Performance Evaluation of Submerged Floating Tunnel Subjected to Hydrodynamic and Seismic Excitations


Abstract
:1. Introduction
2. Governing Equations of Motion
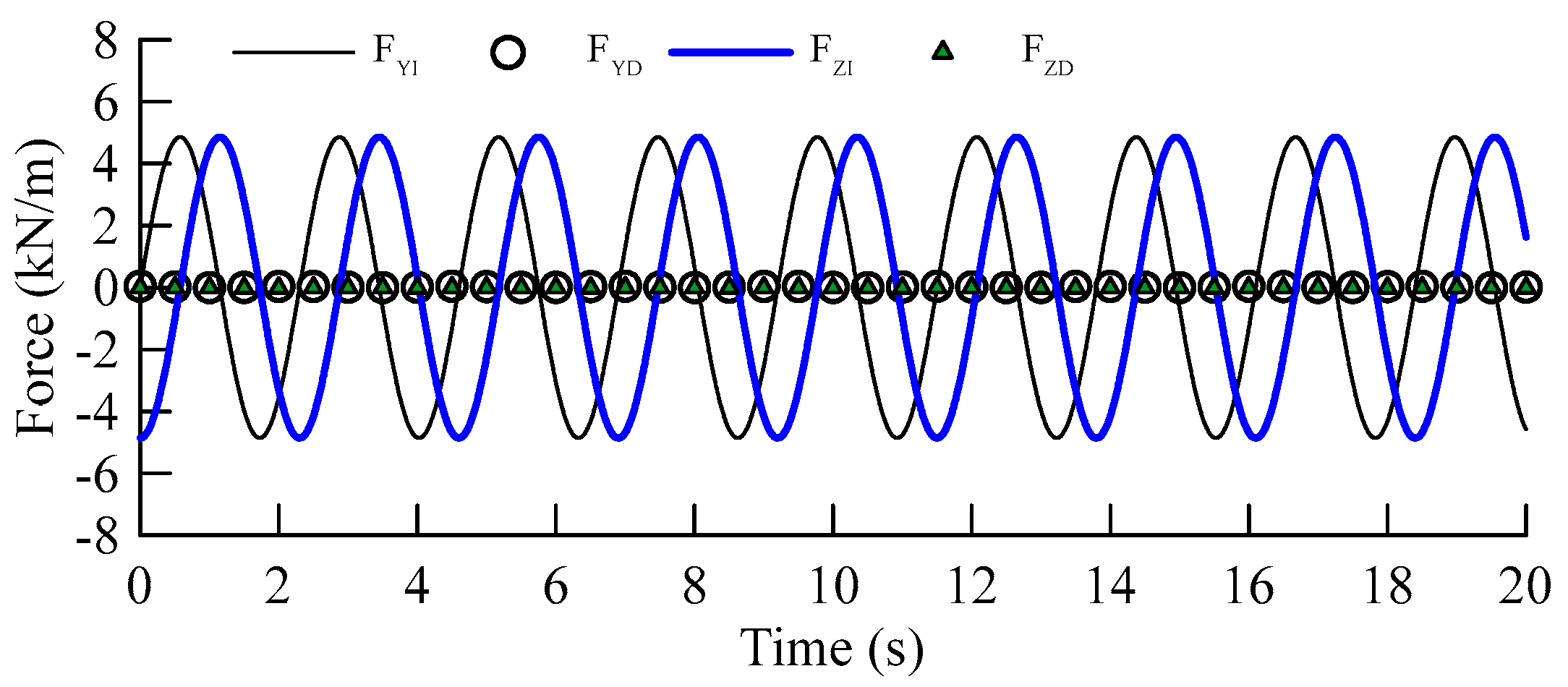
2.1. Modeling of Waves and Currents
2.2. Equations of Motion
3. Numerical Example
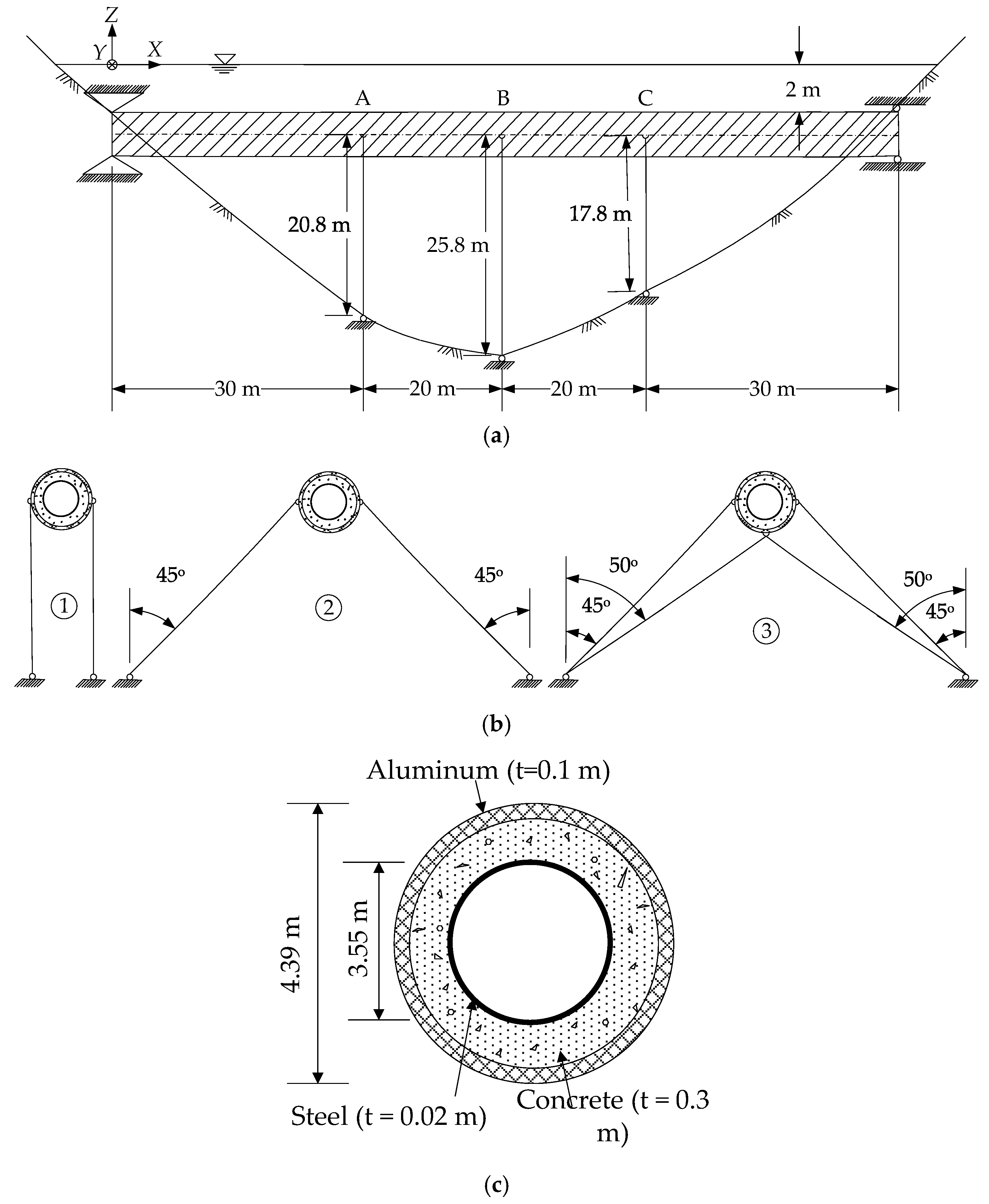
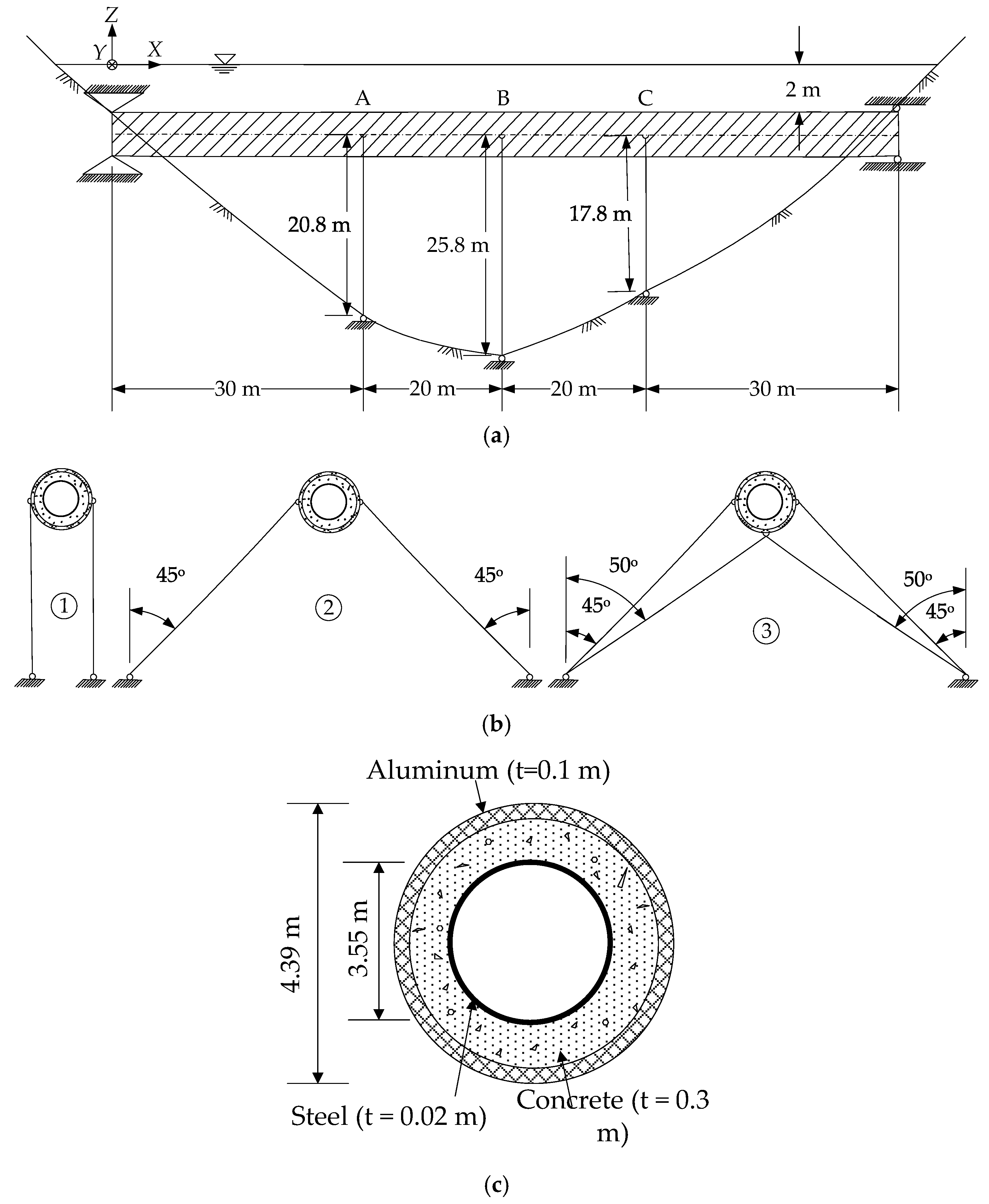
- The cross-section of the SFT is hollow circular, consisting of an external aluminum layer followed by a sandwiched concrete layer and internal steel layer. The material’s thicknesses and tunnel diameters are shown in Figure 2c. A uniformly-distributed load of 125 kN/m, per unit length, was used for the tunnel. The Archimedes buoyancy was 160 kN/m ( = 1050 × 10 × π × 4.42/4 = 160 kN/m), and the net residual buoyancy was 35 kN/m (160 − 125 = 35 kN/m). A uniformly-distributed live load of 10 kN/m was assumed to be acting on the tunnel;
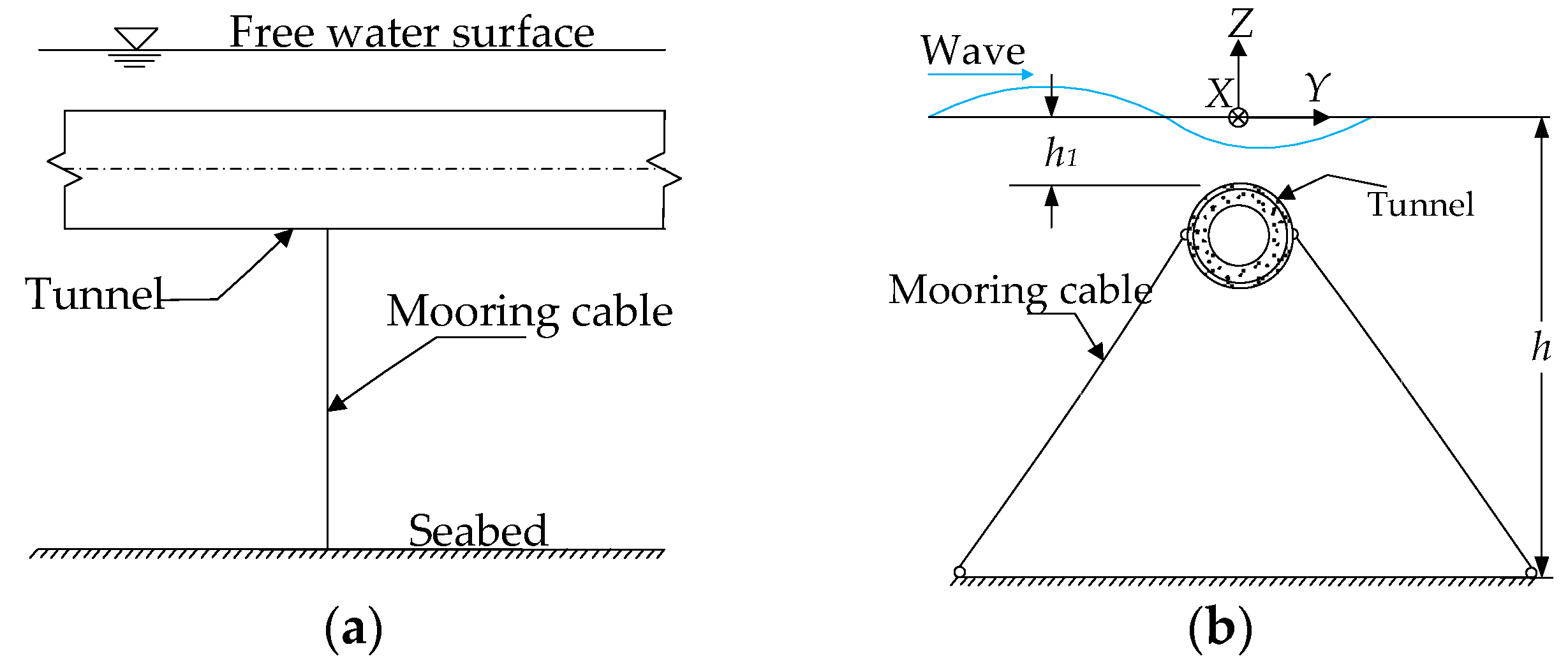
- The mooring cable connections at the anchor point (seabed) and tunnel were treated as pins; and
- The tunnel displacements were restrained at one end, while the axial displacement was left free at the other end. The flexural rotations were allowed at both ends of the tunnel.
4. Results
4.1. Hydrodynamic Response
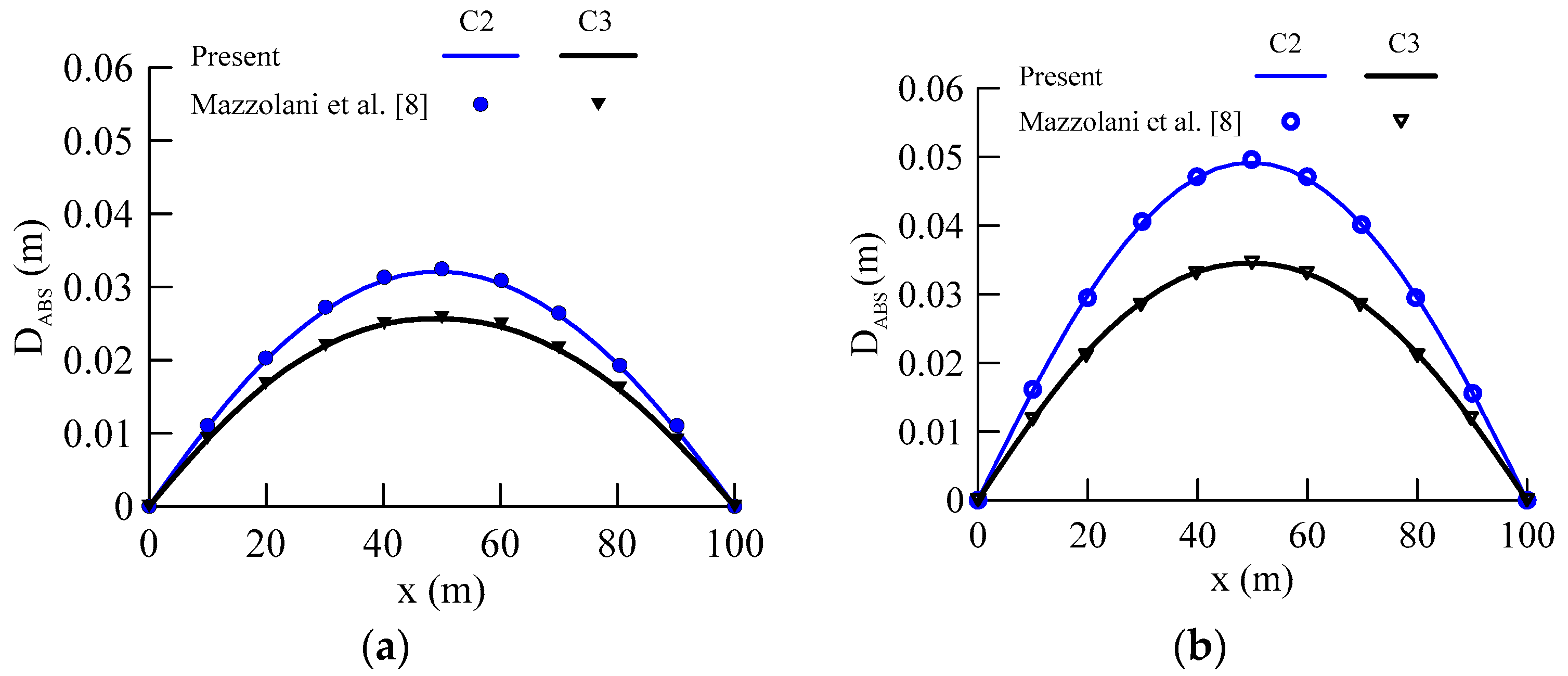
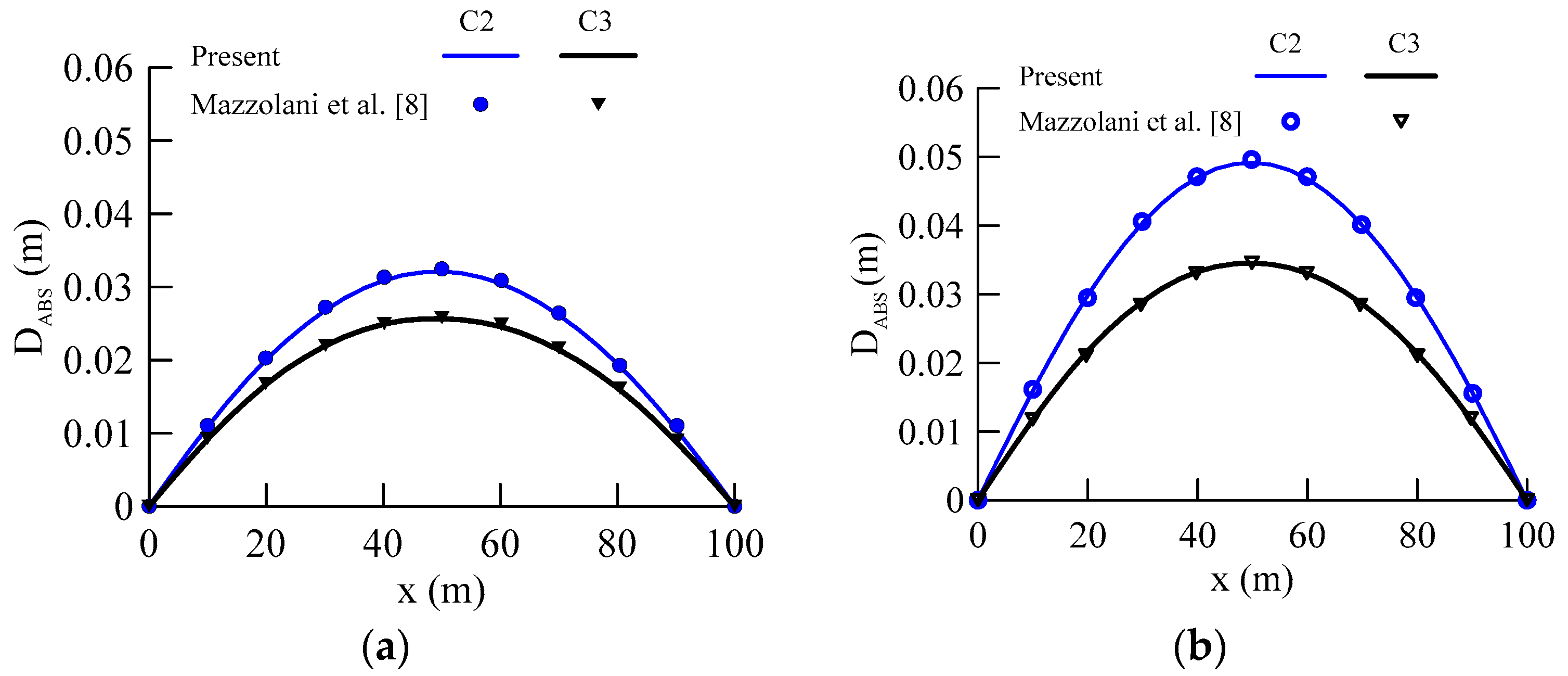
4.1.1. Verification of the Numerical Model
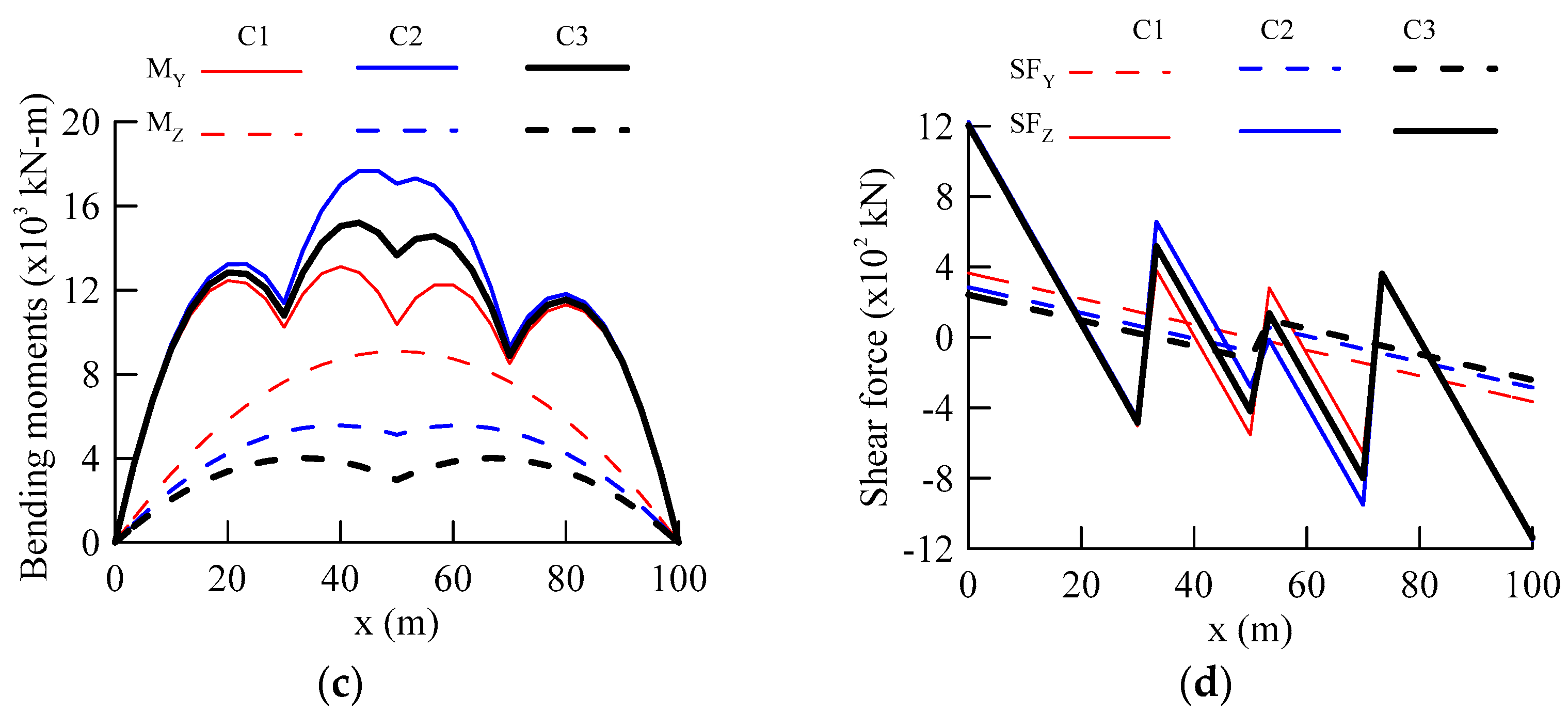
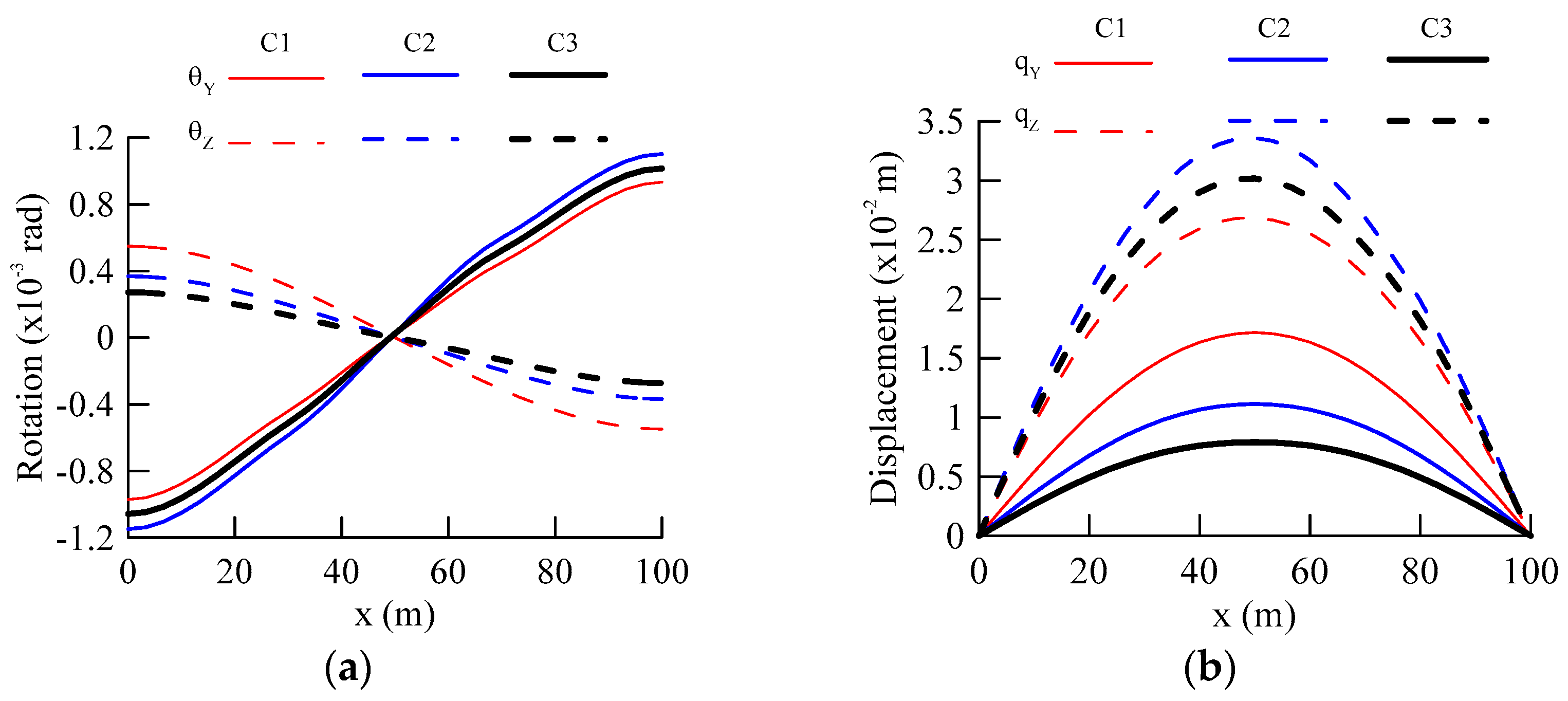
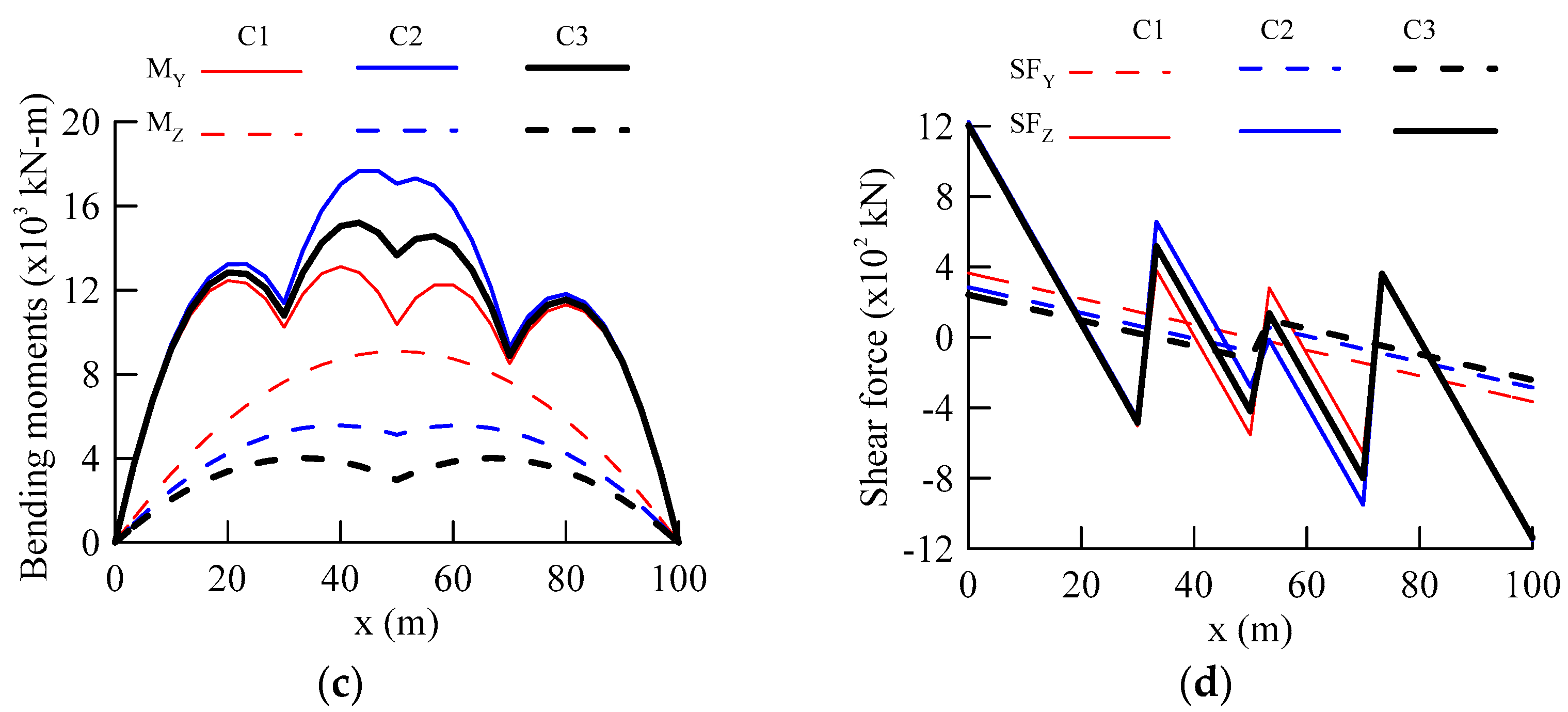
4.1.2. Static Response
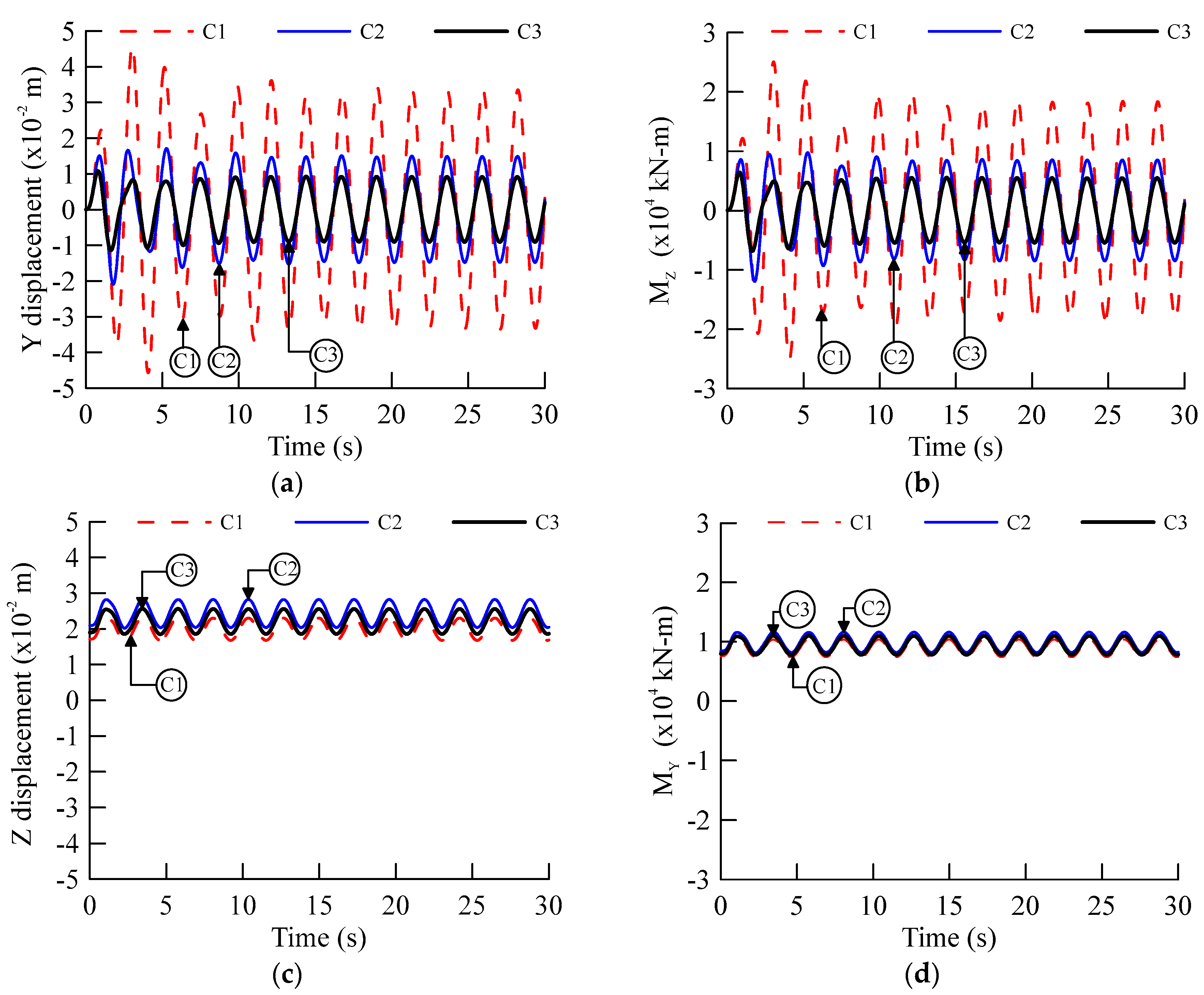
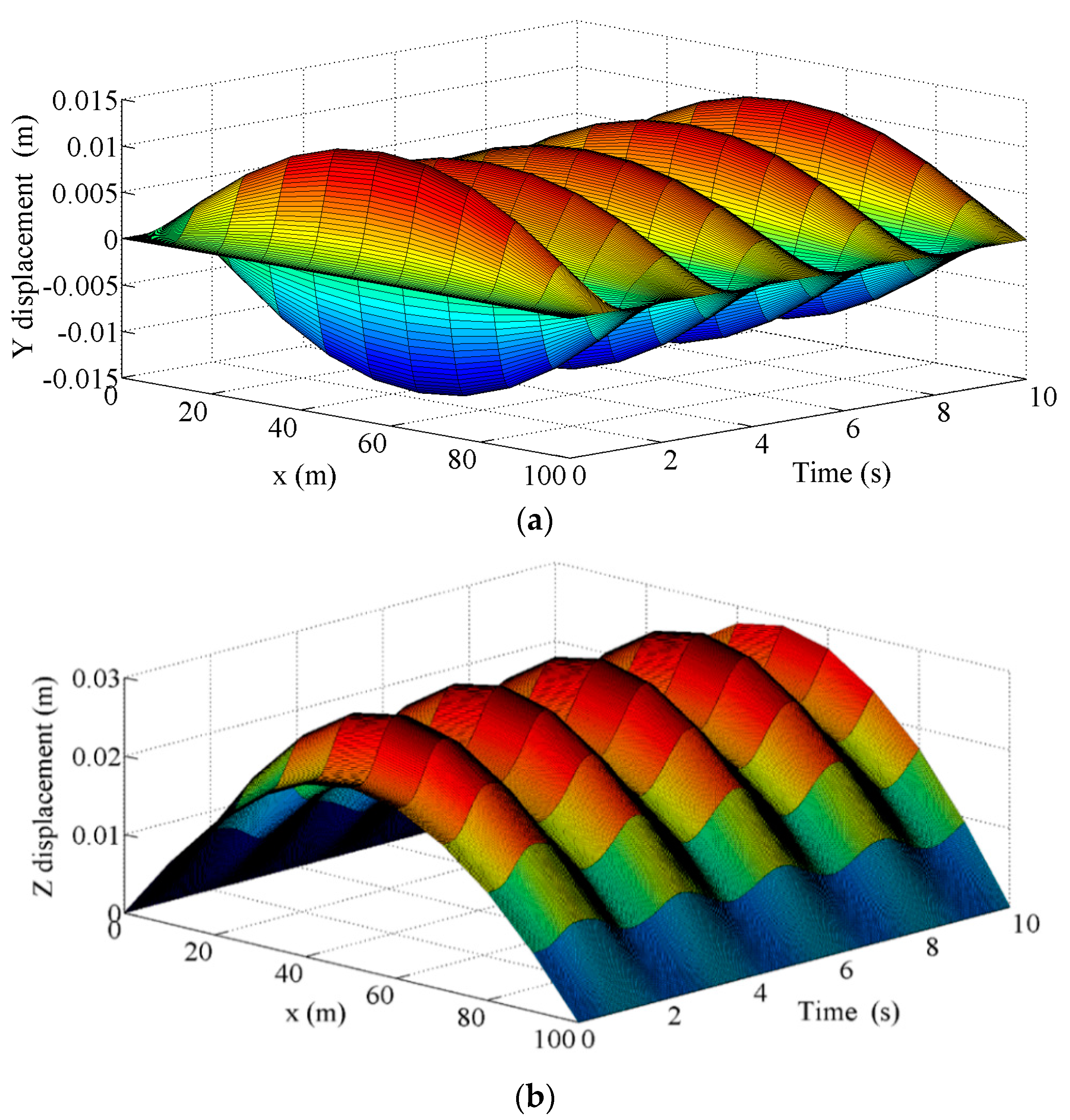
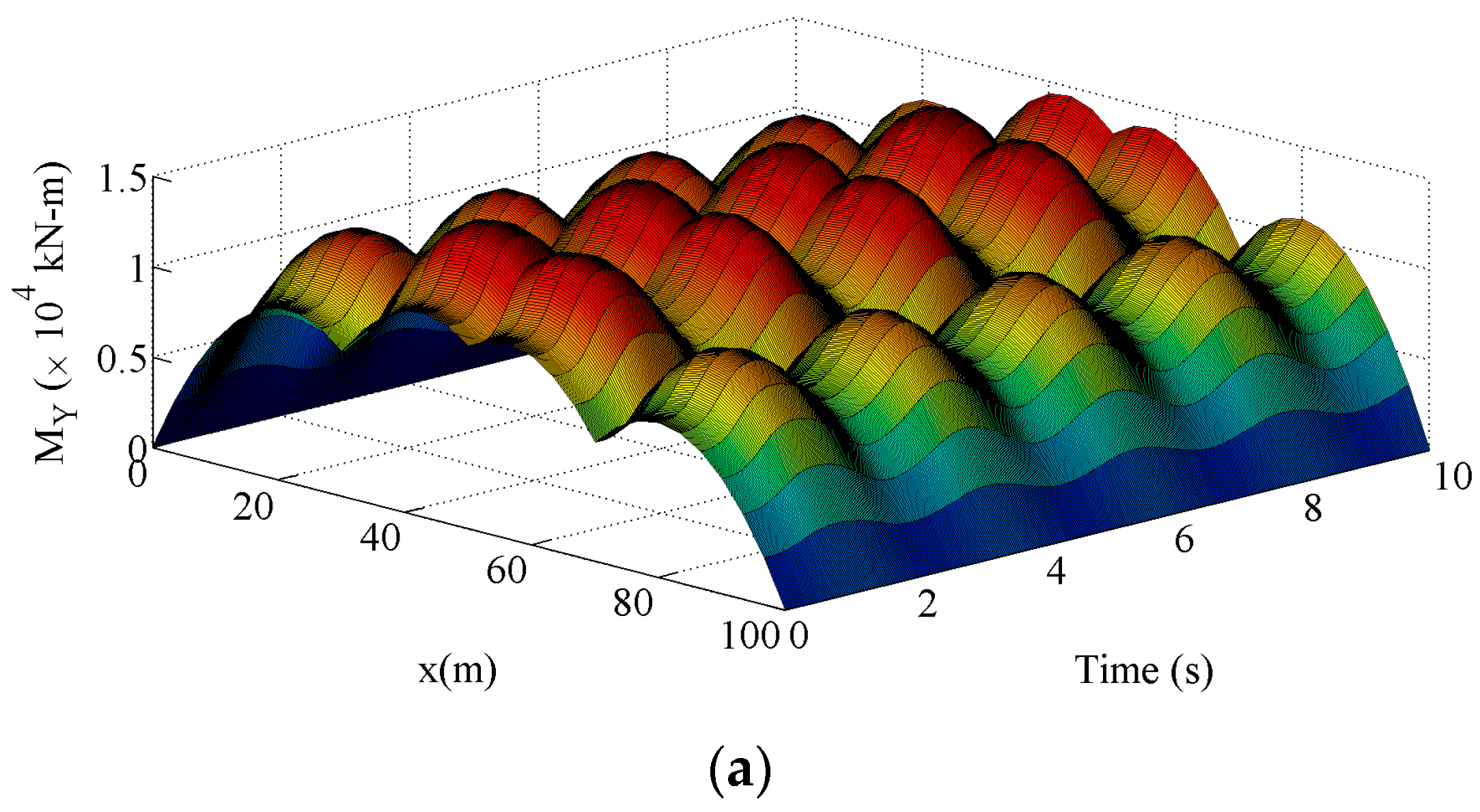
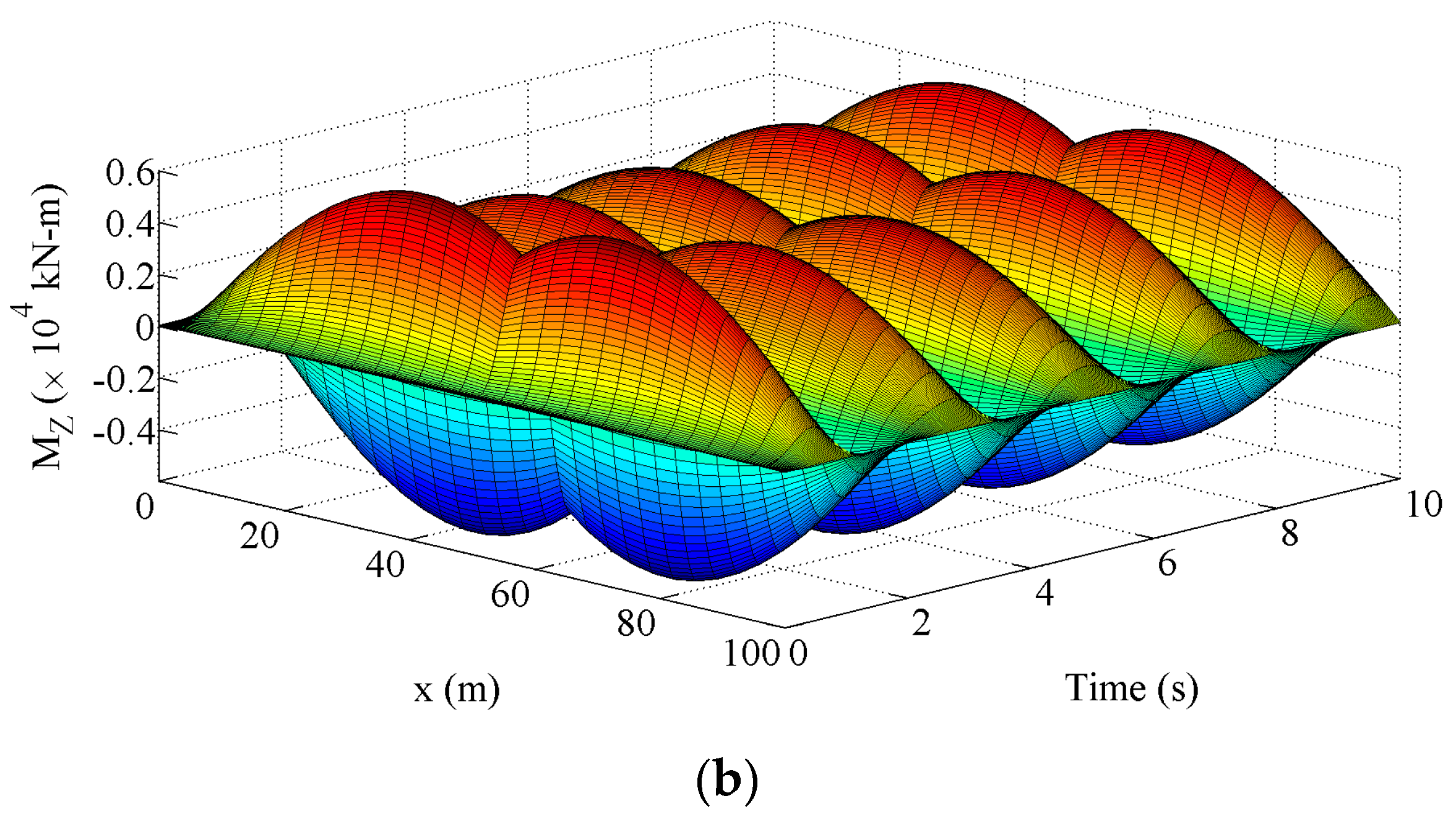
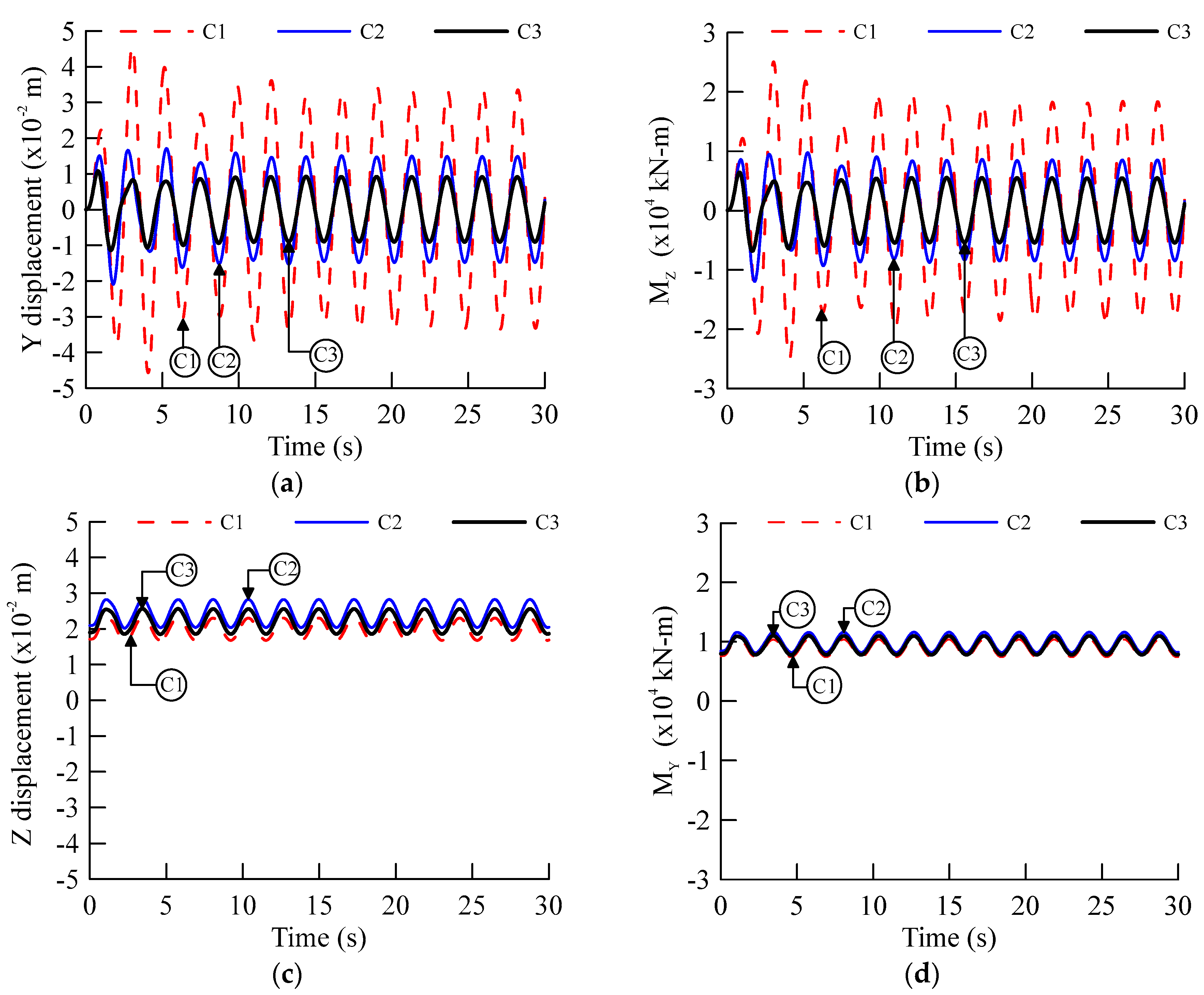
4.1.3. Dynamic Response
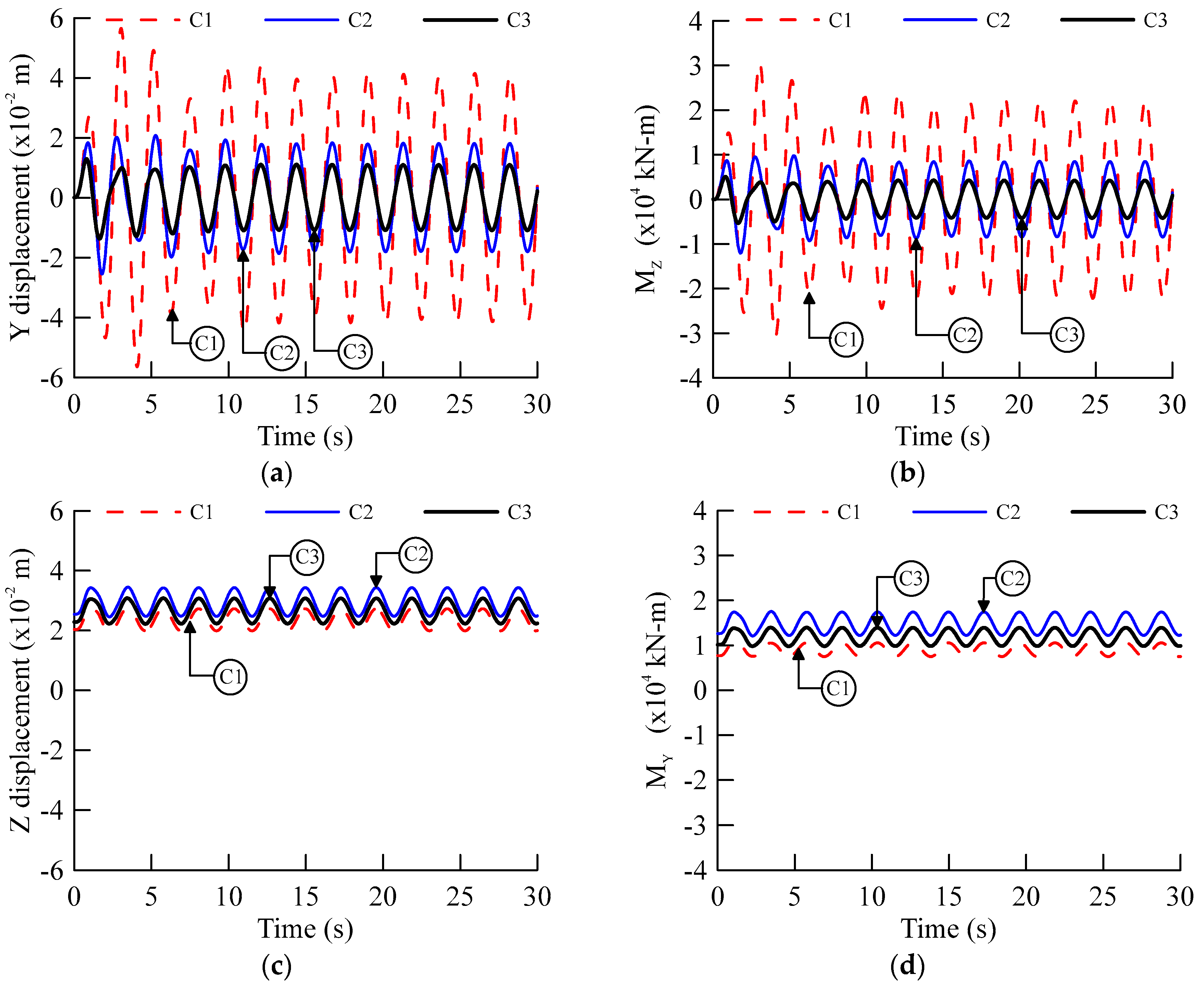
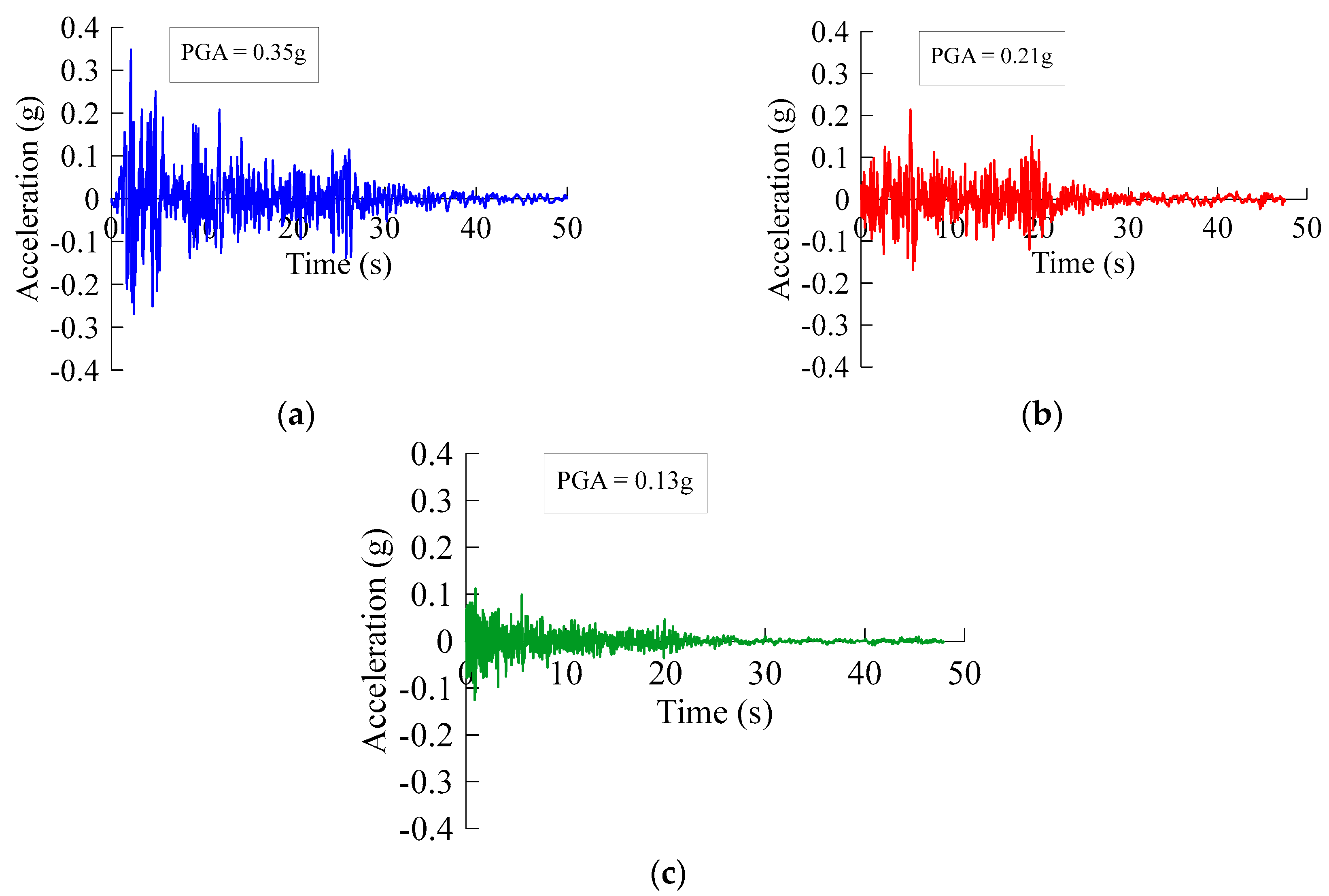
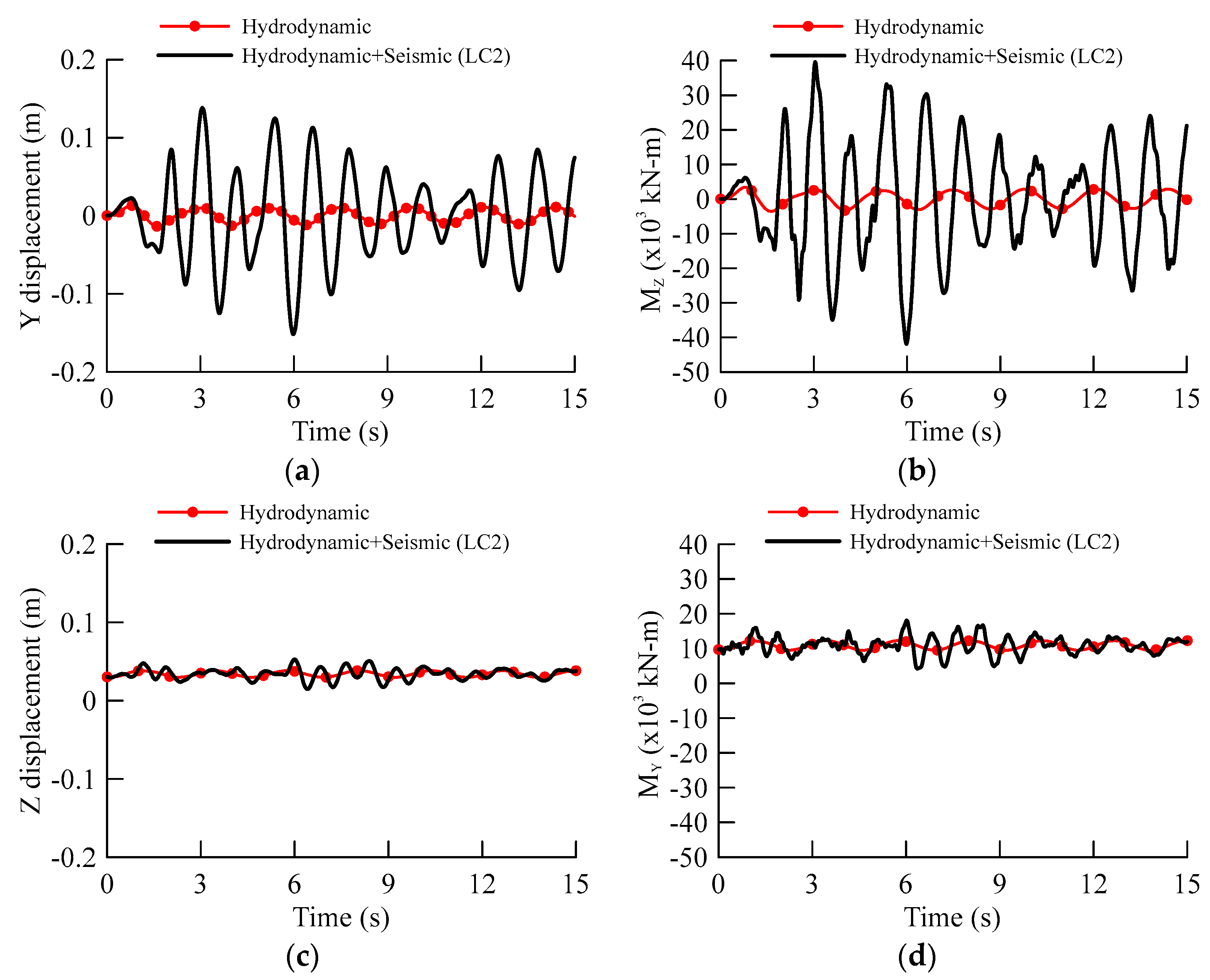
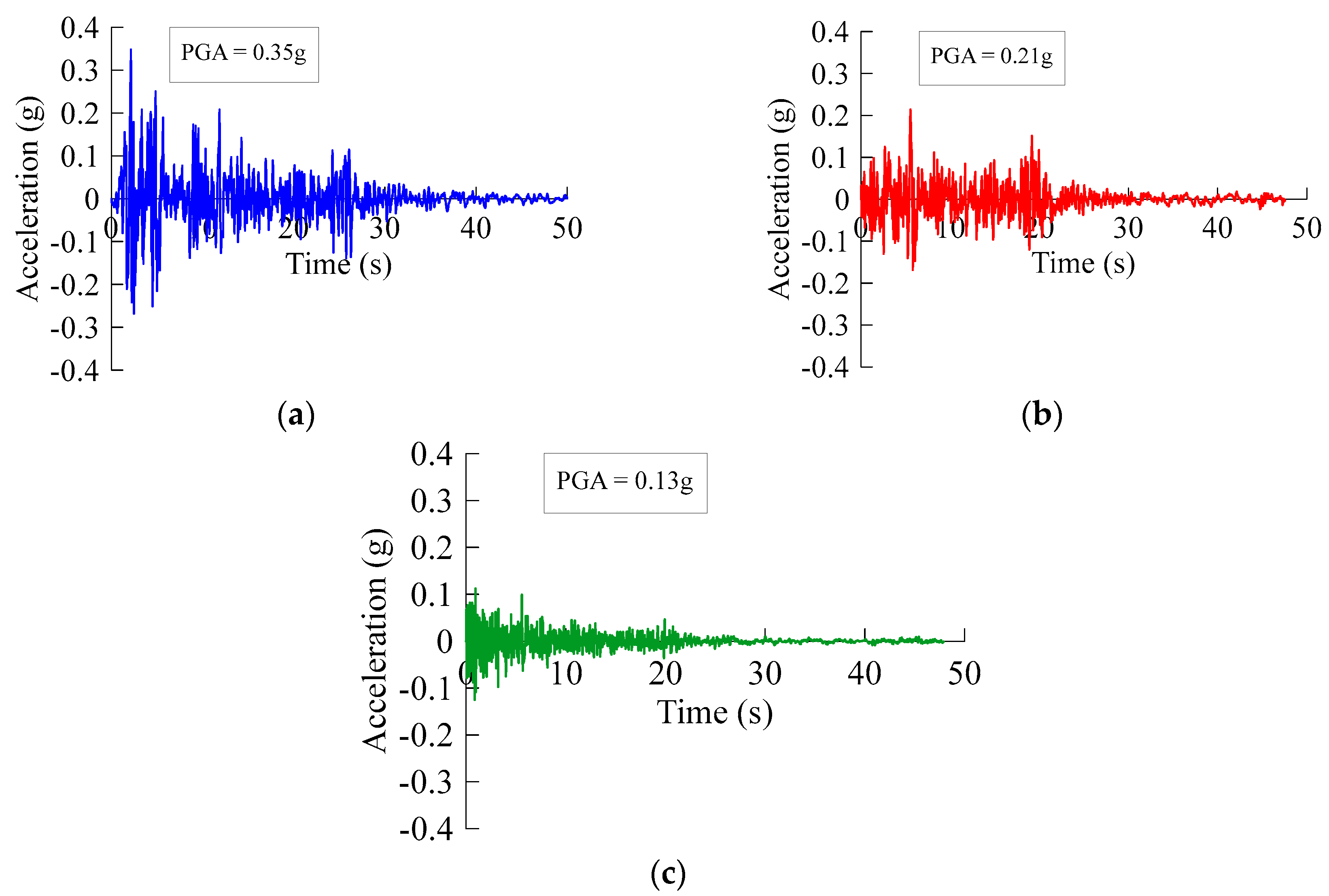
4.2. Seismic Response
5. Conclusions
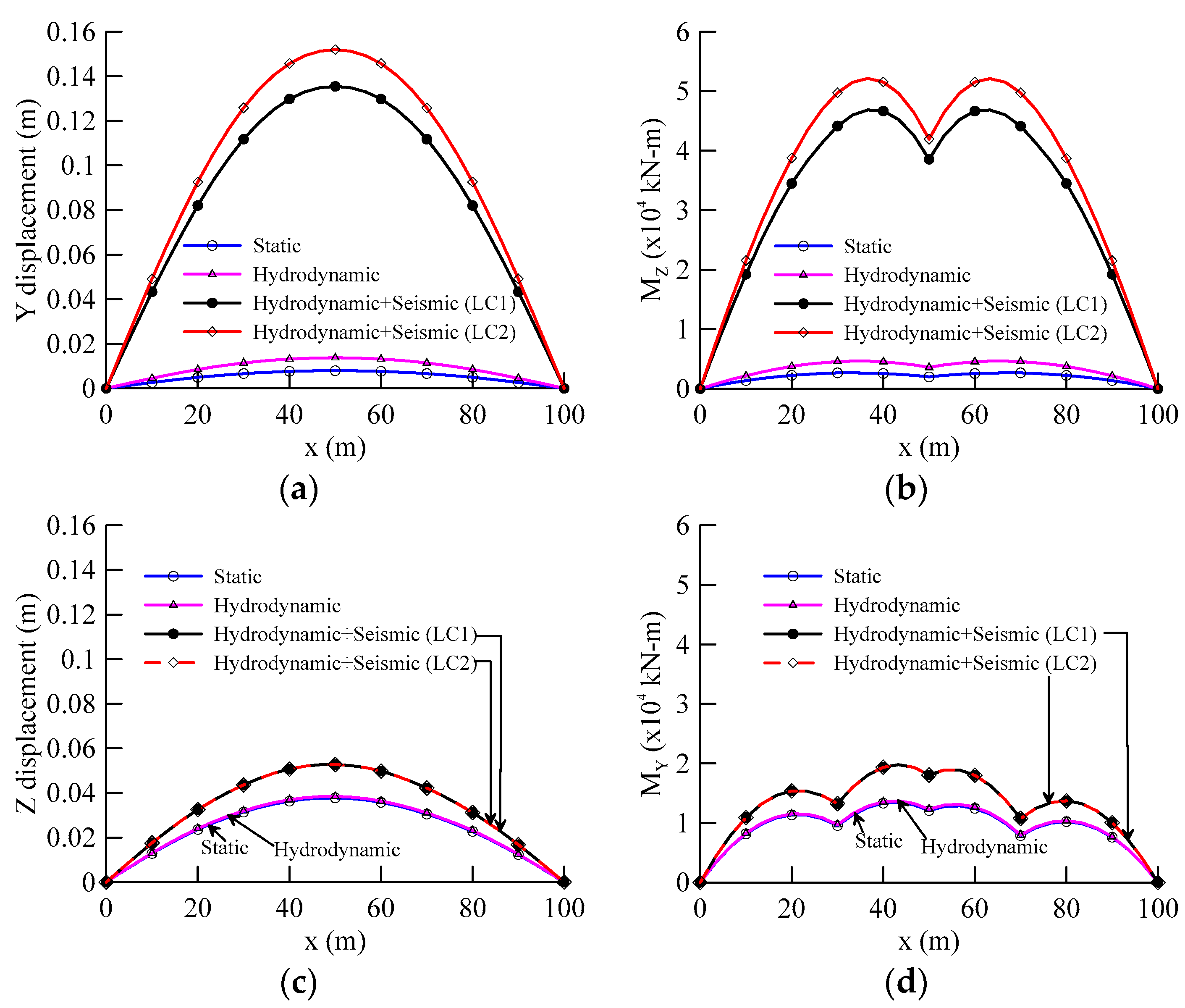
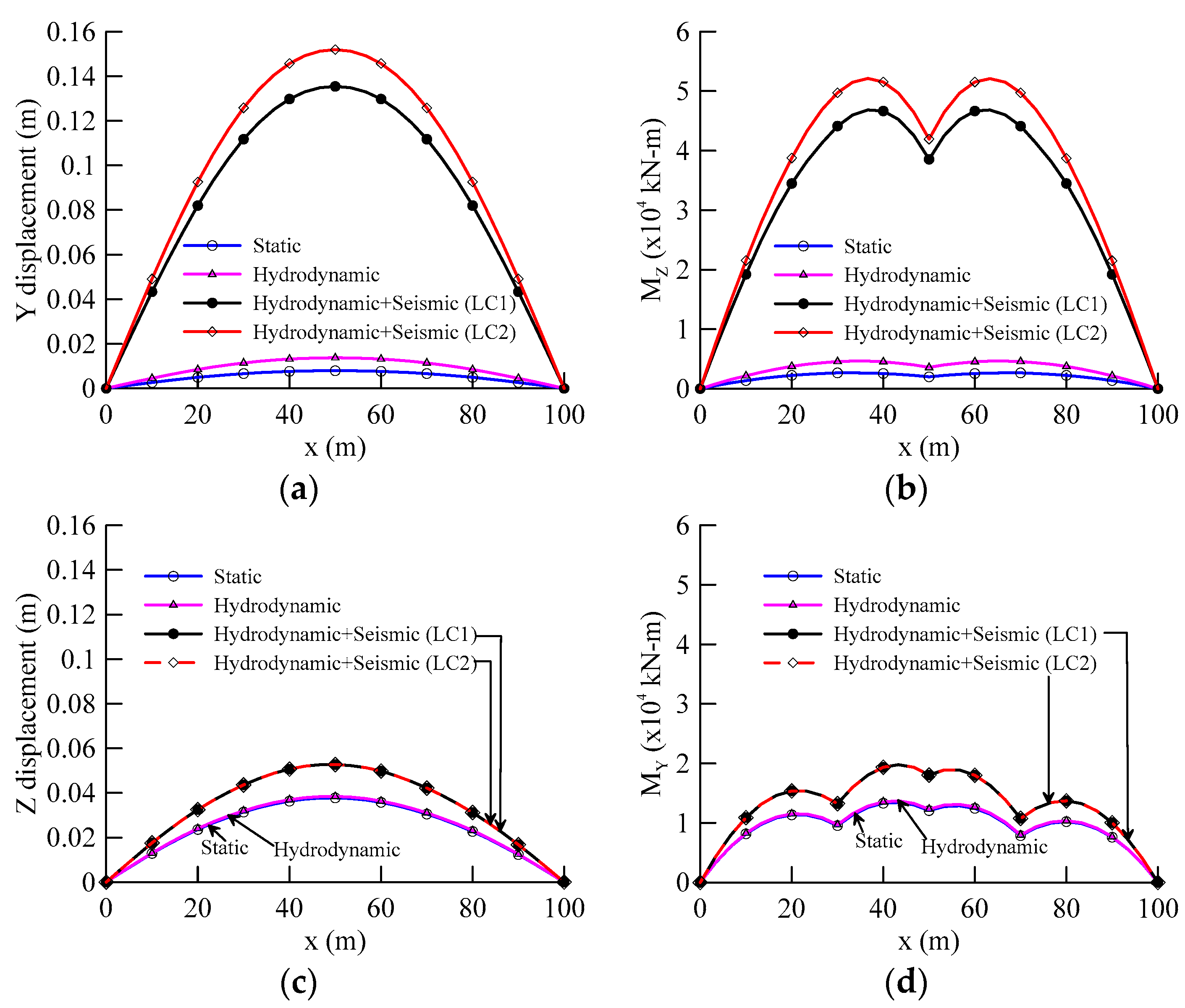
- The static response can provide a benchmark for decision-making on mooring cable arrangements and configurations for the preliminary design. However, the static analysis underestimates the responses in comparison to those of dynamic analysis
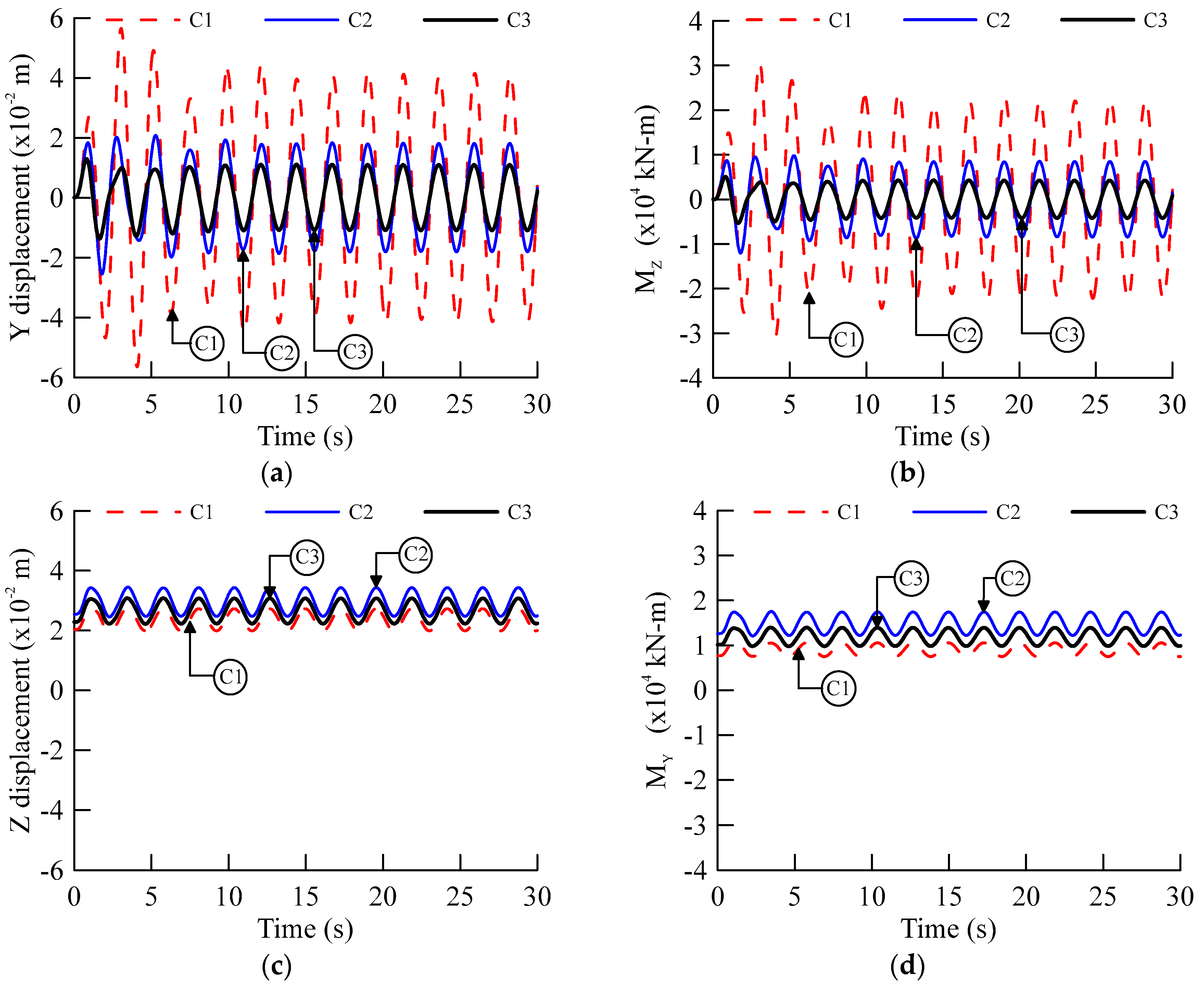
- The SFT moored by tension leg mooring cables was least effective, because of lesser horizontal stiffness, and the SFT moored by such mooring cables undergoes extreme displacements in the transverse direction as compared to the one moored by inclined mooring cables. The SFT moored by a combination of tension legs and single inclined mooring cables was effective for moderate environmental conditions. For severe environmental conditions, the SFT should be moored either by a combination of tension legs and double inclined mooring cables or only by double inclined mooring cables.
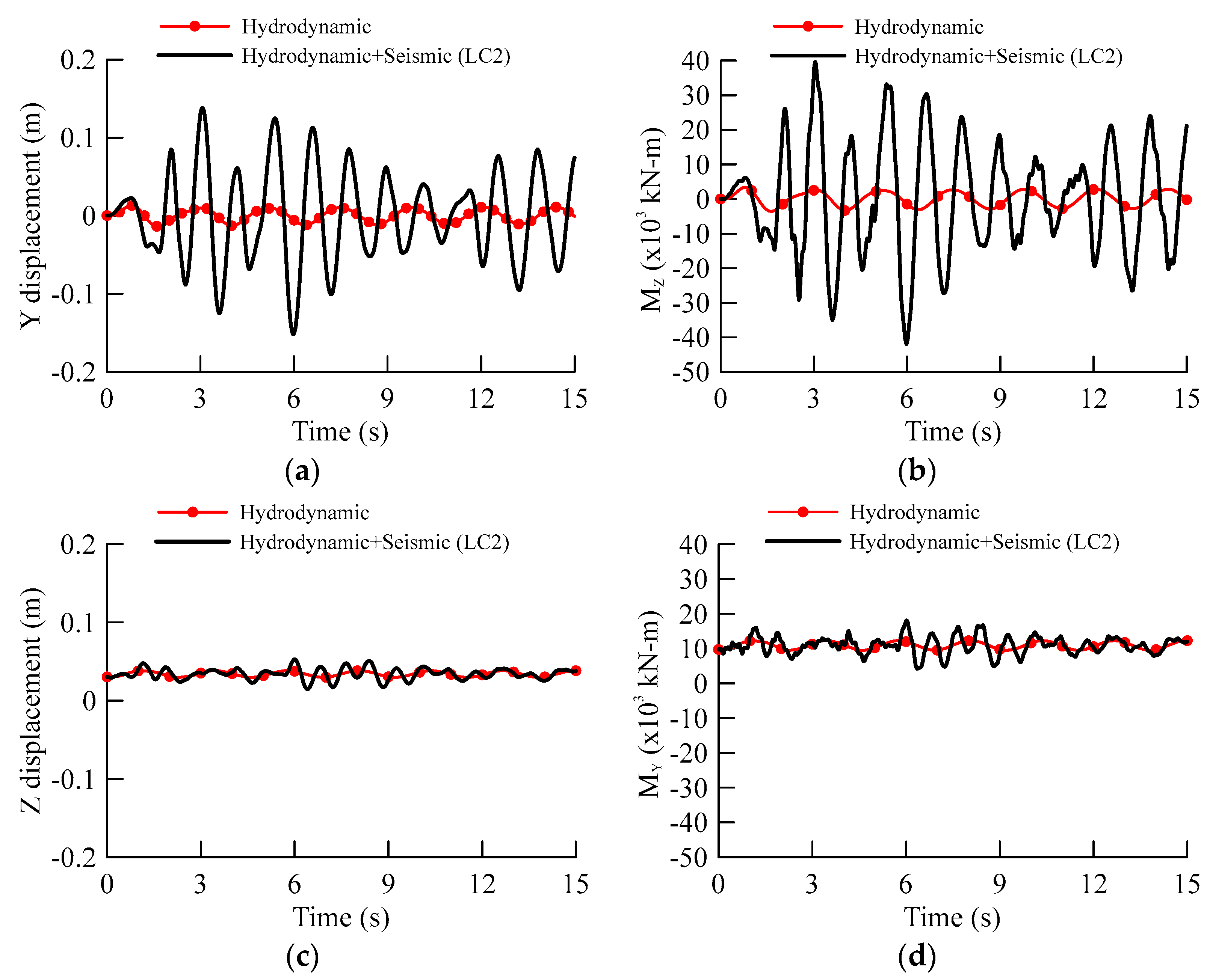
- For hydrodynamic analysis, the transient motions of SFT were small and decayed quickly, and the steady-state motions mainly governed the structural response of SFT under the prescribed damping conditions. In the case of the seismic analysis, the transient motions are more pronounced as compared to the hydrodynamic response.
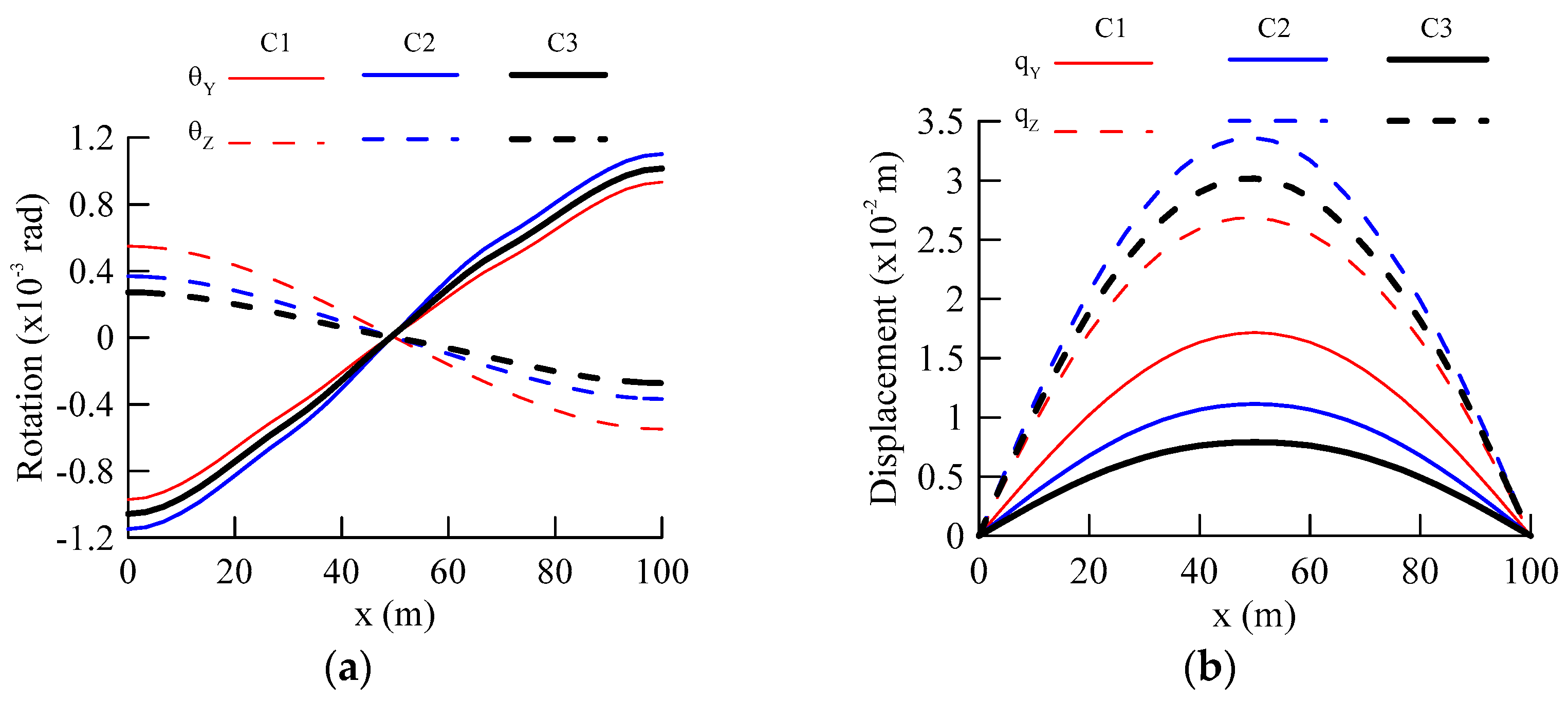
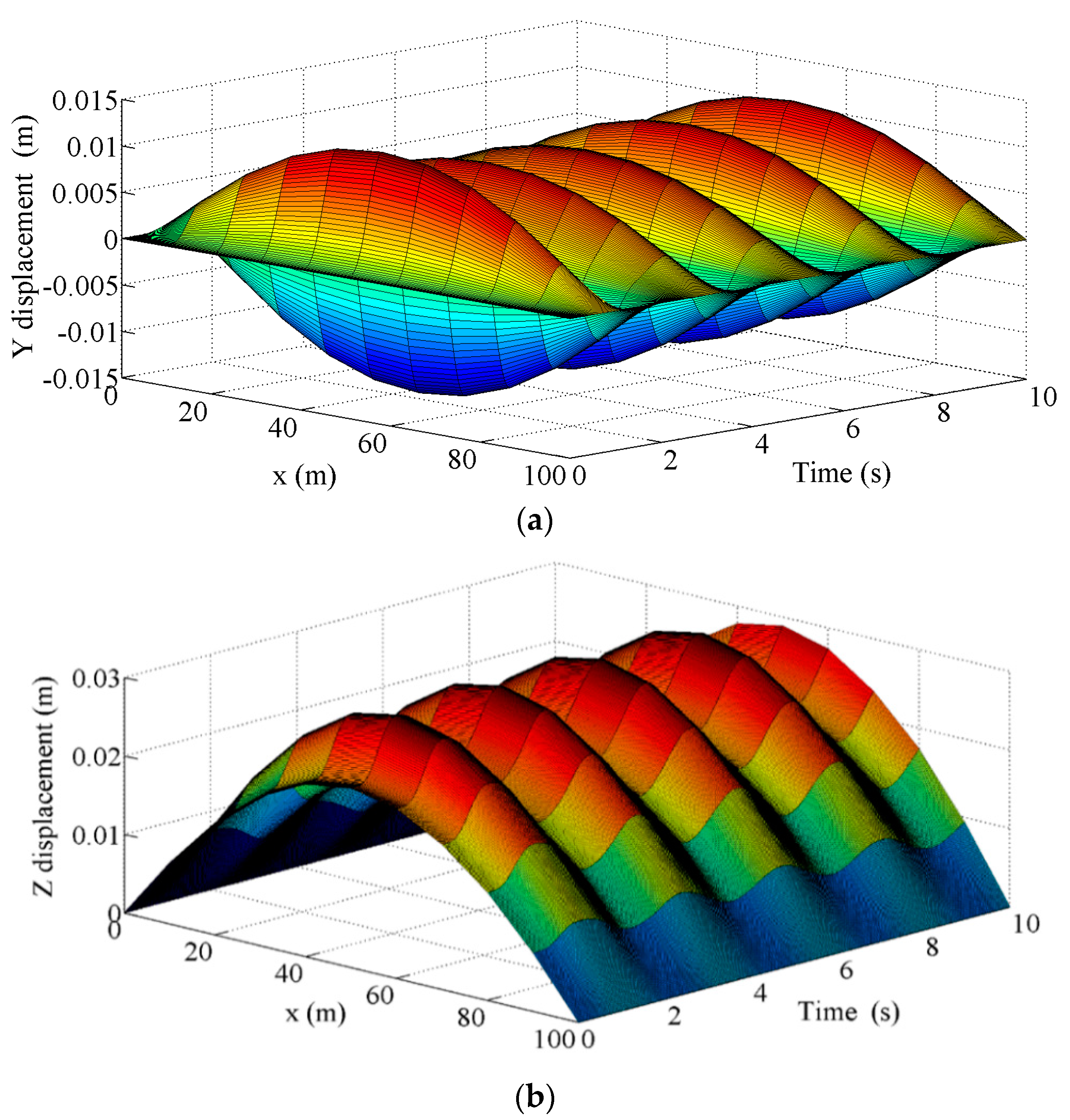
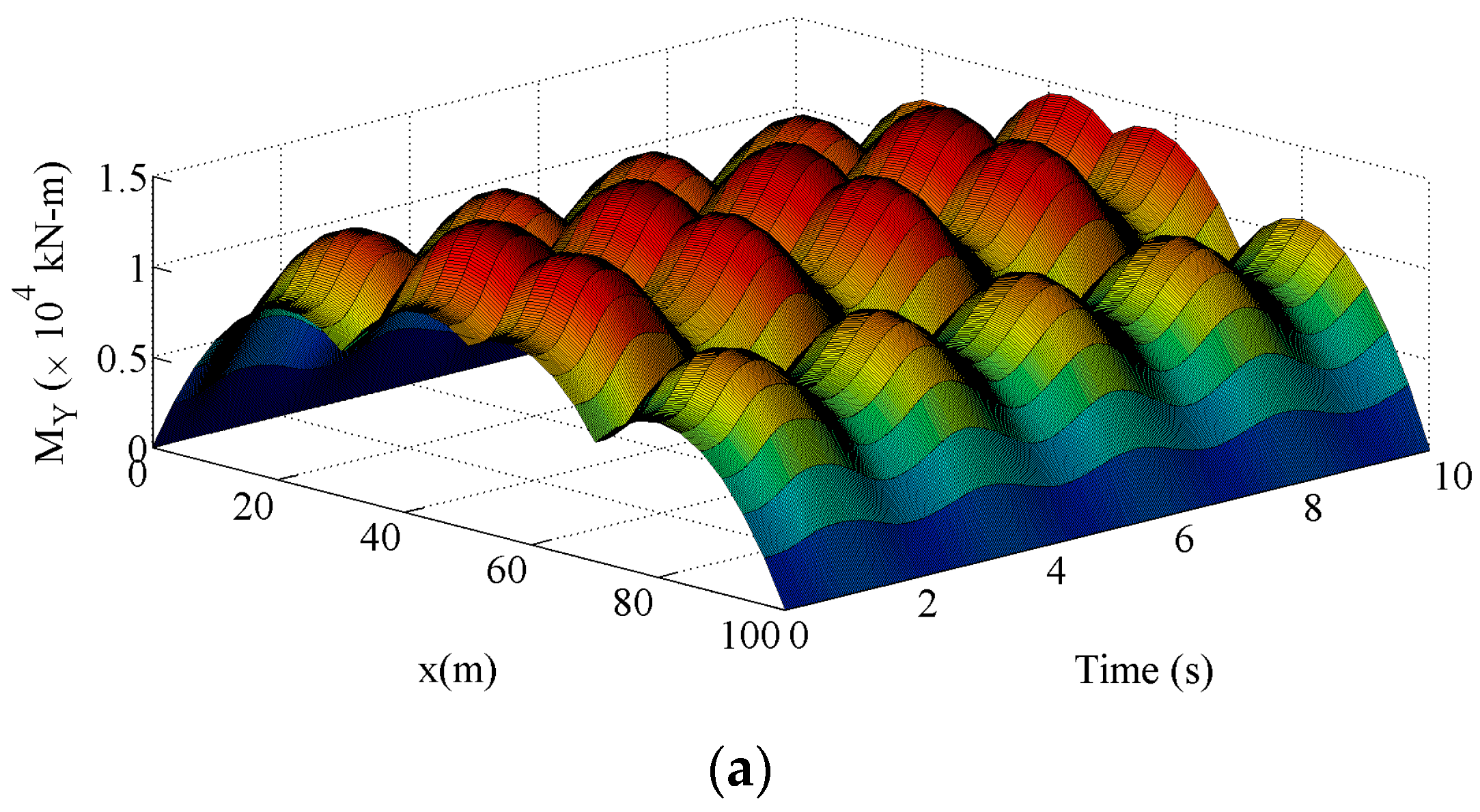
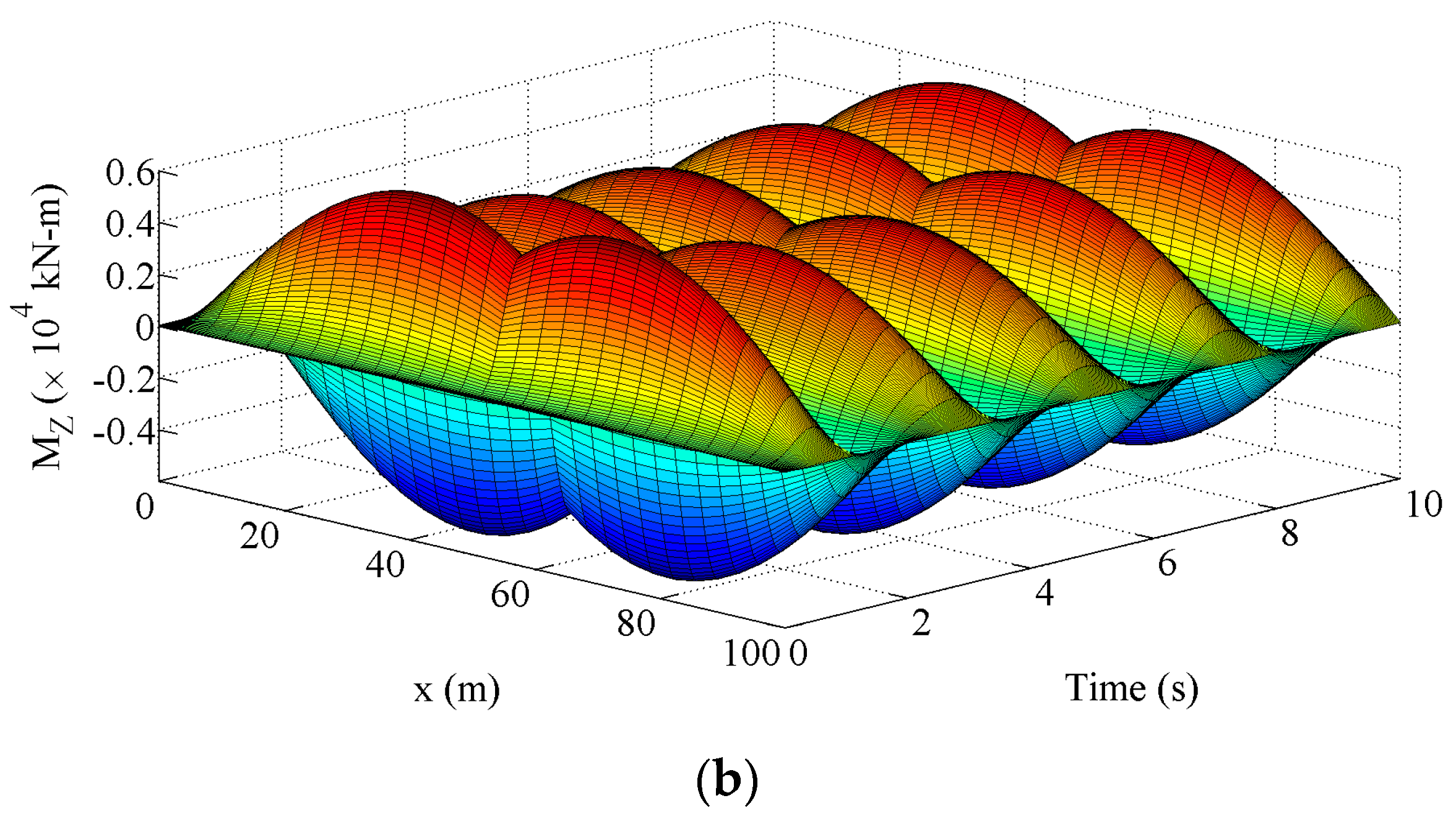
- In the hydrodynamic analysis, the vertical response of SFT was very small and mainly attributed to gravity and hydrodynamic forces; while the transverse response was very large for seismic analysis. The transverse displacements and internal forces were found to be larger than those of the vertical direction, which showed less restraining and lesser mooring cable stiffness in the transverse direction.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ahrens, D. Chapter 10 submerged floating tunnels—A concept whose time has arrived. Tunn. Undergr. Space Technol. 1997, 12, 317–336. [Google Scholar] [CrossRef]
- Faggiano, B.; Landolfo, R.; Mazzolani, F. The SFT: An innovative solution for waterway strait crossings. IABSE Symp. Rep. 2005, 90, 36–42. [Google Scholar] [CrossRef]
- Skorpa, L. Innovative Norwegian fjord crossing. How to cross the HØGSJORD, alternative methods. In Proceedings of the 2nd Congress AIOM (Marine and Offshore Engineering Association), Naples, Italy, 15–17 November 1989. [Google Scholar]
- Maeda, N.; Morikawa, M.; Ishikawa, K.; Kakuta, Y. Study on structural characteristics of support systems for submerged floating tunnel. In Proceedings of the 3rd Symposium on Strait Crossings, Ålesund, Norway, 12–15 June 1994; pp. 579–674. [Google Scholar]
- Lu, W.; Ge, F.; Wang, L.; Wu, X.; Hong, Y. On the slack phenomena and snap force in tethers of submerged floating tunnels under wave conditions. Mar. Struct. 2011, 24, 358–376. [Google Scholar] [CrossRef]
- Bruschi, R.; Giardinieri, V.; Marazza, R.; Merletti, T. Submerged Buoyant Anchored Tunnels: Technical Solution for the Fixed Link across the Strait of Messina Strait Crossings; Balkema: Rotterdam, Dutch, 1990. [Google Scholar]
- Faggiano, B.; Landolfo, R.; Mazzolani, F. Design and modelling aspects concerning the submerged floating tunnels: An application to the Messina strait crossing. In Proceedings of the Fourth Symposium on Strait Crossings, Bergen, Norway, 2–5 September 2001; pp. 1–5. [Google Scholar]
- Mazzolani, F.; Landolfo, R.; Faggiano, B.; Esposto, M.; Perotti, F.; Barbella, G. Structural analyses of the submerged floating tunnel prototype in Qiandao Lake (PR of China). Adv. Struct. Eng. 2008, 11, 439–454. [Google Scholar] [CrossRef]
- Martinelli, L.; Barbella, G.; Feriani, A. A numerical procedure for simulating the multi-support seismic response of submerged floating tunnels anchored by cables. Eng. Struct. 2011, 33, 2850–2860. [Google Scholar] [CrossRef]
- Han, J.S.; Won, B.; Park, W.-S.; Ko, J.H. Transient response analysis by model order reduction of a Mokpo-Jeju submerged floating tunnel under seismic excitations. Struct. Eng. Mech. 2016, 57, 921–936. [Google Scholar] [CrossRef]
- Kunisu, H. Evaluation of wave force acting on submerged floating tunnels. Procedia Eng. 2010, 4, 99–105. [Google Scholar] [CrossRef]
- Seo, S.I.; Mun, H.S.; Lee, J.H.; Kim, J.H. Simplified analysis for estimation of the behavior of a submerged floating tunnel in waves and experimental verification. Mar. Struct. 2015, 44, 142–158. [Google Scholar] [CrossRef]
- Brancaleoni, F.; Castellani, A.; D’Asdia, P. The response of submerged tunnels to their environment. Eng. Struct. 1989, 11, 47–56. [Google Scholar] [CrossRef]
- Okstad, K.M.; Haukas, T.; Remseth, S.; Mathisen, K.M. Fluid-structure interaction simulation of submerged floating tunnels. In Computational Mechanics New Treds and Applications; Centro Internacional de Métodos Numéricos en Ingeniería: Barcelona, Spain, 1998; pp. 1–13. [Google Scholar]
- Remseth, S.; Leira, B.J.; Okstad, K.M.; Mathisen, K.M.; Haukås, T. Dynamic response and fluid/structure interaction of submerged floating tunnels. Comput. Struct. 1999, 72, 659–685. [Google Scholar] [CrossRef]
- Di Pilato, M.; Perotti, F.; Fogazzi, P. 3D dynamic response of submerged floating tunnels under seismic and hydrodynamic excitation. Eng. Struct. 2008, 30, 268–281. [Google Scholar] [CrossRef]
- Di Pilato, M.; Feriani, A.; Perotti, F. Numerical models for the dynamic response of submerged floating tunnels under seismic loading. Earthq. Eng. Struct. Dyn. 2008, 37, 1203–1222. [Google Scholar] [CrossRef]
- Fogazzi, P.; Perotti, F. The dynamic response of seabed anchored floating tunnels under seismic excitation. Earthq. Eng. Struct. Dyn. 2000, 29, 273–295. [Google Scholar] [CrossRef]
- Li, J.; Li, Y. Analytical solution to the vortex-excited vibration of tether in the submerged floating tunnel. Am. Soc. Civ. Eng. 2006, 164–169. [Google Scholar] [CrossRef]
- Luoa, G.; Chen, J.; Zhou, X. Effects of various factors on the viv-induced fatigue damage in the cable of submerged floating tunnel. Pol. Marit. Res. 2015, 22, 76–83. [Google Scholar] [CrossRef]
- Yiqiang, X.; Chunfeng, C. Vortex-induced dynamic response analysis for the submerged floating tunnel system under the effect of currents. J. Waterw. Port Coast. Ocean Eng. 2012, 139, 183–189. [Google Scholar] [CrossRef]
- Tariverdilo, S.; Mirzapour, J.; Shahmardani, M.; Shabani, R.; Gheyretmand, C. Vibration of submerged floating tunnels due to moving loads. Appl. Math. Model. 2011, 35, 5413–5425. [Google Scholar] [CrossRef]
- Lee, J.H.; Seo, S.I.; Mun, H.S. Seismic behaviors of a floating submerged tunnel with a rectangular cross-section. Ocean Eng. 2016, 127, 32–47. [Google Scholar] [CrossRef]
- Mirzapour, J.; Shahmardani, M.; Tariverdilo, S. Seismic response of submerged floating tunnel under support excitation. Ships Offshore Struct. 2016, 1–8. [Google Scholar] [CrossRef]
- Xiang, Y.; Yang, Y. Spatial dynamic response of submerged floating tunnel under impact load. Mar. Struct. 2017, 53, 20–31. [Google Scholar] [CrossRef]
- Chakrabarti, S.K. Hydrodynamics of Offshore Structures; WIT Press: Southampton, UK, 1987. [Google Scholar]
- Sarpkaya, T.; Isaacson, M. Mechanics of Wave Forces on Offshore Structures; Van Nostrand Reinhold: New York, NY, USA, 1981. [Google Scholar]
- Veritas, D.N. Free Spanning Pipelines; Recommended Practice DNV-RPF105; Det Norske Veritas Germanischer Lloyd (DNV GL): Oslo, Norway, 2006; Available online: http://rules.dnvgl.com/docs/pdf/DNV/codes/docs/2006-02/RP-F105.pdf (accessed on 24 September 2017).
- Logan, D.L. A First Course in the Finite Element Method; Cengage Learning: Boston, MA, USA, 2011. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mooring configuration | Section A | Section B | Section C |
|---|---|---|---|
| Configuration 1 (C1) |  | | |
| Configuration 2 (C2) | |  | |
| Configuration 3 (C3) | |  | |
| Element | Parameter | Unit | Value |
|---|---|---|---|
| Tunnel | Tunnel equivalent density | kg/m3 | 2451 |
| Elastic modulus | N/m2 | 3 × 1010 | |
| Area | m2 | 5.1 | |
| Moment of inertia | m4 | 12.3 | |
| Length of tunnel | m | 100 | |
| Mooring cables | Elastic modulus | N/m2 | 1.4 × 1011 |
| Diameter of cable | m | 0.06 | |
| Moment of inertia | m4 | 6 × 10−7 | |
| Cable density | kg/m3 | 7850 | |
| Hydrodynamics | Wave height (H) | m | 1 |
| Time period (T) | s | 2.3 | |
| Surface current velocity () | m/s | 0.1 | |
| Depth of water (h) | m | 30 | |
| Distance of SFT from free surface (h1) | m | 2 | |
| Density of water (ρw) | kg/m3 | 1050 | |
| Drag coefficient (CD) | -- | 1 | |
| Inertia coefficient (CM) | -- | 2 |
| A | B | C | |||||||
|---|---|---|---|---|---|---|---|---|---|
| C1 | C2 | C3 | C1 | C2 | C3 | C1 | C2 | C3 | |
| (×10−3 rad) | −0.441 | −0.585 | −0.512 | 0.022 | 0.027 | 0.024 | 0.452 | 0.599 | 0.524 |
| (×10−3 rad) | 0.312 | 0.196 | 0.134 | −4 × 10−13 | −4.9 × 10−14 | −2.2 × 10−13 | −0.312 | −0.196 | −0.134 |
| (×10−2 m) | 1.395 | 0.918 | 0.663 | 1.716 | 1.114 | 0.791 | 1.395 | 0.918 | 0.663 |
| (×10−2 m) | 2.264 | 2.766 | 2.511 | 2.684 | 3.360 | 3.016 | 2.198 | 2.685 | 2.437 |
| (×103 kN-m) | 10.230 | 11.382 | 10.796 | 10.368 | 17.044 | 13.648 | 8.500 | 9.269 | 8.878 |
| (×103 kN-m) | 7.640 | 5.263 | 3.978 | 9.095 | 5.128 | 2.982 | 7.638 | 5.262 | 3.977 |
| (×102 kN) | 1.459 | 0.659 | 0.231 | −6.2 × 10−12 | −0.800 | −1.228 | −1.459 | −0.659 | −0.230 |
| (×102 kN) | −5.028 | −4.645 | −4.840 | −5.552 | −2.799 | −4.200 | −6.555 | −9.500 | −8.002 |
| Mode | C1 | C2 | C3 | Mode | C1 | C2 | C3 |
|---|---|---|---|---|---|---|---|
| 1 | 0.5660 | 0.6997 | 0.824 | 11 | 14.0467 | 14.0359 | 14.0408 |
| 2 | 1.2825 | 1.1542 | 1.2144 | 12 | 20.0309 | 20.0309 | 20.0309 |
| 3 | 2.2606 | 2.2606 | 2.2606 | 13 | 20.0417 | 20.0417 | 20.0417 |
| 4 | 2.5041 | 2.5041 | 2.5041 | 14 | 26.2123 | 26.2123 | 26.2123 |
| 5 | 5.0739 | 5.0907 | 5.1103 | 15 | 27.0944 | 27.0975 | 27.1010 |
| 6 | 5.1324 | 5.1025 | 5.1160 | 16 | 27.1051 | 27.0996 | 27.1021 |
| 7 | 8.7454 | 8.7454 | 8.7454 | 17 | 35.1364 | 35.1364 | 35.1364 |
| 8 | 8.9895 | 8.9895 | 8.9895 | 18 | 35.1522 | 35.1522 | 35.1522 |
| 9 | 9.0143 | 9.0143 | 9.0143 | 19 | 43.6074 | 43.6074 | 43.6074 |
| 10 | 13.985 | 13.991 | 13.998 | 20 | 44.1137 | 44.1155 | 44.1176 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muhammad, N.; Ullah, Z.; Choi, D.-H. Performance Evaluation of Submerged Floating Tunnel Subjected to Hydrodynamic and Seismic Excitations. Appl. Sci. 2017, 7, 1122. https://doi.org/10.3390/app7111122
Muhammad N, Ullah Z, Choi D-H. Performance Evaluation of Submerged Floating Tunnel Subjected to Hydrodynamic and Seismic Excitations. Applied Sciences. 2017; 7(11):1122. https://doi.org/10.3390/app7111122
Chicago/Turabian StyleMuhammad, Naik, Zahid Ullah, and Dong-Ho Choi. 2017. "Performance Evaluation of Submerged Floating Tunnel Subjected to Hydrodynamic and Seismic Excitations" Applied Sciences 7, no. 11: 1122. https://doi.org/10.3390/app7111122
APA StyleMuhammad, N., Ullah, Z., & Choi, D.-H. (2017). Performance Evaluation of Submerged Floating Tunnel Subjected to Hydrodynamic and Seismic Excitations. Applied Sciences, 7(11), 1122. https://doi.org/10.3390/app7111122