
Multi-Source Information Fusion Diagnosis Method for Aero Engine


Abstract
1. Introduction
2. Methodology
2.1. Subsystem Analysis Method
2.1.1. Gas Path Analysis Method
2.1.2. Vibration Analysis Method
- (1)
- Rotor unbalance
- (2)
- The rotor is not centered
- (3)
- Foreign inhalation
- (4)
- Oil film oscillation
2.2. Information Fusion Algorithm
2.2.1. Bayesian Network
2.2.2. D-S Evidence Theory
3. Case Study
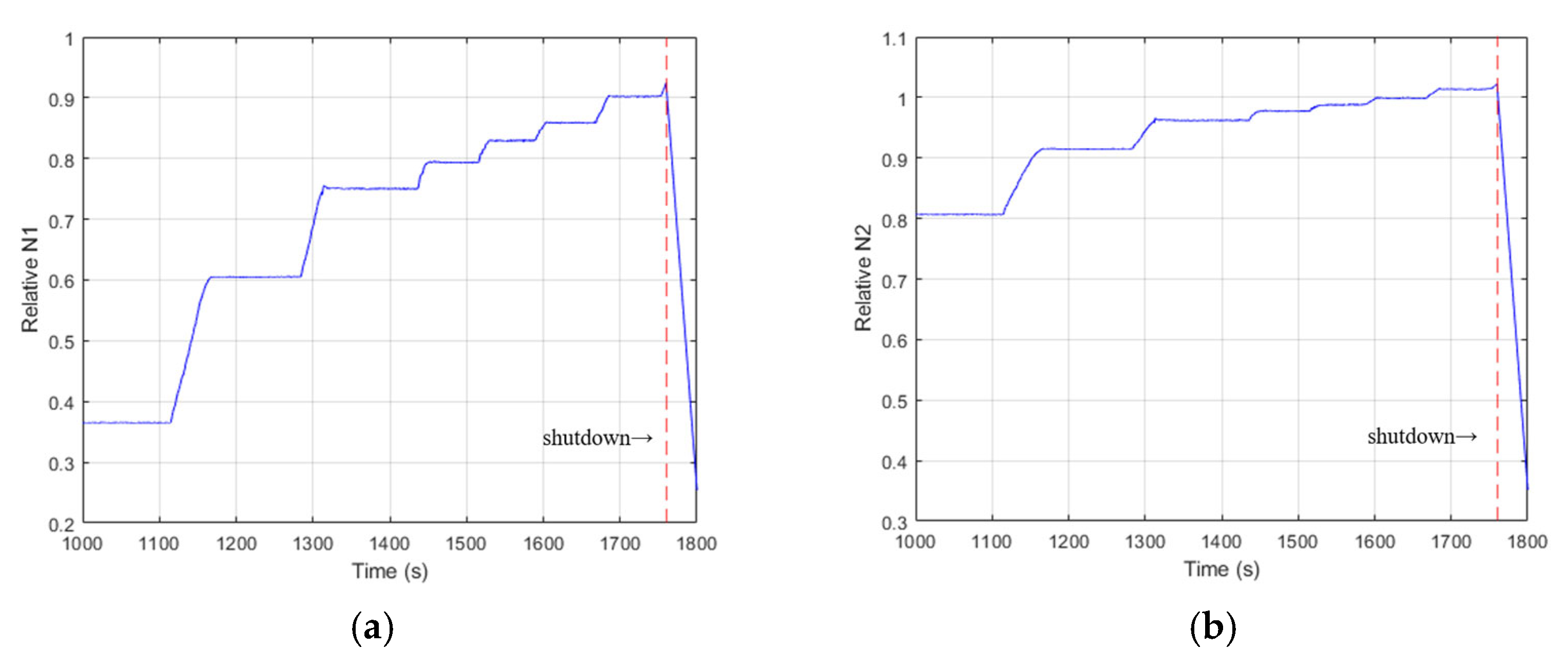
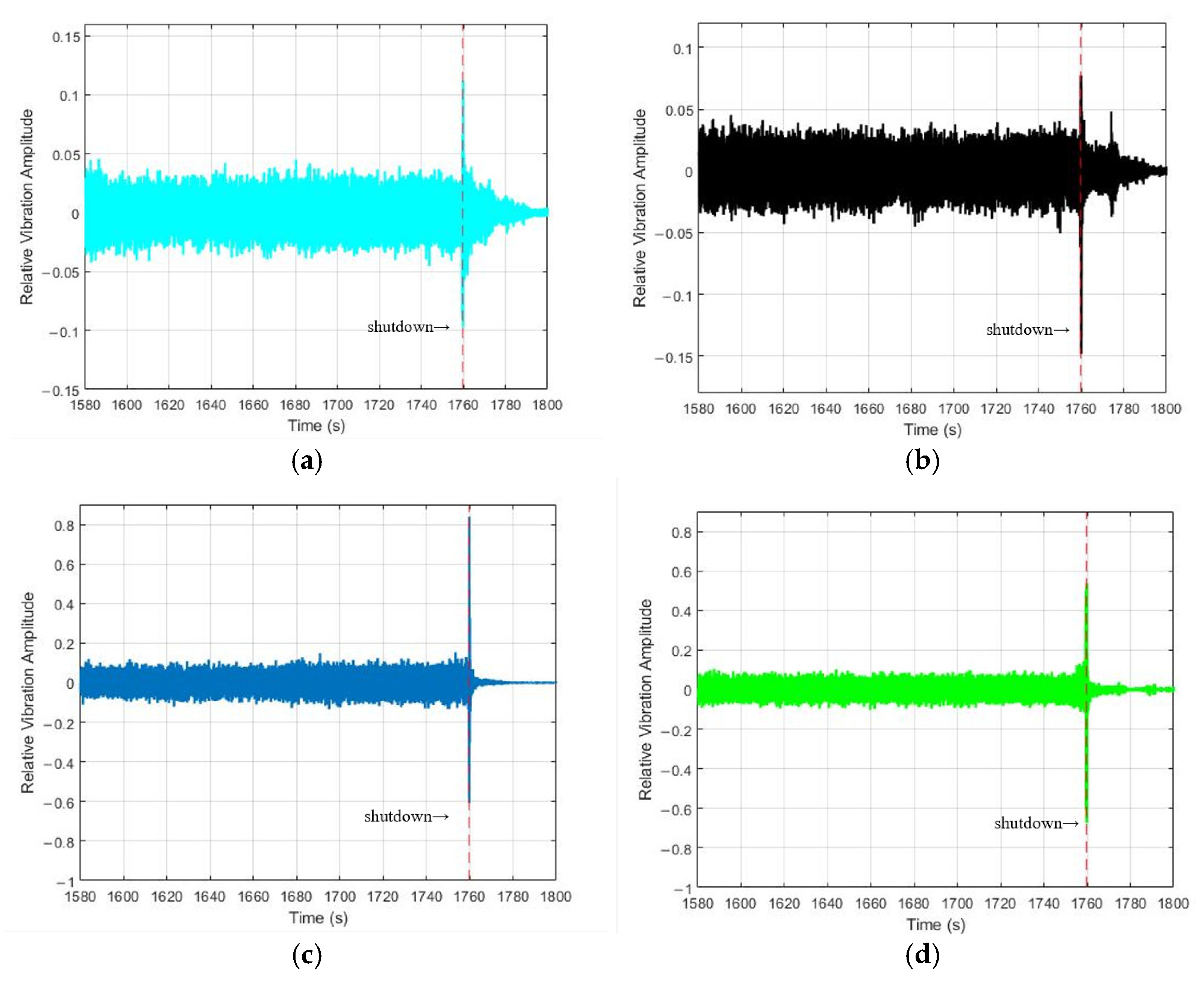
3.1. Vibration Fault Feature Analysis
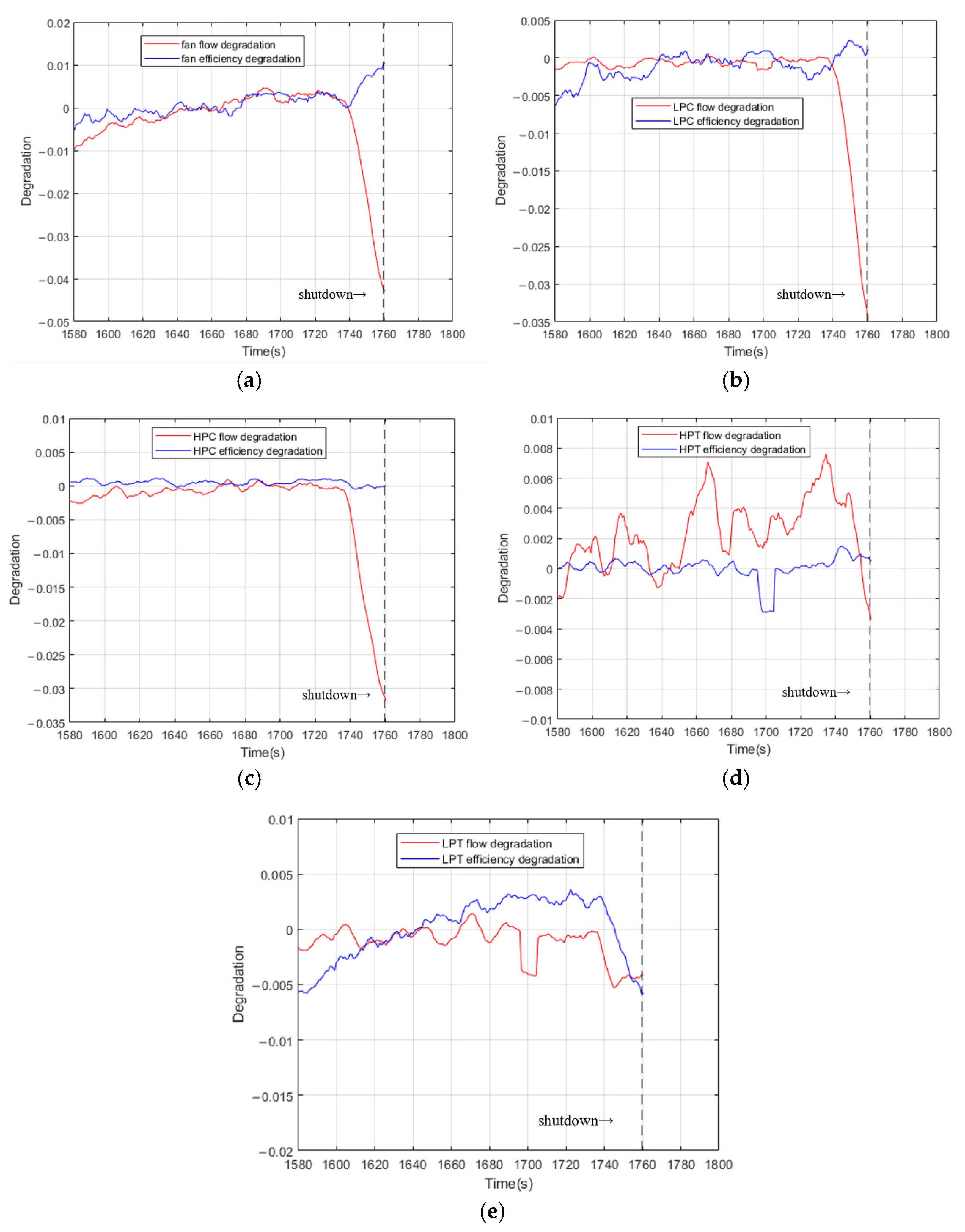
3.2. Gas Path Fault Feature Analysis
3.3. Information Fusion Diagnosis Analysis
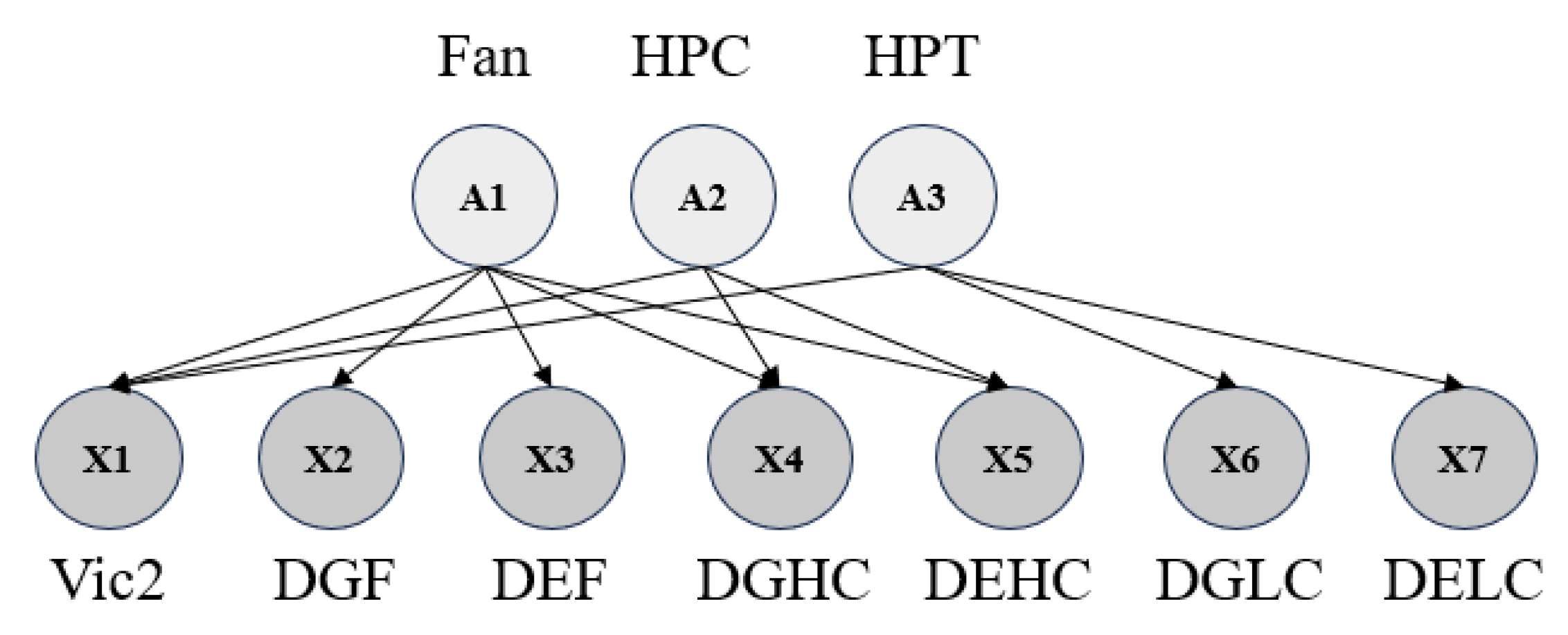
3.3.1. Information Fusion Based on Bayesian Network
3.3.2. Information Fusion Based on D-S Evidence Theory

4. Conclusions
- (1)
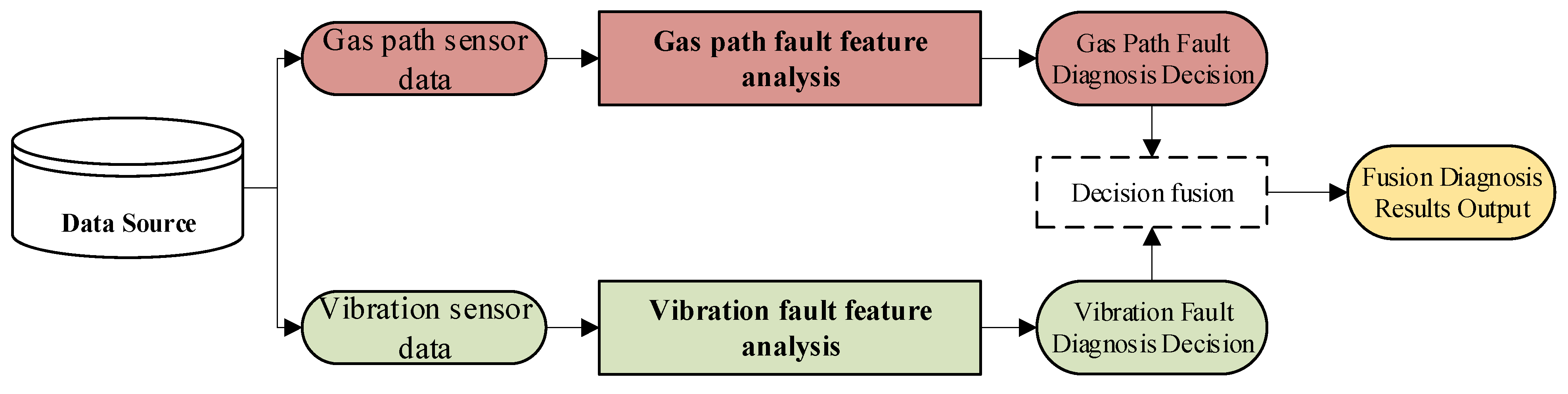
- This study builds a decision-level fusion framework integrating diagnostic features independently extracted from gas path, vibration, and lubrication subsystems. A GPA and vibration signal analysis are employed for fault characterization. Preliminary decisions are made based on subsystem-specific criteria, enabling effective fusion across heterogeneous data sources;
- (2)
- A two-layer Bayesian network is developed to capture dependencies between fault features and component-level failures. Without prior knowledge, it achieves a diagnostic confidence of 87.2%, increasing to 91.2% with prior knowledge. While Bayesian fusion improves diagnostic reliability, its application is constrained by the need for accurate prior knowledge and complex CPT construction;
- (3)
- To mitigate the dependence on prior knowledge, Dempster–Shafer (D-S) evidence theory is introduced for decision fusion. By incorporating Gaussian-type membership functions, the D-S-based method effectively handles uncertainty caused by sensor signal fluctuations. The fusion result achieves a diagnostic confidence of 99.6%, significantly reducing volatility in fault probability trends and demonstrating superior robustness and early fault detection capability compared to Bayesian-based fusion.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| ANN | Artificial neural network |
| CPT | Conditional probability table |
| DAG | Directed acyclic graph |
| DEF | Efficiency degradation of fan |
| DEHC | Efficiency degradation of high-pressure compressor |
| DEHT | Efficiency degradation of high-pressure turbine |
| DEKF | Extended Kalman filter with the data buffer bank |
| DELC | Efficiency degradation of low-pressure compressor |
| DELT | Efficiency degradation of low-pressure turbine |
| DGF | Flow rate degradation of fan |
| DGHC | Flow rate degradation of high-pressure compressor |
| DGHT | Flow rate degradation of high-pressure turbine |
| DGLC | Flow rate degradation of low-pressure compressor |
| DGLT | Flow rate degradation of low-pressure turbine |
| D-S | Dempster–Shafer |
| GPA | Gas path analysis |
| HBN | Hybrid Bayesian networks |
| HPC | High-pressure compressor |
| HPT | High-pressure turbine |
| KF | Kalman filter |
| LPC | Low-pressure compressor |
| LPT | Low-pressure turbine |
| LST-SATM-Net | Lightweight Spatial-Temporal Model Fusion Self-Attention Mechanism |
| N1 | Low-pressure rotor speed |
| N2 | high-pressure rotor speed |
| pt1 | Air inlet total pressure |
| pt13 | Fan outlet total pressure |
| pt25 | High-pressure compressor inlet pressure |
| pt3 | High-pressure compressor outlet pressure |
| pt45 | Low-pressure turbine inlet pressure |
| SDEKF | Self-tuning extended Kalman filter with the data buffer bank |
| SVM | Support vector machine |
| Tt1 | Air inlet temperature |
| Tt125 | Fan outlet total temperature |
| Tt25 | High-pressure compressor inlet temperature |
| Tt3 | High-pressure compressor outlet temperature |
| Tt45 | Low-pressure turbine inlet temperature |
| Tt5 | Low-pressure turbine outlet temperature |
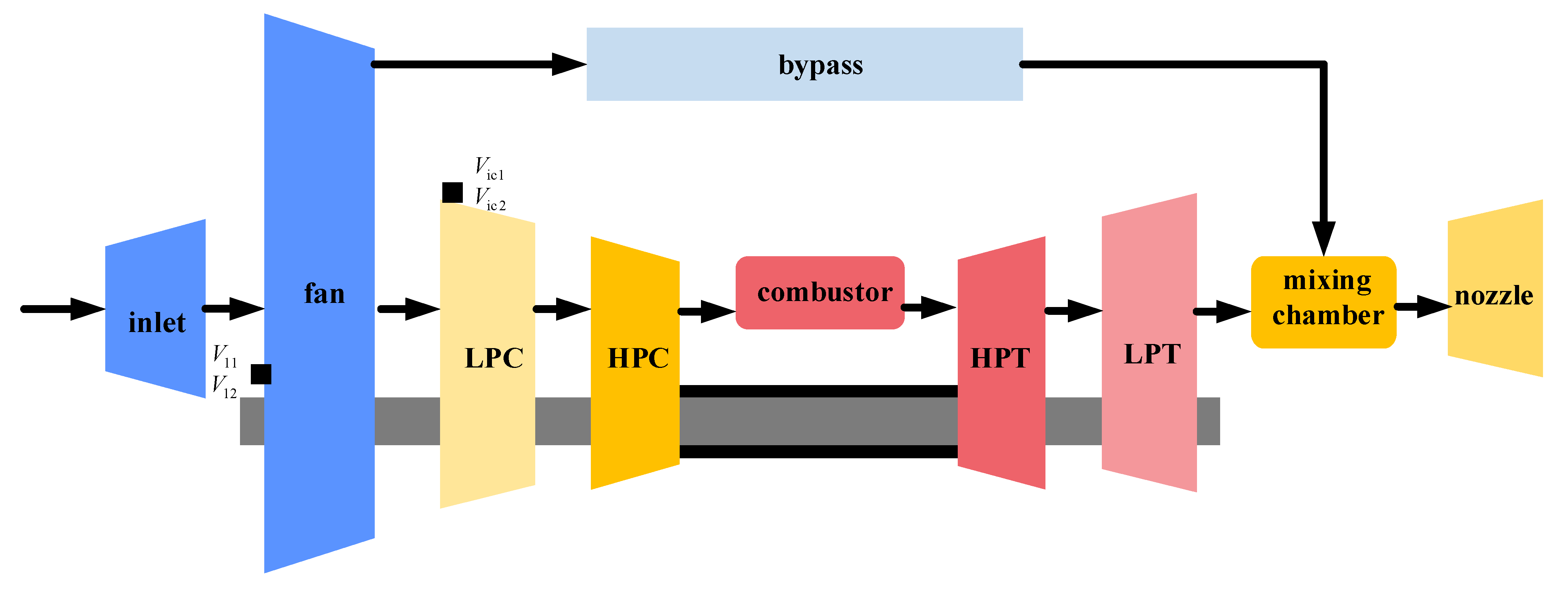
| V11 | Vibration measurement point 1 of the bearing housing |
| V12 | Vibration measurement point 2 of the bearing housing |
| Vic1 | Vibration measurement point 1 of the intermediate case |
| Vic2 | Vibration measurement point 2 of the intermediate case |
| Wf | Fuel flow |
References
- Shen, Y.; Khorasani, K. Hybrid multi-mode machine learning-based fault diagnosis strategies with application to aircraft gas turbine engines. Neural Netw. 2020, 130, 126–142. [Google Scholar] [CrossRef]
- Xu, M.; Liu, J.; Li, M.; Geng, J.; Wu, Y.; Song, Z. Improved hybrid modeling method with input and output self-tuning for gas turbine engine. Energy 2022, 238, 121672. [Google Scholar] [CrossRef]
- Lu, J.; Huang, J.; Lu, F. Kernel extreme learning machine with iterative picking scheme for failure diagnosis of a turbofan engine. Aerosp. Sci. Technol. 2020, 96, 105539. [Google Scholar] [CrossRef]
- Kibrete, F.; Woldemichael, D.E.; Gebremedhen, H.S. Multi-Sensor data fusion in intelligent fault diagnosis of rotating machines: A comprehensive review. Measurement 2024, 232, 114658. [Google Scholar] [CrossRef]
- Tang, S.; Yuan, S.; Zhu, Y. Deep learning-based intelligent fault diagnosis methods toward rotating machinery. IEEE Access 2019, 8, 9335–9346. [Google Scholar] [CrossRef]
- Zhang, H.; Long, L.; Dong, K. Detect and evaluate dependencies between aero-engine gas path system variables based on multiscale horizontal visibility graph analysis. Phys. A Stat. Mech. Its Appl. 2019, 526, 120830. [Google Scholar] [CrossRef]
- Togni, S.; Nikolaidis, T.; Sampath, S. A combined technique of Kalman filter, artificial neural network and fuzzy logic for gas turbines and signal fault isolation. Chin. J. Aeronaut. 2021, 34, 124–135. [Google Scholar] [CrossRef]
- Long, Z.; Bai, M.; Ren, M.; Liu, J.; Yu, D. Fault detection and isolation of aeroengine combustion chamber based on unscented Kalman filter method fusing artificial neural network. Energy 2023, 272, 127068. [Google Scholar] [CrossRef]
- Lu, F.; Gao, T.; Huang, J.; Qiu, X. A novel distributed extended Kalman filter for aircraft engine gas-path health estimation with sensor fusion uncertainty. Aerosp. Sci. Technol. 2019, 84, 90–106. [Google Scholar] [CrossRef]
- Pang, S.; Li, Q.; Feng, H. A hybrid onboard adaptive model for aero-engine parameter prediction. Aerosp. Sci. Technol. 2020, 105, 105951. [Google Scholar] [CrossRef]
- Zhou, D.; Yao, Q.; Wu, H.; Ma, S.; Zhang, H. Fault diagnosis of gas turbine based on partly interpretable convolutional neural networks. Energy 2020, 200, 117467. [Google Scholar] [CrossRef]
- Lan, G.; Cheng, N.; Li, Q. Comparison and fusion of various classification methods applied to aero-engine fault diagnosis. In Proceedings of the 2017 29th Chinese Control and Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; pp. 4754–4759. [Google Scholar] [CrossRef]
- Wang, C.; Lu, N.; Cheng, Y.; Jiang, B. A data-driven aero-engine degradation prognostic strategy. IEEE Trans. Cybern. 2019, 51, 1531–1541. [Google Scholar] [CrossRef]
- Hu, J.; Chen, M.; Tang, H.; Zhang, J. An adversarial transfer learning method based on domain distribution prediction for aero-engine fault diagnosis. Eng. Appl. Artif. Intell. 2024, 133, 108287. [Google Scholar] [CrossRef]
- Yang, T.; Li, G.; Yuan, S.; Qi, Y.; Yu, X.; Han, Q. The LST-SATM-net: A new deep feature learning framework for aero-engine hydraulic pipeline systems intelligent faults diagnosis. Appl. Acoust. 2023, 210, 109436. [Google Scholar] [CrossRef]
- Wang, H.; Jiang, W.; Deng, X.; Geng, J. A new method for fault detection of aero-engine based on isolation forest. Measurement 2021, 185, 110064. [Google Scholar] [CrossRef]
- Liu, X.; Chen, Y.; Xiong, L.; Wang, J.; Luo, C.; Zhang, L.; Wang, K. Intelligent fault diagnosis methods toward gas turbine: A review. Chin. J. Aeronaut. 2023, 37, 93–120. [Google Scholar] [CrossRef]
- Foo, P.H.; Ng, G.W. High-level information fusion: An overview. J. Adv. Inf. Fusion 2013, 8, 33–72. [Google Scholar]
- Hang, J.; Zhang, J.; Cheng, M. Fault diagnosis of wind turbine based on multi-sensors information fusion technology. IET Renew. Power Gener. 2014, 8, 289–298. [Google Scholar] [CrossRef]
- Huang, Y.; Tao, J.; Sun, G.; Wu, T.; Yu, L.; Zhao, X. A novel digital twin approach based on deep multimodal information fusion for aero-engine fault diagnosis. Energy 2023, 270, 126894. [Google Scholar] [CrossRef]
- Mack, L.; Biswas, G.; Koutsoukos, D.; Mylaraswamy, D. Learning bayesian network structures to augment aircraft diagnostic reference models. IEEE Trans. Autom. Sci. Eng. 2016, 14, 358–369. [Google Scholar] [CrossRef]
- Ademujimi, T.; Prabhu, V. Fusion-Learning of Bayesian network models for fault diagnostics. Sensors 2021, 21, 7633. [Google Scholar] [CrossRef]
- Xiong, H.; Peng, Y.; Hu, Y.; Zhang, L.; Li, Y. Vibration fault signal analysis and diagnosis of flue gas turbine. Eng. Fail. Anal. 2022, 134, 105981. [Google Scholar] [CrossRef]
- Chen, G. Vibration modelling and verifications for whole aero-engine. J. Sound Vib. 2015, 349, 163–176. [Google Scholar] [CrossRef]
- Stephenson, T.A. An Introduction to Bayesian Network Theory and Usage; IDIAP: Martigny, Switzerland, 2000; Available online: https://infoscience.epfl.ch/handle/20.500.14299/227920 (accessed on 16 February 2025).
- Xu, J.-G.; Zhao, Y.; Chen, J.; Han, C. A structure learning algorithm for Bayesian network using prior knowledge. J. Comput. Sci. Technol. 2015, 30, 713–724. [Google Scholar] [CrossRef]
- Pei, B.; Shin, D.-G. Reconstruction of biological networks by incorporating prior knowledge into Bayesian network models. J. Comput. Biol. 2012, 19, 1324–1334. [Google Scholar] [CrossRef]
- Wu, Y.; Ren, Z.; Zeng, Z. Fault diagnosis method based on DS evidence theory. In Proceedings of the 2010 Prognostics and System Health Management Conference, Macao, China, 12–14 January 2010; pp. 1–4. [Google Scholar] [CrossRef]
- Sun, J.; Zuo, H.; Liang, K.; Chen, Z. Bayesian network-based multiple sources information fusion mechanism for gas path analysis. J. Propuls. Power 2016, 32, 611–619. [Google Scholar] [CrossRef]
- Mirhosseini, A.M.; Adib Nazari, S.; Maghsoud Pour, A.; Etemadi Haghighi, S.; Zareh, M. Probabilistic failure analysis of hot gas path in a heavy-duty gas turbine using Bayesian networks. Int. J. Syst. Assur. Eng. Manag. 2019, 10, 1173–1185. [Google Scholar] [CrossRef]
- Zhou, D.; Huang, D.; Hao, J.; Wu, H.; Chang, C.; Zhang, H. Fault diagnosis of gas turbines with thermodynamic analysis restraining the interference of boundary conditions based on STN. Int. J. Mech. Sci. 2021, 191, 106053. [Google Scholar] [CrossRef]
- Diakunchak, I.S. Performance deterioration in industrial gas turbines. J. Eng. Gas Turbines Power 1992, 114, 161–168. [Google Scholar] [CrossRef]
- Li, Y.G. Gas turbine performance and health status estimation using adaptive gas path analysis. J. Eng. Gas Turbines Power 2010, 132, 041701. [Google Scholar] [CrossRef]
- Hadroug, N.; Hafaifa, A.; Alili, B.; Iratni, A.; Chen, X. Fuzzy diagnostic strategy implementation for gas turbine vibrations faults detection: Towards a characterization of symptom–fault correlations. J. Vib. Eng. Technol. 2021, 10, 225–251. [Google Scholar] [CrossRef]
- Saadat, B.; Kouzou, A.; Hafaifa, A.; Guemana, M. Gas Turbine Supervision Based on Vibration Analysis and Measurement: Gas Compression Station Investigation. In Advances in Technical Diagnostics, Proceedings of the 6th International Congress on Technical Diagnostic, ICDT2016, Gliwice, Poland, 12–16 September 2016; Springer: Berlin/Heidelberg, Germany, 2018; pp. 1–14. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gas Path Fault Features | Description |
|---|---|
| DEF | Efficiency degradation of fan |
| DGF | Flow rate degradation of fan |
| DEHC | Efficiency degradation of high-pressure compressor |
| DGHC | Flow rate degradation of high-pressure compressor |
| DELC | Efficiency degradation of low-pressure compressor |
| DGLC | Flow rate degradation of low-pressure compressor |
| DEHT | Efficiency degradation of high-pressure turbine |
| DGHT | Flow rate degradation of high-pressure turbine |
| DELT | Efficiency degradation of low-pressure turbine |
| DGLT | Flow rate degradation of low-pressure turbine |
| Symbolic Meaning | Symbolic Representation |
|---|---|
| Vibration measurement point 1 of the bearing housing | |
| Vibration measurement point 2 of the bearing housing | |
| Vibration measurement point 1 of the intermediate case | |
| Vibration measurement point 2 of the intermediate case |
| Component | Node | States | |
|---|---|---|---|
| 0 (Healthy) | 1 (Faulted) | ||
| Fan | A1 | 0.97 | 0.03 |
| HPC | A2 | 0.99 | 0.01 |
| HPT | A3 | 0.99 | 0.01 |
| Fault Feature | Without Prior Knowledge | With Prior Knowledge | ||
|---|---|---|---|---|
| A1 = 0 | A1 = 1 | A1 = 0 | A1 = 1 | |
| Vic | N(0, 0.5) | N(220, 0.5) | N(0, 0.8) | N(220, 0.01) |
| DGF | N(0, 0.5) | N(−0.05, 0.5) | N(0, 0.8) | N(−0.05, 0.01) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, K.; Shen, Y.; Chen, Y.; Zhang, H. Multi-Source Information Fusion Diagnosis Method for Aero Engine. Appl. Sci. 2025, 15, 5083. https://doi.org/10.3390/app15095083
Yin K, Shen Y, Chen Y, Zhang H. Multi-Source Information Fusion Diagnosis Method for Aero Engine. Applied Sciences. 2025; 15(9):5083. https://doi.org/10.3390/app15095083
Chicago/Turabian StyleYin, Kai, Yawen Shen, Yifan Chen, and Huisheng Zhang. 2025. "Multi-Source Information Fusion Diagnosis Method for Aero Engine" Applied Sciences 15, no. 9: 5083. https://doi.org/10.3390/app15095083
APA StyleYin, K., Shen, Y., Chen, Y., & Zhang, H. (2025). Multi-Source Information Fusion Diagnosis Method for Aero Engine. Applied Sciences, 15(9), 5083. https://doi.org/10.3390/app15095083