Mesh Twisting Technique for Swirl Induced Laminar Flow Used to Determine a Desired Blade Shape



Abstract
1. Introduction
2. Materials and Methods
2.1. Governing Equations
- Inlet:
- Velocity is purely axial, with a velocity profile specified in accordance with Equation (4) with an average velocity of 1 m/s (corresponding to Re ). The normal gradient of pressure is set to zero, thus .
- Outlet:
- The normal gradient of all velocity components is set to zero. Pressure normal gradient is still zero, but with a fixed average value of 0 which sets a reference pressure for the whole system.
- Walls:
- No slip is allowed for the velocity, effectively setting , and the normal gradient of pressure is zero.
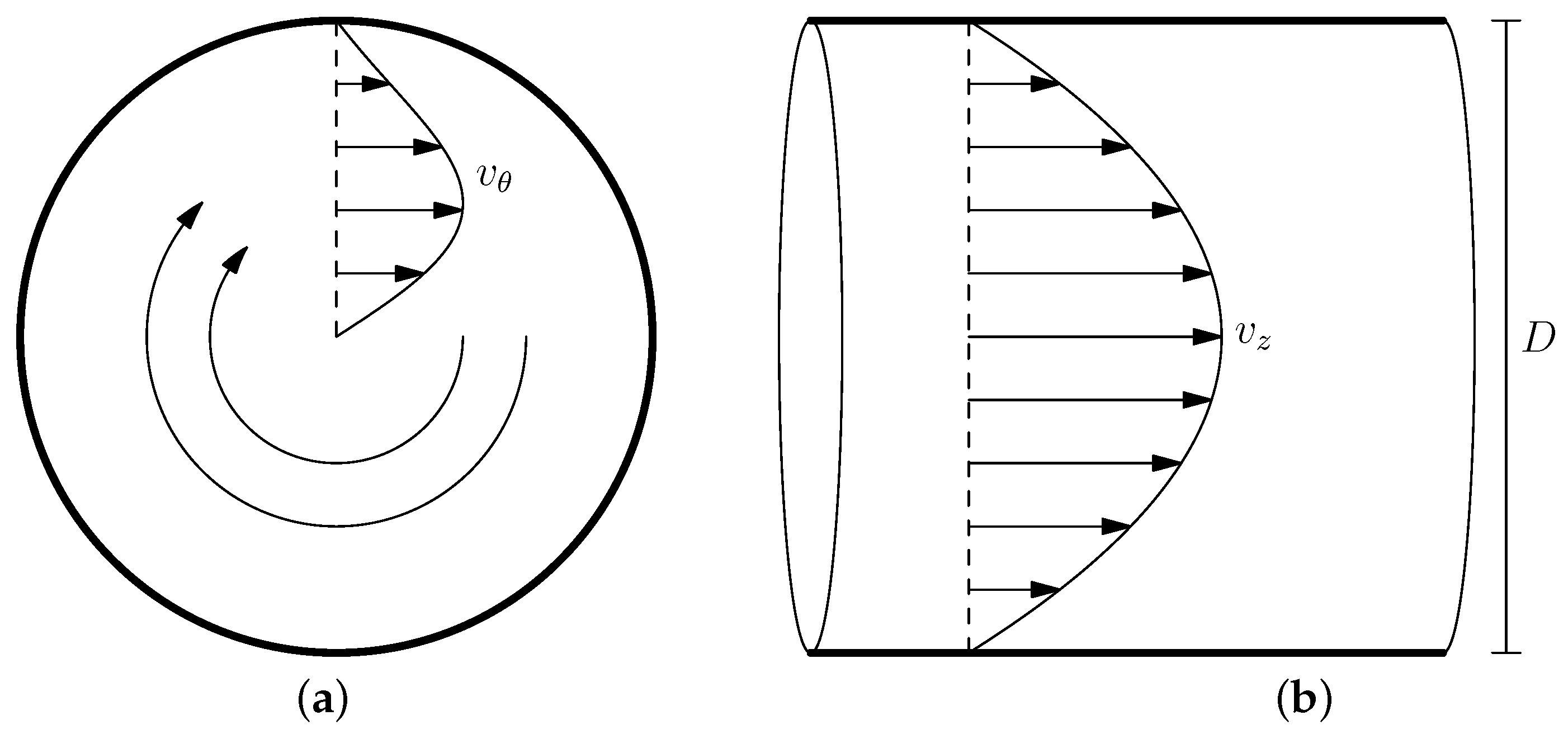
2.2. Swirling Flow
2.3. Numerical Approach
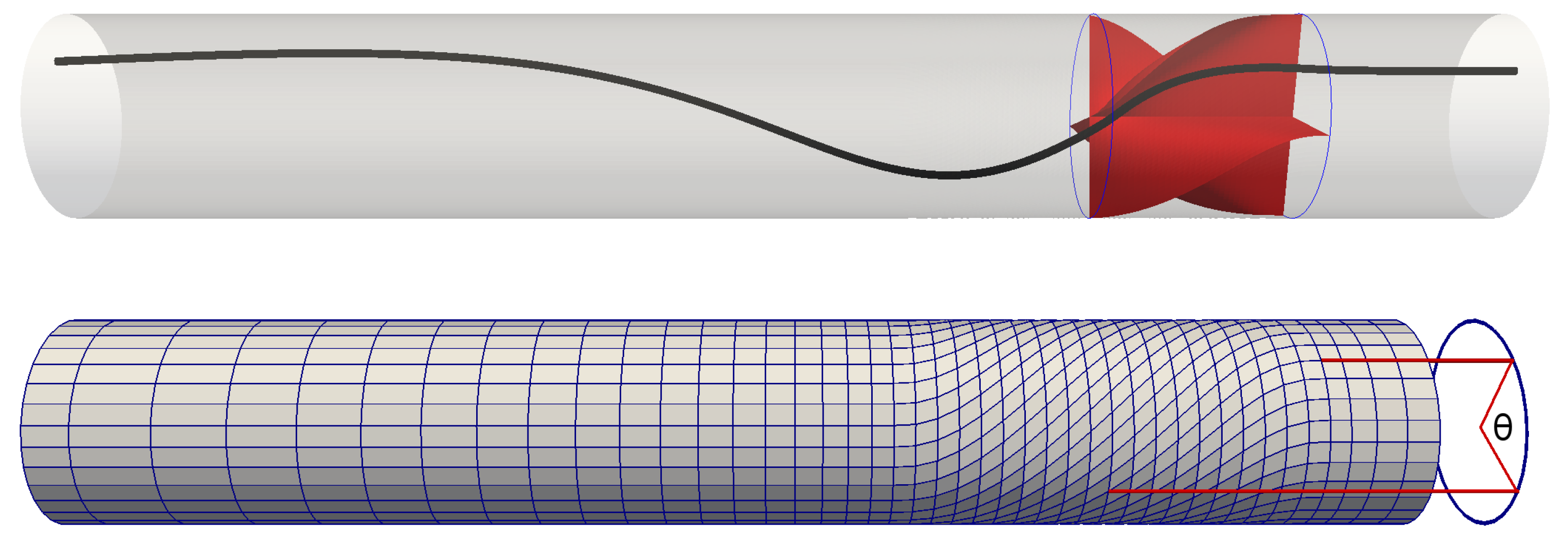
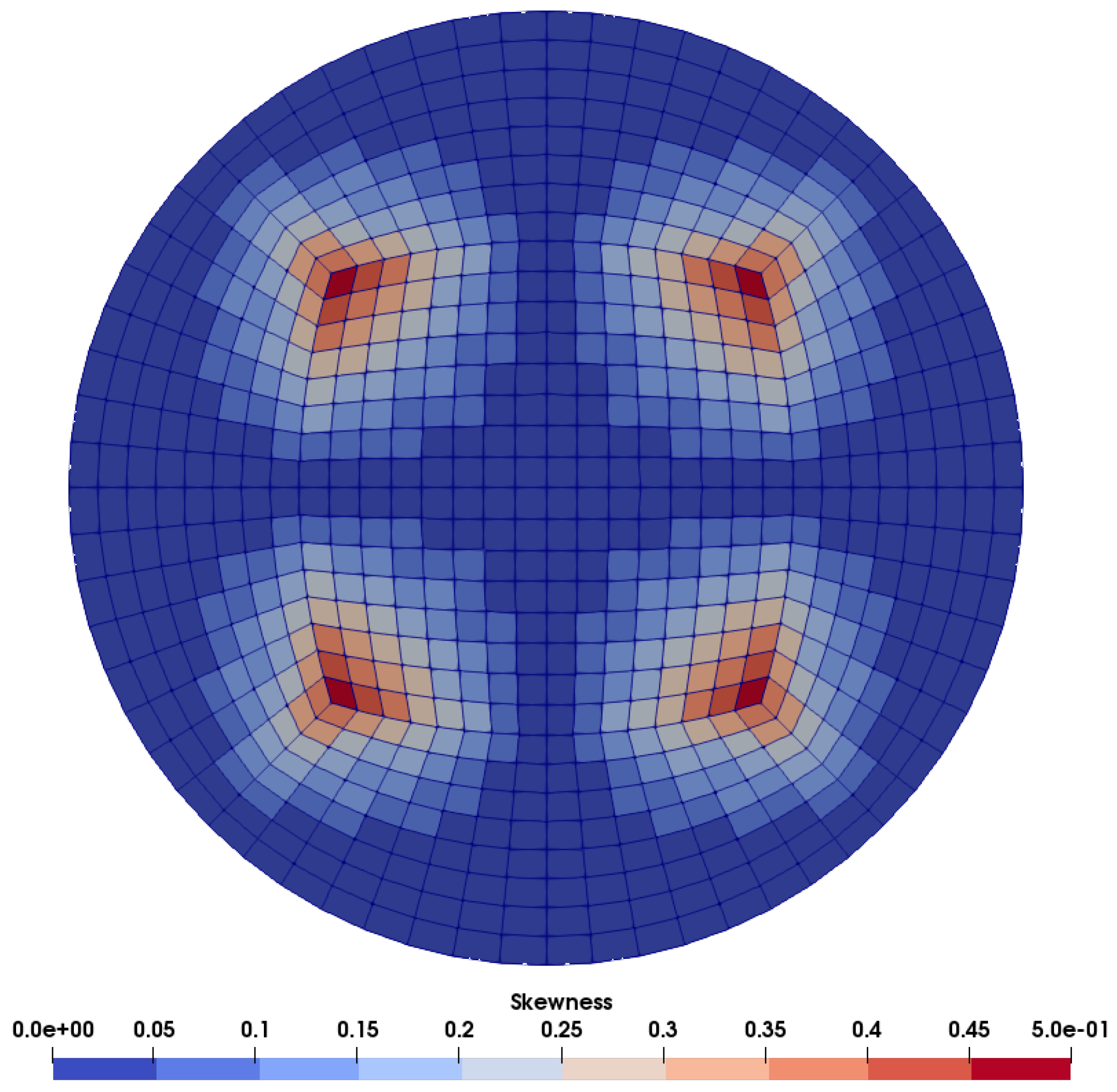
2.4. Mesh Morphing
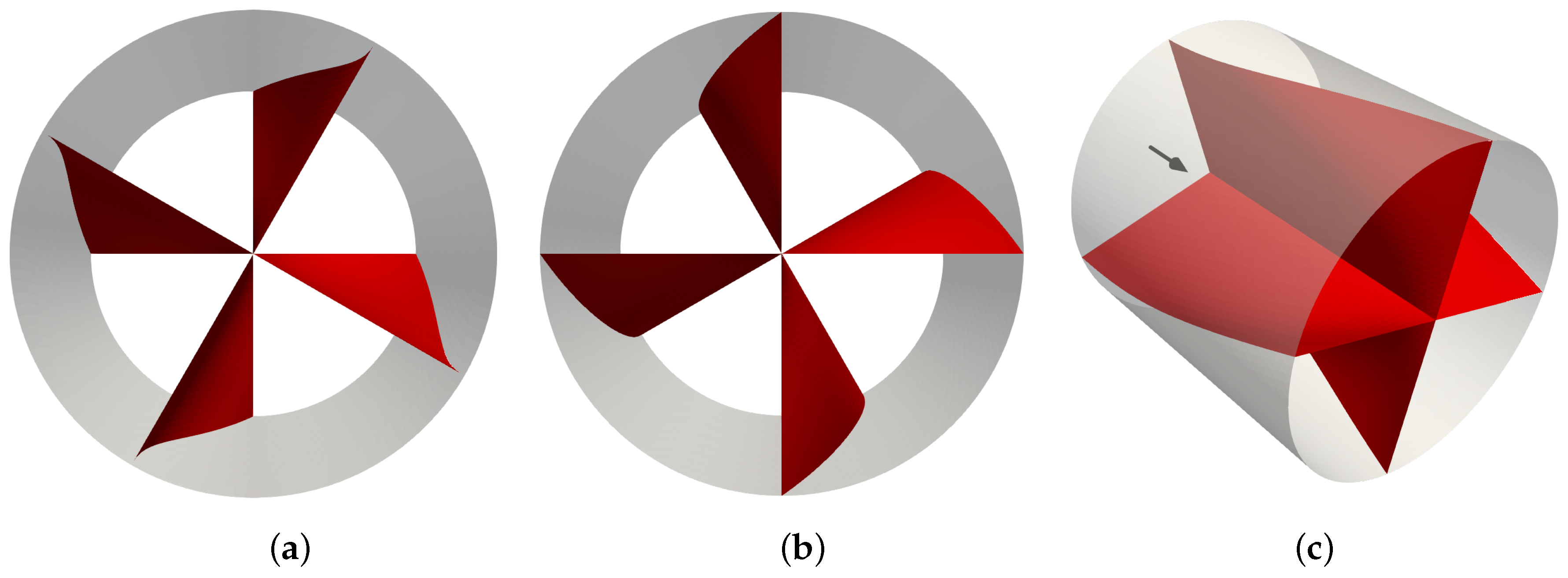
2.5. Constructing Guidance Blades
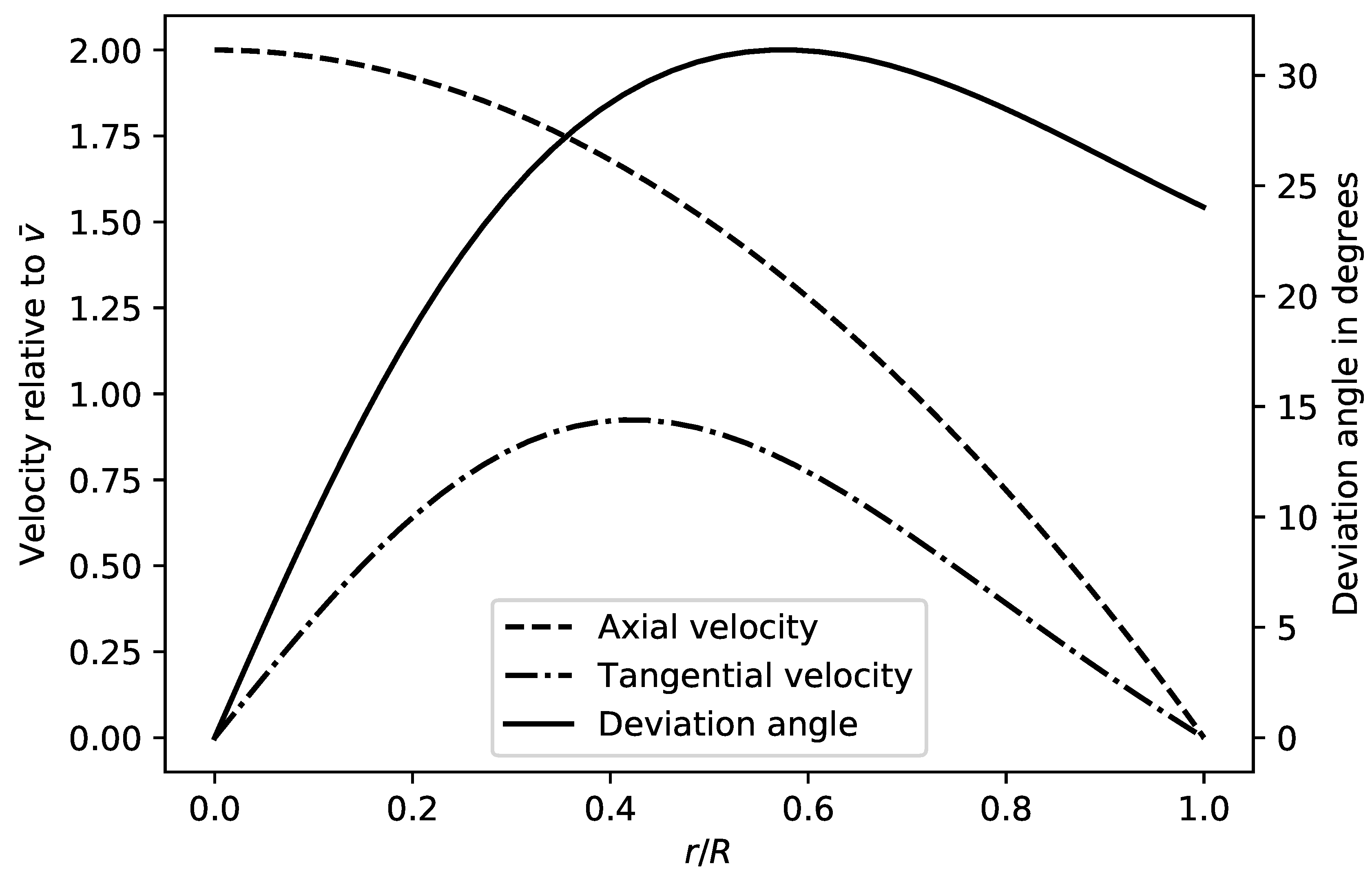
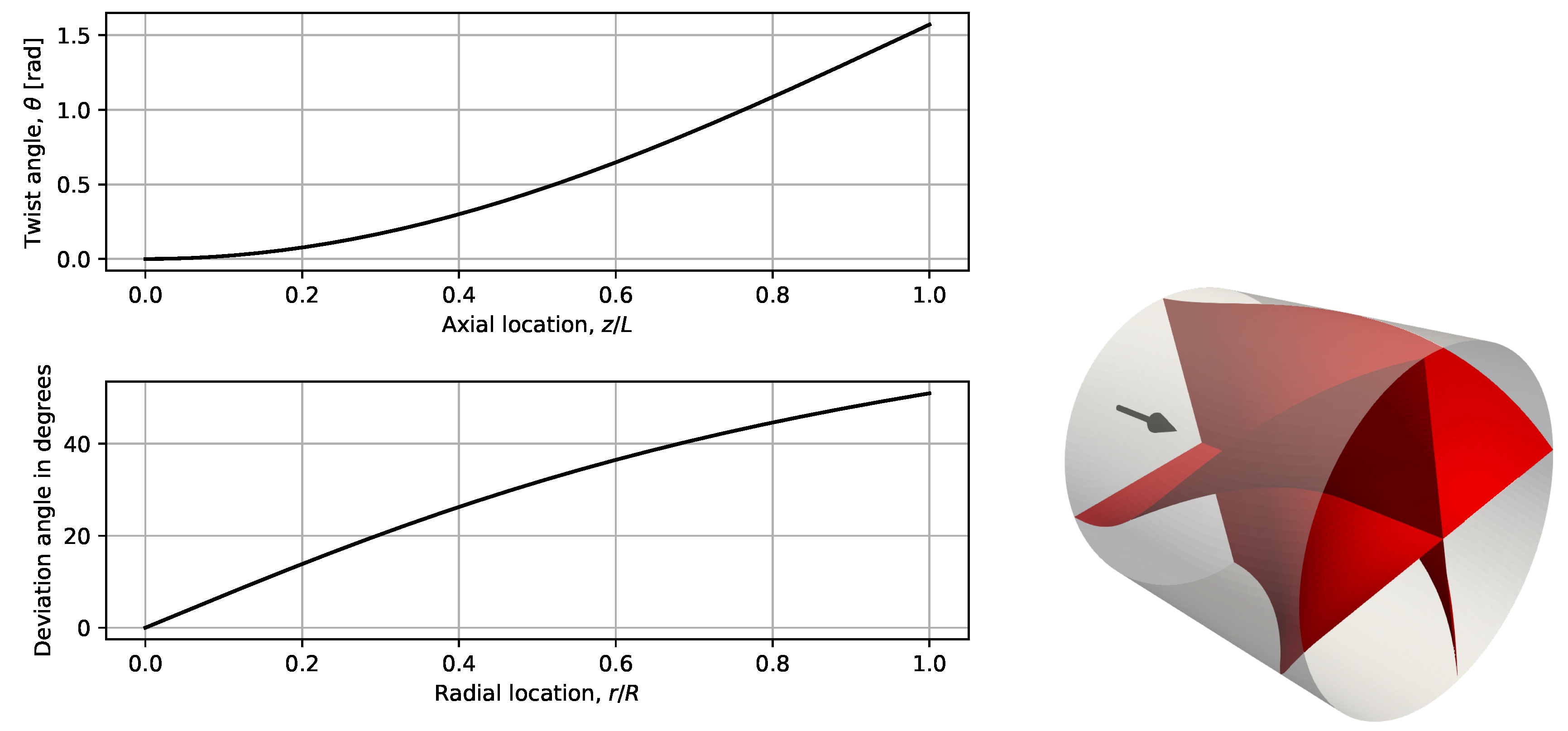
- Blades where changes linearly from the center of the pipe to the outer wall, assuming that is the deviation angle. This is equivalent to constructing a single shape of blade, defined by a twist angle as a function of axial location z but not affected by radial location r.
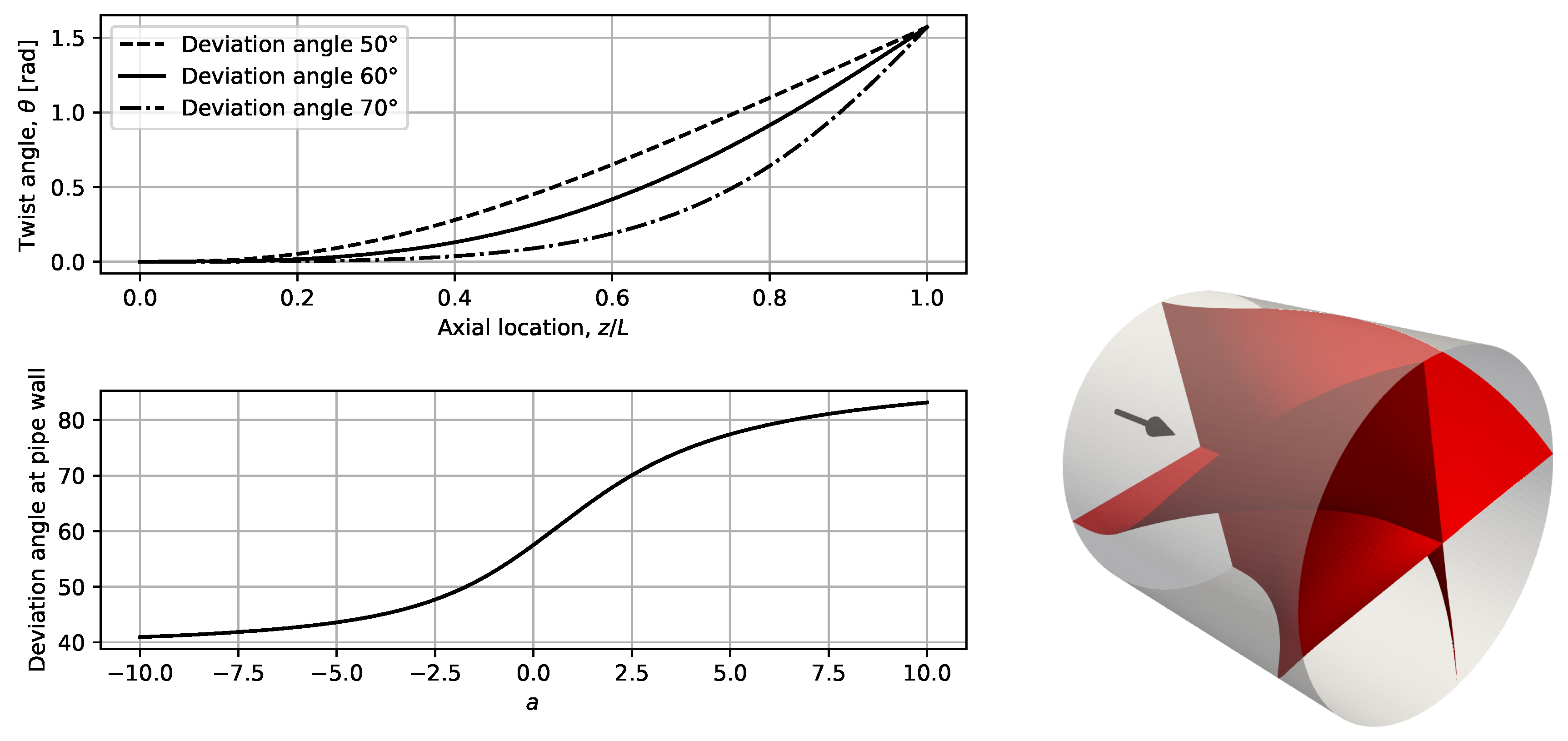
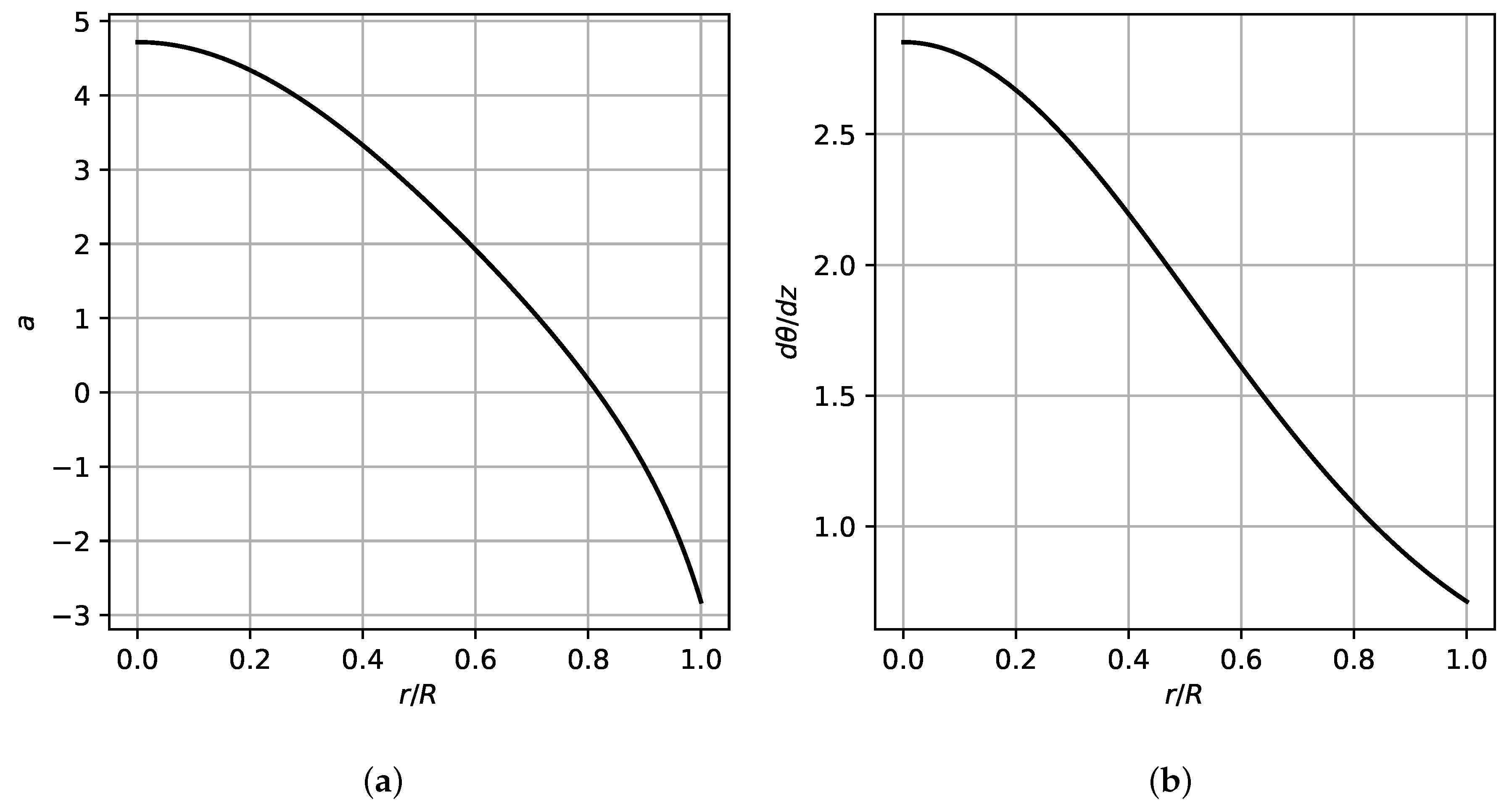
- Blades where the deviation angle changes along the pipe axis, but also follows at the exit the angle defined in Figure 2, in the radial direction.
- Same blade setup as in Case II, but where 20% of the inner core is removed, thus reducing the flow restriction because of the blade connections in the center.
- The curvature at the inlet and exit is zero.
- The twist angle is zero at the inlet () and at the exit ().
- The slope with respect to (deviation) is zero at the inlet, but is controlled by a at the exit.
- The deviation grows monotonically from the inlet to the exit, regardless of the selection of a.
| Algorithm 1: Mesh morphing process. |
|
3. Results and Discussion
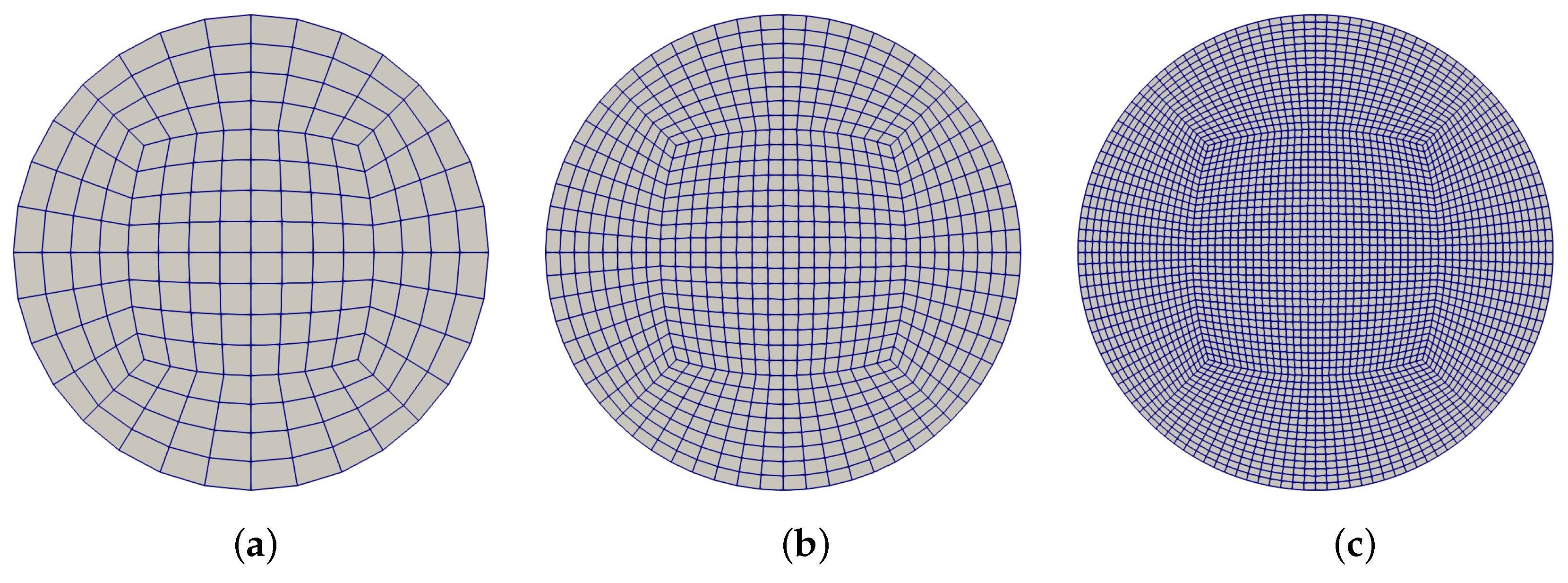
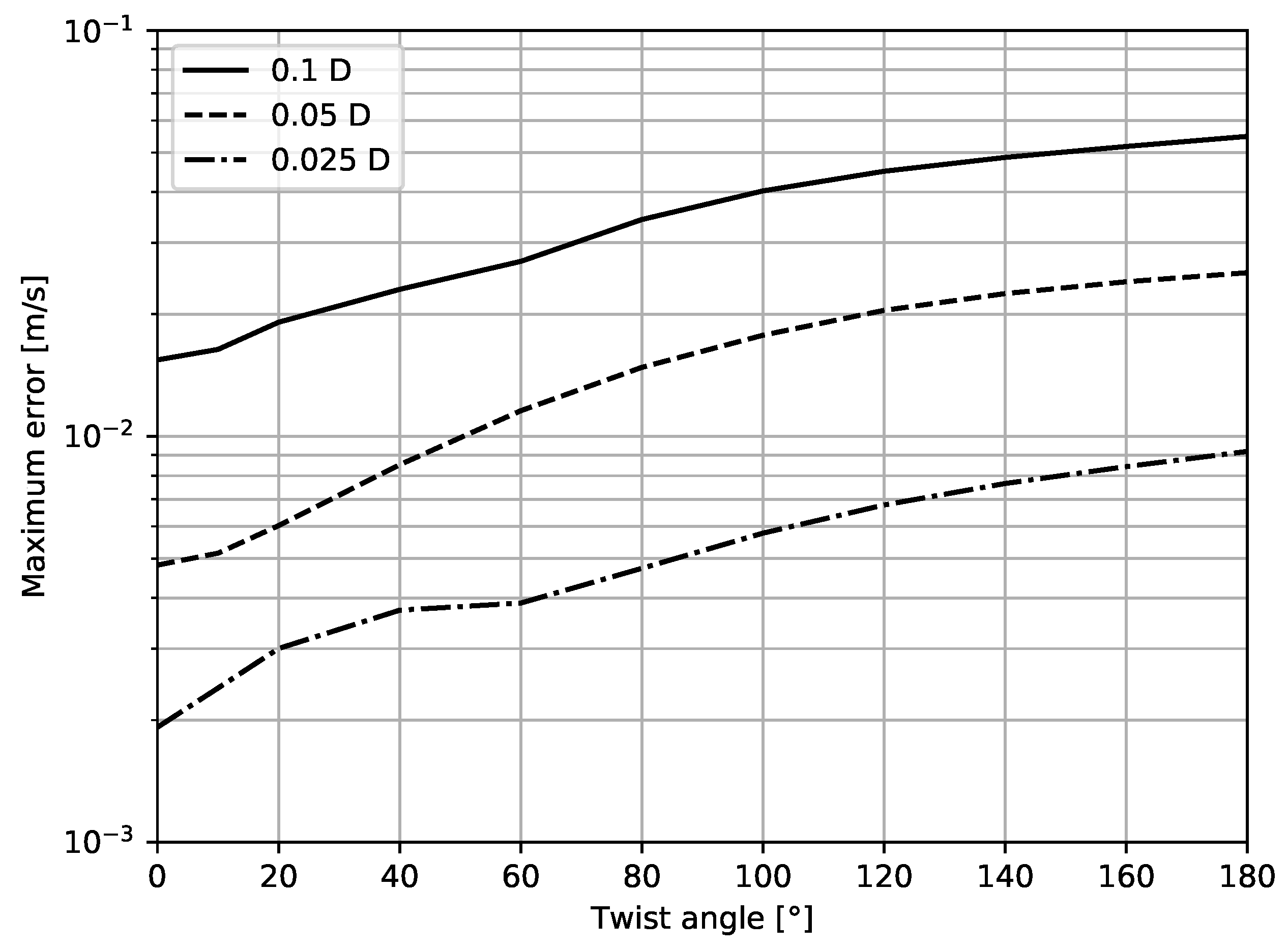
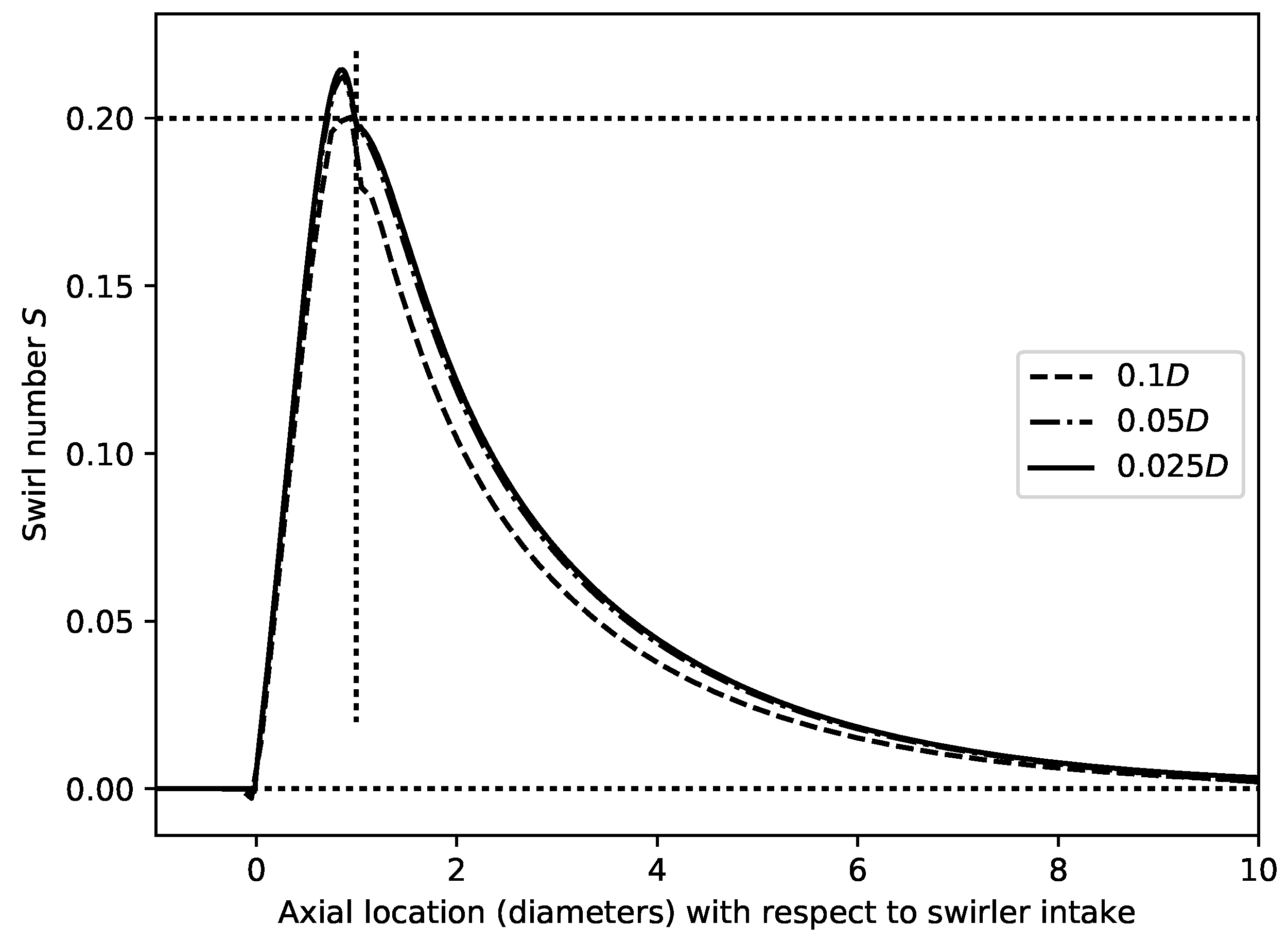
3.1. Mesh Size and Twisting Sensitivity
3.2. Guidance Blade Design
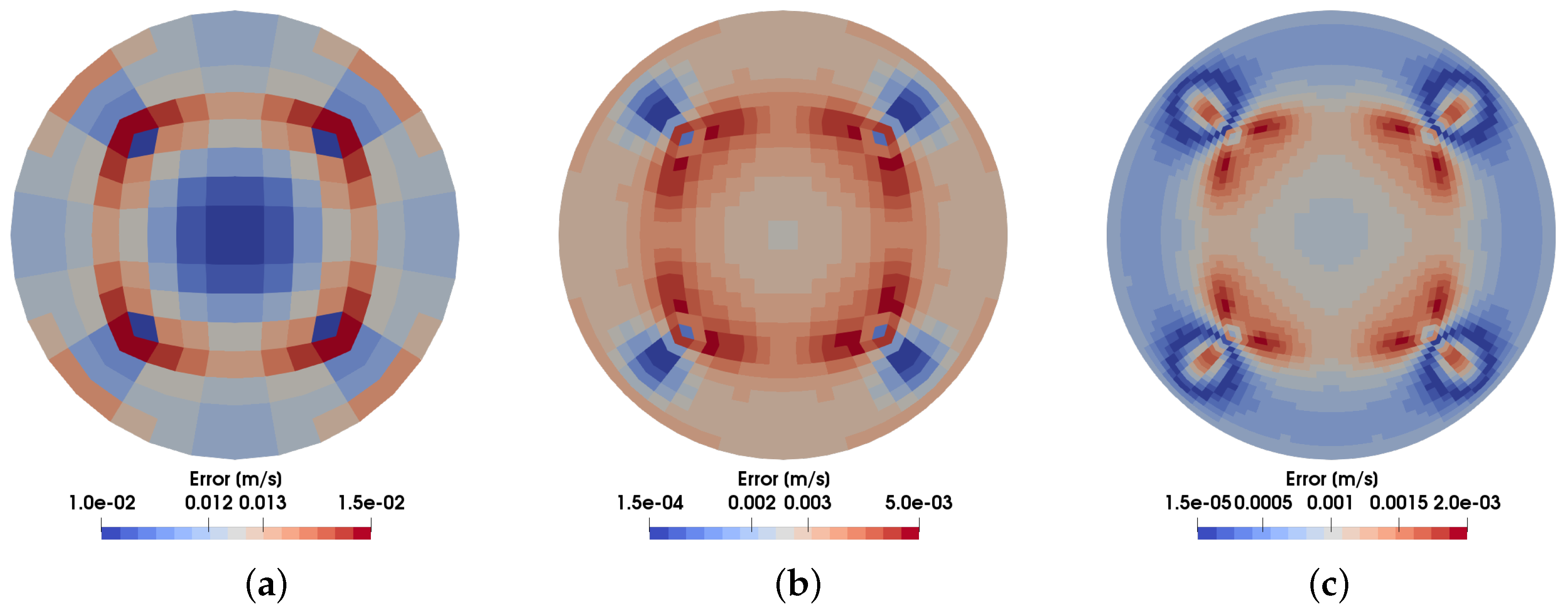
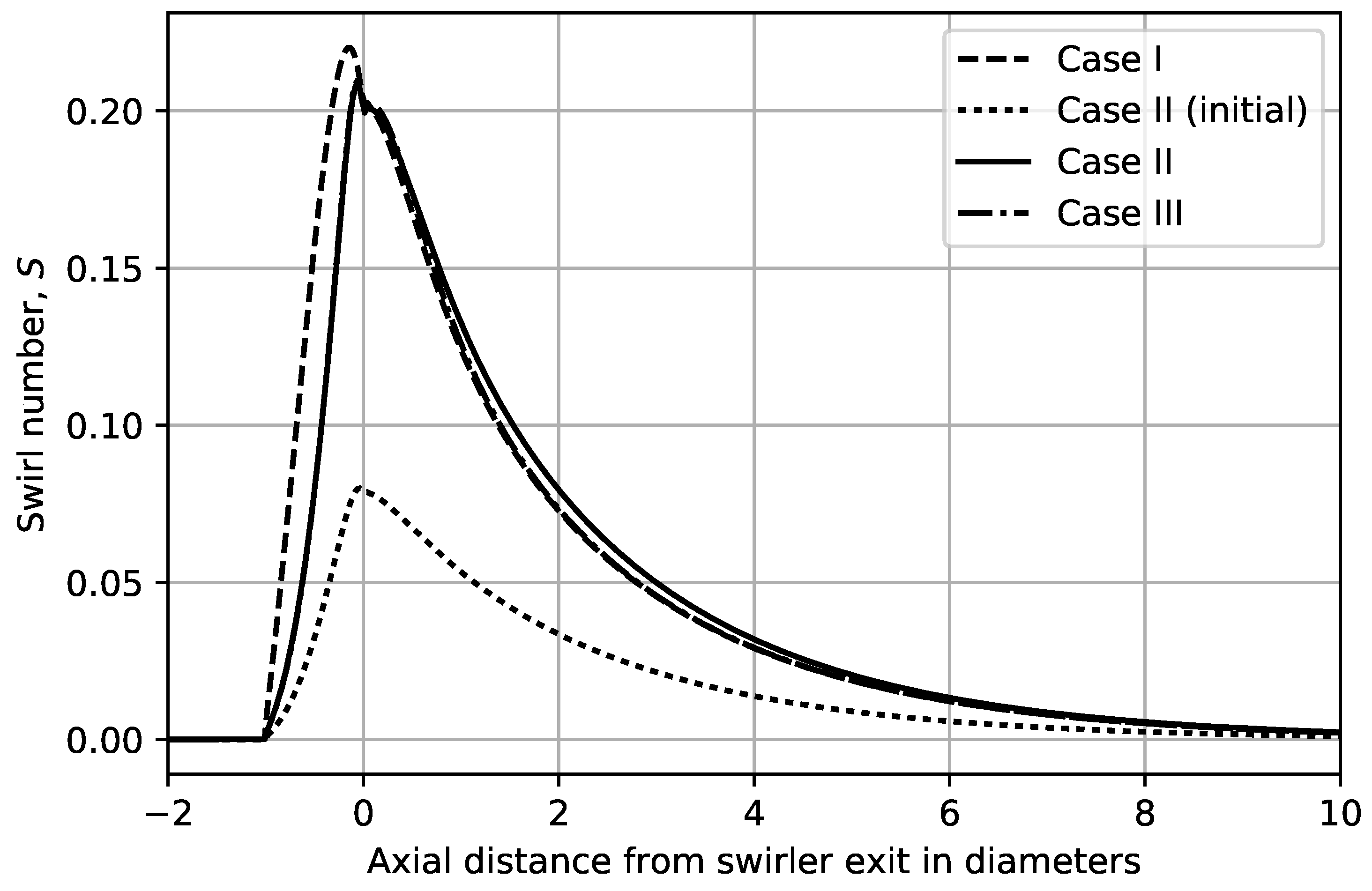
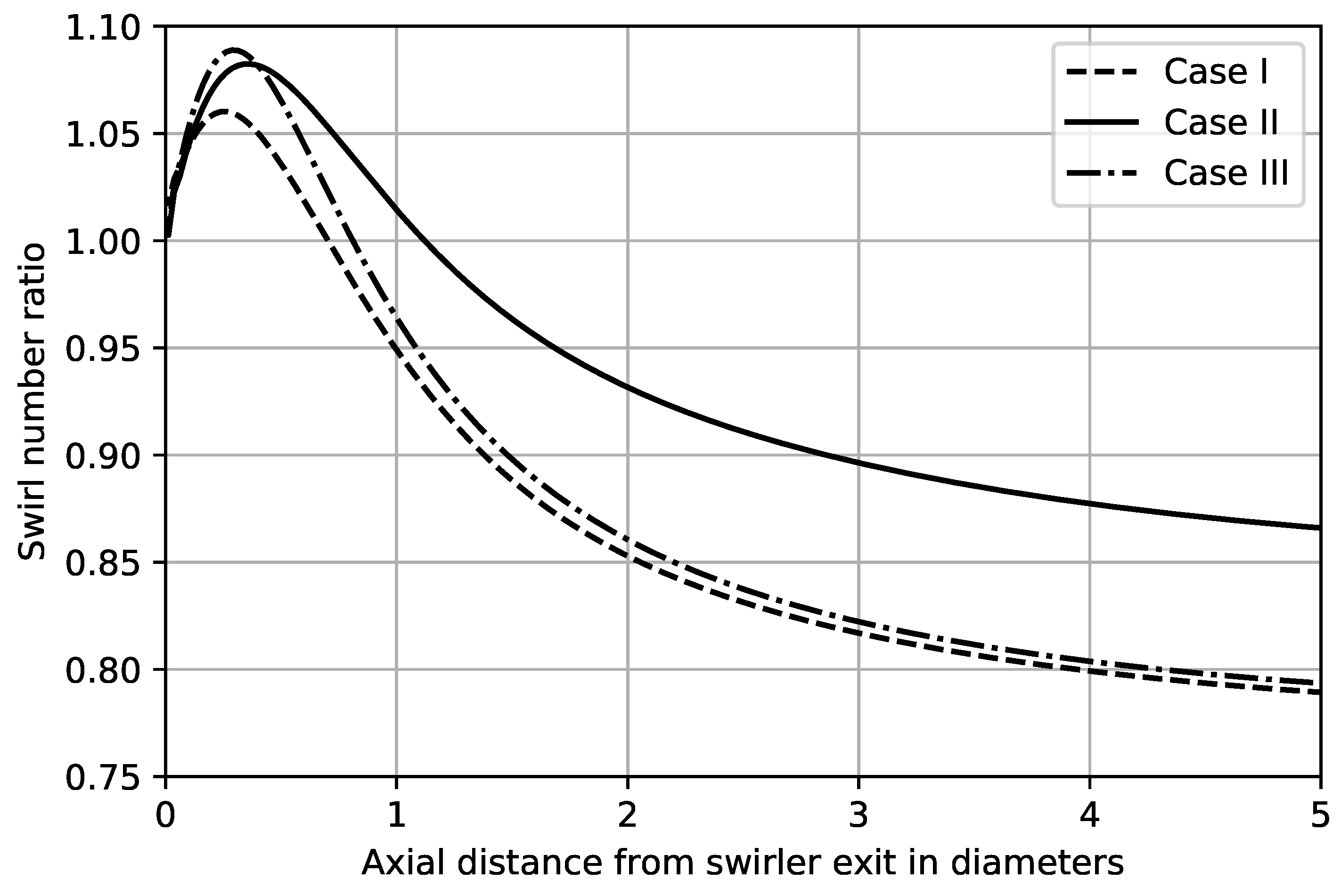
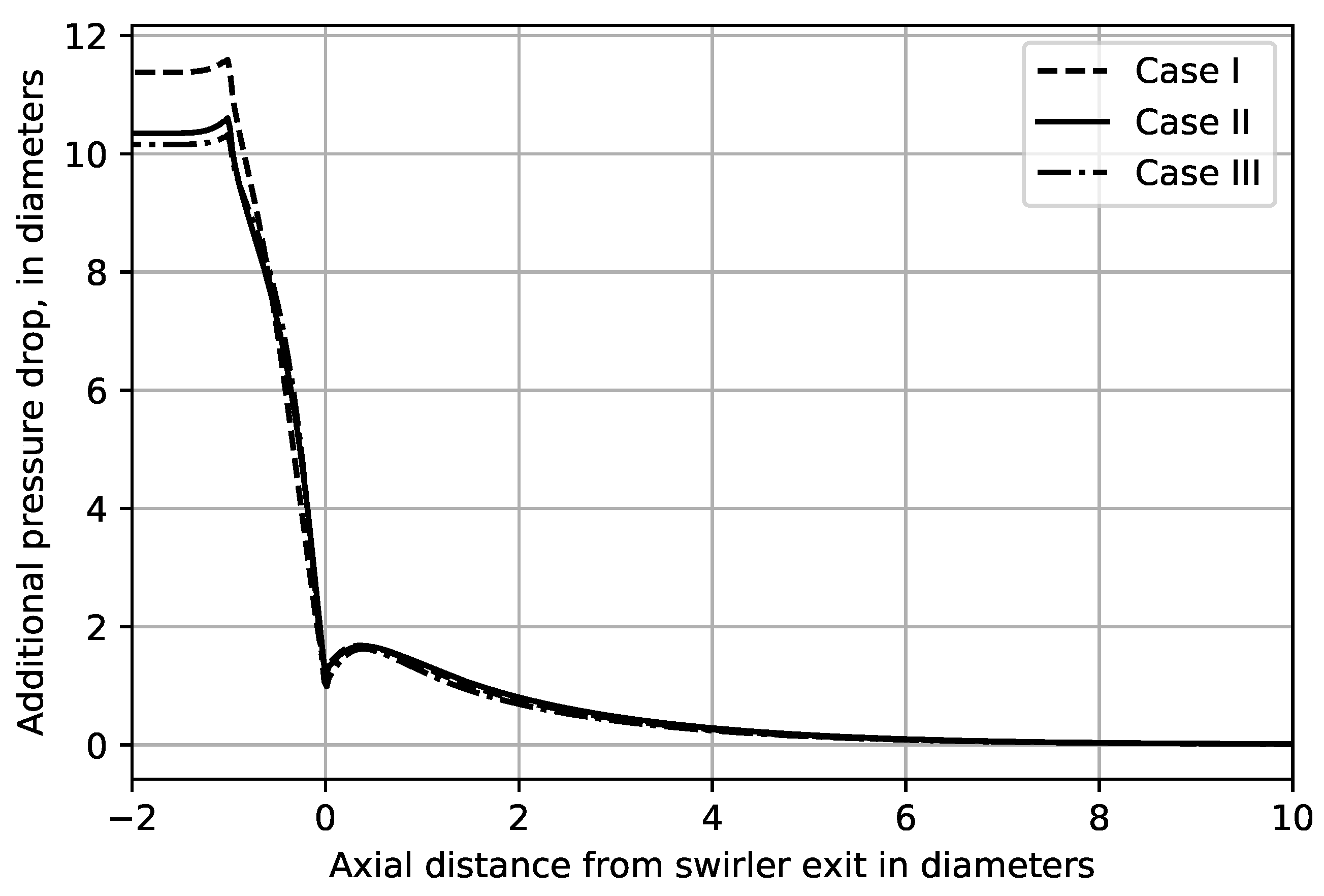
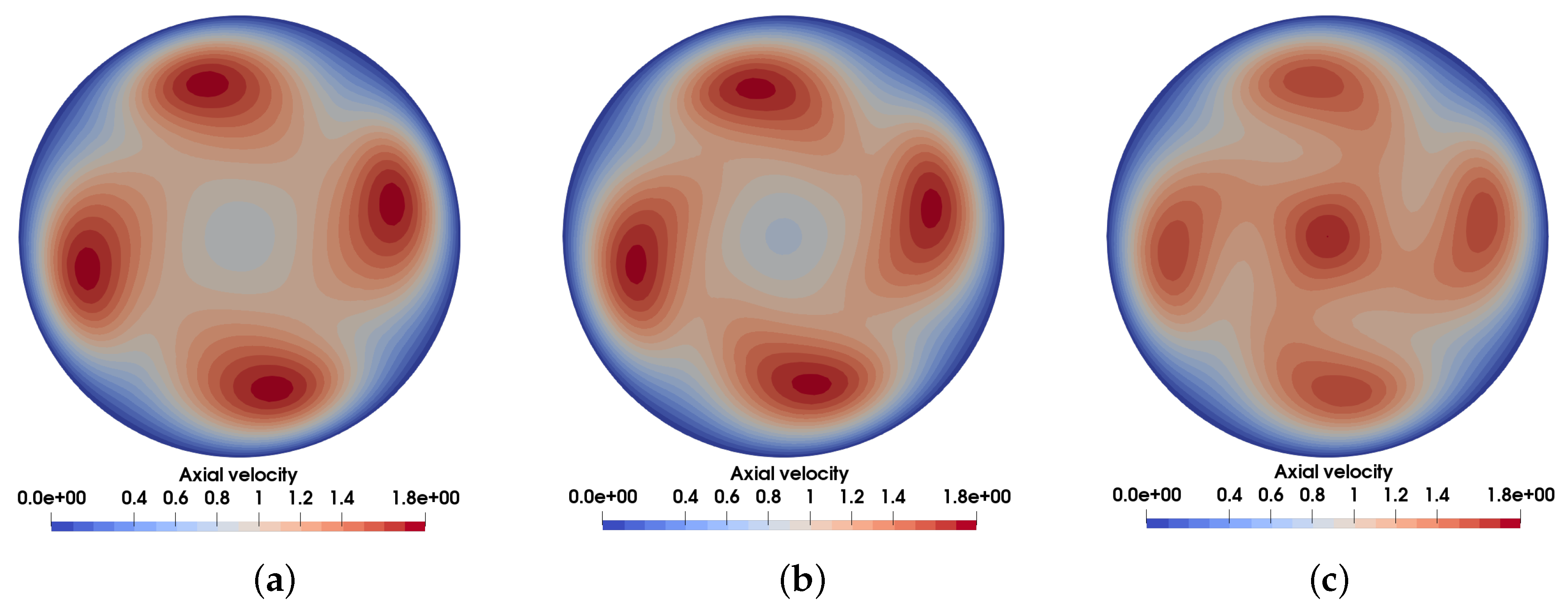
3.3. Case Comparison
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Chen, B.; Ho, K.; Abakr, Y.A.; Chan, A. Fluid dynamics and heat transfer investigations of swirling decaying flow in an annular pipe Part 2: Fluid flow. Int. J. Heat Mass Transf. 2016, 97, 1012–1028. [Google Scholar] [CrossRef]
- Tavener, S.J.; Mullin, T.; Cliffe, K.A. Novel bifurcation phenomena in a rotation annulus. J. Fluid Mech. 1991, 229, 489–497. [Google Scholar] [CrossRef]
- Duangthongsuk, W.; Wongwises, S. An experimental investigation of the heat transfer and pressure drop characteristics of a circular tube fitted with rotating turbine-type swirl generators. Exp. Therm. Fluid Sci. 2013, 45, 8–15. [Google Scholar] [CrossRef]
- Saha, S.K.; Dutta, A.; Shal, S.K. Friction and heat transfer characteristics of laminar swirl flow through a circular tube fitted with regularly spaced twisted-tape elements. Int. J. Heat Mass Transf. 2001, 44, 4211–4223. [Google Scholar] [CrossRef]
- Guo, H.F.; Xu, B.G.; Yu, C.W.; Li, S.Y. Simulationg the motion of a flexible fiber in 3D tangentially infected swirling ariflow in a straight pipe—effects of some parameters. Int. J. Heat Mass Transf. 2011, 54, 4570–4579. [Google Scholar] [CrossRef]
- Yilmaz, M.; Comakli, O.; Yapici, S.; Sara, O.N. Heat transfer and friction characteristics in decaying swirl flow generated by different radial guide vane swirl generators. Energy Convers. Manag. 2003, 44, 283–300. [Google Scholar] [CrossRef]
- Cocic, A.S.; Lecic, M.R.; Cantrak, S.M. Numerical analysis of axisymmetric turbulent swirling flow in circular pipe. Ther. Sci. 2014, 18, 493–505. [Google Scholar] [CrossRef]
- Liu, S.; Sakr, M. A comprehensive review on passive heat transfer enhancements in pipe exchangers. Renew. Sustain. Energy Rev. 2013, 19, 64–81. [Google Scholar] [CrossRef]
- Sheikholeslami, M.; Gorji-Badpy, M.; Ganji, D.D. Review of heat transfer enhancement methods: Focus on passive methods using swirl flow devices. Renew. Sustain. Energy Rev. 2015, 49, 444–469. [Google Scholar] [CrossRef]
- Guo, B.; Langrish, T.A.G.; Fletcher, D.F. CFD simulation of precession in sudden pipe expansion flows with low inlet swirl. Appl. Math. Model. 2002, 26, 1–15. [Google Scholar] [CrossRef]
- Chen, B.; Ho, K.; Abakr, Y.A.; Chan, A. Fluid dynamics and heat transfer investigations of swirling decaying flow in an annular pipe Part 1: Review, problem description, verification and validation. Int. J. Heat Mass Transf. 2016, 97, 1029–1043. [Google Scholar] [CrossRef]
- Pal, S.; Saha, S.K. Laminar fluid flow and heat transfer through a circular tube having spiral ribs and twisted tapes. Exp. Ther. Fluid Sci. 2015, 60, 173–181. [Google Scholar] [CrossRef]
- Sivashanmugam, P.; Suresh, S. Experimental studies on heat transfer and friction factor characteristics of turbulent flow through a circular tube fitted with regularly spaced helical screw-type inserts. Appl. Ther. Eng. 2007, 27, 1311–1319. [Google Scholar] [CrossRef]
- Sarac, B.A.; Bali, T. Experimental investigation of decaying swirl flow through a circular pipe for binary combination of vortex generator. Exp. Therm. Fluid Sci. 2007, 32, 158–165. [Google Scholar] [CrossRef]
- Eiamsa-ard, S.; Rattanawong, S.; Promvonge, P. Turbulent convection in round tube equipped with propeller type swirl generators. Int. Commun. Heat Mass Transf. 2009, 36, 357–364. [Google Scholar] [CrossRef]
- Rocha, A.D.; Bannwart, A.C.; Ganzarolli, M.M. Numerical and experimental study of an axially induced swirling pipe. Int. J. Heat Mass Transf. 2015, 53, 81–90. [Google Scholar] [CrossRef]
- Beaubert, F.; Pálson, H.; Lalot, S.; Choquet, I.; Bauduin, H. Fundamental mode of flreely decaying laminar swirling flows. Appl. Math. Model. 2016, 40, 6218–6233. [Google Scholar] [CrossRef]
- Thompson, J.E.; Warsi, Z.; Mastin, C.W. Numerical Grid Generation—Foundation and Applications; Elsevier North-Holland: Amsterdam, The Netherlands, 1985. [Google Scholar]
- Beaubert, F.; Pálson, H.; Lalot, S.; Choquet, I. Design of a device to induce swirling flow in pipes: A rational approach. Comput. Rendus Mec. 2015, 343, 1–12. [Google Scholar] [CrossRef]
- Venetis, J. On a Modified Form of Navier-Stokes Equations for Three-Dimensional Flows. Sci. World J. 2015, 2015, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Steenberg, W. Turbulent Pipe Flow with Swirl. Ph.D. Thesis, Eindhoven University of Technology, Eindhoven, The Netherlands, 1 January 1995. [Google Scholar]
- Sheen, H.J.; Chen, W.J.; Jeng, S.Y.; Huang, T.L. Correlation of Swirl Number for a Radial-Type Swirl Generator. Exp. Therm. Fluid Sci. 1996, 12, 444–451. [Google Scholar] [CrossRef]
- Steenberg, W.; Voskamp, J. The rate of decay of swirl in turbulent pipe flow. Flow Meas. Instrum. 1998, 9, 67–78. [Google Scholar] [CrossRef]
- Ayinde, T.F. A generalized relationship for swirl decay in laminar pipe flow. Sadhana 2010, 35, 129–137. [Google Scholar] [CrossRef]
- OpenFOAM Funding 2018. Available online: http://www.openfoam.org (accessed on 6 October 2018).
- Gunnarsson, N. Mesh Technique for Swirl Induced Flow. Master’s Thesis, University of Iceland, Reykjavík, Iceland, 2017. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case: | I | II | III |
|---|---|---|---|
| Added pressure drop [diameters] | |||
| Twist angle at swirler exit |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Helgadóttir, Á.; Lalot, S.; Beaubert, F.; Pálsson, H. Mesh Twisting Technique for Swirl Induced Laminar Flow Used to Determine a Desired Blade Shape. Appl. Sci. 2018, 8, 1865. https://doi.org/10.3390/app8101865
Helgadóttir Á, Lalot S, Beaubert F, Pálsson H. Mesh Twisting Technique for Swirl Induced Laminar Flow Used to Determine a Desired Blade Shape. Applied Sciences. 2018; 8(10):1865. https://doi.org/10.3390/app8101865
Chicago/Turabian StyleHelgadóttir, Ásdís, Sylvain Lalot, Francois Beaubert, and Halldór Pálsson. 2018. "Mesh Twisting Technique for Swirl Induced Laminar Flow Used to Determine a Desired Blade Shape" Applied Sciences 8, no. 10: 1865. https://doi.org/10.3390/app8101865
APA StyleHelgadóttir, Á., Lalot, S., Beaubert, F., & Pálsson, H. (2018). Mesh Twisting Technique for Swirl Induced Laminar Flow Used to Determine a Desired Blade Shape. Applied Sciences, 8(10), 1865. https://doi.org/10.3390/app8101865