Vibrotactile Display of Flight Attitude with Combination of Multiple Coding Parameters


Abstract
:1. Introduction
2. Materials and Methods
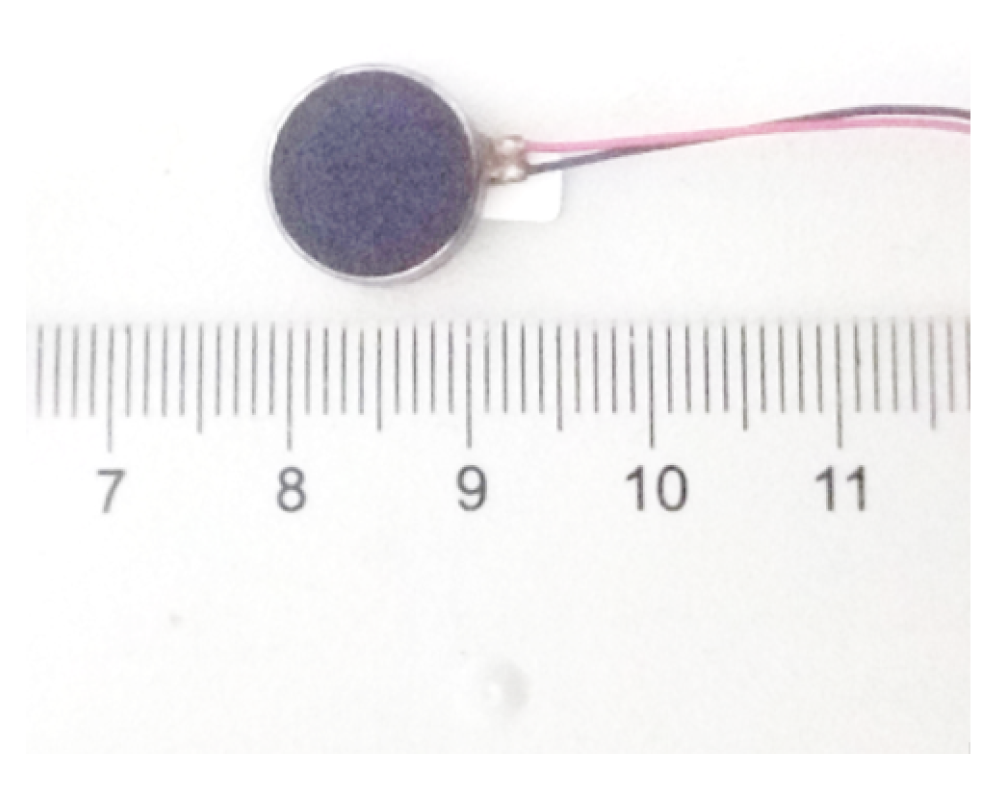
2.1. Vibrotactile Actuators
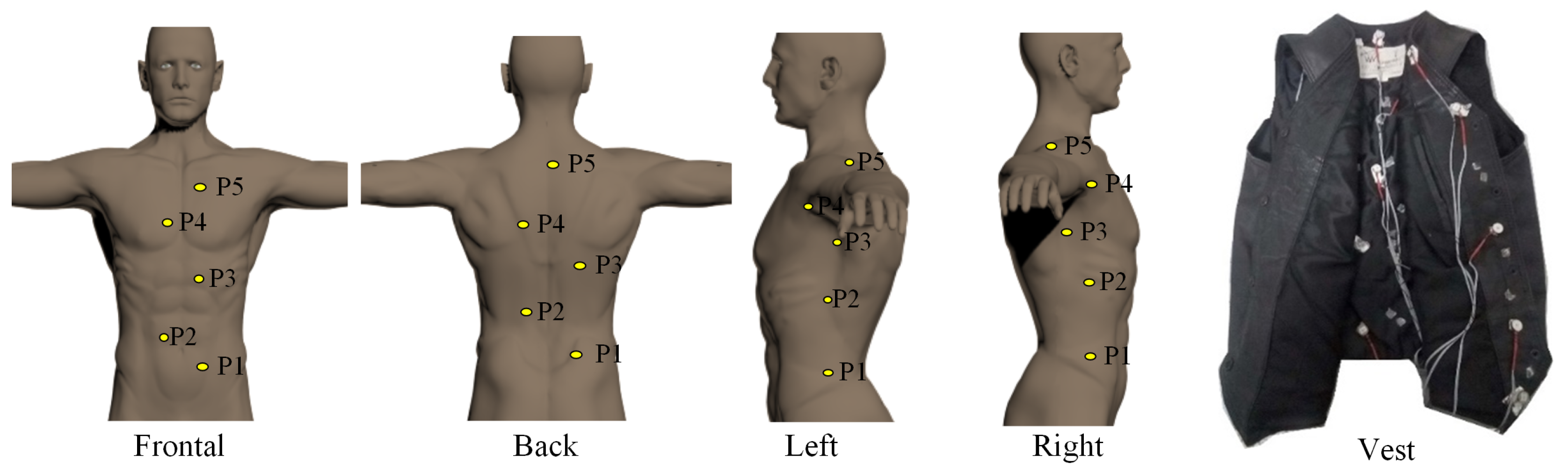
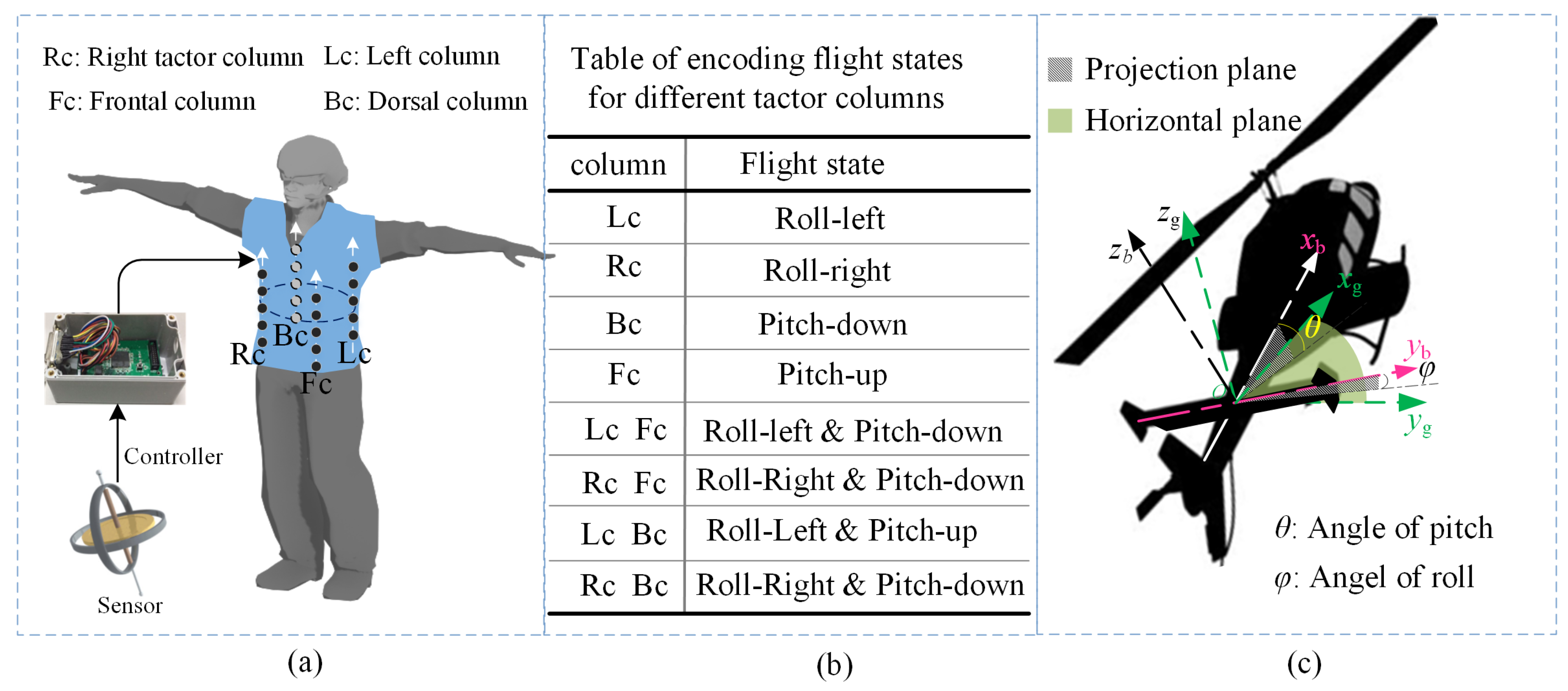
2.2. Design of Wearing Vest
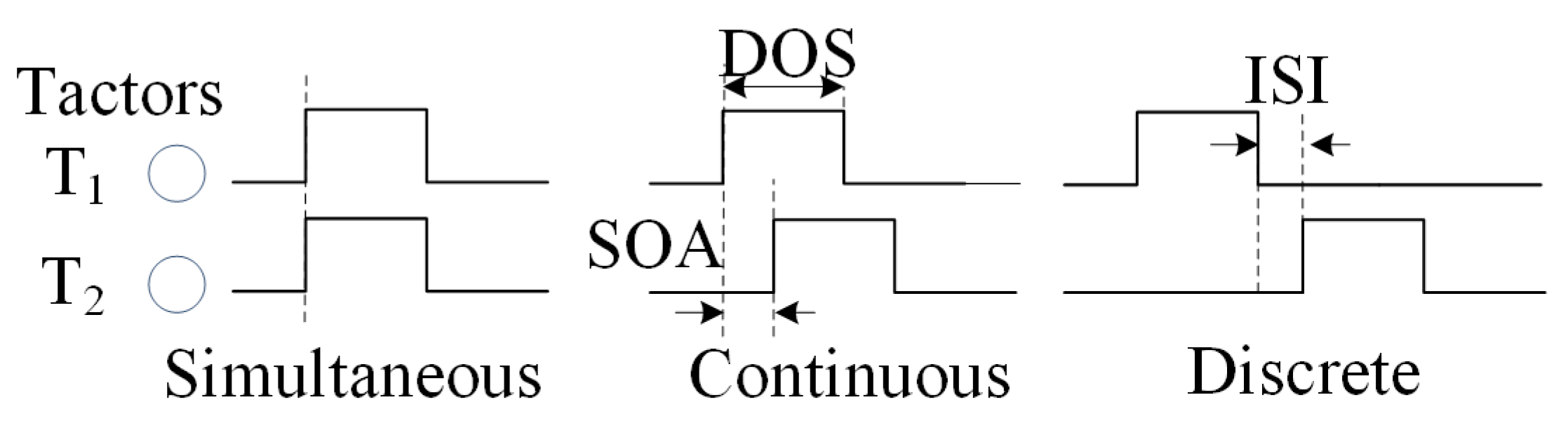
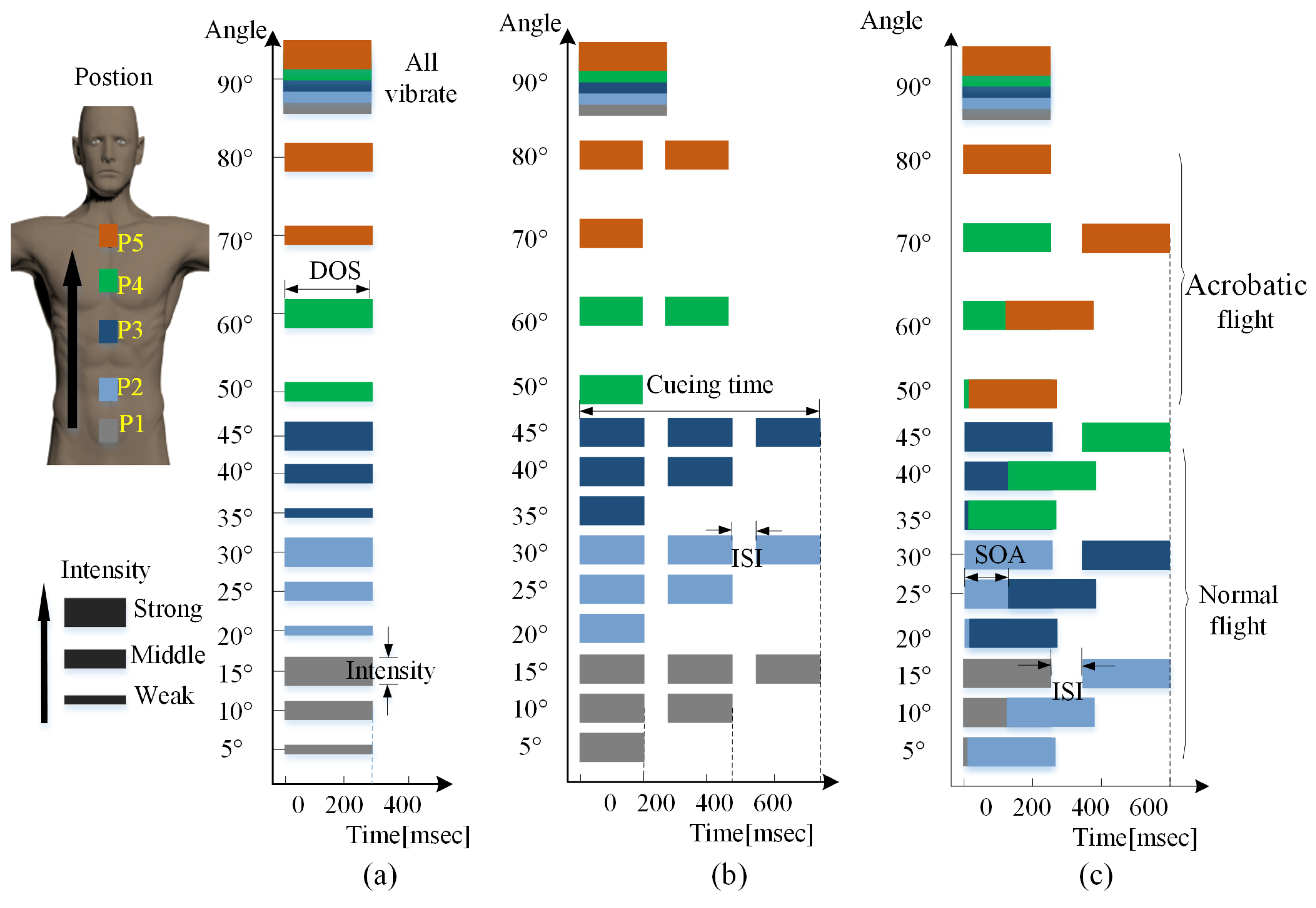
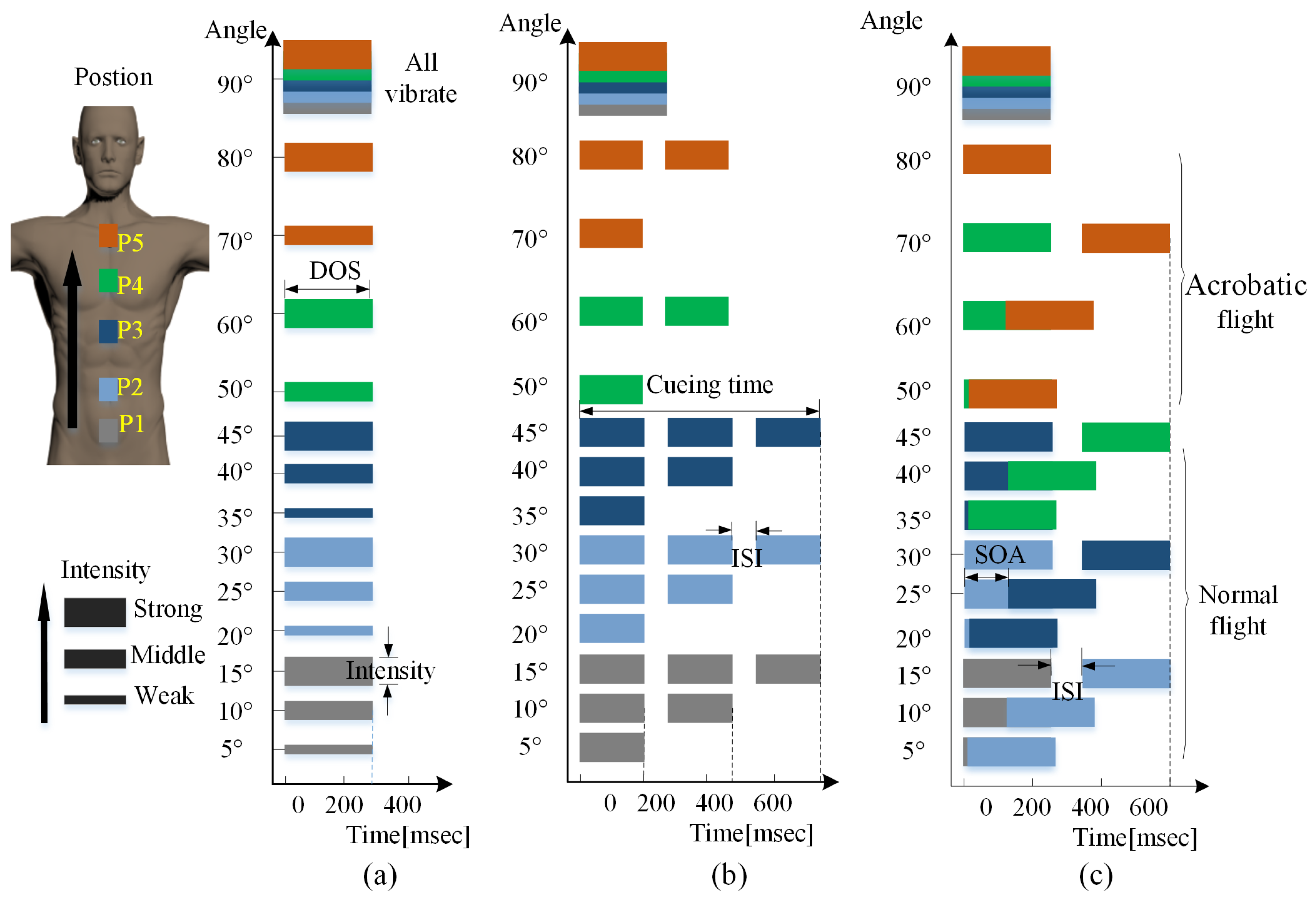
2.3. Tactile Coding Parameters
3. Psychophysical Experiments
3.1. Participants
3.2. Experimental Design
3.3. General Procedures
3.4. Experiment 1
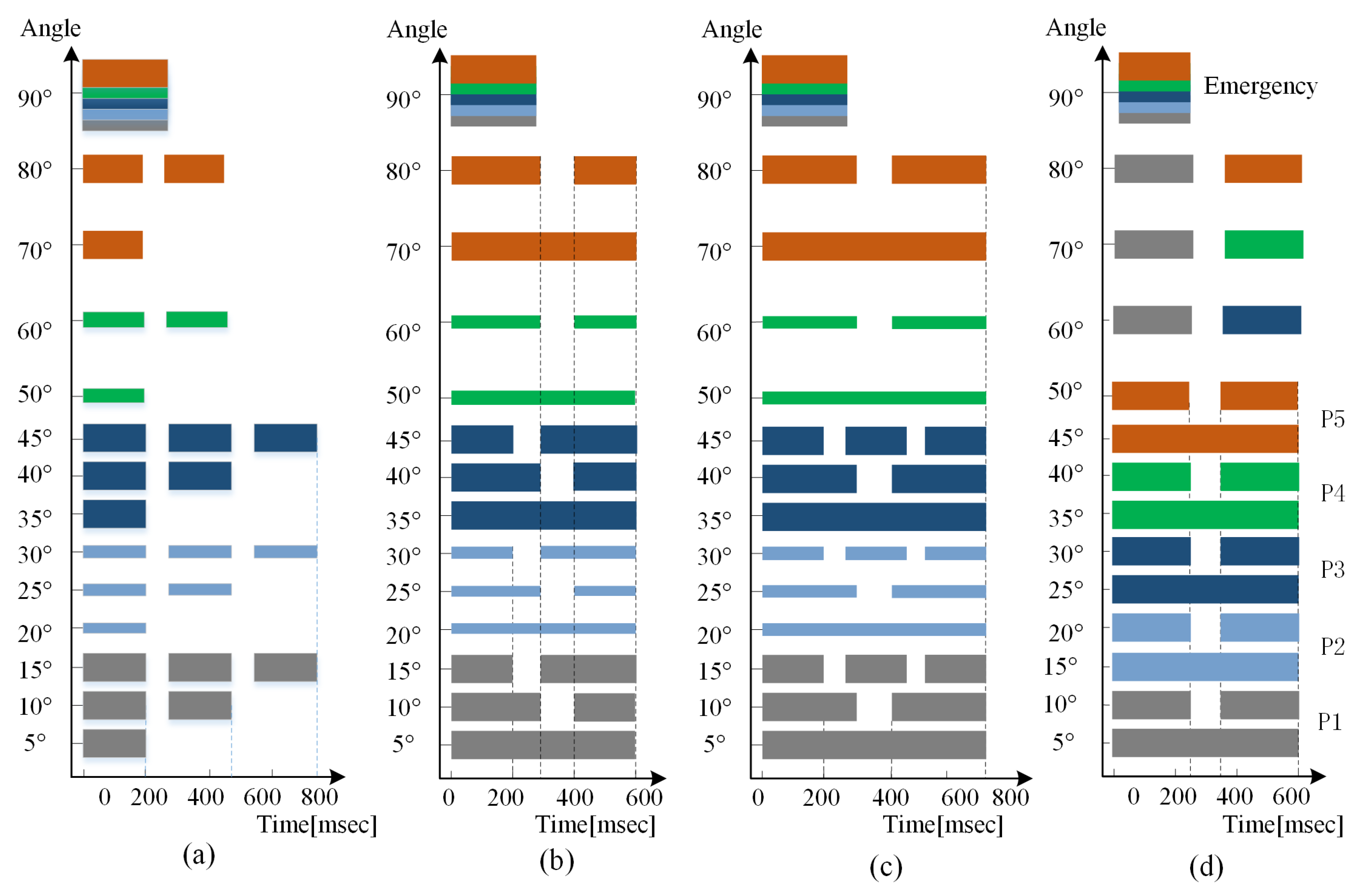
3.4.1. Vibrotactile Coding Design
3.4.2. Experimental Results
3.5. Experiment 2
3.5.1. Vibrotactile Coding Design
3.5.2. Experimental Results
4. Discussion
4.1. Comparisons with Previous Work
4.2. Limitations of our Work
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Newman, D.G.; FAICD, A. An Overview of Spatial Disorientation as a Factor in Aviation Accidents and Incidents; Australian Transport Safety Bureau: Canberra, Australia, 2007.
- Van Erp, J.B.; Self, B.P. Tactile Displays for Orientation, Navigation and Communication in Air, Sea and Land Environments; North Atlantic Treaty Organisation, Research & Technology Organisation: Neuilly sur Seine, France, 2008. [Google Scholar]
- Rupert, A.H. An instrumentation solution for reducing spatial disorientation mishaps. IEEE Eng. Med. Biol. Mag. 2000, 19, 71–80. [Google Scholar] [CrossRef] [PubMed]
- Kim, S.H.; Kaber, D.B. Examining the Effects of Conformal Terrain Features in Advanced Head-Up Displays on Flight Performance and Pilot Situation Awareness. Hum. Factors Ergon. Manuf. Serv. Ind. 2014, 24, 386–402. [Google Scholar] [CrossRef]
- Rupert, A.H.; Lawson, B.D.; Basso, J.E. Tactile Situation Awareness System Recent Developments for Aviation. Proc. Hum. Factors Ergon. Soc. Ann. Meet. 2016, 60, 722–726. [Google Scholar] [CrossRef]
- Payette, J.; Hayward, V.; Ramstein, C.; Bergeron, D. Evaluation of a force feedback (haptic) computer pointing device in zero gravity. In Proceedings of the ASME Dynamcis Systems and Control Division; American Society of Mechanical Engineers: New York, NY, USA, 1996; Volume 58, pp. 547–553. [Google Scholar]
- Traylor, R.; Tan, H.Z. Development of a wearable haptic display for situation awareness in altered-gravity environment: Some initial findings. In Proceedings of the 10th Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, Orlando, FL, USA, 24–25 March 2002; pp. 159–164. [Google Scholar]
- Van Erp, J.B.; van Veen, H.A. Touch down: the effect of artificial touch cues on orientation in microgravity. Neurosci. Lett. 2006, 404, 78–82. [Google Scholar] [CrossRef] [PubMed]
- Wickens, C.D. Processing resources and attention. In Multiple-Task Performance; CRC Press: Boca Raton, FL, USA, 1991; pp. 3–34. [Google Scholar]
- Wickens, C.D.; Liu, Y. Codes and modalities in multiple resources: A success and a qualification. Hum. Factors J. Hum. Factors Ergon. Soc. 1988, 30, 599–616. [Google Scholar] [CrossRef] [PubMed]
- Heuten, W.; Henze, N.; Boll, S.; Pielot, M. Tactile wayfinder: A non-visual support system for wayfinding. In Proceedings of the 5th Nordic Conference on Human—Computer Interaction: Building Bridges, Lund, Sweden, 20–22 October 2008; ACM: New York, NY, USA, 2008; pp. 172–181. [Google Scholar]
- Van Erp, J.B.; Van Veen, H.A. Vibrotactile in-vehicle navigation system. Transp. Res. Part F Traffic Psychol. Behav. 2004, 7, 247–256. [Google Scholar] [CrossRef]
- Ho, C.; Tan, H.Z.; Spence, C. Using spatial vibrotactile cues to direct visual attention in driving scenes. Transp. Res. Part F Traffic Psychol. Behav. 2005, 8, 397–412. [Google Scholar] [CrossRef]
- Carrera, A.; Alonso, A.; Rosa, R.D.L.; Abril, E. Sensing Performance of a Vibrotactile Glove for Deaf-Blind People. Appl. Sci. 2017, 7, 317. [Google Scholar] [CrossRef]
- Scott, J.J.; Gray, R. A Comparison of Tactile, Visual, and Auditory Warnings for Rear-End Collision Prevention in Simulated Driving. Hum. Factors J. Hum. Factors Ergon. Soc. 2008, 50, 264–275. [Google Scholar] [CrossRef] [PubMed]
- Morrell, J.; Wasilewski, K. Design and evaluation of a vibrotactile seat to improve spatial awareness while driving. In Proceedings of the 2010 IEEE Haptics Symposium, Waltham, MA, USA, 25–26 March 2010. [Google Scholar]
- Flores, G.; Kurniawan, S.; Manduchi, R.; Martinson, E.; Morales, L.M.; Sisbot, E.A. Vibrotactile Guidance for Wayfinding of Blind Walkers. IEEE Trans. Haptics 2015, 8, 306–317. [Google Scholar] [CrossRef] [PubMed]
- Cardin, S.; Vexo, F.; Thalmann, D. Vibro-tactile interface for enhancing piloting abilities during long term flight. J. Robot. Mechatron. 2006, 18, 381–391. [Google Scholar] [CrossRef]
- Kim, Y.; Harders, M.; Gassert, R. Identification of Vibrotactile Patterns Encoding Obstacle Distance Information. IEEE Trans. Haptics 2015, 8, 298–305. [Google Scholar] [CrossRef] [PubMed]
- McGrath, B.J.; Estrada, A.; Braithwaite, M.G.; Raj, A.K.; Rupert, A.H. Tactile Situation Awareness System Flight Demonstration; Technical Report, DTIC Document; Defense Technical Information Center: Fort Belvoir, VA, USA, 2004. [Google Scholar]
- Tan, H.Z.; Durlach, N.I.; Reed, C.M.; Rabinowitz, W.M. Information transmission with a multifinger tactual display. Atten. Percept. Psychophys. 1999, 61, 993–1008. [Google Scholar] [CrossRef]
- Tan, H.Z. A Haptic Back Display for Attentional and Directional Cueing. Haptics-e 2003, 3, 1–20. [Google Scholar]
- Novich, S.D.; Eagleman, D.M. Using space and time to encode vibrotactile information: toward an estimate of the skin’s achievable throughput. Exp. Brain Res. 2015, 233, 2777–2788. [Google Scholar] [CrossRef] [PubMed]
- Saddiki-Traki, F.; Tremblay, N.; Tremblay, R.W.; Derraz, S.; El-Khamlichi, A.; Harrisson, M. Differences between the tactile sensitivity on the anterior torso of normal individuals and those having suffered complete transection of the spinal cord. Somatosens. Mot. Res. 1999, 16, 391–401. [Google Scholar] [CrossRef] [PubMed]
- Weinstein, S. Intensive and Extensive Aspects of Tactile Sensitivity as a Function of Body Part, Sex and Laterality. In Proceedings of the first International Symposium on the Skin Senses, Tallahassee, FL, USA, March 1966; pp. 195–218. [Google Scholar]
- Van Erp, J.B. Vibrotactile spatial acuity on the torso: Effects of location and timing parameters. In Proceedings of the First Joint Eurohaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, Pisa, Italy, 18–20 March 2005; pp. 80–85. [Google Scholar]
- Van Erp, J.B. Presenting directions with a vibrotactile torso display. Ergonomics 2005, 48, 302–313. [Google Scholar] [CrossRef] [PubMed]
- Van Erp, J.B.; Van Veen, H.A.; Jansen, C.; Dobbins, T. Waypoint navigation with a vibrotactile waist belt. ACM Trans. Appl. Percept. 2005, 2, 106–117. [Google Scholar] [CrossRef]
- Alluisi, E.A.; Warm, J.S. Things that go together: A review of stimulus-response compatibility and related effects. Adv. Psychol. 1990, 65, 3–30. [Google Scholar]
- Cholewiak, R.W.; Collins, A.A. The generation of vibrotactile patterns on a linear array: Influences of body site, time, and presentation mode. Percept. Psychophys. 2000, 62, 1220–1235. [Google Scholar] [CrossRef] [PubMed]
- Na, L. Optimization of Vibrotactile Device Experimental Study on Perception Characteristics. Ph.D. Thesis, Southeast University, Nanjing, China, 2016. [Google Scholar]
- Sachs, R.M.; Miller, J.D.; Grant, K.W. Perceived magnitude of multiple electrocutaneous pulses. Atten. Percept. Psychophys. 1980, 28, 255–262. [Google Scholar] [CrossRef]
- Kirman, J.H. Tactile apparent movement: The effects of interstimulus onset interval and stimulus duration. Atten. Percept. Psychophys. 1974, 15, 1–6. [Google Scholar] [CrossRef]
- Hayward, V. A brief taxonomy of tactile illusions and demonstrations that can be done in a hardware store. Brain Res. Bull. 2008, 75, 742–752. [Google Scholar] [CrossRef] [PubMed]
- Lederman, S.J.; Jones, L.A. Tactile and Haptic Illusions. IEEE Trans. Haptics 2011, 4, 273–294. [Google Scholar] [CrossRef] [PubMed]
- Wolpaw, J.R.; Ramoser, H.; McFarland, D.J.; Pfurtscheller, G. EEG-based communication: improved accuracy by response verification. IEEE Trans. Rehabil. Eng. 1998, 6, 326–333. [Google Scholar] [CrossRef] [PubMed]
- Wolpaw, J.R.; Birbaumer, N.; McFarland, D.J.; Pfurtscheller, G.; Vaughan, T.M. Brain-computer interfaces for communication and control. Clin. Neurophysiol. 2002, 113, 767–791. [Google Scholar] [CrossRef]
- Gescheider, G. The Classical Psychophysical Methods. In Psychophysics: The Fundamentals, 3rd ed.; Lawrence Erlbaum Associates: Mahwah, NJ, USA, 1997; Chapter 3. [Google Scholar]
- Eriksson, L.; van Erp, J.; Carlander, O.; Levin, B.; van Veen, H.; Veltman, H. Vibrotactile and visual threat cueing with high G threat intercept in dynamic flight simulation. Proc. Hum. Factors Ergon. Soc. Ann. Meet. 2006, 50, 1547–1551. [Google Scholar] [CrossRef]
- Hoh, R.H.; Mitchell, D.G. Handling-qualities specification-a functional requirement for the flight control system. In Advances in Aircraft Flight Control; CRC Press: Boca Raton, FL, USA, 1996; pp. 3–33. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Group | Ranges of Angle (Degree) | Flight Status |
|---|---|---|
| ≥90 | Emergency | |
| 5 | [70, 80) [80, 90) | Acrobatic flight |
| 4 | [50, 60) [60, 70) | |
| 3 | [35, 40) [40, 45) [45, 50) | |
| 2 | [20, 25) [25, 30) [30, 35) | Normal flight |
| 1 | [05, 10) [10, 15) [15,20) | |
| [0, 5) | Steady flight |
| Parameters for Single Tactor | Vibrating location (P), Intensity (I), Rhythm (R) |
| Parameters for Multiple Tactors | Vibrating mode (M) |
| CM(I) | CM(J) | Mean Difference/I-J(Z) | Sig |
|---|---|---|---|
| LI | LR | −0.3580 * | 0.000 |
| LI | LM | −0.2420 * | 0.005 |
| LR | LM | 0.1160 * | 0.122 |
| CM(I) | CM(J) | Mean Difference/I-J(Z) | Sig |
|---|---|---|---|
| LR | LRI1 | −0.17367 * | 0.004 |
| LR | LRI2 | −0.00610 | 0.916 |
| LR | LRI3 | −0.11890 * | 0.043 |
| LRI1 | LRI2 | 0.17976 * | 0.000 |
| LRI1 | LRI3 | 0.05476 | 0.219 |
| LRI2 | LRI3 | −0.12500 * | 0.007 |
| PRM | PRI1 | 0.01424 | 0.694 |
| Source | Quadratic Sum | Dof | Mean Square | F | Sig |
|---|---|---|---|---|---|
| States | 0.019 | 3 | 0.006 | 0.197 | 0.898 |
| Locations | 0.281 | 3 | 0.094 | 2.970 | 0.032 |
| Rhythms | 0.109 | 2 | 0.054 | 1.721 | 0.181 |
| States × Locations | 0.323 | 9 | 0.036 | 1.136 | 0.337 |
| States × Rhythms | 0.121 | 6 | 0.020 | 0.638 | 0.700 |
| Locations × Rhythms | 0.049 | 4 | 0.012 | 0.385 | 0.819 |
| States × Locations × Rhythms | 0.292 | 12 | 0.024 | 0.770 | 0.681 |
| TSASs | Tactor Arrangement | Number of Used Tactors | Coding Methods | Resolution /Degree |
|---|---|---|---|---|
| This work | 4 × 5 matrix vest | 20 | Coding with LRM | 5 |
| [3] | 8 × 5 matrix vest | 40 | Coding with LI | 5 |
| [18] | 8-tactor belt | 8 | Coding with L | Simple information |
| [39] | 60-tactor jacket | 60 | Coding with L | 30 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ouyang, Q.; Wu, J.; Wu, M. Vibrotactile Display of Flight Attitude with Combination of Multiple Coding Parameters. Appl. Sci. 2017, 7, 1291. https://doi.org/10.3390/app7121291
Ouyang Q, Wu J, Wu M. Vibrotactile Display of Flight Attitude with Combination of Multiple Coding Parameters. Applied Sciences. 2017; 7(12):1291. https://doi.org/10.3390/app7121291
Chicago/Turabian StyleOuyang, Qiangqiang, Juan Wu, and Miao Wu. 2017. "Vibrotactile Display of Flight Attitude with Combination of Multiple Coding Parameters" Applied Sciences 7, no. 12: 1291. https://doi.org/10.3390/app7121291
APA StyleOuyang, Q., Wu, J., & Wu, M. (2017). Vibrotactile Display of Flight Attitude with Combination of Multiple Coding Parameters. Applied Sciences, 7(12), 1291. https://doi.org/10.3390/app7121291