Performance Analysis and Improvement of Optical Camera Communication





Abstract
1. Introduction
- We briefly explore the role of LED and camera parameters in determining OCC performance. Variations in these parameters lead to our insights on variations in the OCC performance. We focus on key issues related to the quality of service, including data-rate enhancement, SINR improvement, increasing the communication distance, and decreasing BER.
- We present a channel model for OCC based on Lambertian radiant intensity [14]. The channel model is also used as the basis for our analysis of pixel SINR.
- We provide a theoretical representation of OCC users’ satisfaction.
- We conducted a short survey of existing modulation schemes and categorize them according to communication distance and data-rate characteristics in order to enable us to select the appropriate scheme for a specific application.
- We present simulation results (including the outage probability analysis for OCC) that demonstrate which values of the parameters are optimal to achieve the required OCC output for performance improvement.
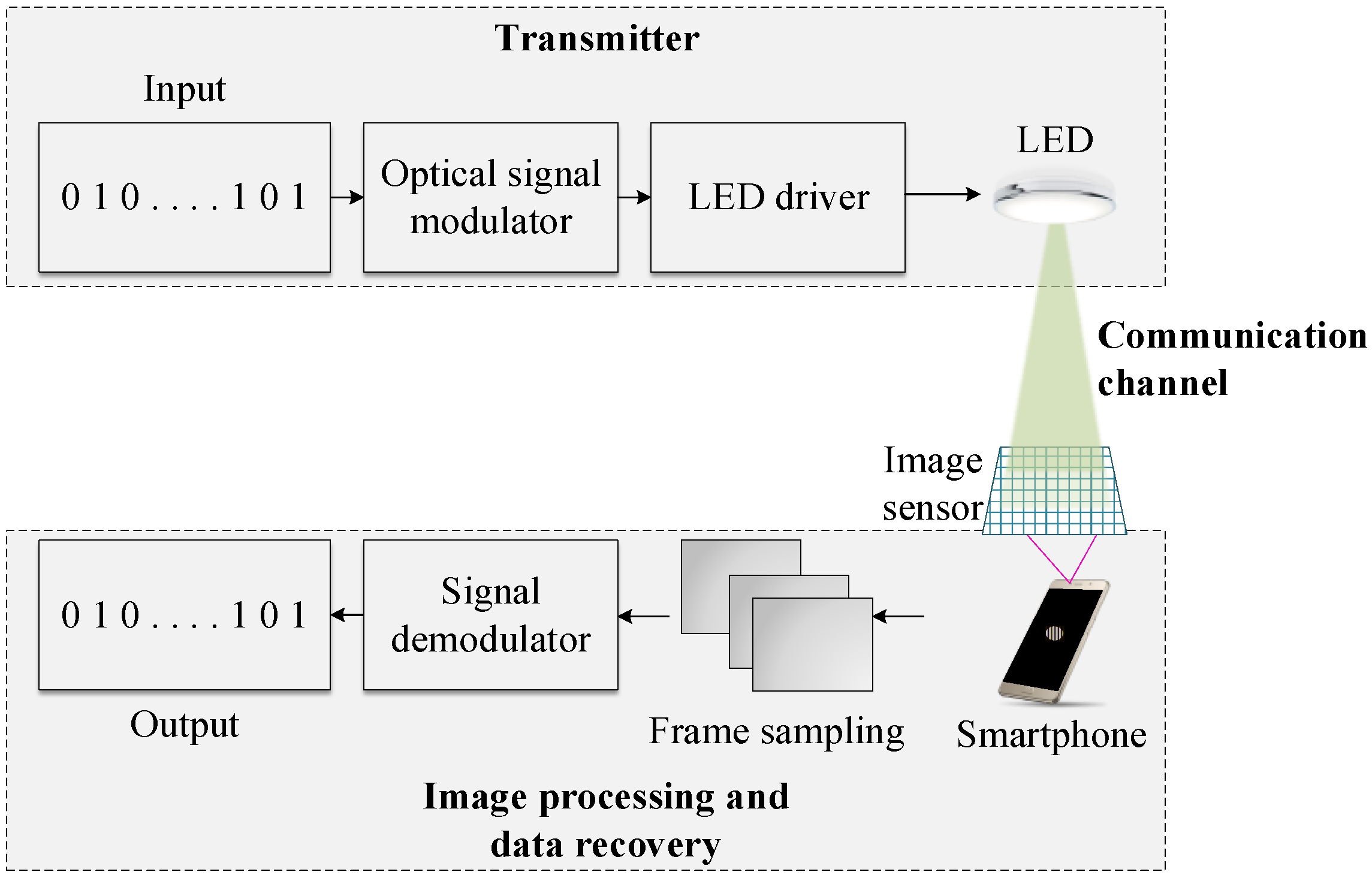
2. OCC System Overview
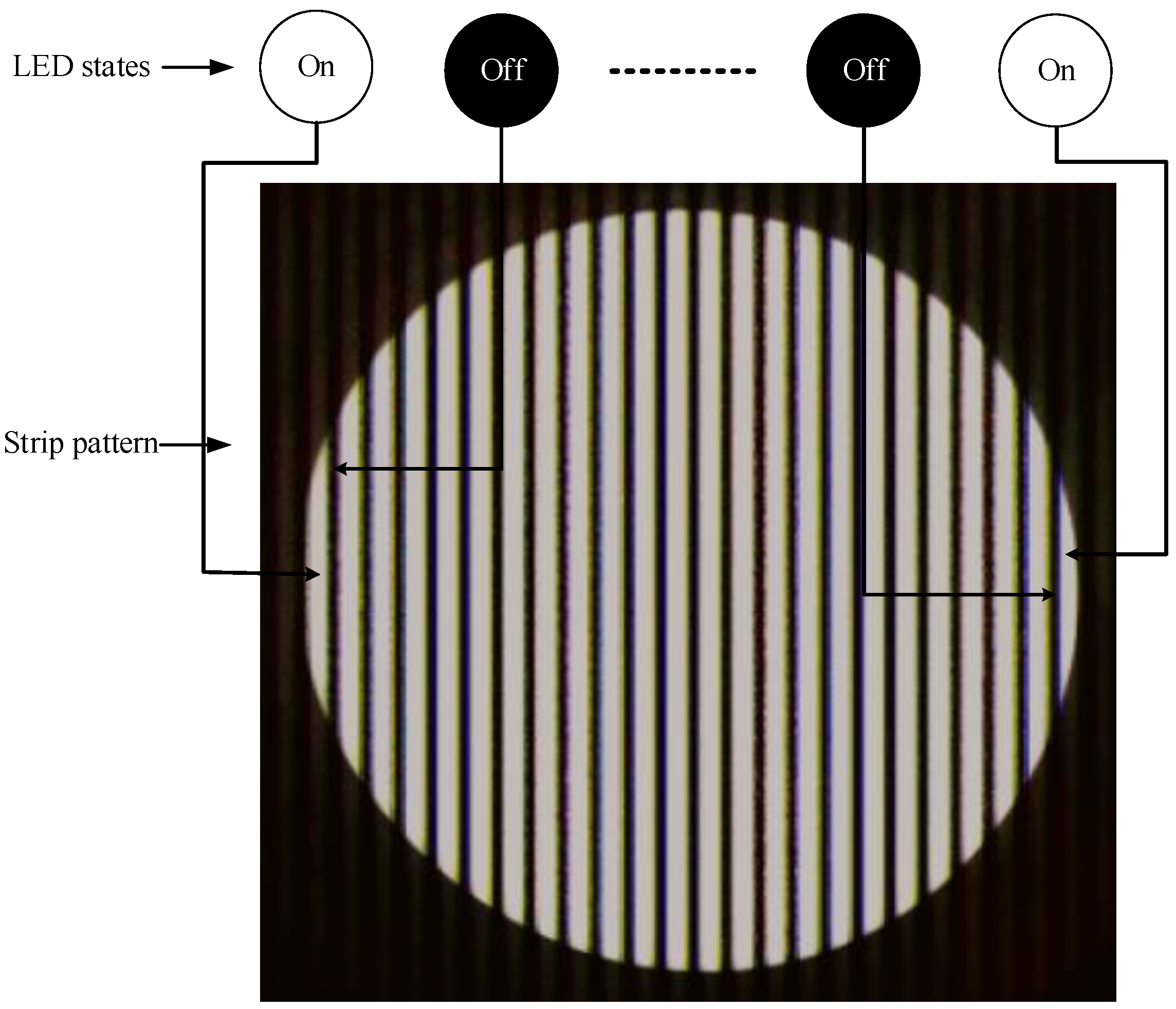
2.1. Data Decoding Principle
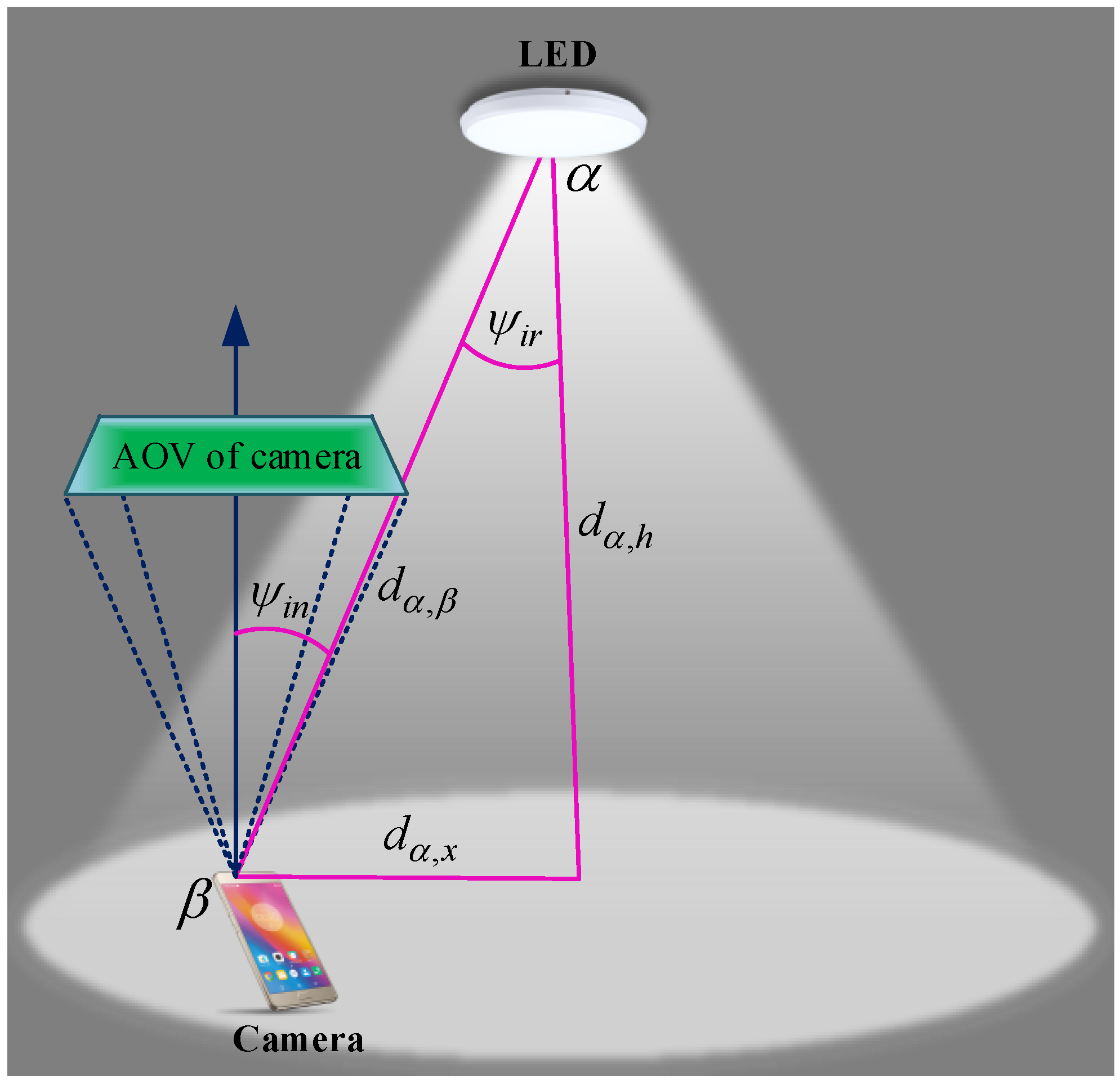
2.2. Illumination Model for Camera Pixels
2.3. Pixel SINR
3. OCC Performance Improvement
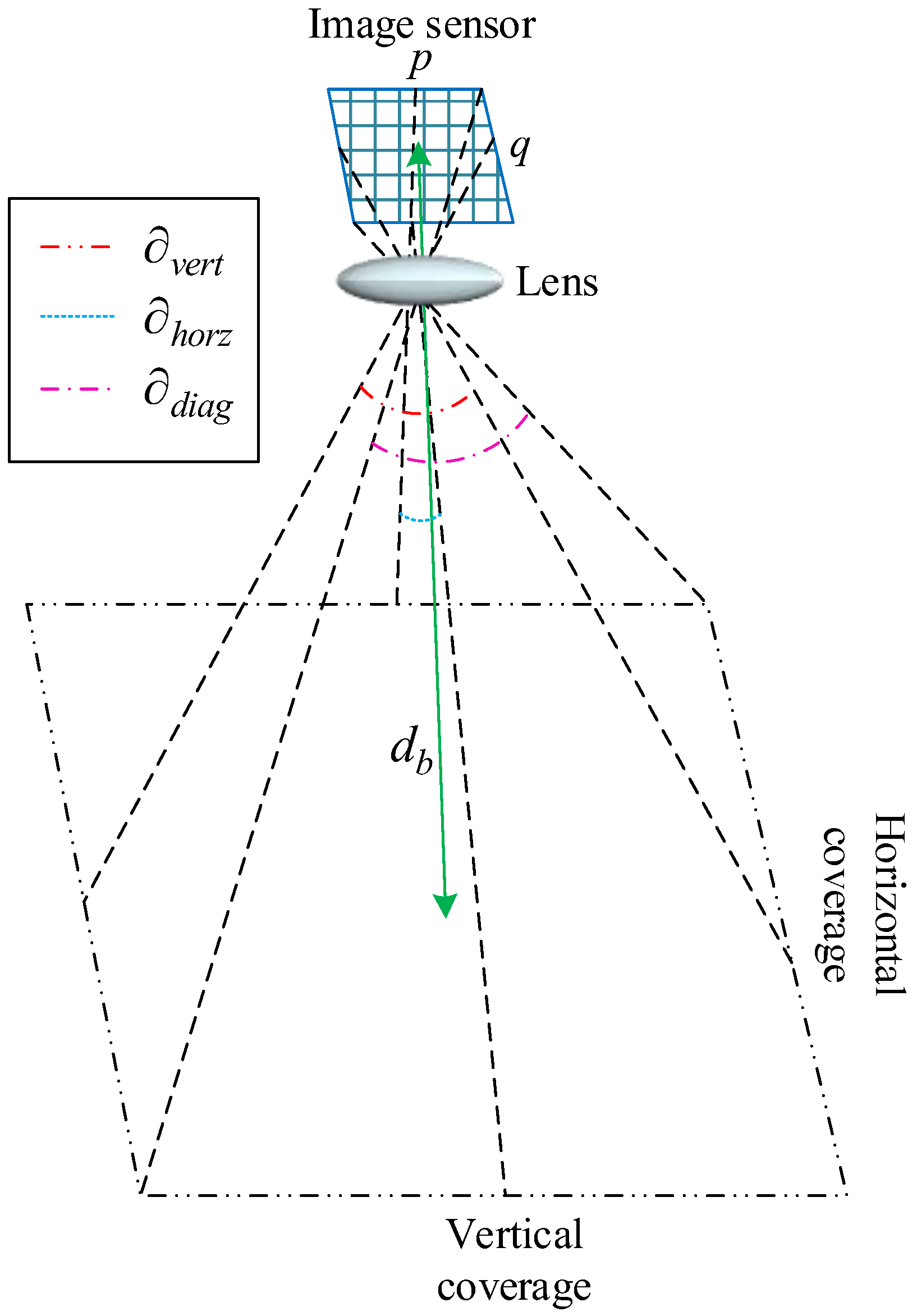
3.1. Focal Length and Pixel Edge Length
3.2. Strip Configurations
3.3. Camera Sampling Rate and Shutter Speed
3.4. LED Size
3.5. MIMO Functionality
4. Modulation Schemes
4.1. Communication Distance
4.2. Data Rate
5. OCC User Satisfaction
6. Performance Evaluation
7. Conclusions and Future Research
Author Contributions
Funding
Conflicts of Interest
References
- Chowdhury, M.Z.; Hossan, M.T.; Islam, A.; Jang, Y.M. A comparative survey of optical wireless technologies: Architectures and applications. IEEE Access 2018, 6, 9819–9840. [Google Scholar] [CrossRef]
- Islam, A.; Hossan, M.T.; Jang, Y.M. Convolutional neural network scheme–based optical camera communication system for intelligent Internet of vehicles. Int. J. Distrib. Sens. Netw. 2018, 14. [Google Scholar] [CrossRef]
- Yamazato, T.; Kinoshita, M.; Arai, S.; Souke, E.; Yendo, T.; Fujii, T.; Kamakura, K.; Okada, H. Vehicle motion and pixel illumination modeling for image sensor based visible light communication. IEEE J. Sel. Areas Commun. 2015, 33, 1793–1805. [Google Scholar] [CrossRef]
- Takai, I.; Harada, T.; Andoh, M.; Yasutomi, K.; Kagawa, K.; Kawahito, S. Optical vehicle-to-vehicle communication system using LED transmitter and camera receiver. IEEE Photonics J. 2014, 6, 1–14. [Google Scholar] [CrossRef]
- Lin, B.; Ghassemlooy, Z.; Lin, C.; Tang, X.; Li, Y.; Zhang, S. An indoor visible light positioning system based on optical camera communications. IEEE Photonics Technol. Lett. 2017, 29, 579–582. [Google Scholar] [CrossRef]
- Armstrong, J.; Sekercioglu, Y.A.; Neild, A. Visible light positioning: A roadmap for international standardization. IEEE Commun. Mag. 2013, 51, 68–73. [Google Scholar] [CrossRef]
- Shahjalal, M.; Hossan, M.T.; Hasan, M.K.; Chowdhury, M.Z.; Le, N.T.; Jang, Y.M. An implementation approach and performance analysis of image sensor based multilateral indoor localization and navigation system. Wirel. Commun. Mob. Comput. 2018, 2018, 7680780. [Google Scholar] [CrossRef]
- Luo, P.; Ghassemlooy, Z.; Minh, H.L.; Tang, X.; Tsai, H.M. Undersampled phase shift ON-OFF keying for camera communication. In Proceedings of the International Conference on Wireless Communications and Signal Processing (WCSP), Hefei, China, 23–24 October 2014. [Google Scholar]
- Lee, H.; Lee, I.; Lee, S.H. Deep learning based transceiver design for multi-colored VLC systems. Opt. Express 2018, 26, 6222–6238. [Google Scholar] [CrossRef]
- Chow, C.; Chen, C.; Chen, S. Enhancement of signal performance in LED visible light communications using mobile phone camera. IEEE Photonics J. 2015, 7, 1–7. [Google Scholar] [CrossRef]
- Nagura, T.; Yamazato, T.; Katayama, M.; Yendo, T.; Fujii, T.; Okada, H. Improved Decoding Methods of visible light communication system for ITS using LED array and high-speed camera. In Proceedings of the IEEE Vehicular Technology Conference, Taipei, Taiwan, 16–19 May 2010. [Google Scholar]
- Tian, P.; Huang, W.; Xu, Z. Design and experimental demonstration of a real-time 95kbps optical camera communication system. In Proceedings of the International Symposium on Communication Systems, Networks and Digital Signal Processing (CSNDSP), Prague, Czech Republic, 20–22 July 2016. [Google Scholar]
- Luo, P.; Zhang, M.; Ghassemlooy, Z.; le Minh, H.; Tsai, H.; Tang, X.; Png, L.C.; Han, D. Experimental demonstration of RGB LED-based optical camera communications. IEEE Photonics J. 2015, 7, 1–12. [Google Scholar] [CrossRef]
- Kahn, J.M.; Barry, J.R. Wireless infrared communications. Proc. IEEE 1997, 85, 265–298. [Google Scholar] [CrossRef]
- Saha, N.; Ifthekhar, M.S.; Le, N.T.; Jang, Y.M. Survey on optical camera communications: Challenges and opportunities. IET Optoelectron. 2015, 9, 172–183. [Google Scholar] [CrossRef]
- Hasan, M.K.; Chowdhury, M.Z.; Shahjalal, M.; Jang, Y.M. Fuzzy based network assignment and link-switching analysis in hybrid OCC/LiFi system. Wirel. Commun. Mob. Comput. 2018, 2018, 2870518. [Google Scholar] [CrossRef]
- Teli, S.; Chung, Y. Selective capture based high-speed optical vehicular signaling system. Signal Process. Image Commun. 2018, 68, 241–248. [Google Scholar] [CrossRef]
- Ashok, A.; Jain, S.; Gruteser, M.; Mandayam, N.; Yuan, W.; Dana, K. Capacity of screen-camera communications under perspective distortions. Pervasive Mob. Comput. 2015, 16, 239–250. [Google Scholar] [CrossRef]
- Liang, K.; Chow, C.; Liu, Y. Mobile-phone based visible light communication using region-grow light source tracking for unstable light source. Opt. Express 2016, 24, 1–6. [Google Scholar] [CrossRef] [PubMed]
- Chow, C.; Chen, C.Y.; Chen, S.H. Visible light communication using mobile-phone camera with data rate higher than frame rate. Opt. Express 2015, 23, 26080–26085. [Google Scholar] [CrossRef]
- Ji, P.; Tsai, H.; Wang, C.; Liu, F. Vehicular visible light communications with LED taillight and rolling shutter camera. In Proceedings of the IEEE 79th Vehicular Technology Conference, Seoul, Korea, 18–21 May 2014. [Google Scholar]
- Goto, Y.; Takai, I.; Yamazato, T.; Okada, H.; Fujii, T.; Kawahito, S.; Arai, S.; Yendo, T.; Kamakura, K. A new automotive VLC system using optical communication image sensor. IEEE Photonics J. 2016, 8, 1–17. [Google Scholar] [CrossRef]
- Roberts, R.D. Undersampled frequency shift ON-OFF keying (UFSOOK) for camera communications (CamCom). In Proceedings of the Wireless and Optical Communication Conference, Chongqing, China, 16–18 May 2013. [Google Scholar]
- Kim, B.W.; Jung, S. Novel flicker-free optical camera communications based on compressed sensing. IEEE Commun. Lett. 2016, 20, 1104–1107. [Google Scholar] [CrossRef]
- Roberts, R.D. MIMO protocol for camera communication (CamCom) using undersampled frequency shift ON-OFF keying (UFSOOK). In Proceedings of the Optical Wireless Communications GlobeCom Workshop, Atlanta, GA, USA, 9–13 December 2013. [Google Scholar]
- Chen, S.; Chow, C. Color-shift keying and code-division multiple-access transmission for RGB-LED visible light communications using mobile phone camera. IEEE Photonics J. 2014, 6, 1–6. [Google Scholar] [CrossRef]
- Hu, P.; Pathak, P.H.; Feng, X.; Fu, H.; Mohapatra, P. Colorbars: Increasing data rate of LED-to-camera communication using color shift keying. In Proceedings of the ACM International Conference on Emerging Networking and Experiments and Technologies, Heidelberg, Germany, 1–4 December 2015. [Google Scholar]
- Singh, R.; O’Farrell, T.; David, J.P.R. An enhanced color shift keying modulation scheme for high-speed wireless visible light communications. J. Lightw. Technol. 2014, 32, 2582–2592. [Google Scholar] [CrossRef]
- Luo, P.; Zhang, M.; Ghassemlooy, Z.; le Minh, H.; Tsai, H.; Tang, X.; Han, D. Experimental demonstration of a 1024-qam optical camera communication system. IEEE Photonics Technol. Lett. 2014, 28, 139–142. [Google Scholar] [CrossRef]
- Rachim, V.P.; Chung, W. Multilevel intensity-modulation for rolling shutter-based optical camera communication. IEEE Photonics Technol. Lett. 2018, 30, 903–906. [Google Scholar] [CrossRef]
- Luo, P.; Jiang, T.; Haigh, P.A.; Ghassemlooy, Z.; Zvanovec, S. Undersampled pulse width modulation for optical camera communications. In Proceedings of the IEEE International Conference on Communications Workshops (ICC Workshops), Kansas City, MO, USA, 20–24 May 2018. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scheme | RGB LED | Under Sampling | Frame Rate (fps) | Data Rate | Distance | Possible Application Scenarios |
|---|---|---|---|---|---|---|
| OOK [10] | × | × | 28 | 896 bps | 25 cm | LBS |
| UFSOOK [21,23,25] | × | √ | 30 [21] | 15 bps [21] | 40 cm [21] | V2X, LBS |
| CSK [26,27,28] | √ | × | 30 [26,27] | 240 bps [26] 5.2 kbps [27] | 50 cm [26] 3 cm [27] | LBS |
| UPSOOK [13] | √ | √ | 50 | 150 bps | 60 m | V2X |
| UQAMSM [29] | × | √ | 50 | 500 bps | 1.5 m | LBS |
| m-IM [30] | √ | × | 30 | >10 kbps | 2 m | Digital signage, LBS |
| UPWM [31] | × | √ | 30 | 150 bps | 1 m | LBS |
| DCO-OFDM [22] | √ | × | 30 | 55 Mbps | 1.5 m | V2X, AR |
| CSK and multilevel PAM [12] | √ | × | 330 | 95 kbps | 1.2 m | V2X and large data transfer |
| LED Parameters | |
| Gain of the optical filter, | 1 |
| Transmitted optical power | 10 W |
| Half-intensity radiation angle, | |
| Camera Parameters | |
| Image sensor size, | (3:2 aspect ratio) |
| Pixel edge length, | |
| Camera optical to electrical conversion efficiency, | 0.51 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hasan, M.K.; Chowdhury, M.Z.; Shahjalal, M.; Nguyen, V.T.; Jang, Y.M. Performance Analysis and Improvement of Optical Camera Communication. Appl. Sci. 2018, 8, 2527. https://doi.org/10.3390/app8122527
Hasan MK, Chowdhury MZ, Shahjalal M, Nguyen VT, Jang YM. Performance Analysis and Improvement of Optical Camera Communication. Applied Sciences. 2018; 8(12):2527. https://doi.org/10.3390/app8122527
Chicago/Turabian StyleHasan, Moh. Khalid, Mostafa Zaman Chowdhury, Md. Shahjalal, Van Thang Nguyen, and Yeong Min Jang. 2018. "Performance Analysis and Improvement of Optical Camera Communication" Applied Sciences 8, no. 12: 2527. https://doi.org/10.3390/app8122527
APA StyleHasan, M. K., Chowdhury, M. Z., Shahjalal, M., Nguyen, V. T., & Jang, Y. M. (2018). Performance Analysis and Improvement of Optical Camera Communication. Applied Sciences, 8(12), 2527. https://doi.org/10.3390/app8122527