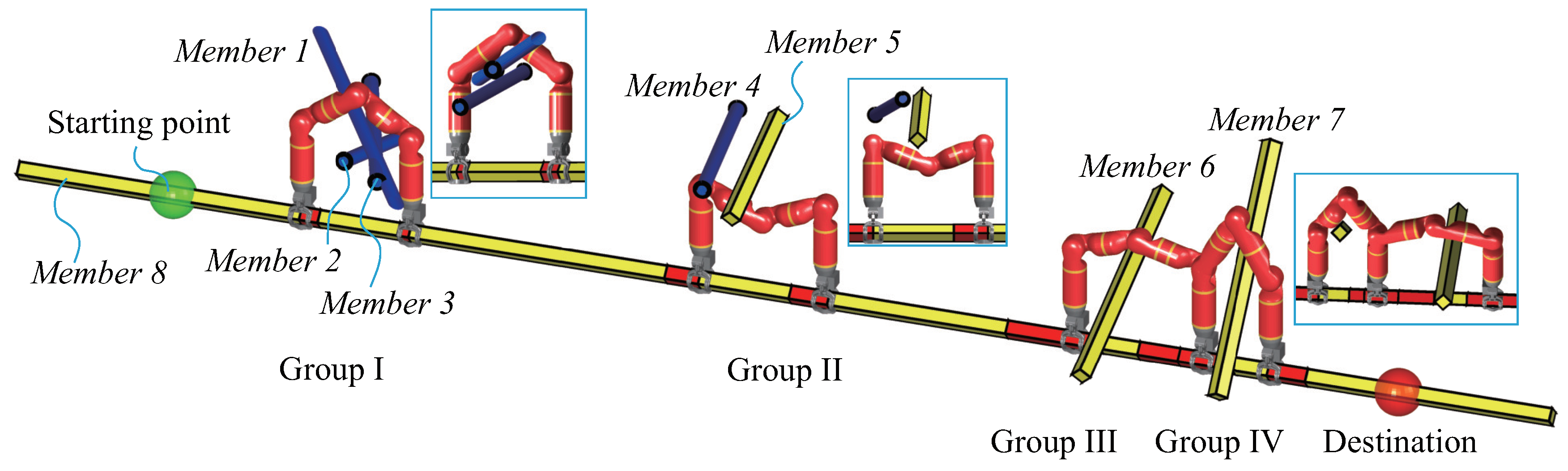
- generation of the entire grip sequence with a gait interpreter.
2. Problem Statement
2.1. Global Path Planning and Feasible Routes
2.2. The Problem of Optimal Collision-Free Grip Planning
3. Computation of Operational Regions for Negotiating Obstacles
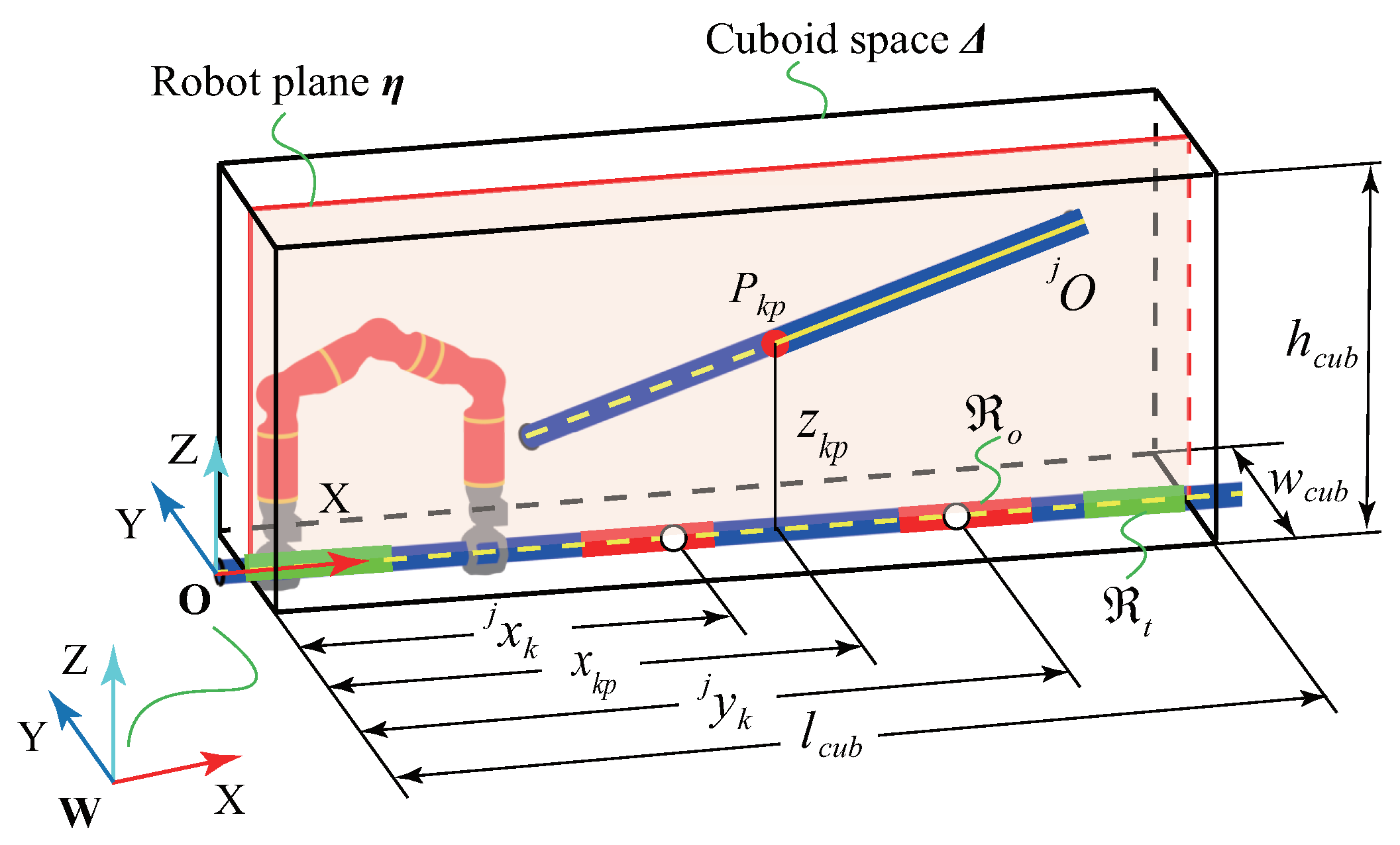
3.1. The Key Point for Negotiating Obstacles
- the intersection point between the obstacle member axis and , if this intersection point locates within the cuboid, or
- the intersection point between the obstacle member axis and the cuboid, if the intersection point between the obstacle member axis and is outside the cuboid. The , in this case, is closest to .
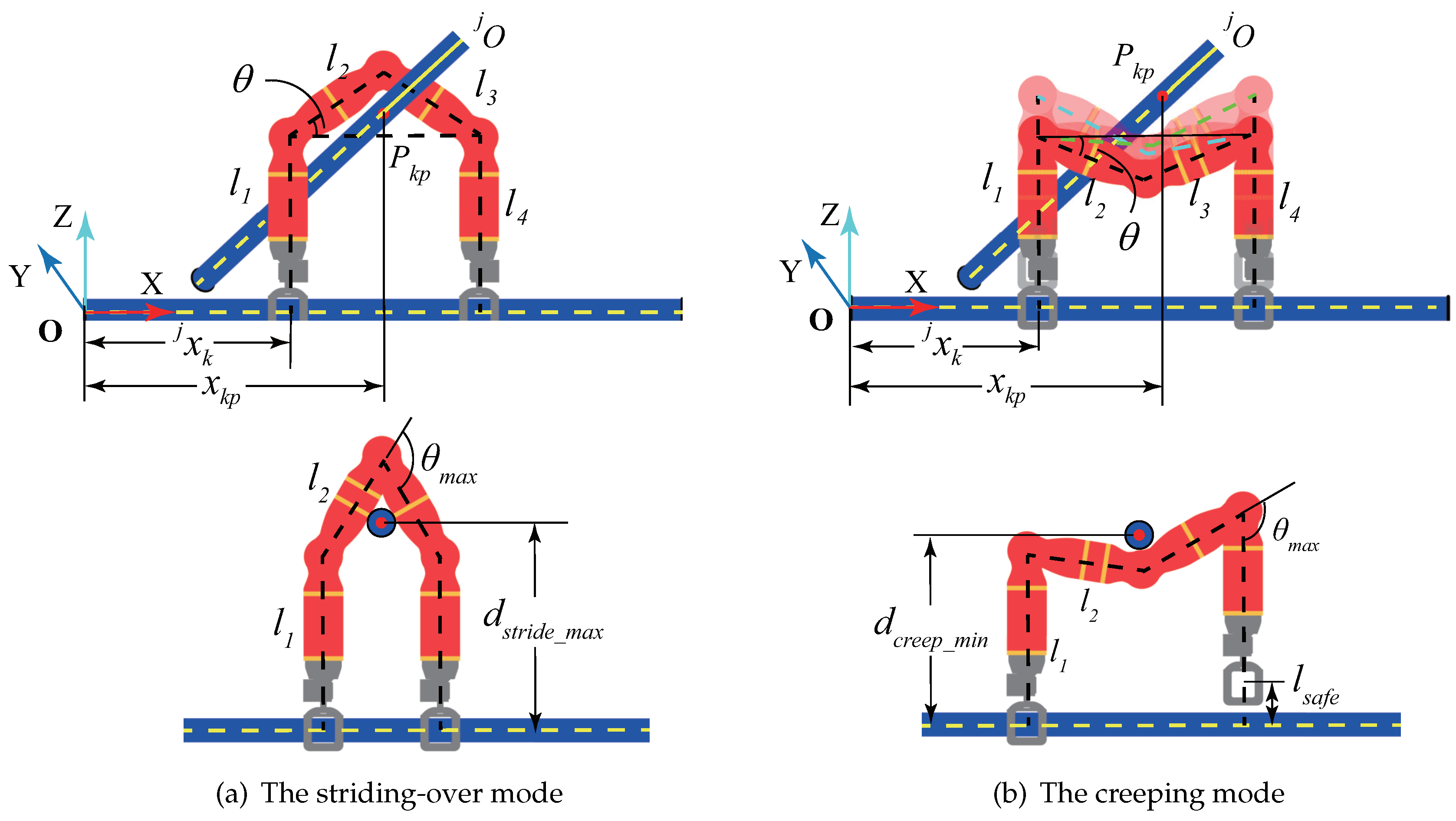
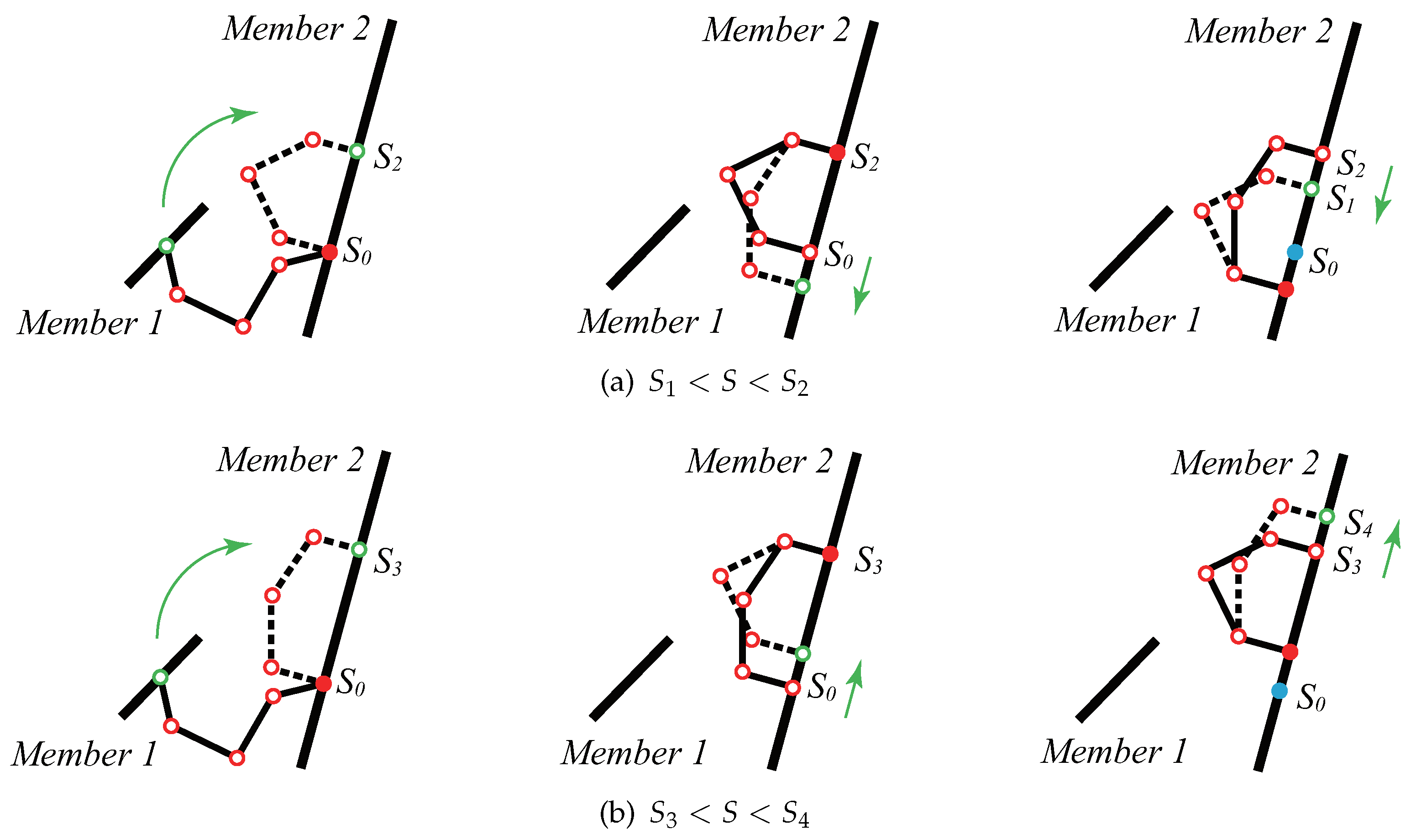
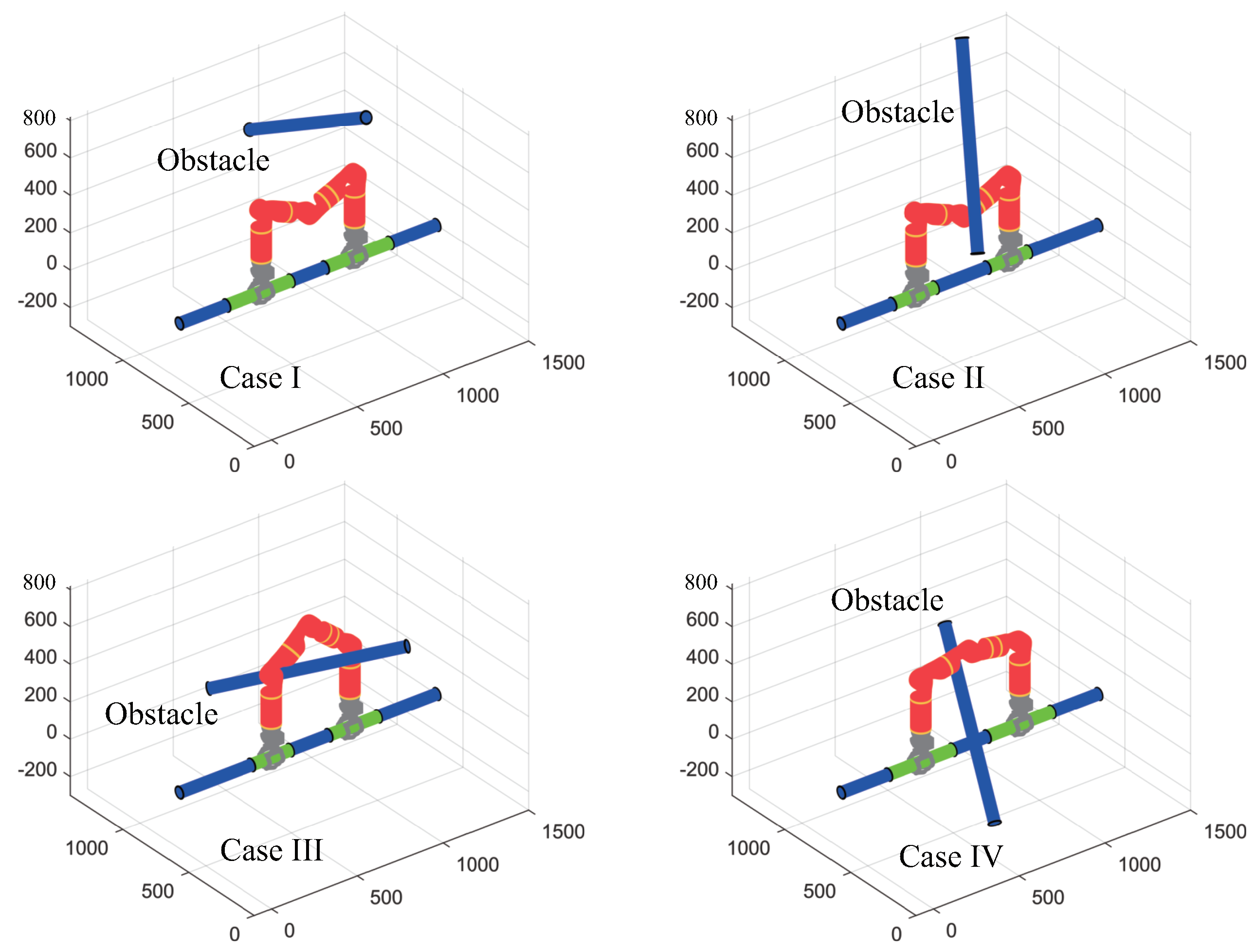
3.2. The Mode to Negotiate Obstacles
3.3. The Mathematical Model of Operational Regions for Negotiating Obstacles
4. Optimal Collision-Free Grip Planning
4.1. Objective: Minimum Climbing Steps and Good Manipulability
4.1.1. Minimum Climbing Steps
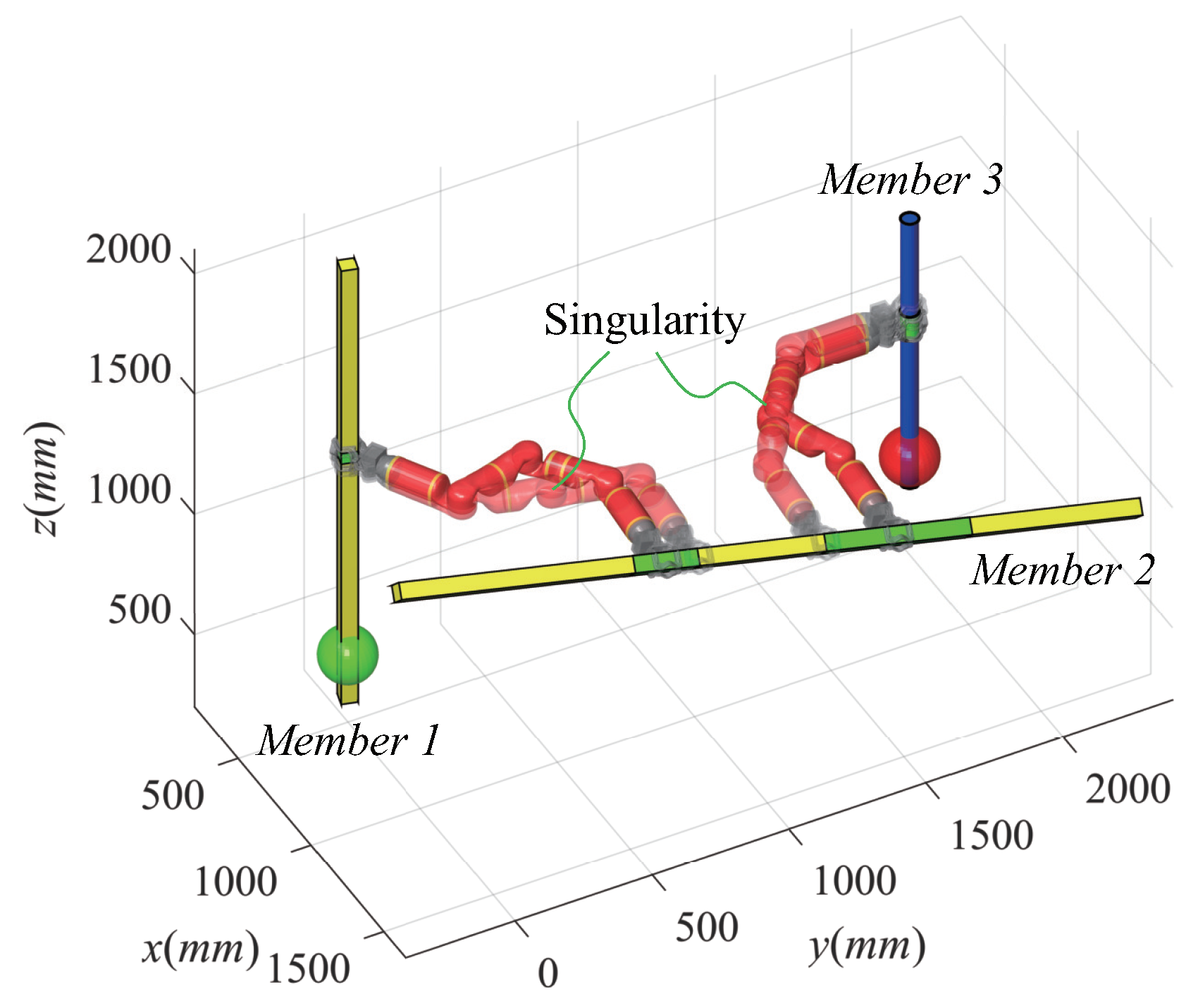
4.1.2. Good Manipulability
4.1.3. Combination
4.2. Constraints
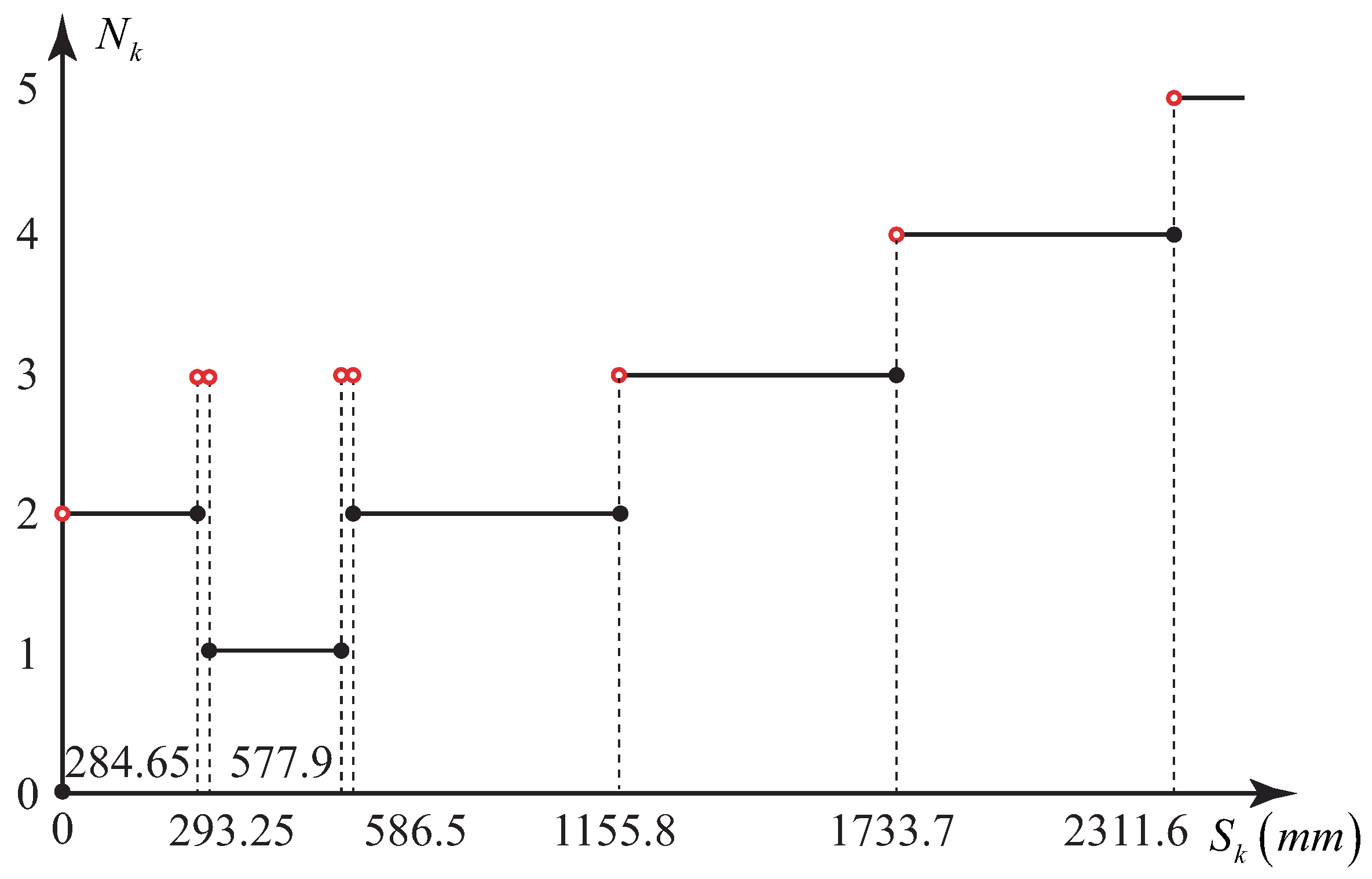
4.2.1. Moving Distance and the Gaits
- DiMov (direct movement) gait: the moving distance is equal to . In this case, the landing segment partially (or completely) overlaps with the takeoff segment. Climbot can pass through just with one grip performing two climbing cycles continuously. As a result, the required number of climbing steps in this case is 0.
- Inch gait: the moving distance is within . Only the inchworm-like gait is applied to this condition. At least two steps (stretching and shrinking) are required when climbing with the Inch gait.
- SaFo gait: the moving distance is within . One step climbing with the swinging-around gait or flipping-over gait meets the distance well.
- Hyb gait: the moving distance is within or . Under such circumstances, a mixture of the inchworm-like gait and swinging-around or flipping-over gait should be applied (hybrid gait). Figure 7 illustrates the climbing patterns with Climbot. It moves a step with the swinging-around gait or the flipping-over gait, and then climbs two steps with the inchworm-like gait. Thus, at least three steps are required.
- SaFo gait: the moving distance is larger than . The minimum number of climbing steps can be calculated as , where the symbol represents the ceiling operation. Accordingly, the robot moves with the swinging-around gait or the flipping-over gait.
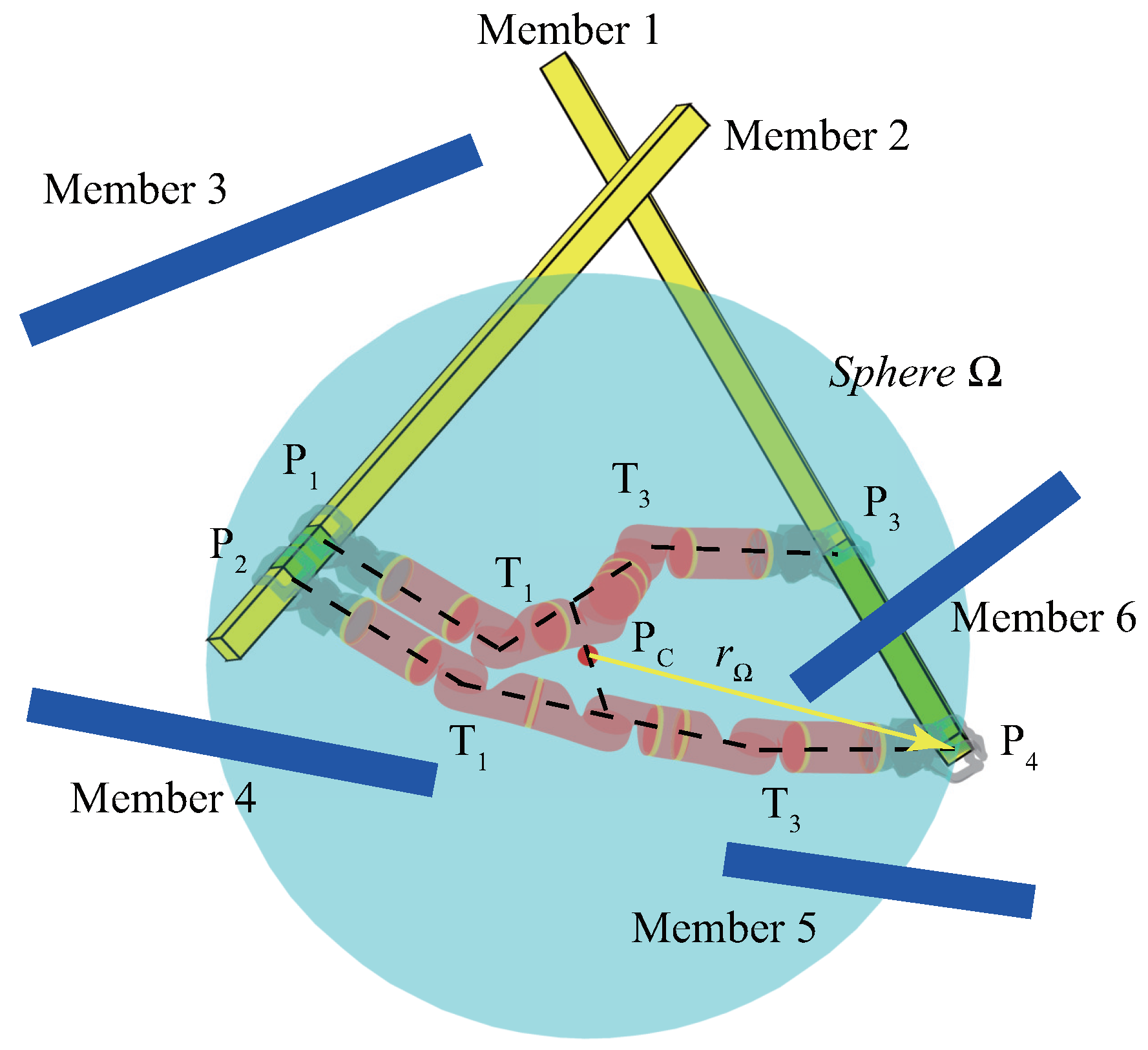
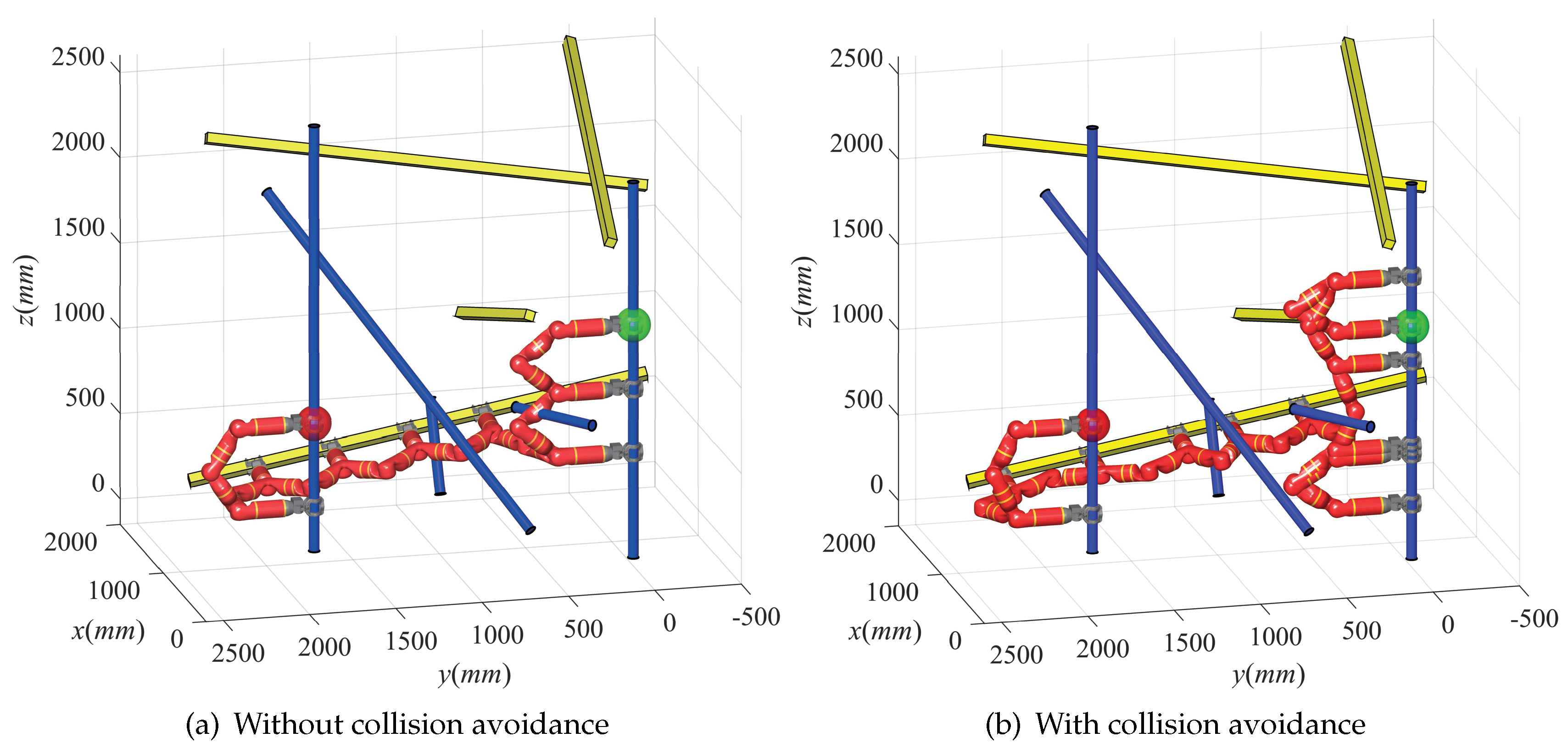
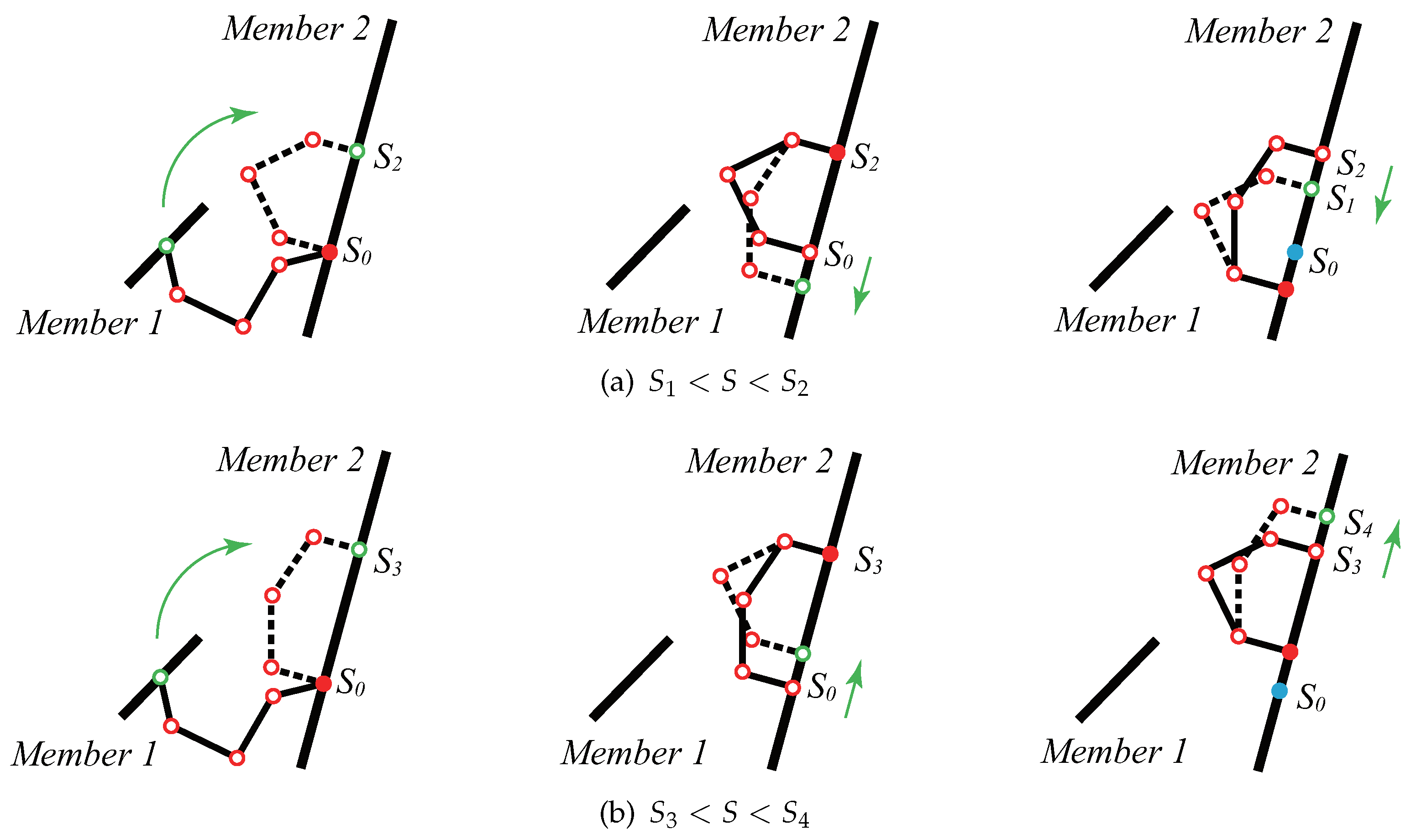
4.2.2. Collision Avoidance during Transitions
4.3. The Optimization Model
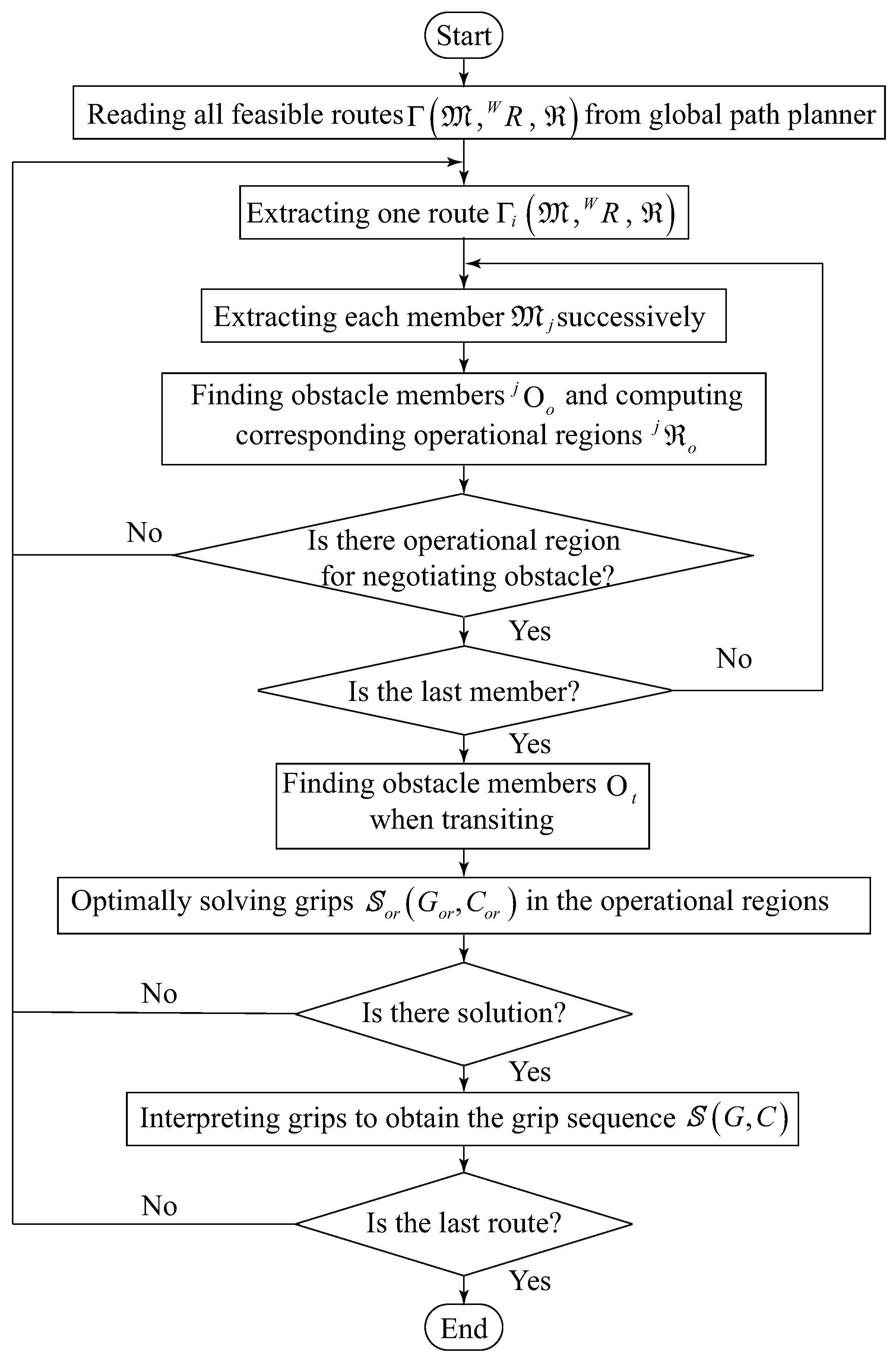
5. Gait Interpreter
| Algorithm 1: The gait interpreter |
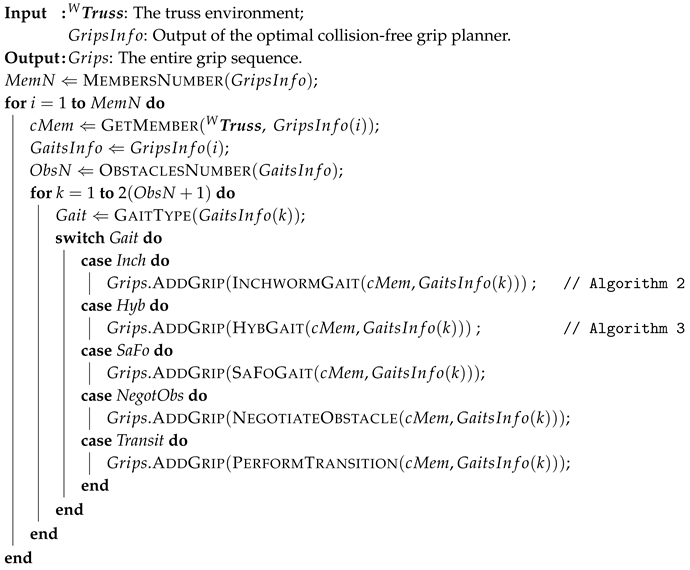 |
| Algorithm 2: InchwormGait: generating grips for the inchworm-like gait |
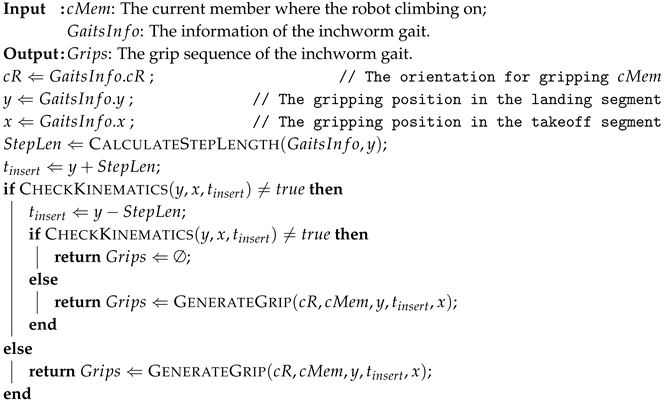 |
| Algorithm 3:HybGait: generating grips for the hybrid gait |
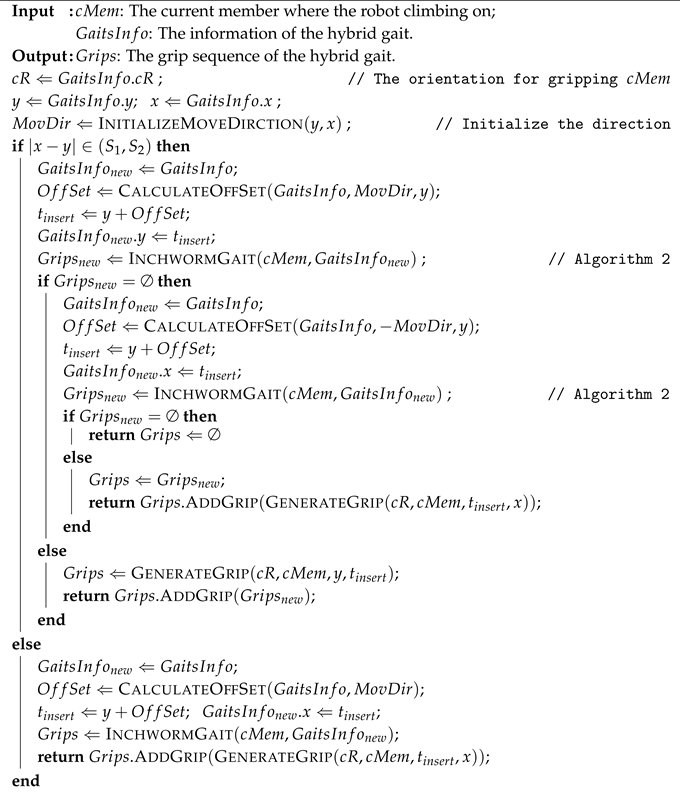 |
6. Simulation
6.1. The Result of Operational Region of Negotiating Obstacle
6.2. The Result of Good Manipulability
6.3. The Results of Collision-Free Grip Planning
7. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| set of all feasible routes | |
| i-th feasible route, | |
| member sequence along the route | |
| j-th member | |
| operational region , each inclusive of the takeoff segement and | |
| the landing segement | |
| operational region for transiting between adjacent members | |
| operational region for negotiating obstacle members | |
| operational region representing starting point and destination | |
| set of gripping orientations corresponding to member sequence | |
| gripping orientation on the j-th member | |
| reference point, direction unit vector, length and radius of the j-th member | |
| t | a scale to specify the gripping position on the j-th member |
| truss environment | |
| k-th gripping position in the takeoff segment on the j-th member | |
| k-th gripping position in the landing segment on the j-th member | |
| obstacles when moving on the j-th member | |
| grips in the operational regions | |
| a grip in the operational region, inclusive of gripping position and orientation | |
| a configuration corresponding to | |
| entire grip sequence | |
| key point for negotiating an obstacle member, | |
| robot plane | |
| the cuboid space where collision may happen, for moving on a member | |
| the sphere space where collision may happen, for transiting | |
| length, width and height of the cuboid space | |
| a pre-defined safe distance to facilitate the gripping and grip-releasing operations | |
| minimum number of climbing steps when passing the j-th member | |
| minimum number of climbing steps from the k-th landing segment to the (k + 1)-th | |
| takeoff segment | |
| minimum and maximum step lengths of the inchworm-like gait | |
| minimum and maximum step lengths of the flipping-over gait and | |
| swinging-around gait | |
| maximum step length of the hybrid gait | |
| robot |
References
- Xu, Y.; Brown, B.; Aoki, S.; Kanade, T. Mobility and Manipulation of a Light-weight Space Robot. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Munich, Germany, 12–16 September 1994; pp. 11–19. [Google Scholar]
- Balaguer, C.; Gimenez, A.; Pastor, J.M.; Padron, V.M.; Abderrahim, M. A Climbing Autonomous Robot for Inspection Applications in 3D Complex Environments. Robotica 2000, 18, 287–297. [Google Scholar] [CrossRef]
- Detweiler, C.; Vona, M.; Yoon, Y.; Yun, S.K.; Rus, D. Self-assembling Mobile Linkages. IEEE Robot. Autom. Mag. 2007, 14, 45–55. [Google Scholar] [CrossRef]
- Tavakoli, M.; Marjovi, A.; Marques, L.; Almeida, A.T.D. 3DCLIMBER: A Climbing Robot for Inspection of 3D Human Made Structures. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 4130–4135. [Google Scholar]
- Tavakoli, M.; Marques, L. 3DCLIMBER: Climbing and Manipulation over 3D Structures. Mechatronics 2011, 21, 48–62. [Google Scholar] [CrossRef]
- Tavakoli, M.; Zakerzadeh, M.R.; Vossoughi, G.; Bagheri, S. A Hybrid Pole Climbing and Manipulating Robot with Minimum DOFs for Construction and Service Applications. Ind. Robot. Int. J. 2005, 32, 171–178. [Google Scholar] [CrossRef]
- Lam, T.L.; Xu, Y. A Flexible Tree Climbing Robot: Treebot—Design and Implementation. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 5849–5854. [Google Scholar]
- Guan, Y.; Jiang, L.; Zhang, X.; Zhang, H. Climbing Gaits of a Modular Biped Climbing Robot. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Singapore, 14–17 July 2009; pp. 532–537. [Google Scholar]
- Guan, Y.; Jiang, L.; Zhu, H.; Wu, W.; Zhou, X.; Zhang, H.; Zhang, X. Climbot: A Bio-inspired Modular Biped Climbing Robot—System Development, Climbing Gaits, and Experiments. J. Mech. Robot. 2016, 8, 021026. [Google Scholar] [CrossRef]
- Chen, S.; Zhu, H.; Guan, Y.; Wu, P. Collision-free Single-step Motion Planning of Biped Pole-climbing Robots in Spatial Trusses. In Proceedings of the IEEE International Conference on Robotics and Biomimetics, Shenzhen, China, 12–14 December 2013; pp. 280–285. [Google Scholar]
- Chen, W.; Gu, S.; Zhu, L.; Zhang, H.; Zhu, H.; Guan, Y. Representation of Truss-style Structures for Autonomous Climbing of Biped Pole-climbing Robots. Robot. Auton. Syst. 2018, 101, 126–137. [Google Scholar] [CrossRef]
- Kuffner, J.; Nishiwaki, K.; Kagami, S.; Inaba, M. Footstep Planning among Obstacles for Biped Robots. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Maui, HI, USA, 29 October–3 November 2001; pp. 500–505. [Google Scholar]
- Kuffner, J.; Nishiwaki, K.; Kagami, S.; Inaba, M.; Inoue, H. Motion Planning for Humanoid Robots. Auton. Robot. 2003, 12, 692–698. [Google Scholar]
- Chestnutt, J.; Lau, M.; Cheung, G.; Kuffner, J.; Hodgins, J.; Kanade, T. Footstep Planning for the Honda ASIMO Humanoid. In Proceedings of the IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; pp. 629–634. [Google Scholar]
- Chestnutt, J.; Kuffner, J.; Nishiwaki, K.; Kagami, S. Planning Biped Navigation Strategies in Complex Environments. In Proceedings of the IEEE International Conference on Humanoid Robotics, Karlsruhe, Germany, 29–30 September 2003. [Google Scholar]
- Chestnutt, J.; Kuffner, J. A Tiered Planning Strategy for Biped Navigation. In Proceedings of the IEEE/RSJ International Conference on Humanoid Robots, Santa Monica, CA, USA, 10–12 November 2004; pp. 422–436. [Google Scholar]
- Ayaz, Y.; Munawar, K.; Malik, M.B.; Konno, A.; Uchiyama, M. Human-Like Approach to Footstep Planning Among Obstacles for Humanoid Robots. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October– 2 November 2007; pp. 5490–5495. [Google Scholar]
- Ayaz, Y.; Owa, T.; Tsujita, T.; Konno, A. Footstep planning for Humanoid Robots among Obstacles of Various Types. In Proceedings of the IEEE International Conference on Humanoid Robots, Paris, France, 7–10 December 2009; pp. 361–366. [Google Scholar]
- Deits, R.; Tedrake, R. Footstep Planning on Uneven Terrain with Mixed-integer Convex Optimization. In Proceedings of the IEEE/RSJ International Conference on Humanoid Robots, Madrid, Spain, 18–20 November 2014; pp. 279–286. [Google Scholar]
- Kuindersma, S.; Deits, R.; Fallon, M.; Valenzuela, A.; Dai, H.; Permenter, F.; Koolen, T.; Marion, P.; Tedrake, R. Optimization-based Locomotion Planning, Estimation, and Control Design for the ATLAS Humanoid Robot. Auton. Robot. 2016, 40, 429–455. [Google Scholar] [CrossRef]
- Guan, Y.; Yokoi, K.; Tanie, K. Feasibility: Can Humanoid Robots Overcome Given Obstacles? In Proceedings of the IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; pp. 1054–1059. [Google Scholar]
- Guan, Y.; Neo, E.S.; Yokoi, K.; Tanie, K. Stepping over Obstacles with Humanoid Robots. IEEE Trans. Robot. 2006, 22, 958–973. [Google Scholar] [CrossRef]
- Balaguer, C.; Padron, V.M.; Gimenez, A.; Pastor, J.M.; Abderrahim, M. Path Planning Strategy of Autonomous Climbing Robot for Inspection Applications in Construction. In Proceedings of the International Symposium on Automation and Robotics in Construction, Madrid, Spain, 22–24 September 1999. [Google Scholar]
- Detweiler, C.; Vona, M.; Kotay, K.; Rus, D. Hierarchical Control for Self-assembling Mobile Trusses with Passive and Active Links. In Proceedings of the IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; pp. 1483–1490. [Google Scholar]
- Chung, W.K.; Xu, Y. Minimum energy demand locomotion on space station. J. Robot. 2013, 2013, 723535. [Google Scholar] [CrossRef]
- Zhu, H.; Guan, Y.; Su, M.; Cai, C. Evaluation of Graspable Region and Selection of Footholds for Biped Pole-climbing Robots. In Proceedings of the IEEE International Conference on Robotics and Biomimetics, Bali, Indonesia, 5–10 December 2014; pp. 1757–1762. [Google Scholar]
- Zhu, H.; Gu, S.; He, L.; Guan, Y.; Zhang, H. Transition Analysis and Its Application to Global Path Determination for a Biped Climbing Robot. Appl. Sci. 2018, 8, 122. [Google Scholar] [CrossRef]
- Xiao, Z.; Wu, W.; Wu, J.; Zhu, H. Gripper Self-alignment for Autonomous Pole-grasping with a Biped Climbing Robot. In Proceedings of the IEEE International Conference on Robotics and Biomimetics, Guangzhou, China, 11–14 December 2012; pp. 181–186. [Google Scholar]
- Gu, S.; Su, M.; Zhu, H.; Guan, Y.; Rojas, J.; Zhang, H. Efficient Pole Detection and Grasping for Autonomous Biped Climbing Robots. In Proceedings of the IEEE International Conference on Robotics and Biomimetics, Macau, China, 5–8 December 2017; pp. 246–251. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gaits | Step Lengths | |
|---|---|---|
| Minimum | Maximum | |
| Inchworm-like gait | ||
| Hybrid gait | ||
| Swinging-around or Flipping-over gait | ||
| Hybrid gait | ||
| Items | Collision Avoidance | Route I | Route II | Route III |
|---|---|---|---|---|
| Number of via members | \ | 6 | 6 | 7 |
| Number of detected obstacle members | without | \ | \ | \ |
| with | 13 | 7 | 9 | |
| Number of grips | without | 21 | 28 | 29 |
| with | 28 | 31 | 34 | |
| Time consumption (s) | without | 0.12 | 0.11 | 0.13 |
| with | 0.65 | 0.62 | 0.63 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, S.; Zhu, H.; Li, H.; Guan, Y.; Zhang, H. Optimal Collision-Free Grip Planning for Biped Climbing Robots in Complex Truss Environment. Appl. Sci. 2018, 8, 2533. https://doi.org/10.3390/app8122533
Gu S, Zhu H, Li H, Guan Y, Zhang H. Optimal Collision-Free Grip Planning for Biped Climbing Robots in Complex Truss Environment. Applied Sciences. 2018; 8(12):2533. https://doi.org/10.3390/app8122533
Chicago/Turabian StyleGu, Shichao, Haifei Zhu, Hui Li, Yisheng Guan, and Hong Zhang. 2018. "Optimal Collision-Free Grip Planning for Biped Climbing Robots in Complex Truss Environment" Applied Sciences 8, no. 12: 2533. https://doi.org/10.3390/app8122533
APA StyleGu, S., Zhu, H., Li, H., Guan, Y., & Zhang, H. (2018). Optimal Collision-Free Grip Planning for Biped Climbing Robots in Complex Truss Environment. Applied Sciences, 8(12), 2533. https://doi.org/10.3390/app8122533