
The State-of-the-Art on Framework of Vibration-Based Structural Damage Identification for Decision Making


Abstract
:1. Introduction
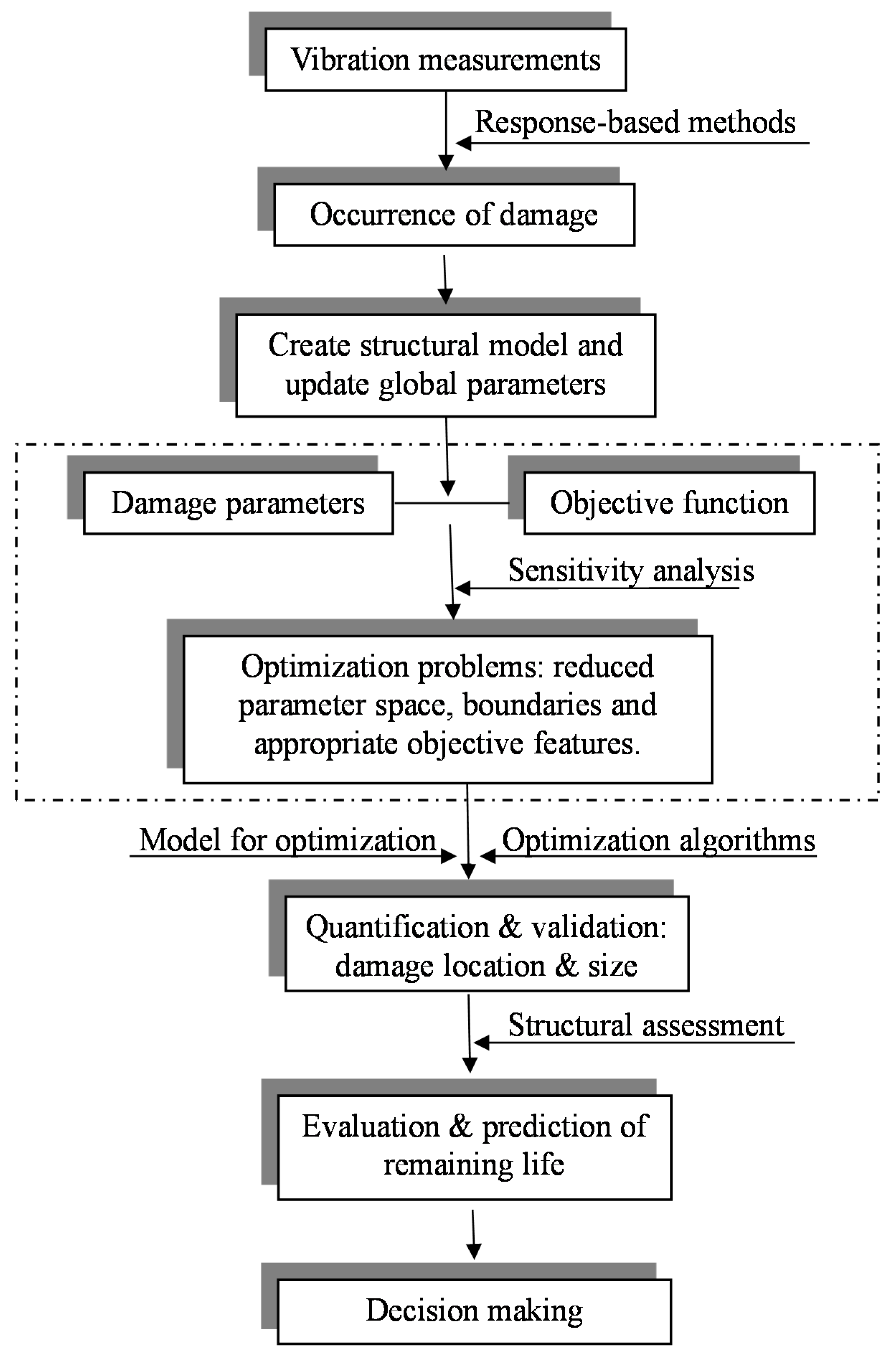
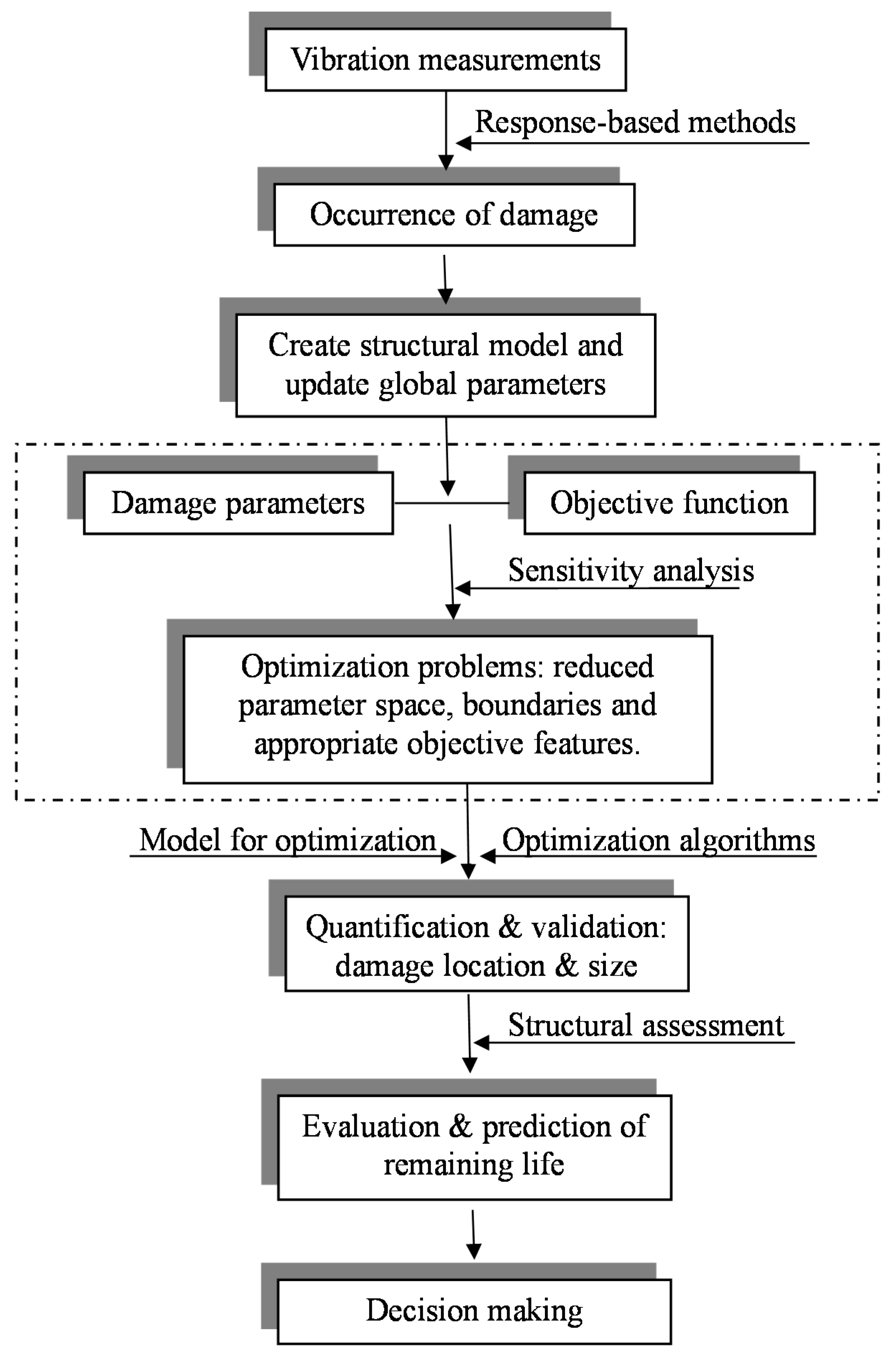
2. Framework of Vibration-Based Damage Identification
3. Detection of Damage Occurrence
3.1. Time Domain Methods
3.1.1. Output-Only Methods
3.1.2. Modern Signal Processing Methods
3.1.3. Data-Based Statistical Methods
3.1.4. Methods for Changing Environmental Conditions
3.2. Frequency Domain Methods
3.3. Modal Domain Methods
3.4. Summary of Response-Based Methods
4. Structural Models
4.1. Structural Matrix
4.2. Finite Element (FE) Model
4.3. Mapping Model and Meta-Model
5. Damage Characterization, Objective Functions, and Optimization Algorithm
5.1. Damage Characterization
5.2. Objective Features and Functions
5.3. Sensitivity Study
5.4. Optimization Algorithms
5.4.1. Gradient-Based Optimization Algorithms
5.4.2. Evolutionary Optimization Algorithms
5.4.3. Multi-Objective Optimization Algorithms
5.4.4. Guideline for Algorithm Selection
6. Prediction of Remaining Useful Life
6.1. Damage Prognosis Methodologies
6.2. Prediction Model and Model Verification
7. Decision Making
7.1. Value of Information and Uncertainty Quantification
7.2. Decision-Making Methods
7.2.1. Decision Trees
7.2.2. Bayesian Decision Theory
7.2.3. Influence Diagrams
7.2.4. Fuzzy Logic Method
7.2.5. Summary of Decision-Making Methods
8. Summary and Future work
8.1. Damage Diagnosis
- Most current damage detection techniques are based on linear theory and measurements, which can be used as a rapid estimation of the damage presence if the damage is not very small. However, if the intact structure is nonlinear by nature or a nonlinear behavior is presented due to damage accumulation, the development of nonlinear based damage indicators or detection methods could be more effective for robust damage detection.
- The effect of various factors on the vibrational measurements needs to be considered for damage detection, for an instance, the ambient conditions (e.g., temperature, traffic, etc.), the evolution of boundary conditions, and the variations in the mass and stiffness in real structures. All these variations can introduce uncertainties in both the linear and nonlinear vibrational measurements [94].
- The development of detection/monitoring techniques that can take into account the modeling errors and uncertainties is desirable to improve the correlation between experimental and numerical results.
- It is desirable to develop more effective structural models, sensitive damage indicators, and efficient optimization algorithms for the damage detection.
8.2. Damage Prognosis
- The remaining useful life (RUL) distribution is sensitive to many aspects as discussed in the paper, and thus one challenge of prognosis is to minimize the uncertainty in the estimation of RUL distribution.
- The evolution of damage such as cracking, wear, and corrosion plays a critical role in determining the structure health. It is strongly essential to study damage mechanisms and develop accurate and comprehensive failure models. The prediction model of future loadings is another important component of a successful damage prognosis.
- Since the damage prognosis is affected by many sources of uncertainties, the verification and validation of prognosis model is very essential to establish the confidence in the predictive capabilities. In particular, a significant challenge is to validate nonlinear models.
- The probabilistic reliability analysis will be necessarily applied to quantify the confidence of the estimated RUL, which assists the decision makers for the proper action.
- The future research of damage prognosis also includes the life cycle modeling considering the effect of deterioration processes, assessment of consequences associated with possible events, and modeling of preferences to cover the society performance [247].
8.3. Decision Making
- Decision making theories are of little practice to most structural managers and they often make decisions based on their experience or on common sense. It is highly desirable to evaluate the value of information and assess the impact on decision making, which promotes decision-making methods being accepted by the structural managers in practice.
- Due to the uncertainties of damage detection in civil structures, there is a risk of making an inappropriate decision. The uncertainty quantification plays a major role in decision making and requires further research.
- The output from the decision-making system should make it apparent to the decision maker, i.e., what the recommendation is and why, including information about the expected cost for the decision alternatives [248].
- It is necessary to develop methods to evaluate the decision-making performance such as detection/localization rate, false alarm rate, and the optimal trade-off.
- For the application to real-life infrastructure systems, additional work is needed to develop more efficient approaches to improve the feasibility of near-real-time applications involving large infrastructure systems [235].
Author Contributions
Conflicts of Interest
References
- Rens, K.L.; Wipf, T.J.; Klaiber, F.W. Review of nondestructive evaluation techniques of civil infrastructure. J. Perform. Constr. Facil. 1997, 11, 152–160. [Google Scholar] [CrossRef]
- McCann, D.M.; Forde, M.C. Review of NDT methods in the assessment of concrete and masonry structures. NDT & E Int. 2001, 34, 71–84. [Google Scholar]
- Carden, E.P.; Fanning, P. Vibration based condition monitoring: A review. Struct. Health Monit. 2004, 3, 355–377. [Google Scholar] [CrossRef]
- Doebling, S.W.; Farrar, C.R.; Prime, M.B. A summary review of vibration-based damage identification methods. Shock Vib. Dig. 1998, 30, 91–105. [Google Scholar] [CrossRef]
- Sohn, H.; Farrar, C.R.; Hemez, F.M.; Shunk, D.D. A Review of Structural Health Monitoring Literature: 1996–2001; Los Alamos National Laboratory: New Mexico, NM, USA, 2004. [Google Scholar]
- Yan, Y.J.; Cheng, L.; Wu, Z.Y.; Yam, L.H. Development in vibration-based structural damage detection technique. Mech. Syst. Signal Process. 2007, 21, 2198–2211. [Google Scholar] [CrossRef]
- Wang, L.; Chan, H.T. Review of vibration-based damage detection and condition assessment of bridge structures using structural health monitoring. In Proceedings of the Second Infrastructure Theme Postgraduate Conference: Rethinking Sustainable Development: Planning, Engineering, Design and Managing Urban Infrastructure, Brisbane, Australia, 26 March 2009. [Google Scholar]
- Fan, W.; Qiao, P.Z. Vibration-based damage identification methods: A review and comparative study. Struct. Health Monit. 2011, 10, 83–111. [Google Scholar] [CrossRef]
- Moughty, J.J.; Casas, J.R. Vibration Based Damage Detection Techniques for Small to Medium Span Bridges: A Review and Case Study. In Proceedings of the 8th European Workshop on Structural Health Monitoring (EWSHM 2016), Bilbao, Spain, 5–8 July 2016. [Google Scholar]
- Das, S.; Saha, P.; Patro, S.K. Vibration-based damage detection techniques used for health monitoring of structures: A review. J. Civ. Struct. Health Monit. 2016, 6, 477–507. [Google Scholar] [CrossRef]
- Farrar, C.R.; Worden, K. An introduction to structural health monitoring. Philos. Trans. R. Soc. 2007, 365, 303–315. [Google Scholar] [CrossRef] [PubMed]
- Rytter, A. Vibration Based Inspection of Civil Engineering Structure; Department of Building Technology and Structure Engineering, Aalborg University: Aalborg, Denmark, 1993. [Google Scholar]
- Fritzen, C.P.; Klinkov, M.; Kraemer, P. Vibration-based damage diagnosis and monitoring of external Loads. In New Trends in Structural Health Monitoring; Springer: Vienna, Germany, 2013; pp. 149–208. [Google Scholar]
- Dettmann, K.U.; Soeffker, D. Adaptive modeling of reliability properties for control and supervision purposes. Int. J. Appl. Math. Comput. Sci. 2011, 21, 479–486. [Google Scholar] [CrossRef]
- Silva, J.M.M.; Maia, N.M.M. Modal Analysis and Testing; NATO Science Series E: Applied Sciences; Springer: Berlin, Germany, 1999; p. 363. [Google Scholar]
- Fassois, S.D.; Sakellariou, J.S. Time series methods for fault detection and identification in vibrating structures. R. Soc. Philos. Trans. Math. Phys. Eng. Sci. 2007, 365, 411–448. [Google Scholar] [CrossRef] [PubMed]
- Ibrahim, S.R.; Mikulcik, E.C. A Method for the Direct Identification of Vibration Parameters from the Free Response. Shock Vib. Bull. 1977, 47, 183–196. [Google Scholar]
- Vandiver, J.K.; Dunwoody, A.B.; Campbell, R.B.; Cook, M.F. A nathematical basis for the random decrement vibration signature analysis technique. J. Mech. Des. 1982, 104. [Google Scholar] [CrossRef]
- Ibrahim, S.R. Double least squares approach for use in structural modal identification. AIAA J. 1986, 24, 499–503. [Google Scholar] [CrossRef]
- Juang, J.N.; Pappa, R. An eigensystem realization algorithm (ERA) for modal parameter identification. In NASA/JPL Workshop on Identification and Control of Flexible Space Structures; Jet Propulsion Lab. and California Inst. of Tech.: Pasadena, CA, USA, 1984. [Google Scholar]
- Cattarius, J.; Inman, D.J. Time domain analysis for damage detection in smart structures. Mech. Syst. Signal Process. 1997, 11, 409–423. [Google Scholar] [CrossRef]
- Peeters, B.; De Roeck, G. Stochastic System Identification for Operational Modal Analysis: A Review. J. Dyn. Syst. Meas. Control 2001, 123, 659–667. [Google Scholar] [CrossRef]
- Loh, C.H.; Hung, T.Y.; Chen, S.F.; Hsu, W.T. Damage detection in bridge structure using vibration data under random travelling vehicle Load. J. Phys. Conf. Ser. 2015, 628, 012044. [Google Scholar] [CrossRef]
- Loh, C.H.; Weng, J.H.; Liu, Y.C.; Lin, P.Y.; Huang, S.K. Structural damage diagnosis based on on-line recursive stochastic subspace identification. Smart Mater. Struct. 2011, 20, 055004. [Google Scholar] [CrossRef]
- Ruocci, G.; Quattrone, A.; De Stefano, A. Multi-domain feature selection aimed at the damage detection of historical bridges. J. Phys. Conf. Ser. 2011, 305. [Google Scholar] [CrossRef]
- Park, S.K.; Park, H.W.; Shin, S.; Lee, H.S. Detection of abrupt structural damage induced by an earthquake using a moving time window technique. Comput. Struct. 2008, 86, 1253–1265. [Google Scholar] [CrossRef]
- Todorovska, M.I.; Trifunac, M.D. Earthquake damage detection in the Imperial County Services Building II: Analysis of novelties via wavelets. Struct. Control Health Monit. 2010, 17, 895–917. [Google Scholar] [CrossRef]
- Todorovska, M.I.; Trifunac, M.D. Earthquake damage detection in the Imperial County Services Building III: Analysis of wave travel times via impulse response functions. Soil Dyn. Earthq. Eng. 2008, 28, 387–404. [Google Scholar] [CrossRef]
- Todorovska, M.I.; Rahmani, M.T. System identification of buildings by wave travel time analysis and layered shear beam models—Spatial resolution and accuracy. Struct. Control Health Monit. 2013, 20, 686–702. [Google Scholar] [CrossRef]
- Lu, C.J.; Hsu, Y.T. Vibration analysis of an inhomogeneous string for damage detection by wavelet transform. Int. J. Mech. Sci. 2002, 44, 745–754. [Google Scholar] [CrossRef]
- Yan, Y.J.; Yam, L.H. Online detection of crack damage in composite plates using embedded piezoelectric actuators/sensors and wavelet analysis. Compos. Struct. 2002, 58, 29–38. [Google Scholar] [CrossRef]
- Rajasekaran, S.; Varghese, S.P. Damage detection in beams and plates using wavelet transforms. Comput. Concr. 2005, 2, 481–498. [Google Scholar] [CrossRef]
- Law, S.S.; Li, X.Y.; Zhu, X.Q.; Chan, S.L. Structural damage detection from wavelet packet sensitivity. Eng. Struct. 2005, 27, 1339–1348. [Google Scholar] [CrossRef]
- Xu, Y.L.; Chen, J. Structural damage detection using empirical modes decomposition: Experimental investigation. J. Eng. Mech. 2004, 13, 1279–1288. [Google Scholar] [CrossRef]
- Zhou, C.; Zhang, W.D. Recurrence Plot Based Damage Detection Method by Integrating T2 Control Chart. Entropy 2015, 17, 2624–2641. [Google Scholar] [CrossRef]
- Fassois, S.D.; Sakellariou, J.S. Statistical time series methods for structural health monitoring. In Encyclopedia of Structural Health Monitoring; Boller, F.K.C.C., Fujino, Y., Eds.; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 2009; pp. 443–472. [Google Scholar]
- Nair, K.K.; Kiremidjian, A.S.; Law, K.H. Time series-based damage detection and localization algorithm with application to the ASCE benchmark structure. J. Sound Vib. 2006, 291, 349–368. [Google Scholar] [CrossRef]
- Sohn, H.; Farrar, C.R. Damage diagnosis using time series analysis of vibration signals. Smart Mater. Struct. 2001, 10, 446–451. [Google Scholar] [CrossRef]
- Sohn, H.; Farrar, C.R.; Hunter, N.F.; Worden, K. Structural health monitoring using statistical pattern recognition techniques. J. Dyn. Syst. Meas. Control Trans. ASME 2001, 23, 706–711. [Google Scholar] [CrossRef]
- Nair, K.K.; Kiremidjian, A.S. Time series-based structural damage detection algorithm using gaussian mixtures modeling. J. Dyn. Syst. Meas. Control 2007, 129, 285–293. [Google Scholar] [CrossRef]
- Lu, Y.; Gao, F. A novel time-domain auto-regressive model for structural damage diagnosis. J. Sound Vib. 2005, 283, 1031–1049. [Google Scholar] [CrossRef]
- Gao, F.; Lu, Y. A Kalman-filter based time-domain analysis for structural damage diagnosis with noisy signals. J. Sound Vib. 2006, 297, 916–930. [Google Scholar] [CrossRef]
- Foti, S.; Sabia, D. Influence of foundation scour on the dynamic response of an existing bridge. J. Bridge Eng. 2011, 16, 295–304. [Google Scholar] [CrossRef]
- Kraemer, P. Damage Diagnosis Approaches for Structural Health and Condition Monitoring of Offshore Wind Energy Plants; University of Siegen: Siegen, Germany, 2011. [Google Scholar]
- Fan, X.; Li, J.; Hao, H. Piezoelectric impedance based damage detection in truss bridges based on time frequency ARMA model. Smart Struct. Syst. 2016, 19, 501–523. [Google Scholar] [CrossRef]
- Peeters, B.; Maeck, J.; DeRoeck, G. Vibration-based damage detection in civil engineering: Excitation sources and temperature effects. Smart Mater. Struct. 2001, 10, 518–527. [Google Scholar] [CrossRef]
- Sohn, H.; Worden, K.; Farrar, C.R. Statistical damage classification under changing environmental and operational conditions. J. Intell. Mater. Syst. Struct. 2002, 13, 561–574. [Google Scholar] [CrossRef]
- Fugate, M.L.; Sohn, H.; Farrar, C.R. Vibration-based damage detection using statistical process control. Mech. Syst. Signal Process. 2001, 15, 707–721. [Google Scholar] [CrossRef]
- Ubertini, F.; Comanducci, G.; Cavalagli, N.; Pisello, A.L.; Materazzi, A.L.; Cotana, F. Environmental effects on natural frequencies of the San Pietro bell tower in Perugia, Italy, and their removal for structural performance assessment. Mech. Syst. Signal Process. 2017, 82, 307–322. [Google Scholar] [CrossRef]
- Yan, A.; Kerschen, G.; De Boe, P.; Golinval, J. Structural damage diagnosis under varying environmental conditions part I: A linear analysis. Mech. Syst. Signal Process. 2005, 19, 847–864. [Google Scholar] [CrossRef]
- Yan, A.; Kerschen, G.; De Boe, P.; Golinval, J. Structural damage diagnosis under varying environmental conditions part II: Local pca for non-linear cases. Mech. Syst. Signal Process. 2005, 19, 865–880. [Google Scholar] [CrossRef]
- Deraemaeker, A.; Reynders, E.; De Roeck, G.; Kullaa, J. Vibration-based structural health monitoring using output-only measurements under changing environment. Mech. Syst. Signal Process. 2008, 22, 34–56. [Google Scholar] [CrossRef]
- Oh, C.K.; Sohn, H. Damage diagnosis under environmental and operational variations using unsupervised support vector machine. J. Sound Vib. 2009, 325, 224–239. [Google Scholar] [CrossRef]
- Cross, E.J.; Worden, K.; Chen, Q. Cointegration: A novel approach for the removal of environmental trends in structural health monitoring data. Proc. R. Soc. Lond. A Math. Phys. Eng. Sci. 2011, 467, 2717–2732. [Google Scholar] [CrossRef]
- Bellino, A.; Fasana, A.; Garibaldi, L.; Marchesiello, S. PCA-Based detection of damage in time-varying systems. Mech. Syst. Signal Process. 2010, 24, 2250–2260. [Google Scholar] [CrossRef]
- Worden, K.; Manson, G.; Fieller, N. Damage detection using outlier analysis. J. Sound Vib. 2000, 229, 647–667. [Google Scholar] [CrossRef]
- Worden, K.; Sohn, H.; Farrar, C. Novelty detection in a changing environment: Regression and interpolation approaches. J. Sound Vib. 2002, 258, 741–761. [Google Scholar] [CrossRef]
- Magalhes, F.; Cunha, A.; Caetano, E. Vibration based structural health monitoring of an arch bridge: From automated OMA to damage detection. Mech. Syst. Signal Process. 2012, 28, 212–228. [Google Scholar] [CrossRef]
- Ubertini, F.; Comanducci, G.; Cavalagli, N. Vibration-based structural health monitoring of a historic bell-tower using output-only measurements and multivariate statistical analysis. Struct. Health Monit. 2016, 15, 438–457. [Google Scholar] [CrossRef]
- Comanducci, G.; Magalhães, F.; Ubertini, F.; Cunha, Á. On vibration-based damage detection by multivariate statistical techniques: Application to a long-span arch bridge. Struct. Health Monit. 2016, 15, 505–524. [Google Scholar] [CrossRef]
- Maia, N.M.M.; Silva, J.M.M.; Sampaio, R.P.C. Localization of damage using curvature of the frequency response functions. In Proceedings of the XV International Modal Analysis Conference, Orlando, FL, USA, 3–6 February 1997; pp. 942–946. [Google Scholar]
- Sampaio, R.P.C.; Maia, N.M.M.; Silva, J.M.M. Damage detection using the frequency response function curvature method. J. Sound Vib. 1999, 226, 1029–1042. [Google Scholar] [CrossRef]
- Rahmatalla, S.; Lee, E.T.; Eun, H.C. Damage detection by the distribution of predicted constraint forces. J. Mech. Sci. Technol. 2012, 26, 1079–1087. [Google Scholar] [CrossRef]
- Reddy, D.M.; Swarnamani, S. Application of the FRF curvature energy damage detection method to plate like structures. World J. Model. Simul. 2012, 8, 147–153. [Google Scholar]
- Liu, X.; Lieven, N.A.J.; Escamilla-Ambrosio, P.J. Frequency response function shape-based methods for structural damage localization. Mech. Syst. Signal Process. 2009, 23, 1243–1259. [Google Scholar] [CrossRef]
- Salehi, M.; Ziaei-Rad, S.; Ghayour, M.; Vaziri-Zanjani, M.A. A structural damage detection technique based on measured frequency response functions. Contemp. Eng. Sci. 2010, 3, 215–226. [Google Scholar]
- Mohan, S.C.; Maiti, D.K.; Maity, D. Structural damage assessment using FRF employing particle swarm optimization. Appl. Math. Comput. 2013, 219, 10387–10400. [Google Scholar] [CrossRef]
- Dilena, M.; Limongelli, M.P.; Morassi, A. Damage localization in bridges via the FRF interpolation method. Mech. Syst. Signal Process. 2015, 52–53, 162–180. [Google Scholar] [CrossRef]
- Lee, J.; Kim, S. Structural damage detection in the frequency domain using neural networks. J. Intell. Mater. Syst. Struct. 2007, 18, 785–792. [Google Scholar] [CrossRef]
- Kim, M.J.; Eun, H.C. Identification of damage-expected members of truss structures using frequency response function. Adv. Mech. Eng. 2017, 9, 1–10. [Google Scholar] [CrossRef]
- Maia, N.M.M.; Almeida, R.A.B.; Urgueira, A.P.V.; Sampaio, R.P.C. Damage detection and quantification using transmissibility. Mech. Syst. Signal Process. 2011, 25, 2475–2483. [Google Scholar] [CrossRef]
- Worden, K.; Manson, G.; Allman, D. Experimental validation of a structural health monitoring methodology: Part I. Novelty detection on a laboratory structure. J. Sound Vib. 2003, 259, 323–343. [Google Scholar] [CrossRef]
- Canales, G.; Mevel, L.; Basseville, M. Transmissibility based damage detection. In Proceedings of the 27th International Modal Analysis Conference (IMAC XXVII), Orlando, FL, USA, 9–12 February 2009. [Google Scholar]
- Devriendt, C.; Guillaume, P. The use of transmissibility measurements in output-only modal analysis. Mech. Syst. Signal Process. 2007, 21, 2689–2696. [Google Scholar] [CrossRef]
- Devriendt, C.; De Sitter, G.; Vanlanduit, S.; Guillaume, P. Operational modal analysis in the presence of harmonic excitations by the use of transmissibility measurements. Mech. Syst. Signal Process. 2009, 23, 621–635. [Google Scholar] [CrossRef]
- Devriendt, C.; De Sitter, G.; Guillaume, P. An operational modal analysis approach based on parametrically identified multivariable transmissibilities. Mech. Syst. Signal Process. 2010, 24, 1250–1259. [Google Scholar] [CrossRef]
- Chesne, S.; Deraemaeker, A. Damage localization using transmissibility functions: A critical review. Mech. Syst. Signal Process. 2013, 38, 569–584. [Google Scholar] [CrossRef]
- Kong, X.; Cai, C.S.; Kong, B. Damage detection based on transmissibility of a vehicle and bridge coupled system. J. Eng. Mech. 2015, 141, 04014102. [Google Scholar] [CrossRef]
- Zhou, Y.L.; Maia, N.M.M.; Wahab, M.A. Damage detection using transmissibility compressed by principal component analysis enhanced with distance measure. J. Vib. Control 2016. [Google Scholar] [CrossRef]
- Brincker, R.; Zhang, L.M.; Andersen, P. Modal identification of output-only system using frequency domain decomposition. Smart Mater. Struct. 2001, 10, 441–445. [Google Scholar] [CrossRef]
- Yang, Z.B.; Chen, X.F.; Yu, J.; Liu, R.; Liu, Z.H.; He, Z. A damage identification approach for plate structures based on frequency measurements. Nondestruct. Test. Eval. 2013, 28, 321–341. [Google Scholar] [CrossRef]
- Yang, Z.; Chen, X.; Radzienski, M.; Kudela, P.; Ostachowicz, W. A Fourier spectrum-based strain energy damage detection method for beam-like structures in noisy conditions. Sci. China Technol. Sci. 2017. [Google Scholar] [CrossRef]
- Cao, S.C.; Ouyang, H.J. Robust structural damage detection and localization based on joint approximate diagonalization technique in frequency domain. Smart Mater. Struct. 2016, 26, 1–17. [Google Scholar] [CrossRef]
- Cawley, P.; Adams, R.D. The location of defects in structures from measurements of natural frequencies. J. Strain Anal. 1979, 14, 49–57. [Google Scholar] [CrossRef]
- West, W.M. Illustration of the use of modal assurance criterion to detect structural changes in an orbiter test specimen. In Proceedings of the Air Force Conference on Aircraft Structural Integrity, NASA Johnson Space Center, Houston, TX, USA, 3–6 February 1986. [Google Scholar]
- Lieven, N.A.J.; Ewins, D.J. Spatial correlation of mode shapes, the Coordinate Modal Assurance Criterion (COMAC). In Proceedings of the Sixth International Modal Analysis Conference, Kissimmee, FL, USA, 1–4 February 1988. [Google Scholar]
- Lu, Q.; Ren, G.; Zhao, Y. Multiple damage location with flexibility curvature and relative frequency change for beam structures. J. Sound Vib. 2002, 253, 1101–1114. [Google Scholar] [CrossRef]
- Guan, H.; Karrbhari, V.M. Improved damage detection method based on element modal strain damage index using sparse measurement. J. Sound Vib. 2008, 309, 465–494. [Google Scholar] [CrossRef]
- Salehi, M.; Ziaei-Rad, S.; Ghayour, M. A structural damage detection technique based on modal strain energy. In Proceedings of the 17th Annual (International) Conference on Mechanical Engineering, ISME2009, Tehran, Iran, 19–21 May 2009. [Google Scholar]
- Pandy, A.K.; Biswas, M.; Samman, M.M. Damage detection from changes in curvature mode shapes. J. Sound Vib. 1991, 145, 321–332. [Google Scholar] [CrossRef]
- Yam, L.H.; Leung, T.P.; Li, D.B.; Xue, K.Z. Theoretical and experimental study of modal strain analysis. J. Sound Vib. 1996, 191, 251–260. [Google Scholar] [CrossRef]
- Salehi, M.; Ziaei Rad, S.; Ghayour, M.; Vaziry, M.A. A non-model-based damage detection technique using dynamically measured flexibility matrix. IJST Trans. Mech. Eng. 2011, 35, 1–13. [Google Scholar]
- Zhang, Z.; Aktan, A. The damage indices for constructed facilities. In Proceedings of the 13th International Modal Analysis Conference, Nashville, TN, USA, 13–16 February 1995. [Google Scholar]
- Sinou, J.J. A review of damage detection and health monitoring of mechanical systems from changes in the measurement of linear and non-linear vibrations. In Mechanical Vibrations: Measurement, Effects and Control; Sapri, R.C., Ed.; Nova Science Publishers, Inc.: New York, NY, USA, 2009; pp. 643–702. [Google Scholar]
- Carneiro, S.H.S. Model-Based Vibration Diagnostic of Cracked Beam in Time Domain. Ph.D. Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 2000. [Google Scholar]
- Whalen, T.M. The behavior of higher order mode shape derivatives in damaged, beam-like structures. J. Sound Vib. 2008, 309, 426–464. [Google Scholar] [CrossRef]
- Gauthier, J.F.; Whalen, T.M.; Liu, J. Experimental validation of the higher-order derivative discontinuity method for damage identification. Struct. Control Health Monit. 2008, 15, 143–161. [Google Scholar] [CrossRef]
- Cao, M.S.; Radzieński, M.; Xu, W.; Ostachowicz, W. Identification of multiple damage in beams based on robust curvature mode shapes. Mech. Syst. Signal Process. 2014, 46, 468–480. [Google Scholar] [CrossRef]
- Xu, W.; Cao, M.; Ostachowicz, W.; Radzieńnski, M.; Xia, N. Two-dimensional curvature mode shape method based on wavelets and Teager energy for damage detection in plates. J. Sound Vib. 2015, 347, 266–278. [Google Scholar] [CrossRef]
- Moreno-García, P.; dos Santos, J.A.; Lopes, H. A new technique to optimize the use of mode shape derivatives to localize damage in laminated composite plates. Compos. Struct. 2013, 108, 548–554. [Google Scholar] [CrossRef]
- Ratcliffe, C.P. Damage detection using a modified laplacian operator on mode shape data. J. Sound Vib. 1997, 204, 505–517. [Google Scholar] [CrossRef]
- Chandrashekhar, M.; Ganguli, R. Damage assessment of structures with uncertainty by using mode-shape curvatures and fuzzy logic. J. Sound Vib. 2009, 326, 939–957. [Google Scholar] [CrossRef]
- Sazonov, E.; Klinkhachorn, P. Optimal spatial sampling interval for damage detection by curvature or strain energy mode shapes. J. Sound Vib. 2005, 285, 783–801. [Google Scholar] [CrossRef]
- Yoon, M.K.; Heider, D.; Gillespie, J.W., Jr.; Ratcliffe, C.P.; Crane, R.M. Local damage detection using the two-dimensional gapped smoothing method. J. Sound Vib. 2005, 279, 119–139. [Google Scholar] [CrossRef]
- Li, H.; Huang, Y.; Ou, J.; Bao, Y. Fractal dimension-based damage detection method for beams with a uniform cross-section. Comput. Aided Civ. Infrastruct. Eng. 2011, 26, 190–206. [Google Scholar] [CrossRef]
- Cao, M.; Cheng, L.; Su, Z.; Xu, H. A multi-scale pseudo force model in wavelet domain for identification of damage in structural components. Mech. Syst. Signal Process. 2012, 28, 638–659. [Google Scholar] [CrossRef]
- Katunin, A. Nondestructive Damage Assessment of Composite Structures Based on Wavelet Analysis of Modal Curvatures: State-of-the-Art Review and Description of Wavelet-Based Damage Assessment Benchmark. Shock Vib. Dig. 2015, 2015, 735219. [Google Scholar] [CrossRef]
- Friswell, M.I.; Inman, D.J.; Pilkey, D.F. Direct updating of damping and stiffness matrices. AIAA J. 1997, 36, 491–493. [Google Scholar] [CrossRef]
- Yang, Y.B.; Chen, Y.J. A new direct method for updating structural models based on measured modal data. Eng. Struct. 2009, 31, 32–42. [Google Scholar] [CrossRef]
- Friswell, M.I.; Mottershead, J.E. Finite element model updating in Structural Dynamics; Kluwer Academic: Norwell, MA, USA, 1995. [Google Scholar]
- Farhat, C.; Hemez, F.M. Updatting finite element dynamic models using an element-by-element sensitivity methodology. AIAA J. 1993, 31, 1702–1711. [Google Scholar] [CrossRef]
- Kim, G.H.; Park, Y.S. An improved updating parameter selection method and finite element model update using multiobjective optimization technique. Mech. Syst. Signal Process. 2004, 18, 59–78. [Google Scholar] [CrossRef]
- Mottershead, J.E.; Friswell, M.I. Model updating in structural dynamics: A survey. J. Sound Vib. 1993, 167, 347–375. [Google Scholar] [CrossRef]
- Marwala, T. Finite Element Model Updating Using Computational Intelligence Techniques: Applications to Structural Dynamics; Springer: Heidelberg, Germany, 2010. [Google Scholar]
- Marwala, T.; Sibisi, S. Finite Element Updating Using Bayesian Framework and Modal Properties. J. Aircr. 2005, 42, 275–278. [Google Scholar] [CrossRef]
- Wu, J.E.; Dai, H. Regularized Lanczos Method for Model Updating. J. Vib. Shock 2008, 27, 65–69. [Google Scholar]
- Pérez, C.G.; González, J.Y. Identification of structural damage in a vehicular bridge using artificial neural networks. Struct. Health Monit. 2011, 10, 33–48. [Google Scholar] [CrossRef]
- Menon, A. Structural Optimization Using ANSYS and Regulated Multiquadric Response Surface Model; University of Texas at Arlington: Arlington, TX, USA, 2005. [Google Scholar]
- Mack, Y.; Goel, T.; Shyy, W.; Haftka, R. Surrogate model-based optimization framework: A case study in aerospace design. Stud. Comput. Intell. 2007, 51, 323–342. [Google Scholar]
- Kamali, M. Calibration of Hydrologic Models Using Distributed Surrogate Model. Ph.D. Thesis, University of Waterloo, Waterloo, ON, Canada, 2009. [Google Scholar]
- Fang, S.E.; Perera, R. A response surface methodology based damage identification technique. Smart Mater. Struct. 2009, 18, 065009. [Google Scholar] [CrossRef]
- Deng, L.; Cai, C.S. Bridge model updating using response surface method and genetic algorithm. J. Bridge Eng. 2010, 15, 553–564. [Google Scholar] [CrossRef]
- Ren, W.X.; Chen, H.B. Finite element model updating in structural dynamics by using the response surface method. Eng. Struct. 2010, 32, 2455–2465. [Google Scholar] [CrossRef]
- Ren, W.X.; Fang, S.E.; Deng, M.Y. Response surface–based finite element model updating using structural static responses. J. Eng. Mech. 2011, 137, 248–257. [Google Scholar] [CrossRef]
- Mukhopadhyay, T.; Dey, T.K.; Chowdhury, R.; Chakrabarti, A. Structural damage identification using response surface-based multi-objective optimization: A comparative study. Arabian J. Sci. Eng. 2015, 40, 1027–1044. [Google Scholar] [CrossRef]
- Gao, H.Y.; Guo, X.L.; Hu, X.F. Crack identification based on Kriging surrogate model. Struct. Eng. Mech. 2012, 41, 25–41. [Google Scholar] [CrossRef]
- Ghasemi, M.R.; Ghiasi, R.; Varaee, H. Probability-based damage detection of structures using Kriging surrogates and enhanced ideal gas molecular movement algorithm. Int. J. Mech. Aerosp. Ind. Mechatron. Manuf. Eng. 2017, 11, 628–636. [Google Scholar]
- Krishna, V. Structural Optimization Using ANSYS Classic and Radial Basis Function Based Response Surface Model. Master’s Thesis, Mechanical Engineering, University of Texas at Arlington, Arlington, TX, USA, 2009. [Google Scholar]
- Torkzadeh, P.; Fathnejat, H.; Ghiasi, R. Damage detection of plate-like structures using intelligent surrogate model. Smart Struct. Syst. 2016, 18, 1233–1250. [Google Scholar] [CrossRef]
- Li, W.; Padula, S. Approximation methods for conceptual design of complex systems. In Approximation Theory XI; Gatlinburg, N.M., Chui, C., Schumaker, L., Eds.; Nashboro Press: Brentwood, TN, USA, 2005. [Google Scholar]
- Queipo, N.V.; Haftka, R.T.; Shyy, W.; Goel, T.; Vaidyanathan, R.; Tucker, P.K. Surrogate-based analysis and optimization. Prog. Aerosp. Sci. 2005, 41, 1–28. [Google Scholar] [CrossRef]
- Chen, V.C.P.; Tsui, K.L.; Barton, R.R.; Meckesheimer, M. A review on design, modeling and applications of computer experiments. IIE Trans. 2006, 38, 273–291. [Google Scholar] [CrossRef]
- Goel, T. Multiple Surrogates and Error Modeling in Optimization of Liquid Rocket Propulsion Components; University of Florida: Gainesville, FL, USA, 2007. [Google Scholar]
- Kong, X.; Wu, D.J.; Cai, C.S.; Liu, Y.Q. New strategy of substructure method to model long-span hybrid cable-stayed bridges under vehicle-induced vibration. Eng. Struct. 2012, 34, 421–435. [Google Scholar] [CrossRef]
- Sazonov, E.S.; Klinkhachorn, P.; Halabe, U.B.; GangaRao, H.V.S. Non-baseline detection of small damages from changes in strain energy mode shapes. Nondestruct. Test. Eval. 2002, 18, 91–107. [Google Scholar] [CrossRef]
- Sohn, H.; Park, H.W.; Law, K.H.; Farrar, C.R. Combination of a time reversal process and a consecutive outlier analysis for baseline-free damage diagnosis. J. Intell. Mater. Syst. Struct. 2007, 18, 335–346. [Google Scholar] [CrossRef]
- Kim, S.B.; Sohn, H. Instantaneous reference-free crack detection based on polarization characteristics of piezoelectric materials. Smart Mater. Struct. 2007, 16, 2375. [Google Scholar] [CrossRef]
- Zhong, S.; Oyadiji, S.O. Crack detection in simply supported beams without baseline modal parameters by stationary wavelet transform. Mech. Syst. Signal Process. 2007, 21, 1853–1884. [Google Scholar] [CrossRef]
- Zhong, S.; Oyadiji, S.O. Detection of cracks in simply-supported beams by continuous wavelet transform of reconstructed modal data. Comput. Struct. 2011, 89, 127–148. [Google Scholar] [CrossRef]
- Rucevskis, S.; Janeliukstis, R.; Akishin, P.; Chate, A. Mode shape-based damage detection in plate structure without baseline data. Struct. Control Health Monit. 2016, 23, 1180–1193. [Google Scholar] [CrossRef]
- Ovanesova, A.V.; Suárez, L.E. Applications of wavelet transforms to damage detection in frame structures. Eng. Struct. 2004, 26, 39–49. [Google Scholar] [CrossRef]
- Rucha, M. Damage detection in beams using wavelet transform on higher vibration modes. J. Theor. Appl. Mech. 2011, 49, 399–417. [Google Scholar]
- Perera, R.; Fang, S.E.; Ruiz, A. Application of particle swarm optimization and genetic algorithms to multi objective damage identification inverse problems with modelling errors. Mech. Syst. Signal Process. 2010, 45, 723–734. [Google Scholar]
- Ren, W.X.; De Roeck, G. Structural damage identification using modal data I: Simulation verification. J. Struct. Eng. 2002, 128, 87–95. [Google Scholar] [CrossRef]
- Teughels, A.; Maeck, J.; De Roeck, G. Damage assessment by FE model updating using damage functions. Comput. Struct. 2002, 80, 1869–1879. [Google Scholar] [CrossRef]
- Zapico, J.L.; Gonzalez, M.P.; Friswell, M.I.; Taylor, C.A.; Crewe, A.J. Finite element model updating of small scale bridge. J. Sound Vib. 2003, 268, 993–1012. [Google Scholar] [CrossRef]
- Jaishi, B.; Ren, W.X. Finite element model updating based on eigenvalue and strain energy residuals using multiobjective optimization technique. Mech. Syst. Signal Process. 2007, 21, 2295–2317. [Google Scholar] [CrossRef]
- Teughels, A.; De Roeck, G. Damage detection and parameter identification by finite element model updating. Arch. Comput. Methods Eng. 2005, 12, 123–164. [Google Scholar] [CrossRef]
- Jaishi, B.; Ren, W.X. Structural finite element model updating using ambient vibration test results. J. Struct. Eng. 2005, 131, 617–628. [Google Scholar] [CrossRef]
- Banks, H.T.; Inman, D.J.; Leo, D.J.; Wang, Y. An experimentally validated damage detection theory in smart structures. J. Sound Vib. 1996, 191, 859–880. [Google Scholar] [CrossRef]
- Banks, H.T.; Emeric, P.R. Detection of non-symmetrical damage in smart plate-like structures. J. Intell. Mater. Syst. Struct. 1998, 9, 818–828. [Google Scholar] [CrossRef]
- Masri, S.; Nakamura, M.; Chassiakos, A.; Caughey, T. Neural network approach to detection of changes in structural parameters. J. Eng. Mech. 1996, 122, 350–360. [Google Scholar] [CrossRef]
- Bu, J.Q.; Law, S.S.; Zhu, X.Q. Innovative bridge condition assessment from dynamic response of a passing vehicle. J. Eng. Mech. 2006, 12, 1372–1379. [Google Scholar] [CrossRef]
- Lu, Z.R.; Liu, J.K. Identification of both structural damages in bridge deck and vehicular parameters using measured dynamic responses. Comput. Struct. 2011, 89, 1397–1405. [Google Scholar] [CrossRef]
- Lew, J.S. Using transfer function parameter changes for damage detection of structures. AIAA J. 1995, 33, 2189–2193. [Google Scholar] [CrossRef]
- Wang, Z.; Lin, R.M.; Lim, M.K. Structural damage detection using measured FRF data. Comput. Methods Appl. Mech. Eng. 1997, 147, 187–197. [Google Scholar] [CrossRef]
- Fritzen, C.P.; Jennewein, D.; Kiefer, T. Damage detection based on vibration measurements and inaccurate models. In Proceedings of the ASME Design Engineering Technical Conference, Sacramento, CA, USA, 14–17 September 1997. [Google Scholar]
- Esfandiari, A.; Bakhtiari-Nejad, F.; Sanayei, M.; Rahai, A. Structural finite element model updating using transfer function data. Comput. Struct. 2010, 88, 54–64. [Google Scholar] [CrossRef]
- Mares, C.; Ruotolo, R.; Surace, C. Using transmissibility data to assess structural damage. In Proceedings of the 3rd International Conference on Damage Assessment of Structures (DAMAS 99), Dublin, Ireland, 28–30 June 1999. [Google Scholar]
- Sampaio, R.P.C.; Henrique, E.N.I.D.; Mafia, N.M.M.; Silva, J.M.M. More insight into some frequency- response-function methods for damage detection. In Proceedings of the 18th International Modal Analysis Conference, San Antonio, TX, USA, 7–10 February 2000. [Google Scholar]
- Srinivas, V.; Ramanjaneyulu, K.; Jeyasehar, C.A. Multi-stage approach for structural damage identification using modal strain energy and evolutionary optimization techniques. Struct. Health Monit. 2010, 10, 219–230. [Google Scholar] [CrossRef]
- Unger, J.F.; Teughels, A.; De Roeck, G. Damage detection of a prestressed concrete beam using modal strains. J. Struct. Eng. 2005, 131, 1456–1463. [Google Scholar] [CrossRef]
- Keye, S.; Rose, M.; Sachau, D. Localizing delamination damages in aircraft panels from modal damping parameters. In Proceedings of the 19th International Modal Analysis Conference (IMAC XIX), Kissimmee, FL, USA, 5–8 February 2001. [Google Scholar]
- Yam, L.H.; Wei, Z.; Cheng, L. Nondestructive detection of internal delamination by vibration-based method for composite plates. J. Compos. Mater. 2004, 38, 2183–2198. [Google Scholar] [CrossRef]
- Wahab, M.M.A.; De Roeck, G. Damage detection in bridges using modal curvatures: Application to a real damage scenario. J. Sound Vib. 1999, 226, 217–235. [Google Scholar] [CrossRef]
- Wahab, M.M.A. Effect of modal curvatures on damage using model updating. Mech. Syst. Signal Process. 2001, 15, 439–445. [Google Scholar] [CrossRef]
- Cacuci, D.G. Sensitivity theory for nonlinear systems I. Nonlinear functional analysis approach. J. Math. Phys. 1981, 22, 2794–2802. [Google Scholar] [CrossRef]
- Saltelli, A.; Chan, K.; Scott, E.M. Sensitivity analysis. In Wiley Series in Probability and Statistics; Wiley: Hoboken, NJ, USA, 2000. [Google Scholar]
- Hamby, D.M. A review of techniques for parameter sensitivity analysis of environmental models. Environ. Monit. Assess. 1994, 32, 135–154. [Google Scholar] [CrossRef] [PubMed]
- Iooss, B.; Lemaître, P. A Review on Global Sensitivity Analysis Methods. In Uncertainty Management in Simulation—Optimization of Complex Systems; Operations Research/Computer Science Interfaces Series; Springer: Berlin, Germany, 2015; pp. 101–122. [Google Scholar]
- Saltelli, A.; Annoni, P. How to avoid a perfunctory sensitivity analysis. Environ. Model. Softw. 2010, 25, 1508–1517. [Google Scholar] [CrossRef]
- Cundy, A.L. Use of Response Surface Metamodels in Damage Identification of Dynamic Structures. Master’s Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 2003. [Google Scholar]
- Shahsavani, D.; Grimvall, A. Variance-based sensitivity analysis of model outputs using surrogate models. Environ. Model. Softw. 2011, 26, 723–730. [Google Scholar] [CrossRef]
- Will, J. Robust design optimization in forming process simulation. In Proceedings of the ANSYS Conference & 25th CADFEM Users’ Meeting, Dresden, Germany, 21–23 November 2007. [Google Scholar]
- Venter, G. Review of optimization techniques. In Encyclopedia of Aerospace Engineering; Blockley, R., Shyy, W., Eds.; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2010. [Google Scholar]
- Schittkowski, K.; Zillober, C.; Zotemantel, R. Numerical comparison of nonlinear programming algorithms for structural optimization. Struct. Optim. 1994, 7, 1–19. [Google Scholar] [CrossRef]
- Schittkowski, K. NLQPL: A Fortran-subroutine solving constrained nonlinear programming problems. Ann. Oper. Res. 1985, 5, 485–500. [Google Scholar] [CrossRef]
- Boggs, P.T.; Tolle, J.W. Sequential quadratic programming. Acta Numer. 1995, 4, 1–51. [Google Scholar] [CrossRef]
- Gould, N.I.M.; Toint, P.L. SQP methods for large-scale nonlinear programming. In Proceedings of the 19th IFIP TC7 Conference on System Modelling and Optimization, Cambridge, UK, 12–16 July 1999; pp. 149–178. [Google Scholar]
- Fletcher, R. Practical Methods of Optimization, 2nd ed.; John Wiley and Sons: Hoboken, NJ, USA, 2000. [Google Scholar]
- Holland, J.H. Adaptation in Natural and Artificial Systems; University of Michigan Press: Ann Arbor, MI, USA, 1975. [Google Scholar]
- Kennedy, J.; Eberhart, R.C. Particle swarm optimization. In Proceedings of the 1995 IEEE International Conference on Neural Networks, Perth, Australia, 27 November–2 December 1995. [Google Scholar]
- Fogel, L.J.; Owens, A.J.; Walsh, M.J. Artificial Intelligence through Simulated Evolution; John Wiley & Sons Inc.: Hoboken, NJ, USA, 1966. [Google Scholar]
- Koza, J.R. Genetic Programming: On the Programming of Computers by Means of Natural Selection; MIT Press: Cambridge, MA, USA, 1992. [Google Scholar]
- Storn, R.; Price, K. Differential evolution—A simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Kirkpatrick, S.; Gelatt, C.D.; Vecchi, M.P. Optimization by simulated annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef] [PubMed]
- Glover, F. Heuristics for integer programming using surrogate constraints. Decis. Sci. 1977, 8, 156–166. [Google Scholar] [CrossRef]
- Dorigo, M.; Maniezzo, V.; Colorni, A. Ant system: Optimization by a colony of cooperating agents. IEEE Trans. Syst. Man Cybern. B 1996, 26, 29–41. [Google Scholar] [CrossRef] [PubMed]
- Geem, Z.W.; Kim, J.H.; Loganathan, G.V. A new heuristic optimization algorithm: Harmony search. Simulation 2001, 76, 60–68. [Google Scholar] [CrossRef]
- Fister, I., Jr.; Yang, X.S.; Fister, I.; Brest, J.; Fister, D. A brief review of nature-inspired algorithms for optimization. Elektrotehniski Vestnik 2013, 80, 1–7. [Google Scholar]
- Coello, C.A.; Van Veldhuizen, D.A.; Lamont, G.B. Evolutionary Algorithms for Solving Multi-Objective Problems; Kluwer Academic Publishers: New York, NY, USA, 2002. [Google Scholar]
- Ishibuchi, H.; Tsukamoto, N.; Nojima, Y. Evolutionary many-objective optimization: A short review. In Proceedings of the 2008 IEEE Congress on Evolutionary Computation (CEC 2008), Hong Kong, China, 1–6 June 2008; pp. 2419–2426. [Google Scholar]
- Perera, R.; Ruiz, A.; Manzano, C. An evolutionary multiobjective framework for structural damage localization and quantification. Eng. Struct. 2007, 29, 2540–2550. [Google Scholar] [CrossRef]
- Perera, R.; Ruiz, A. A multistage FE updating procedure for damage identification in large-scale structures based on multiobjective evolutionary optimization. Mech. Syst. Signal Process. 2008, 22, 970–991. [Google Scholar] [CrossRef]
- Cha, Y.J.; Buyukozturk, O. Structural damage detection using modal strain energy and hybrid multiobjective optimization. Comput. Aided Civ. Infrastruct. Eng. 2015, 30, 347–358. [Google Scholar] [CrossRef]
- Farrar, C.R.; Lieven, A.N. Damage prognosis: The future of structural health monitoring. Philos. Trans. R. Soc. 2007, 365, 623–632. [Google Scholar] [CrossRef] [PubMed]
- Jardine, A.K.S.; Lin, D.; Banjevic, D. A review on machinery diagnostics and prognostics implementing condition-based maintenance. Mech. Syst. Signal Process. 2006, 20, 1483–1510. [Google Scholar] [CrossRef]
- Heng, A.; Zhang, S.; Tan, C.C.; Mathew, J. Rotating machinery prognostics: State of the art, challenges and opportunities. Mech. Syst. Signal Process. 2009, 23, 724–739. [Google Scholar] [CrossRef]
- Si, X.S.; Wang, W.; Hu, C.H.; Zhou, D.H. Remaining useful life estimation—A review on the statistical data driven approaches. Eur. J. Oper. Res. 2011, 213, 1–14. [Google Scholar] [CrossRef]
- Sikorska, J.Z.; Hodkiewicz, M.; Ma, L. Prognostic modelling options for remaining useful life estimation by industry. Mech. Syst. Signal Process. 2011, 25, 1803–1836. [Google Scholar] [CrossRef]
- Ahmadzadeh, F.; Lundberg, J. Remaining useful life estimation: Review. Int. J. Syst. Assur. Eng. Manag. 2014, 5, 461–474. [Google Scholar] [CrossRef]
- Tsui, K.L.; Chen, N.; Zhou, Q.; Hai, Y.Z.; Wang, W.B. Prognostics and Health Management: A Review on Data Driven Approaches. Math. Probl. Eng. 2015, 2015, 793161. [Google Scholar] [CrossRef]
- Bartram, G.W. System Health Diagnosis and Prognosis Using Dynamic Bayesian Networks; Vanderbilt University: Nashville, TN, USA, 2013. [Google Scholar]
- Bartram, G.; Mahadevan, S. Probabilistic Prognosis with Dynamic Bayesian Networks. Int. J. Progn. Health Manag. 2015. Available online: http://www.phmsociety.org/sites/phmsociety.org/files/phm_submission/2014/ijphm_15_002.pdf (accessed on 11 May 2017).
- Si, X.S.; Zhang, Z.X.; Hu, C.H. Data-Driven Remaining Useful Life Prognosis Techniques: Stochastic Models, Methods and Applications; Springer Series in Reliability Engineering; National Defense Industry Press/Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Kacprzynski, G.J.; Sarlashkar, A.; Roemer, M.J.; Hess, A.; Hardman, B. Predicting remaining life by fusing the physics of failure modeling with diagnostics. J. Miner. Met. Mater. Soc. (JOM) 2004, 56, 29–35. [Google Scholar] [CrossRef]
- Lorton, A.; Fouladirad, M.; Grall, A. A methodology for probabilistic model-based prognosis. Eur. J. Oper. Res. 2013, 225, 443–454. [Google Scholar] [CrossRef]
- Liao, L.X.; Köttig, F. Review of hybrid prognostics approaches for remaining useful life prediction of engineered systems, and an application to battery life prediction. IEEE Trans. Reliab. 2014, 63, 191–207. [Google Scholar] [CrossRef]
- Zhong, R.; Zong, Z.; Niu, J.; Yuan, S. A Damage Prognosis Method of Girder Structures Based on Wavelet Neural Networks. Math. Probl. Eng. 2014, 2014, 130274. [Google Scholar] [CrossRef]
- Saxena, A.; Celaya, J.; Saha, B.; Saha, S.; Goebel, K. Metrics for Offline Evaluation of Prognostic Performance. Int. J. Progn. Health Manag. 2010, 1, 4–23. [Google Scholar]
- Liu, S.; Sun, B. A Novel method for online prognostics performance evaluation. In Proceedings of the IEEE Conference on Prognostics and System Health Management (PHM), Beijing, China, 23–25 May 2012. [Google Scholar]
- Hemez, F.M.; Doebling, S.W.; Anderson, M.C. A brief tutorial on verification and validation. In Proceedings of the 22nd SEM International Modal Analysis Conference, Dearborn, MI, USA, 26–29 January 2004. [Google Scholar]
- Schultz, M.T.; Mitchell, K.N.; Harper, B.K.; Bridges, T.S. Decision Making under Uncertainty; U.S. Army Corps of Engineers: Washington, DC, USA, 2010. [Google Scholar]
- Gedig, M.; Stiemer, S. Decision Tools for the Engineering of Steel Structures. Electron. J. Struct. Eng. 2006, 6, 19–38. [Google Scholar]
- Howard, R.A. The foundations of decision analysis revisited. In Advances in Decision Analysis; Edwards, R.F.M.W., von Winterfeldt, D., Eds.; Cambridge University Press: Cambridge, UK, 2007; Chapter 2. [Google Scholar]
- Hovgaard, M.K. Incorporating Structural Health Monitoring in the Design of Slip Formed Concrete Wind Turbine Towers; Department of Engineering, Aarhus University: Aarhus, Denmark, 2015. [Google Scholar]
- Zonta, D.; Glisic, B.; Adriaenssens, S. Value of information: Impact of monitoring on decision-making. Struct. Control Health Monit. 2014, 21, 1043–1056. [Google Scholar] [CrossRef]
- Wong, F.S.; Yao, J.T. Health monitoring and structural reliability as a value chain. Comput. Aided Civ. Infrastruct. Eng. 2001, 16, 71–78. [Google Scholar] [CrossRef]
- Pozzi, M.; Der Kiureghian, A. Assessing the value of information for long-term structural health monitoring. Proc. SPIE 7984 Health Monit. Struct. Biolog. Syst. 2011. [Google Scholar] [CrossRef]
- Attoh-Okine, N.O.; Ayyub, B.M. Applied Research in Uncertainty Modeling and Analysis, 2005 ed.; International Series in Intelligent Technologies; Springer: Berlin, Germany, 2005; Volume 20. [Google Scholar]
- Zhu, M. Uncertainty Quantification in Vibration-Based Structural Health Monitoring for Enhanced Decision-Making Capability; University of California: San Diego, CA, USA, 2012. [Google Scholar]
- Soroudi, A.; Amraeeb, T. Decision making under uncertainty in energy systems: State of the art. Renew. Sustain. Energy Rev. 2013, 28, 376–384. [Google Scholar] [CrossRef]
- Magee, J. Decision Trees for Decision Making; Harvard Business Review: Brighton, MA, USA, 1964. [Google Scholar]
- Pollino, C.A.; Henderson, C. Bayesian Networks: A Guide for Their Application in Natural Resource Management and Policy; Technical Report; Landscape Logic: Parkes, Australia, 2010. [Google Scholar]
- Pearl, J. Probabilistic Reasoning in Intelligent Systems: Networks of Plausible Inference; The Morgan Kaufmann Series in Representation and Reasoning; Morgan Kaufmann Publishers: San Mateo, CA, USA, 1988. [Google Scholar]
- Jensen, F.V. Bayesian Networks and Decision Graphs; Springer: New York, NY, USA, 2001. [Google Scholar]
- Russell, S.J.; Norvig, P. Artificial Intelligence: A Modern Approach, 2nd ed.; Prentice-Hall: Englewood Cliffs, NJ, USA, 2003. [Google Scholar]
- Raiffa, H.; Schlaifer, R. Applied Statistical Decision Theory; Division of Research, Harvard Business School: Boston, MA, USA, 1961. [Google Scholar]
- Benjamin, J.R.; Cornell, C.A. Probability, Statistics and Decisions for Civil Engineering; McGraw Hill Book Company: New York, NY, USA, 1970. [Google Scholar]
- Lee, E.; Park, Y.; Shin, J. Large engineering project risk management using a Bayesian belief network. Expert Syst. Appl. Int. J. 2009, 36, 5880–5887. [Google Scholar] [CrossRef]
- Fang, C.; Marle, F. A simulation-based risk network model for decision support in project risk management. Decis. Support Syst. 2012, 52, 635–644. [Google Scholar] [CrossRef]
- Broglio, S.; Der Kiureghian, A. Bayesian Network for Post-Earthquake Decision on Monitored Structures. In Vulnerability, Uncertainty, and Risk: Analysis, Modeling, and Management; ASCE: Hyattsville, MD, USA, 2011. [Google Scholar]
- Blaser, L.; Ohrnberger, M.; Riggelsen, C.; Babeyko, A.; Scherbaum, F. Bayesian networks for tsunami warning. Geophys. J. Int. 2011, 185, 1431–1443. [Google Scholar] [CrossRef]
- Hovgaard, M.K.; Brincker, R. Limited memory influence diagrams for structural damage detection decision-making. J. Civ. Struct. Health Monit. 2016, 6, 205–215. [Google Scholar] [CrossRef]
- Bensi, M.; Der Kiureghian, A.; Straub, D. Framework for Post-Earthquake Risk Assessment and Decision Making for Infrastructure Systems. ASCE-ASME J. Risk Uncertain. Eng. Syst. 2014, 1, 04014003. [Google Scholar] [CrossRef]
- Lauritzen, S.L.; Nilsson, D. Representing and solving decision problems with limited information. Manag. Sci. 2001, 47, 1235–1251. [Google Scholar] [CrossRef]
- Nielsen, J.S.; Sørensen, J.D. Bayesian networks as a decision tool for O&M of offshore wind turbines. In ASRANet: Integrating Structural Analysis, Risk & Reliability, Proceedings of the 5th International ASRANet Conference, Edinburgh, UK, 14–16 June 2010; ASRANet Ltd.: Glasgow, UK, 2010. [Google Scholar]
- Luque, J.; Straub, D. Algorithms for optimal risk-based planning of inspections using influence diagrams. In Proceedings of the 11th International Probabilistic Workshop, Brno, Czech Republic, 6–8 November 2013. [Google Scholar]
- Shang, K.L.; Hossen, Z. Applying Fuzzy Logic to Risk Assessment and Decision-Making; Research Report; Canadian Institute of Actuaries/Casualty Actuarial Society: Ottawa, ON, Canada, 2013. [Google Scholar]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef]
- Reda Tahaa, M.M.; Lucero, J. Damage identification for structural health monitoring using fuzzy pattern recognition. Eng. Struct. 2005, 27, 1774–1783. [Google Scholar] [CrossRef]
- De Miguel, L.J.; Blázquez, L.F. Fuzzy logic-based decision-making for fault diagnosis in a DC motor. Eng. Appl. Artif. Intell. 2005, 18, 423–450. [Google Scholar] [CrossRef]
- Ganguli, R. A Fuzzy Logic System for Ground Based Structural Health Monitoring of a Helicopter Rotor Using Modal Data. J. Intell. Mater. Syst. Struct. 2001, 12, 397–407. [Google Scholar] [CrossRef]
- Zeng, J.H.; An, M.; Smith, N.J. Application of a fuzzy based decision making methodology to construction project risk assessment. Int. J. Proj. Manag. 2007, 25, 589–600. [Google Scholar] [CrossRef]
- Sasmal, S.; Ramanjaneyulu, K.; Gopalakrishnan, S.; Lakshmanan, N. Fuzzy logic based condition rating of existing reinforced concrete bridges. J. Perform. Constr. Facil. 2006, 20, 261–273. [Google Scholar] [CrossRef]
- Ren, J.; Jenkinson, I.; Wang, J.; Xu, D.L.; Yang, J.B. An offshore risk analysis method using fuzzy Bayesian network. J. Offshore Mech. Arct. Eng. 2009, 131, 1–12. [Google Scholar] [CrossRef]
- Kubier, O. Applied Decision-Making in Civil Engineering; Swiss Federal Institute of Technology Zurich: Zürich, Switzerland, 2006. [Google Scholar]
- Nielsen, J.S. Risk-Based Operation and Maintenance of Offshore Wind Turbines. Ph.D. Thesis, Aalborg University, Aalborg, Denmark, 2013. [Google Scholar]

{kind=link}
| Data Domain | Representative Methods | Advantages and Disadvantages |
|---|---|---|
| Time domain | Ibrahim method Random decrement ERA ARMA family Wavelet analysis EMD and HHT RSSI, SSI-DATA, SSI-COV KDE | Advantages: |
| straightforward to use the time domain responses | ||
| eliminate the need to perform frequency transformation | ||
| no associated errors such as leakage and truncation | ||
| preserved nonlinear behavior | ||
| Disadvantages: | ||
| significant effects of noise | ||
| difficult to interpret signal information | ||
| Frequency domain | FRF shapes FRF curvature Transmissibility Peak picking FDD | Advantages: |
| abundant information on structure dynamic behavior | ||
| contains frequency information in a wide range | ||
| without further extraction and processing | ||
| Disadvantages: | ||
| some requires the input information | ||
| the features are too abstract | ||
| Modal domain | Natural frequency Mode shapes and curvatures Modal strain energy Strain mode shapes Dynamically flexibility High-order derivatives Signal processing based | Advantages: |
| modal properties are physically meaningful | ||
| easy to be interpreted or interrogated | ||
| from output-only data and not require artificial forces | ||
| Disadvantages: | ||
| lose much of the information | ||
| numerical errors caused by inaccurate curve fitting |
| Methods | Guidelines |
|---|---|
| Gradient-based Algorithms | suited for problems with many design variables (more than 50) |
| where the analysis is computationally expensive | |
| when numerical noise is not severe | |
| when gradients are available and local extrema is not an issue | |
| Evolutionary Algorithms | suited for problems with fewer design variables (less than 50) |
| where the analysis is computationally inexpensive | |
| when numerical noise is severe | |
| when the gradient does not exists and a global optimum is required | |
| for discrete and combinatorial optimization problems when the objective | |
| and/or constraint functions are discontinuous | |
| Multi-objective Algorithms | for problems with more than one conflict objective functions |
| gradient based Pareto algorithm for differentiable problems | |
| evolutionary based Pareto algorithm for all other cases |
| Methods | Guidelines |
|---|---|
| Decision Trees | Advantages: |
| suitable for simple issues and easy to understand | |
| good at dealing with discrete variables | |
| straightforward for decision-making with limited choices | |
| Disadvantages: | |
| not suitable for complex issues that require many factors and relationships | |
| exponential growth in number of branches | |
| all variables must be treated as discrete even if they are continuous | |
| weak at identifying linear relationship due to its discreteness | |
| Bayesian Networks and Influence Diagrams | Advantages: |
| suitable for simple issues and the cause-and-effect relationships are known | |
| can estimate the conditional probability and distribution | |
| easy to update models when new knowledge or data becomes available | |
| Disadvantages: | |
| not suitable for complex issues involving many variables | |
| expensive to determine relationships and conditional probability functions | |
| require expertise about cause-and-effect relationships | |
| Fuzzy Logic Models | Advantages: |
| suitable for complex problems with insufficient and imprecise data | |
| easy to incorporate data or opinions expressed by natural language | |
| useful for problems that are not well understood | |
| Disadvantages: | |
| tedious to develop fuzzy rules and membership functions | |
| outputs can be interpreted in a number of ways making the analysis difficult | |
| require a lot of data and expertise to develop a fuzzy system |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kong, X.; Cai, C.-S.; Hu, J. The State-of-the-Art on Framework of Vibration-Based Structural Damage Identification for Decision Making. Appl. Sci. 2017, 7, 497. https://doi.org/10.3390/app7050497
Kong X, Cai C-S, Hu J. The State-of-the-Art on Framework of Vibration-Based Structural Damage Identification for Decision Making. Applied Sciences. 2017; 7(5):497. https://doi.org/10.3390/app7050497
Chicago/Turabian StyleKong, Xuan, Chun-Sheng Cai, and Jiexuan Hu. 2017. "The State-of-the-Art on Framework of Vibration-Based Structural Damage Identification for Decision Making" Applied Sciences 7, no. 5: 497. https://doi.org/10.3390/app7050497
APA StyleKong, X., Cai, C.-S., & Hu, J. (2017). The State-of-the-Art on Framework of Vibration-Based Structural Damage Identification for Decision Making. Applied Sciences, 7(5), 497. https://doi.org/10.3390/app7050497