Bio-Inspired Real-Time Prediction of Human Locomotion for Exoskeletal Robot Control

Abstract
1. Introduction
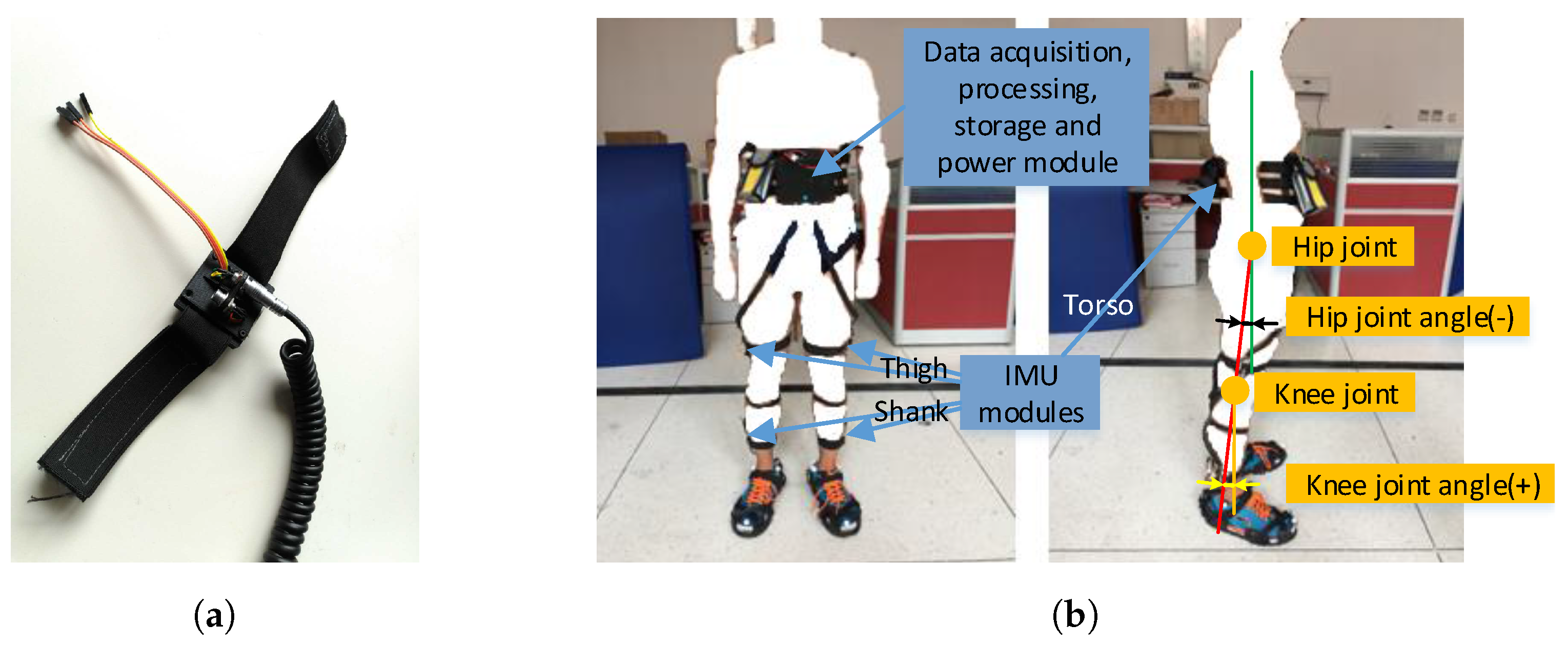
2. The IMU-Based Motion Capture System
3. Methods
3.1. Takens’ Reconstruction Prediction and Modifications Based on Motion Smoothness
3.2. Takens’ Reconstruction Method’s Synergy Improvement
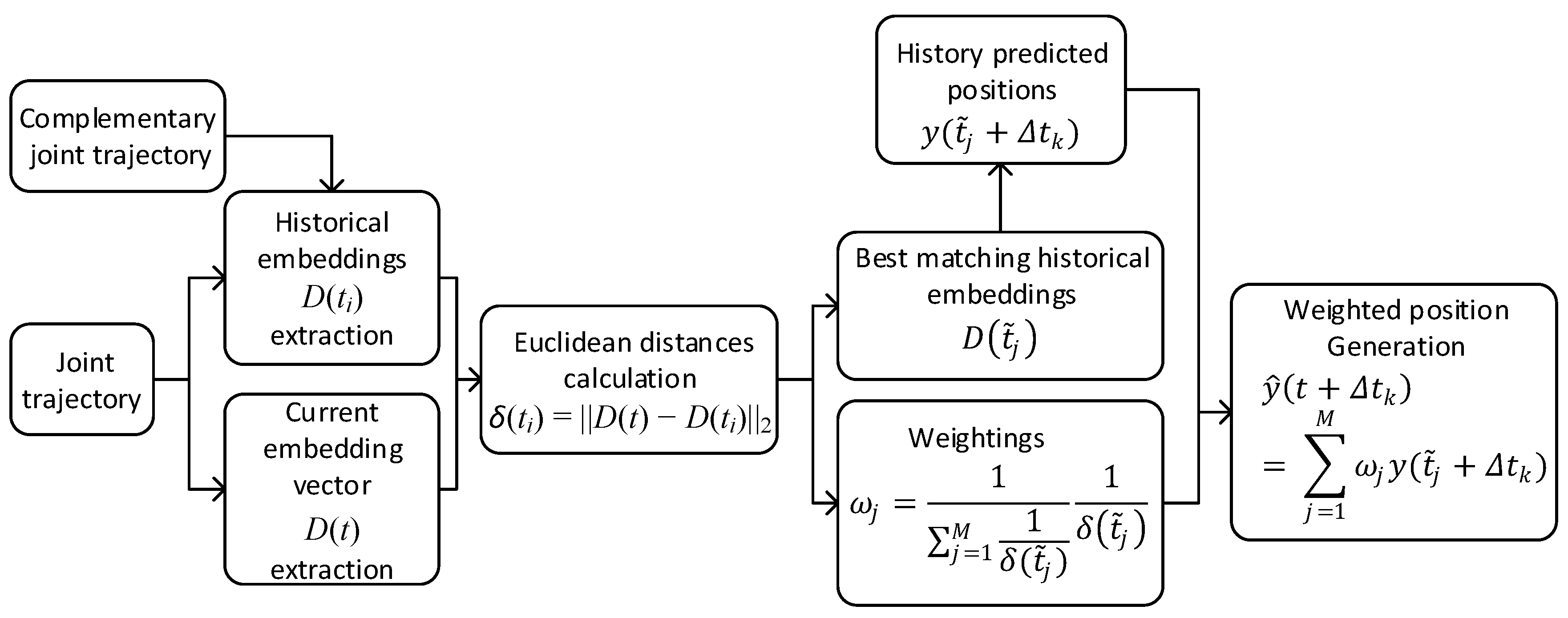
- While searching for the best matching vectors, the embedding vectors are generated with the united source of the two joints’ history data. The detailed process is shown in Figure 4.
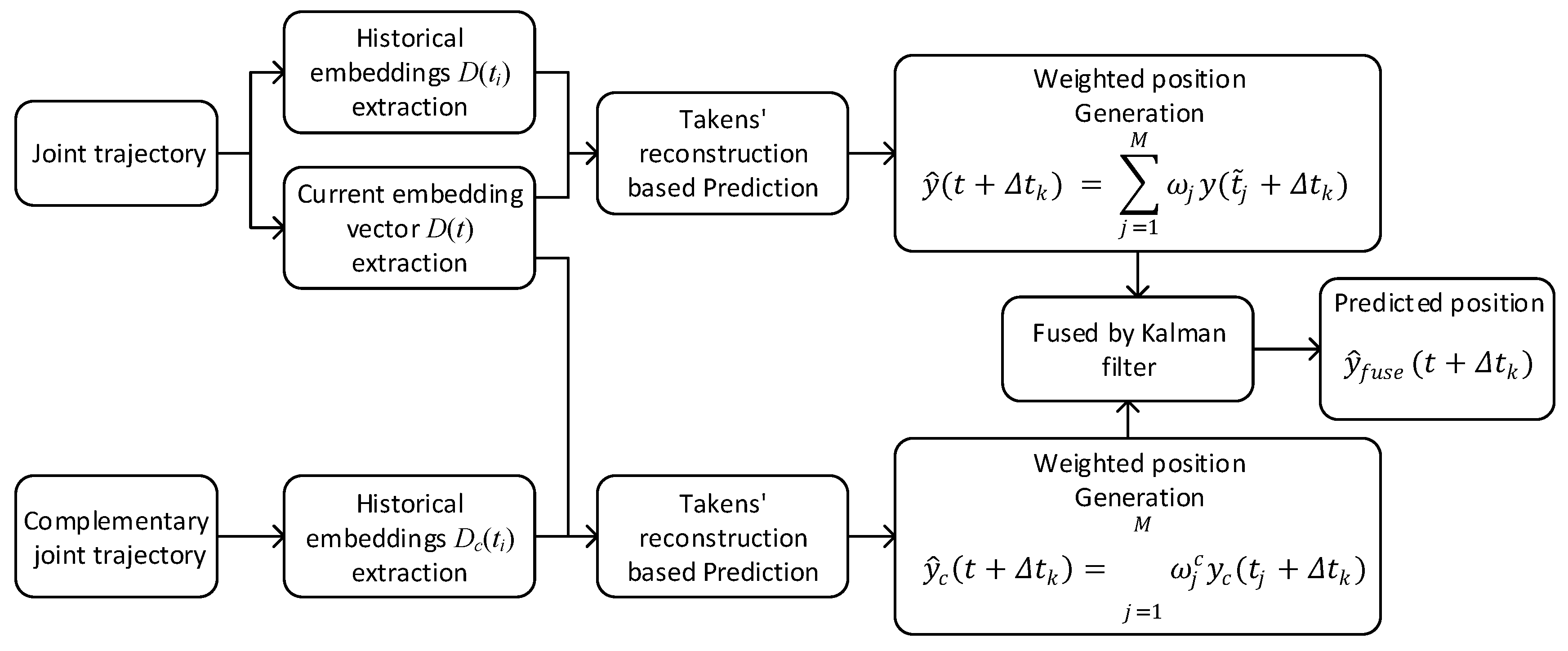
- Predict k step position ahead as usual and get . Then take the complementary joint as the source of embedding vector generation and predict . Finally, fuse and with the Kalman filter and obtain . The detailed process is shown in Figure 5.
3.3. Takens’ Reconstruction Adaptability Enhancement with Newton’s Method
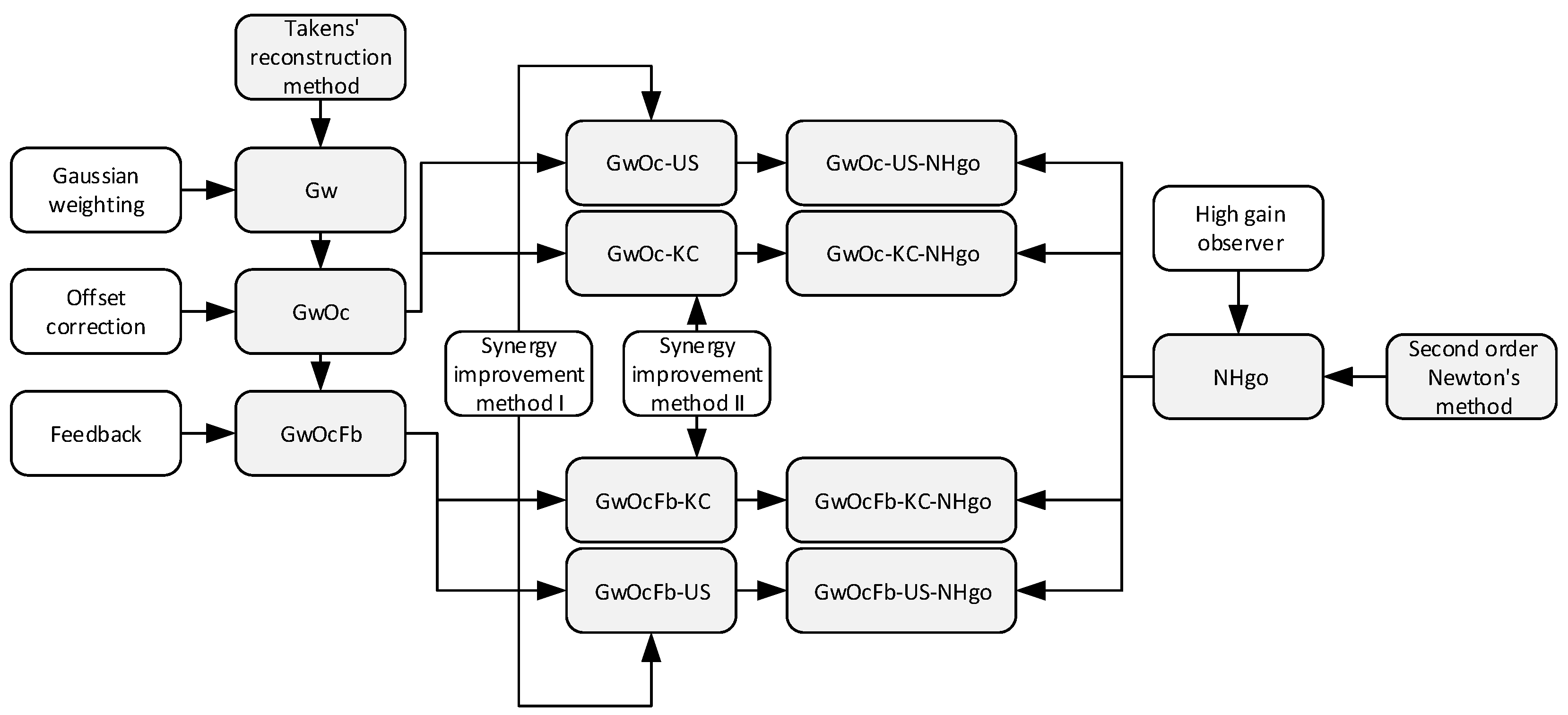
3.4. Methods Summary
3.5. Assessment Data
3.6. Assessment Measures
4. Implementation and Assessment
4.1. Parameter Selection for Takens’ Reconstruction-Based Methods
4.2. Results and Assessment
- It can seen more clearly in Figure 11 that when compared with the original Takens’ reconstruction method, the and values of Gw and GwOC had significant improvements, especially during the lower prediction horizon range, which meant the Gaussian weighting and offset correction were effective and the assumption of smoothness and consistency of human motion was reasonable.
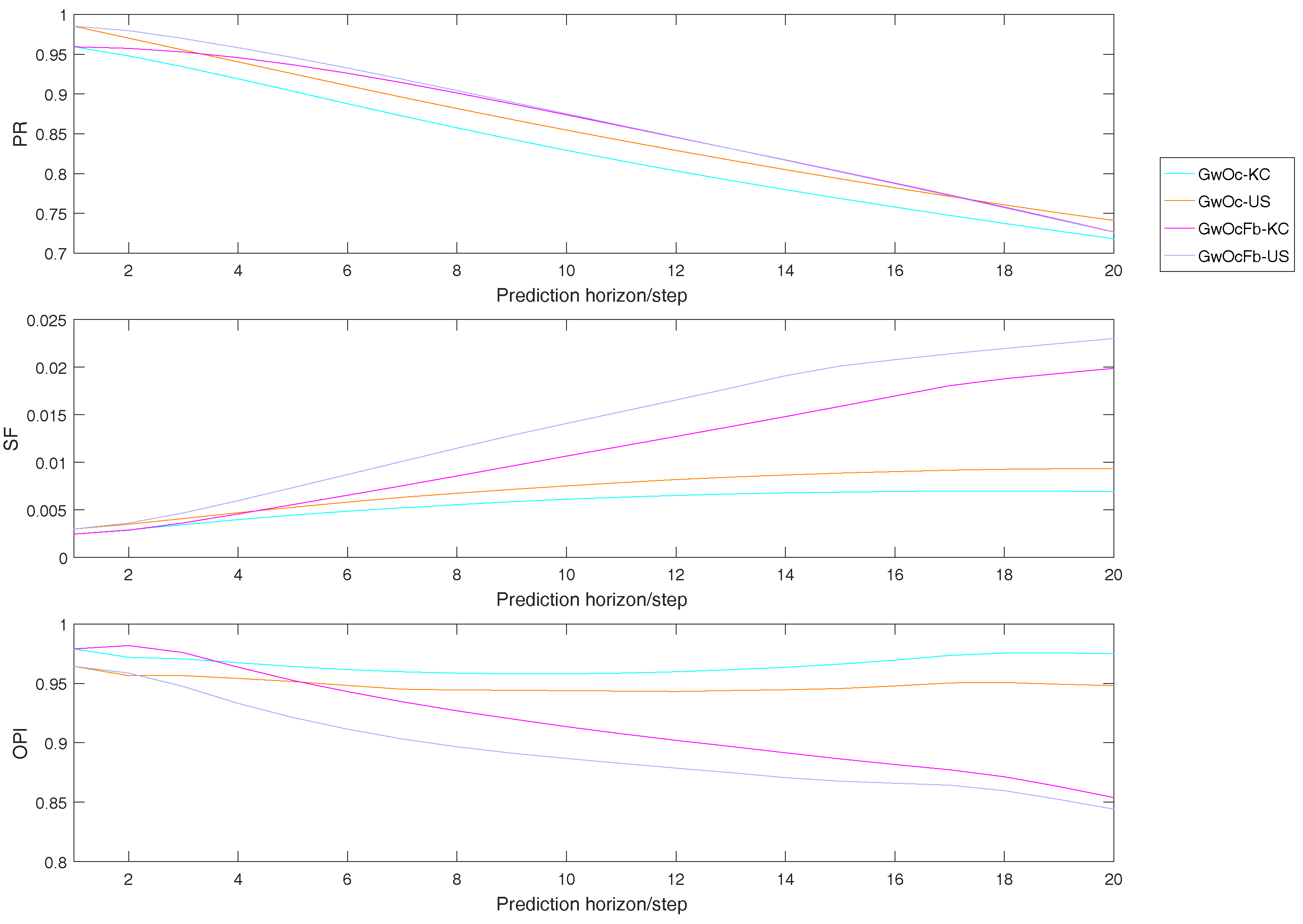
- Also, it can be inferred by comparing GwOc, GwOc-KC, and GwOc-US that for prediction accuracy the synergy improvement of united source of history embedding vector generation had a positive effect on smoothness improvement and a negative effect on accuracy. In contrast, the improvement of Kalman fusion with complementary joint prediction played an opposite role. Hence, the two synergy improvements would be chosen based on application preference.
- Figure 11, Figure 12 and Figure 13 show that feedback scheme would push up the value and hold back the value. The curves of the methods with feedback scheme deviated a lot from the other methods with the extension of the prediction horizon. This was always true by comparative inspection. Hence, if prediction accuracy is expected with highest priority, the feedback scheme should be considered.
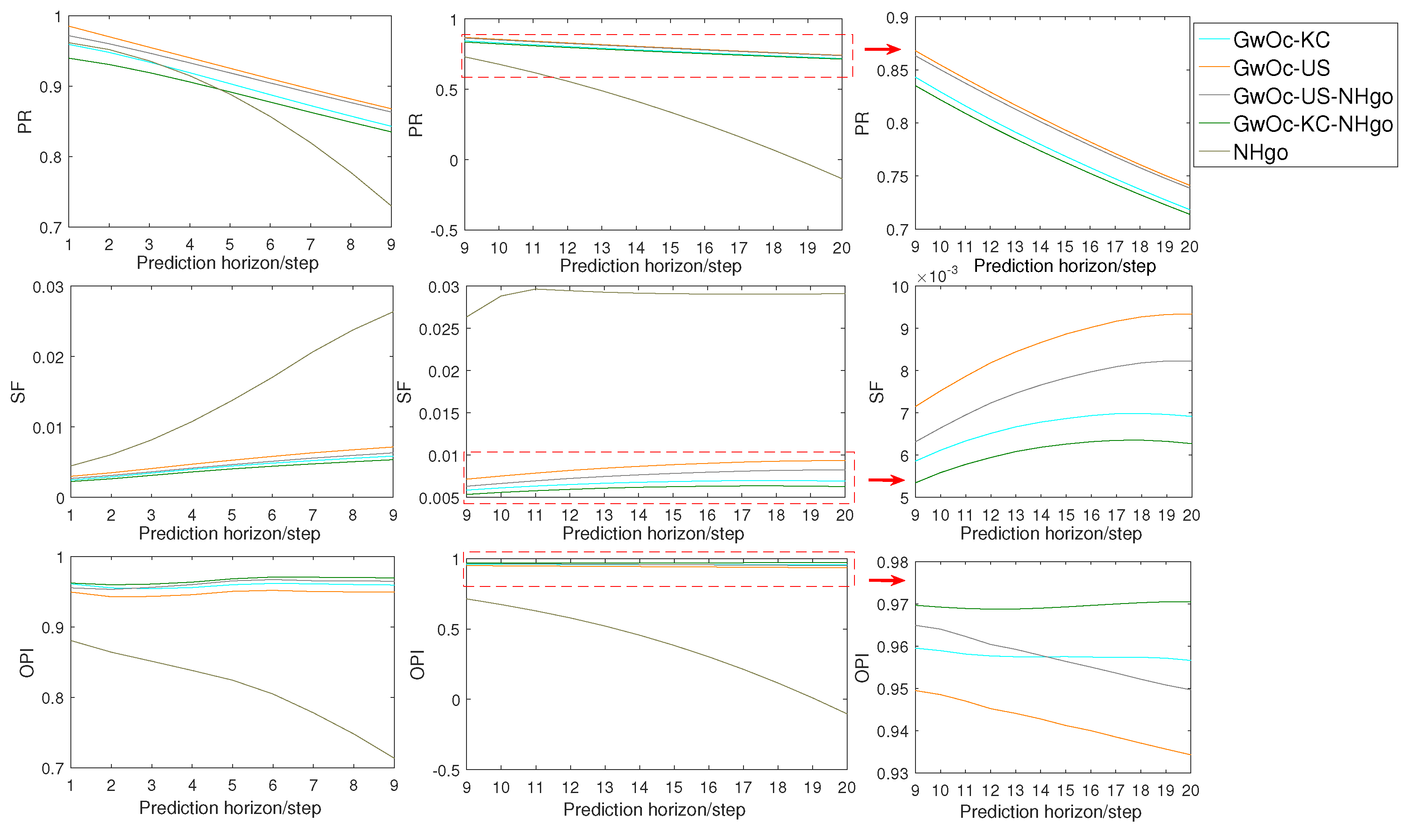
- In Figure 14, initially in the prediction horizon range of 1–3, the Newton’s method with a high-gain observer had a medium accuracy and also adequate smoothness, but after 3, the Newton’s method-based predictions degraded the fastest in both accuracy and smoothness. Meanwhile, for Takens’ reconstruction-based methods, the curves changed moderately. The NHgo-fused methods, GwOC-US-NHgo and GwOC-US-NHgo, exhibited a slight drop in values compared to the methods without fusion, but the smoothness was more elevated. As a result, their overall performance was increased.
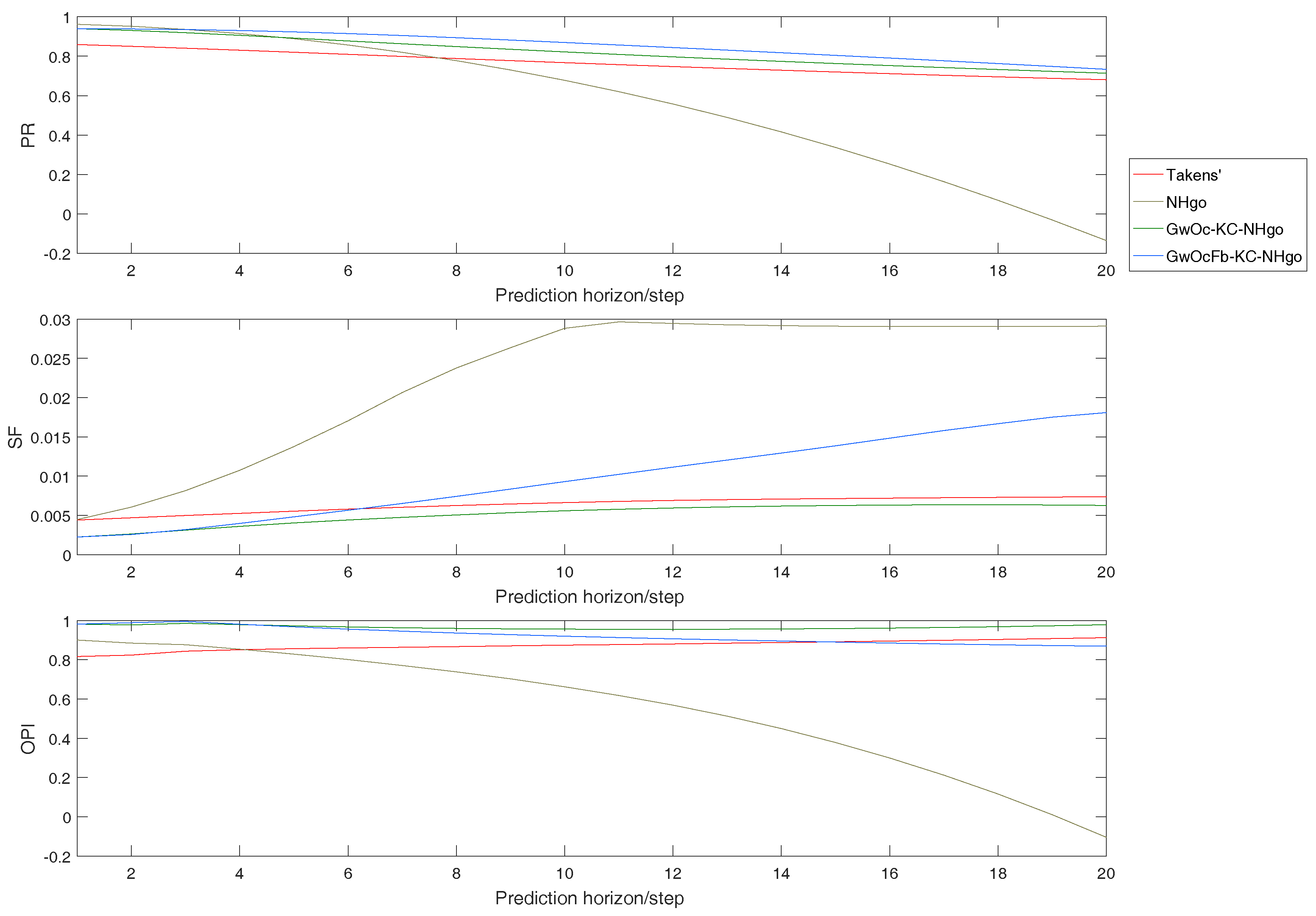
- By observing Figure 15 for short-term prediction such as in steps 1–3, the basic Takens’ reconstruction method’s performance was unsatisfactory, but its value rose gradually, which meant its relative performance over other methods increased. The curve with the KC-NHgo method changed gradually from an descending trend to ascending, which meant it was superior to other methods with respect to an extended prediction horizon. Considering the values with designed weighting, the fully improved method, GwOc-KC-NHgo, was apparently better across the prediction horizon range. The values are relative criterion and are significantly affected by the weighting value. If smoothness is preferred, the GwOc-KC-NHgo method is superior.
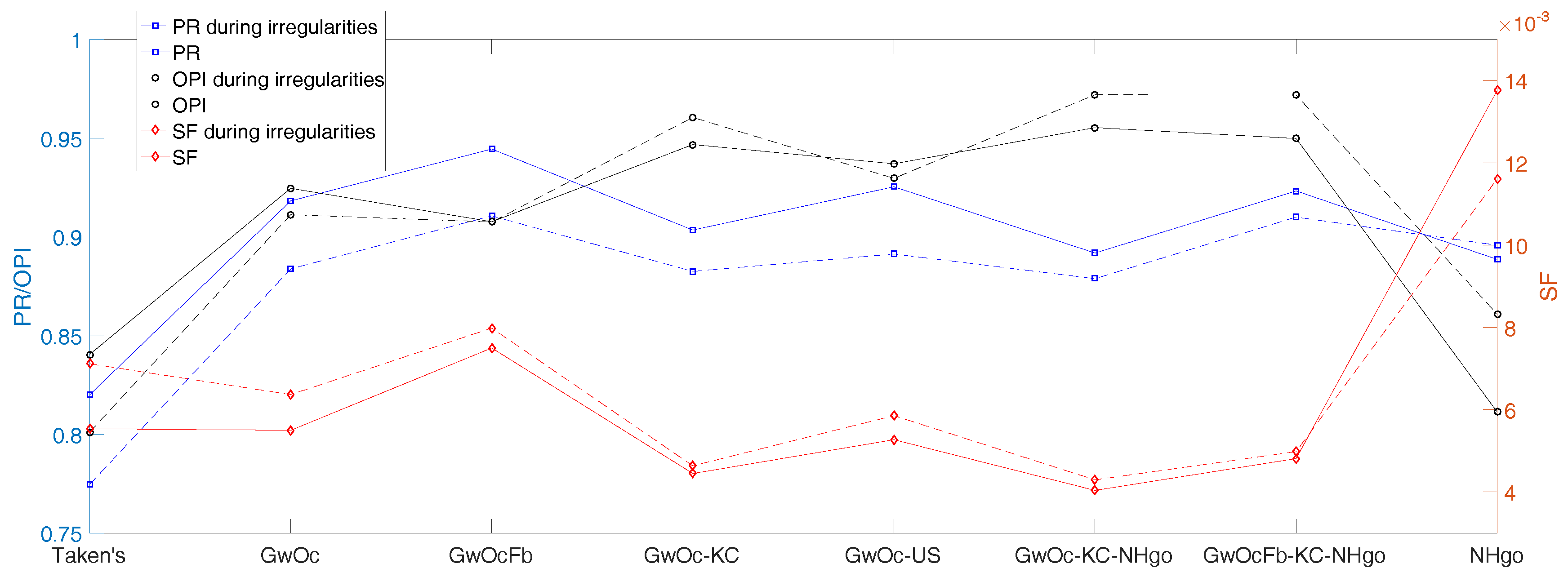
- The closing up of the assessment measure value gaps between the whole dataset and dataset during irregularities
- The improvement in the values’ changing trends.
- The signs of differences in assessment measure values between the whole dataset and dataset during irregularities.
4.3. Real-Time Demonstration
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Sheridan, T.B. Telerobotics. Automatica 1989, 25, 487–507. [Google Scholar] [CrossRef]
- Huang, L. Robotics Locomotion Control. Ph.D. Thesis, University of California, Berkeley, CA, USA, 2005. [Google Scholar]
- Novak, D.; Reberšek, P.; De Rossi, S.M.M.; Donati, M.; Podobnik, J.; Beravs, T.; Lenzi, T.; Vitiello, N.; Carrozza, M.C.; Munih, M. Automated detection of gait initiation and termination using wearable sensors. Med. Eng. Phys. 2013, 35, 1713–1720. [Google Scholar] [CrossRef] [PubMed]
- Kanjanapas, K.; Wang, Y.; Zhang, W.; Whittingham, L.; Tomizuka, M. A Human Motion Capture System Based on Inertial Sensing and a Complementary Filter. In Proceedings of the ASME 2013 Dynamic Systems and Control Conference on American Society of Mechanical Engineers, Palo Alto, CA, USA, 21–23 October 2013; p. V003T40A004. [Google Scholar]
- Wang, M.; Wu, X.; Liu, D.; Wang, C.; Zhang, T.; Wang, P. A human motion prediction algorithm for non-binding lower extremity exoskeleton. In Proceedings of the 2015 IEEE International Conference on Information and Automation, IEEE, Lijiang, China, 8–10 August 2015; pp. 369–374. [Google Scholar]
- Zhang, W.; Tomizuka, M.; Byl, N. A wireless human motion monitoring system for smart rehabilitation. J. Dyn. Syst. Meas. Control 2016, 138, 111004. [Google Scholar] [CrossRef]
- Lin, Y.; Min, H.; Wei, H. Inertial measurement unit-based iterative pose compensation algorithm for low-cost modular manipulator. Adv. Mech. Eng. 2016, 8. [Google Scholar] [CrossRef]
- Novak, D.; Riener, R. A survey of sensor fusion methods in wearable robotics. Robot. Auton. Syst. 2015, 73, 155–170. [Google Scholar] [CrossRef]
- Fleischer, C.; Hommel, G. A Human–Exoskeleton Interface Utilizing Electromyography. IEEE Trans. Robot. 2008, 24, 872–882. [Google Scholar] [CrossRef]
- Li, Z.; He, W.; Yang, C.; Qiu, S.; Zhang, L.; Su, C.Y. Teleoperation control of an exoskeleton robot using brain machine interface and visual compressive sensing. In Proceedings of the 2016 12th World Congress on Intelligent Control and Automation (WCICA), Guilin, China, 12–15 June 2016; pp. 1550–1555. [Google Scholar]
- Iqbal, S.; Zang, X.; Zhu, Y.; Saad, H.M.A.A.; Zhao, J. Nonlinear time-series analysis of different human walking gaits. In Proceedings of the 2015 IEEE International Conference on Electro/Information Technology (EIT), Dekalb, IL, USA, 21–23 May 2015; pp. 25–30. [Google Scholar]
- Pitkin, M.R. Effects of Design Variants in Lower-Limb Prostheses on Gait Synergy. JPO J. Prosthet. Orthot. 1997, 9, 113–122. [Google Scholar] [CrossRef] [PubMed]
- Senda, S.; Takata, N.; Tsujita, K. A study on lower limb’s joint synergy in human locomotion with physical constraints on the knee. In Proceedings of the 2012 IEEE/SICE International Symposium on System Integration (SII), Fukuoka, Japan, 16–18 December 2012; pp. 349–354. [Google Scholar]
- Sanzmerodio, D.; Cestari, M.; Arevalo, J.C.; Garcia, E. Exploiting joint synergy for actuation in a lower-limb active orthosis. Ind. Robot. Int. J. 2013, 40, 224–228. [Google Scholar] [CrossRef]
- Rosenblatt, N.J.; Latash, M.L.; Hurt, C.P.; Grabiner, M.D. Challenging gait leads to stronger lower-limb kinematic synergies: The effects of walking within a more narrow pathway. Neurosci. Lett. 2015, 600, 110–114. [Google Scholar] [CrossRef] [PubMed]
- Grimes, D.L.; Flowers, W.C.; Donath, M. Feasibility of an Active Control Scheme for Above Knee Prostheses. J. Biomech. Eng. 1977, 99, 215–221. [Google Scholar] [CrossRef]
- Vallery, H.; van Asseldonk, E.H.; Buss, M.; van der Kooij, H. Reference trajectory generation for rehabilitation robots: complementary limb motion estimation. IEEE Trans. Neural Syst. Rehabil. Eng. 2009, 17, 23–30. [Google Scholar] [CrossRef] [PubMed]
- Broer, H.; Takens, F. Reconstruction and time series analysis. In Dynamical Systems and Chaos; Springer: New York, NY, USA, 2011; pp. 205–242. [Google Scholar]
- Herrmann, C. Robotic Motion Compensation for Applications in Radiation Oncology. Ph.D. Thesis, University of Würzburg, Würzburg, Germany, 2013. [Google Scholar]
- Zhang, W.; Tomizuka, M.; Bae, J. Time series prediction of knee joint movement and its application to a network-based rehabilitation system. In Proceedings of the IEEE 2014 American Control Conference, Portland, OR, USA, 4–6 June 2014; pp. 4810–4815. [Google Scholar]
- Zhang, W.; Chen, X.; Bae, J.; Tomizuka, M. Real-time kinematic modeling and prediction of human joint motion in a networked rehabilitation system. In Proceedings of the 2015 American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015; pp. 5800–5805. [Google Scholar]
- Crowninshield, R.; Pope, M.H.; Johnson, R.; Miller, R. The impedance of the human knee. J. Biomech. 1976, 9, 529–535. [Google Scholar] [CrossRef]
- Yangming, X.; Hollerbach, J.M. Identification of human joint mechanical properties from single trial data. IEEE Trans. Biomed. Eng. 1998, 45, 1051–1060. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.Q.; Nuber, G.; Butler, J.; Bowen, M.; Rymer, W.Z. In vivo human knee joint dynamic properties as functions of muscle contraction and joint position. J. Biomech. 1997, 31, 71–76. [Google Scholar] [CrossRef]
- Andrea, T.; Marcello, M. A low-noise estimator of angular speed and acceleration from shaft encoder measurements. J. Autom. 2001, 42, 169–176. [Google Scholar]
- Ahrens, J.H.; Khalil, H.K. High-gain observers in the presence of measurement noise: A switched-gain approach. Automatica 2009, 45, 936–943. [Google Scholar] [CrossRef]
- Nicosia, S.; Tornambe, A. High-gain observers in the state and parameter estimation of robots having elastic joints. Syst. Control Lett. 1989, 13, 331–337. [Google Scholar] [CrossRef]
- Madgwick, S.O.H.; Harrison, A.J.L.; Vaidyanathan, R. Estimation of IMU and MARG orientation using a gradient descent algorithm. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; pp. 1–7. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Abbreviation | Method Description | Proposed by Author |
|---|---|---|
| Takens’ | Takens’ reconstruction method | No |
| NHgo | Newton’s method with velocity and acceleration observed by high gain observer | Yes |
| Gw | Takens’ reconstruction with Gaussian weightings | Yes |
| GwOc | Takens’ reconstruction with Gaussian weightings and offset correction scheme | Yes |
| GwOcFb | Takens’ reconstruction with Gaussian weightings, offset correction and feedback scheme | Yes |
| GwOcFb-KC | GwOcFb predicted result Kalman fusion with the complementary joint GwOcFb predicted | Yes |
| GwOcFb-US | GwOcFb with coupled joints’ united source of historical embedding generation | Yes |
| GwOc-KC | GwOc predicted result Kalman fusion with the complementary joint GwOc-KC predicted | Yes |
| GwOc-US | GwOc with coupled joints’ united source of historical embedding generation | Yes |
| GwOcFb-US-NHgo | GwOcFb-US predicted result Kalman fusion with the NHgo predicted | Yes |
| GwOc-US-NHgo | GwOcFb predicted result Kalman fusion with the NHgo predicted | Yes |
| GwOcFb-KC-NHgo | GwOcFb-KC predicted result Kalman fusion with the NHgo predicted | Yes |
| GwOc-KC-NHgo | GwOc-KC predicted result Kalman fusion with the NHgo predicted | Yes |
| Parameter Name | Symbol | Value | Variation Range | Variable |
|---|---|---|---|---|
| History data length | l | 360 | 200–400 | Yes |
| Embedding vector length | p | 20 | 6–20 | Yes |
| Number of weighted best matching vectors | M | 5 | 1–8 | Yes |
| Prediction horizon | k | 5 | / | No |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duan, P.; Li, S.; Duan, Z.; Chen, Y. Bio-Inspired Real-Time Prediction of Human Locomotion for Exoskeletal Robot Control. Appl. Sci. 2017, 7, 1130. https://doi.org/10.3390/app7111130
Duan P, Li S, Duan Z, Chen Y. Bio-Inspired Real-Time Prediction of Human Locomotion for Exoskeletal Robot Control. Applied Sciences. 2017; 7(11):1130. https://doi.org/10.3390/app7111130
Chicago/Turabian StyleDuan, Pu, Shilei Li, Zhuoping Duan, and Yawen Chen. 2017. "Bio-Inspired Real-Time Prediction of Human Locomotion for Exoskeletal Robot Control" Applied Sciences 7, no. 11: 1130. https://doi.org/10.3390/app7111130
APA StyleDuan, P., Li, S., Duan, Z., & Chen, Y. (2017). Bio-Inspired Real-Time Prediction of Human Locomotion for Exoskeletal Robot Control. Applied Sciences, 7(11), 1130. https://doi.org/10.3390/app7111130