
Enhancing Safety in Autonomous Maritime Transportation Systems with Real-Time AI Agents

 ,
,  , , and
, , and
Abstract
1. Introduction
1.1. Background
1.2. Motivation
1.3. Objectives
- To analyze the current state of autonomous maritime systems and the integration of AI agents within these frameworks;
- To examine the AI techniques and methodologies employed for real-time data processing, obstacle detection, collision avoidance, and decision-making in autonomous vessels;
- To evaluate the effectiveness of AI-driven safety mechanisms in mitigating risks and ensuring compliance with maritime safety and environmental regulations;
- To identify the challenges and limitations associated with deploying real-time AI agents in autonomous maritime systems and propose potential solutions;
- To present case studies and practical applications that demonstrate the implementation and impact of AI agents on maritime safety and sustainability.
2. Review Methodology
2.1. Formulation of Research Questions
2.2. Selection of Academic Databases
2.3. Development and Implementation of Search Strategy
2.4. Establishment of Inclusion and Exclusion Criteria
2.5. Systematic Data Extraction Process
2.6. Rigorous Quality Assessment
2.7. Thematic Data Synthesis and Analysis
2.8. Acknowledgment of Methodological Limitations
2.9. Ethical Considerations in Literature Review
2.10. Documentation and Replicability of the Review Process
3. Literature Review
3.1. Autonomous Maritime Systems
3.2. AI for Enhancing Maritime Safety: State of the Art
3.3. Regulatory Constraints Shaping the Design of Autonomous Agents
3.4. Real-Time Processing: A Bottleneck and Enabler for AI Agents
- A.
- High Data Volume and Velocity.
- Sensor fusion from multiple, high-frequency data streams generates a continuous influx of unstructured data. Without optimized infrastructure, AI models can experience latency that renders decisions obsolete by the time they are made [59].
- B.
- Latency Constraints.
- Delays in perception-to-action cycles are unacceptable in safety-critical systems. AI agents must operate within strict latency budgets, often in the range of milliseconds, especially in near-collision scenarios or in unpredictable weather conditions.
- C.
- Edge Computing Requirements.
- Given the limited bandwidth and intermittent connectivity at sea, cloud-based processing is often insufficient. Instead, edge computing—processing data directly on-board—is increasingly adopted to reduce reliance on external servers and improve real-time responsiveness [59].
- D.
- Sensor Noise and Data Uncertainty.
- Harsh maritime conditions introduce significant noise into sensor data. AI agents must include robust filtering, data cleaning, and uncertainty quantification mechanisms to maintain high decision confidence [60].
- E.
- Scalability and Future Readiness.
- As autonomous vessels adopt more sophisticated sensors and algorithms, real-time processing systems must be scalable. Architectures must accommodate modular expansion without compromising timing guarantees.
- F.
- Cybersecurity and Integrity.
- Real-time data pipelines must be secured against tampering, spoofing, or corruption. AI agents must verify data integrity and maintain secure execution pathways to ensure trustworthy operations [62].
3.5. Identified Research Gaps and Agent-Based Perspective
- 1)
- Reason and act under uncertainty (e.g., degraded sensor input);
- 2)
- Negotiate legal constraints dynamically (e.g., SOLAS or MARPOL compliance);
- 3)
- Interact with humans and external systems (e.g., VTS, port infrastructure);
- 4)
- Adapt to evolving mission objectives or operational modes.
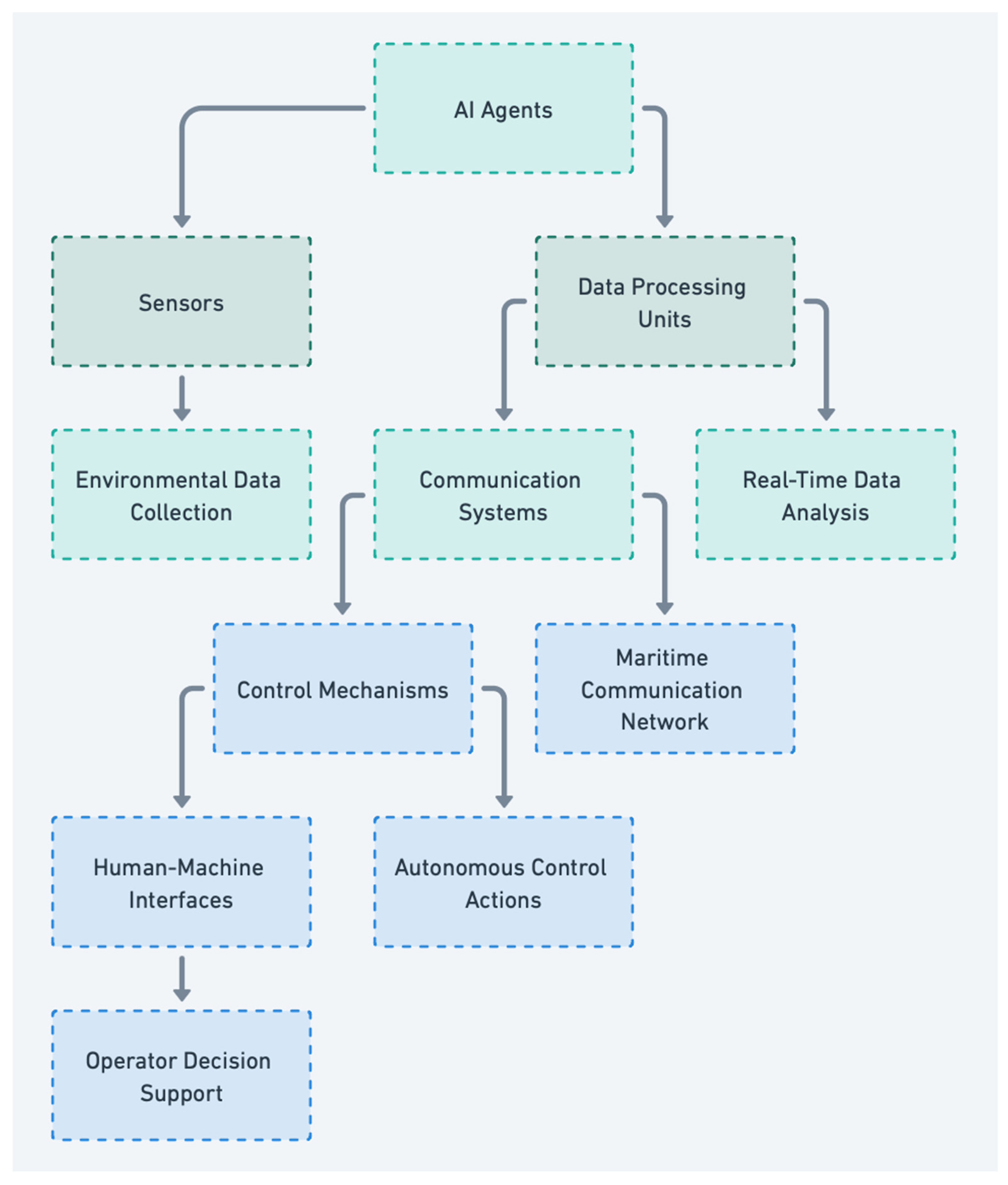
4. Architecture of Real-Time AI Agents for Autonomous Ships
4.1. System Layers and Agent Integration
4.2. Sensor Fusion and Perception Infrastructure
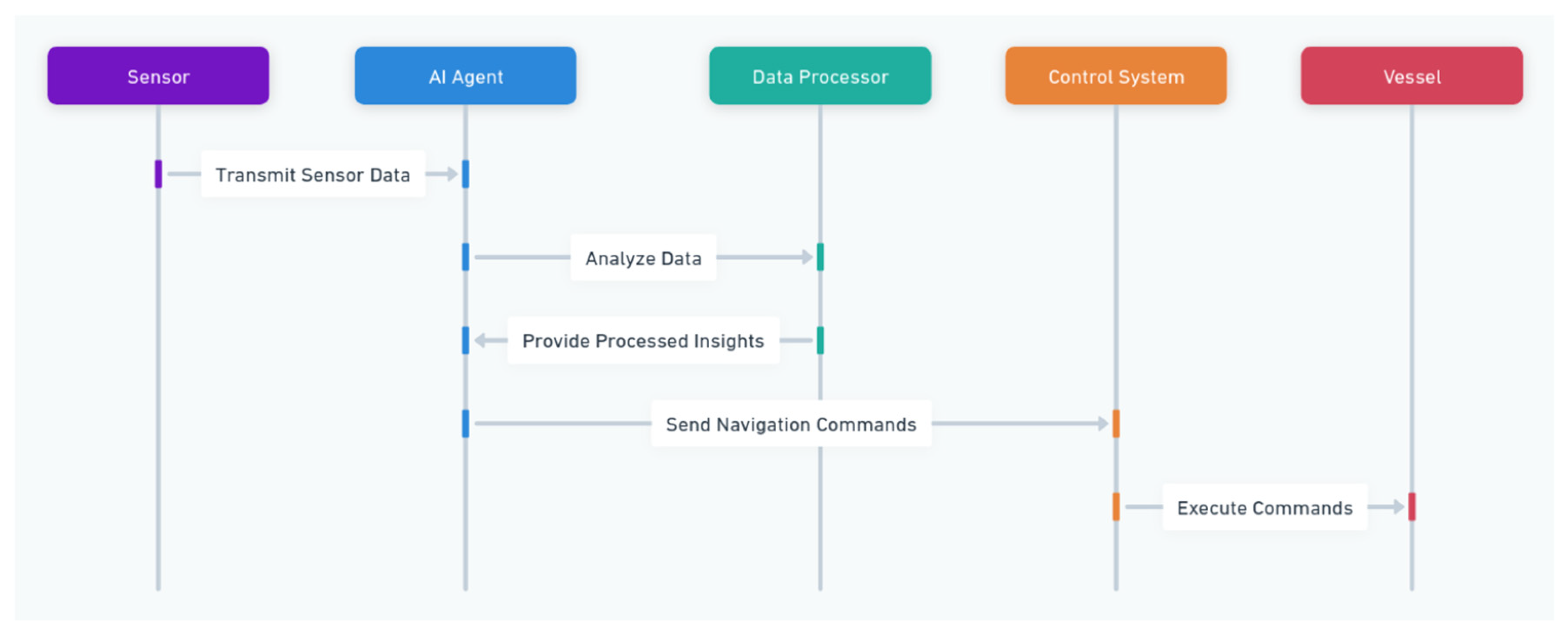
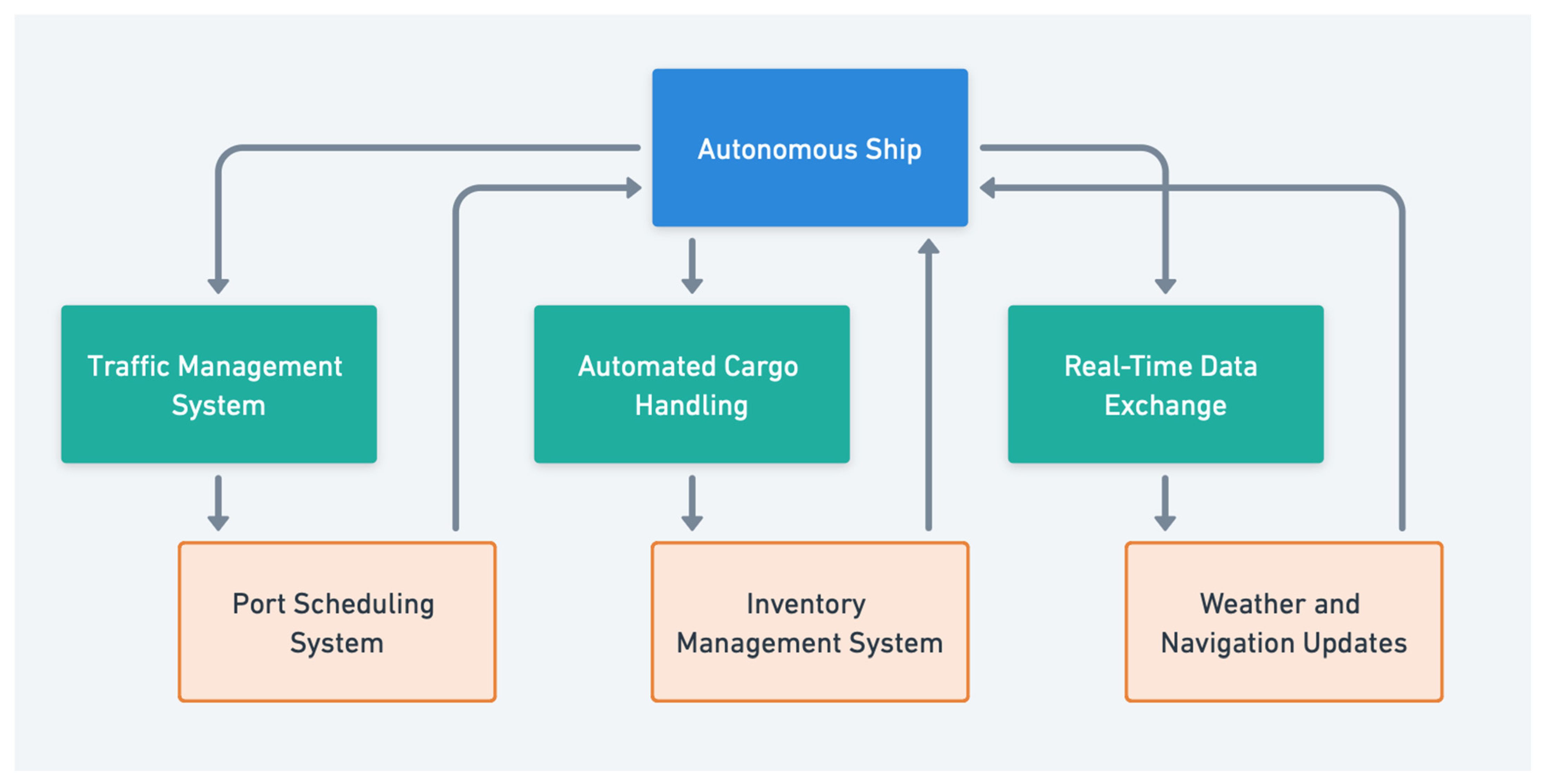
4.3. Communication Interfaces and Data Exchange
- 1)
- Very High Frequency (VHF) radio provides short-range communication with nearby vessels and coastal stations. This is used for voice- and data-based exchanges, particularly in congested waters or near ports [73].
- 2)
- Automatic Identification Systems (AIS) broadcast and receive real-time navigational data, including vessel identity, position, course, and speed, thereby enhancing situational awareness and supporting cooperative maneuvering [74].
- 3)
- Satellite communication systems ensure long-range data exchange, especially in open ocean areas where terrestrial networks are unavailable. This includes receiving weather data, regulatory updates, and mission instructions [69].
4.4. System Coherence and Real-Time Intelligence
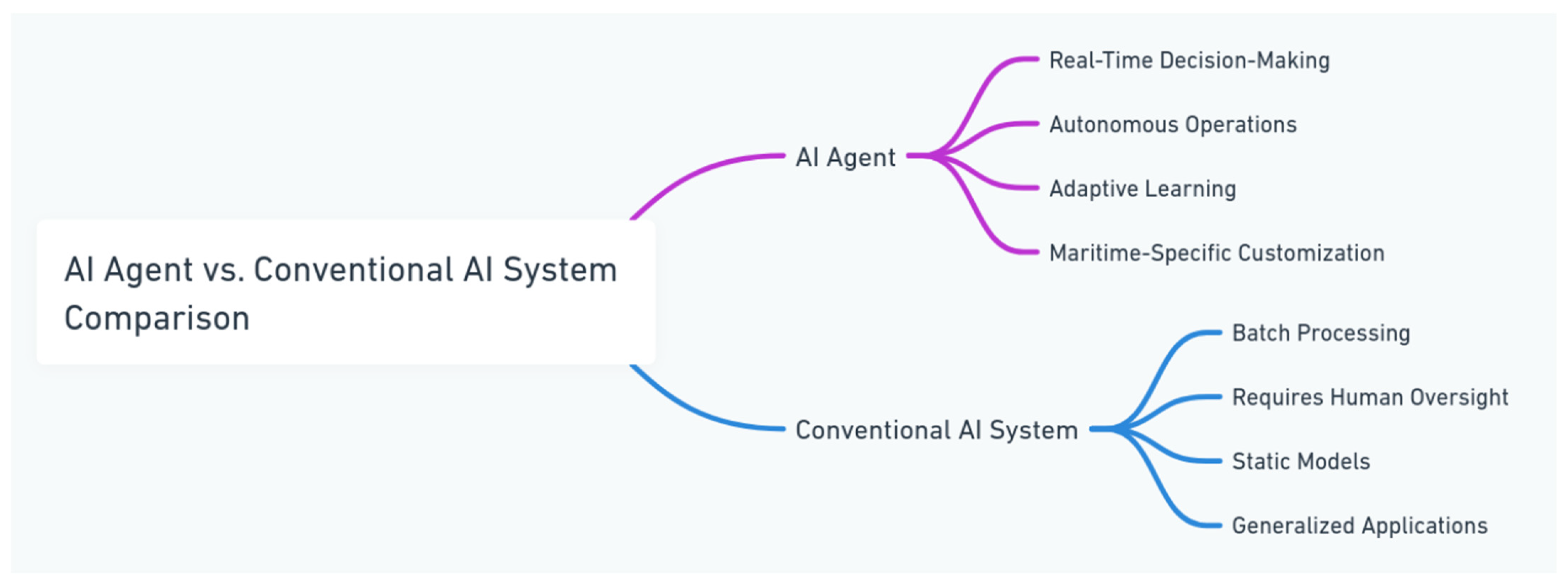
5. Distinguishing AI Agents in Autonomous Maritime Systems from Conventional AI Systems
5.1. Operational Context and Decision Constraints
5.2. Safety, Compliance, and Sustainability
5.3. Cybersecurity, Robustness, and Fault Tolerance
- 1)
- Encrypted communications;
- 2)
- Secure authentication protocols;
- 3)
- Tamper-proof logging;
- 4)
- Real-time anomaly detection for detecting cyber intrusions.
- 1)
- Monitor their own state via self-diagnostics;
- 2)
- Perform redundant computation across subsystems;
- 3)
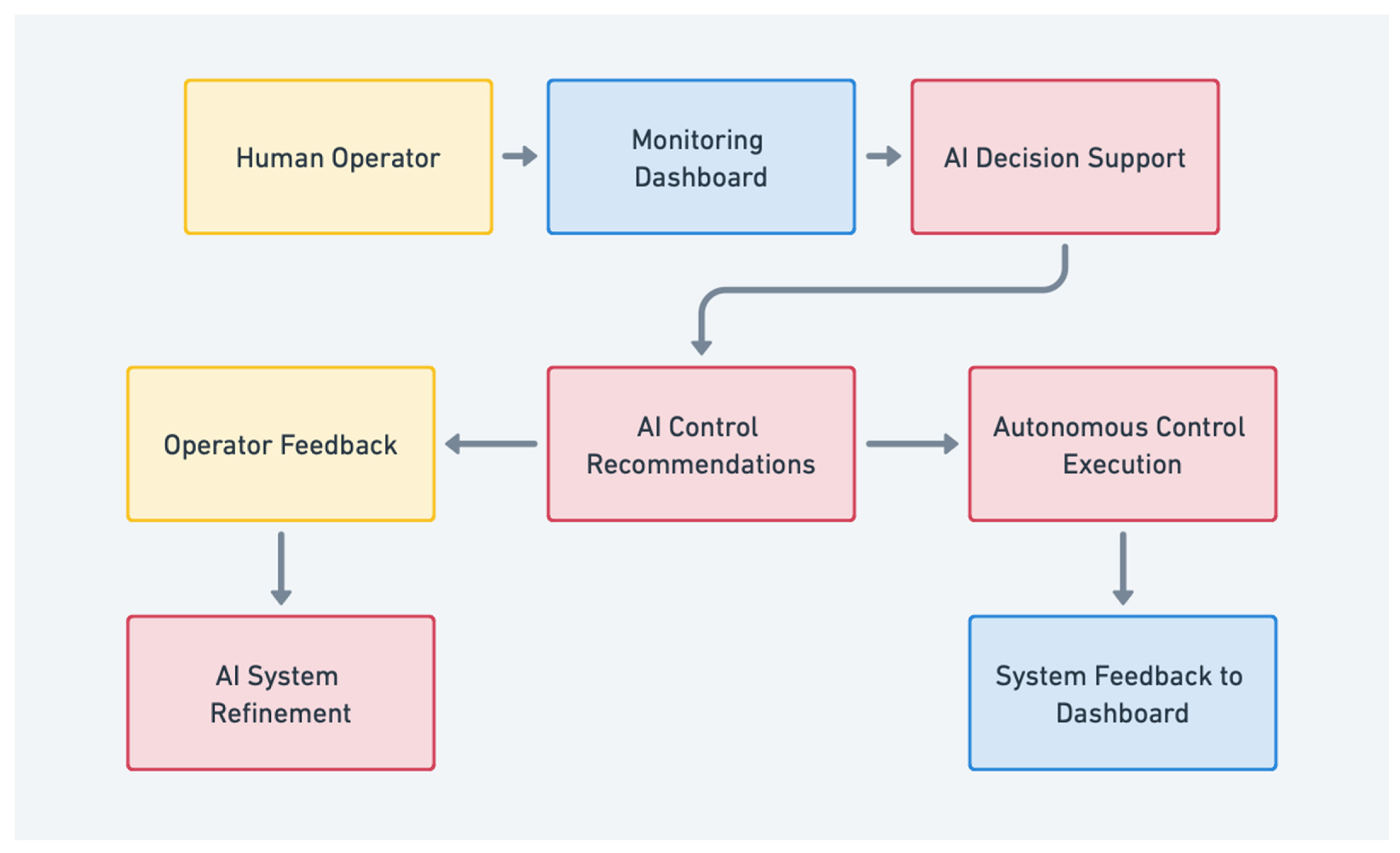
5.4. Human–AI Collaboration and Learning in Maritime Contexts
- Clear status reporting during mission execution;
- Real-time alerts and explanations during uncertain or abnormal conditions;
- Adjusting behavior in response to local weather or sea state changes;
- Learning new port approach procedures or traffic rules;
- Onboard (edge) learning from local sensor and event data,
- Fleet-wide updates based on collective mission logs,
- Operator feedback loops where human judgment enhances or corrects system behavior.
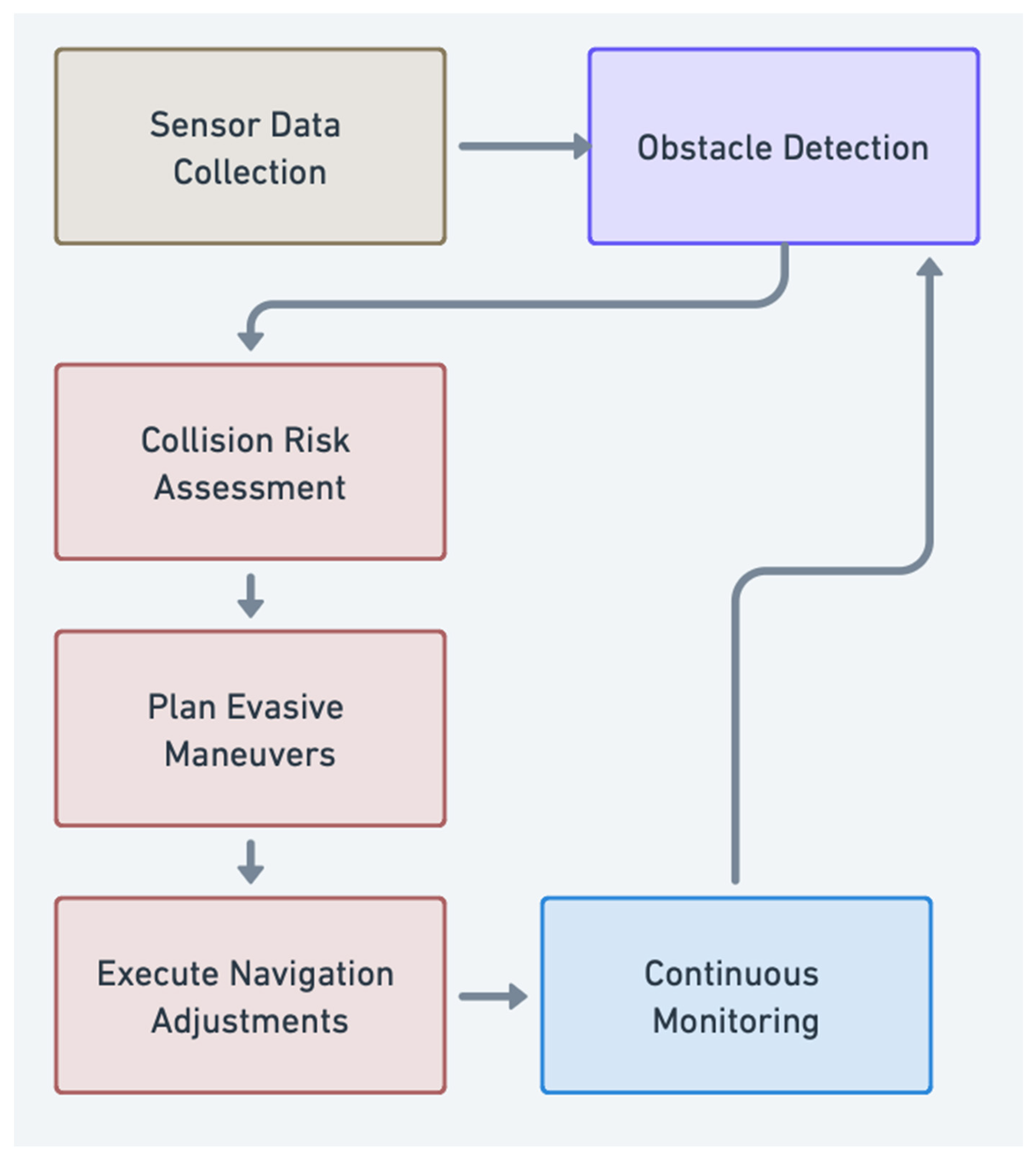
6. Safety Mechanisms Enabled by AI Agents
6.1. AI-Driven Collision Avoidance
6.2. Fault Detection and Predictive Maintenance
6.3. Emergency Coordination and Autonomy During Crisis
- a)
- Onboard sensors (e.g., engine status, structural strain gauges, bilge water levels);
- b)
- Environmental detectors (e.g., barometric pressure, wave height);
- c)
- Communication systems (e.g., distress calls, AIS alerts).
- a)
- Deploy bilge pumps;
- b)
- Reroute propulsion to stabilize heading;
- c)
- Broadcast automated Mayday messages via AIS and satellite;
- d)
- Provide a real-time diagnostic feed to the nearest rescue coordination center.
6.4. Redundancy and System Resilience
- a)
- Entering controlled drift or “hold position” mode;
- b)
- Gradually reducing propulsion while broadcasting distress to surrounding vessels;
- c)
- Autonomously navigating to the nearest safe harbor or anchor zone.
6.5. Coordinated Safety Architecture
- 1)
- Real-time data fusion between subsystems (e.g., connecting anomaly detection with propulsion control);
- 2)
- Prioritizing parallel threats (e.g., resolving whether an engine issue or a collision risk is more urgent);
- 3)
- Activating contingency protocols in a context-aware, scenario-specific manner.
- 1)
- Query the fault management system to ensure propulsion is responsive;
- 2)
- Cross-reference emergency protocols to verify crew alerts are active;
- 3)
- Check redundancy status to confirm the steering system is failover ready [98].
- 1)
- Integrator of data;
- 2)
- Arbiter of response logic;
- 3)
- Enforcer of maritime safety, legal, and operational standards.
7. Compliance with Maritime Regulations
7.1. Emission Control and Sustainability
7.2. Regulatory Compliance Monitoring
7.3. Data Governance and Security
7.4. Integration of Compliance Mechanisms
8. Implementation Challenges and Solutions
8.1. Technical Constraints and Computational Limitations
- 1)
- 2)
- 3)
- 4)
- Hybrid computing architectures combine onboard, edge, and cloud resources, enabling dynamic load distribution between critical local operations and secondary cloud-based processing [117].
8.2. Ethical and Legal Considerations
- 1)
- Accountability: Responsibility among developers, operators, and owners should be determine [149].
- 2)
- Transparency: AI systems are often “black boxes”, complicating oversight and auditability [150].
- 3)
- Privacy and surveillance: AI systems constantly record, analyze, and store sensitive operational data.
- 4)
- Bias and unintended consequences: Machine learning systems may reproduce hidden biases in training data.
- Develop legal frameworks that define shared accountability for AI failures, ensuring liability coverage for accidents and system malfunctions;
- Use explainable AI (XAI) to generate interpretable justifications for agent decisions, especially in high-stakes or controversial scenarios [149];
- Enforce robust data governance policies to regulate how data are collected, anonymized, and retained;
- Regularly audit AI models for bias and fairness, ensuring compliance with emerging ethical standards.
8.3. Interoperability and Standardization
- 1)
- Lack of universal data formats, communication protocols, or safety standards for AI-driven systems;
- 2)
- Difficulty integrating with legacy vessel systems and port infrastructures;
- 3)
- Inconsistent implementation of IMO and EU guidance across jurisdictions [23].
- Encourage IMO, IALA, EMSA, and industry stakeholders to co-develop reference architectures for maritime autonomy integration.
8.4. Human-Machine Interaction
- 1)
- Non-intuitive or overly technical interfaces impede operator understanding;
- 2)
- Limited operator training in interpreting AI outputs or overriding decisions;
- 3)
- Develop intuitive dashboards that visualize agent behavior, risk levels, and alternative decisions [161];
- Establish clear escalation paths and human override conditions, especially for collision avoidance, distress handling, or cybersecurity breaches;
- Launch AI-specific training programs for seafarers and fleet managers, emphasizing practical decision support and system diagnostics;
- Promote a cooperative culture, where AI agents act as assistants and not replacements, ensuring shared situational awareness and coordinated responses.
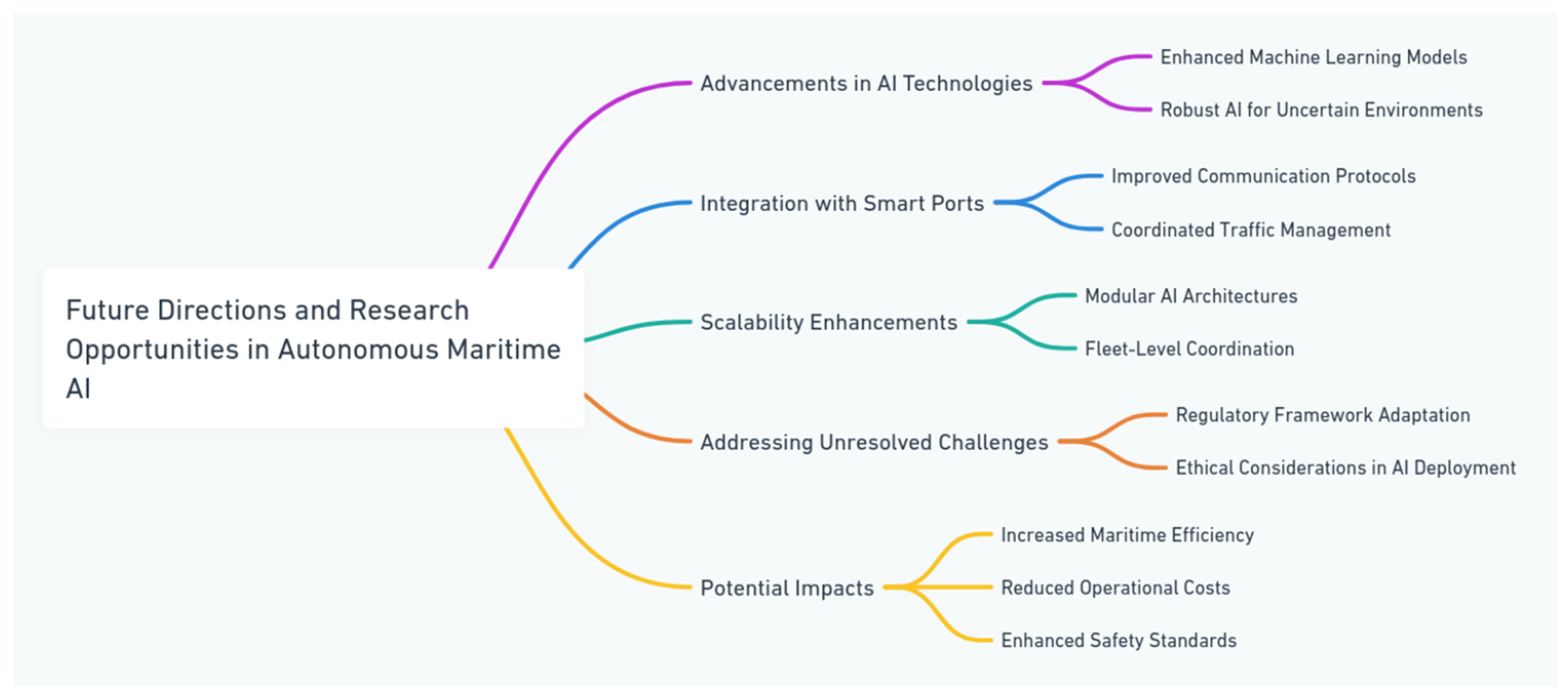
9. Future Directions and Research Opportunities
9.1. Advancements in AI Technologies
9.2. Integration with Smart Port Systems
9.3. Enhancing Scalability and Flexibility
9.4. Addressing Unresolved Challenges
10. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Stark, J. Digital Transformation of Industry: Continuing Change. In Decision Engineering; Springer International Publishing: Cham, Switzerland, 2020. [Google Scholar] [CrossRef]
- Qiao, Y.; Yin, J.; Wang, W.; Duarte, F.; Yang, J.; Ratti, C. Survey of Deep Learning for Autonomous Surface Vehicles in Marine Environments. IEEE Trans. Intell. Transp. Syst. 2023, 24, 3678–3701. [Google Scholar] [CrossRef]
- Petillot, Y.R.; Antonelli, G.; Casalino, G.; Ferreira, F. Underwater Robots: From Remotely Operated Vehicles to Intervention-Autonomous Underwater Vehicles. IEEE Robot. Autom. Mag. 2019, 26, 94–101. [Google Scholar] [CrossRef]
- Bahr, A.; Leonard, J.J.; Fallon, M.F. Cooperative Localization for Autonomous Underwater Vehicles. Int. J. Robot. Res. 2009, 28, 714–728. [Google Scholar] [CrossRef]
- Thieme, C.A.; Utne, I.B. A risk model for autonomous marine systems and operation focusing on human–autonomy collaboration. Proc. Inst. Mech. Eng. Part O J. Risk Reliab. 2017, 231, 446–464. [Google Scholar] [CrossRef]
- Hamrén, R.; Baumgart, S.; Curuklu, B.; Ekström, M. Situation Awareness within Maritime Applications. In Proceedings of the OCEANS 2024—Singapore, Singapore, 15–18 April 2024; pp. 1–8. [Google Scholar] [CrossRef]
- Durlik, I.; Miller, T.; Kostecka, E.; Tuński, T. Artificial Intelligence in Maritime Transportation: A Comprehensive Review of Safety and Risk Management Applications. Appl. Sci. 2024, 14, 8420. [Google Scholar] [CrossRef]
- Costa, P.; Ferdiansyah, J.; Ariessanti, H.D. Integrating Artificial Intelligence for Autonomous Navigation in Robotics. Int. Trans. Artif. Intell. (ITALIC) 2024, 3, 64–75. [Google Scholar] [CrossRef]
- Kyew, A.Y. Opportunities and Challenges in Digitalising Marine Logistics in Indonesia. Collab. Eng. Dly. Book Ser. 2024, 2, 55–61. [Google Scholar] [CrossRef]
- Chang, C.-H.; Kontovas, C.; Yu, Q.; Yang, Z. Risk assessment of the operations of maritime autonomous surface ships. Reliab. Eng. Syst. Saf. 2021, 207, 107324. [Google Scholar] [CrossRef]
- Fruth, M.; Teuteberg, F. Digitization in maritime logistics—What is there and what is missing? Cogent Bus. Manag. 2017, 4, 1411066. [Google Scholar] [CrossRef]
- Kukreja, S.; Besharat, A.; Lee, S.-S. Projective fixed points for non-Fermi liquids: A case study of the Ising-nematic quantum critical metal. Phys. Rev. B 2024, 110, 155142. [Google Scholar] [CrossRef]
- Koo, K.Y.; Rødseth, Ø.J.; Lislebø, G.; Ulvensøen, J.H. Harmonizing Maritime Innovation: Enhancing International and National Standardization in Intelligent Ship Transport Systems. J. Phys. Conf. Ser. 2024, 2867, 012023. [Google Scholar] [CrossRef]
- Al-Falouji, G.; Beyer, T.; Tomforde, S. From Social Robots to Autonomous Surface Vessels’ Navigation. In Proceedings of the 2023 IEEE International Conference on Autonomic Computing and Self-Organizing Systems Companion (ACSOS-C), Toronto, ON, Canada, 25–29 September 2023; pp. 59–64. [Google Scholar] [CrossRef]
- Agarwala, N. The potential of uncrewed and autonomous ships. Aust. J. Marit. Ocean Aff. 2024, 16, 39–58. [Google Scholar] [CrossRef]
- Hoem, Å.S.; Fjortoft, K.; Rødseth, Ø.J. Addressing the Accidental Risks of Maritime Transportation: Could Autonomous Shipping Technology Improve the Statistics? TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2019, 13, 487–494. [Google Scholar] [CrossRef]
- Baihaqie, A.; Susilastuty, D. Implications of Technological Transformation in Maritime Transportation on Optimizing the Blue Economy. In Proceedings of the 4th International Conference on Law, Social Sciences, Economics, and Education, ICLSSEE 2024, Jakarta, Indonesia, 25 May 2024; EAI: Jakarta, Indonesia, 2024. [Google Scholar] [CrossRef]
- Chen, X.; Kamalasudhan, A.; Zhang, X. An application of convolutional neural network to derive vessel movement patterns. In Proceedings of the 2019 5th International Conference on Transportation Information and Safety (ICTIS), Liverpool, UK, 14–17 July 2019; pp. 939–944. [Google Scholar] [CrossRef]
- Andrei, N.; Scarlat, C.; Ioanid, A. Transforming E-Commerce Logistics: Sustainable Practices through Autonomous Maritime and Last-Mile Transportation Solutions. Logistics 2024, 8, 71. [Google Scholar] [CrossRef]
- Peng, Z.; Wang, D.; Li, T.; Han, M. Output-Feedback Cooperative Formation Maneuvering of Autonomous Surface Vehicles with Connectivity Preservation and Collision Avoidance. IEEE Trans. Cybern. 2020, 50, 2527–2535. [Google Scholar] [CrossRef]
- Pedrielli, G.; Xing, Y.; Peh, J.H.; Koh, K.W.; Ng, S.H. A Real Time Simulation Optimization Framework for Vessel Collision Avoidance and the Case of Singapore Strait. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1204–1215. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, C.; Chui, K.T.; Liu, R.W. A Real-Time Collision Avoidance Framework of MASS Based on B-Spline and Optimal Decoupling Control. Sensors 2021, 21, 4911. [Google Scholar] [CrossRef]
- Hu, Y.; Meng, X.; Zhang, Q.; Park, G.-K. A Real-Time Collision Avoidance System for Autonomous Surface Vessel Using Fuzzy Logic. IEEE Access 2020, 8, 108835–108846. [Google Scholar] [CrossRef]
- An, Y.; Zhang, Y.; Guo, H.; Wang, J. Compressive Sensing-Based Three-Dimensional Laser Imaging with Dual Illumination. IEEE Access 2019, 7, 25708–25717. [Google Scholar] [CrossRef]
- Ussyshkin, V.; Theriault, L. Airborne Lidar: Advances in Discrete Return Technology for 3D Vegetation Mapping. Remote Sens. 2011, 3, 416–434. [Google Scholar] [CrossRef]
- Gini, F. Grand Challenges in Radar Signal Processing. Front. Signal Process. 2021, 1, 664232. [Google Scholar] [CrossRef]
- Jang, H.; Yang, W.; Kim, H.; Lee, D.; Kim, Y.; Park, J.; Jeon, M.; Koh, J.; Kang, Y.; Jung, M.; et al. MOANA: Multi-Radar Dataset for Maritime Odometry and Autonomous Navigation Application. arXiv 2024, arXiv:2412.03887. [Google Scholar] [CrossRef]
- Wolsing, K.; Roepert, L.; Bauer, J.; Wehrle, K. Anomaly Detection in Maritime AIS Tracks: A Review of Recent Approaches. J. Mar. Sci. Eng. 2022, 10, 112. [Google Scholar] [CrossRef]
- Stevens, M.; Párraga, C.A.; Cuthill, I.C.; Partridge, J.C.; Troscianko, T.S. Using digital photography to study animal coloration: Using cameras to study animal coloration. Biol. J. Linn. Soc. 2007, 90, 211–237. [Google Scholar] [CrossRef]
- Sharma, S.; Pascuzzo, A.; Uckert, K.; Abbey, W.; Bhartia, R.; Berger, E.; Gómez, F. Multi-instrument Image Correlation for In Situ Planetary Science on Mars 2020. In Proceedings of the 2024 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2024; pp. 1–13. [Google Scholar] [CrossRef]
- Cao, X.; Ren, L.; Sun, C. Research on Obstacle Detection and Avoidance of Autonomous Underwater Vehicle Based on Forward-Looking Sonar. IEEE Trans. Neural Netw. Learn. Syst. 2023, 34, 9198–9208. [Google Scholar] [CrossRef]
- Martin, A.Y. Unmanned Maritime Vehicles: Technology Evolution and Implications. Mar. Technol. Soc. J. 2013, 47, 72–83. [Google Scholar] [CrossRef]
- Alamoush, A.S.; Ölçer, A.I. Maritime Autonomous Surface Ships: Architecture for Autonomous Navigation Systems. J. Mar. Sci. Eng. 2025, 13, 122. [Google Scholar] [CrossRef]
- Mallam, S.C.; Nazir, S.; Sharma, A. The human element in future Maritime Operations—Perceived impact of autonomous shipping. Ergonomics 2020, 63, 334–345. [Google Scholar] [CrossRef]
- Kim, I.; Ko, K.; Park, J. Development of Contextual Collision Risk Framework for Operational Envelope of Autonomous Navigation System. In Proceedings of the 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Abu Dhabi, United Arab Emirates, 14–18 October 2024; pp. 1177–1184. [Google Scholar] [CrossRef]
- Bhalla, J.; Cook, S.C.; Harvey, D.J. Towards a systems framework for the assurance of maritime autonomous systems. Aust. J. Multi-Discip. Eng. 2023, 19, 89–108. [Google Scholar] [CrossRef]
- Mba, J.U. Advancing sustainability and efficiency in maritime operations: Integrating green technologies and autonomous systems in global shipping. Int. J. Sci. Res. Arch. 2024, 13, 2059–2079. [Google Scholar] [CrossRef]
- Tabish, N.; Chaur-Luh, T. Maritime Autonomous Surface Ships: A Review of Cybersecurity Challenges, Countermeasures, and Future Perspectives. IEEE Access 2024, 12, 17114–17136. [Google Scholar] [CrossRef]
- Ferreno-Gonzalez, S.; Diaz-Casas, V.; Miguez-Gonzalez, M.; San-Gabino, C.G. Detection of Pipe Ruptures in Shipboard Firefighting Systems Using Machine Learning and Deep Learning Techniques. Appl. Sci. 2025, 15, 1181. [Google Scholar] [CrossRef]
- Giannopoulos, A.; Gkonis, P.; Bithas, P.; Nomikos, N.; Kalafatelis, A.; Trakadas, P. Federated Learning for Maritime Environments: Use Cases, Experimental Results, and Open Issues. J. Mar. Sci. Eng. 2024, 12, 1034. [Google Scholar] [CrossRef]
- Patel, K.; Bhatt, C.; Mazzeo, P.L. Deep Learning-Based Automatic Detection of Ships: An Experimental Study Using Satellite Images. J. Imaging 2022, 8, 182. [Google Scholar] [CrossRef]
- Zhou, L.; Gao, P.; Zhao, X. Deep Reinforcement Learning Based Path Planning and Collision Avoidance for Smart Ships in Complex Environments. In Proceedings of the 2024 2nd International Conference on Signal Processing and Intelligent Computing (SPIC), Guangzhou, China, 20–22 September 2024; pp. 690–698. [Google Scholar] [CrossRef]
- Yang, Z.; Li, J.; Yang, L.; Wang, Q.; Li, P.; Xia, G. Path planning and collision avoidance methods for distributed multi-robot systems in complex dynamic environments. Math. Biosci. Eng. 2022, 20, 145–178. [Google Scholar] [CrossRef]
- Gambo, F.L.; Haruna, A.S.; Muhammad, U.S.; Abdullahi, A.A.; Ahmed, B.A.; Dabai, U.S. Advances, Challenges and Opportunities in Deep Learning Approach for Object Detection: A Review. In Proceedings of the 2023 2nd International Conference on Multidisciplinary Engineering and Applied Science (ICMEAS), Abuja, Nigeria, 1–3 November 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Ehala, J.; Kaugerand, J.; Pahtma, R.; Astapov, S.; Riid, A.; Tomson, T.; Preden, J.-S.; Mõtus, L. Situation awareness via Internet of things and in-network data processing. Int. J. Distrib. Sens. Netw. 2017, 13, 155014771668657. [Google Scholar] [CrossRef]
- Li, Z. Leveraging AI automated emergency response with natural language processing: Enhancing real-time decision making and communication. Appl. Comput. Eng. 2024, 71, 1–6. [Google Scholar] [CrossRef]
- Jiang, Y. The Applications of Large Language Models in Emergency Management. In Proceedings of the 2024 IEEE 6th Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Chongqing, China, 24–26 May 2024; pp. 199–202. [Google Scholar] [CrossRef]
- Paladin, Z.; Kapidani, N.; Lukšić, Ž.; Mihailović, A.; Scrima, P.; de Naurois, C.J.; Laudy, C.; Rizogiannis, C.; Astyakopoulos, A.; Blum, A. Combined AI Capabilities for Enhancing Maritime Safety in a Common Information Sharing Environment. In Proceedings of the 35 th Bled eConference Digital Restructuring and Human (Re)action, Bled, Slovenia, 26–29 June 2022; pp. 145–160. [Google Scholar] [CrossRef]
- Lee, C.; Lee, S. A Risk Identification Method for Ensuring AI-Integrated System Safety for Remotely Controlled Ships with Onboard Seafarers. J. Mar. Sci. Eng. 2024, 12, 1778. [Google Scholar] [CrossRef]
- Rahadi, S.J.; Prasetyo, D.F.; Hakim, M.L.; Sari, D.P.; Virliani, P.; Rahadi, C.W.; Rina, R.; Yulfani, R.D.; Mohammad, L.; Kurnianingtyas, D. The necessity of implementing AI for enhancing safety in the Indonesian passenger shipping fleet. Kapal 2024, 21, 31–46. [Google Scholar] [CrossRef]
- Narang, G.; Berardini, D.; Pietrini, R.; Tassetti, A.N.; Mancini, A.; Galdelli, A. Edge-AI for Buoy Detection and Mussel Farming: A Comparative Study of YOLO Frameworks. In Proceedings of the 2024 20th IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications (MESA), Genova, Italy, 2–4 September 2024; pp. 1–8. [Google Scholar] [CrossRef]
- Jesawada, A.; Singh, H.; Patel, K.; Kumari, D.; Bhosale, R. AI-Driven Marine Vessel Detection Through Satellite Imagery: A Deep Learning Approach. Int. J. Multidiscip. Res. 2024, 6, 34231. [Google Scholar] [CrossRef]
- Qiao, D.; Liu, G.; Lv, T.; Li, W.; Zhang, J. Marine Vision-Based Situational Awareness Using Discriminative Deep Learning: A Survey. J. Mar. Sci. Eng. 2021, 9, 397. [Google Scholar] [CrossRef]
- Xie, W.; Gang, L.; Zhang, M.; Liu, T.; Lan, Z. Optimizing Multi-Vessel Collision Avoidance Decision Making for Autonomous Surface Vessels: A COLREGs-Compliant Deep Reinforcement Learning Approach. J. Mar. Sci. Eng. 2024, 12, 372. [Google Scholar] [CrossRef]
- Agyei, K.; Sarhadi, P.; Naeem, W. Large Language Model-based Decision-making for COLREGs and the Control of Autonomous Surface Vehicles. arXiv 2024, arXiv:2411.16587. [Google Scholar] [CrossRef]
- Jambol, D.D.; Sofoluwe, O.O.; Ukato, A.; Ochulor, O.J. Transforming equipment management in oil and gas with AI-Driven predictive maintenance. Comput. Sci. IT Res. J. 2024, 5, 1090–1112. [Google Scholar] [CrossRef]
- Nazat, S.; Li, L.; Abdallah, M. XAI-ADS: An Explainable Artificial Intelligence Framework for Enhancing Anomaly Detection in Autonomous Driving Systems. IEEE Access 2024, 12, 48583–48607. [Google Scholar] [CrossRef]
- Dingorkar, S.; Kalshetti, S.; Shah, Y.; Lahane, P. Real-Time Data Processing Architectures for IoT Applications: A Comprehensive Review. In Proceedings of the 2024 First International Conference on Technological Innovations and Advance Computing (TIACOMP), Bali, Indonesia, 29–30 June 2024; pp. 507–513. [Google Scholar] [CrossRef]
- Ibokette, A.I.; Ogundare, T.O.; Danquah, E.O.; Anyebe, A.P.; Agaba, J.A. Optimizing maritime communication networks with virtualization, containerization and IoT to address scalability and real—Time data processing challenges in vessel—To—Shore communication. Glob. J. Eng. Technol. Adv. 2024, 20, 135–174. [Google Scholar] [CrossRef]
- Simion, D.; Postolache, F.; Fleacă, B.; Fleacă, E. AI-Driven Predictive Maintenance in Modern Maritime Transport—Enhancing Operational Efficiency and Reliability. Appl. Sci. 2024, 14, 9439. [Google Scholar] [CrossRef]
- Sampath Kini, K. Exploring Real-Time Data Processing Using Big Data Frameworks. Commun. Appl. Nonlinear Anal. 2024, 31, 620–634. [Google Scholar] [CrossRef]
- Haruna, M.; Gebremeskel, K.G.; Troscia, M.; Tardo, A.; Pagano, P. Mechanisms for Securing Autonomous Shipping Services and Machine Learning Algorithms for Misbehaviour Detection. Telecom 2024, 5, 1031–1050. [Google Scholar] [CrossRef]
- Elnoury, A.; Farag, S. The Impact of Inadequate Maritime Conventions on Implementing Autonomous Ship Technology. AIN J. 2023, 1, 66. [Google Scholar] [CrossRef]
- Čampara, L.; Hasanspahić, N.; Vujičić, S. Overview of MARPOL ANNEX VI regulations for prevention of air pollution from marine diesel engines. SHS Web Conf. 2018, 58, 01004. [Google Scholar] [CrossRef]
- Kim, M.; Joung, T.-H.; Jeong, B.; Park, H.-S. Autonomous shipping and its impact on regulations, technologies, and industries. J. Int. Marit. Saf. Environ. Aff. Shipp. 2020, 4, 17–25. [Google Scholar] [CrossRef]
- Issa, M.; Ilinca, A.; Ibrahim, H.; Rizk, P. Maritime Autonomous Surface Ships: Problems and Challenges Facing the Regulatory Process. Sustainability 2022, 14, 15630. [Google Scholar] [CrossRef]
- Lentarev, A.A. Analysis of the existing regulations on certification and training of autonomous vessels operators. Jour 2023, 15, 359–373. [Google Scholar] [CrossRef]
- Im, I.; Shin, D.; Jeong, J. Components for Smart Autonomous Ship Architecture Based on Intelligent Information Technology. Procedia Comput. Sci. 2018, 134, 91–98. [Google Scholar] [CrossRef]
- Höyhtyä, M.; Martio, J. Integrated Satellite–Terrestrial Connectivity for Autonomous Ships: Survey and Future Research Directions. Remote Sens. 2020, 12, 2507. [Google Scholar] [CrossRef]
- Thombre, S.; Zhao, Z.; Ramm-Schmidt, H.; Garcia, J.M.V.; Malkamaki, T.; Nikolskiy, S.; Hammarberg, T.; Nuortie, H.; Bhuiyan, M.Z.H.; Sarkka, S.; et al. Sensors and AI Techniques for Situational Awareness in Autonomous Ships: A Review. IEEE Trans. Intell. Transp. Syst. 2022, 23, 64–83. [Google Scholar] [CrossRef]
- Zhang, Y. Application of multi-sensor fusion technology. Highlights Sci. Eng. Technol. 2024, 119, 752–757. [Google Scholar] [CrossRef]
- Das, P. Optimizing Sensor Integration for Enhanced Localization in Underwater ROVS. IJSREM 2024, 8, 1–6. [Google Scholar] [CrossRef]
- Bekkadal, F. Emerging maritime communications technologies. In Proceedings of the 2009 9th International Conference on Intelligent Transport Systems Telecommunications, (ITST), Lille, France, 20–22 October 2009; pp. 358–363. [Google Scholar] [CrossRef]
- Robards, M.D.; Silber, G.; Adams, J.; Arroyo, J.; Lorenzini, D.; Schwehr, K.; Amos, J. Conservation science and policy applications of the marine vessel Automatic Identification System (AIS)—A review. Bull. Mar. Sci. 2016, 92, 75–103. [Google Scholar] [CrossRef]
- Riyadh, M. Transforming the Shipping Industry with Autonomous Ships and Artificial Intelligence. J. Marit. Technol. Soc. 2024, 3, 16–21. [Google Scholar] [CrossRef]
- Allal, A.A.; Mansouri, K.; Youssfi, M.; Qbadou, M. Reliable and cost-effective communication at high seas, for a safe operation of autonomous ship. In Proceedings of the 2018 6th International Conference on Wireless Networks and Mobile Communications (WINCOM), Marrakesh, Morocco, 16–19 October 2018; pp. 1–8. [Google Scholar] [CrossRef]
- Martelli, M.; Virdis, A.; Gotta, A.; Cassara, P.; Di Summa, M. An Outlook on the Future Marine Traffic Management System for Autonomous Ships. IEEE Access 2021, 9, 157316–157328. [Google Scholar] [CrossRef]
- Campos, D.F.; Gonçalves, E.P.; Campos, H.J.; Pereira, M.I.; Pinto, A.M. Nautilus: An autonomous surface vehicle with a multilayer software architecture for offshore inspection. J. Field Robot. 2024, 41, 966–990. [Google Scholar] [CrossRef]
- Koznowski, W.; Lebkowski, A. Control of Electric Drive Tugboat Autonomous Formation. TransNav 2023, 17, 391–396. [Google Scholar] [CrossRef]
- Perera, L.P. Autonomous Ship Navigation Under Deep Learning and the Challenges in COLREGs. In Volume 11B: Honoring Symposium for Professor Carlos Guedes Soares on Marine Technology and Ocean Engineering; American Society of Mechanical Engineers: New York, NY, USA, 2018; p. V11BT12A005. [Google Scholar] [CrossRef]
- Zhao, X.; Huang, L.; Zhang, K.; Mou, J.; Yu, D.; He, Y. Dynamic Adaptive Decision-Making Method for Autonomous Navigation of Ships in Coastal Waters. IEEE Trans. Intell. Transp. Syst. 2024, 25, 17917–17930. [Google Scholar] [CrossRef]
- Cherukuri, B.R. Edge Computing vs. Cloud Computing: A Comparative Analysis for Real-Time AI Applications. Int. J. Multidiscip. Res. 2024, 6, 29316. [Google Scholar] [CrossRef]
- Wang, M.; Lee, K.C.M.; Chung, B.M.F.; Bogaraju, S.V.; Ng, H.-C.; Wong, J.S.J.; Shum, H.C.; Tsia, K.K.; So, H.K.-H. Low-Latency In Situ Image Analytics with FPGA-Based Quantized Convolutional Neural Network. IEEE Trans. Neural Netw. Learn. Syst. 2022, 33, 2853–2866. [Google Scholar] [CrossRef]
- Luo, C.; Wu, F.; Xiong, R.; Xu, G.; Liu, W. Edge Computing-Enabled Lightweight Deep Neural Network for Real-Time Video Surveillance in Maritime Cyber-Physical Systems. In Proceedings of the 2024 9th International Conference on Intelligent Computing and Signal Processing (ICSP), Xian, China, 19–21 April 2024; pp. 1342–1350. [Google Scholar] [CrossRef]
- Huang, R.-J.; Tseng, C.-S.; Chen, W.-C.; Tu, T.-P.; Huang, T.-F.; Lin, C.-C.; Chen, P.-H. Implementation of Water Surface Objects Ranging System for Collision Warning. In Proceedings of the 2024 8th International Conference on Robotics and Automation Sciences (ICRAS), Tokyo, Japan, 21–23 June 2024; pp. 95–100. [Google Scholar] [CrossRef]
- Walter, M.J.; Barrett, A.; Walker, D.J.; Tam, K. Adversarial AI Testcases for Maritime Autonomous Systems. AI Comput. Sci. Robot. Technol. 2023, 2. [Google Scholar] [CrossRef]
- Umoh, E.E. Reliability of AI Algorithms in Safety Applications. Int. J. Eng. Adv. Technol. Stud. 2024, 12, 74–85. [Google Scholar] [CrossRef]
- Ringbom, H. Regulating Autonomous Ships—Concepts, Challenges and Precedents. Ocean Dev. Int. Law 2019, 50, 141–169. [Google Scholar] [CrossRef]
- Abođi, A.G.; Živojinović, T.M.; Kaplanović, S.M.; Maraš, V.S. Overview and analysis of regulatory framework for the application of autonomous vessels. Tehnika 2024, 79, 89–96. [Google Scholar] [CrossRef]
- Bakdi, A.; Vanem, E. Fullest COLREGs Evaluation Using Fuzzy Logic for Collaborative Decision-Making Analysis of Autonomous Ships in Complex Situations. IEEE Trans. Intell. Transp. Syst. 2022, 23, 18433–18445. [Google Scholar] [CrossRef]
- Abudu, R.; Bridgelall, R. Autonomous Ships: A Thematic Review. World 2024, 5, 276–292. [Google Scholar] [CrossRef]
- Sengupta, A. Securing the Autonomous Future A Comprehensive Analysis of Security Challenges and Mitigation Strategies for AI Agents. IJSREM 2024, 8, 1–2. [Google Scholar] [CrossRef]
- Familoni, B.T. Cybersecurity challenges in the age of AI: Theoretical approaches and practical solutions. Comput. Sci. IT Res. J. 2024, 5, 703–724. [Google Scholar] [CrossRef]
- Joshva, J.; Diaz, S.; Kumar, S.; Suboyin, A.; AlHammadi, N.; Baobaid, O.; Villasuso, F.; Konig, M.; Binamro, A.; Saputelli, L. Navigating the Future of Maritime Operations: The AI Compass for Ship Management. In Proceedings of the ADIPEC, Abu Dhabi, United Arab Emirates, 4–7 November 2024; Society of Petroleum Engineers: Richardson, Texas, USA, 2024; p. D021S070R005. [Google Scholar] [CrossRef]
- Mørkrid, O.E.; Fjørtoft, K.; Hagaseth, M.; Holte, E. Assessment of resilience in a maritime autonomous transport system. Adv. Hum. Factors Transp. 2024, 148, 697–706. [Google Scholar] [CrossRef]
- Lawless, W. Bidirectional Human-AI/Machine Collaborative and Autonomous Teams: Risk, Trust and Safety. Hum. Factors Robot. Drones Unmanned Syst. 2024, 138, 115–120. [Google Scholar] [CrossRef]
- Yoshioka, H.; Hashimoto, H.; Matsuda, A. Artificial Intelligence for Cooperative Collision Avoidance of Ships Developed by Multi-Agent Deep Reinforcement Learning. In Volume 6: Polar and Arctic Sciences and Technology; CFD, FSI, and AI; American Society of Mechanical Engineers: New York, NY, USA, 2024; p. V006T08A036. [Google Scholar] [CrossRef]
- Saager, M.; Steinmetz, A.; Osterloh, J.-P.; Naumann, A.; Hahn, A. Ensuring Fast Interaction with HMI’s for Safety Critical Systems—An Extension of the Human-Machine Interface Design Method KONECT. Intell. Hum. Syst. Integr. (IHSI 2024) 2024, 119, 193–203. [Google Scholar] [CrossRef]
- Olatunde, T.M.; Okwandu, A.C.; Akande, D.O.; Sikhakhane, Z.Q. Reviewing the role of artificial intelligence in energy efficiency optimization. Eng. Sci. Technol. J. 2024, 5, 1243–1256. [Google Scholar] [CrossRef]
- Schwarz, B.; Zoubir, M.; Heidinger, J.; Gruner, M.; Jetter, H.-C.; Franke, T. Investigating Challenges in Decision Support Systems for Energy-Efficient Ship Operation: A Transdisciplinary Design Research Approach. Hum. Centered Des. User Exp. 2023, 114, 610–625. [Google Scholar] [CrossRef]
- Abuella, M.; Fanaee, H.; Atou, M.A.; Nowaczyk, S.; Johansson, S.; Faghani, E. Data Analytics for Improving Energy Efficiency in Short Sea Shipping. arXiv 2024, arXiv:2404.00902. [Google Scholar] [CrossRef]
- Deng, Z.; Guo, Y.; Han, C.; Ma, W.; Xiong, J.; Wen, S.; Xiang, Y. I Agents Under Threat: A Survey of Key Security Challenges and Future Pathways. arXiv 2024, arXiv:2406.02630. [Google Scholar] [CrossRef]
- Yoo, J.; Jo, Y. Formulating Cybersecurity Requirements for Autonomous Ships Using the SQUARE Methodology. Sensors 2023, 23, 5033. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Zhang, W. An Adaptive Fault-Tolerant Multisensor Navigation Strategy for Automated Vehicles. IEEE Trans. Veh. Technol. 2010, 59, 2815–2829. [Google Scholar] [CrossRef]
- Mansoursamaei, M.; Moradi, M.; González-Ramírez, R.G.; Lalla-Ruiz, E. Machine Learning for Promoting Environmental Sustainability in Ports. J. Adv. Transp. 2023, 2023, 2144733. [Google Scholar] [CrossRef]
- Yan, J.; Zhou, X.; Yang, X.; Shang, Z.; Luo, X.; Guan, X. Joint Design of Channel Estimation and Flocking Control for Multi-AUV-Based Maritime Transportation Systems. IEEE Trans. Intell. Transp. Syst. 2023, 24, 14520–14535. [Google Scholar] [CrossRef]
- Zhou, R.; Gao, Y.; Wang, Y.; Xie, X.; Zhao, X. A Real-Time Scene Parsing Network for Autonomous Maritime Transportation. IEEE Trans. Instrum. Meas. 2023, 72, 1–14. [Google Scholar] [CrossRef]
- Gao, M.; Shi, G.; Li, S. Online Prediction of Ship Behavior with Automatic Identification System Sensor Data Using Bidirectional Long Short-Term Memory Recurrent Neural Network. Sensors 2018, 18, 4211. [Google Scholar] [CrossRef]
- Kot, R.; Szymak, P.; Piskur, P.; Naus, K. A Comparative Study of Different Collision Avoidance Systems with Local Path Planning for Autonomous Underwater Vehicles. IEEE Access 2024, 12, 61443–61466. [Google Scholar] [CrossRef]
- D’Afflisio, E.; Braca, P.; Willett, P. Malicious AIS Spoofing and Abnormal Stealth Deviations: A Comprehensive Statistical Framework for Maritime Anomaly Detection. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 2093–2108. [Google Scholar] [CrossRef]
- Han, X.; Armenakis, C.; Jadidi, M. Dbscan optimization for improving marine trajectory clustering and anomaly detection. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, XLIII-B4-2, 455–461. [Google Scholar] [CrossRef]
- Needhi, J. Advanced Object Detection and Decision Making in Autonomous Medical Response Systems. IJSREM 2024, 08, 1–13. [Google Scholar] [CrossRef]
- Zhang, R.; Li, S.; Ji, G.; Zhao, X.; Li, J.; Pan, M. Survey on Deep Learning-Based Marine Object Detection. J. Adv. Transp. 2021, 2021, 5808206. [Google Scholar] [CrossRef]
- Dutta, P.; Josan, P.K.; Wong, R.K.W.; Dunbar, B.J.; Diaz-Artiles, A.; Selva, D. Effect of Explanations in AI-Assisted Anomaly Treatment for Human Spaceflight Missions. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2022, 66, 697–701. [Google Scholar] [CrossRef]
- Al-Falouji, G.; Beyer, T.; Gao, S.; Tomforde, S. Steering Towards Maritime Safety with True Motion Predictions Ensemble. In Proceedings of the 2024 IEEE International Conference on Autonomic Computing and Self-Organizing Systems Companion (ACSOS-C), Aarhus, Denmark, 16–20 September 2024; pp. 7–12. [Google Scholar] [CrossRef]
- Menges, D.; Von Brandis, A.; Rasheed, A. Digital Twin of Autonomous Surface Vessels for Safe Maritime Navigation Enabled Through Predictive Modeling and Reinforcement Learning. In Volume 5B: Ocean Engineering; American Society of Mechanical Engineers: New York, NY, USA, 2024; p. V05BT06A064. [Google Scholar] [CrossRef]
- Ioannidis, J.; Harper, J.; Quah, M.S.; Hunter, D. Gracenote.ai: Legal Generative AI for Regulatory Compliance. SSRN J. 2023. [Google Scholar] [CrossRef]
- Folorunso, A.; Adewumi, T.; Adewa, A.; Okonkwo, R.; Olawumi, T.N. Impact of AI on cybersecurity and security compliance. Glob. J. Eng. Technol. Adv. 2024, 21, 167–184. [Google Scholar] [CrossRef]
- Efunniyi, C.P.; Abhulimen, A.O.; Obiki-Osafiele, A.N.; Osundare, O.S.; Agu, E.E.; Adeniran, I.A. Strengthening corporate governance and financial compliance: Enhancing accountability and transparency. Financ. Account. Res. J. 2024, 6, 1597–1616. [Google Scholar] [CrossRef]
- Sofoluwe, O.O.; Ochulor, O.J.; Ukato, A.; Jambol, D.D. Promoting high health, safety, and environmental standards during subsea operations. World J. Biol. Pharm. Health Sci. 2024, 18, 192–203. [Google Scholar] [CrossRef]
- Wada, Y.; Yamamura, T.; Hamada, K.; Wanaka, S. Evaluation of GHG Emission Measures Based on Shipping and Shipbuilding Market Forecasting. Sustainability 2021, 13, 2760. [Google Scholar] [CrossRef]
- Hero, M.; Vidmar, P.; Perkovič, M. Reduction of Greenhouse Gas (GHG) Emissions in the Maritime Sector. JMS 2024, 25, 61–72. [Google Scholar] [CrossRef]
- Hamdan, A.; Ibekwe, K.I.; Ilojianya, V.I.; Sonko, S.; Etukudoh, E.A. AI in renewable energy: A review of predictive maintenance and energy optimization. Int. J. Sci. Res. Arch. 2024, 11, 718–729. [Google Scholar] [CrossRef]
- Onwusinkwue, S.; Osasona, F.; Ahmad, I.A.I.; Anyanwu, A.C.; Dawodu, S.O.; Obi, O.C.; Hamdan, A. Artificial intelligence (AI) in renewable energy: A review of predictive maintenance and energy optimization. World J. Adv. Res. Rev. 2024, 21, 2487–2799. [Google Scholar] [CrossRef]
- Vu, V.V.; Le, P.T.; Do, T.M.T.; Nguyen, T.T.H.; Tran, N.B.M.; Paramasivam, P.; Le, T.T.; Le, H.C.; Chau, T.H. An insight into the Application of AI in maritime and Logistics toward Sustainable Transportation. JOIV Int. J. Inform. Vis. 2024, 8, 158–174. [Google Scholar] [CrossRef]
- Audu, A.J.; Umana, A.U. Advances in environmental compliance monitoring in the oil and gas industry: Challenges and opportunities. Int. J. Sci. Res. Updat. 2024, 8, 048–059. [Google Scholar] [CrossRef]
- Norouzi, A.; Shahpouri, S.; Gordon, D.; Winkler, A.; Nuss, E.; Abel, D.; Andert, J.; Shahbakhti, M.; Koch, C.R. Machine Learning Integrated with Model Predictive Control for Imitative Optimal Control of Compression Ignition Engines. IFAC-PapersOnLine 2022, 55, 19–26. [Google Scholar] [CrossRef]
- Ogundare, T.O.; Ibokette, A.I.; Anyebe, A.P.; During, A.D. The Economic and Regulatory Challenges of Implementing Digital Twins and Autonomous Vessels in U.S. Maritime Fleet Modernization. Int. J. Innov. Sci. Res. Technol. (IJISRT) 2024, 5–32. [Google Scholar] [CrossRef]
- Ijaiya, H. Harnessing AI for data privacy: Examining risks, opportunities and strategic future directions. Int. J. Sci. Res. Arch. 2024, 13, 2878–2892. [Google Scholar] [CrossRef]
- Kumari, B. Intelligent Data Governance Frameworks: A Technical Overview. Int. J. Sci. Res. Comput. Sci. Eng. Inf. Technol. 2024, 10, 141–154. [Google Scholar] [CrossRef]
- Garg, V. Modern Data Governance Technologies and Their Role in Regulatory Compliance: A Study on GDPR and HIPAA. Int. Sci. J. Eng. Manag. 2024, 3, 1–6. [Google Scholar] [CrossRef]
- Bakare, S.S.; Adeniyi, A.O.; Akpuokwe, C.U.; Eneh, N.E. Data privacy laws and compliance: A comparative review of the EU GDPR and USA regulations. Comput. Sci. IT Res. J. 2024, 5, 528–543. [Google Scholar] [CrossRef]
- Samonte, M.J.C.; Laurenio, E.N.B.; Lazaro, J.R.M. Enhancing Port and Maritime Cybersecurity Through AI—Enabled Threat Detection and Response. In Proceedings of the 2024 8th International Conference on Smart Grid and Smart Cities (ICSGSC), Shanghai, China, 25–27 October 2024; pp. 412–420. [Google Scholar] [CrossRef]
- Kothandapani, H.P. Automating financial compliance with AI: A New Era in regulatory technology (RegTech). Int. J. Sci. Res. Arch. 2024, 11, 2646–2659. [Google Scholar] [CrossRef]
- Nembe, J.K.; Atadoga, J.O.; Mhlongo, N.Z.; Falaiye, T.; Olubusola, O.; Daraojimba, A.I.; Oguejiofor, B.B. The role of artificial intelligence in enhancing tax compliance and financial regulation. Financ. Account. Res. J. 2024, 6, 241–251. [Google Scholar] [CrossRef]
- Odeyemi, O.; Okoye, C.C.; Ofodile, O.C.; Adeoye, O.B.; Addy, W.A.; Ajayi-Nifise, A.O. Integrating AI with blockchain for enhanced financial services security. Financ. Account. Res. J. 2024, 6, 271–287. [Google Scholar] [CrossRef]
- Vandana, M.; Naveena, M.; Ellaturu, N.; Kumari, T.L.; Bambuwala, S.; Rajalakshmi, M. Ai-Driven Solutions for Supply Chain Management. J. Inform. Educ. Res. 2024, 4, 1526–4726. [Google Scholar] [CrossRef]
- Yuan, P. Optimizing embedded AI systems for autonomous driving: Challenges and solutions using bayesian networks. Appl. Comput. Eng. 2024, 104, 59–64. [Google Scholar] [CrossRef]
- Kim, Y.; Park, J.; Kang, S.; Kim, H. Introducing VaDA: Novel Image Segmentation Model for Maritime Object Segmentation Using New Dataset. arXiv 2024, arXiv:2407.09005. [Google Scholar] [CrossRef]
- Liu, R.W.; Guo, Y.; Nie, J.; Hu, Q.; Xiong, Z.; Yu, H.; Guizani, M. Intelligent Edge-Enabled Efficient Multi-Source Data Fusion for Autonomous Surface Vehicles in Maritime Internet of Things. IEEE Trans. Green Commun. Netw. 2022, 6, 1574–1587. [Google Scholar] [CrossRef]
- Pereira, M.I.; Claro, R.M.; Leite, P.N.; Pinto, A.M. Advancing Autonomous Surface Vehicles: A 3D Perception System for the Recognition and Assessment of Docking-Based Structures. IEEE Access 2021, 9, 53030–53045. [Google Scholar] [CrossRef]
- Rivas, L.; Stevens, S.; Zitter, A.; Khandelwal, V.; Vardhan, A.; Lohani, C.; Rouff, C.; Watkins, L. Assuring Safe Navigation and Network Operations of Autonomous Ships. In Proceedings of the 2024 IEEE 14th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 8–10 January 2024; pp. 0138–0143. [Google Scholar] [CrossRef]
- Dimitrov, T. Applying artificial intelligence for improving situational awareness and threat monitoring at sea as key factor for success in naval operation. In Proceedings of the International Scientific and Practical Conference, Veliko Tarnovo, Bulgaria, 27–28 June 2024; Volume 4, pp. 49–55. [Google Scholar] [CrossRef]
- Tsoukas, V.; Boumpa, E.; Giannakas, G.; Kakarountas, A. A Review of Machine Learning and TinyML in Healthcare. In Proceedings of the 25th Pan-Hellenic Conference on Informatics, Volos, Greece, 26–28 November 2021; ACM: New York, NY, USA, 2021; pp. 69–73. [Google Scholar] [CrossRef]
- Brockmann, S.; Schlippe, T. Optimizing Convolutional Neural Networks for Image Classification on Resource-Constrained Microcontroller Units. Computers 2024, 13, 173. [Google Scholar] [CrossRef]
- Uzougbo, N.S.; Ikegwu, C.G.; Adewusi, A.O. Legal accountability and ethical considerations of AI in financial services. GSC Adv. Res. Rev. 2024, 19, 130–142. [Google Scholar] [CrossRef]
- Chukwunweike, J.; Lawal, O.A.; Arogundade, J.B.; Alad, B. Navigating ethical challenges of explainable ai in autonomous systems. Int. J. Sci. Res. Arch. 2024, 13, 1807–1819. [Google Scholar] [CrossRef]
- Jin, S.; Lee, K. Gap analysis and harmonization of International Standards for Maritime Autonomous Surface Ships. J. Phys. Conf. Ser. 2024, 2867, 012051. [Google Scholar] [CrossRef]
- Sumić, D.; Maleš, L.; Marušić, T.; Rosić, M. Ontology-Based Information Infrastructure for Autonomous Ships. Trans. Marit. Sci. 2024, 13. [Google Scholar] [CrossRef]
- Zhang, P.; Chen, Q.; Macdonald, T.; Lau, Y.-Y.; Tang, Y.-M. Game Change: A Critical Review of Applicable Collision Avoidance Rules between Traditional and Autonomous Ships. J. Mar. Sci. Eng. 2022, 10, 1655. [Google Scholar] [CrossRef]
- Vagale, A.; Osen, O.L.; Brandsæter, A.; Tannum, M.; Hovden, C.; Bye, R.T. On the use of maritime training simulators with humans in the loop for understanding and evaluating algorithms for autonomous vessels. J. Phys. Conf. Ser. 2022, 2311, 012026. [Google Scholar] [CrossRef]
- Hwang, J. Exploring the Impact of AI on Leadership Styles: A Comparative Study of Human-Driven vs. AI-Assisted Decision-Making in High-Stakes Environments. Int. J. Sci. Res. Arch. 2024, 13, 3436–3446. [Google Scholar] [CrossRef]
- Kumar, S.; Bargavi, S. Trust’s Significance in Human-AI Communication and Decision-Making. IJSREM 2024, 8, 1–10. [Google Scholar] [CrossRef]
- Madsen, A.; Brandsæter, A.; Aarset, M.V. Decision Transparency for enhanced human-machine collaboration for autonomous ships. Hum. Factors Robot. Drones Unmanned Syst. 2023, 93, 76–84. [Google Scholar] [CrossRef]
- Zhou, X.; Wu, P.; Zhang, H.; Guo, W.; Liu, Y. Learn to Navigate: Cooperative Path Planning for Unmanned Surface Vehicles Using Deep Reinforcement Learning. IEEE Access 2019, 7, 165262–165278. [Google Scholar] [CrossRef]
- Hu, J.; Kaur, K.; Lin, H.; Wang, X.; Hassan, M.M.; Razzak, I.; Hammoudeh, M. Intelligent Anomaly Detection of Trajectories for IoT Empowered Maritime Transportation Systems. IEEE Trans. Intell. Transp. Syst. 2023, 24, 2382–2391. [Google Scholar] [CrossRef]
- Chen, G.; Huang, Z.; Wang, W.; Yang, S. A Novel Dynamically Adjusted Entropy Algorithm for Collision Avoidance in Autonomous Ships Based on Deep Reinforcement Learning. J. Mar. Sci. Eng. 2024, 12, 1562. [Google Scholar] [CrossRef]
- Creswell, A.; White, T.; Dumoulin, V.; Arulkumaran, K.; Sengupta, B.; Bharath, A.A. Generative Adversarial Networks: An Overview. IEEE Signal Process. Mag. 2018, 35, 53–65. [Google Scholar] [CrossRef]
- Saxena, D.; Cao, J. Generative Adversarial Networks (GANs): Challenges, Solutions, and Future Directions. ACM Comput. Surv. 2022, 54, 1–42. [Google Scholar] [CrossRef]
- Clement, B.; Dubromel, M.; Santos, P.E.; Sammut, K.; Oppert, M.; Dayoub, F. Hybrid Navigation Acceptability and Safety. In Proceedings of the AAAI Symposium Series, Stanford, CA, USA, 7–9 November 2024; Volume 2, pp. 11–17. [Google Scholar] [CrossRef]
- Fera, F.; Spandonidis, C. A Fault Diagnosis Approach Utilizing Artificial Intelligence for Maritime Power Systems within an Integrated Digital Twin Framework. Appl. Sci. 2024, 14, 8107. [Google Scholar] [CrossRef]
- Choi, J.; Qi, J. Regulating Cyber Security of Maritime Autonomous Surface Ship: New Challenges and Improvements. J. East Asia Int. Law 2023, 16, 233–250. [Google Scholar] [CrossRef]
- Costanzi, R.; Fenucci, D.; Manzari, V.; Micheli, M.; Morlando, L.; Terracciano, D.; Caiti, A.; Stifani, M.; Tesei, A. Interoperability Among Unmanned Maritime Vehicles: Review and First In-field Experimentation. Front. Robot. AI 2020, 7, 91. [Google Scholar] [CrossRef]
- Züst, L.; Bruggmann, R.; Gabi, M.; Nieto, J.; Siegwart, R.; Dubé, R. LARS: A Panoptic Dataset for Localization and Autonomous Navigation in Realistic Environments. 2022. Available online: https://lojzezust.github.io/lars-dataset/ (accessed on 22 April 2025).
- Wang, T.; Deng, H.; Zhang, Q.; Liu, Y.; Zheng, Y. WaterScenes: A Multi-Modal Dataset for Unmanned Surface Vehicle (USV) Perception. 2023. Available online: https://github.com/WaterScenes/WaterScenes (accessed on 22 April 2025).
- AISHub. AIS Data Services for Maritime Tracking and Analytics. Available online: https://www.aishub.net/ (accessed on 22 April 2025).
- Bohlender, M.; Moosbauer, S.; Rinner, B.; Qadir, J. SeaDronesSee: A Maritime Dataset for Object Detection and Tracking in Drone Footage. 2021. Available online: https://github.com/Ben93kie/SeaDronesSee (accessed on 22 April 2025).
- ROS Maritime AI Stack Developers. ROS Maritime AI Stack: Open-Source Framework for Autonomous Maritime Robotics. Available online: https://github.com/ros-maritime/awesome-maritime-robotics (accessed on 22 April 2025).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Type | Function | Advantages | Limitations | Common Applications |
|---|---|---|---|---|
| LIDAR [22,23] | 3D mapping and obstacle detection | High-resolution spatial data | Limited range in adverse weather | Navigation, collision avoidance |
| Radar [24,25] | Long-range object detection | Effective in poor visibility conditions | Lower resolution compared to LIDAR | Traffic monitoring, navigation |
| AIS [26] | Vessel identification and tracking | Real-time vessel information | Dependent on other vessels broadcasting | Traffic management, situational awareness |
| Cameras [27,28] | Visual data acquisition and analysis | High-detail imagery for object classification | Susceptible to lighting conditions | Computer vision, environmental monitoring |
| Sonar [29] | Underwater obstacle detection | Effective in murky or dark waters | Limited to underwater applications | Submarine navigation, underwater surveys |
| AI Technique | Description | Use Cases in Maritime Safety | Benefits | Challenges |
|---|---|---|---|---|
| Machine Learning [38] | Algorithms that learn from data | Predictive maintenance, route optimization | Adaptability, improved accuracy | Requires large datasets, overfitting [39] |
| Deep Learning [40] | Neural networks with multiple layers | Computer vision for obstacle detection | High accuracy in pattern recognition | High computational power, interpretability issues [41] |
| Reinforcement Learning [42] | Learning optimal actions through rewards | Dynamic path planning, collision avoidance | Ability to learn complex strategies | Training time, stability of learned policies [42] |
| Computer Vision [43] | Interpretation of visual data | Object detection, environmental monitoring | Real-time processing, detailed analysis | Vulnerable to lighting/weather conditions |
| Sensor Fusion [44] | Integration of data from multiple sensors | Enhanced situational awareness, robust decision-making | Increased data reliability, comprehensive insights | Complexity in data integration, synchronization [45] |
| Natural Language Processing [46] | Understanding and generating human language | Emergency communication, human-machine interfaces | Improved interaction with human operators | Limited by language nuances, context understanding [47] |
| Regulation Name | Governing Body | Key Requirements | Impact on Autonomous Vessels |
|---|---|---|---|
| SOLAS [63] | International Maritime Organization (IMO) | Standards for ship construction, equipment, and operation | Ensures safety features and reliable navigation systems |
| MARPOL [64] | IMO | Prevention of marine pollution | Requires emission control and waste management systems |
| Carbon Intensity Indicator (CII) [65] | IMO | Reduction of CO₂ emissions from ships | Necessitates fuel optimization and emission monitoring by AI |
| EU Intelligent Transport Systems (EU ITS) [66] | European Union | Integration of intelligent technologies in transport | Facilitates communication between autonomous ships and ports |
| STCW [67] | IMO | Standards for training, certification, and watchkeeping | Ensures AI systems support compliance with crew training standards |
| Project/System | Country/Organization | Application Type | AI Capabilities | Key Technical Features |
|---|---|---|---|---|
| Yara Birkeland | Oslo, Norway/Yara International | Fully autonomous container ship | Autonomous navigation, obstacle avoidance | Electric propulsion, integrated sensor fusion system |
| Sea Machines SM300 | Boston, MA, USA/Sea Machines Robotics | Remote and autonomous vessel control | AI-based path following, autonomy via vision | Edge processing, LiDAR, radar, thermal + visual cams |
| NYK Line x Fujitsu AI | Tokyo, Japan/NYK Line and Fujitsu | Predictive navigation and safety | Real-time anomaly detection, collision prediction | Reinforcement learning, historical data models |
| Rolls-Royce Intelligent Awareness | London, UK/Rolls-Royce | Situational awareness | Object recognition, decision support for crew | Sensor fusion (visual + IR + radar), ML vision models |
| Aspect | AI Agents in Maritime | Conventional AI Systems |
|---|---|---|
| Operational Environment [86] | Dynamic, vast, and unpredictable maritime settings | Controlled and predictable environments |
| Decision-Making | Real-time, autonomous navigational and safety decisions | Often batch processing or supervised decision-making |
| Sensor Integration [104] | Diverse maritime-specific sensors (LIDAR, AIS, sonar) | Typically standard sensors for specific applications |
| Latency Requirements | Extremely low latency for immediate response | Varies, generally less stringent latency requirements |
| Safety and Reliability [106] | High emphasis on fail-safes and redundancy | Varies by application, generally lower safety stakes |
| Scalability | Must handle fleet-wide operations and varied vessel types | Often limited to specific use cases or environments |
| Regulatory Compliance | Integrated with maritime regulations for emissions, safety | May not be directly linked to specific regulatory frameworks |
| Human-Machine Interaction [107] | Requires seamless integration with human oversight | Varies, may have limited interaction needs |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Durlik, I.; Miller, T.; Kostecka, E.; Kozlovska, P.; Ślączka, W. Enhancing Safety in Autonomous Maritime Transportation Systems with Real-Time AI Agents. Appl. Sci. 2025, 15, 4986. https://doi.org/10.3390/app15094986
Durlik I, Miller T, Kostecka E, Kozlovska P, Ślączka W. Enhancing Safety in Autonomous Maritime Transportation Systems with Real-Time AI Agents. Applied Sciences. 2025; 15(9):4986. https://doi.org/10.3390/app15094986
Chicago/Turabian StyleDurlik, Irmina, Tymoteusz Miller, Ewelina Kostecka, Polina Kozlovska, and Wojciech Ślączka. 2025. "Enhancing Safety in Autonomous Maritime Transportation Systems with Real-Time AI Agents" Applied Sciences 15, no. 9: 4986. https://doi.org/10.3390/app15094986
APA StyleDurlik, I., Miller, T., Kostecka, E., Kozlovska, P., & Ślączka, W. (2025). Enhancing Safety in Autonomous Maritime Transportation Systems with Real-Time AI Agents. Applied Sciences, 15(9), 4986. https://doi.org/10.3390/app15094986