
Building an Interoperability Test System for Electric Vehicle Chargers Based on ISO/IEC 15118 and IEC 61850 Standards


Abstract
:
1. Introduction
- (i) We built a test system for EVSE in accordance with relevant standards, including ISO/IEC 15118, IEC 61851, IEC 61850-90-8 and HPGP.
- (ii) We built the first conformance test system for ISO/IEC 15118 that can test the communication between EVSE and the operator.
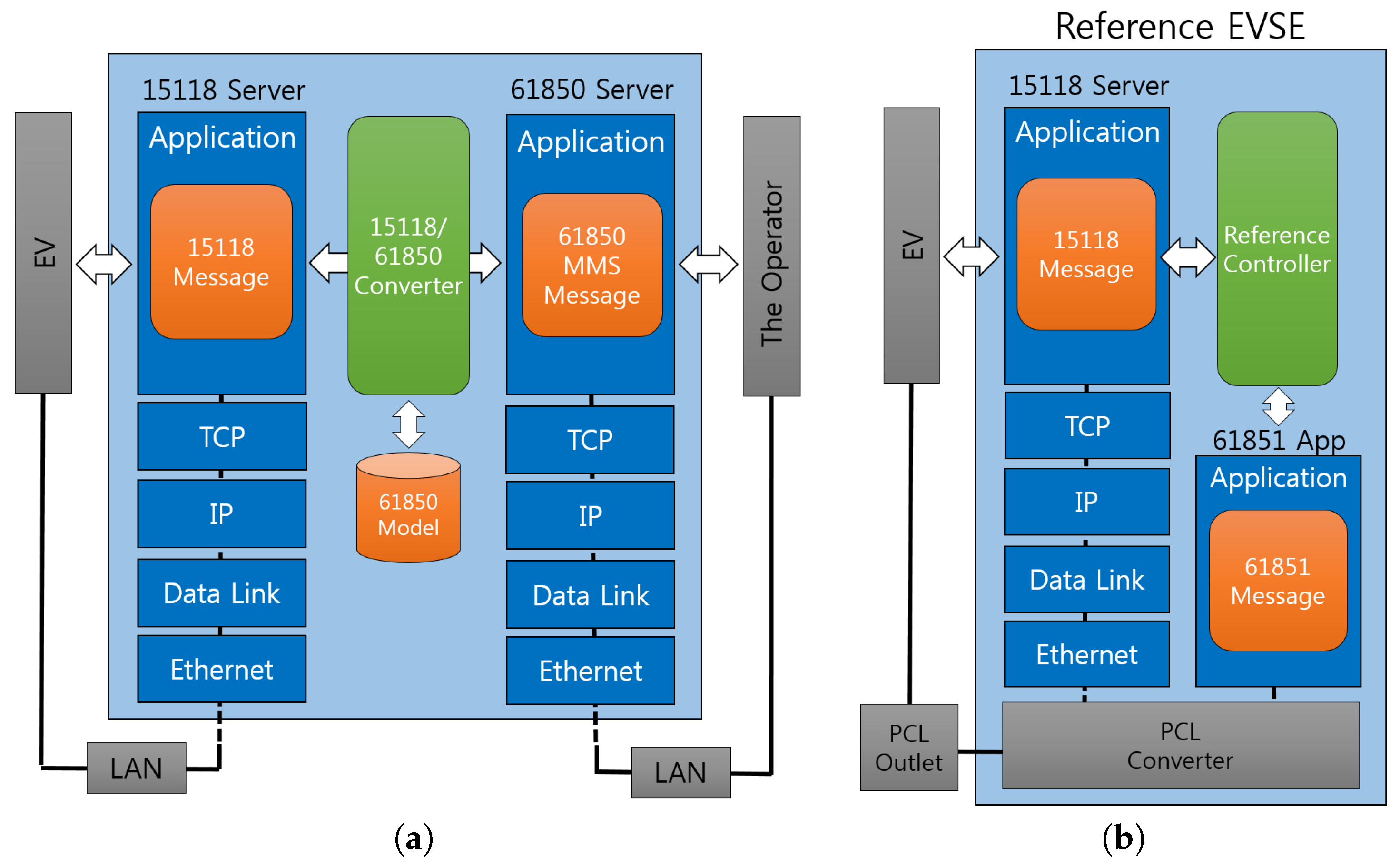
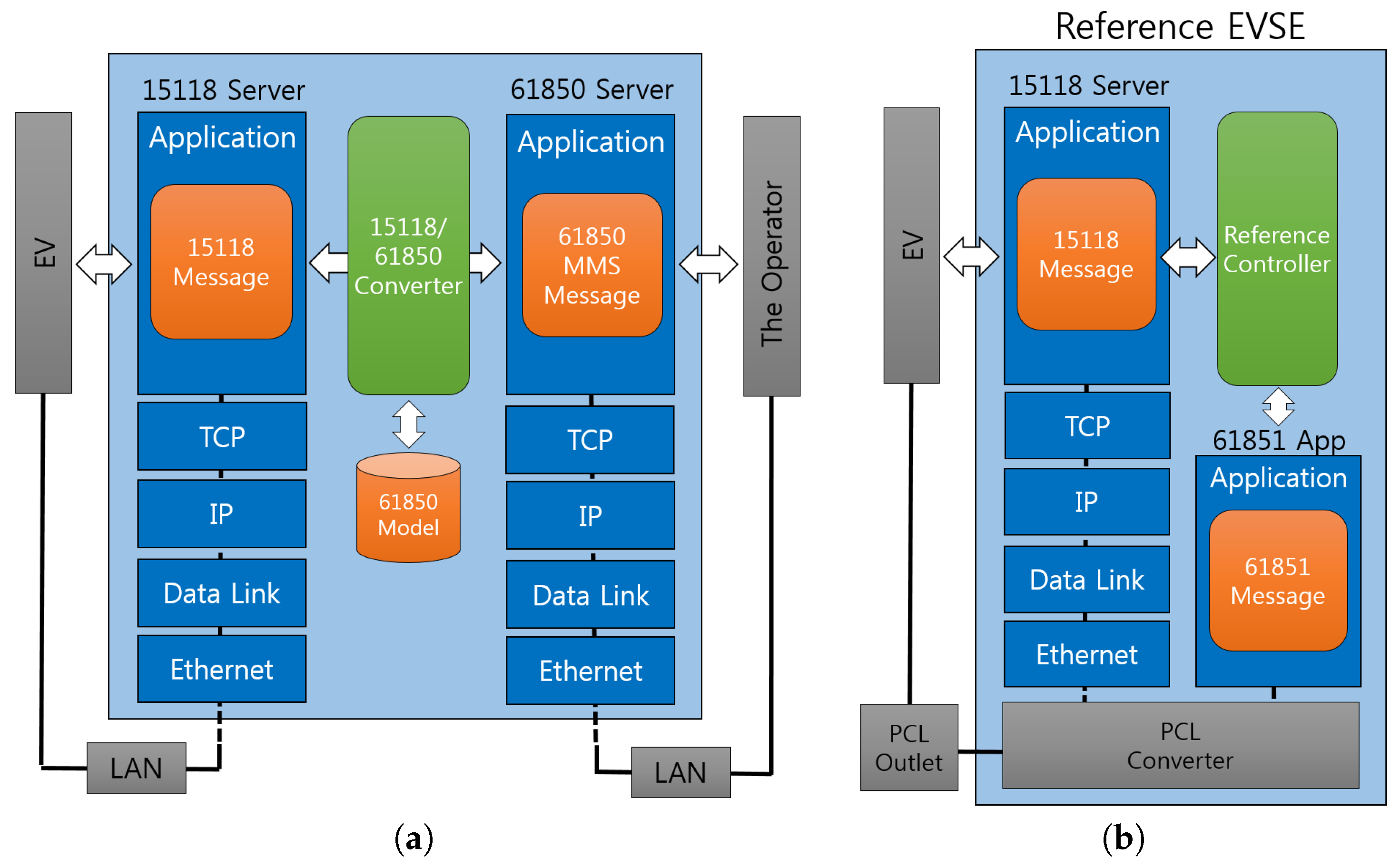
- (iii) We developed a reference EV charger that implements IEC-61850-90-8.
2. Background: Electric Vehicle Charging Systems and Standards
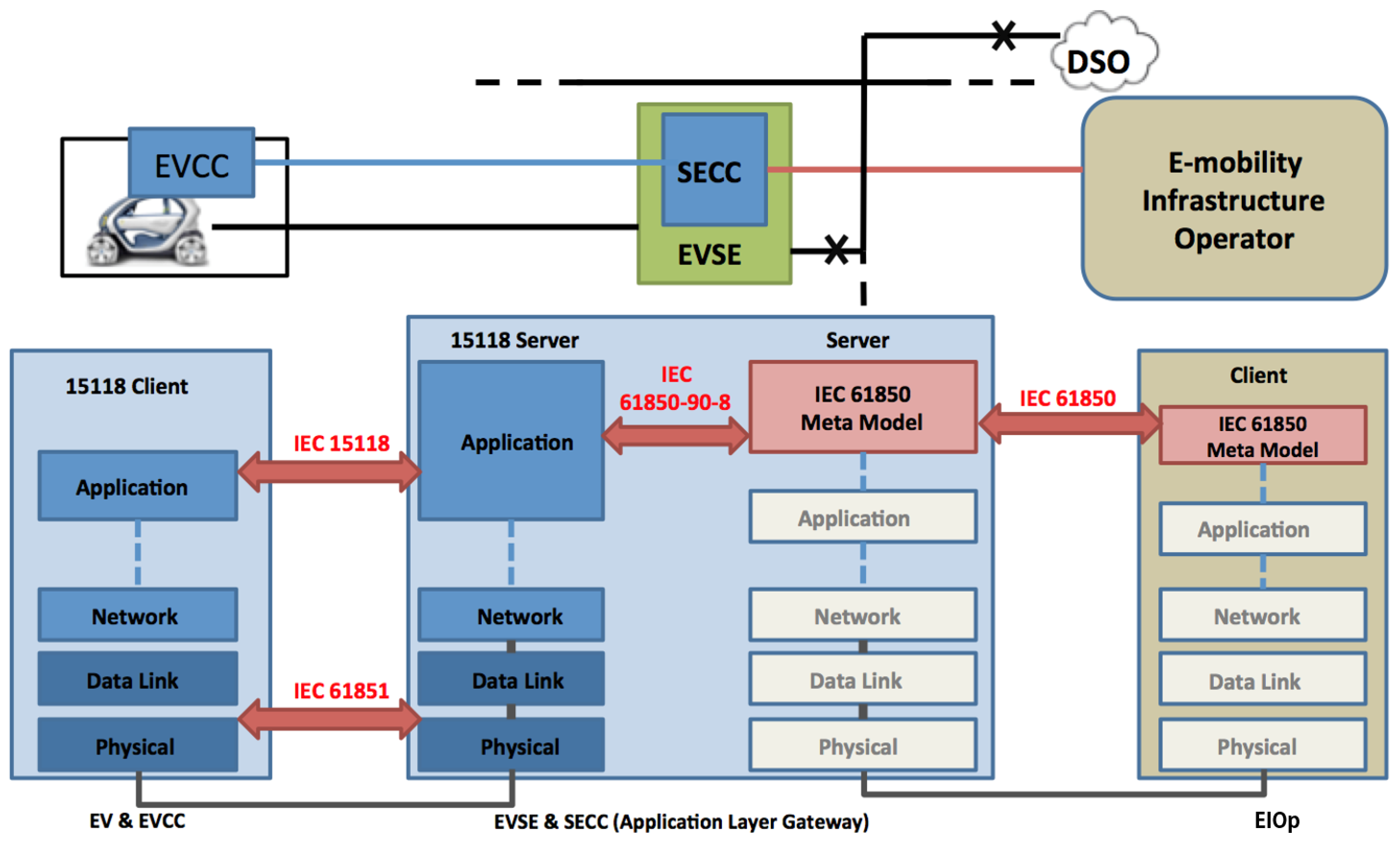
2.1. EV Charging Architecture
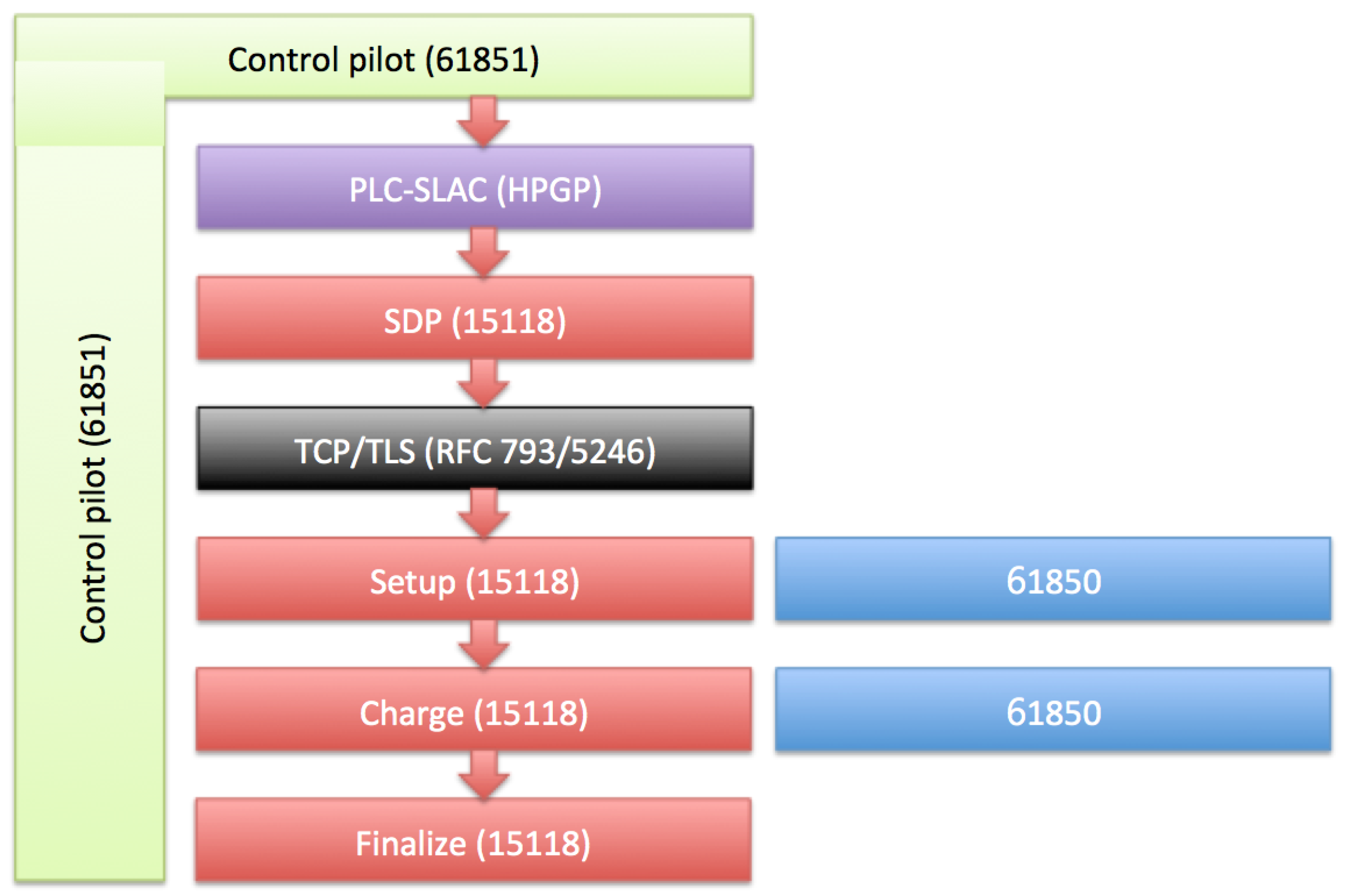
2.2. IEC 61851: Basic Signaling
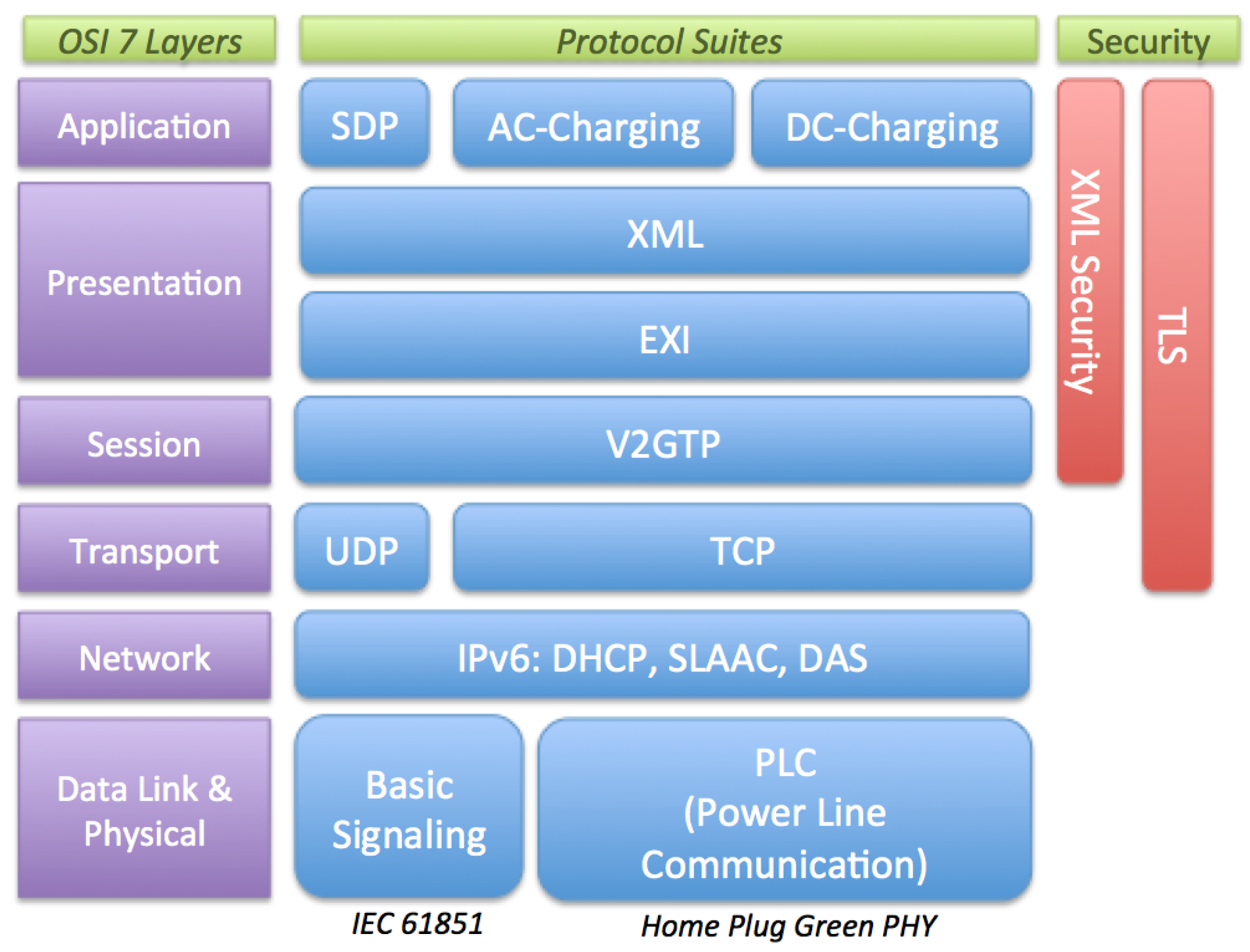
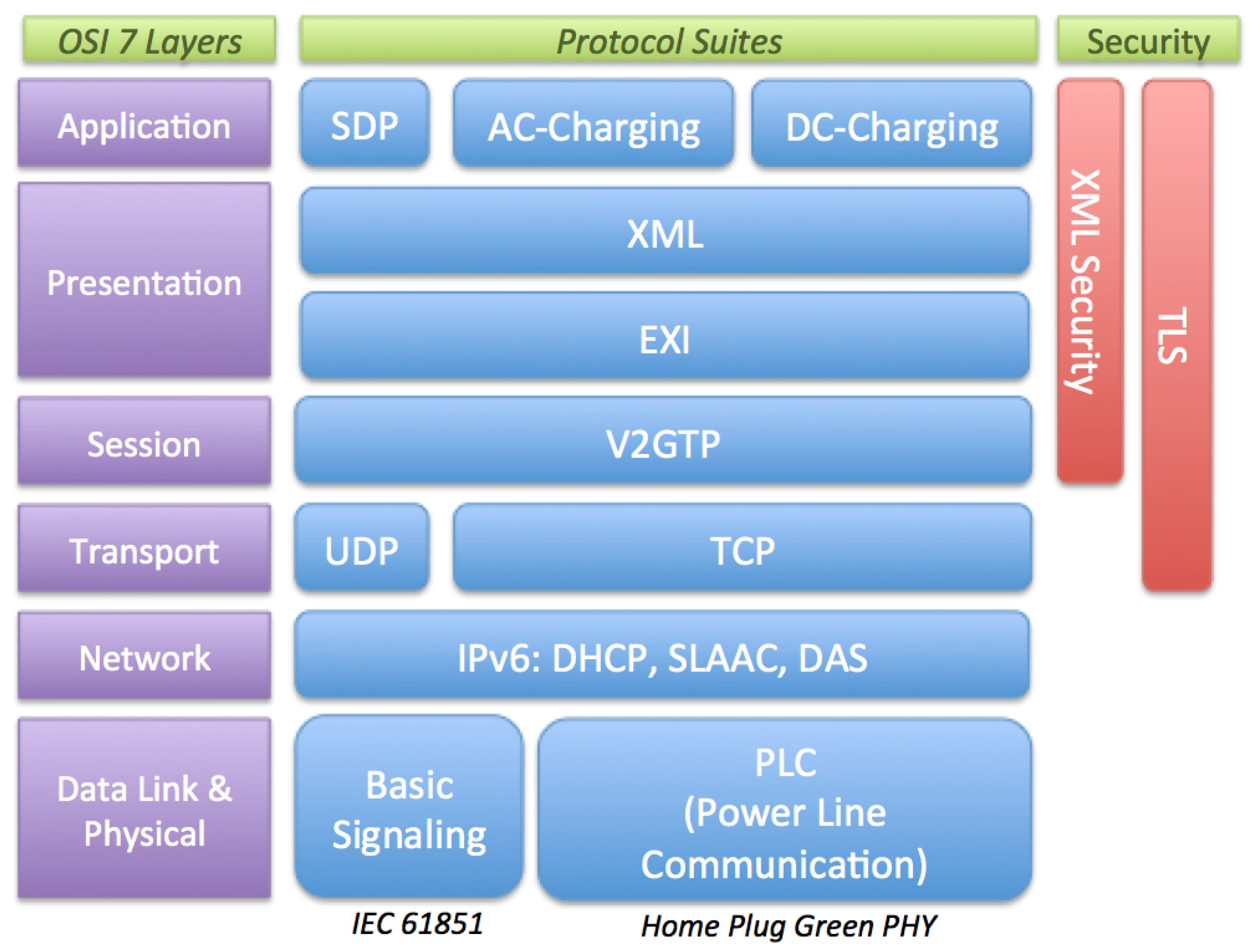
2.3. ISO/IEC 15118: High-Level Communication
2.4. Home Plug Green PHY: Physical/Data-Link Layer
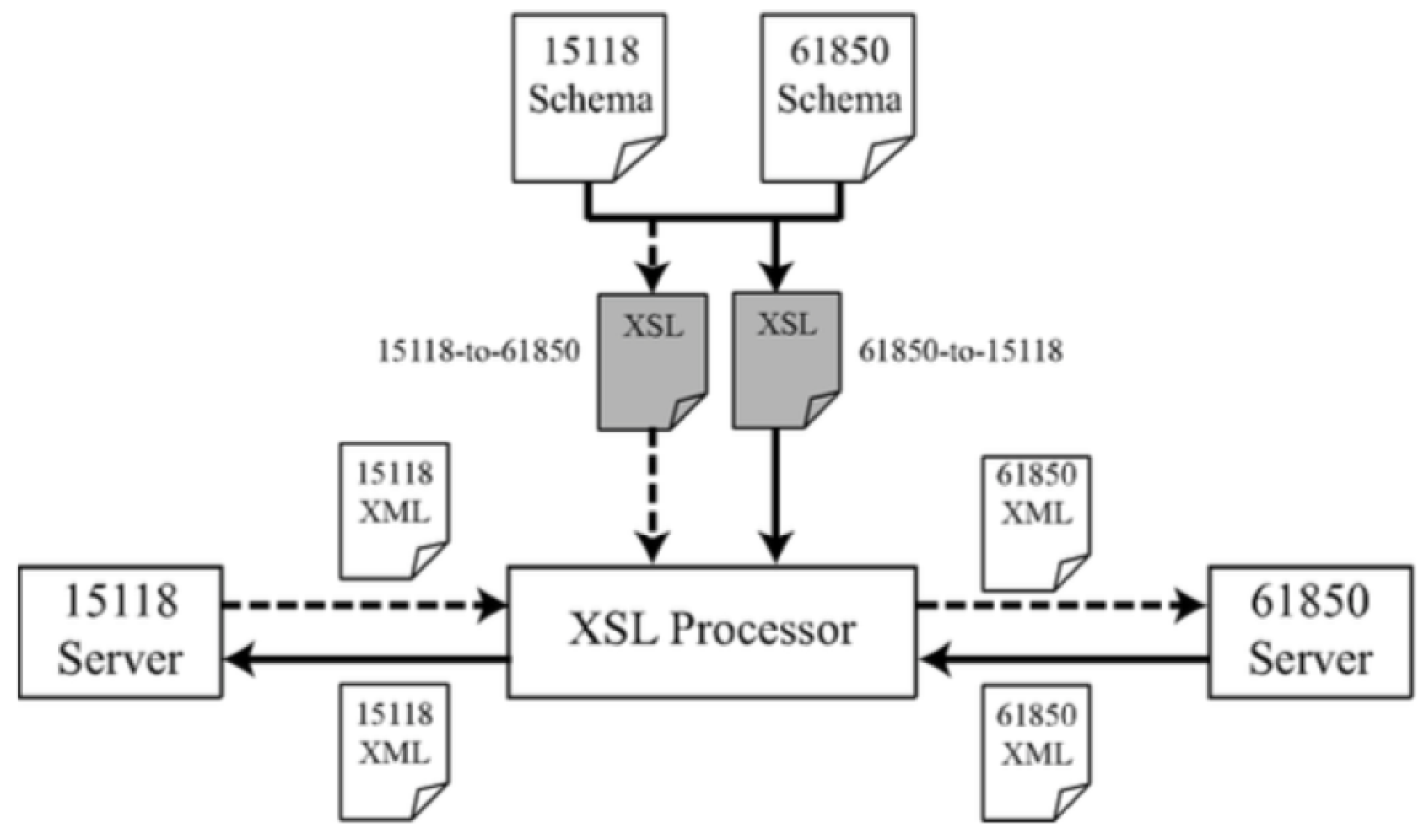
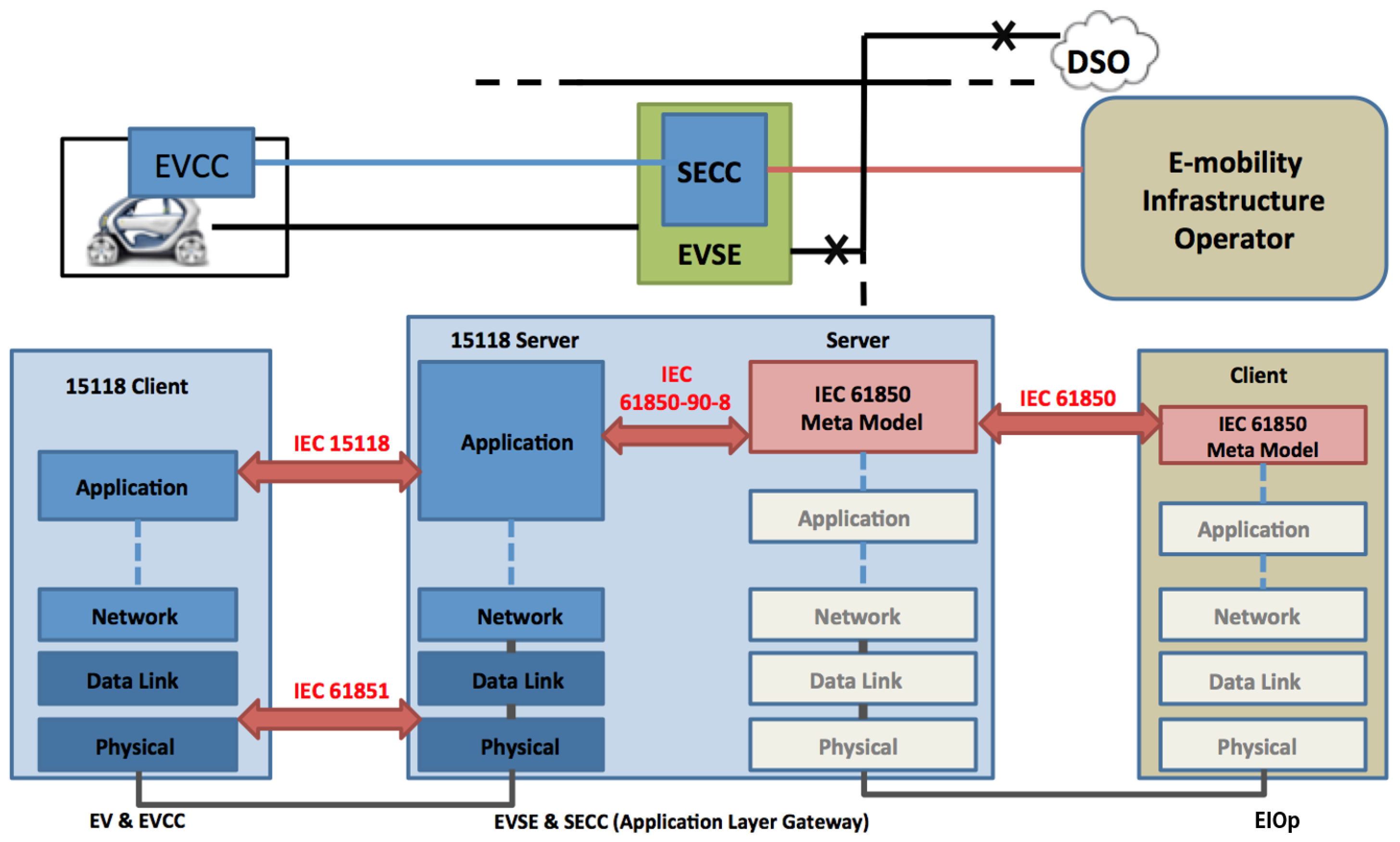
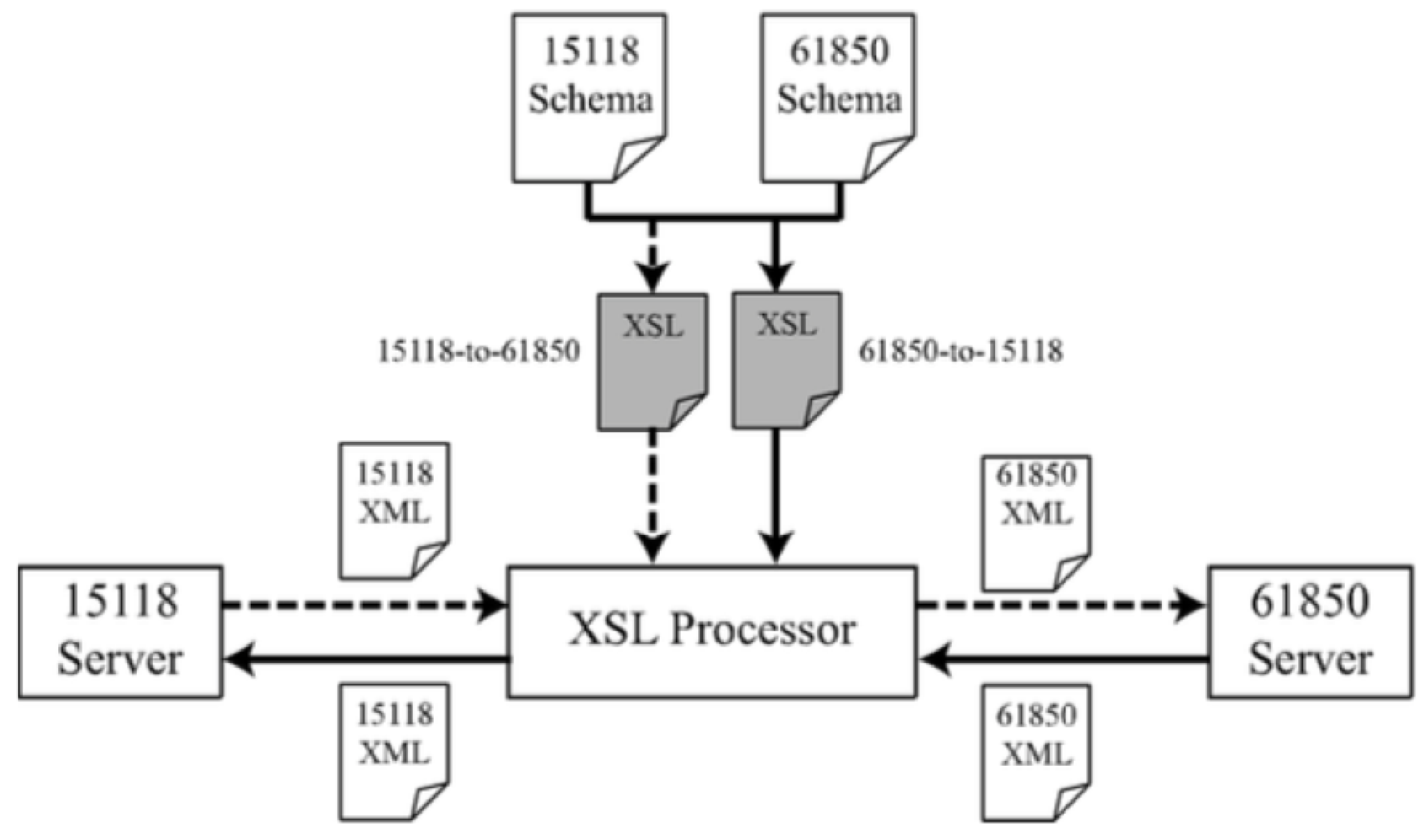
2.5. IEC 61850 and IEC 61850-90-8: Communication with the Operator
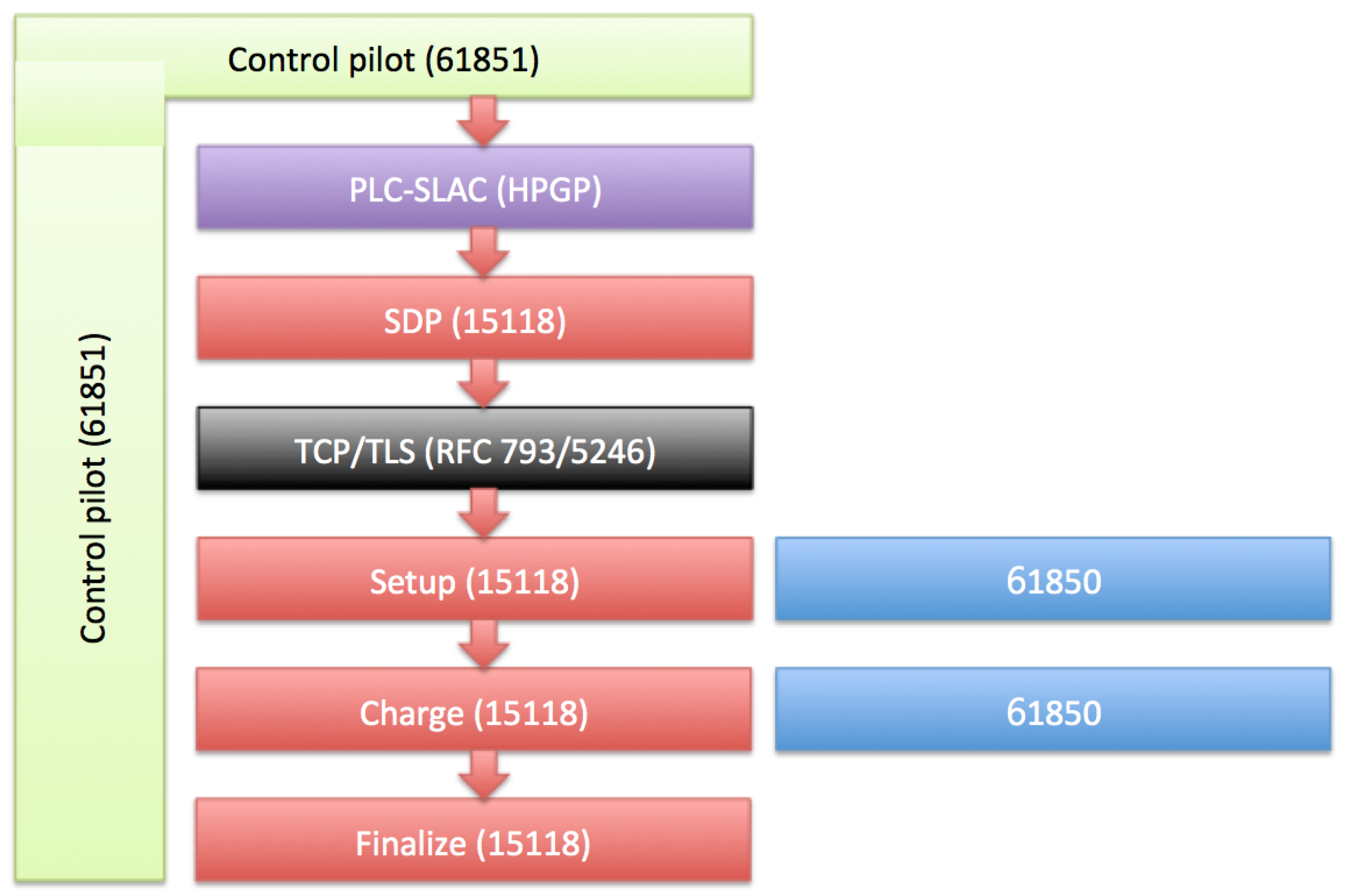
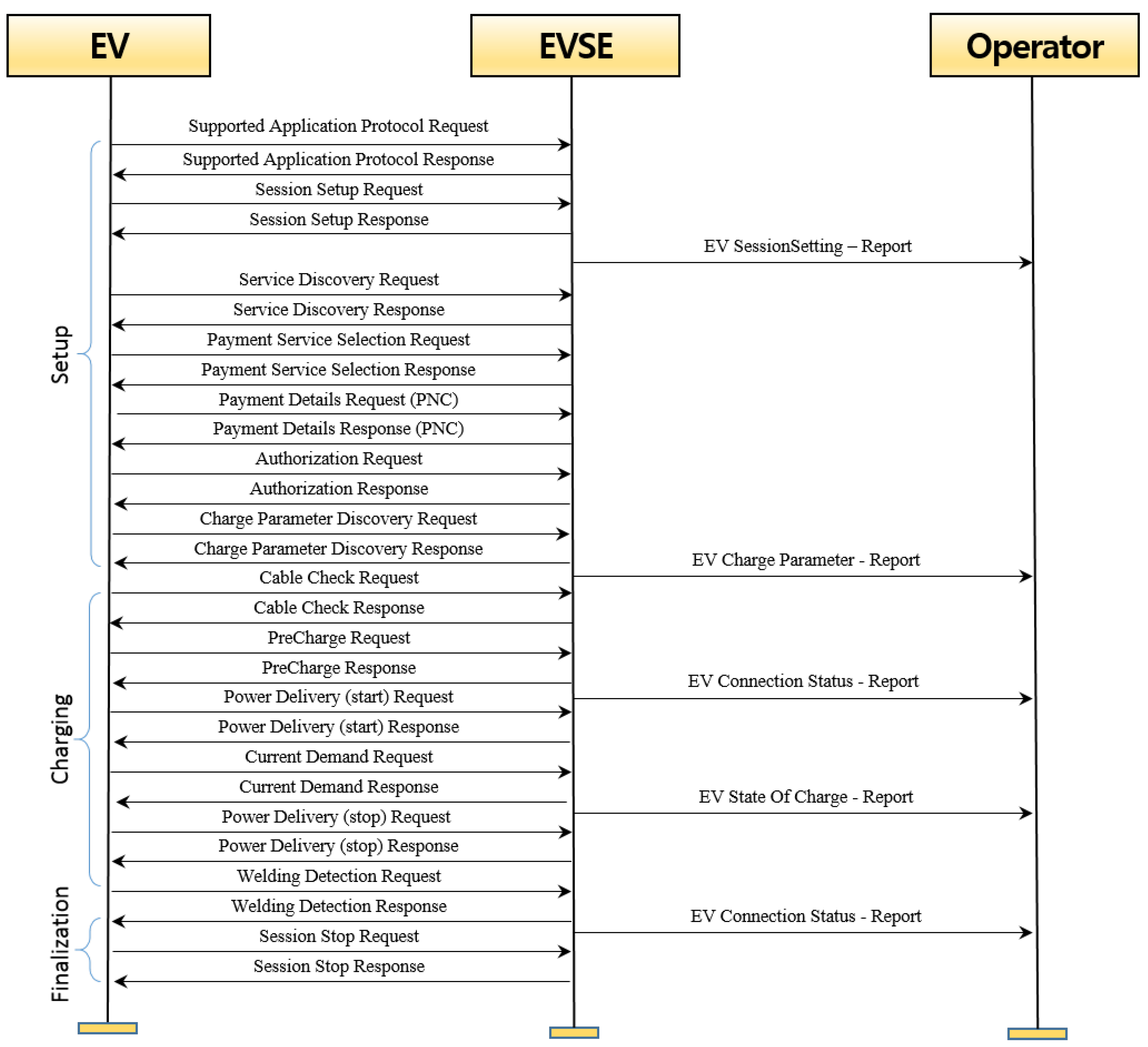
2.6. EV Charging Procedure
Overview
3. Test System
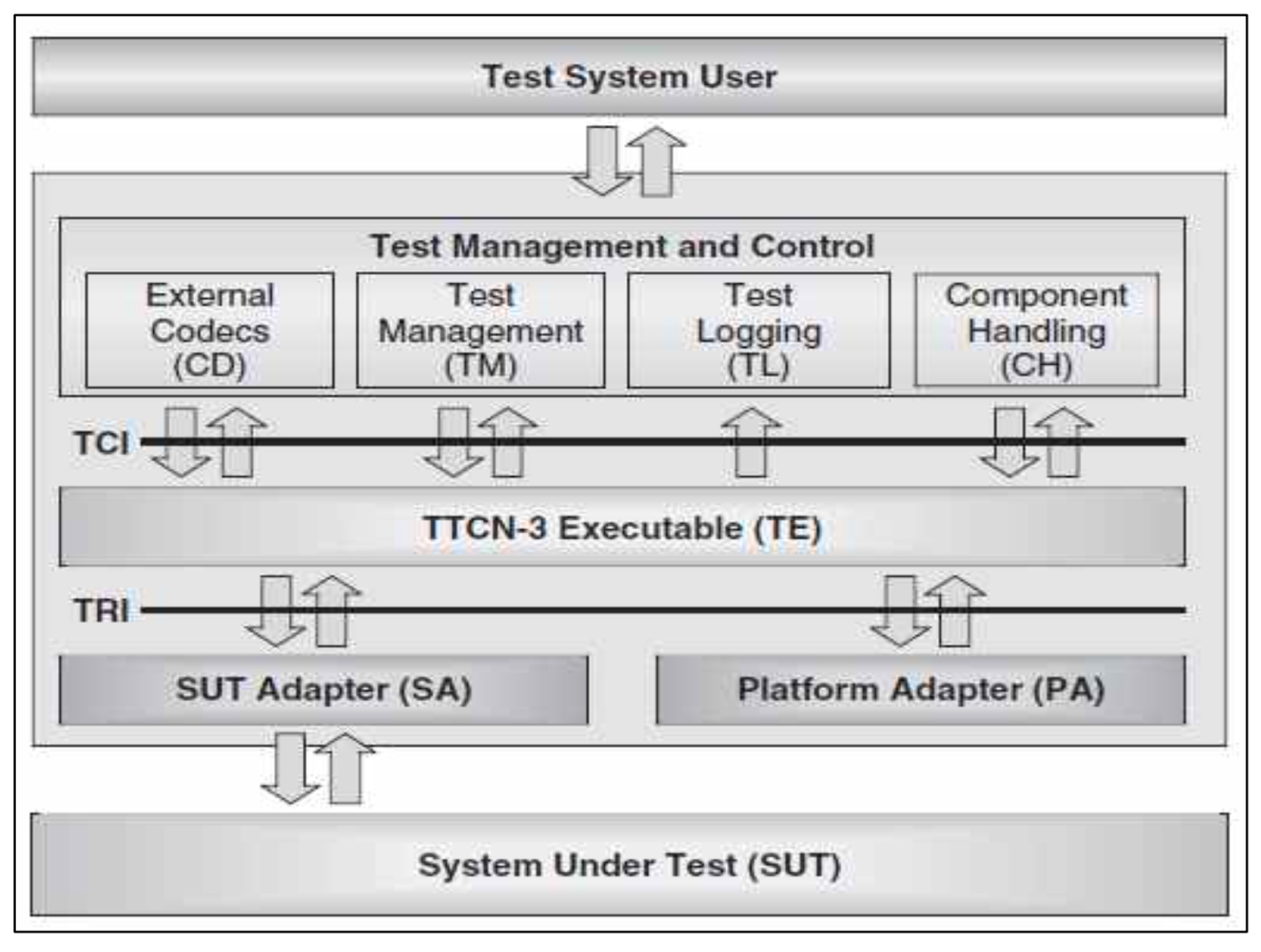
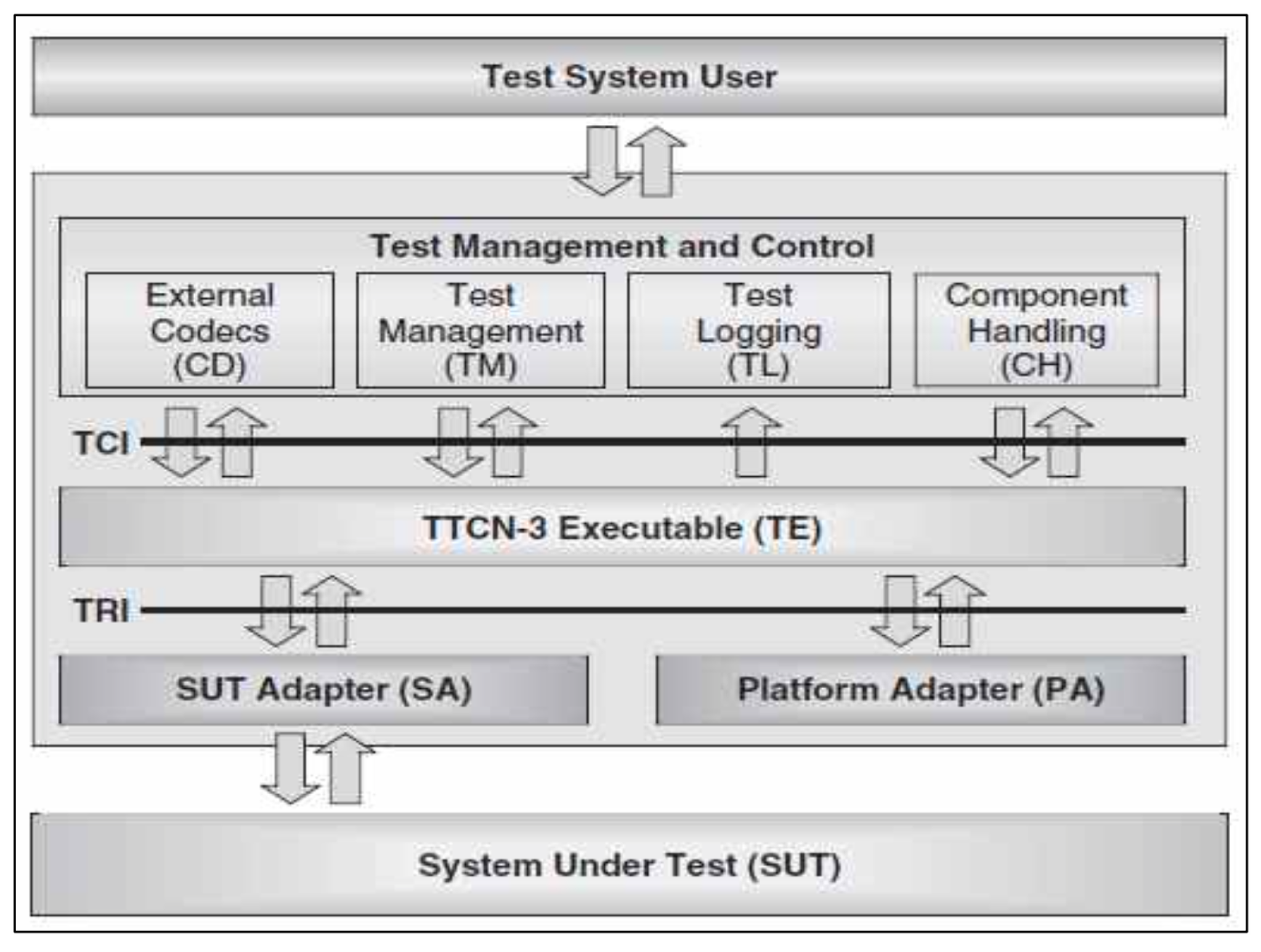
3.1. Test Language and Tools
3.2. Testing Goals
- Conformance to ISO/IEC 15118 Part 2;
- (Optional) Conformance to ISO/IEC 15118 Part 3, in particular, the SLAC protocol;
- (Optional) Conformance to IEC 61851 basic signaling;
- (Optional) Conformance to 61850-90-8 for interactions with the operator.
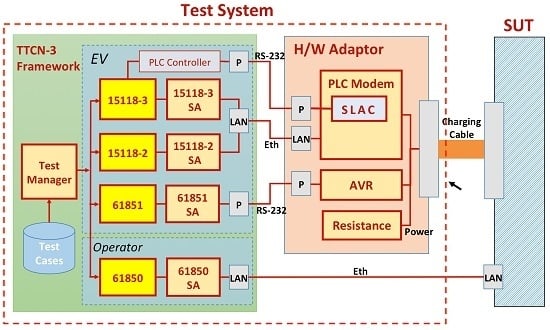
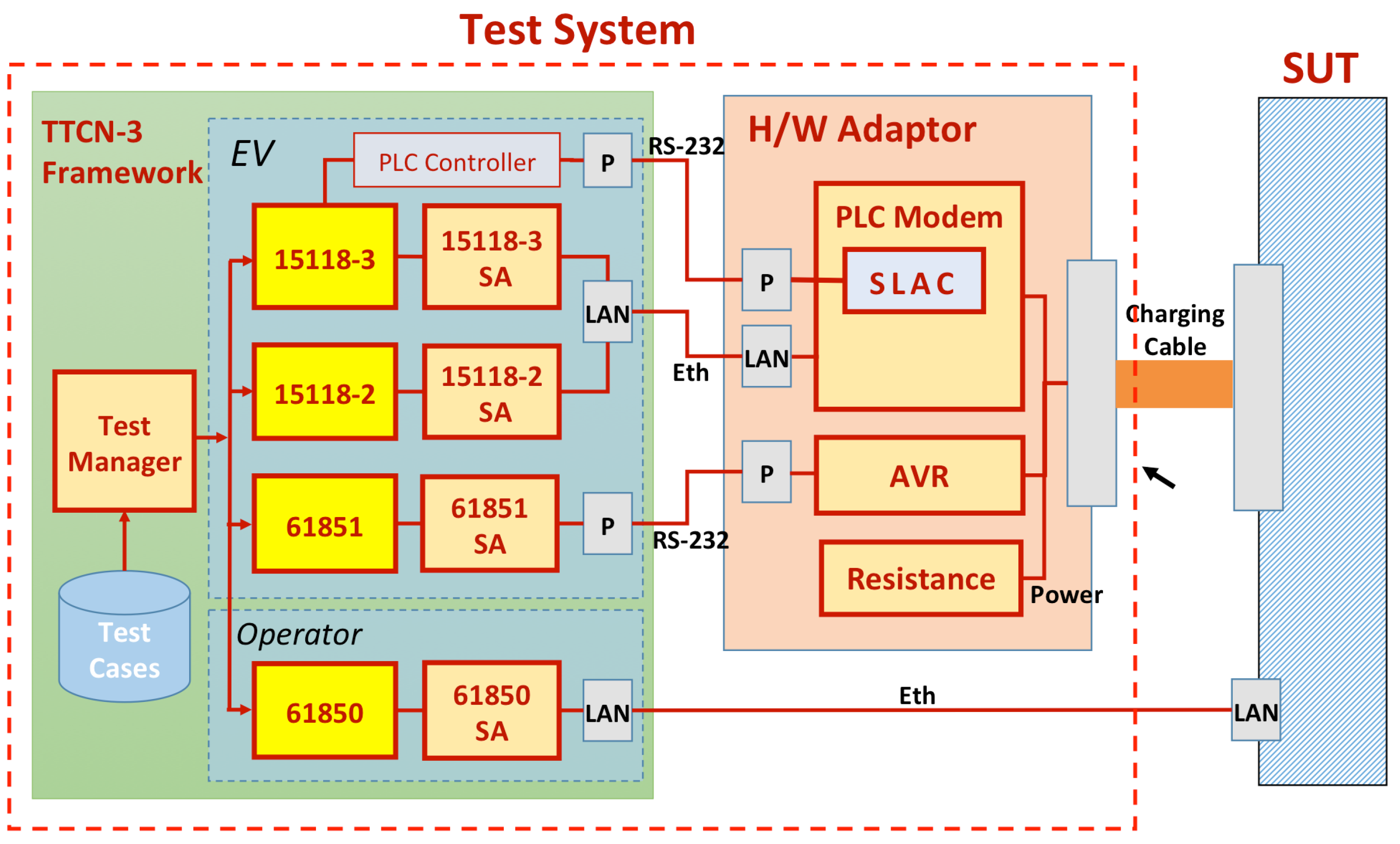
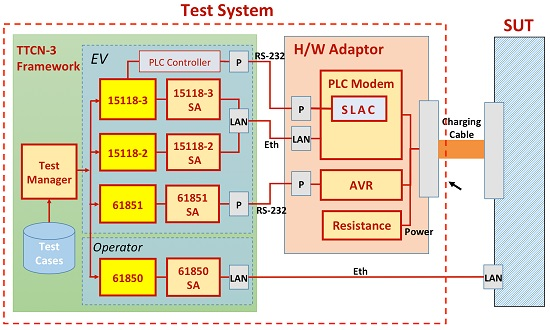
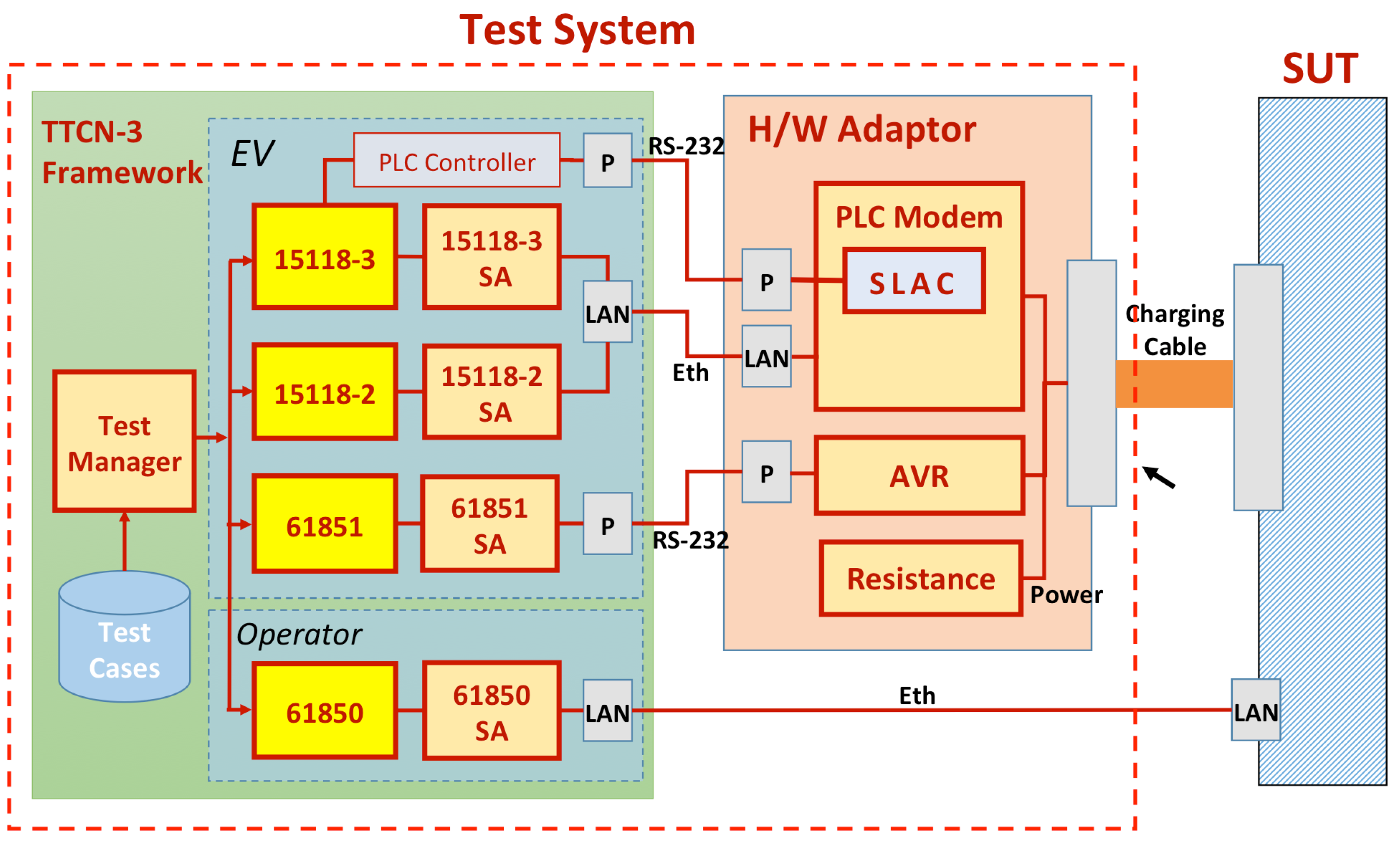
3.3. Test System Architecture
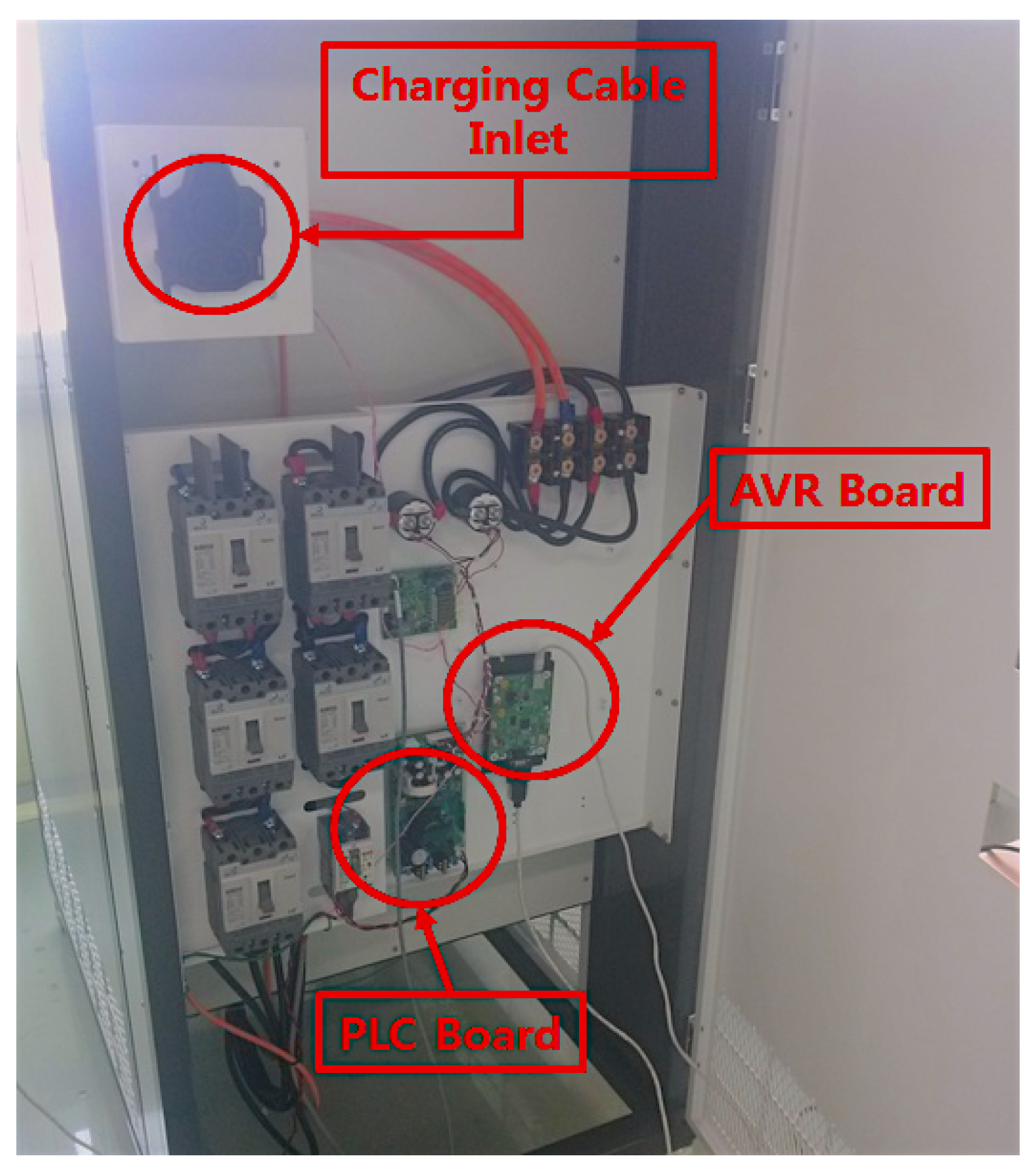
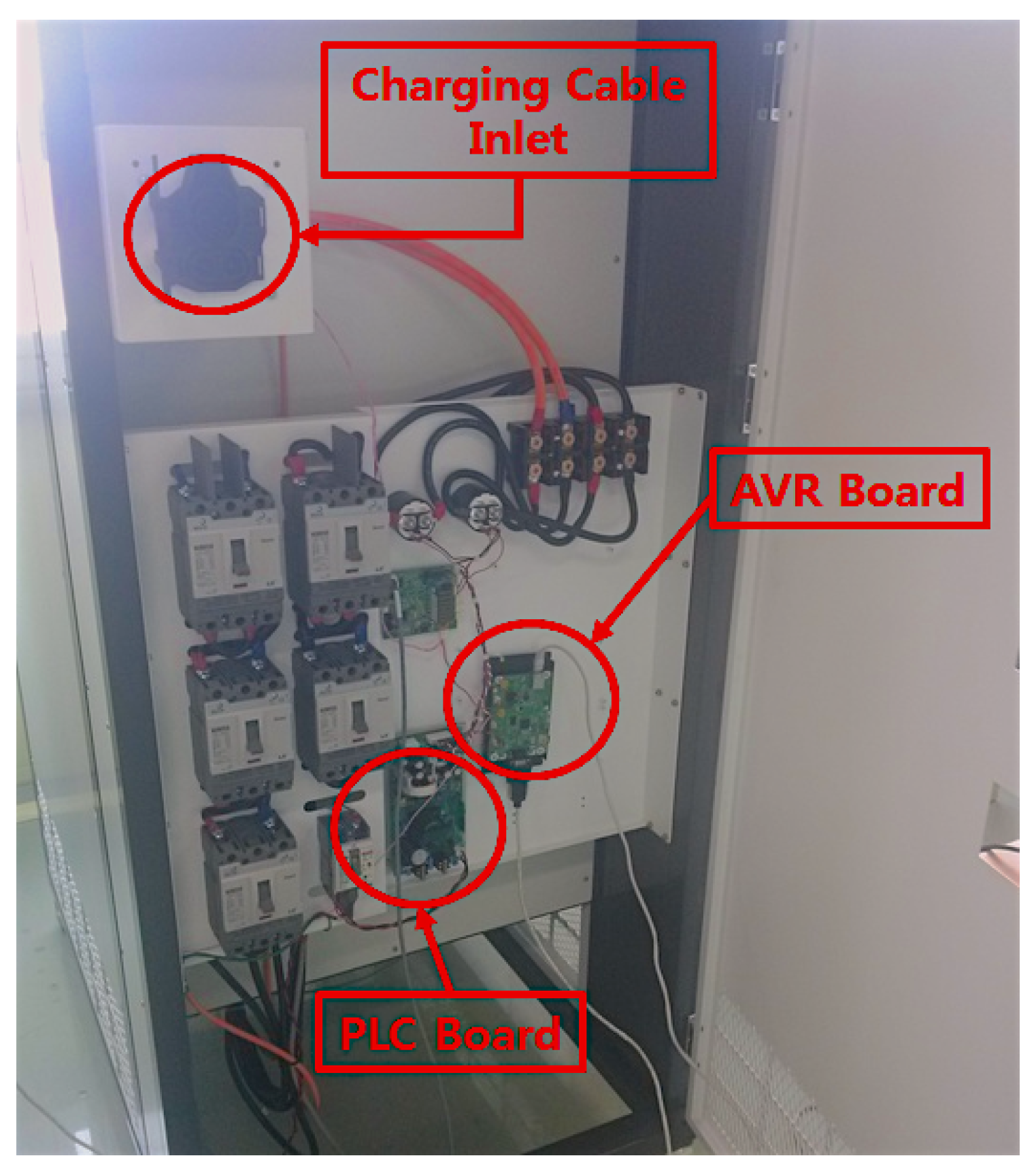
3.4. Test System Implementation
4. Evaluation
4.1. Test Case Coverage
4.2. Lab Testing Results
4.2.1. Reference Charger with High-Level Stack and IEC 61850
4.2.2. Reference Charger with Full ISO/IEC 15118 Stack
4.2.3. Results
4.3. Testival Results
4.3.1. 2014 Chicago Testival
4.3.2. 2015 Tokyo Testival Event
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Gomez Vilchez, J.J.; Jochem, P.; Fichtner, W. The Impact of Electric Vehicles on the Global Oil Demand and CO2 Emissions; WCTR: Rio, Brazil, 2013. [Google Scholar]
- Falvo, M.; Sbordone, D.; Bayram, I.; Devetsikiotis, M. EV charging stations and modes: International standards. In Proceedings of the 2014 International Symposium on Power Electronics, Electrical Drives, Automation and Motion (SPEEDAM), Ischia, Italy, 18–20 June 2014; pp. 1134–1139.
- ISO technical committee. Road Vehicles–Vehicle to grid communication interface–Part 1: General information and use-case definition; ISO Technical Committee: Geneva, Switzerland, 2013. [Google Scholar]
- ISO technical committee. Road Vehicles–Vehicle to grid communication interface–Part 2: Network and application protocol requirements; ISO Technical Committees: Geneva, Switzerland, 2014. [Google Scholar]
- ISO technical committees. Road Vehicles–Vehicle to grid communication interface–Part 3: Physical and data link layer requirements; ISO Technical Committees: Geneva, Switzerland, 2015. [Google Scholar]
- International Electrotechnical Commission. Electric vehicle conductive charging system-Part 23: DC electric vehicle charging station; International Electrotechnical Commission: Geneva, Switzerland, 2014. [Google Scholar]
- International Electrotechnical Commission. Electric vehicle conductive charging system-Part 24 : Digital communication between a d.c. EV charging station and an electric vehicle for control of d.c. charging; International Electrotechnical Commission: Geneva, Switzerland, 2014. [Google Scholar]
- International Electrotechnical Commission. Communication networks and systems for power utility automation- Part 90-8: IEC 61850 object models for electric mobility; International Electrotechnical Commission: Geneva, Switzerland, 2014. [Google Scholar]
- CHAdeMO Association. Technical Specifications of Quick Charger for the Electric Vehicle: CHAdeMO 1.0.1; CHAdeMO Association: Tokyo, Japan, 2013. [Google Scholar]
- German Institute for Standardization. Electomobility-Digital Communication Between a d.c. EV Charging Station and an Electric Vehicle for Control of d.c. Charging in the Combined Charging System; German Institute for Standardization: Berlin, German, 2014. [Google Scholar]
- HomePlug Powerline Alliance, Inc. HomePlug Green PHY Specification Release Version 1.1.1.; HomePlug Alliance: Portland, OR, USA, 2013. [Google Scholar]
- Schmutzler, J.; Wietfeld, C. Analysis of Message Sequences and Encoding Efficiency for Electric Vehicle to Grid Interconnections. In Proceedings of the 2010 IEEE Vehicular Networking Conference (VNC) 2010, Jersey City, NJ, USA, 13–15 December 2010; pp. 118–125.
- Lewandowski, C.; Gröning, S.; Schmutzler, J.; Wietfeld, C. Performance evaluation of PLC over the IEC 61851 control pilot signal. In 5th Workshop on Power Line Communications; IEEE: Arnhem, The Netherlands, 2011. [Google Scholar]
- Käbisch, S.; Schmitt, A.; Winter, M.; Heuer, J. Interconnections and communications of electric vehicles and smart grids. In Proceedings of the 2010 First IEEE International Conference on Smart Grid Communications (SmartGridComm), Gaithersburg, MD, USA, 4–6 October 2010; pp. 161–166.
- ISO technical committee. Road Vehicles–Vehicle to grid communication interface–Part 4: Network and application protocol conformance test; ISO Technical Committee: Geneva, Switzerland, 2015. [Google Scholar]
- ISO Technical Committee. Road Vehicles–Vehicle to grid communication interface–Part 5: Physical layer and data link layer conformance test; ISO Technical Committee: Geneva, Switzerland, 2015. [Google Scholar]
- Groning, S.; Lewandowski, C.; Schmutzler, J.; Wietfeld, C. Interoperability testing based on TTCN-3 for V2G communication interfaces. In Proceedings of the 2012 International Conference on Connected Vehicles and Expo (ICCVE), Beijing, China, 12–16 December 2012; pp. 298–303.
- Hansch, K.; Pelzer, A.; Komarnicki, P.; Groning, S.; Schmutzler, J.; Wietfeld, C.; Heuer, J.; Muller, R. An ISO/IEC 15118 conformance testing system architecture. In Proceedings of the 2014 IEEE PES General Meeting/Conference Exposition, National Harbor, MD, USA, 27–31 July 2014; pp. 1–5.
- Kim, I.; Al-Hilo, A.; Jang, H.S.; Yoo, J.G. Conformance testing of SGSF-064-1 using CANoe. Korean Inst. Electr. Eng. 2015, 5, 1086–1101. [Google Scholar] [CrossRef]
- Kim, I.; Awan, T.W.; Abed, A.M.; Jang, H.S. Conformance testing of SGSF-064-1. Adv. Mater. Mech. Ind. Eng. 2014, 598, 704–708. [Google Scholar] [CrossRef]
- Awan, T.W.; Abed, A.M.; Kim, I.; Jang, H.S.; Shin, M. CAN based conformance testing using TTCN-3. Int. J. Comput. Commun. Eng. 2014, 3, 417–423. [Google Scholar] [CrossRef]
- ISO Technical Committee. Road vehicles-Controller area network(CAN); ISO Technical Committee: Geneva, Switzerland, 2015. [Google Scholar]
- SAE International. SAE Electric Vehicle and Plug in Hybrid Electric Vehicle Conductive Charge Coupler; SAE International: Warrendale, PA, USA; Troy, MI, USA, 2013. [Google Scholar]
- Ah, H.; Minho, S.; Intaek, K.; Hyuk-Soo, J. A study on communication controller of electric vehicle supply equipment for information exchange between electric vehicle and power grid. Korean Inst. Electr. Eng. 2014, 63, 1564–1570. [Google Scholar]
- European Telecommunications Standards Institute. Methods for Testing and Specification (MTS); The Testing and Test Control Notation Version 3; European Telecommunications Standards Institute: Sophia Antipolis, France, 2012. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Our Test System | ISO/IEC 15118 (Parts 4 and 5) |
|---|---|---|
| ISO/IEC 15118-2 DC | 16 | 13 |
| ISO/IEC 15118-2 AC | 0 | 1 |
| IEC 61851 (Basic signaling) | 3 | 3 |
| IEC 61850-90-8 (EVSE-Grid) | 7 | 0 |
| HPGP SLAC | 3 | 5 |
| Total | 29 | 22 |
| No. | Test case | B | Target | Protocol | Verdict |
|---|---|---|---|---|---|
| 1 | 15118-TC1 | SECC Discovery Protocol (SDP) | EVCC | IEC/ISO15118 | Pass |
| 2 | 15118-TC2 | Supported Application Protocol | EVCC | IEC/ISO15118 | Pass |
| 3 | 15118-TC3 | Session Setup Message | EVCC | IEC/ISO15118 | Pass |
| 4 | 15118-TC4 | Service Discovery | EVCC | IEC/ISO15118 | Pass |
| 5 | 15118-TC5 | Payment Service Selection | EVCC | IEC/ISO15118 | Pass |
| 6 | 15118-TC6 | Payment Details | EVCC | IEC/ISO15118 | Pass |
| 7 | 15118-TC7 | Authorization | EVCC | IEC/ISO15118 | Pass |
| 8 | 15118-TC8 | Charge parameter Discovery | EVCC | IEC/ISO15118 | Pass |
| 9 | 15118-TC9 | Cable Check | EVCC | IEC/ISO15118 | Pass |
| 10 | 15118-TC10 | PreCharge | EVCC | IEC/ISO15118 | Pass |
| 11 | 15118-TC11 | Power Delivery (Start) | EVCC | IEC/ISO15118 | Pass |
| 12 | 15118-TC12 | Current Demand | EVCC | IEC/ISO15118 | Pass |
| 13 | 15118-TC13 | Power Delivery (Stop) | EVCC | IEC/ISO15118 | Pass |
| 14 | 15118-TC14 | Welding Detection | EVCC | IEC/ISO15118 | Pass |
| 15 | 15118-TC15 | Session Stop | EVCC | IEC/ISO15118 | Pass |
| 16 | 15118-NTC1 | Power Delivery (Negative) | EVCC | IEC/ISO15118 | Pass |
| 17 | 61850-TC1 | Connection Check | EVCC | IEC 61850 | Pass |
| 18 | 61850-TC2 | TCP/IP Connection Report | EVCC | IEC 61850 | Pass |
| 19 | 61850-TC3 | Session Setup Check | EVCC | IEC 61850 | Pass |
| 20 | 61850-TC4 | Charge Parameter Discovery Report | EVCC | IEC 61850 | Pass |
| 21 | 61850-TC5 | PreCharge Report | EVCC | IEC 61850 | Pass |
| 22 | 61850-TC6 | Current Demand Report | EVCC | IEC 61850 | Pass |
| 23 | 61850-TC7 | Welding Detection Report | EVCC | IEC 61850 | Pass |
| No. | Test case | Contents | Target | Protocol | Verdict |
|---|---|---|---|---|---|
| 1 | SLAC-TC1 | Slack Parameter Exchange | EVCC | HPGP | Pass |
| 2 | SLAC-TC2 | Signal Strength Measurement | EVCC | HPGP | Pass |
| 2 | SLAC-TC3 | Logical Network Parameter Exchange | EVCC | HPGP | Pass |
| 4 | 61851-TC1 | Control Pilot Voltage Range | EVCC | IEC 61851 | Pass |
| 5 | 61851-TC2 | Control Pilot Frequency Range | EVCC | IEC 61851 | Pass |
| 6 | 61851-TC3 | Control Pilot Duty Cycle Range | EVCC | IEC 61851 | Pass |
| 7 | 15118-TC1 | SECC Discovery Protocol (SDP) | EVCC | IEC/ISO15118 | Pass |
| 8 | 15118-TC2 | Supported Application Protocol | EVCC | IEC/ISO15118 | Pass |
| 9 | 15118-TC3 | Session Setup Message | EVCC | IEC/ISO15118 | Pass |
| 10 | 15118-TC4 | Service Discovery | EVCC | IEC/ISO15118 | Pass |
| 11 | 15118-TC5 | Payment Service Selection | EVCC | IEC/ISO15118 | Pass |
| 12 | 15118-TC6 | Payment Details | EVCC | IEC/ISO15118 | Pass |
| 13 | 15118-TC7 | Authorization | EVCC | IEC/ISO15118 | Pass |
| 14 | 15118-TC8 | Charge parameter Discovery | EVCC | IEC/ISO15118 | Pass |
| 15 | 15118-TC9 | Cable Check | EVCC | IEC/ISO15118 | Pass |
| 16 | 15118-TC10 | PreCharge | EVCC | IEC/ISO15118 | Pass |
| 17 | 15118-TC11 | Power Delivery (Start) | EVCC | IEC/ISO15118 | Pass |
| 18 | 15118-TC12 | Current Demand | EVCC | IEC/ISO15118 | Pass |
| 19 | 15118-TC13 | Power Delivery (Stop) | EVCC | IEC/ISO15118 | Pass |
| 20 | 15118-TC14 | Welding Detection | EVCC | IEC/ISO15118 | Pass |
| 21 | 15118-TC15 | Session Stop | EVCC | IEC/ISO15118 | Pass |
| 22 | 15118-NTC1 | Power Delivery (Negative) | EVCC | IEC/ISO15118 | Pass |
| Counterpart | Scenario | Results |
|---|---|---|
| A | ISO/IEC 15118 DC charging | Wrong SLAC version detected |
| SupportedAppProtocolRes not received | ||
| Wrong ChargeParameterDiscoveryRes was received | ||
| B | ISO/IEC 15118 DC charging | Tester sent a wrong SLAC message |
| Tester’s incorrect behavior detected during SessionSetup | ||
| Tester’s incorrect behavior detected during CableCheck | ||
| C | ISO/IEC 15118 DC charging | Failed after SDP |
| D | DIN70121 DC charging | Failed after SupportedAppProtocolRes |
| E | ISO/IEC 15118 DC charging | Unknown error occurred during SLAC |
| SDP response was not received | ||
| Authorization response was not received |
| Counterpart | Scenario | Results |
|---|---|---|
| A | DIN 70121 DC charging | Wrong SLAC message was received |
| Failed after SupportedAppProtocolRes | ||
| B | ISO/IEC 15118 DC charging | Success |
| C | ISO/IEC 15118 DC charging | SLAC timing problem detected |
| D | DIN 70121 DC charging | Failed after SupportedAppProtocolRes |
| E | ISO/IEC 15118 DC charging | Success |
| F | DIN 70121 DC charging | Failed after SupportedAppProtocolRes |
| G | ISO/IEC 15118 DC charging | Success |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shin, M.; Kim, H.; Kim, H.; Jang, H. Building an Interoperability Test System for Electric Vehicle Chargers Based on ISO/IEC 15118 and IEC 61850 Standards. Appl. Sci. 2016, 6, 165. https://doi.org/10.3390/app6060165
Shin M, Kim H, Kim H, Jang H. Building an Interoperability Test System for Electric Vehicle Chargers Based on ISO/IEC 15118 and IEC 61850 Standards. Applied Sciences. 2016; 6(6):165. https://doi.org/10.3390/app6060165
Chicago/Turabian StyleShin, Minho, Hwimin Kim, Hyoseop Kim, and Hyuksoo Jang. 2016. "Building an Interoperability Test System for Electric Vehicle Chargers Based on ISO/IEC 15118 and IEC 61850 Standards" Applied Sciences 6, no. 6: 165. https://doi.org/10.3390/app6060165
APA StyleShin, M., Kim, H., Kim, H., & Jang, H. (2016). Building an Interoperability Test System for Electric Vehicle Chargers Based on ISO/IEC 15118 and IEC 61850 Standards. Applied Sciences, 6(6), 165. https://doi.org/10.3390/app6060165