
Visual Recognition and Its Application to Robot Arm Control

Abstract
:
1. Introduction
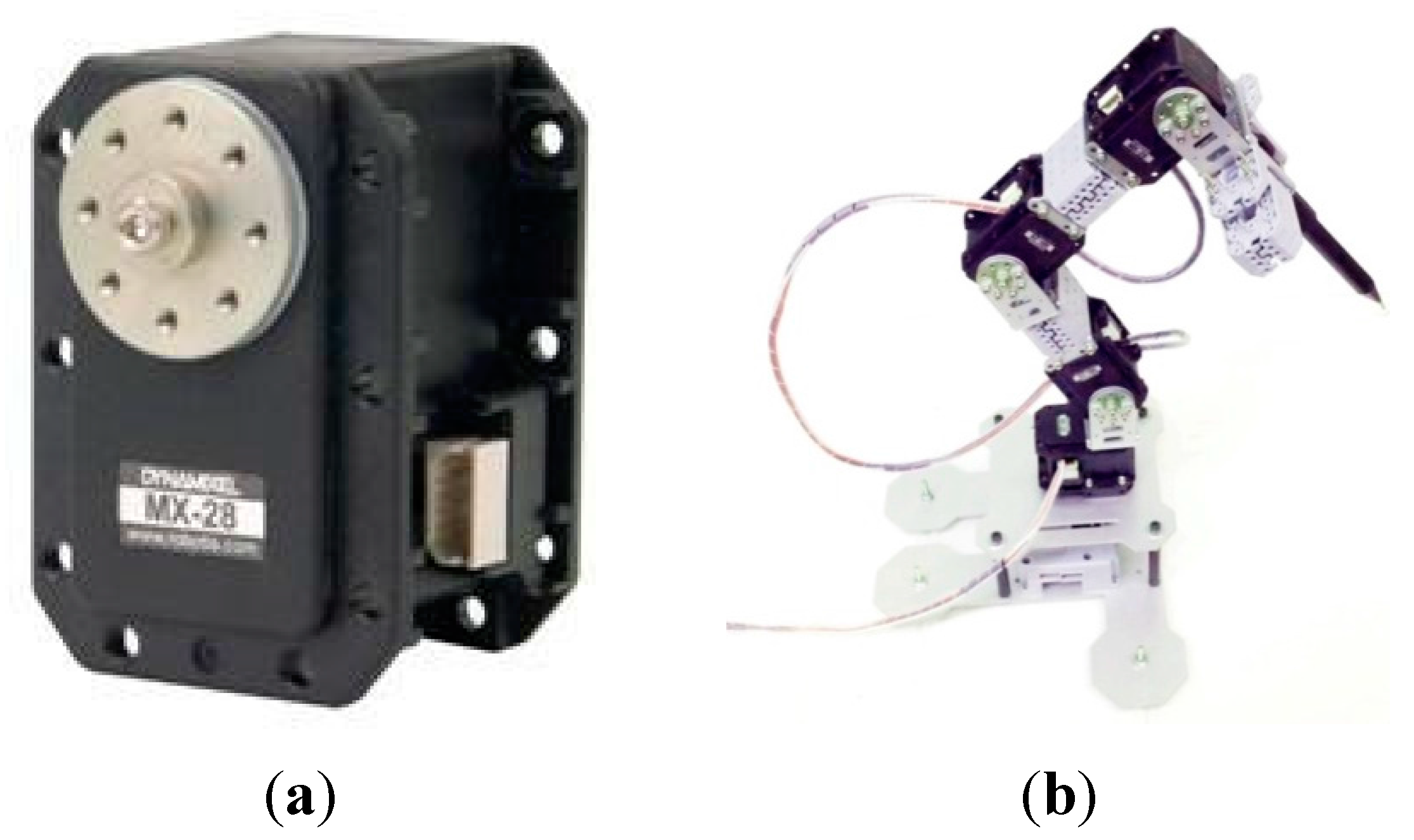
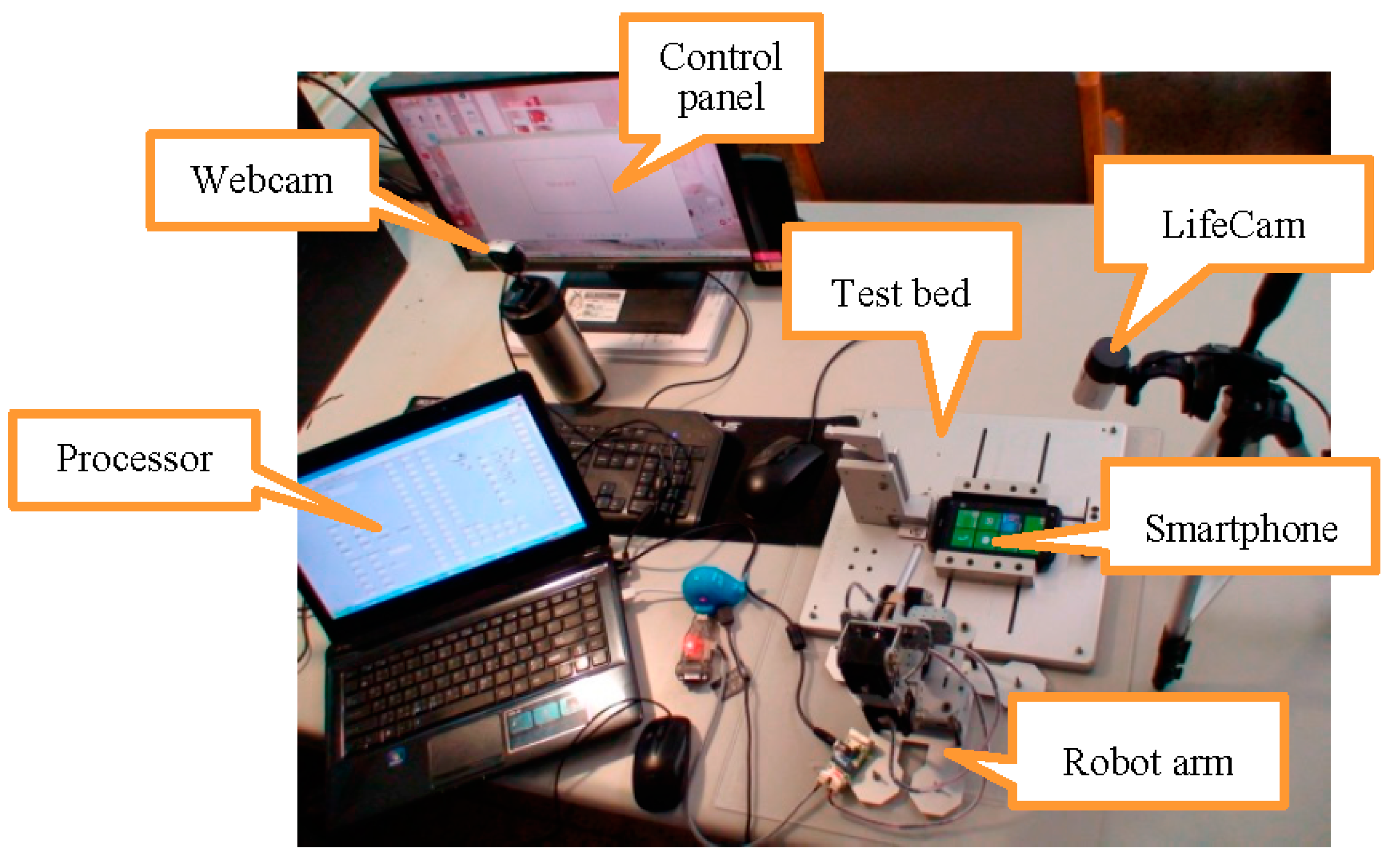
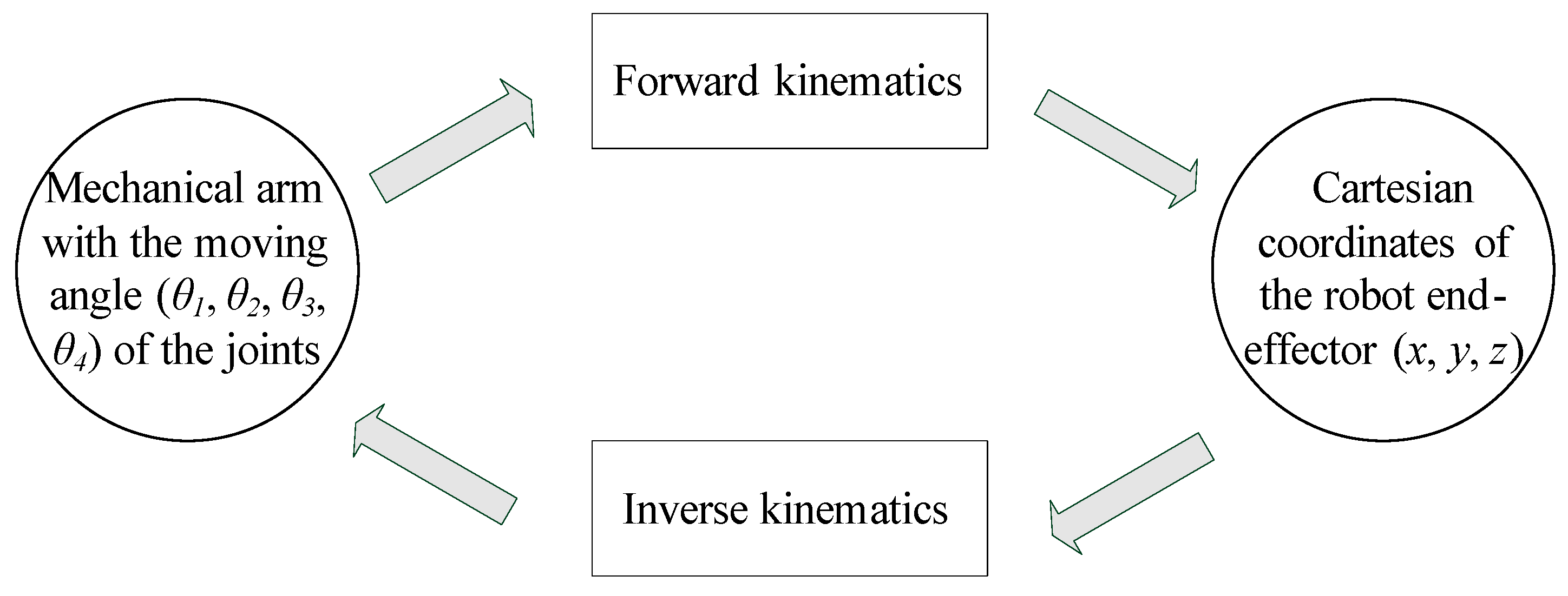
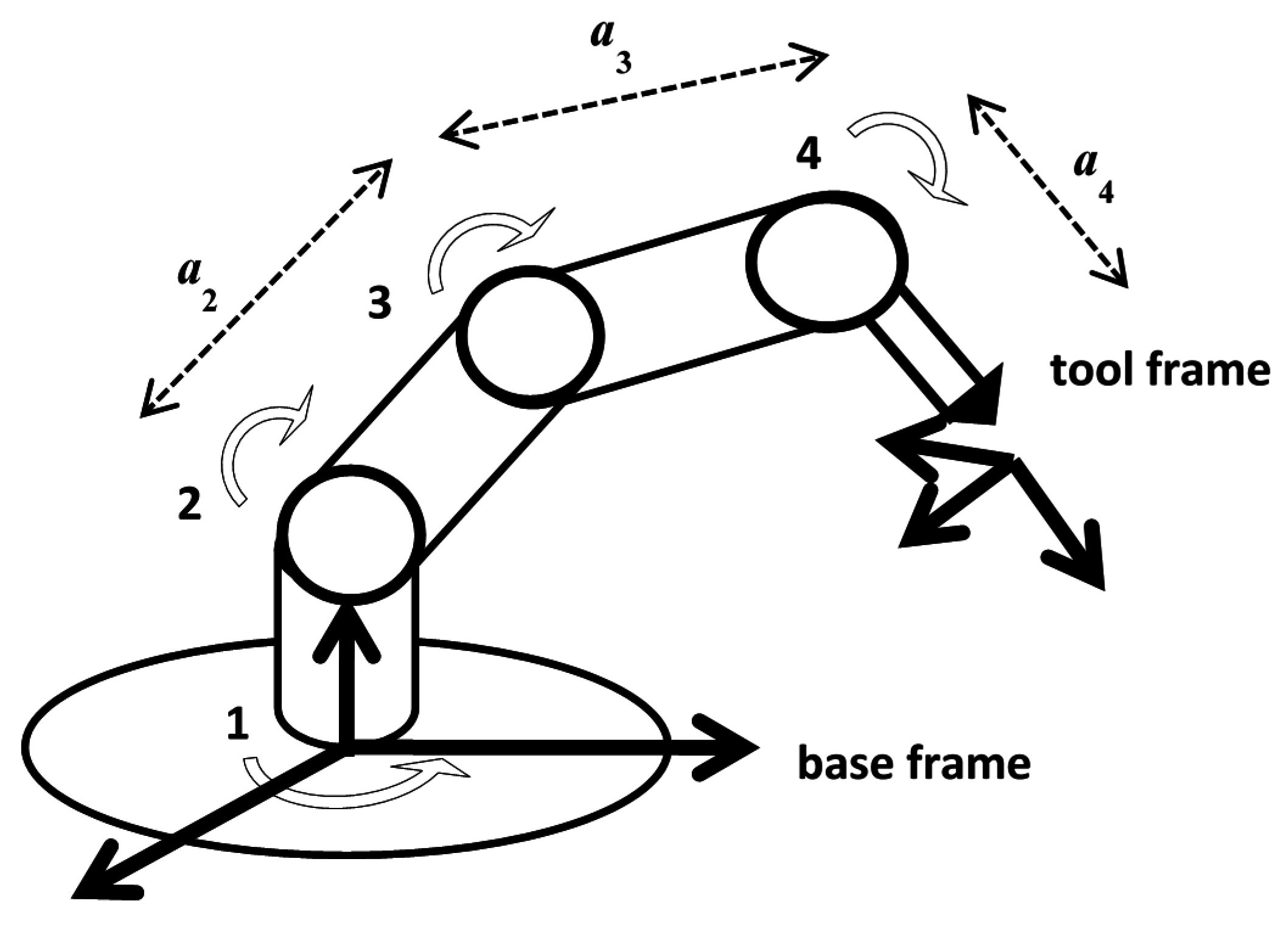
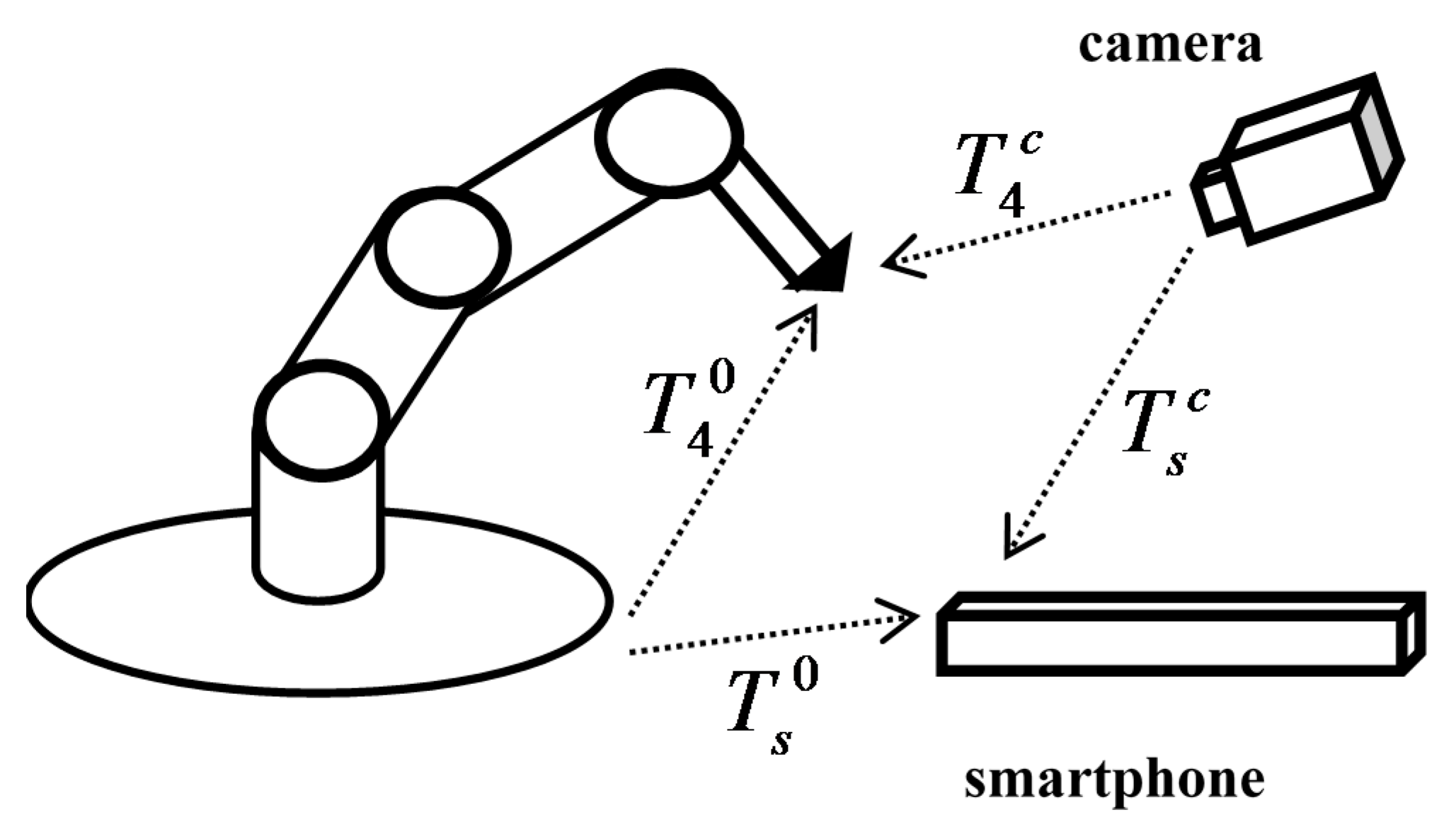
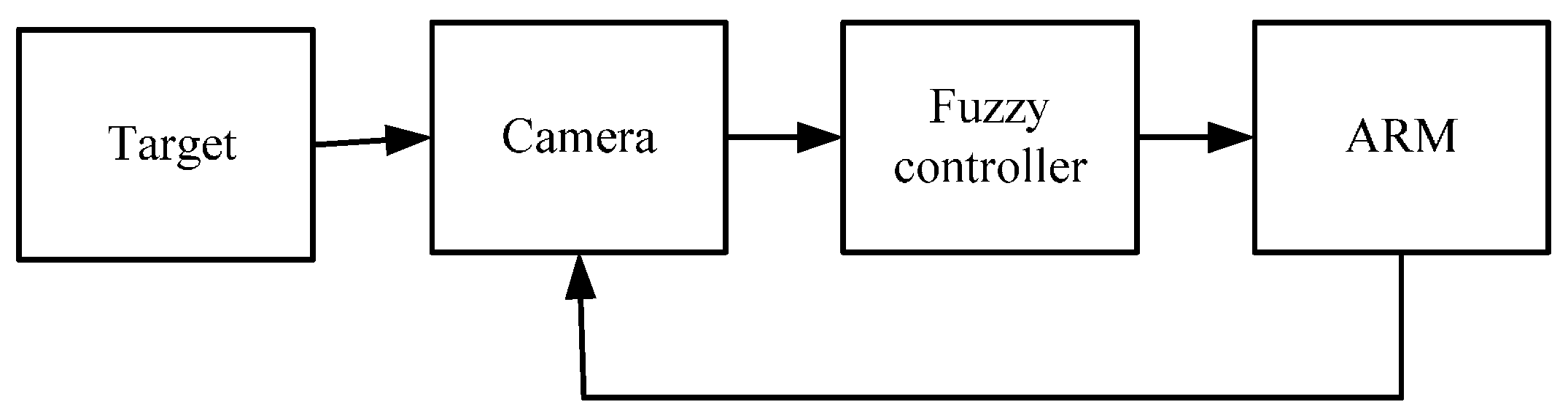
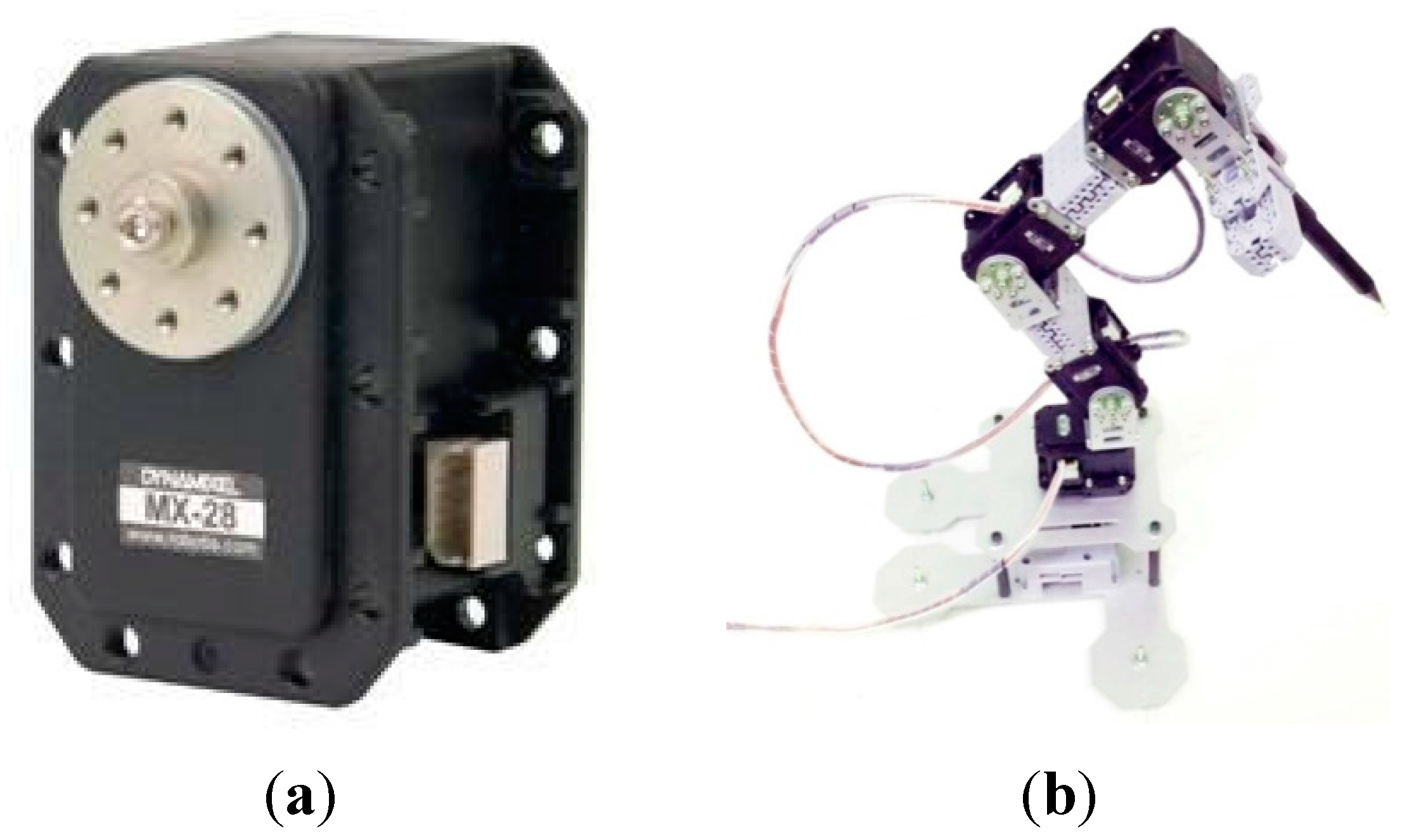
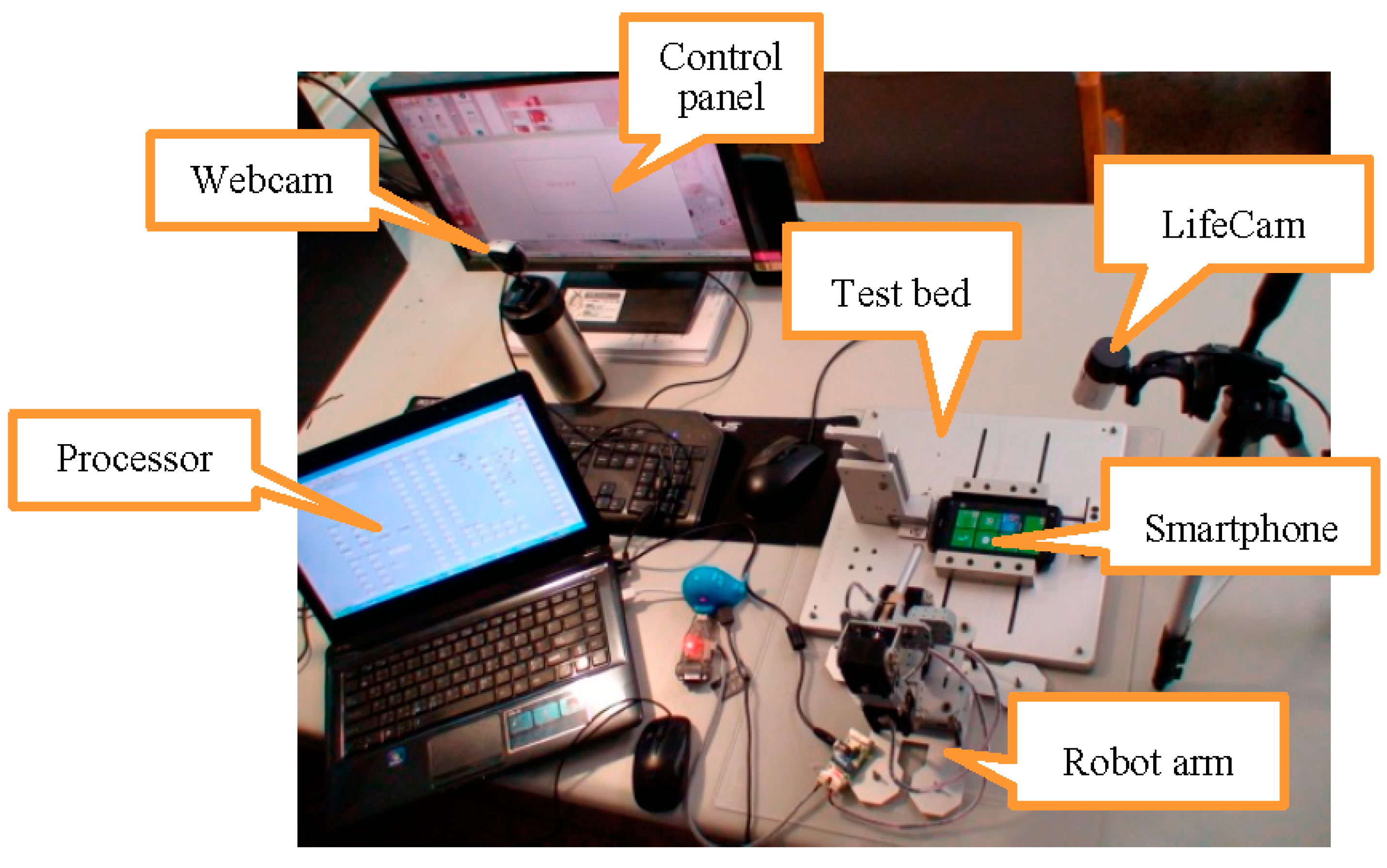
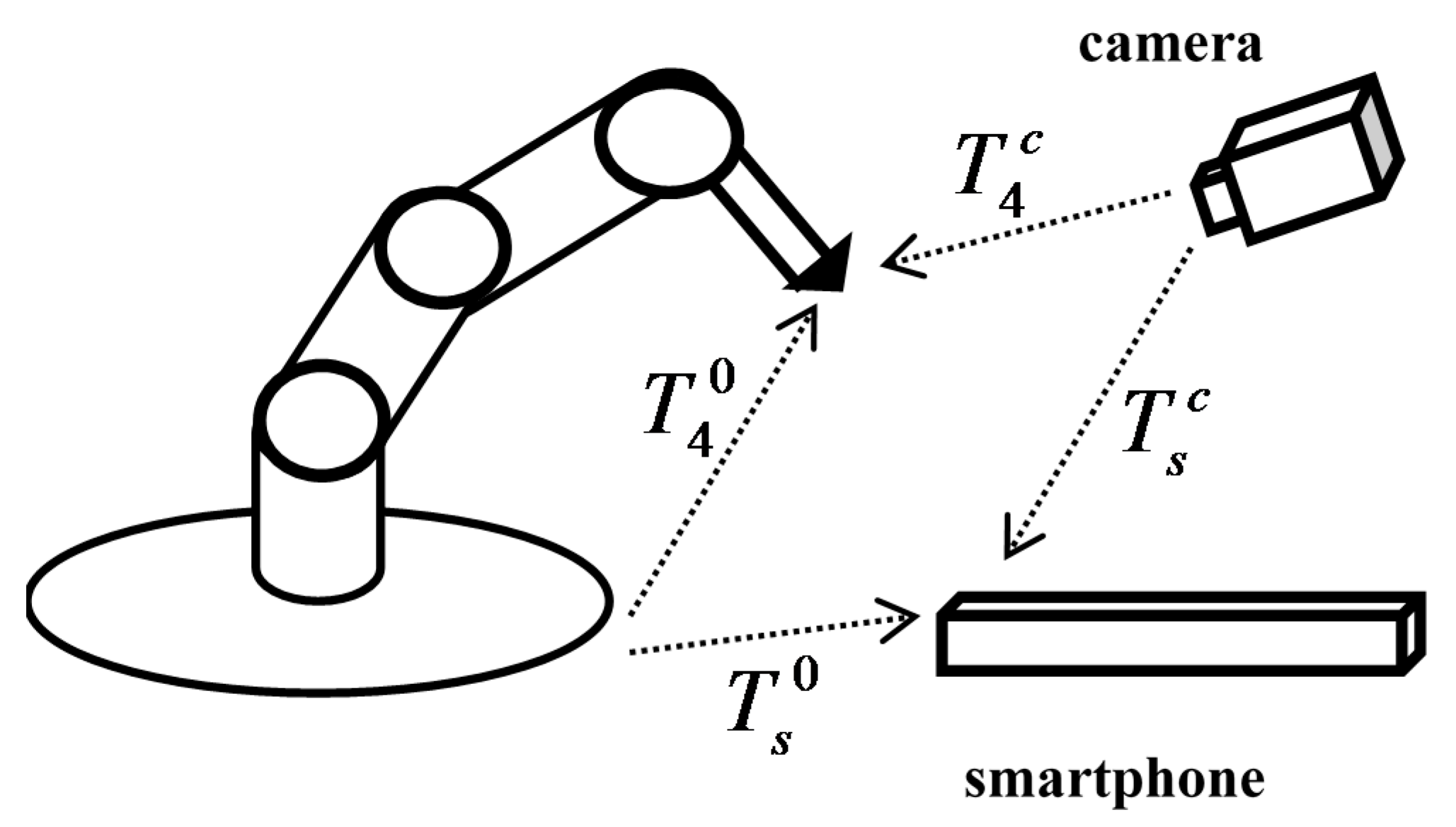
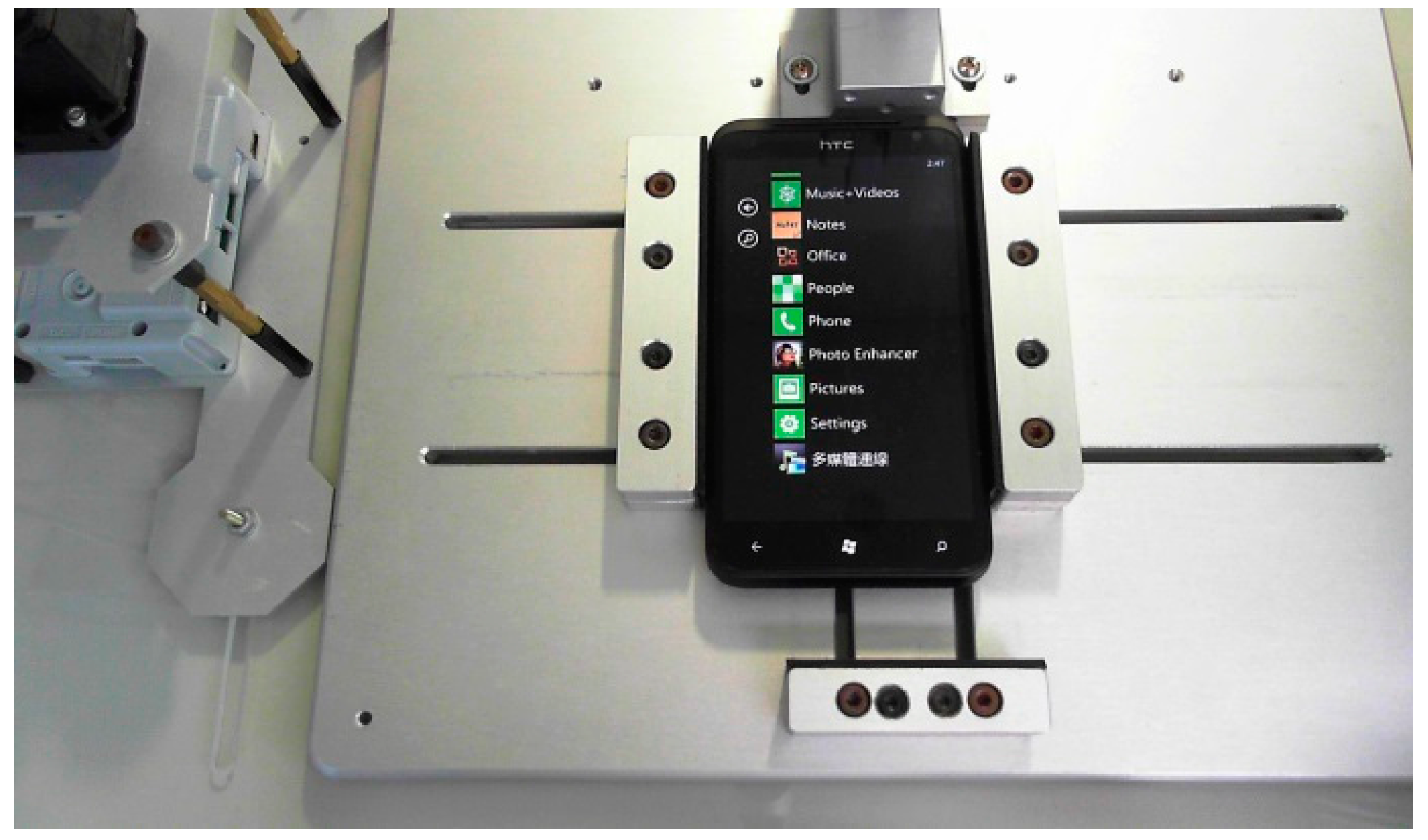
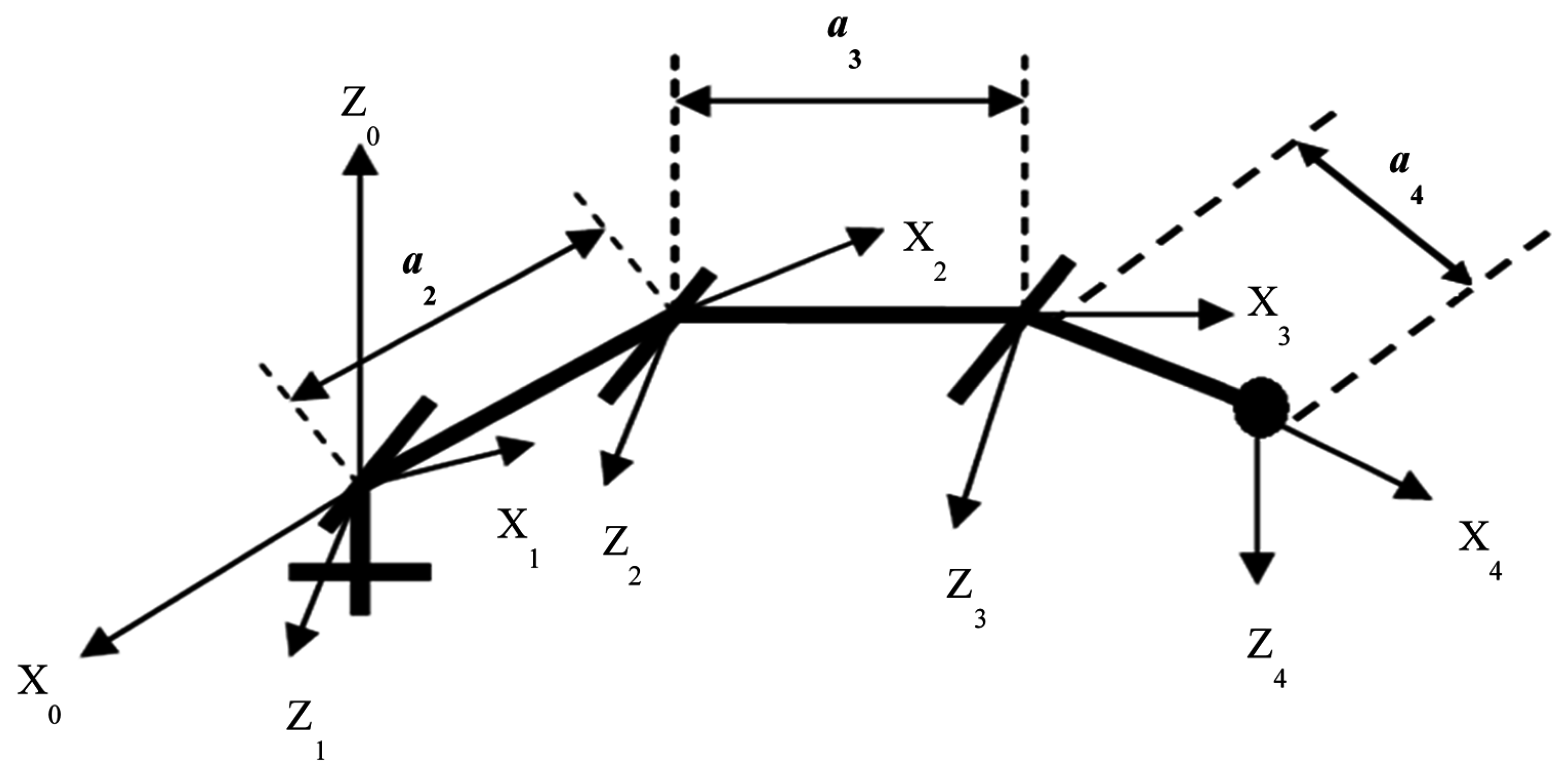
2. System Setup

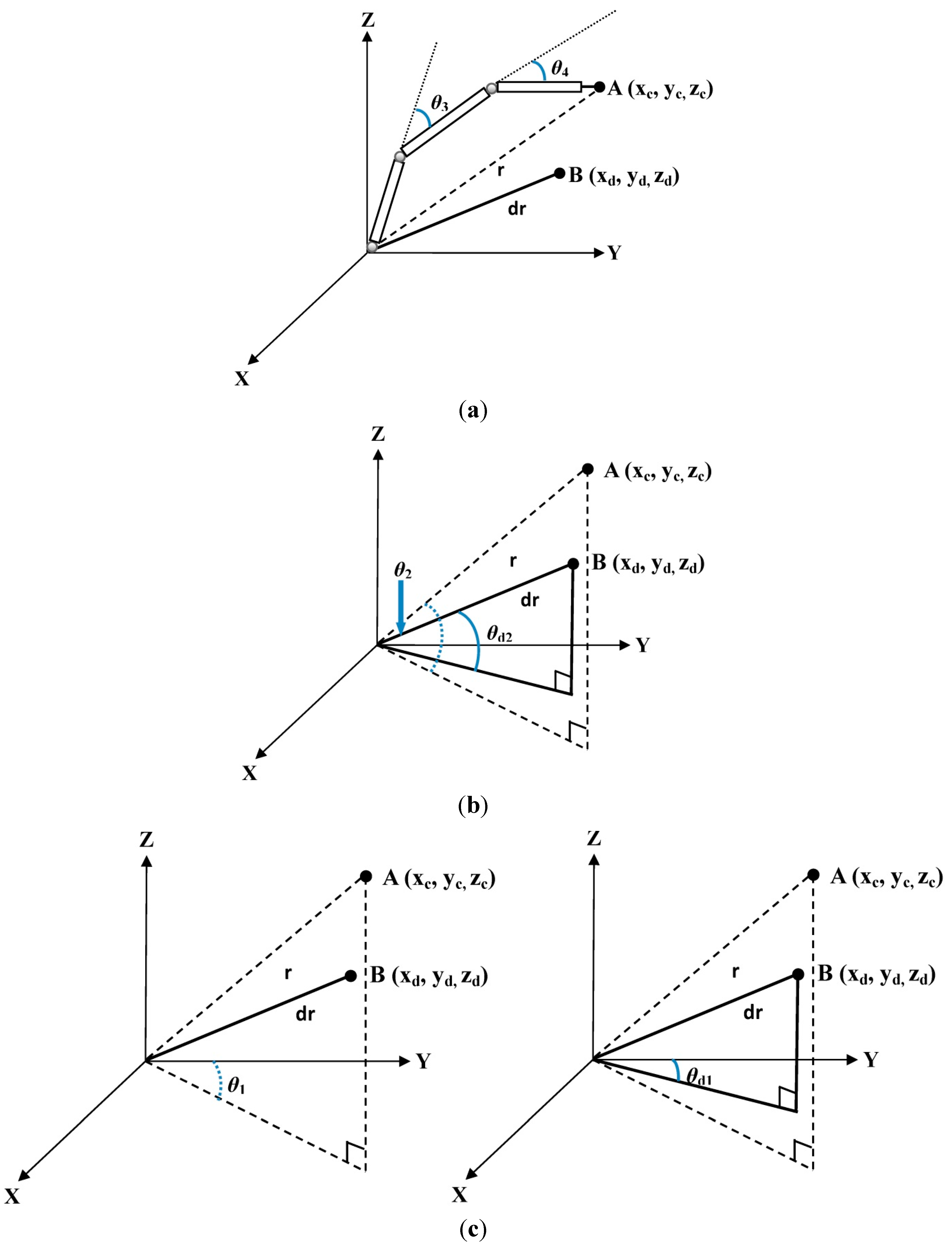
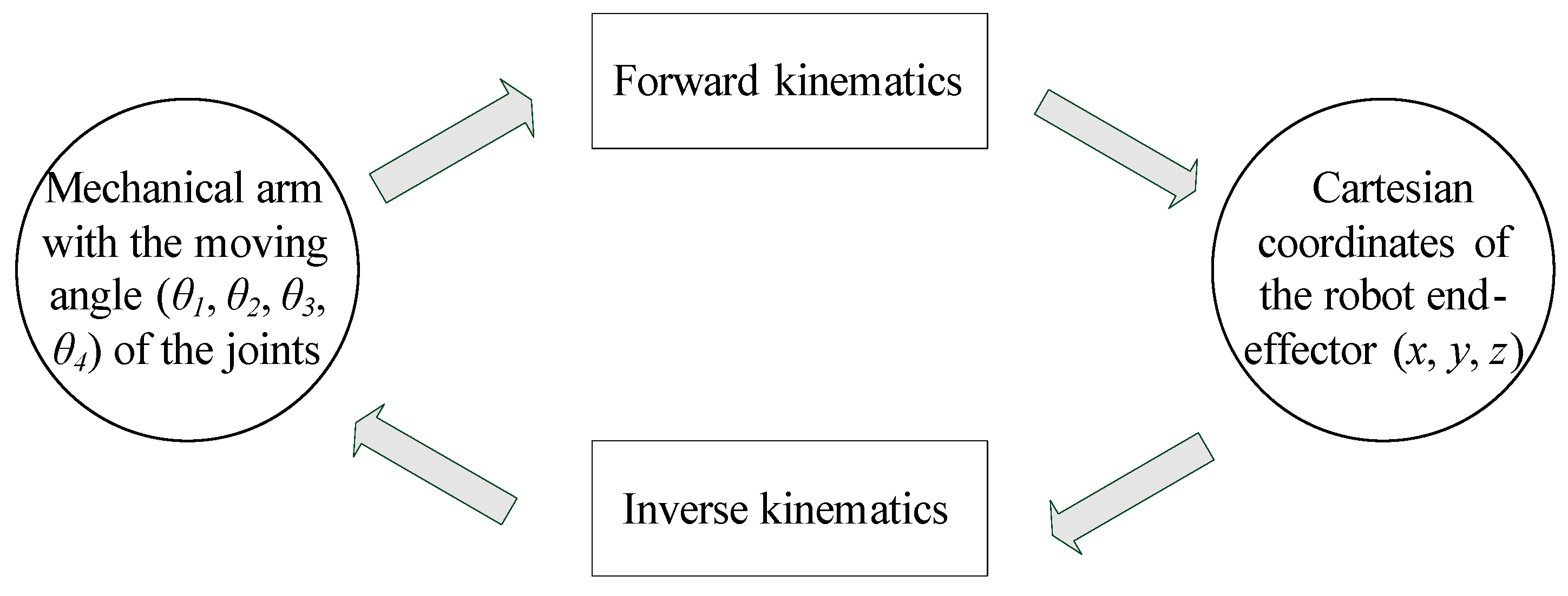
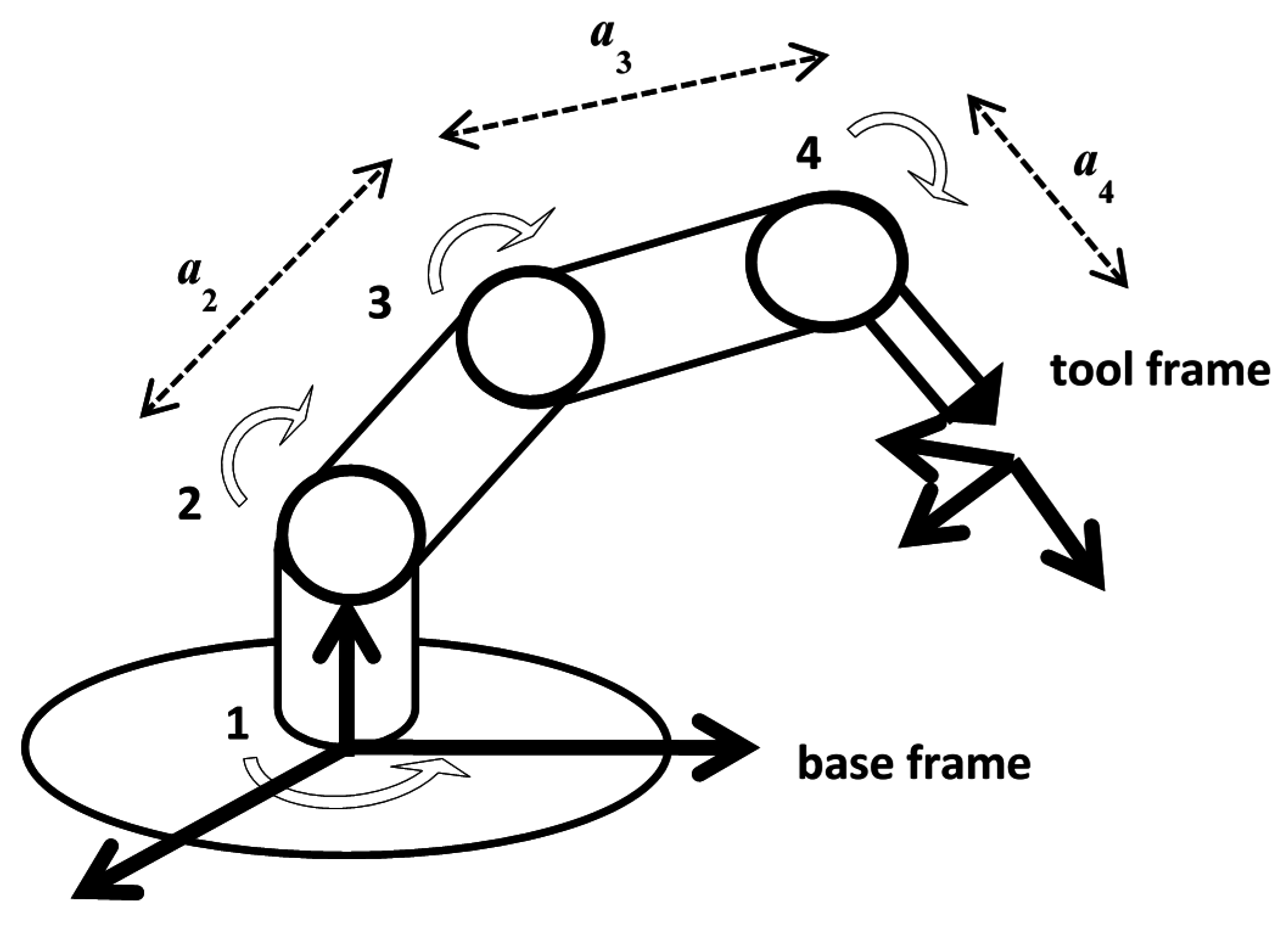
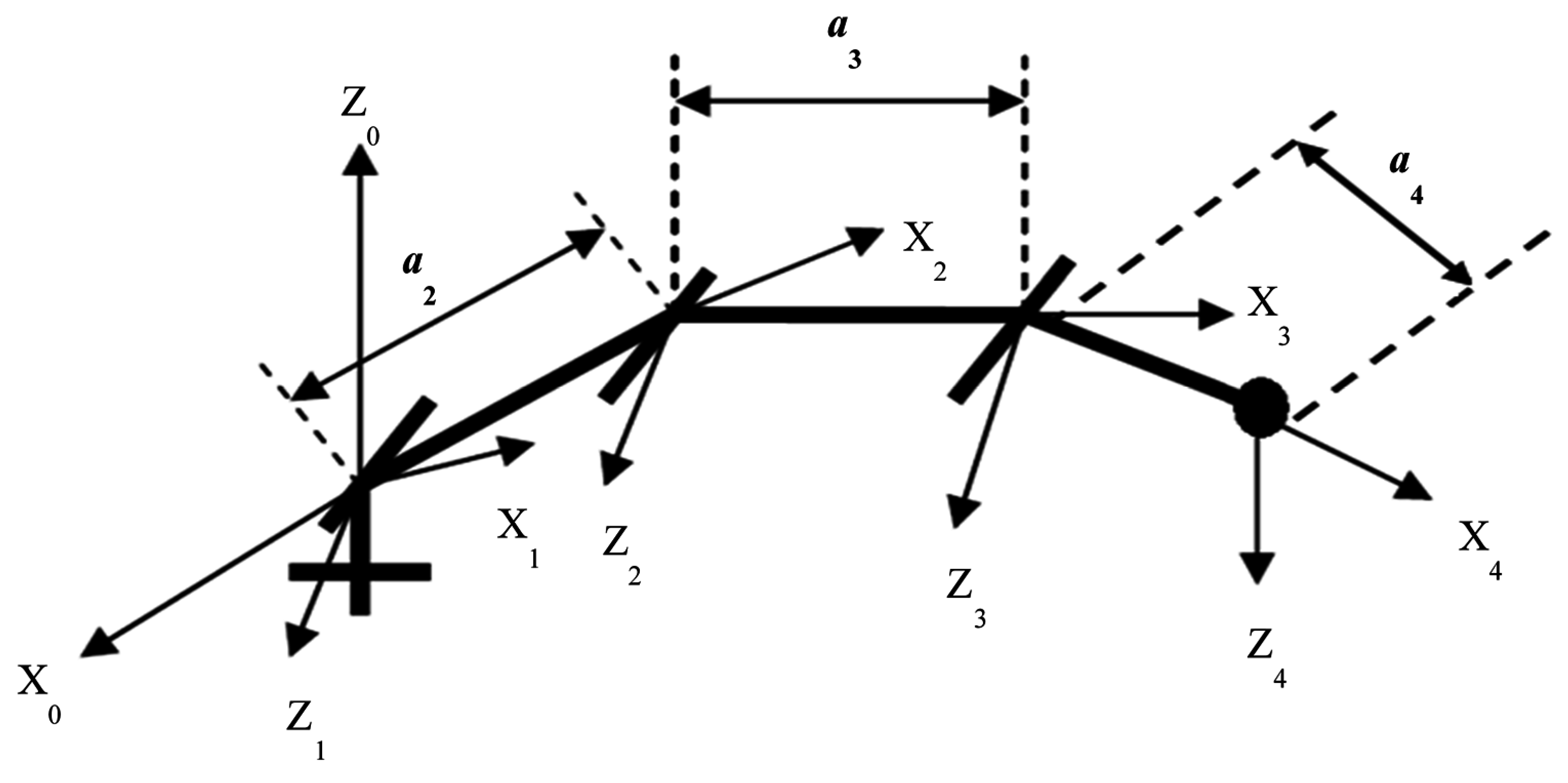
- Two neighboring joint relations: the link length ai and the link twist angle αi.
- Two neighboring link relations: the link offset di and the joint angle θi.
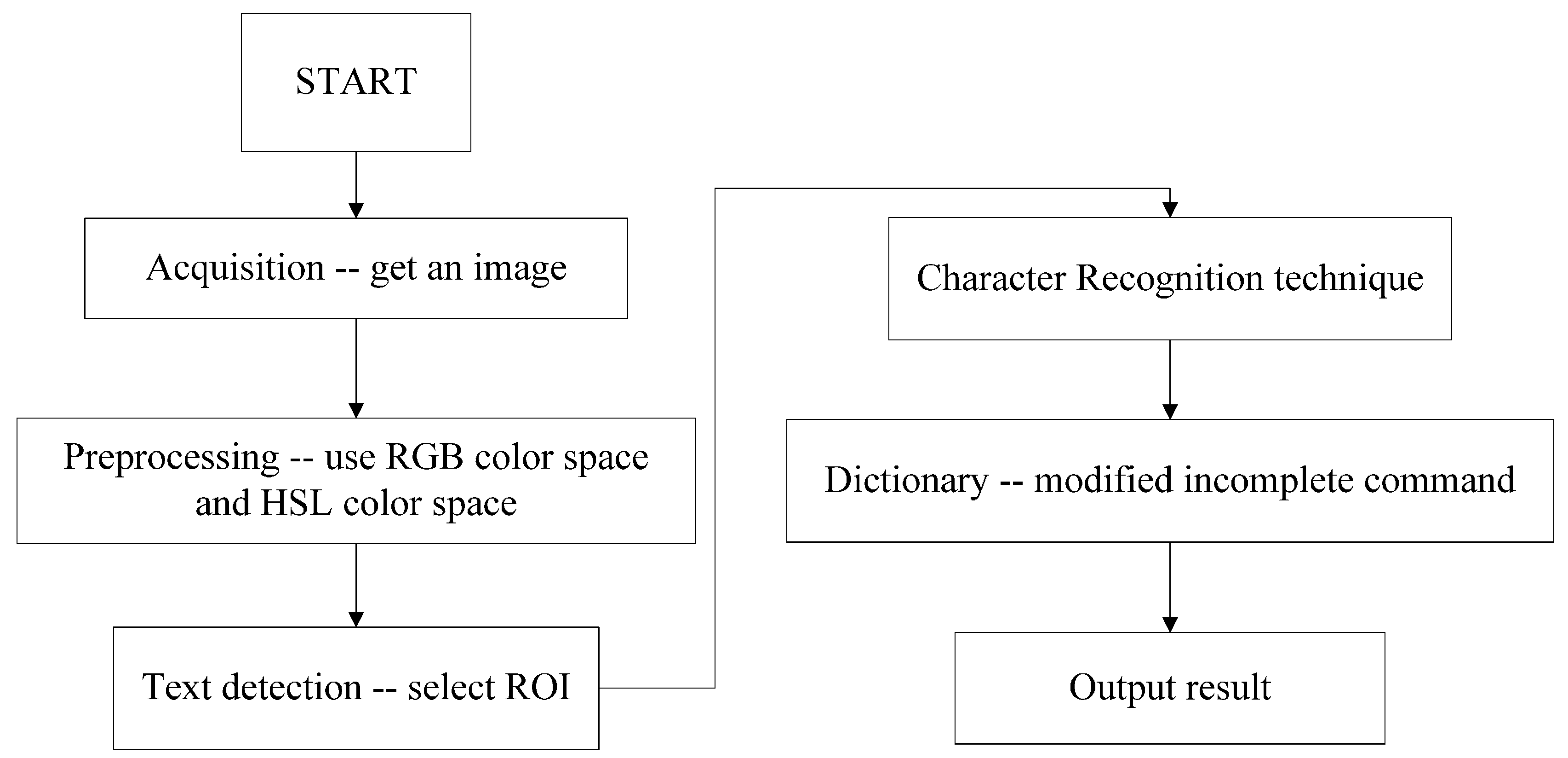
3. Pattern Recognition
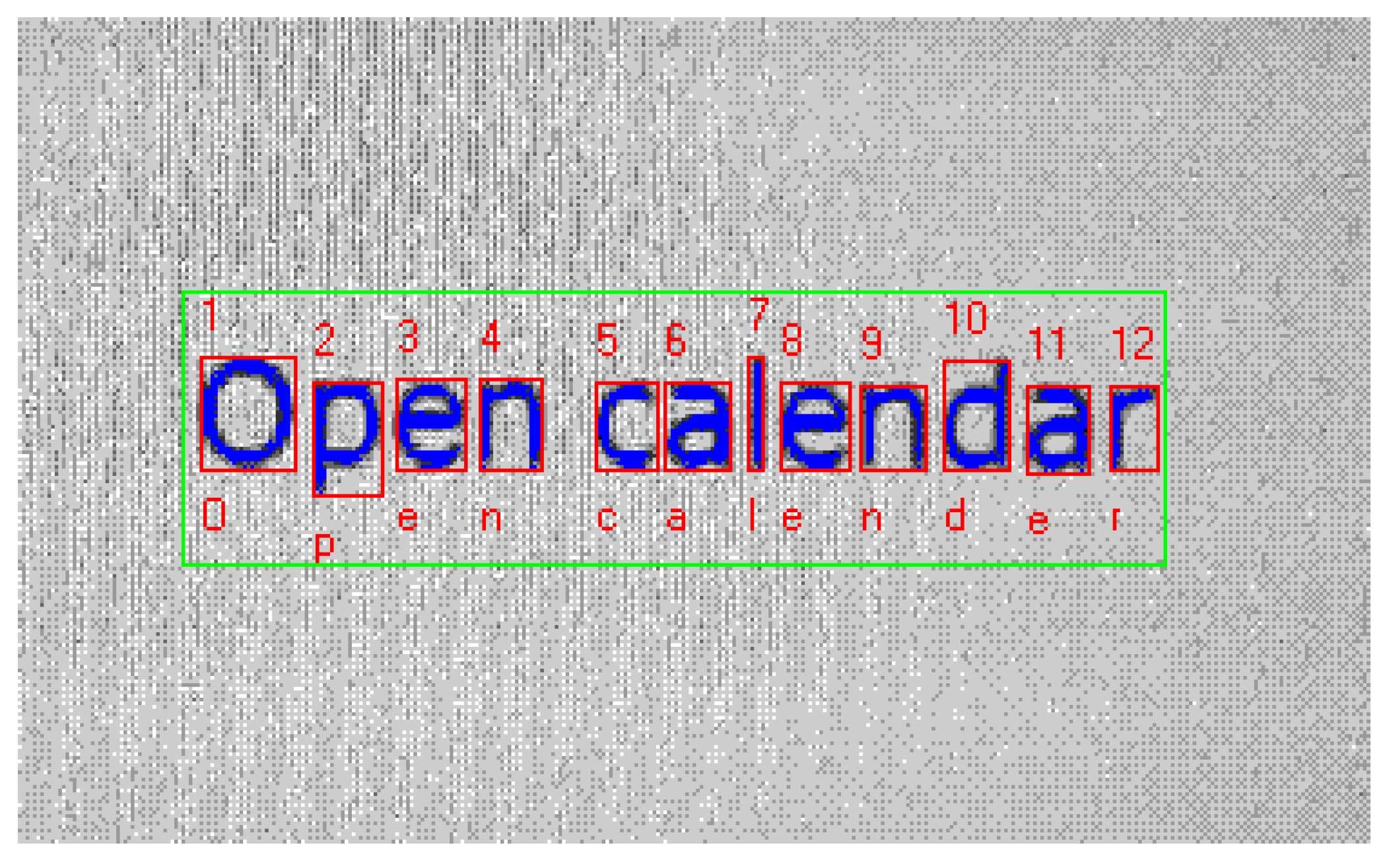
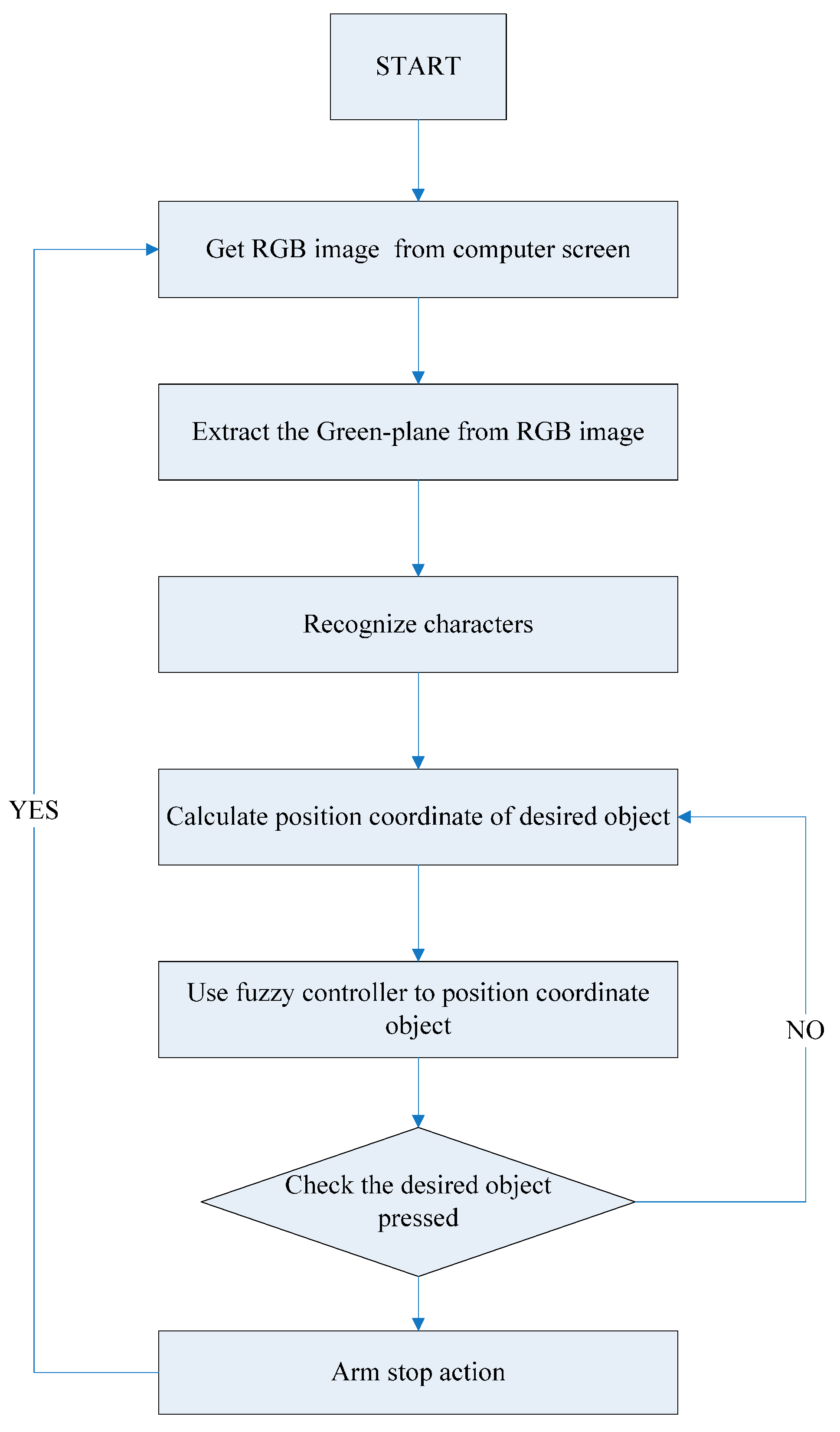
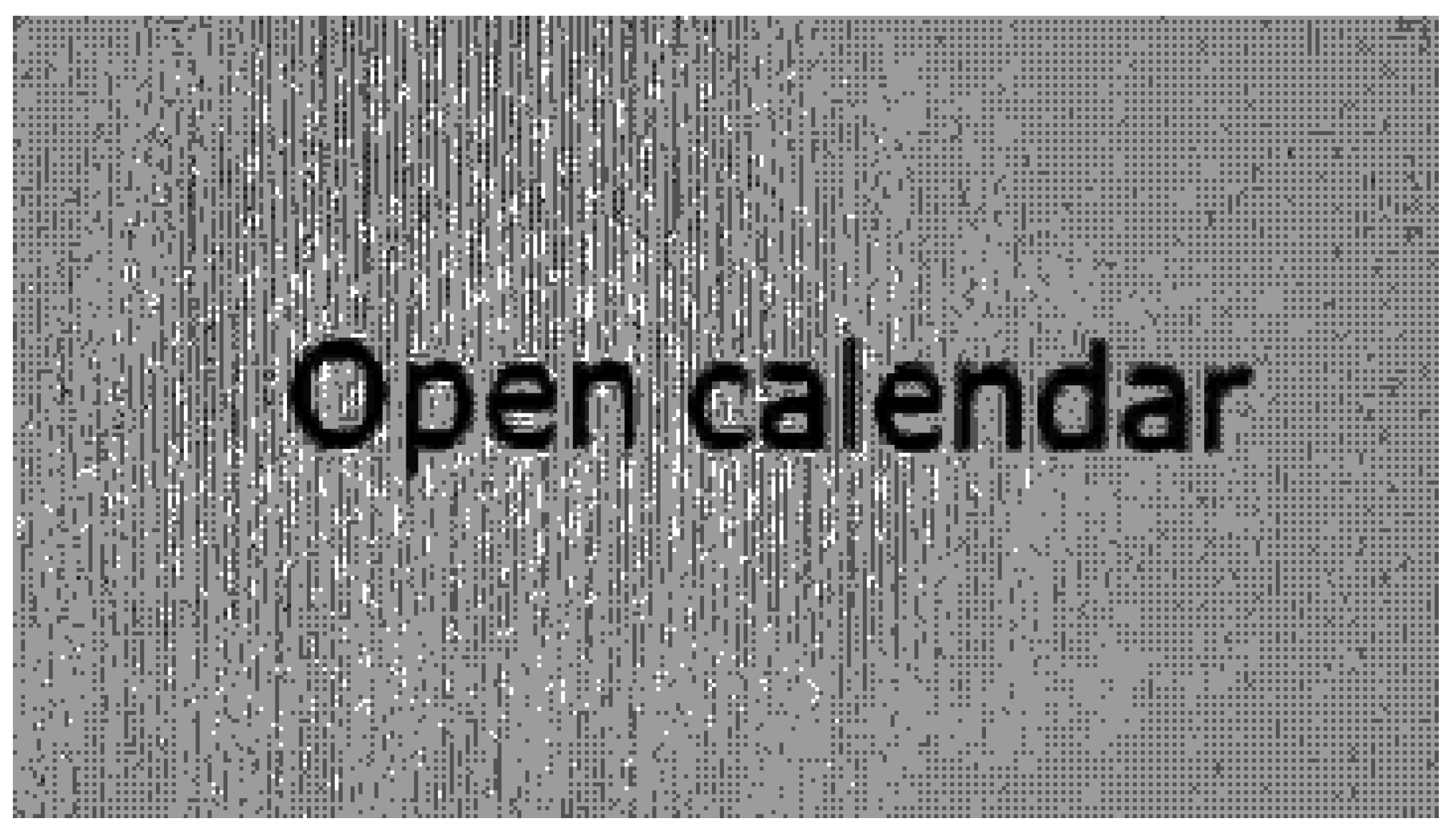
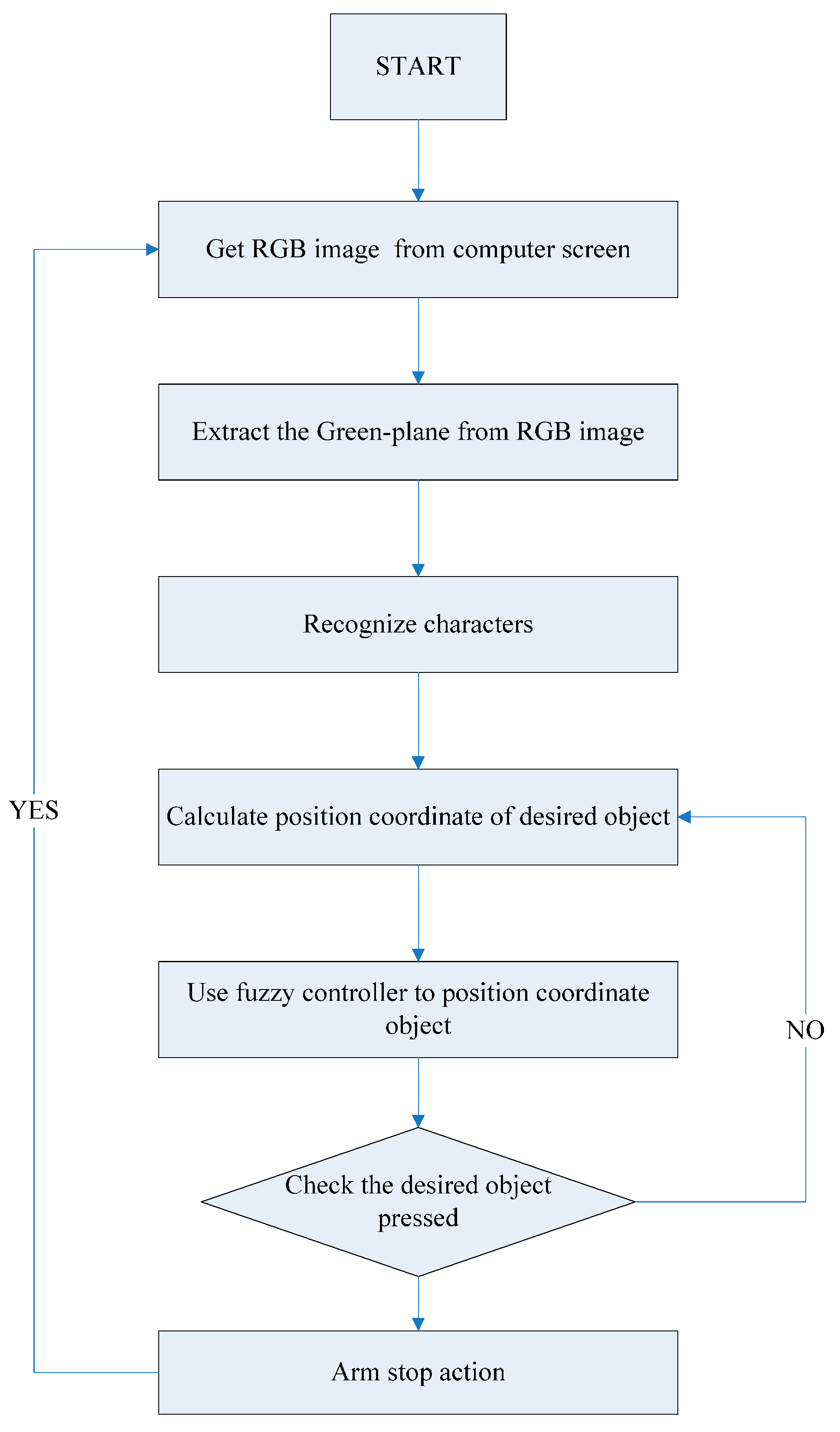
3.1. Image Processing
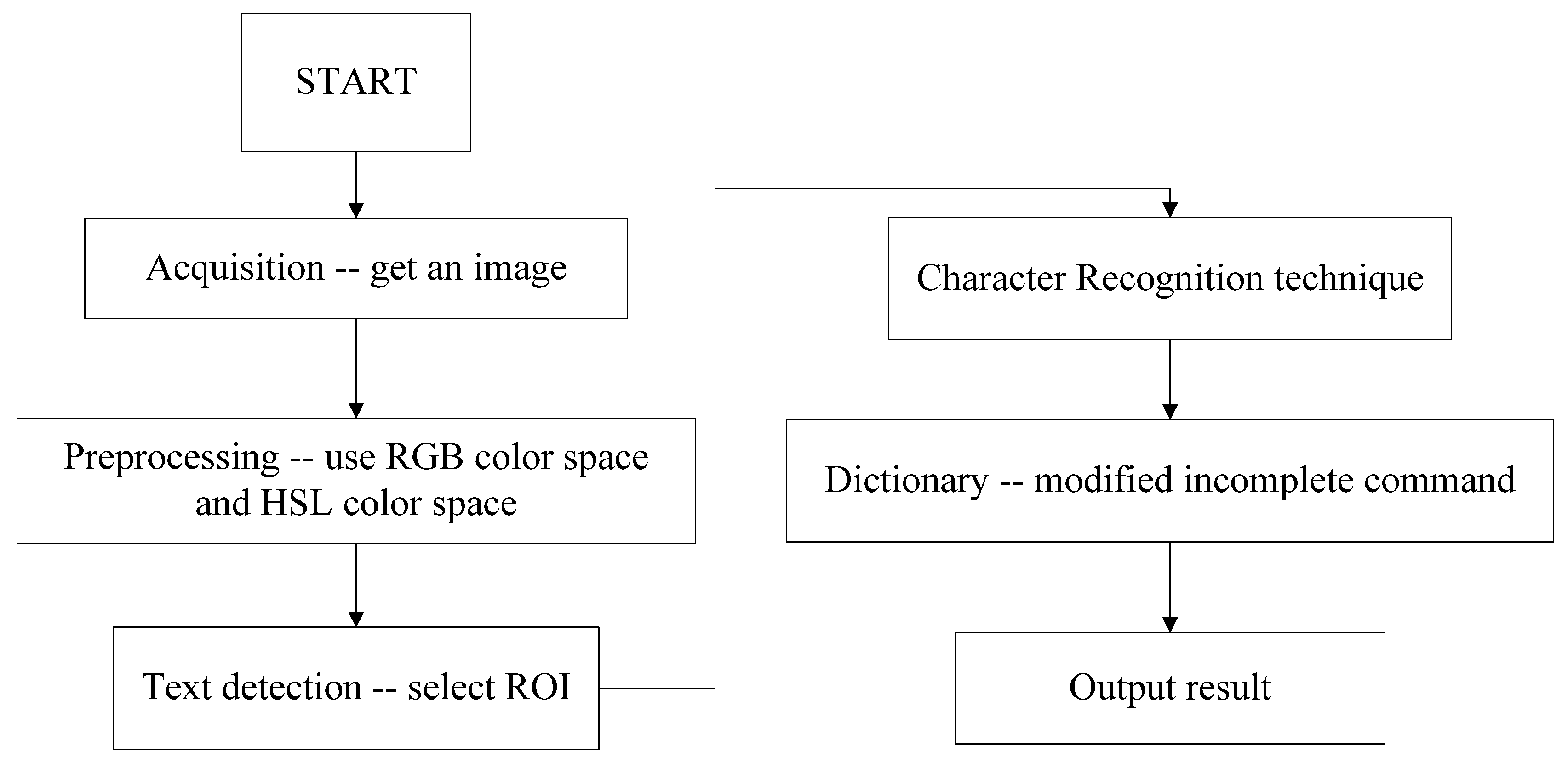
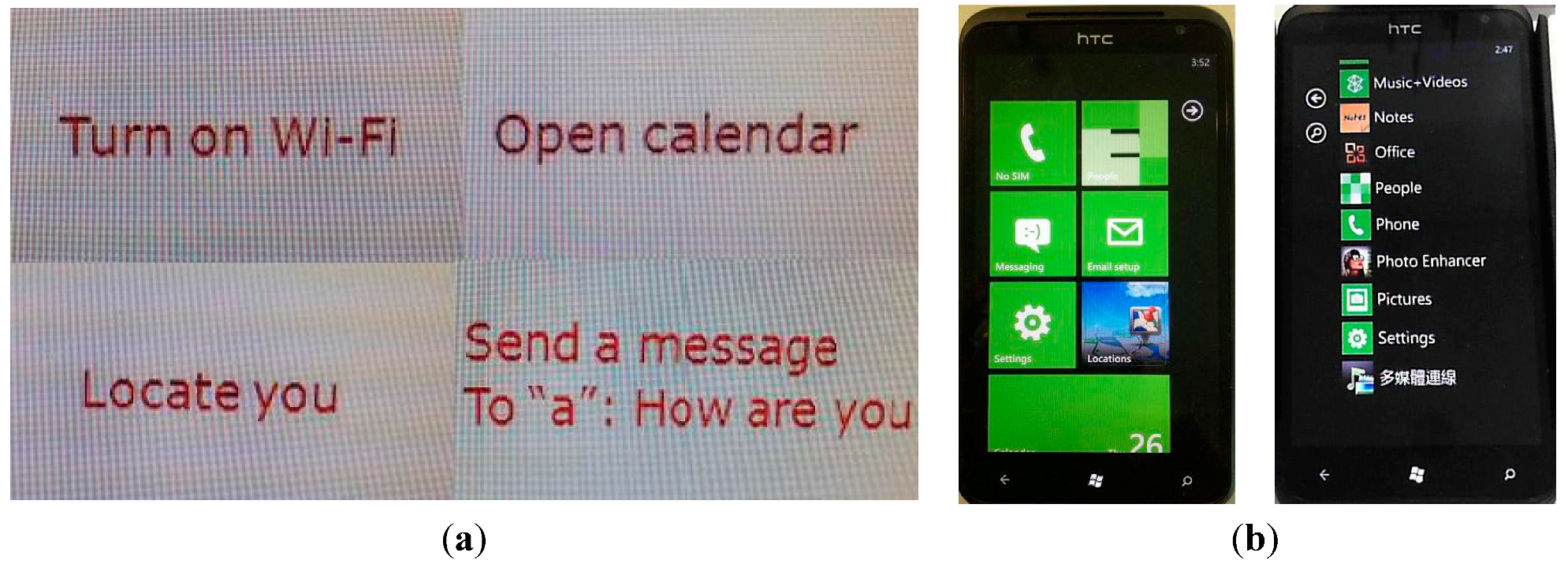
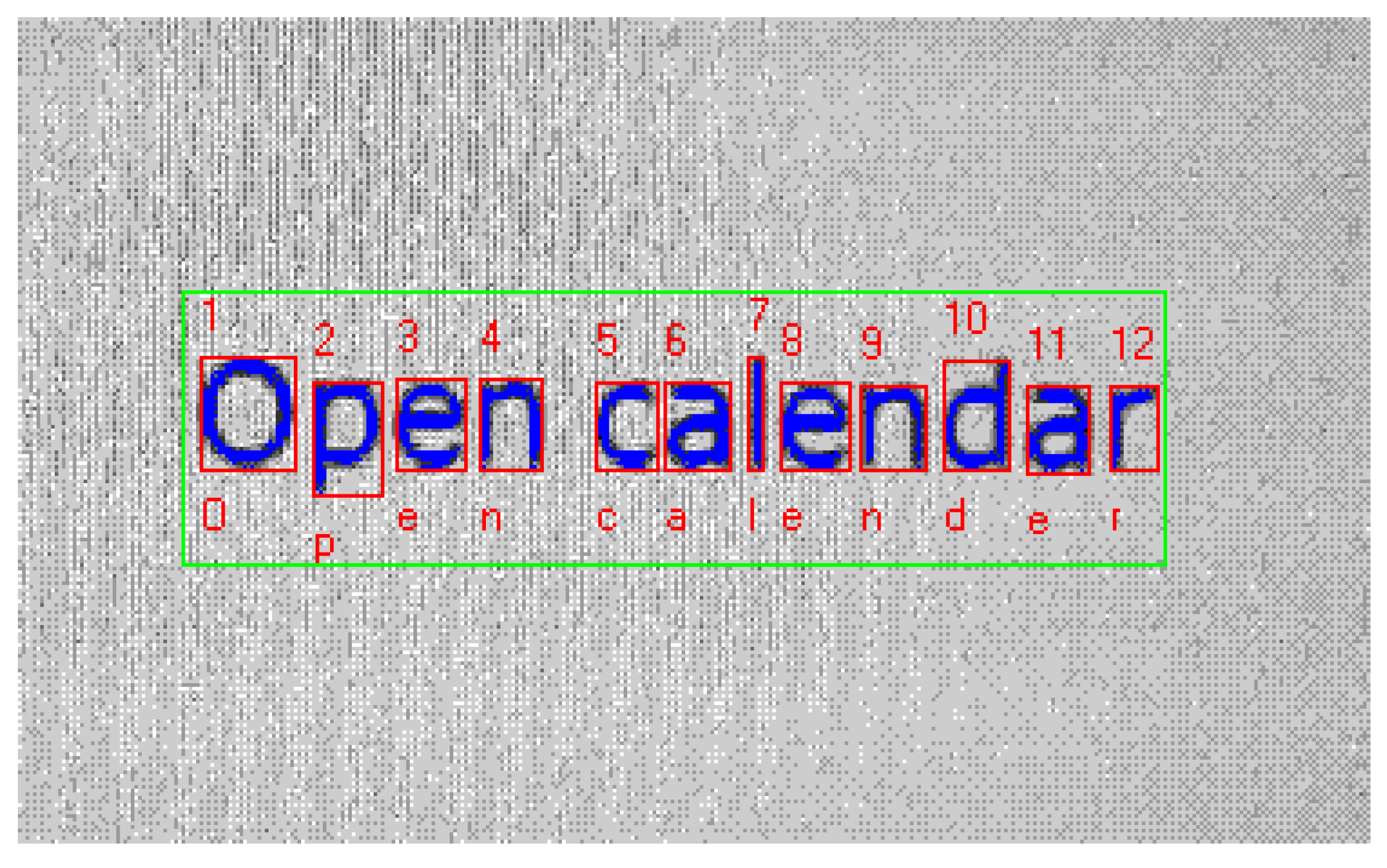
3.2. Character Recognition
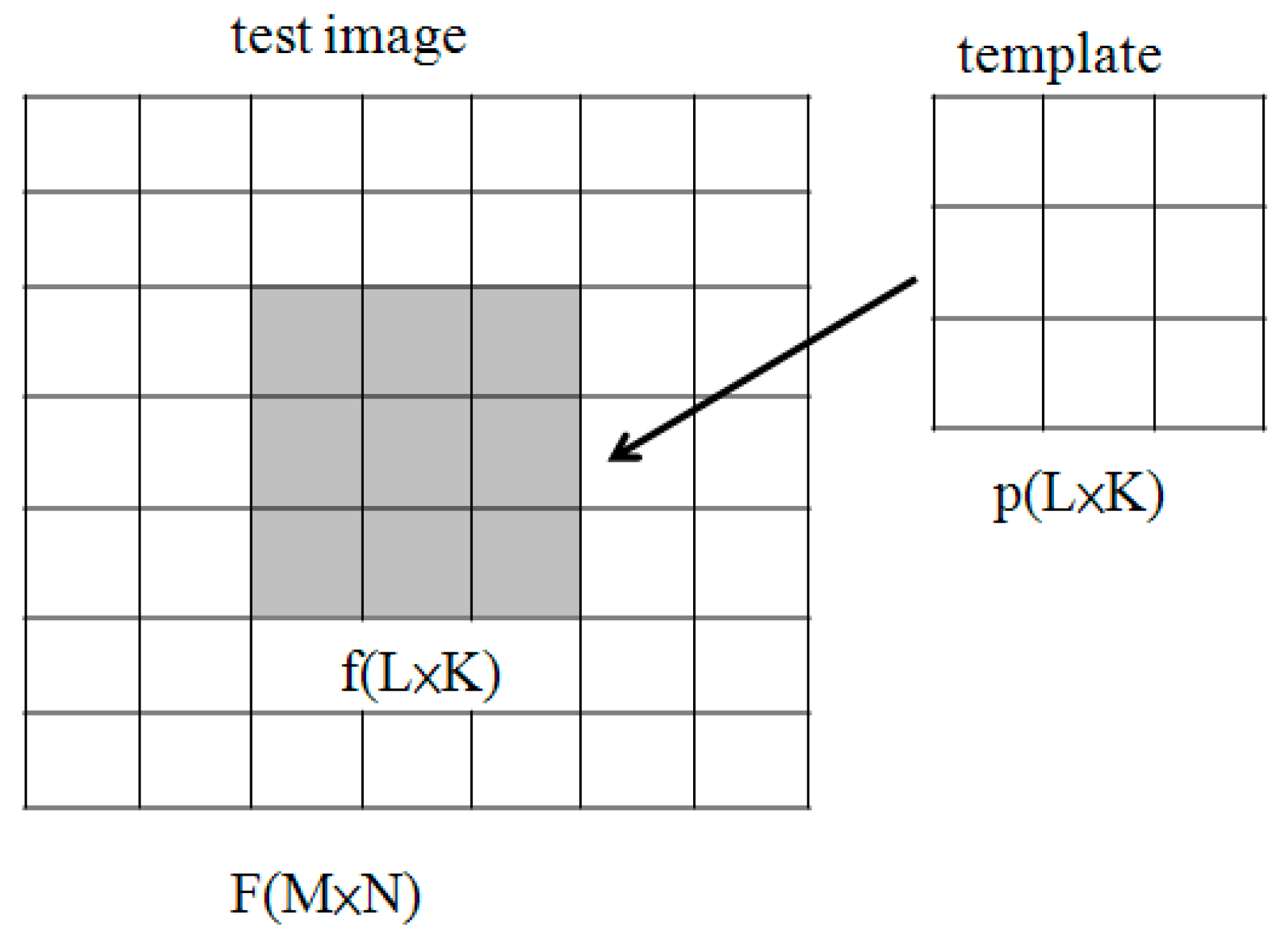
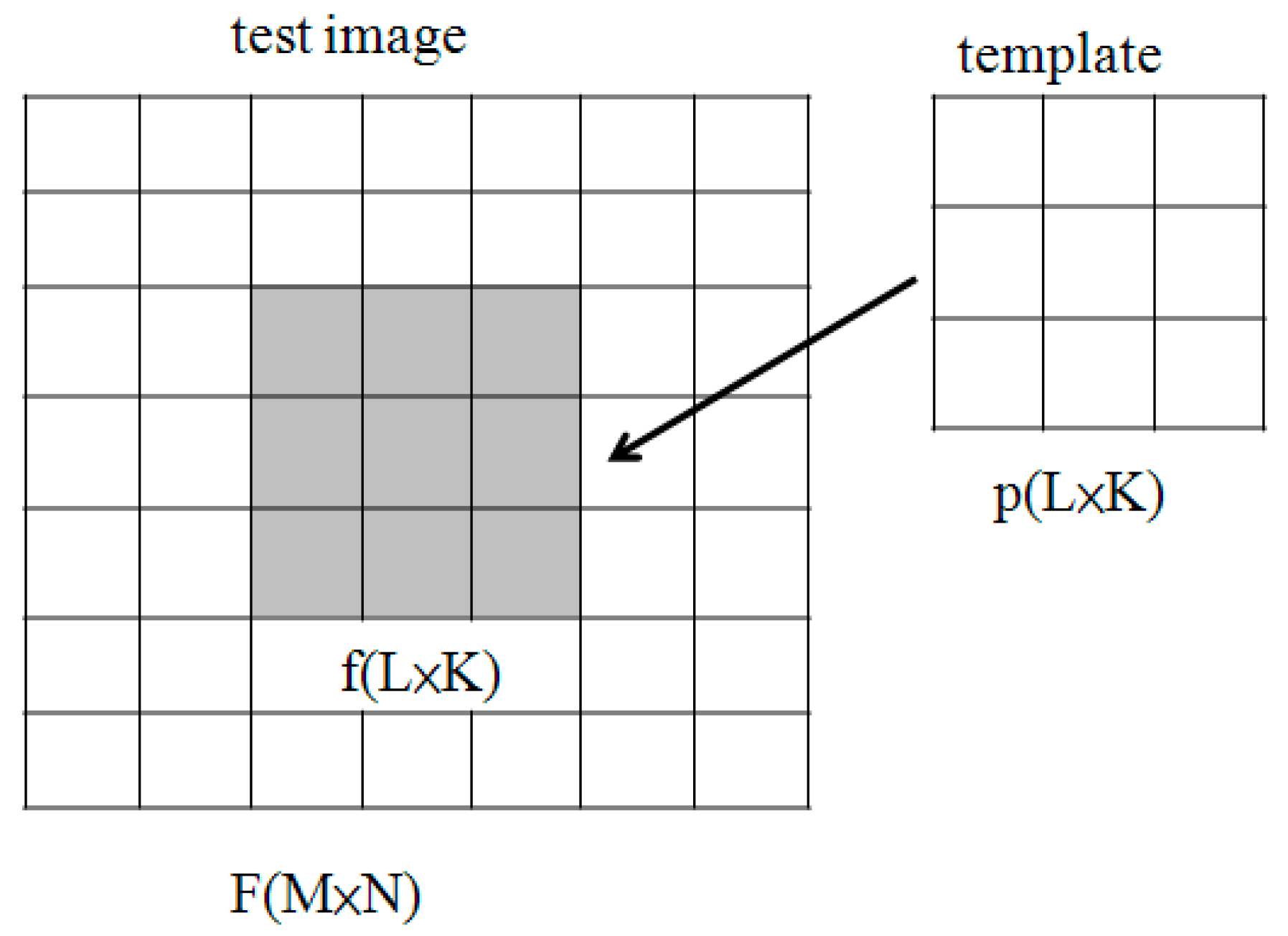
3.2.1. Match Pattern
3.2.2. Vision Builder for Automated Inspection

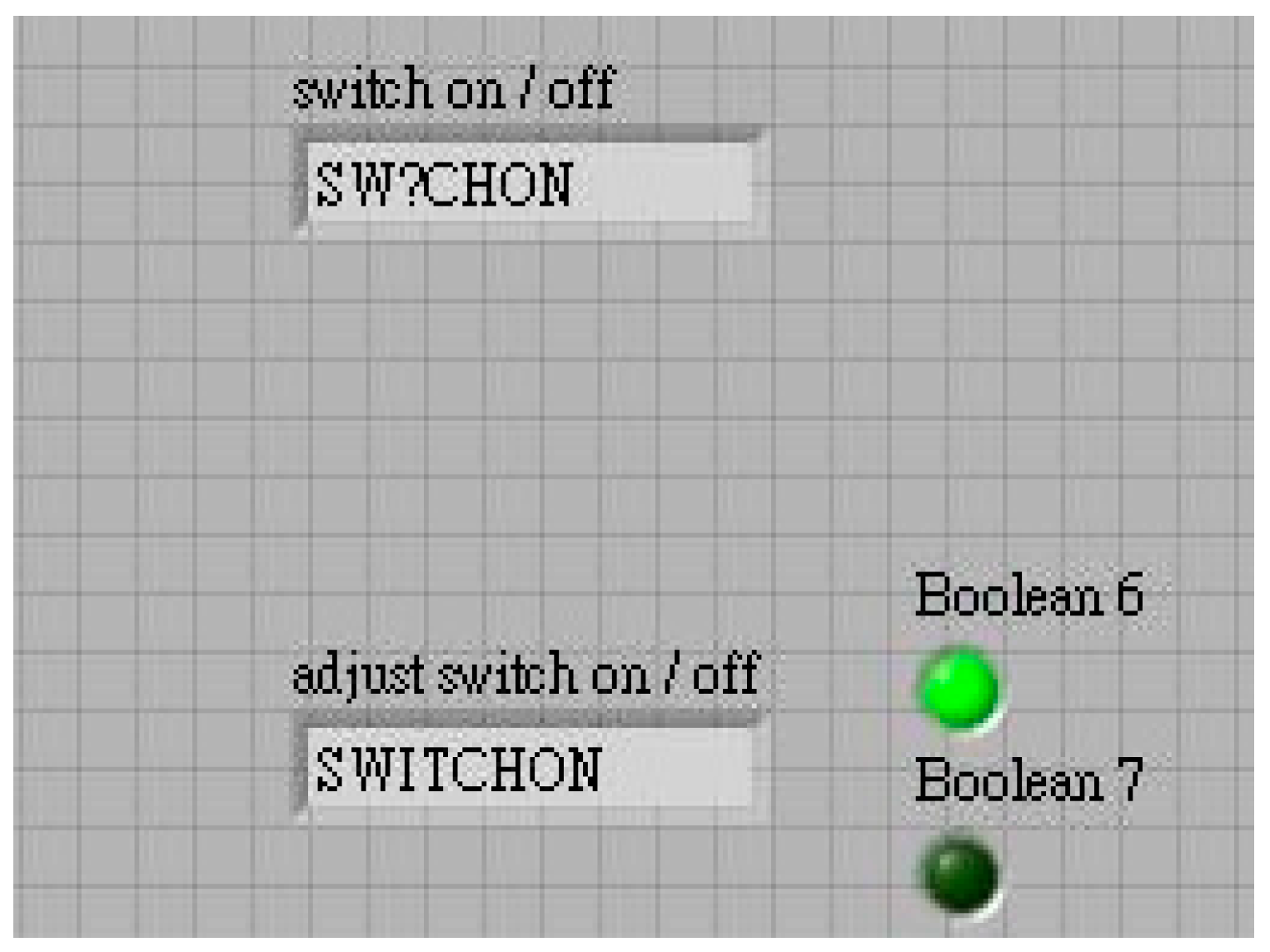
3.2.3. Check the Pressed Button
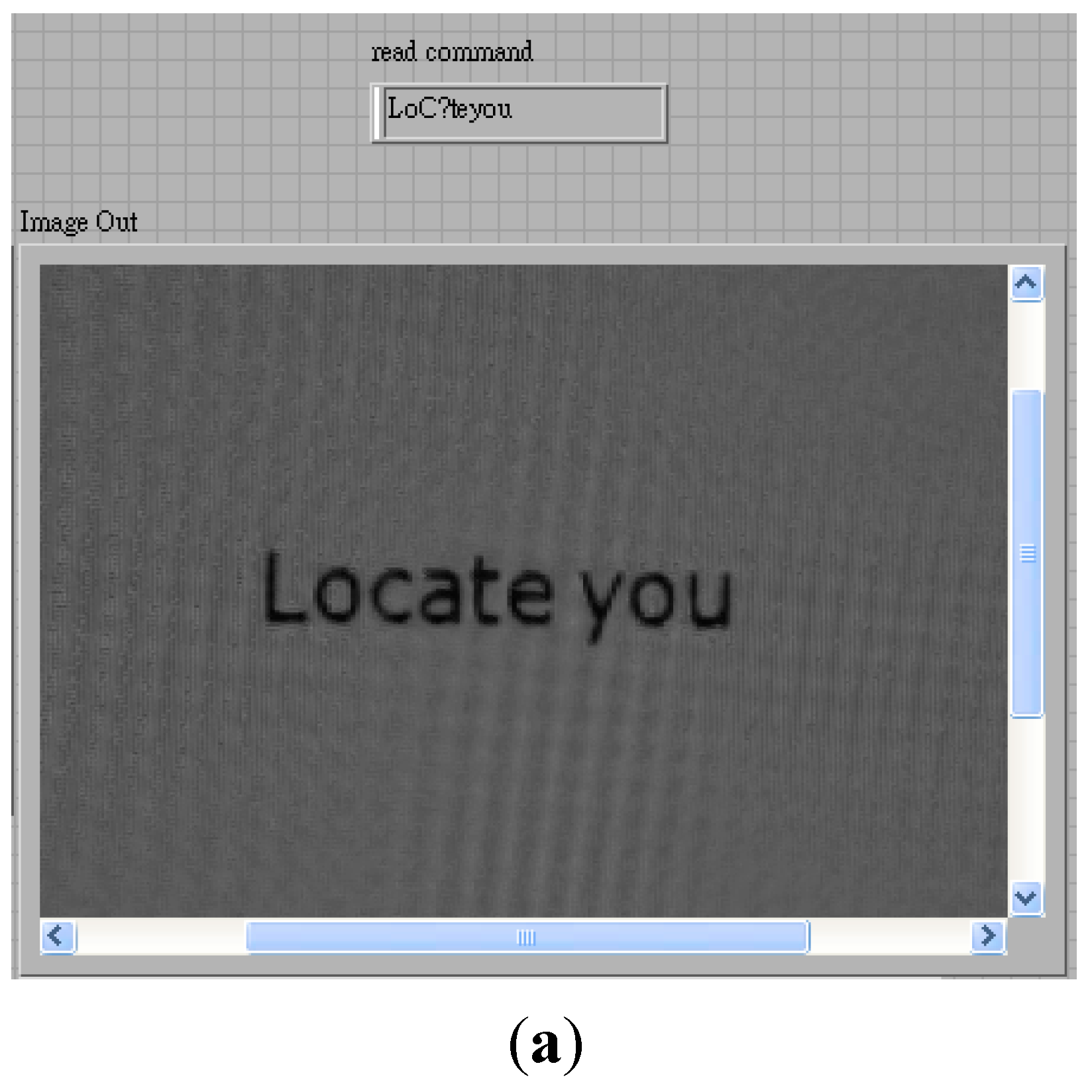
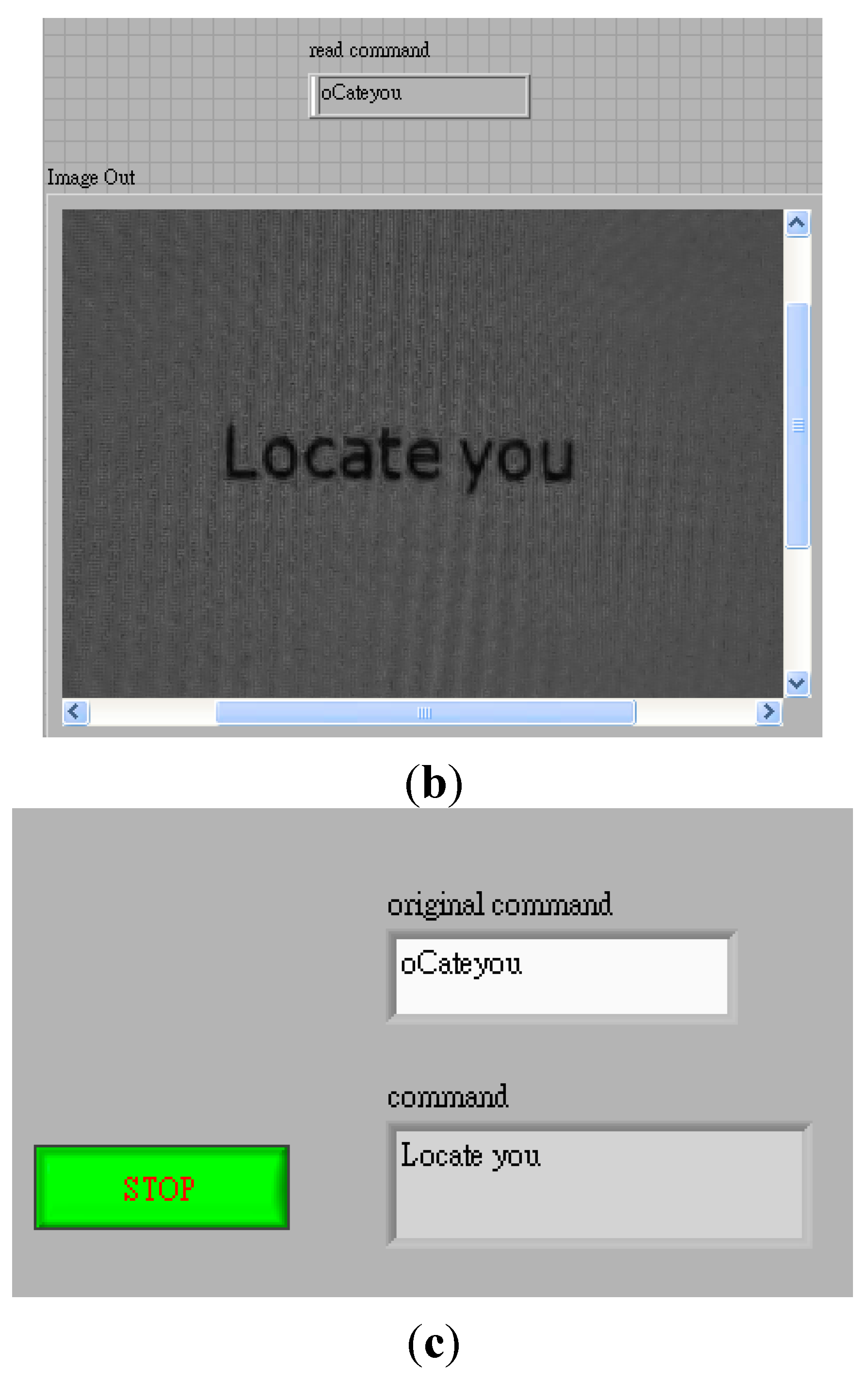
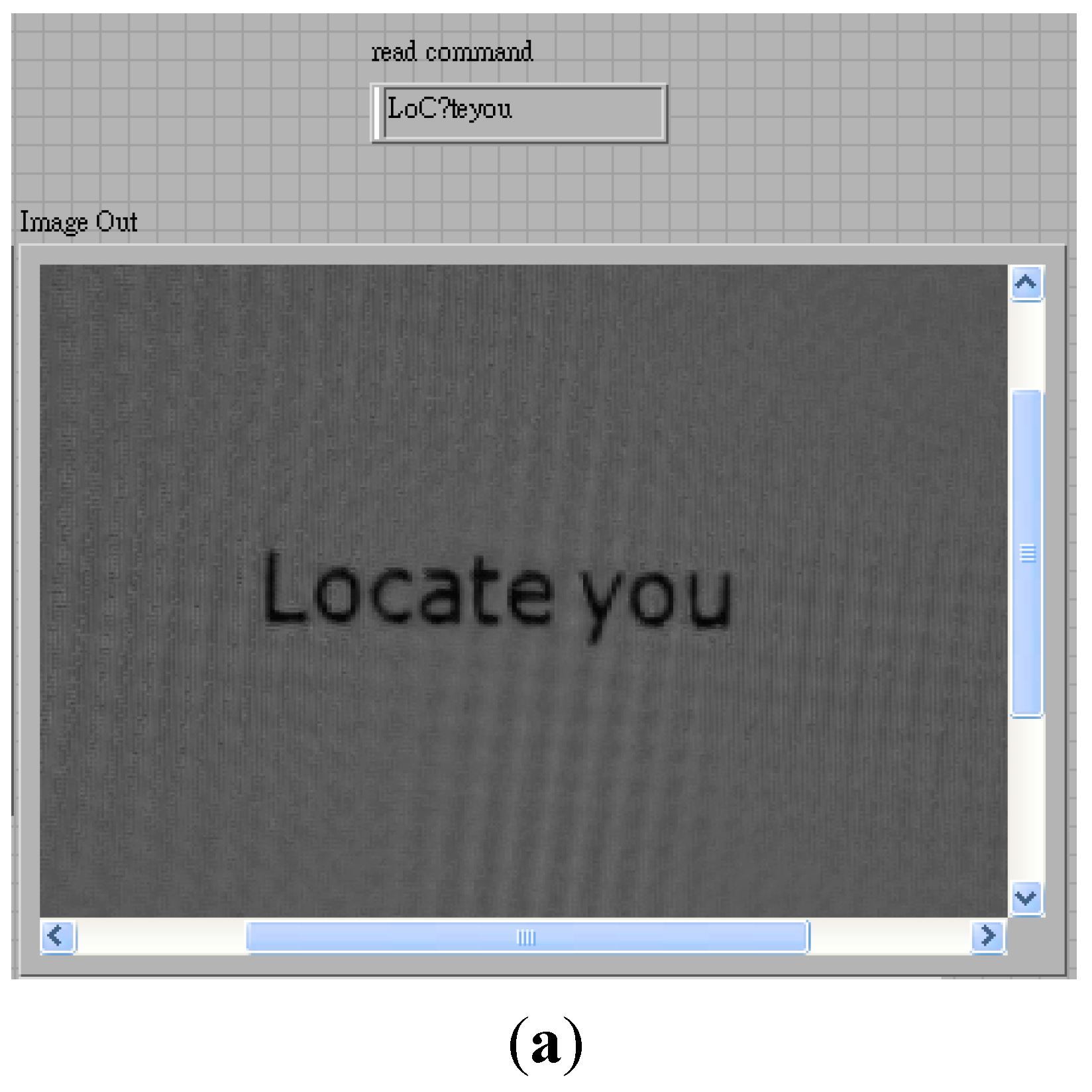
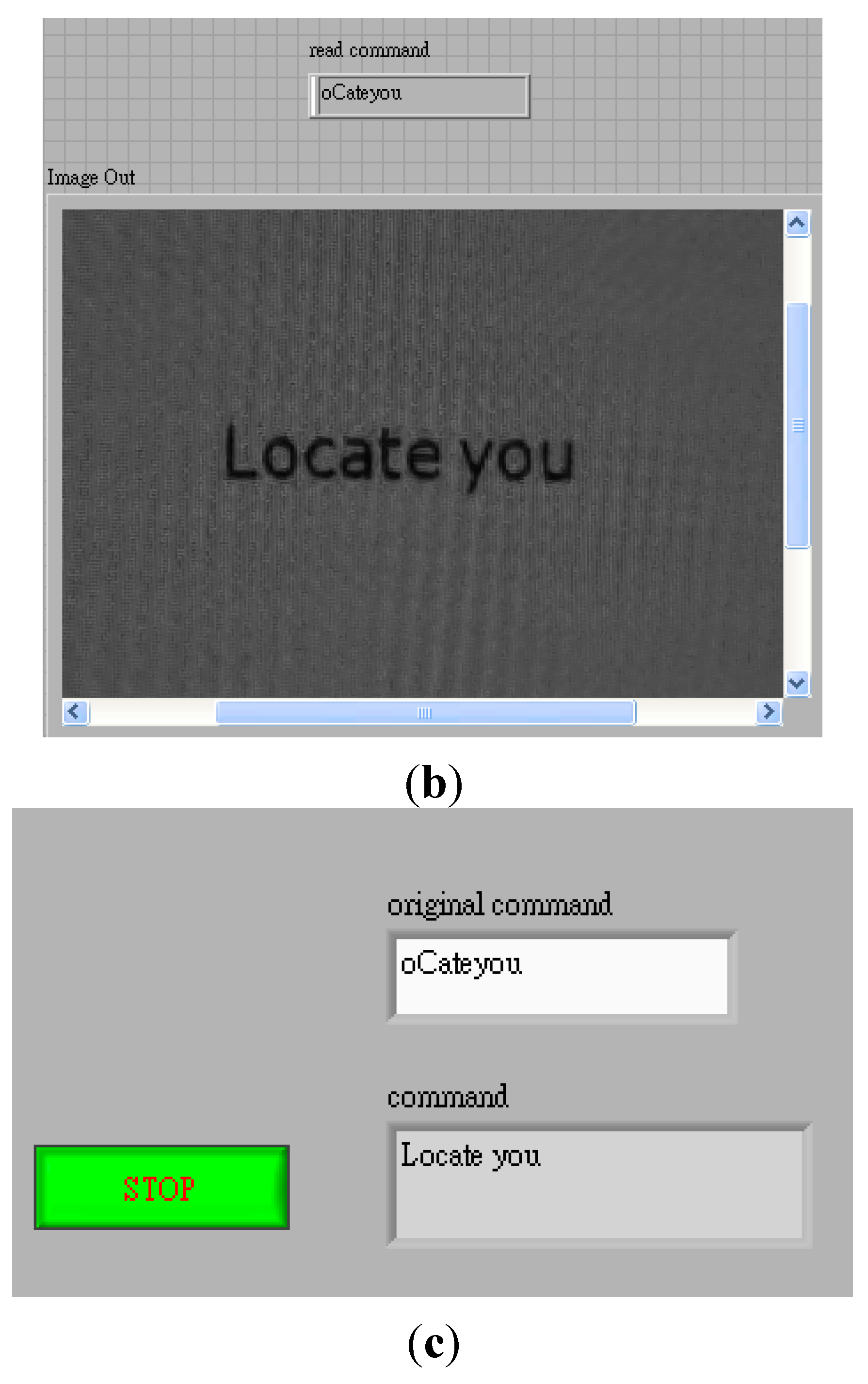
3.2.4. Modified by Dictionary

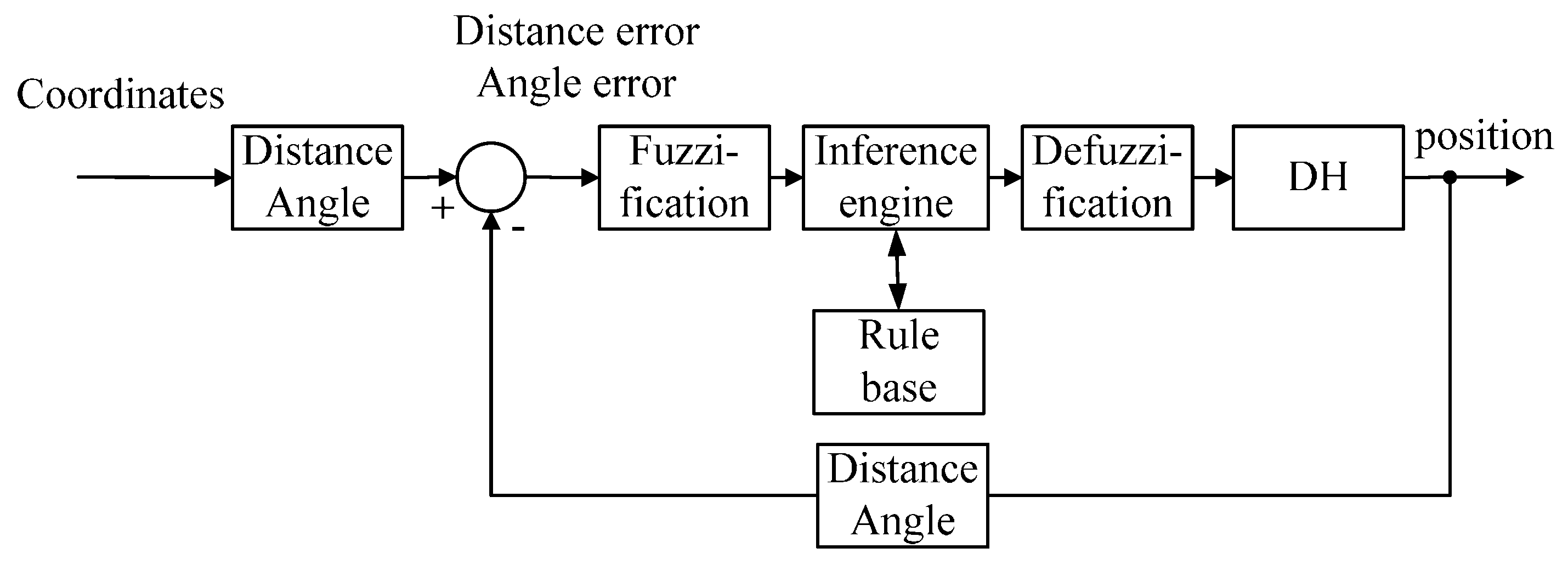
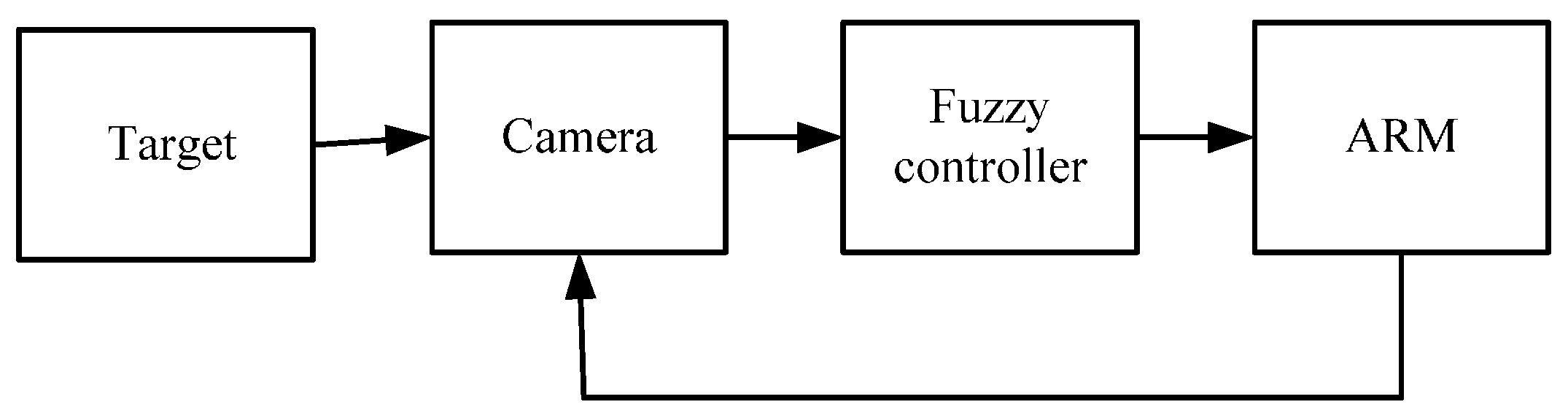
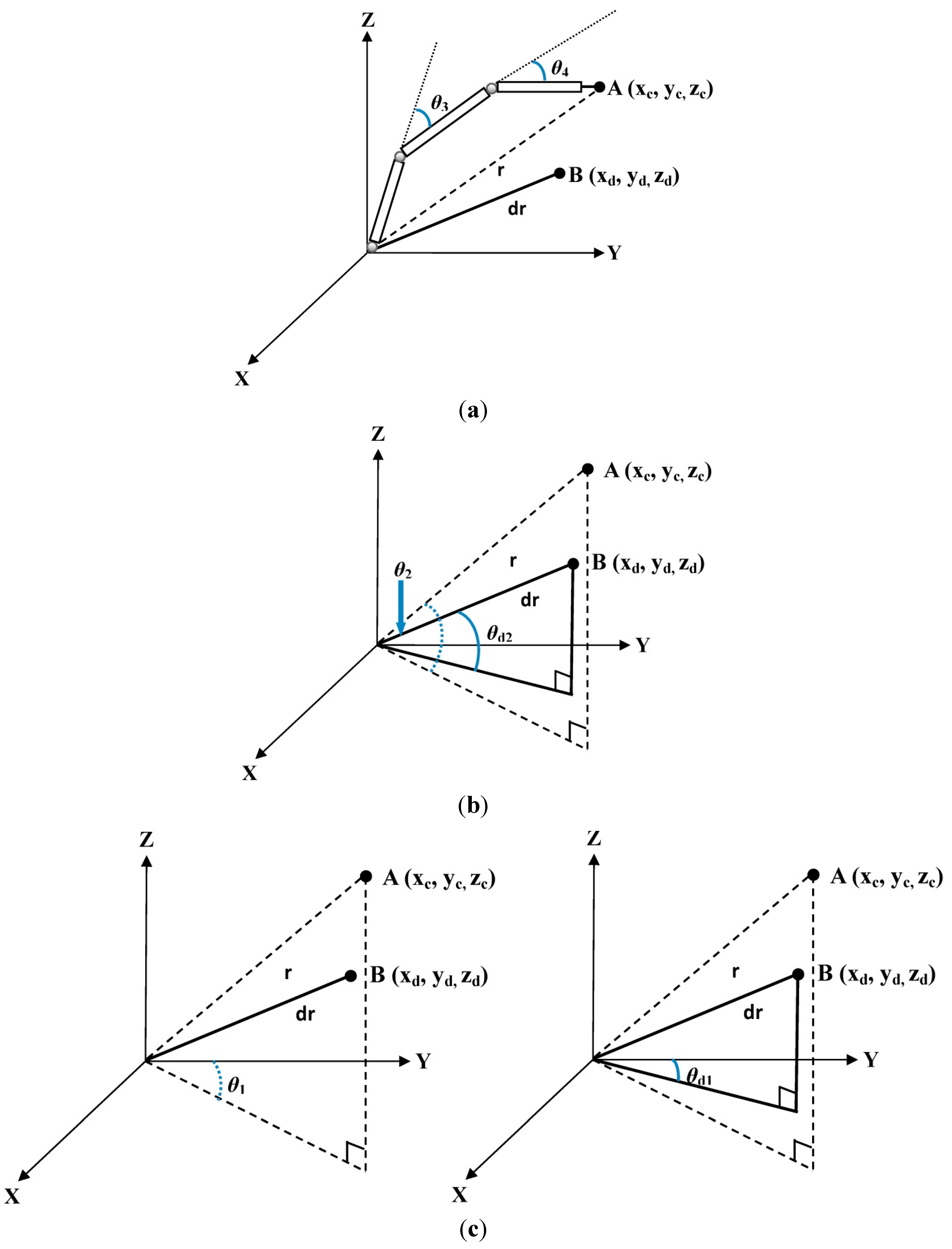
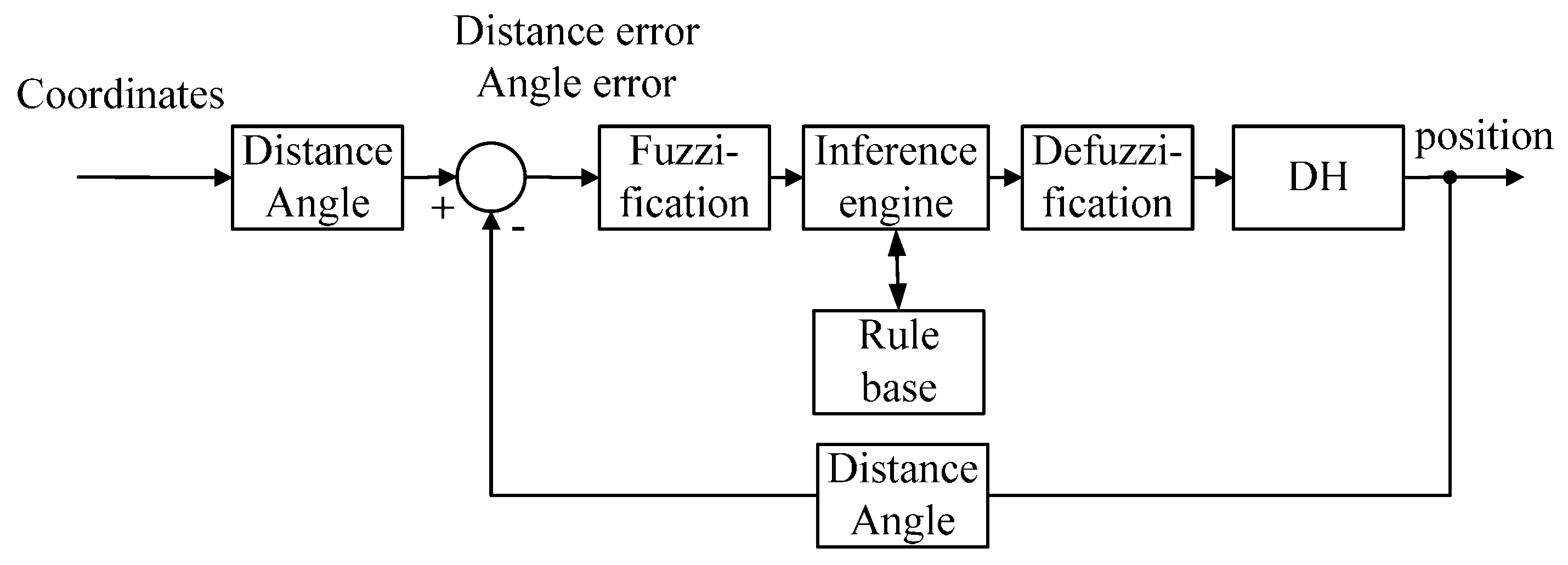
4. Control Scheme

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CoordinatesValues | x (mm) | y (mm) | z (mm) |
|---|---|---|---|
| Values | |||
| Expected Value | 173 | −101 | 25 |
| Actual value with 5 rules | 173.272 | −100.986 | 25.0894 |
| Actual value with 3 rules | 173.076 | −100.872 | 25.1421 |
| Angles | θ1 (deg) | θ2 (deg) | θ3 (deg) | θ4 (deg) |
|---|---|---|---|---|
| Values | ||||
| Error value | 0° | 0.264° | 0.44° | 0.264° |
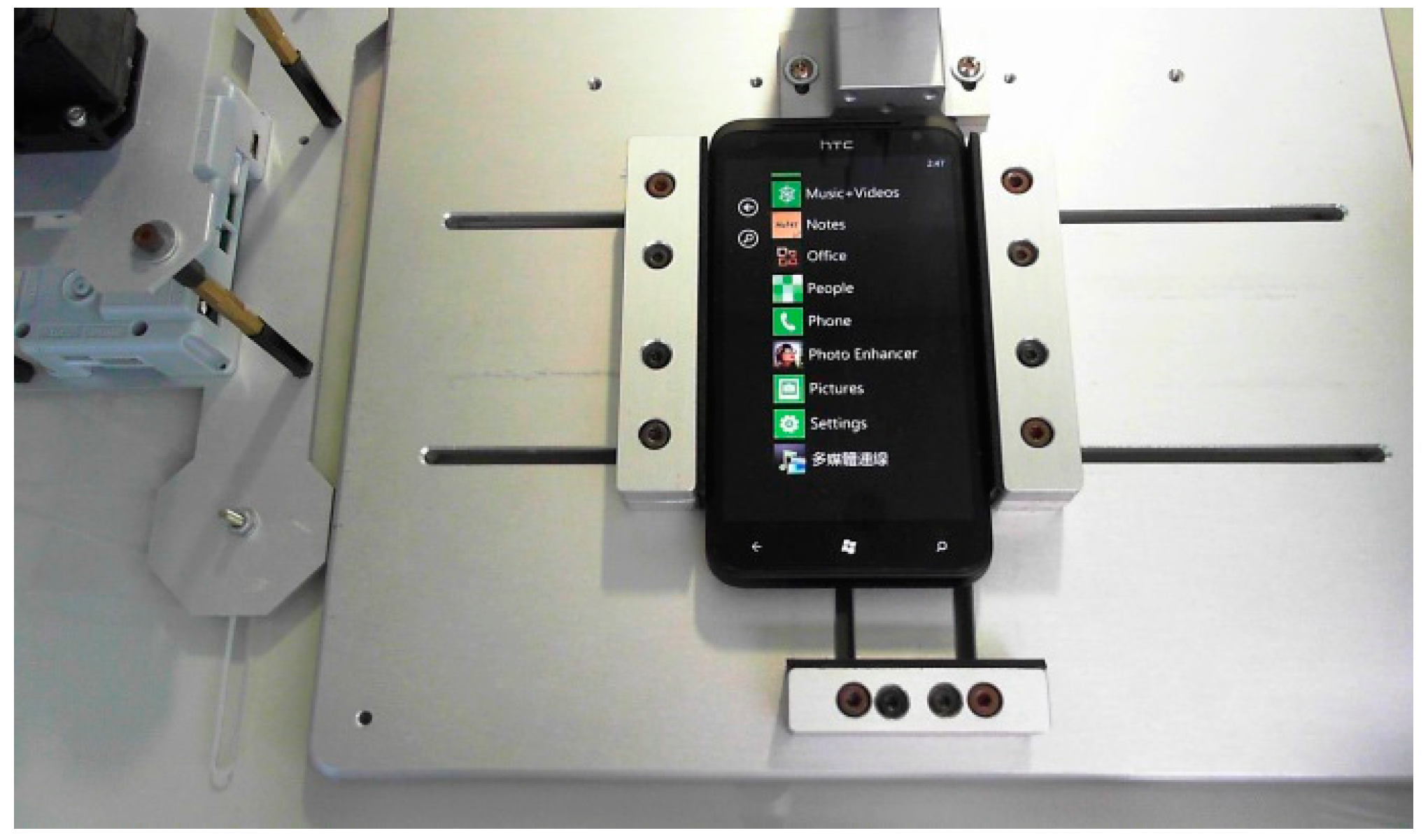
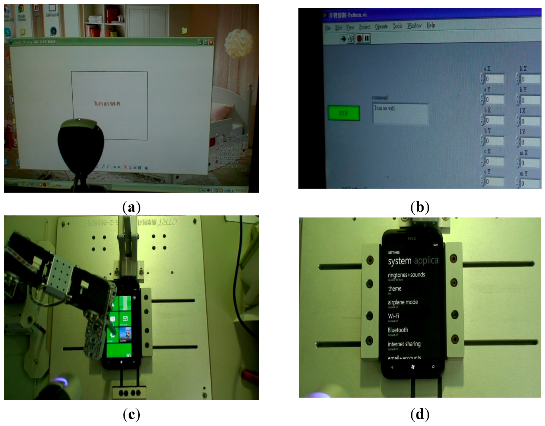
5. Experimental Results
| Word | Recognized % | Problems | Dictionary % |
|---|---|---|---|
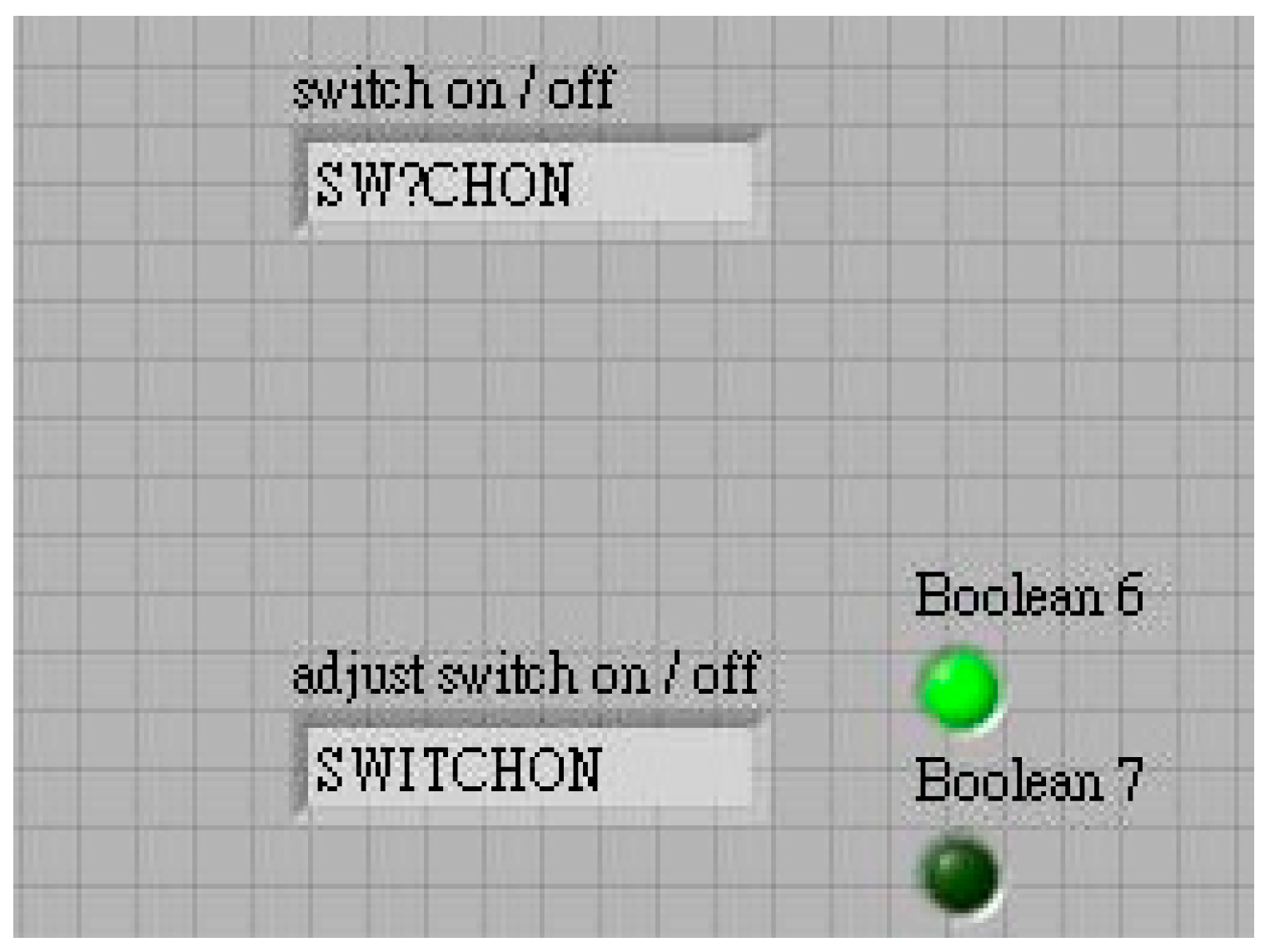
| SWITCH | 93.6 | i recognized as J or 1, or not recognized | 97.6 |
| ON | 100 | - | 100 |
| OFF | 100 | - | 100 |
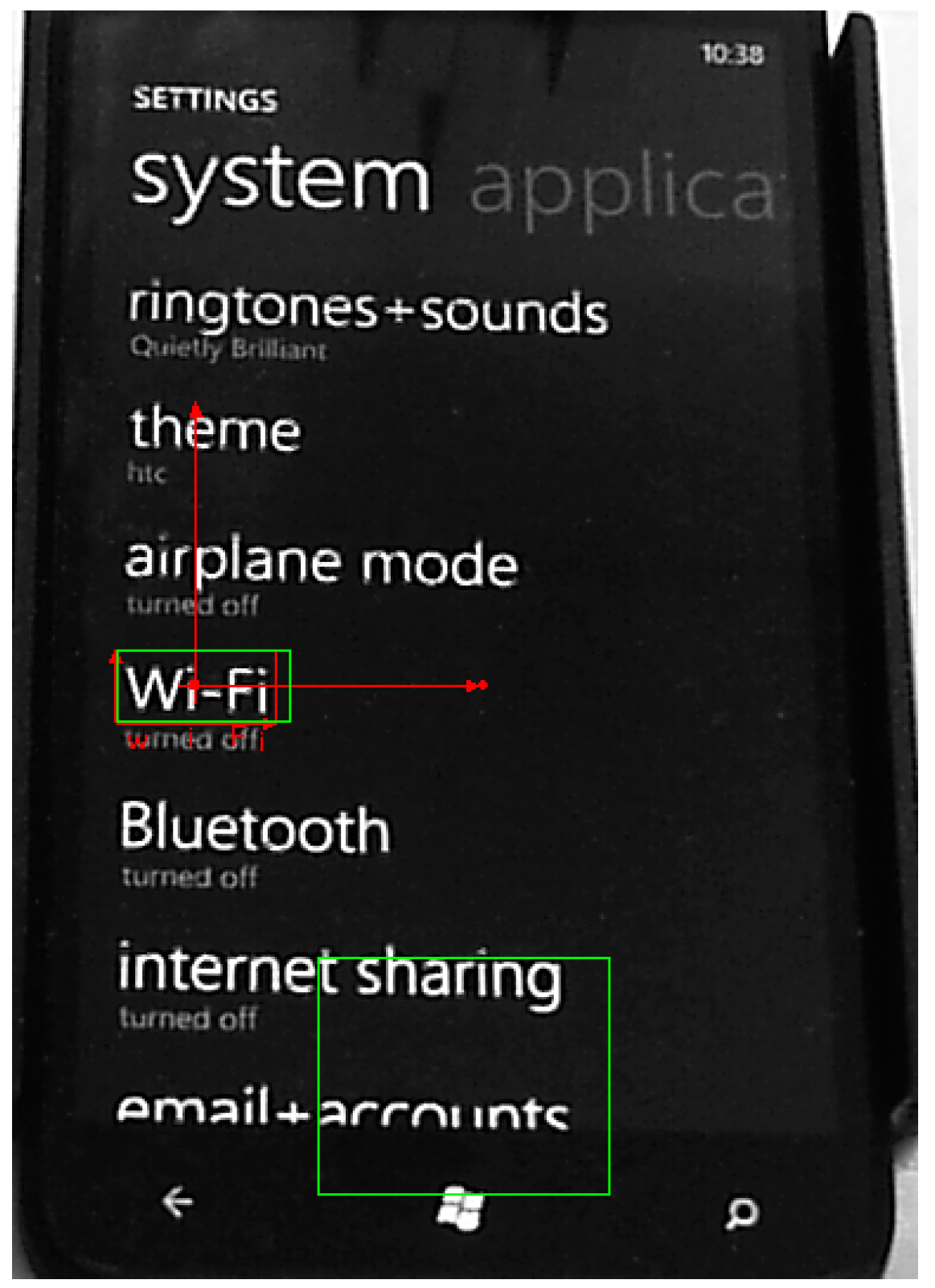
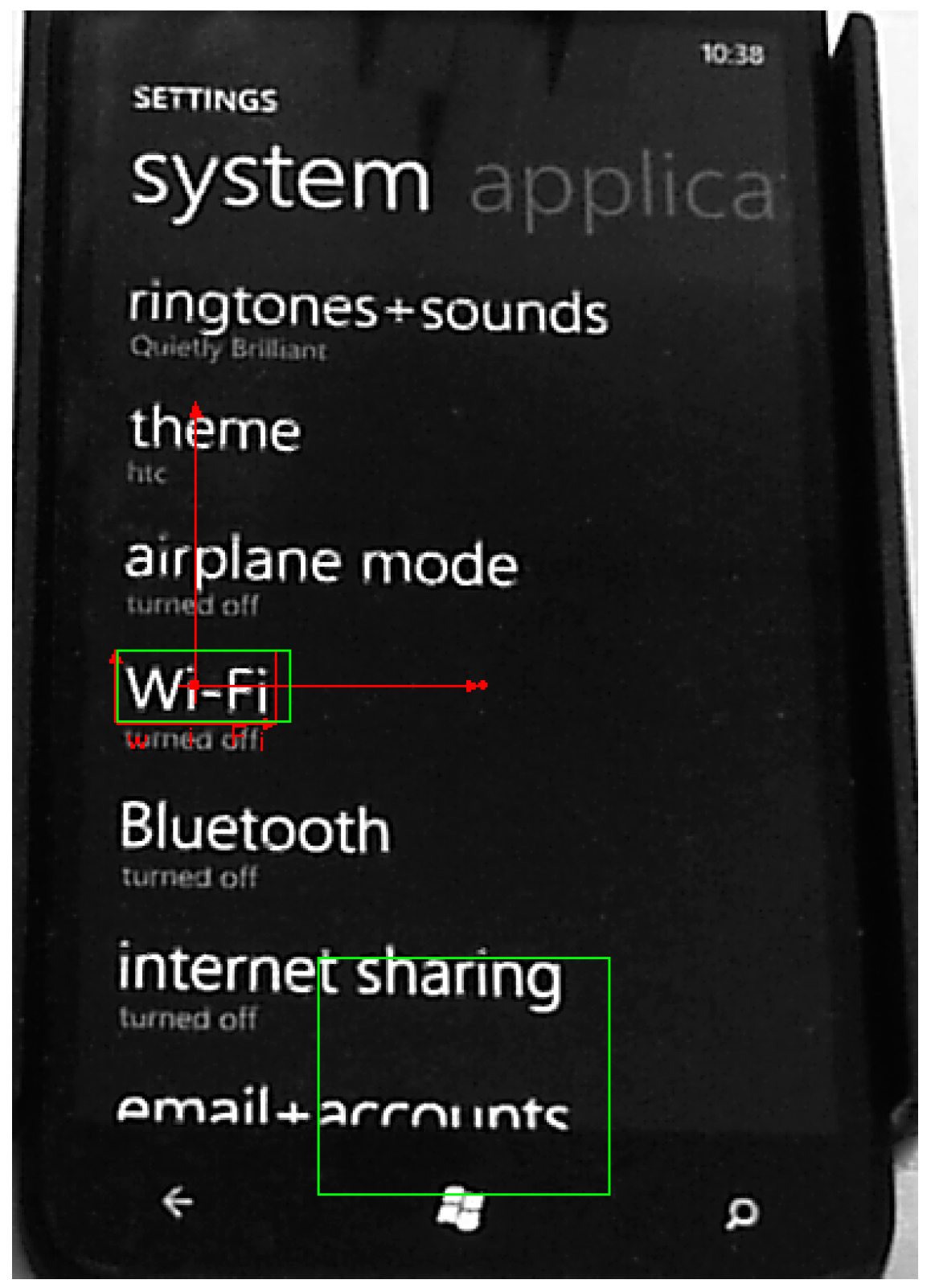
| WiFi | 78.5 | i recognized as l or 1, or not recognized | 100 |
| 97.9 | l recognized as i; o recognized as 0 or d, or not recognized | 99.3 | |
| Maps | 100 | - | 100 |
| Open | 72.4 | o recognized as d; e recognized as o; n recognized as h | 100 |
| 90 | i recognized as l or 1; l recognized as i or 1 | 95 | |
| Hotspot | 99.2 | p not recognized | 99.2 |
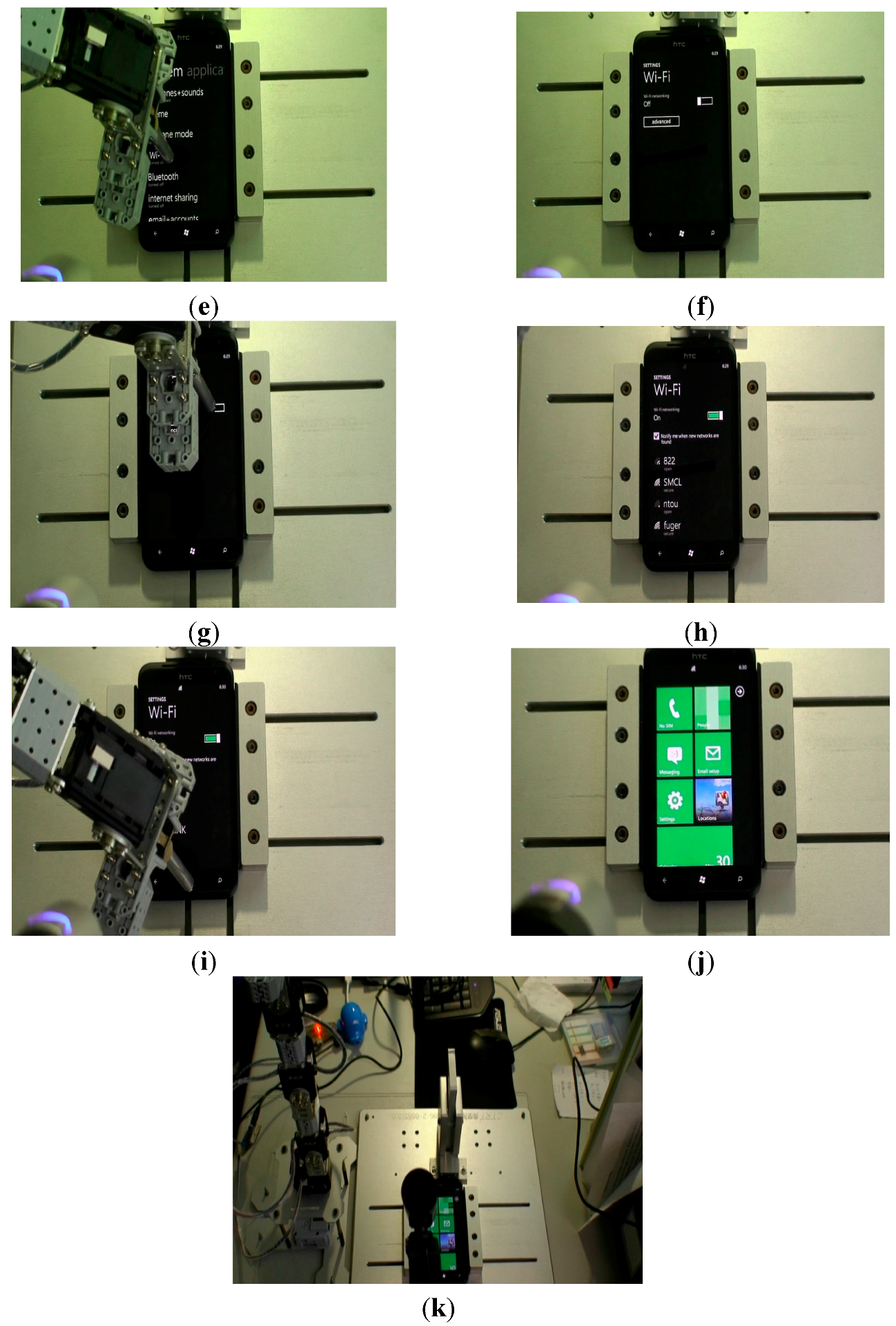
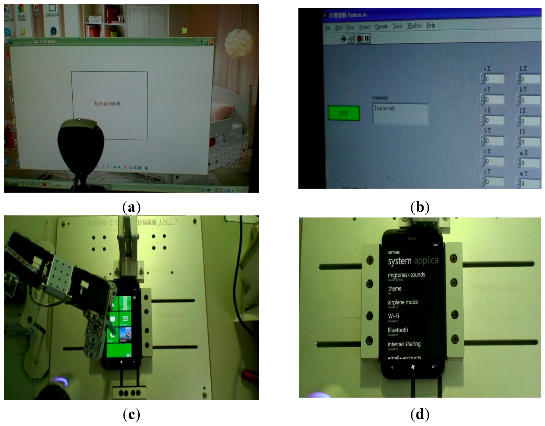
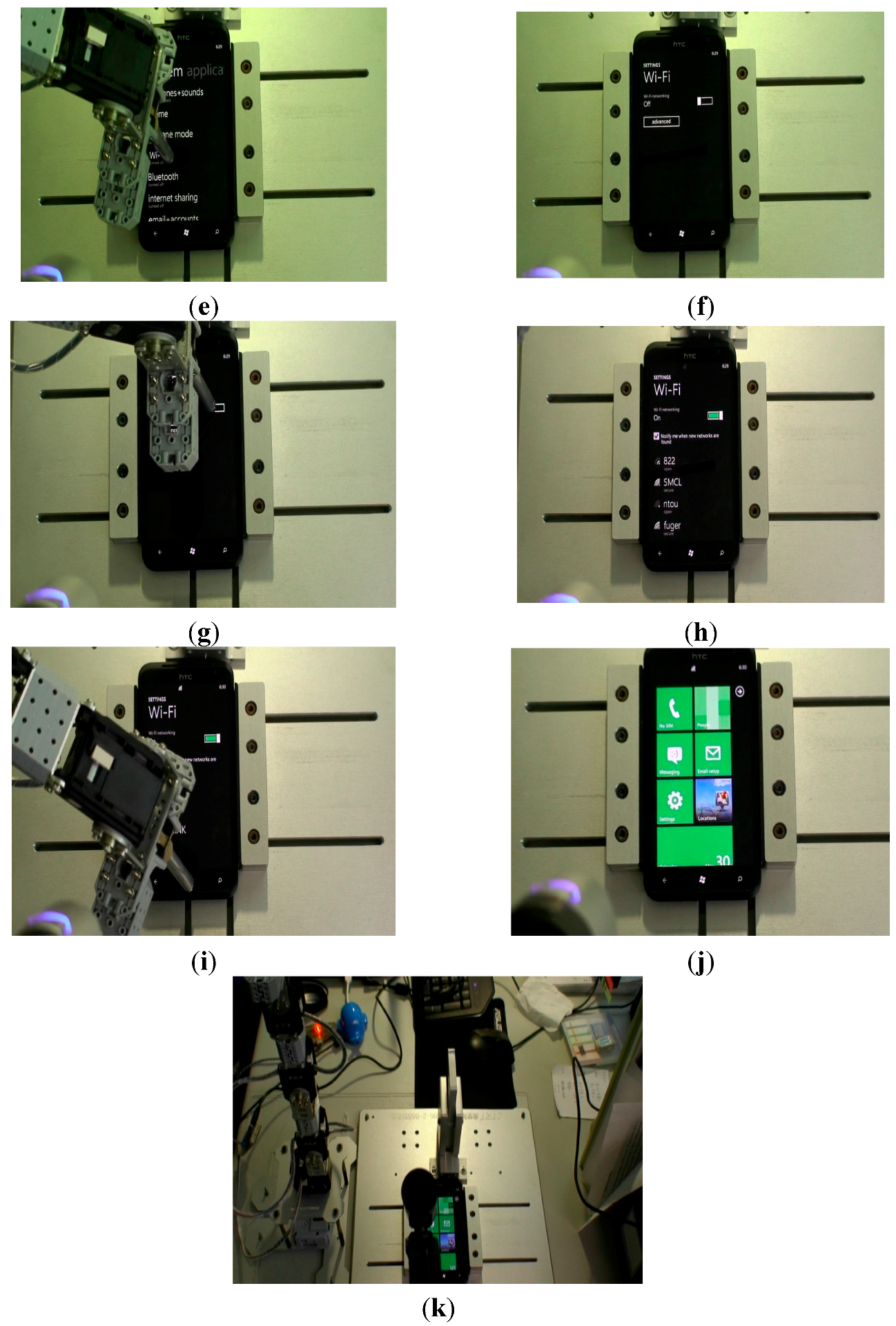
5.1. Turn on WiFi
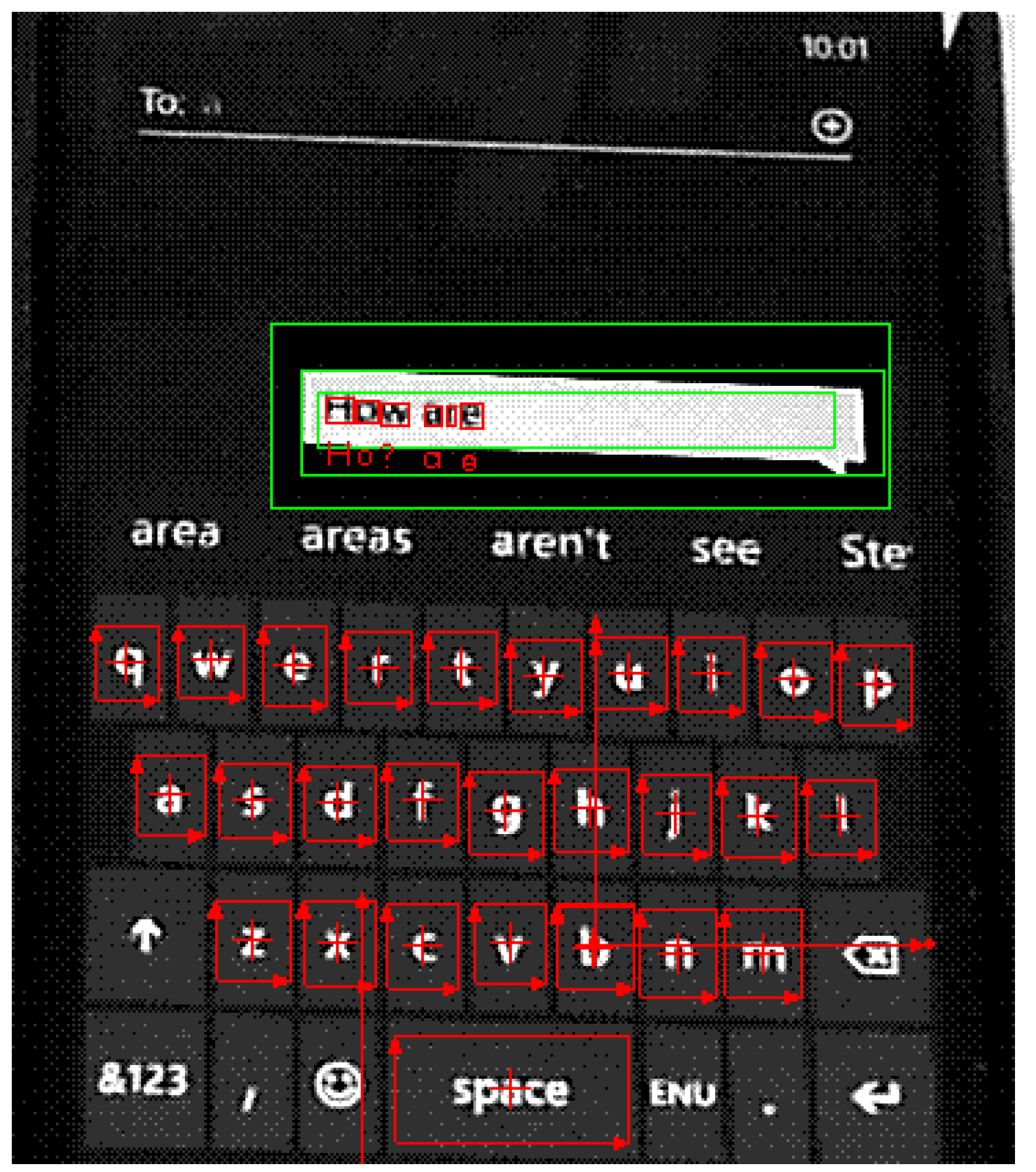
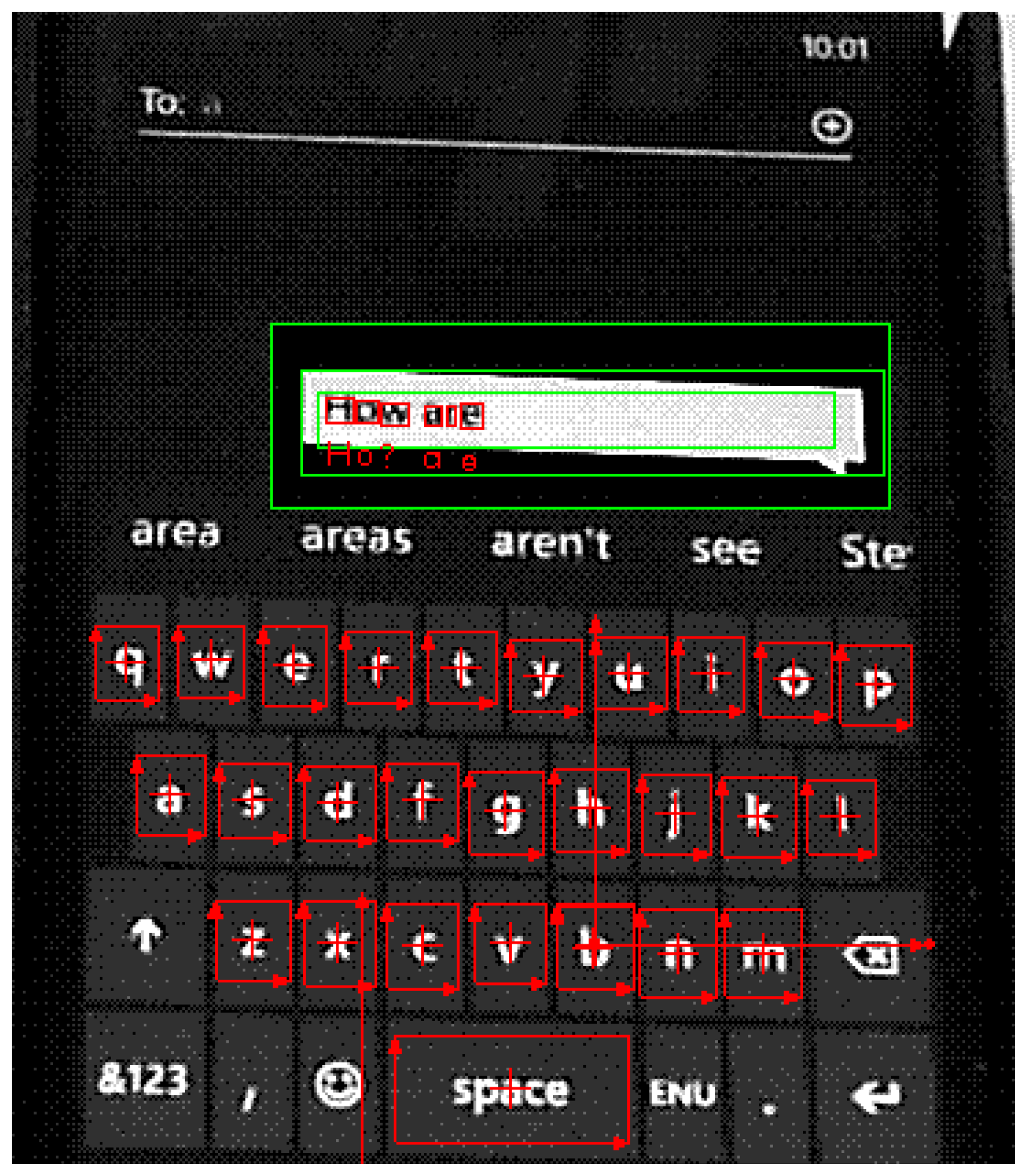
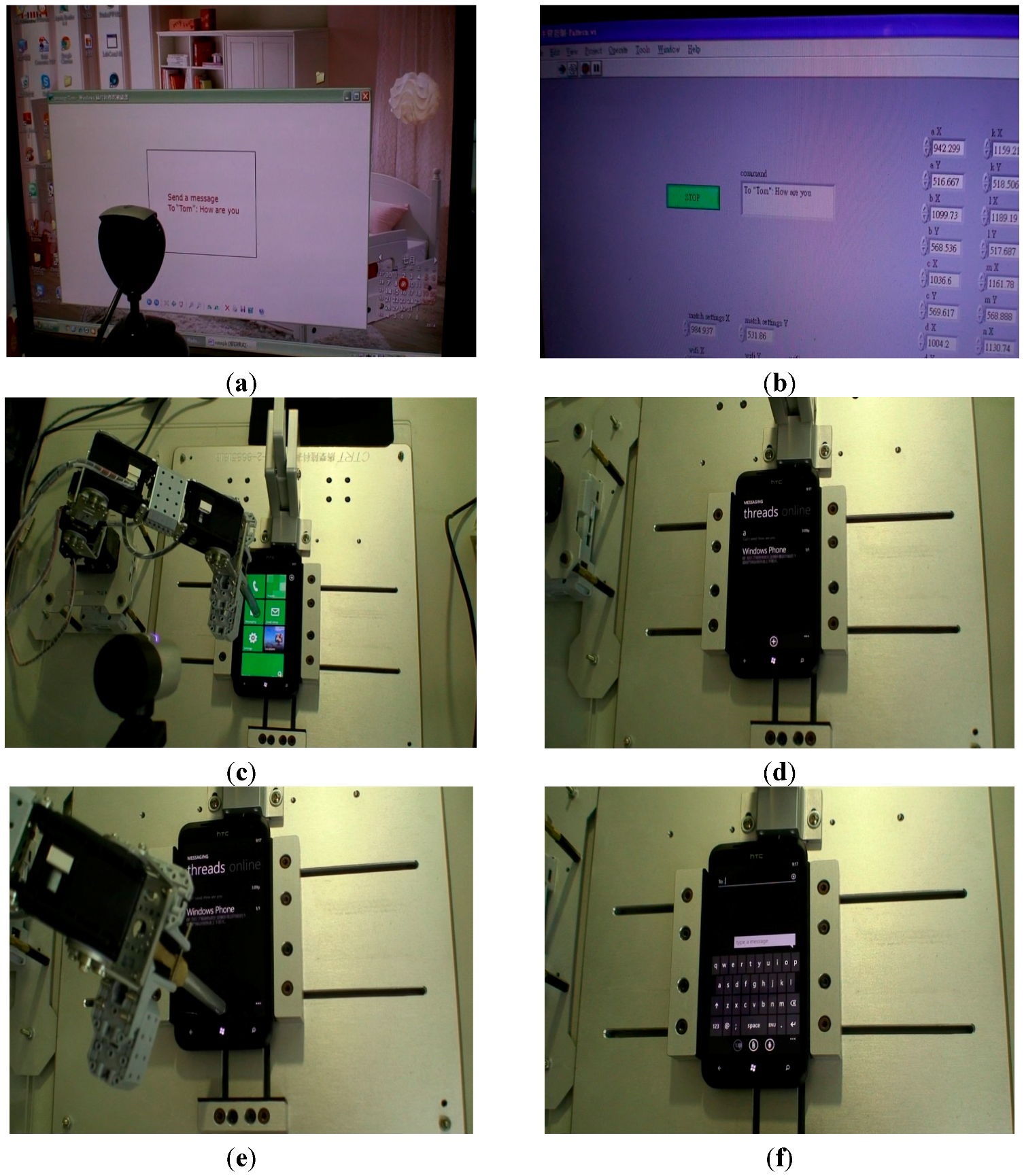
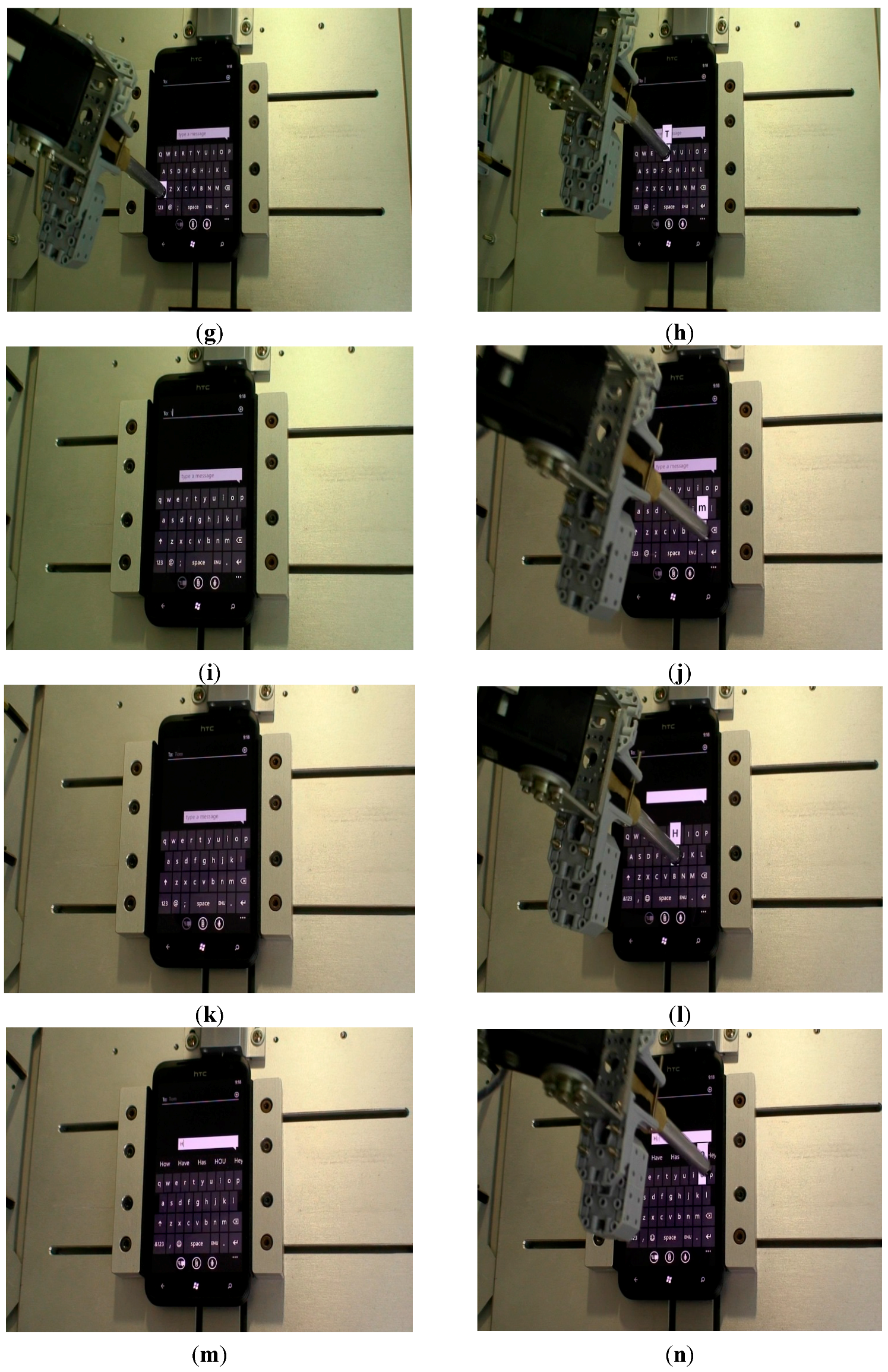
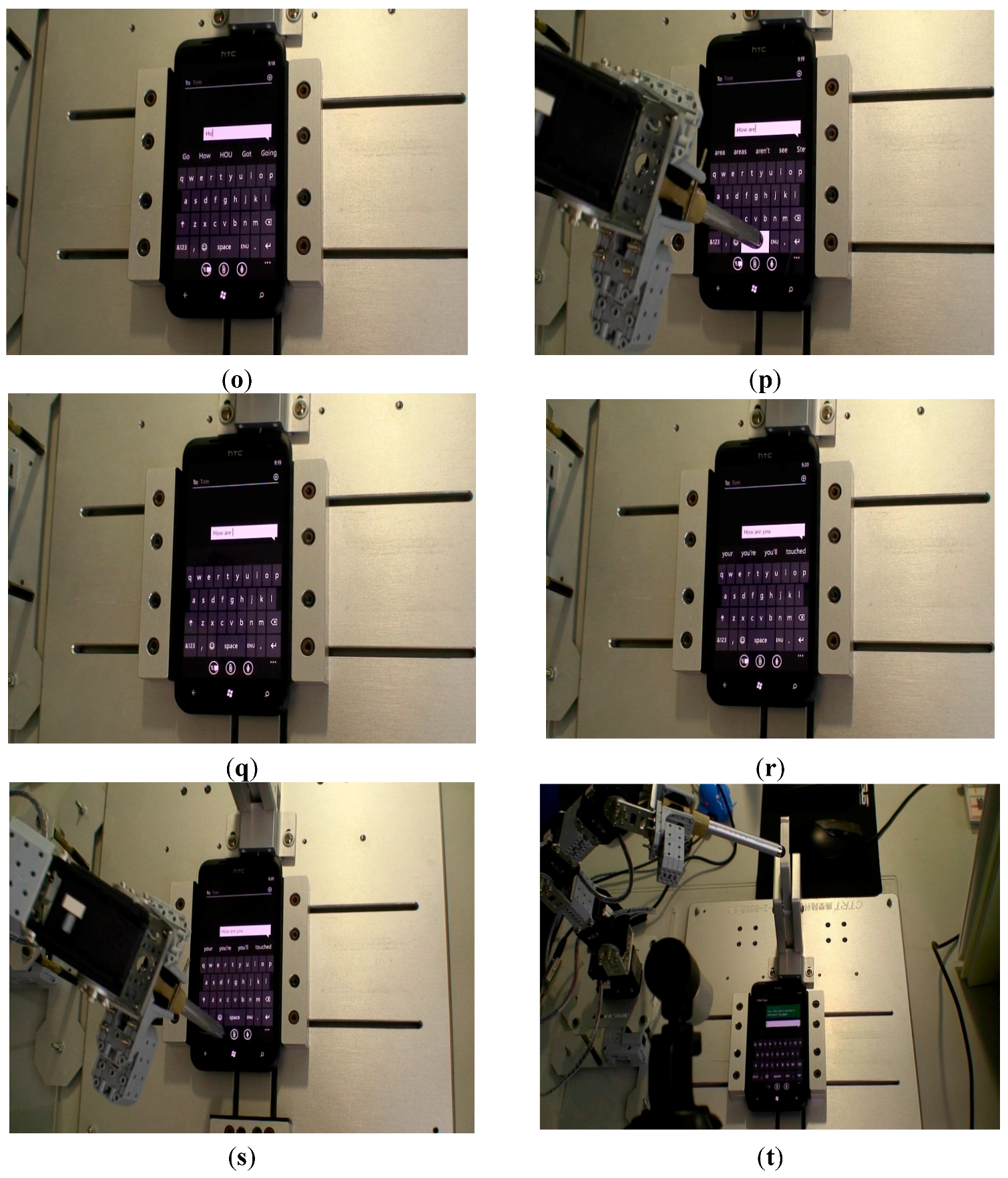
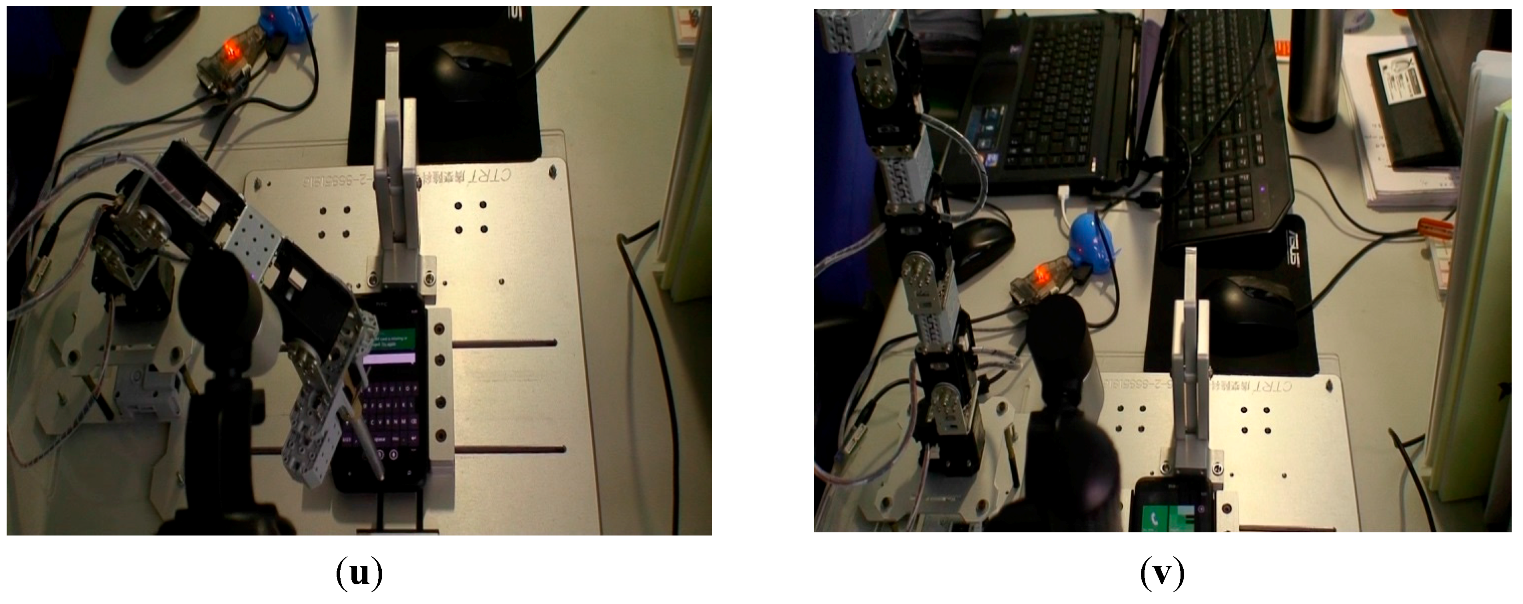
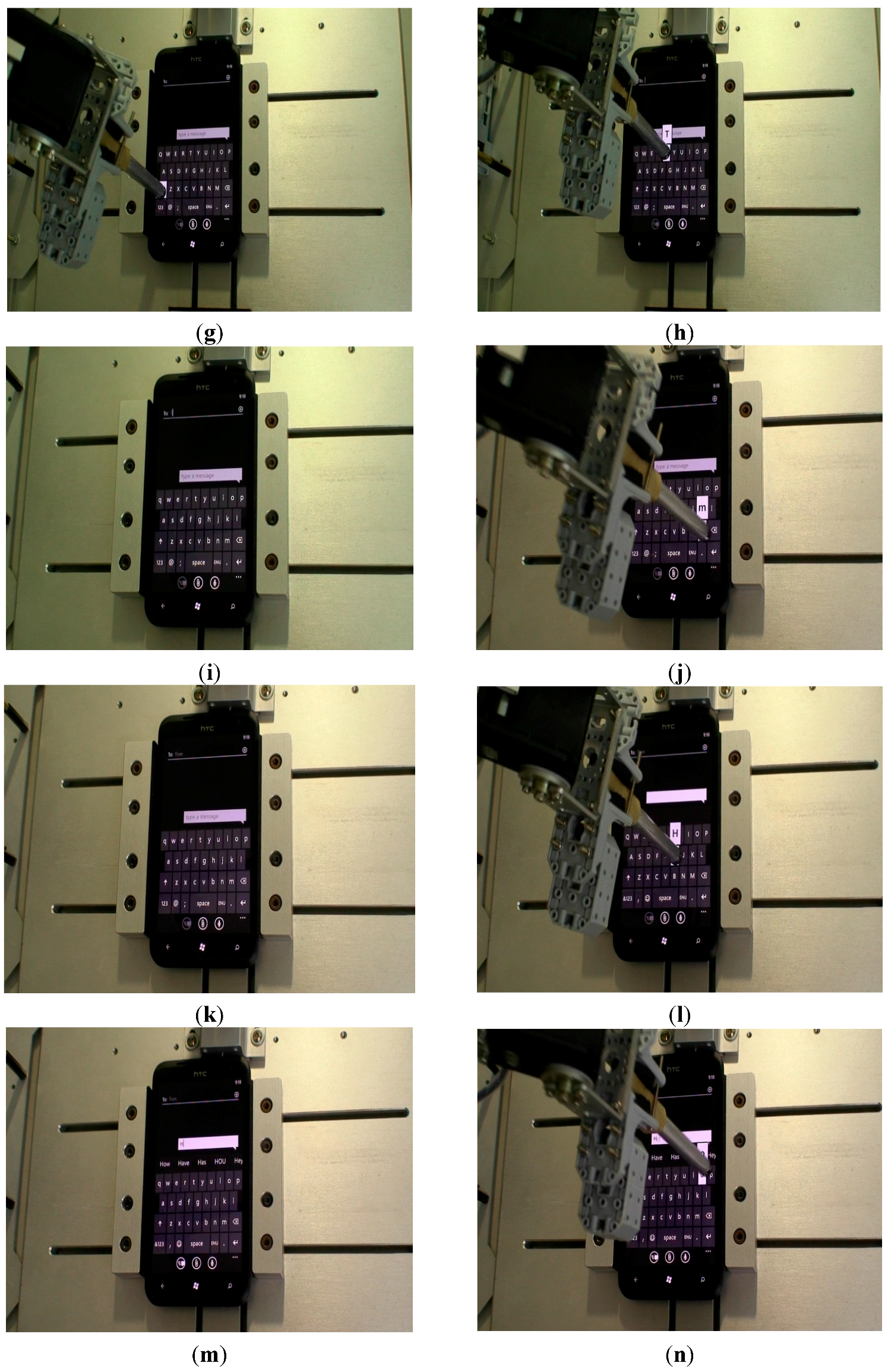
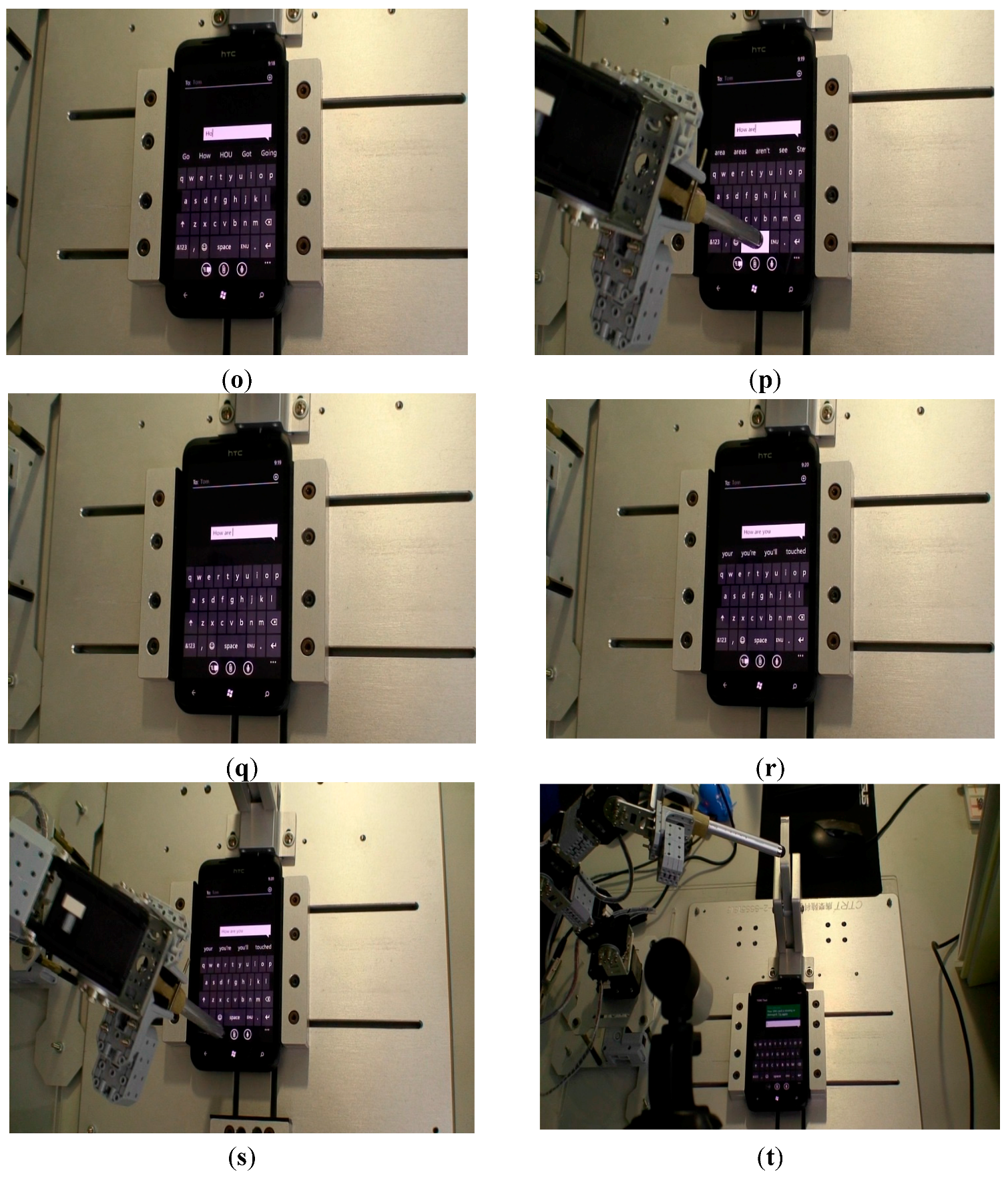
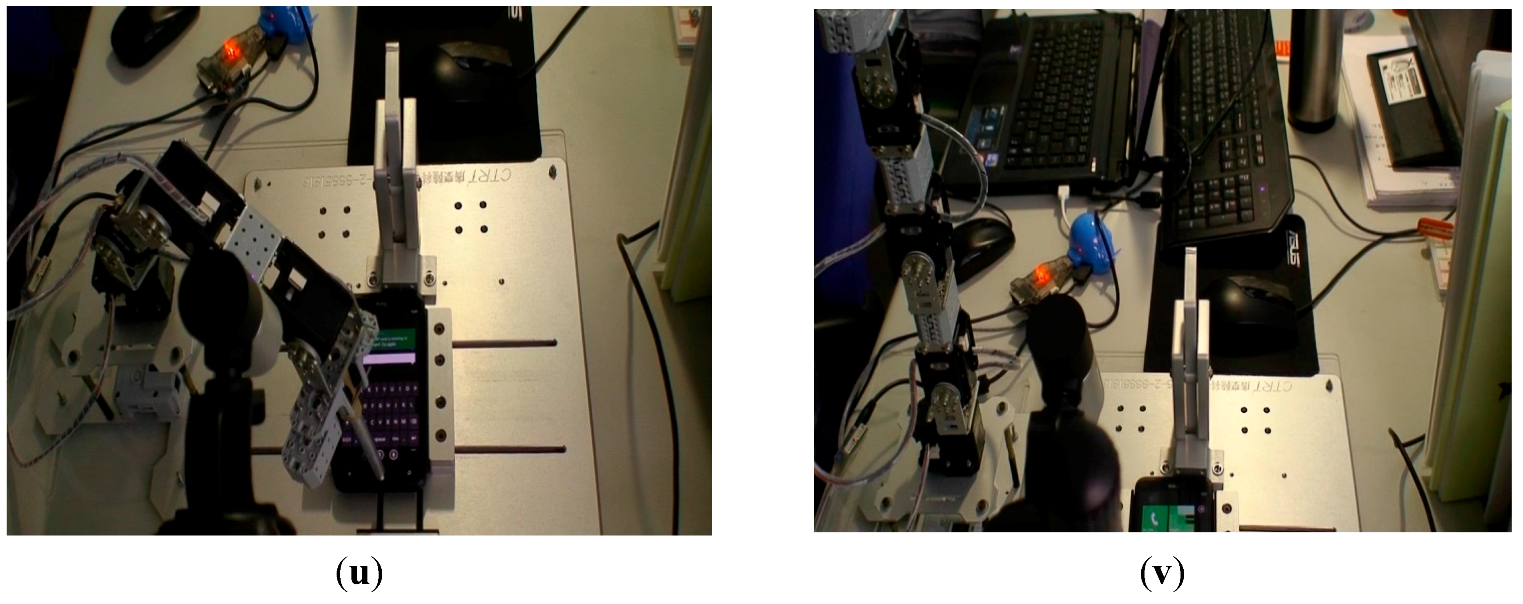
5.2. Send a Message

6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
| Joint | ||||
| 1 | 0 | 90° | 0 | |
| 2 | 0° | 0 | ||
| 3 | 0° | 0 | ||
| 4 | 0° | 0 |
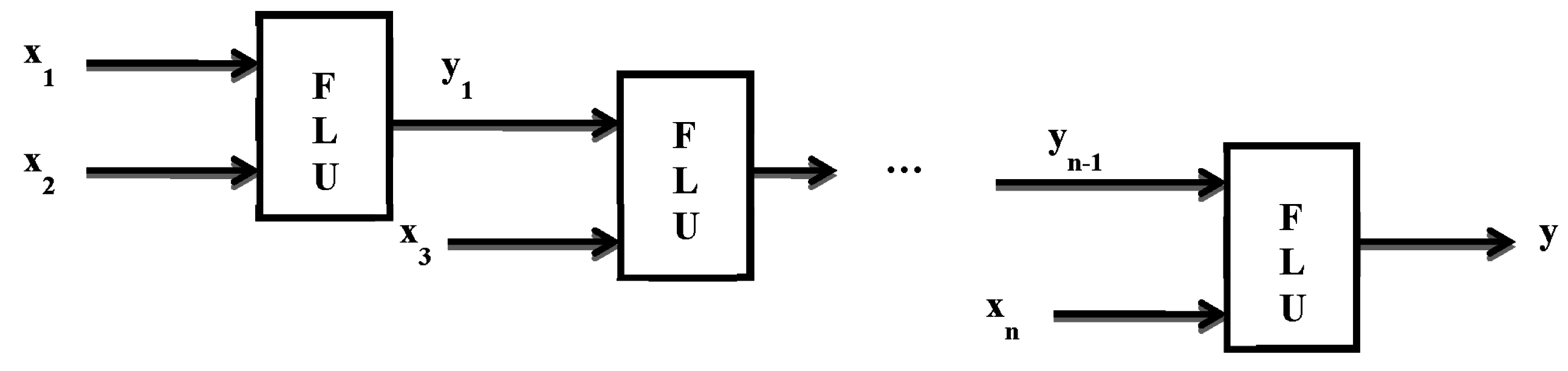
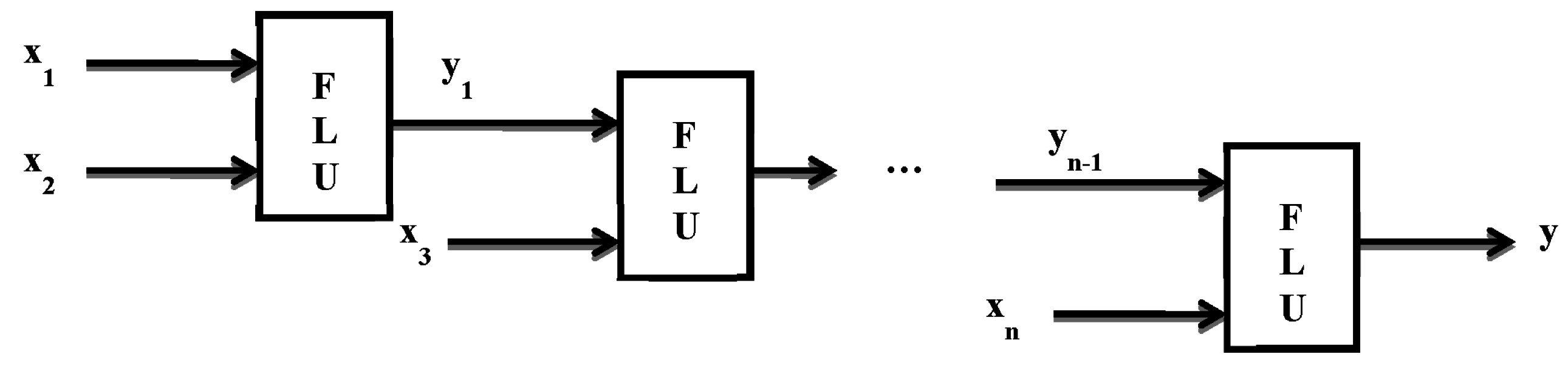
Appendix B
- Level 1:
- Rule 1: If DER is negative big, then M3 is NB.
- Rule 2: If DER is negative small, then M3 is NS.
- Rule 3: If DER is zero, then M3 is Z.
- Rule 4: If DER is positive small, then M3 is PS.
- Rule 5: If DER is positive big, then M3 is PB.
- Where DER is the distance error, which is dr minus r, and M3 is θ3.
- Level 2:
- Rule 1: If NER is negative big, then M4 is NB.
- Rule 2: If NER is negative small, then M4 is NS.
- Rule 3: If NER is zero, then M4 is Z.
- Rule 4: If NER is positive small, then M4 is PS.
- Rule 5: If NER is positive big, then M4 is PB.
- Where NER is the new distance error computed by M3 of level 1, which is dr minus the new r, and M4 is θ4.
- Level 3:
- Rule 1: If A2ER is negative big, then M2 is NB.
- Rule 2: If A2ER is negative small, then M2 is NS.
- Rule 3: If A2ER is zero, then M2 is Z.
- Rule 4: If A2ER is positive small, then M2 is PS.
- Rule 5: If A2ER is positive big, then M2 is PB.
- Where A2ER is the angle error of θ2 computed by M4 of level 2, which is θd2 minus θ2, and M2 is θ2.
- Level 4:
- Rule 1: If A1ER is negative big, then M1 is NB.
- Rule 2: If A1ER is negative small, then M1 is NS.
- Rule 3: If A1ER is zero, then M1 is Z.
- Rule 4: If A1ER is positive small, then M1 is PS.
- Rule 5: If A1ER is positive big, then M1 is PB.
- Where A1ER is the angle error of θ1 computed by M2 of level 3, which is θd1 minus θ1, and M1 is θ1.
References
- Manigpan, S.; Kiattisin, S.; Leelasantitham, A. A Simulation of 6R Industrial Articulated Robot Arm Using Backpropagation Neural Network. In Proceedings of the 2010 IEEE International Conference on Robotics & Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 823–826.
- Furuta, K.; Kosuge, K.; Mukai, N. Control of Articulated Robot Arm with Sensory Feedback: Laser Beam Tracking System. IEEE Trans. Ind. Electron. 1988, 35, 31–39. [Google Scholar] [CrossRef]
- Munasinghe, S.R.; Nakamura, M.; Goto, S.; Kyura, N. Optimum Contouring of Industrial Robot Arms under Assigned Velocity and Torque Constraints. IEEE Trans. Syst. Man Cybern. Part C 2001, 31, 159–167. [Google Scholar] [CrossRef]
- Koga, M.; Kosuge, K.; Furuta, K.; Nosaki, K. Corrdinated Motion Control of Robot Arms Based on the Virtual Internal Model. IEEE Trans. Robot. Autom. 1992, 8, 77–85. [Google Scholar] [CrossRef]
- Kennedy, C.W.; Desai, J.P. Modeling and Control of the Mitsubishi PA-10 Robot Arm Harmonic Drive System. IEEE Trans. Mechatron. 2005, 10, 263–274. [Google Scholar] [CrossRef]
- Efe, M.O. Fractional Fuzzy Adaptive Sliding-Mode Control of a 2-DOF Direct-Drive Robot Arm. IEEE Trans. Syst. Man Cybern. Part B 2008, 38, 1561–1570. [Google Scholar] [CrossRef] [PubMed]
- Daud, W.A.B.W.; Faizura, W.; Adly, M.A.; Elamvazuthi, I. Kinematic Modeling of Humanoid Arm. In Proceedings of the 2010 IEEE International Conference on Intelligent and Advanced Systems, Kuala Lumpur, Malaysia, 15–17 June 2010; pp. 1–4.
- Wang, W.J.; Huang, C.H.; Lai, I.H.; Chen, H.C. A Robot Arm for Pushing Elevator Buttons. In Proceedings of the 2010 SICE Annual Conference, Taipei, Taiwan, 18–21 August 2010; pp. 1844–1848.
- Yang, M.; Lu, G.; Li, J. An Inverse Kinematics Solution for Manipulators Based on Fuzzy Logic. In Proceedings of the 2001 IEEE International Conference on Info-Tech and Info-Net, Beijing, China, 29 October–1 November 2001; pp. 400–404.
- Arefi, R.; Sadigh, M.J. Fuzzy Inverse Kinematics Algorithm for Man and Machine Cooperation. In Proceedings of the 2011 IEEE International Conference on Mechatronics, Istanbul, Turkey, 13–15 April 2011; pp. 398–402.
- Bulanon, D.M.; Kataoka, T.; Okamoto, H.; Hata, S. Development of a Real-time Machine Vision System for the Apple Harvesting Robot. In Proceedings of the Annual Conference on SICE, Sapporo, Japan, 4–6 August 2004; pp. 595–598.
- Kragic, D.; Björkman, M.; Christensen, H.I.; Eklundh, J.O. Vision for Robotic Object Manipulation in Domestic Settings. Robot. Auton. Syst. 2005, 52, 85–100. [Google Scholar] [CrossRef]
- Lttoumeau, D.; Michaud, F.; Valin, J.M.; Proulx, C. Textual Message Read by a Mobile Robot. In Proceedings of the 2003 IEEE International Conference on Intelligent Robots and Systems, Las Vegas, NV, USA, 27–31 October 2003; pp. 2724–2729.
- Qadri, M.T.; Asif, M. Automatic Number Plate Recognition System for Vehicle Identification Using Optical Character Recognition. In Proceedings of the 2009 IEEE International Conference on Education Technology and Computer, Singapore, 17–20 April 2009; pp. 335–338.
- Tsai, P.C. Based on Inverse Kinematics for Robot Arm Control. Master’s Thesis, Department of Electrical Engineering, National Central University, Chungli, Taiwan, 2011. [Google Scholar]
- Vision Builder for Automated Inspection. Available online: http://www.ni.com/webcast/86/en/ (accessed on 8 March 2014).
- Peng, Y.L. A Video Surveillance System for Missing Object Detection with Reporting Capability. Master’s Thesis, Department of Computer Science and Information Engineering, National Central University, Chungli, Taiwan, 2009. [Google Scholar]
- Michaud, F.; Lttoumeau, D. Mobile Robot that can read symbols. In Proceedings of the 2001 IEEE International Symposium on Computational Intelligence in Robotics and Automation, Banff, AB, Canada, 29 July–1 August 2001; pp. 338–343.
- Pham, L.M.; Le, H.T.; Muddu, R.; Ryu, D. Real-time Eye Tracking Using a Smart Camera. In Proceedings of the 2011 IEEE Applied Imagery Pattern Recognition Workshop, Washington, DC, USA, 11–13 October 2011; pp. 1–7.
- Labview Discussion Page. Available online: http://www.labviewpro.net/forum_result.php?fid=1&changetype= 1&keyword=vision (accessed on 12 January 2013).
- Raju, G.V.S.; Zhou, J. Adaptive Hierarchical Fuzzy Control. IEEE Trans. Syst. Man Cybern. 1993, 23, 973–980. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Juang, J.-G.; Tsai, Y.-J.; Fan, Y.-W. Visual Recognition and Its Application to Robot Arm Control. Appl. Sci. 2015, 5, 851-880. https://doi.org/10.3390/app5040851
Juang J-G, Tsai Y-J, Fan Y-W. Visual Recognition and Its Application to Robot Arm Control. Applied Sciences. 2015; 5(4):851-880. https://doi.org/10.3390/app5040851
Chicago/Turabian StyleJuang, Jih-Gau, Yi-Ju Tsai, and Yang-Wu Fan. 2015. "Visual Recognition and Its Application to Robot Arm Control" Applied Sciences 5, no. 4: 851-880. https://doi.org/10.3390/app5040851
APA StyleJuang, J.-G., Tsai, Y.-J., & Fan, Y.-W. (2015). Visual Recognition and Its Application to Robot Arm Control. Applied Sciences, 5(4), 851-880. https://doi.org/10.3390/app5040851