Input–Output Finite Time Stabilization of Time-Varying Impulsive Positive Hybrid Systems under MDADT

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Problem Formulation and Preliminaries
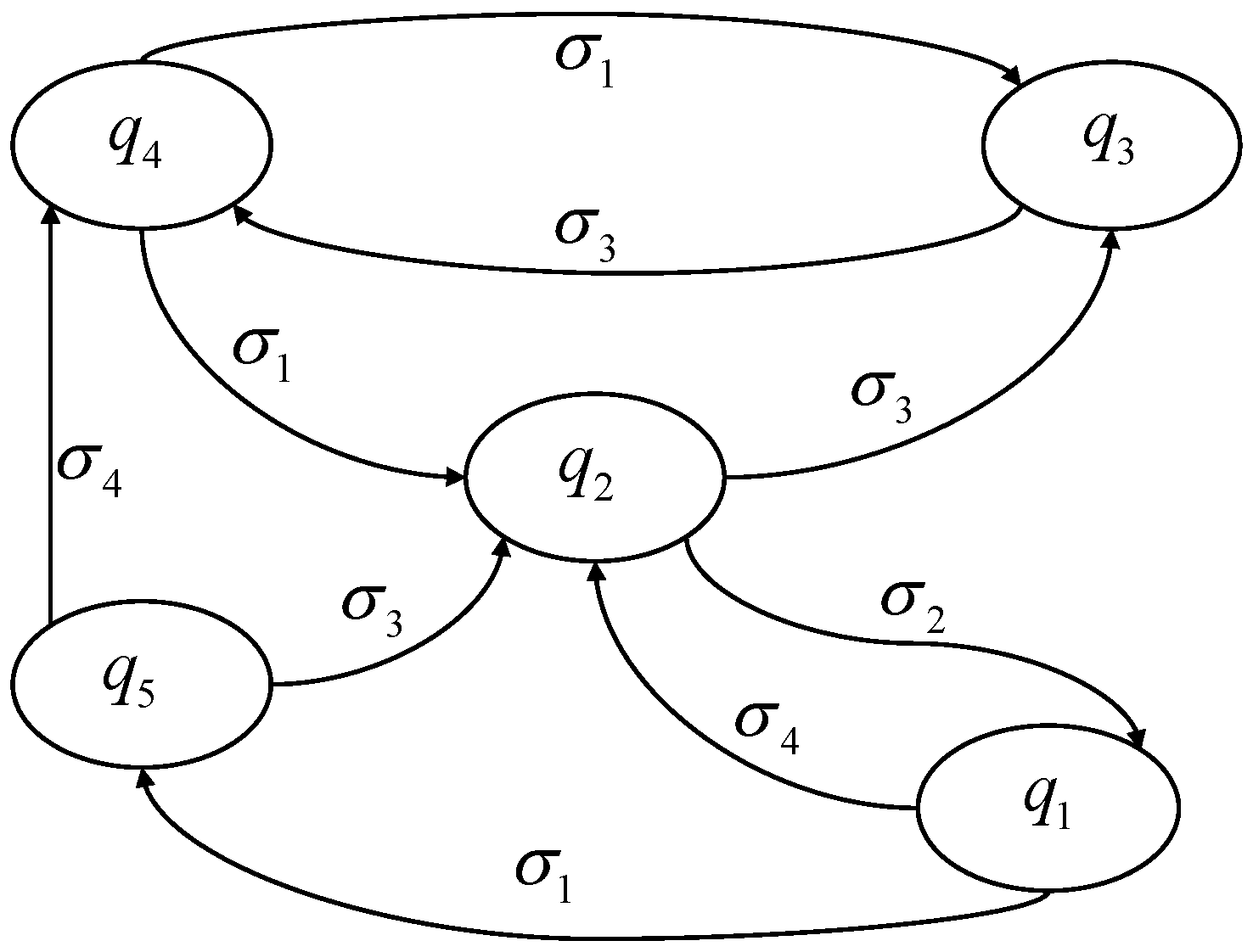
2.1. FSM
- (1)
- there is a shortest path from to E, and the current node jumps along this path; and
- (2)
- there is a positive integer , for any , ;
2.2. IO-FTS
- (1)
- the FSM is stable w.r.t. , , and
- (2)
- ,
- (1)
- The set coincides with the set of norm-bounded integrable signals over , defined as follows:.
- (2)
- The set coincides with the set of uniformly bounded signals over , defined as follows:.
3. Single Linear System
3.1. Stability of Autonomous System
- (1)
- ,
- (2)
- ,
- (3)
- ,
- (4)
- , and
- (5)
- ,
- (1)
- ,
- (2)
- , and
- (3)
- ,
- (1)
- ,
- (2)
- ,
- (3)
- ,
- (4)
- , and
- (5)
- ,
3.2. Stabilization of Non-Autonomous Systems
- (1)
- ,
- (2)
- ,
- (3)
- ,
- (4)
- ,
- (5)
- , and
- (6)
- ,
- (1)
- ,
- (2)
- ,
- (3)
- ,
- (4)
- ,
- (5)
- , and
- (6)
- ,
4. Hybrid Systems
4.1. Stability of Autonomous Hybrid Systems
- (1)
- is strictly monotonically decreasing w.r.t. k,
- (2)
- ,
- (3)
- ,
- (4)
- , and
- (5)
- ,
- (1)
- is strictly monotonically decreasing w.r.t. k,
- (2)
- ,
- (3)
- ,
- (4)
- , and
- (5)
- ,
4.2. Stabilization of Non-Autonomous Hybrid Systems
- (1)
- is strictly monotonically decreasing w.r.t. k,
- (2)
- ,
- (3)
- ,
- (4)
- ,
- (5)
- , and
- (6)
- ,
- (1)
- is strictly monotonically decreasing w.r.t. k,
- (2)
- ,
- (3)
- ,
- (4)
- ,
- (5)
- , and
- (6)
- ,
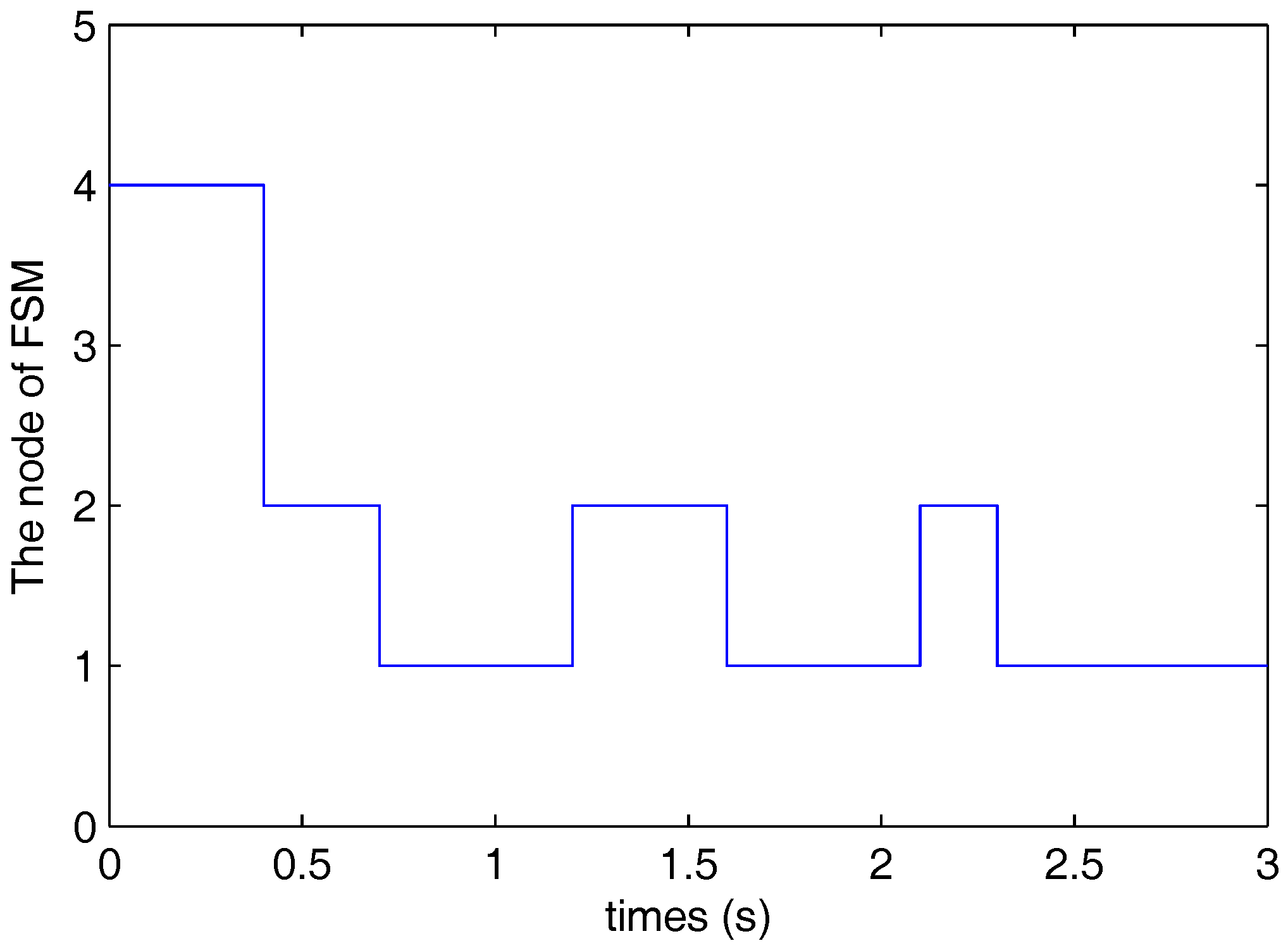
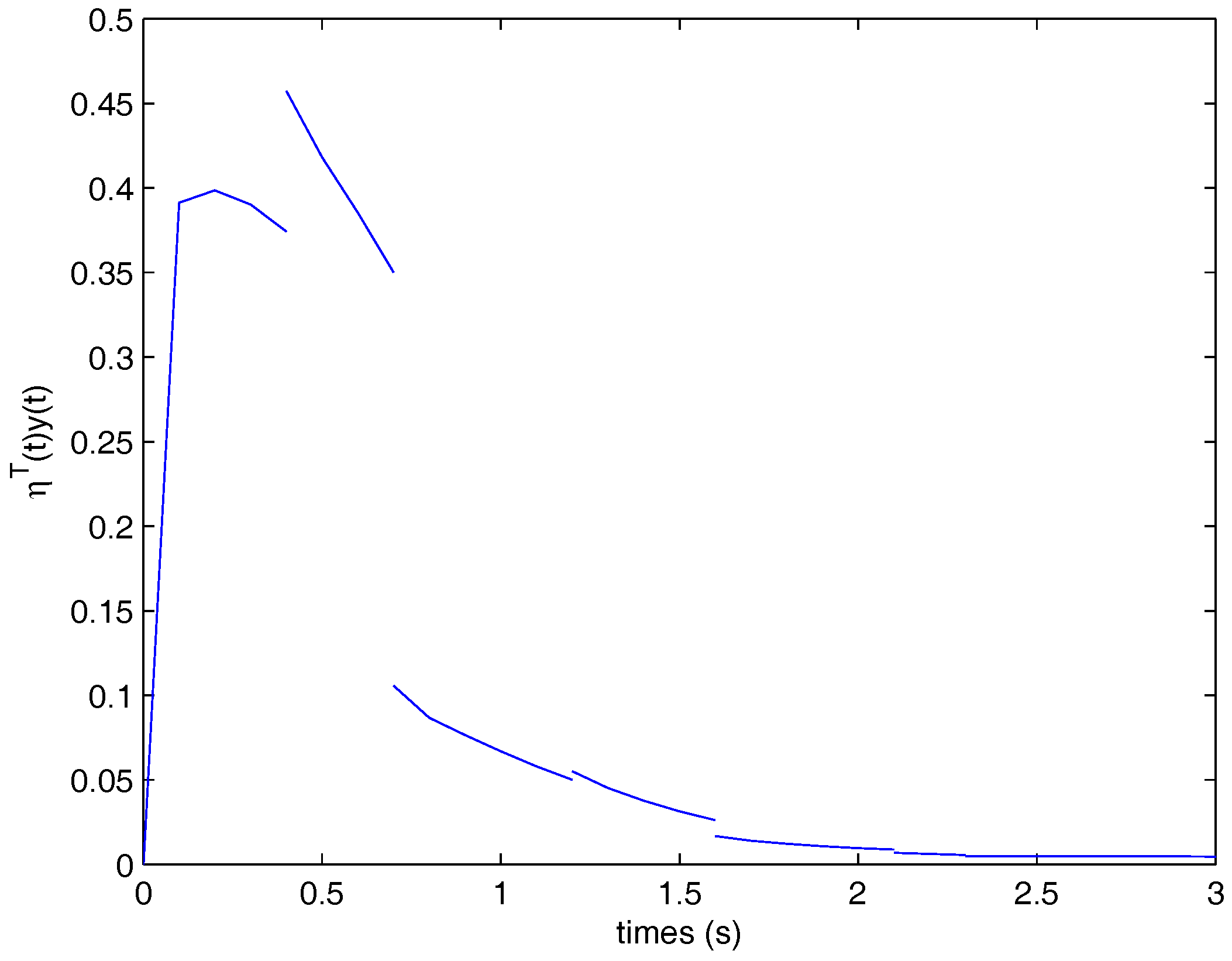
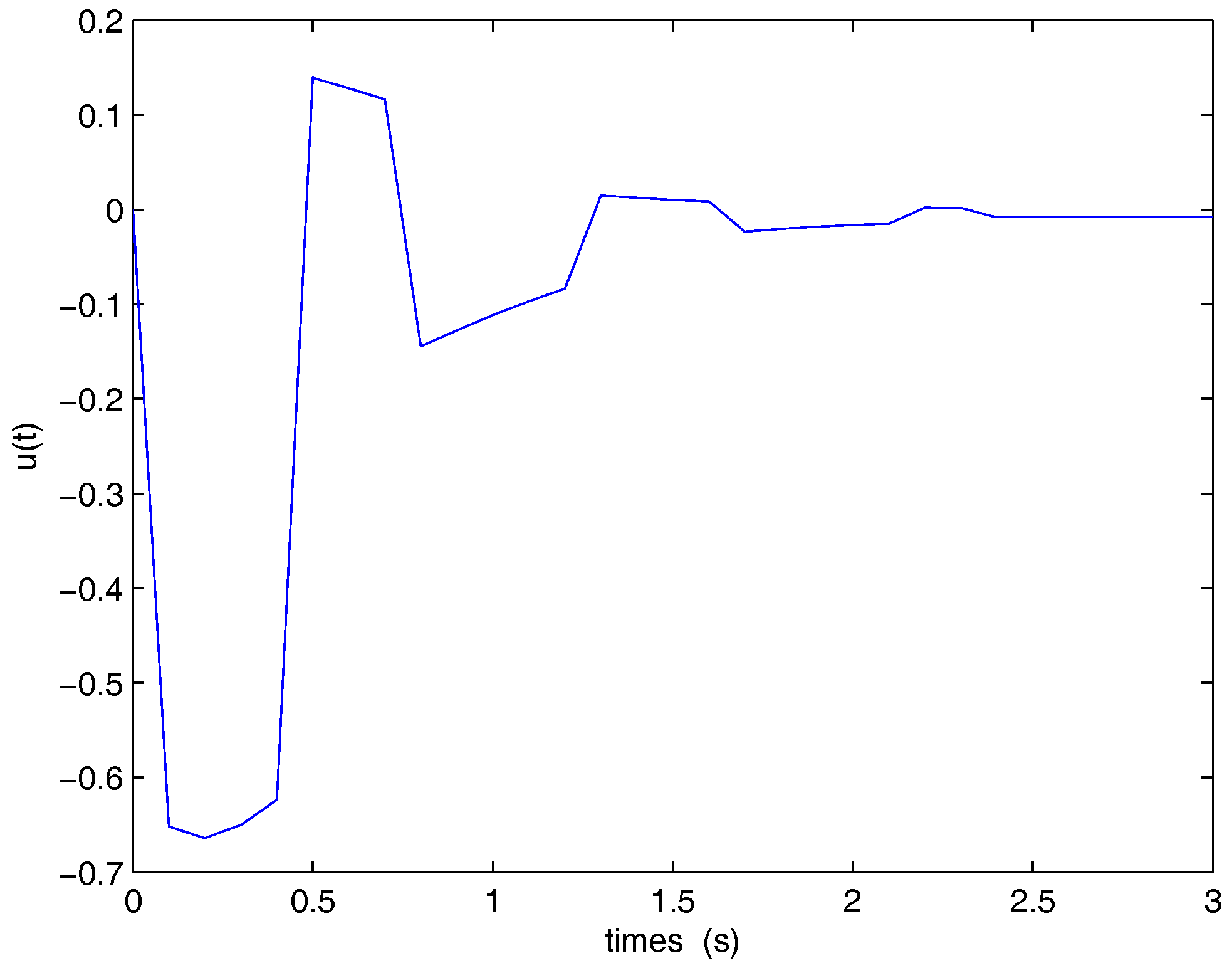
5. Numerical Example
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| FSM | finite state machine |
| FTS | finite time stability |
| IO-FTS | input-output finite time stability |
| MDADT | mode-dependent average dwell time |
| LMI | linear matrix inequality |
References
- Branicky, M.S. Multiple Lyapunov fuctions and other analysis tools for switched and hybrid systems. IEEE Trans. Autom. Control 1998, 43, 475–482. [Google Scholar] [CrossRef]
- Chen, G.P.; Yang, Y.; Li, J.M. Finite time stability of a class of hybrid dynamical systems. IET Control Theory Appl. 2012, 6, 8–13. [Google Scholar] [CrossRef]
- Lu, X.; Zhou, M.; Ammari, A.C.; Ji, J. Hybrid Petri Nets for Modeling and Analysis of Microgrid Systems. IEEE CAA J. Autom. Sin. 2016, 3, 347–354. [Google Scholar]
- Wu, N.Q.; Zhou, M.C.; Li, Z.W. Short-Term Scheduling of Crude-Oil Operations: Enhancement of Crude-Oil Operations Scheduling Using a Petri Net-Based Control-Theoretic Approach. IEEE Robot. Autom. Mag. 2015, 22, 64–76. [Google Scholar] [CrossRef]
- Kobayashi, K.; Imura, J.; Hiraishi, K. Stabilization of finite automata with application to hybrid systems control. Discret. Event Dyn. Syst. Theory Appl. 2011, 21, 519–545. [Google Scholar] [CrossRef]
- Ozveren, C.M.; Willsky, A.S.; Antsaklis, P.J. Stability and stabilizability of discrete event dynamic systems. J. Assoc. Comput. Mach. 1991, 38, 730–752. [Google Scholar] [CrossRef]
- Ozveren, C.M.; Willsky, A.S. Observability of discrete event dynamic systems. IEEE Trans. Autom. Control 1990, 35, 797–806. [Google Scholar] [CrossRef]
- Balluchi, A.; Benvenuti, L.; Benedetto, M.D.; Sangiovanni-Vincentelli, A. Design of observers for hybrid systems. In Hybrid Systems: Computation and Control (HSCC 02), LNCS. 2289; Tomlin, C.J., Greenstreet, M.R., Eds.; Springer: Berlin, Germany, 2002; pp. 76–89. [Google Scholar]
- Yang, Y.; Chen, G.P. Finite-time stability of fractional order impulsive switched systems. Int. J. Robust Nonlinear Control 2015, 25, 2207–2222. [Google Scholar] [CrossRef]
- Gao, R.; Liu, X.Z.; Yang, J.L. On optimal control problems of a class of impulsive switching systems with terminal states constraints. Nonlinear Anal. 2010, 73, 1940–1951. [Google Scholar] [CrossRef]
- Zhao, X.D.; Shi, P.; Yin, Y.F. New Results on Stability of Slowly Switched Systems: A Multiple Discontinuous Lyapunov Function Approach. IEEE Trans. Autom. Control 2017, 62, 3502–3509. [Google Scholar] [CrossRef]
- Farina, L.; Rinaldi, S. Positive Linear Systems; Wiley: New York, NY, USA, 2000. [Google Scholar]
- Benzaouia, A.; Oubah, R. Stability and stabilization by output feedback control of positive Takagi-Sugeno fuzzy discrete-time systems with multiple delays. Nonlinear Anal. Hybrid Syst. 2014, 11, 154–170. [Google Scholar] [CrossRef]
- Wang, C.H.; Huang, T.M. Static output feedback control for positive linear continuous-time systems. Int. J. Robust Nonlinear Control 2013, 23, 1537–1544. [Google Scholar] [CrossRef]
- Haddad, W.M.; Chellaboina, V. Stability theory for nonnegative and compartmental dynamical systems with time delay. Syst. Control Lett. 2004, 51, 355–361. [Google Scholar] [CrossRef]
- Wang, J.; Zhao, J. Stabilisation of switched positive systems with actuator saturation. IET Control Theory Appl. 2016, 10, 717–723. [Google Scholar] [CrossRef]
- Shorten, R.; Leith, D.; Foy, J.; Kilduff, R. Towards an analysis and design framework for congestion control in communication networks. In 12th Yale Workshop on Adaptive & Learning Systems; Yale University: New Haven, CT, USA, 2003. [Google Scholar]
- Jadbabaie, A.; Lin, J.; Morse, A.S. Coordination of groups of mobile autonomous agents using nearest neighbor rules. IEEE Trans. Autom. Control 2003, 48, 988–1001. [Google Scholar] [CrossRef]
- Kaczorek, T. The choice of the forms of Lyapunov functions for a positive 2D Roesser model. Int. J. Appl. Math. Comput. Sci. 2007, 17, 471–475. [Google Scholar] [CrossRef]
- Margaliot, M.; Branicky, M.S. Nice reachability for planar bilinear control systems with applications to planar linear switched systems. IEEE Trans. Autom. Control 2009, 54, 1430–1435. [Google Scholar] [CrossRef]
- Xiang, M.; Xiang, Z.R. Stability, L1-gain and control synthesis for positive switched systems with time-varying delay. Nonlinear Anal. Hybrid Syst. 2013, 9, 9–17. [Google Scholar] [CrossRef]
- Zhao, X.D.; Zhang, L.X.; Shi, P.; Liu, M. Stability of switched positive linear systmes with average dwell time switching. Automatica 2012, 48, 1132–1137. [Google Scholar] [CrossRef]
- Zhang, J.; Han, Z.; Zhu, F.; Huang, J. Stability and stabilization of positive switched systems with mode-dependent average dwell time. Nonlinear Anal. Hybrid Syst. 2013, 9, 42–55. [Google Scholar] [CrossRef]
- Zhao, X.D.; Zhang, L.X.; Shi, P. Stability of a class of switched positive linear time-delay systems. Int. J. Robust Nonlinear Control 2013, 23, 578–589. [Google Scholar] [CrossRef]
- Liu, S.L.; Xiang, Z.R. Exponential L1 output tracking control for positive switched linear systems with time-varying delays. Nonlinear Anal. Hybrid Syst. 2014, 11, 118–128. [Google Scholar] [CrossRef]
- Liu, X.W.; Dang, C.Y. Stability analysis of positive switched linear systems with delays. IEEE Trans. Autom. Control 2011, 56, 1684–1690. [Google Scholar] [CrossRef]
- Xiang, M.; Xiang, Z.R. Finite-time L1 control for positive switched linear systems with time-varying delay. Commun. Nonlinear Sci. Numer. Simul. 2013, 18, 3158–3166. [Google Scholar] [CrossRef]
- Chen, G.P.; Yang, Y. Finite-time stability of switched positive linear systems. Int. J. Robust Nonlinear Control 2014, 24, 179–190. [Google Scholar] [CrossRef]
- Liu, L.; Cao, X.; Fu, Z.; Song, S. Input-Output Finite-Time Control of Positive Switched Systems with Time-Varying and Distributed Delays. J. Control Sci. Eng. 2017, 2017. [Google Scholar] [CrossRef]
- Huang, S.P.; Karimi, H.R.; Xiang, Z.R. Input-output finite-time stability of positive switched linear systems with state delays. In Proceedings of the 2013 9th Asian Control Conference (ASCC), Istanbul, Turkey, 23–26 June 2013. [Google Scholar]
- Amato, F.; Ambrosino, R.; Cosentino, C.; Tommasi, G.D. Finite-time stabilization of impulsive dynamical linear systems. Nonlinear Anal. Hybrid Syst. 2011, 5, 89–101. [Google Scholar] [CrossRef]
- Xiang, W.M.; Xiao, J.; Xiao, C.Y. Finite-time stability analysis for switched linear systems. In Proceedings of the 23rd Chinese Control and Decision Conference, Mainyang, China, 23–25 May 2011; pp. 3115–3120. [Google Scholar]
- Shen, Y.J. Finite-time control of linear parameter-varying systems with normbounded exogenous disturbance. Control Theory Appl. 2008, 6, 184–188. [Google Scholar] [CrossRef]
- Hong, Y.G.; Jiang, Z.P.; Feng, G. Finite-time input-to-state stability and application to finite-time control design. SIAM J. Control Optim. 2010, 48, 4395–4418. [Google Scholar] [CrossRef]
- Amato, F.; Ambrosino, R.; Ariola, M.; Tommasi, G.D. Robust finite-time stability of impulsive dynamical linear systems subject to norm-bounded uncertainties. Int. J. Robust Nonlinear Control 2011, 21, 1082–1092. [Google Scholar] [CrossRef]
- Huang, S.P.; Xiang, Z.R.; Karimi, H.R. Input-Output Finite-Time Stability of Discrete-Time Impulsive Switched Linear Systems with State Delays. Circuits Syst. Signal Process. 2014, 33, 141–158. [Google Scholar] [CrossRef]
- Amato, F.; Ambrosino, R.; Cosentino, C.; Tommasi, G.D. Input-output finite time stabilization of linear systems. Automatica 2010, 46, 1558–1562. [Google Scholar] [CrossRef]
- Amato, F.; Carannante, G.; Tommasi, G.D. Input-output finite-time stability of a class of hybrid systems via static output feedback. Int. J. Control 2011, 84, 1056–1066. [Google Scholar] [CrossRef]
- Zhang, L.; Gao, H. Asynchronously switched control of switched linear systems with acerage dwell time. Automatica 2010, 46, 953–958. [Google Scholar] [CrossRef]
- Niu, B.; Zhao, J. Stabilization and L2-gain analysis for a class of cascade switched nonlinear systems: An average dwell-time method. Nonlinear Anal. Hybrid Syst. 2011, 5, 671–680. [Google Scholar] [CrossRef]
- Ames, A.D.; Zheng, H.; Gregg, R.; Sastry, S. Is there life after Zero? Taking executions past the breaking (Zeno) point. In Proceedings of the 2006 American Control Conference, Minneapolis, MN, USA, 14–16 June 2006. [Google Scholar]
- Wang, T.; Zhang, Q.; Niu, M.Z. Optimal switching law design of periodic switching systems based on mode-dependent average dwell time. In Proceedings of the 35th Chinese Control Conference, Chengdu, China, 27–29 July 2016. [Google Scholar]
- Amato, F.; Tommasi, G.D.; Pironti, A. Input-output finite-time stabilization of impulsive linear systems: Necessary and sufficient conditions. Nonlinear Anal. Hybrid Syst. 2016, 19, 93–106. [Google Scholar] [CrossRef]
- Zhao, X.; Zhang, L.; Shi, P.; Liu, M. Stability and Stabilization of switched linear systems with mode-dependent average dwell time. IEEE Trans. Autom. Control 2012, 57, 1809–1815. [Google Scholar] [CrossRef]
- Wang, F.Y. Control 5.0: From Newton to Merton in Popper’s Cyber-Social-Physical Spaces. IEEE/CAA J. Autom. Sin. 2016, 3, 233–234. [Google Scholar]





© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, L.; Li, J. Input–Output Finite Time Stabilization of Time-Varying Impulsive Positive Hybrid Systems under MDADT. Appl. Sci. 2017, 7, 1187. https://doi.org/10.3390/app7111187
Yao L, Li J. Input–Output Finite Time Stabilization of Time-Varying Impulsive Positive Hybrid Systems under MDADT. Applied Sciences. 2017; 7(11):1187. https://doi.org/10.3390/app7111187
Chicago/Turabian StyleYao, Lihong, and Junmin Li. 2017. "Input–Output Finite Time Stabilization of Time-Varying Impulsive Positive Hybrid Systems under MDADT" Applied Sciences 7, no. 11: 1187. https://doi.org/10.3390/app7111187
APA StyleYao, L., & Li, J. (2017). Input–Output Finite Time Stabilization of Time-Varying Impulsive Positive Hybrid Systems under MDADT. Applied Sciences, 7(11), 1187. https://doi.org/10.3390/app7111187