
Design of Parameter Adaptive Suspension Controllers with Kalman Filter for Ride Comfort Enhancement and Motion Sickness Reduction



Abstract
Featured Application
Abstract
1. Introduction
- Two types of SOFCs are proposed and designed to reduce azc and ωyc over the frequency range from 0.8 to 8.0 Hz. Those SOFCs are optimized with LQOF and validated through simulation on a vehicle simulation package.
- PACs are proposed with two SOF structures and EKF. Differently from LQSOFCs, PAC can adaptively update gains of SOFCs under parameter uncertainties, nonlinearities and external disturbances.
- With LQSOFCs and PACs, the simulation is performed on CarSim. From simulation responses, it is identified which controller can give the best performance in relation to RC and MS.
2. Design of LQ Optimal Controllers
2.1. Half-Car Model and Derivation of State-Space Equation
2.2. Design of LQR
2.3. Design of LQ SOF Controllers
3. Design of Parameter Adaptive Controllers
4. Simulation and Discussion
4.1. Simulation Environment
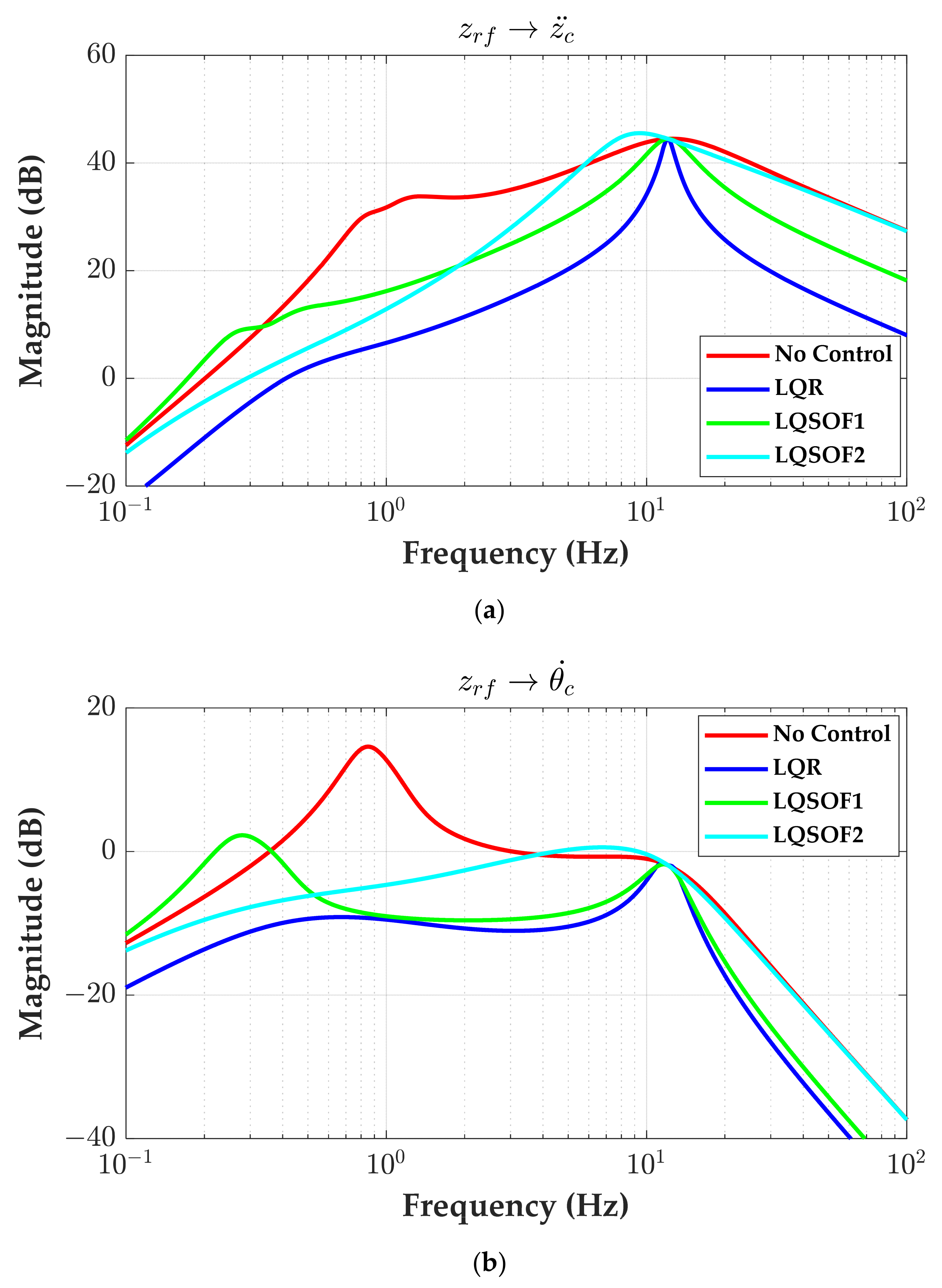
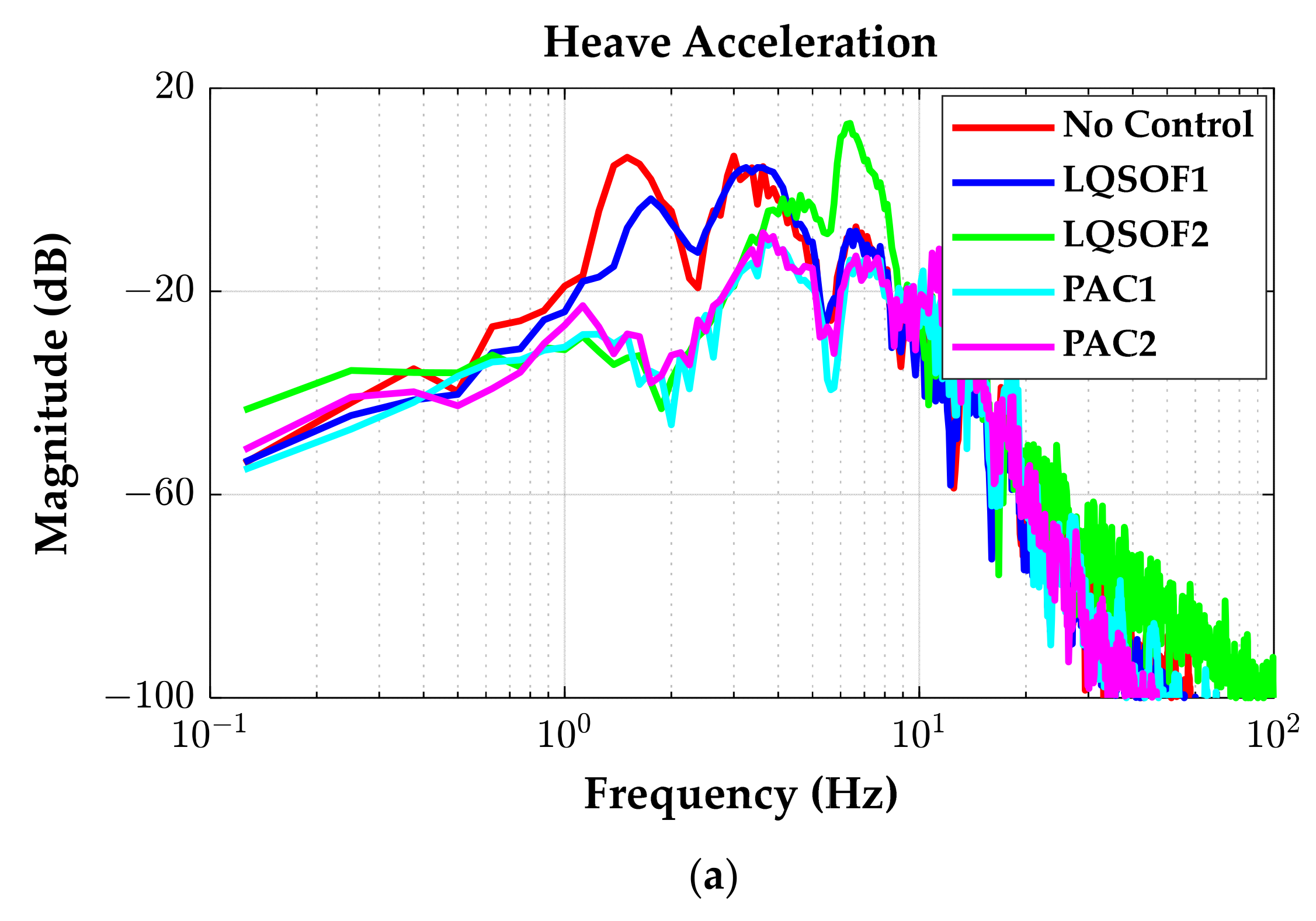
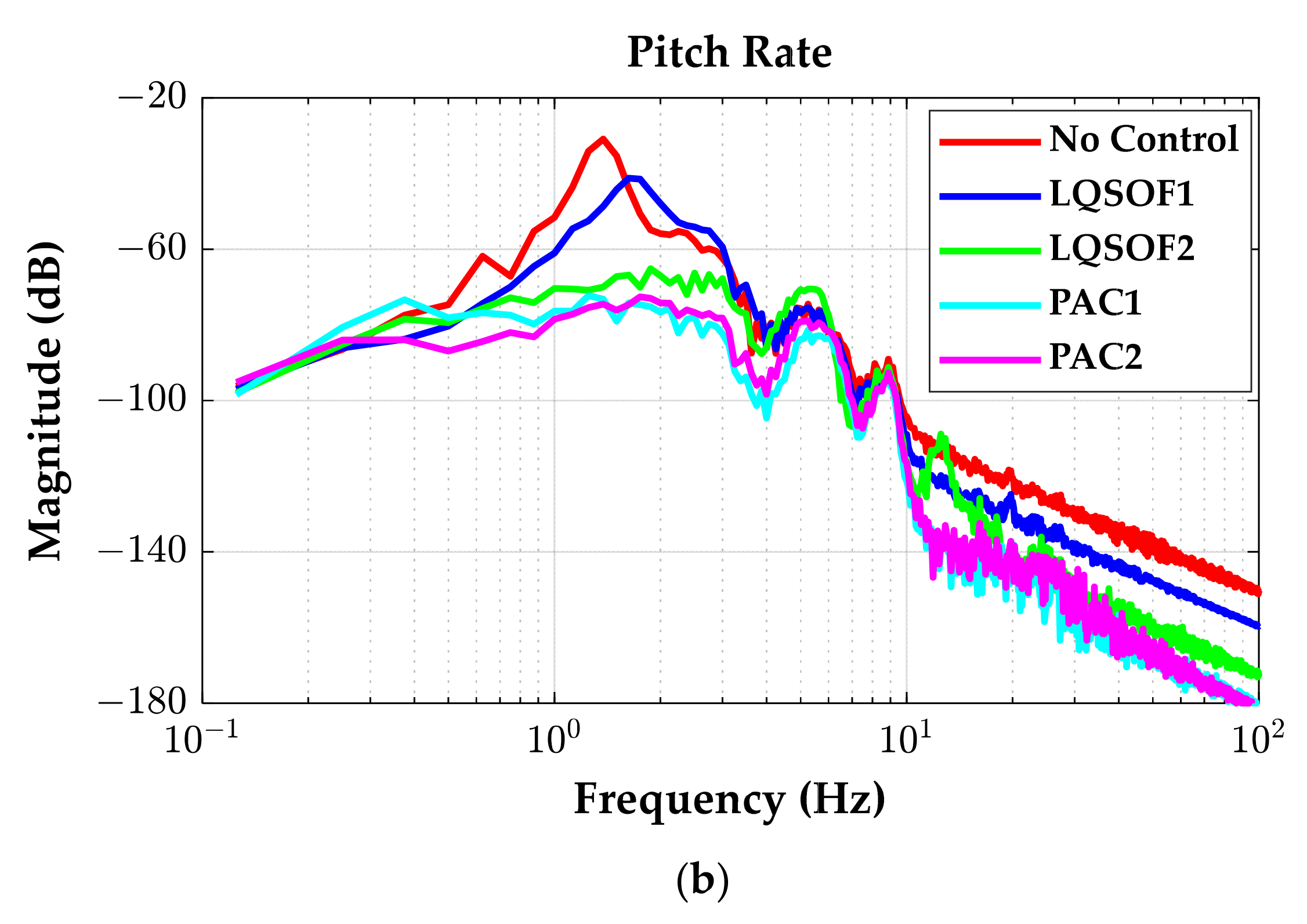
4.2. Frequency Response Analysis with LQ SOF Controllers
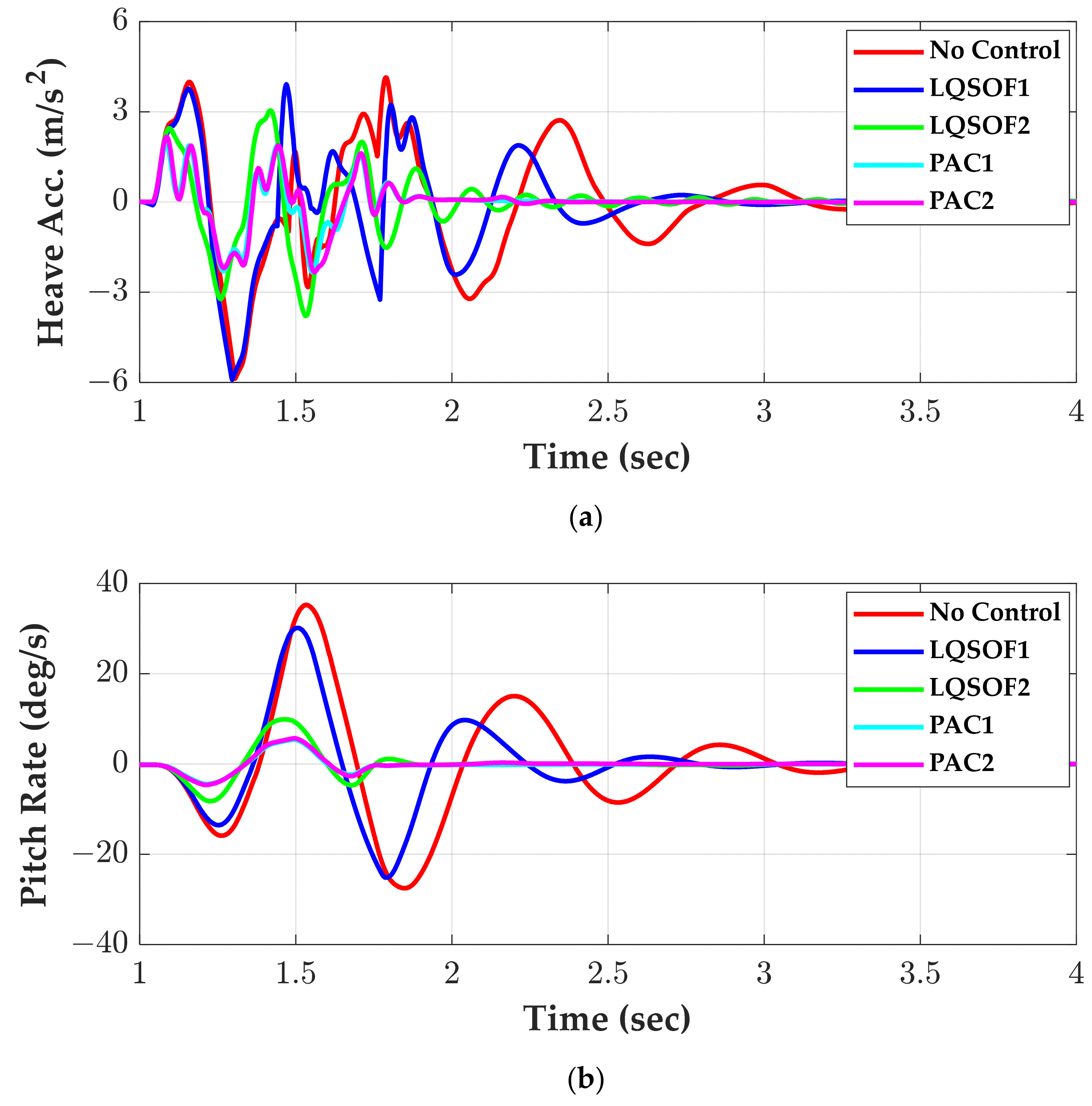
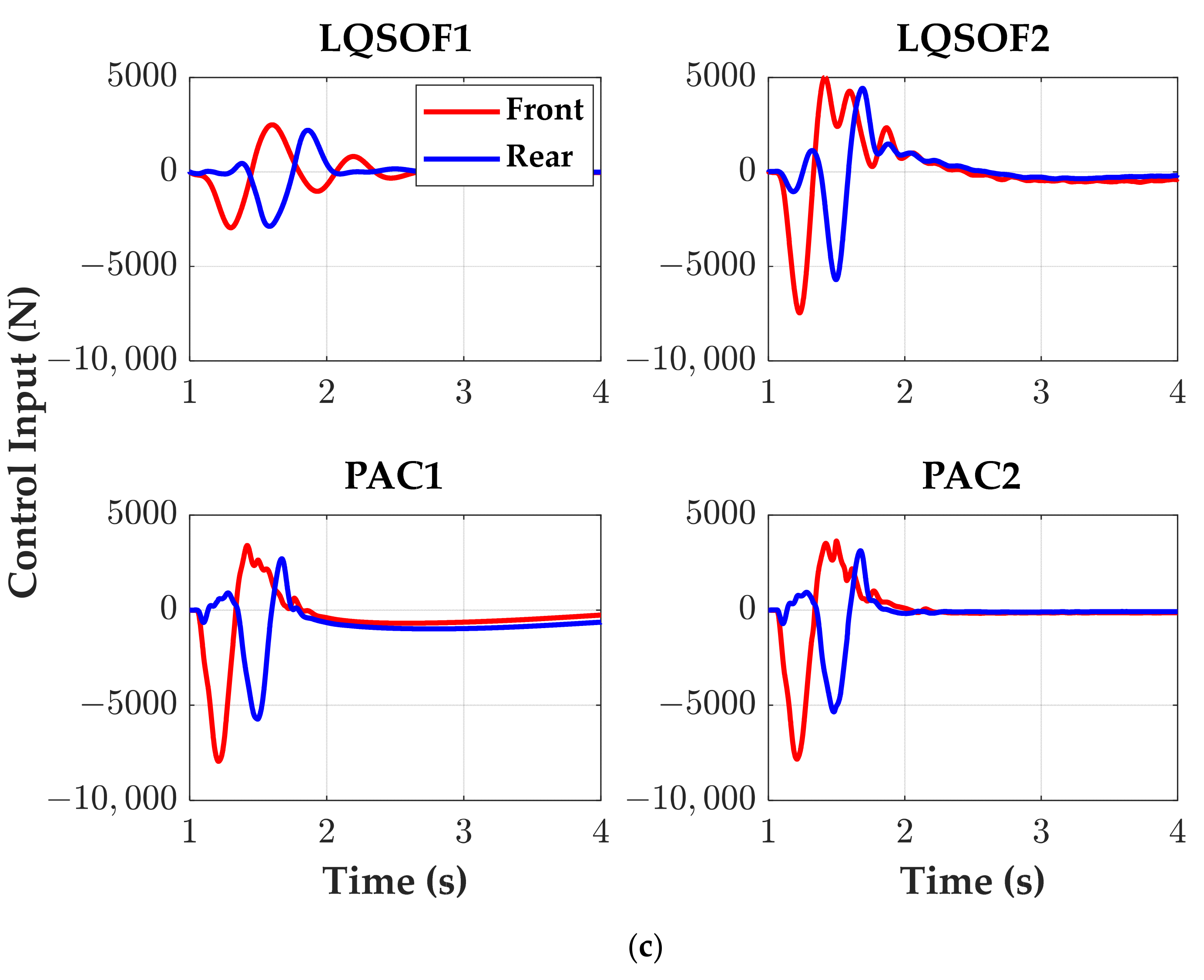
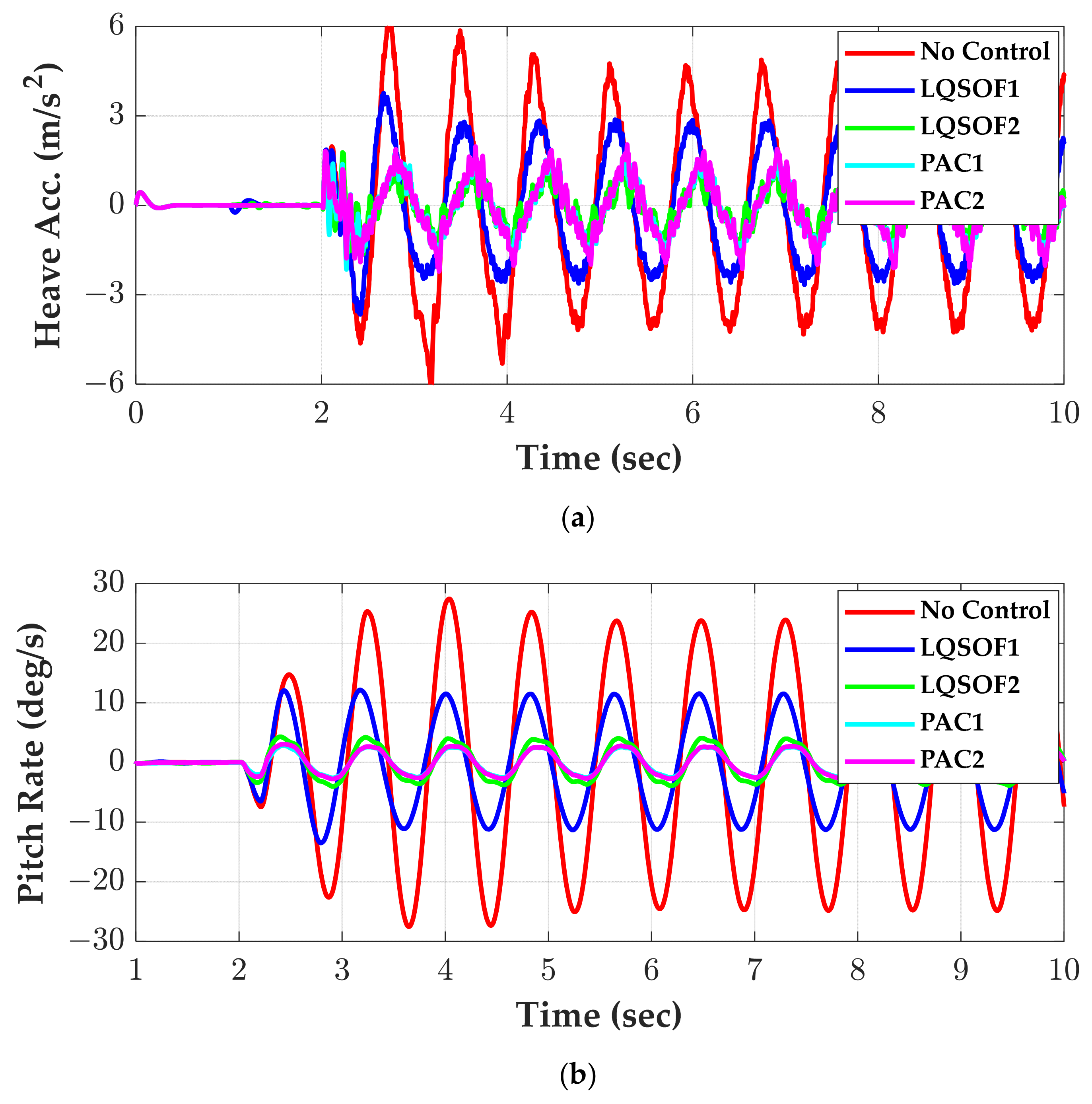
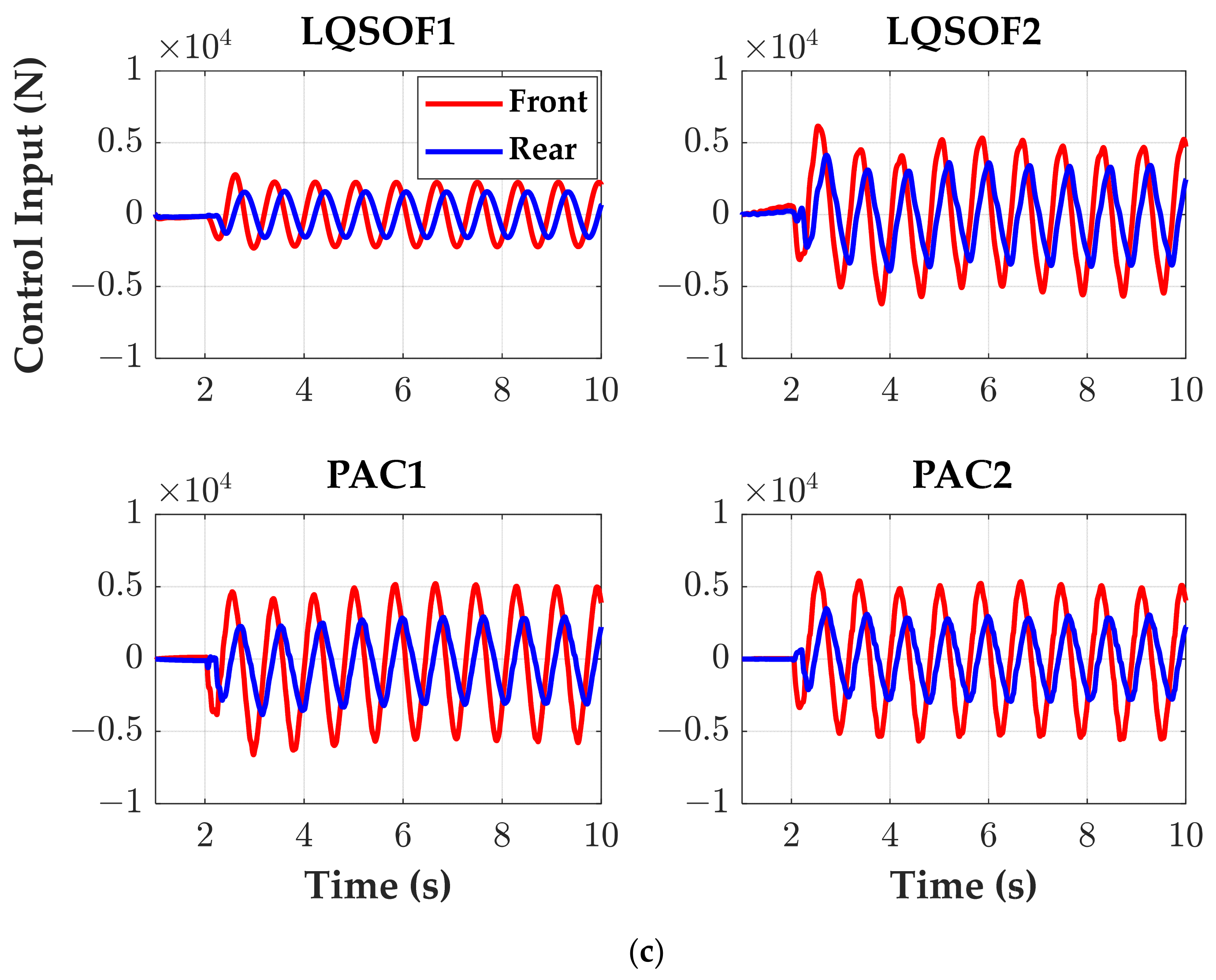
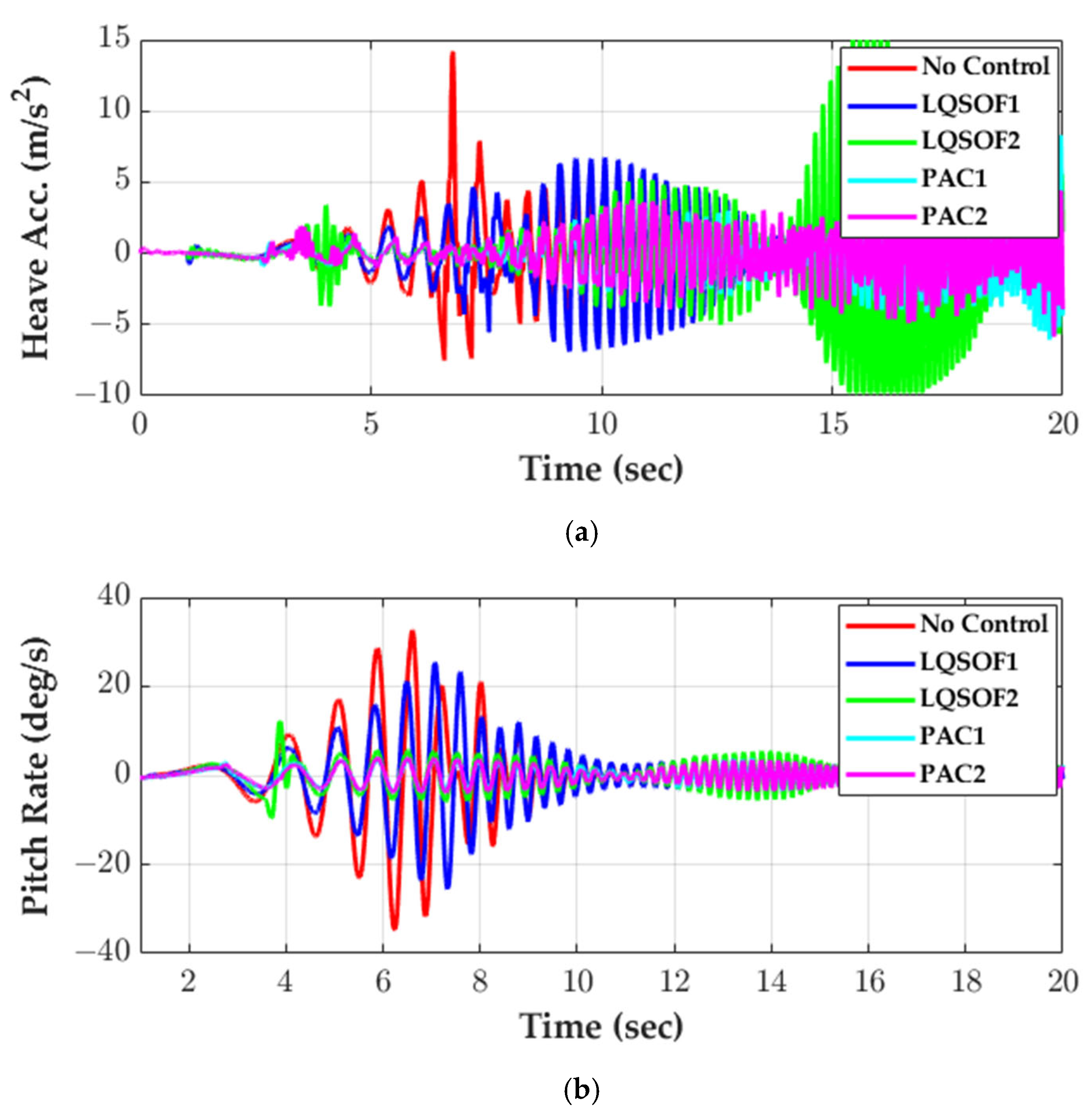
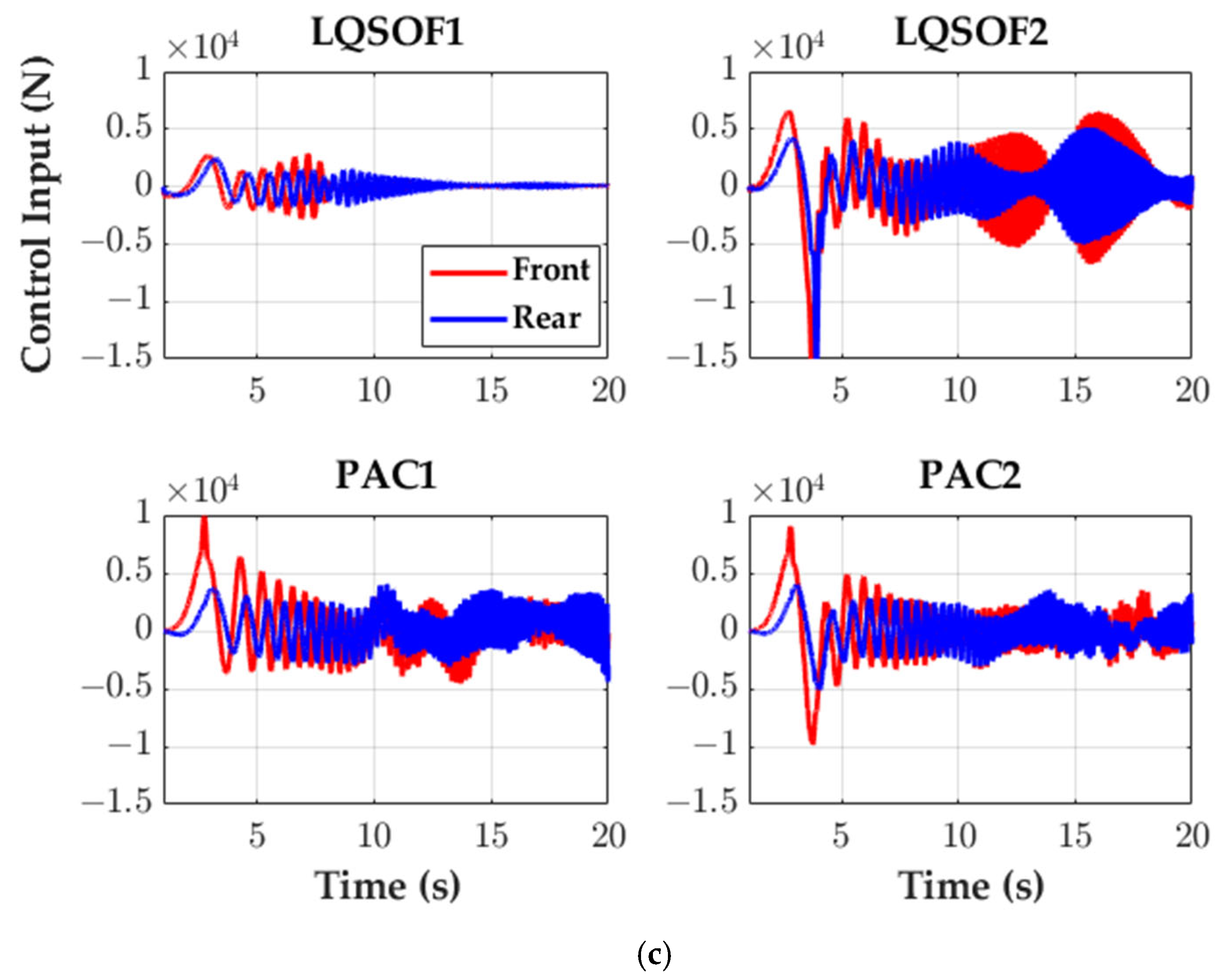
4.3. Simulation with LQ SOF and Parameter Adaptive Conrollers on CarSim
5. Conclusions
- PACs outperform LQSOFCs on three road profiles. PACs show very good performance below 5 Hz with respect to RC and MS, which is the actuator bandwidth. On the other hand, PAC2 is slightly better than PAC1 because the former uses four signals for control and the latter does two signals. For those reasons, PAC2 is recommended due to its simpler structure and smaller number of sensor signals.
- LQSOF1 shows worse performance than LQSOF2 on LHSB and SWR. This results from the suspension displacements and suspension velocities in CarSim are smaller than those in the linear SSEQN. On the contrary, LQSOF2 show better performance because it uses only the vertical velocity and pitch rate of SPMS. Instead, LQSOF2 shows worse performance than the uncontrolled case within the range from 5 to 9 Hz. In a comprehensive way, LQSOFCs are not recommended for ride comfort enhancement and motion sickness mitigation.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| BSSR | bounce sine sweep road |
| DEKF | dual extended Kalman filter |
| EKF | extended Kalman filter |
| FCSPMS | front corner of sprung mass |
| FSF | full-state feedback |
| HCM | half-car model |
| LHSB | large half-sine bump |
| LQOF | linear quadratic objective function |
| LQR | linear quadratic regulator |
| LQSOF | linear quadratic static output feedback |
| LQSOFC | linear quadratic static output feedback controller |
| MAV | maximum allowable value for weights of LQOF |
| MAVHA | maximum absolute value of heave acceleration |
| MAVPR | maximum absolute value of pitch rate |
| MS | motion sickness |
| RC | ride comfort |
| RCSPMS | rear corner of sprung mass |
| SOF | static output feedback |
| SOFC | static output feedback controller |
| SSEQN | state-space equation |
| SPMS | sprung mass |
| SWR | sine waved road |
| USPMS | unsprung mass |
Nomenclature
| lf, lr | distances from center of gravity of a sprung mass to front/rear corners (m) |
| Azsf, Azsr | accelerometers installed on the front and rear corners of the sprung mass |
| Azwf, Azwr | accelerometers installed on the wheel centers of front and rear tires |
| azc | heave acceleration of a sprung mass at C.G. (m/s2) |
| bsf, bsr | damping coefficient of a damper at front/rear suspensions (N·s/m) |
| df, dr | suspension displacements at front/rear suspensions (m) |
| Iy | pitch moment of inertia (kg·m2) |
| ksf, ksr | stiffness of a spring at front/rear suspensions (N/m) |
| ktf, ktr | stiffness of front/rear tires (N/m) |
| L | LQ objective function used for LQR and LQSOFC |
| ms | sprung mass (kg) |
| muf, mur | unsprung mass under front/rear suspensions (kg) |
| uf, ur | forces generated by an actuator at front/rear suspensions (N) |
| vf, vr | suspension velocities at front/rear suspensions (m/s) |
| vzc | vertical velocity of a sprung mass (m/s2) |
| wf, wr | tire deflections of front/rear wheels (m) |
| zc | vertical displacement at center of gravity of a sprung mass (m) |
| zrf, zrr | road elevation acting on front/rear tires (m) |
| zsf, zsr | vertical displacement of front/rear corners of a sprung mass (m) |
| zuf, zur | vertical displacement of front/rear wheel centers (m) |
| ξi | maximum allowable value (MAV) of weight in LQ objective function |
| ωyc | pitch rate of a sprung mass (rad/s) |
| ρi | weight in LQ objective function |
| θc | pitch angle of a sprung mass (rad) |
References
- Hrovat, D. Survey of advanced suspension developments and related optimal control applications. Automatica 1997, 33, 1781–1817. [Google Scholar] [CrossRef]
- Cao, D.; Song, X.; Ahmadian, M. Editors’ perspectives: Road vehicle suspension design, dynamics, and control. Veh. Syst. Dyn. 2011, 49, 3–28. [Google Scholar] [CrossRef]
- Poussot-Vassal, C.; Spelta, C.; Sename, O.; Savaresi, S.M.; Dugard, L. Survey and performance evaluation on some automotive semi-active suspension control methods: A comparative study on a single-corner model. Annu. Rev. Control 2012, 36, 148–160. [Google Scholar] [CrossRef]
- Tseng, H.E.; Hrovat, D. State of the art survey: Active and semi-active suspension control. Veh. Syst. Dyn. 2015, 53, 1034–1062. [Google Scholar] [CrossRef]
- Theunissen, J.; Tota, A.; Gruber, P.; Dhaens, M.; Sorniotti, A. Preview-based techniques for vehicle suspension control: A state-of-the-art review. Annu. Rev. Control 2021, 51, 206–235. [Google Scholar] [CrossRef]
- Tang, Q.; Xiang, H.; Cheng, J.; Xiao, X.; Yu, W.; Zhang, S.; Tang, B.; Ghu, G. Study on evaluation method of motion sickness in electric vehicles. In Proceedings of the 2024 8th CAA International Conference on Vehicular Control and Intelligence, CVCI 2024, Chongqing, China, 25–27 October 2024. [Google Scholar]
- Shi, Z.; He, L.; Wang, M.; Bian, Y.; Cui, S.; Chen, P. Ideal comfort ellipses and comfort dynamics model for mitigating motion sickness in battery electric vehicle. Veh. Syst. Dyn. 2025, OnlineFirst. [Google Scholar] [CrossRef]
- Deng, Z.; Yuan, K.; Xiao, X. Investigative examination of motion sickness indicators for electric vehicles. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2025, OnlineFirst. [Google Scholar] [CrossRef]
- Dam, A.; Jeon, M. A review of motion sickness in automated vehicles. In Proceedings of the AutomotiveUI ‘21: 13th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Leeds, UK, 9–14 September 2021; pp. 39–48. [Google Scholar]
- Asua, E.; Gutiérrez-Zaballa, J.; Mata-Carballeira, O.; Ruiz., J.A.; del Campo, I. Analysis of the motion sickness and the lack of comfort in car passengers. Appl. Sci. 2022, 12, 3717. [Google Scholar] [CrossRef]
- Kirst, L.; Ernst, B.; Kern, A.; Steinhauser, M. The Problem of motion sickness and its implications for automated driving. In User Experience Design in the Era of Automated Driving; Riener, A., Jeon, M., Alvarez, I., Eds.; Studies in Computational Intelligence; Springer: Cham, Switzerland, 2022; Volume 980. [Google Scholar]
- Irmak, T.; Pool, D.M.; de Winkel, K.N.; Happee, R. Validating models of sensory conflict and perception for motion sickness prediction. Biol. Cybern. 2023, 117, 185–209. [Google Scholar] [CrossRef]
- Pereira, E.; Macedo, H.; Lisboa, I.C.; Sousa, E.; Machado, D.; Silva, E.; Coelho, V.; Arezes, P.; Costa, N. Motion sickness countermeasures for autonomous driving: Trends and future directions. Transp. Eng. 2024, 15, 100220. [Google Scholar] [CrossRef]
- Xie, W.; He, D.; Wu, G. Inducers of motion sickness in vehicles: A systematic review of experimental evidence and meta-analysis. Transp. Res. Part F Traffic Psychol. Behav. 2023, 99, 167–188. [Google Scholar] [CrossRef]
- Diels, C.; Ye, Y.; Bos, J.; Maeda, S. Motion sickness in automated vehicles: Principal research questions and the need for common protocols. SAE Int. J. Connect. Autom. Veh. 2022, 5, 121–134. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhao, H.; Hu, C.; Tian, Y.; Li, Y.; Jiao, X. Mitigation of motion sickness and optimization of motion comfort in autonomous vehicles: Systematic survey. IEEE Trans. Intell. Trans. Sys. 2024, 25, 21737–21756. [Google Scholar] [CrossRef]
- Jeong, Y.; Yim, S. Design of active suspension controller for ride comfort enhancement and motion sickness mitigation. Machines 2024, 12, 254. [Google Scholar] [CrossRef]
- Kim, J.; Yim, S. Design of static output feedback suspension controllers for ride comfort improvement and motion sickness reduction. Processes 2024, 12, 968. [Google Scholar] [CrossRef]
- Kim, J.; Yim, S. Design of a suspension controller with an adaptive feedforward algorithm for ride comfort enhancement and motion sickness mitigation. Actuators 2024, 13, 315. [Google Scholar] [CrossRef]
- Kim, J.; Yim, S. Design of a suspension controller with human body model for ride comfort improvement and motion sickness mitigation. Actuators 2024, 13, 520. [Google Scholar] [CrossRef]
- Oh, H.E.; Park, D.J.; Park, J.P.; Ahn, S.J.; Jeong, W.B. Digital filter design of frequency weighting function to measure and assess human vibration. Noise Control Eng. J. 2017, 65, 183–190. [Google Scholar] [CrossRef]
- Medina Santiago, A.; Orozco Torres, J.A.; Hernández Gracidas, C.A.; Garduza, S.H.; Franco, J.D. Diagnosis and study of mechanical vibrations in cargo vehicles using ISO 2631-1:1997. Sensors 2023, 23, 9677. [Google Scholar] [CrossRef]
- Ekchian, J.; Graves, W.; Anderson, Z.; Giovanardi, M.; Godwin, O.; Kaplan, J.; Ventura, J.; Lackner, J.R.; DiZio, P. A High-Bandwidth Active Suspension for Motion Sickness Mitigation in Autonomous Vehicles. In Proceedings of the SAE 2016 World Congress and Exhibition, Detroit, MI, USA, 13 April 2016; SAE Technical Paper 2016-01-1555. SAE International: Warrendale, PA, USA, 2016. [Google Scholar]
- DiZio, P.; Ekchian, J.; Kaplan, J.; Ventura, J.; Graves, W.; Giovanardi, M.; Anderson, Z.; Lackner, J.R. An active suspension system for mitigating motion sickness and enabling reading in a car. Aerosp. Med. Hum. Perform. 2018, 89, 822–829. [Google Scholar] [CrossRef]
- Camino, J.F.; Zampieri, D.E.; Peres, P.L.D. Design of a vehicular suspension controller by static output feedback. In Proceedings of the American Control Conference, San Diego, CA, USA, 2–4 June 1999; pp. 3168–3171. [Google Scholar]
- Zhao, J.; Wang, X.; Wong, P.K.; Xie, Z.; Jia, J.; Li, W. Multi-objective frequency domain-constrained static output feedback control for delayed active suspension systems with wheelbase preview information. Nonlinear Dyn. 2021, 103, 1757–1774. [Google Scholar] [CrossRef]
- Mrazgua, J.; Chaibi, R.; Tissir, E.H.; Ouahi, M. Static output feedback stabilization of T-S fuzzy active suspension systems. J. Terramechanics 2021, 97, 19–27. [Google Scholar] [CrossRef]
- Behrouz, H.; Mohammadzaman, I.; Mohammadi, A. Robust static output feedback H2/H∞ control synthesis with pole placement constraints: An LMI approach. Int. J. Control Autom. Syst. 2021, 19, 241–254. [Google Scholar] [CrossRef]
- Park, M.; Yim, S. Design of static output feedback and structured controllers for active suspension with quarter-car model. Energies 2021, 14, 8231. [Google Scholar] [CrossRef]
- Jeong, Y.; Shon, Y.; Chang, S.; Yim, S. Design of static output feedback controllers for an active suspension system. IEEE Access 2022, 10, 26948–26964. [Google Scholar] [CrossRef]
- Elias, L.J.; Faria, F.A.; Araujo, R.; Magossi, R.F.Q.; Oliveira, V.A. Robust static output feedback H∞ control for uncertain Takagi–Sugeno fuzzy systems. IEEE Trans. Fuzzy Syst. 2022, 30, 4434–4446. [Google Scholar] [CrossRef]
- Hansen, N.; Muller, S.D.; Koumoutsakos, P. Reducing the time complexity of the derandomized evolution strategy with covariance matrix adaptation (CMA-ES). Evol. Comput. 2003, 11, 1–18. [Google Scholar] [CrossRef]
- Hansen, N. The CMA evolution strategy: A comparing review. In Towards a New Evolutionary Computation. Advances in Estimation of Distribution Algorithms; Lozano, J.A., Larrañga, P., Inza, I., Bengoetxea, E., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 75–102. [Google Scholar]
- Pan, H.; Sun, W.; Jing, X.; Gao, H.; Yao, J. Adaptive tracking control for active suspension systems with non-ideal actuators. J. Sound Vib. 2017, 399, 2–20. [Google Scholar] [CrossRef]
- Huang, Y.; Na, J.; Wu, X.; Gao, G.; Guo, Y. Robust adaptive control for vehicle active suspension systems with uncertain dynamics. Trans. Inst. Meas. Control. 2018, 40, 1237–1249. [Google Scholar] [CrossRef]
- Mozaffari, A.; Chenouri, S.; Qin, Y.; Khajepour, A. Learning-based vehicle suspension controller design: A review of the state-of-the-art and future research potentials. eTransportation 2019, 2, 100024. [Google Scholar] [CrossRef]
- Liu, Y.; Zhang, Y.; Liu, L.; Tong, S.; Chen, C.L.P. Adaptive finite-time control for half-vehicle active suspension systems with uncertain dynamics. IEEE/ASME Trans. Mechatron. 2021, 26, 168–178. [Google Scholar]
- Yim, S. Comparative study on active suspension controllers with parameter adaptive and static output feedback control. Actuators 2025, 14, 150. [Google Scholar] [CrossRef]
- Haykin, S. Adaptive Filter Theory, 2nd ed.; Prentice-Hall: Hoboken, NJ, USA, 1991; pp. 760–761. [Google Scholar]
- Wan, E.A.; Nelson, A.T. Dual extended Kalman filter methods. In Kalman Filtering and Neural Networks; Haykin, S., Ed.; JohnWiley & Sons: NewYork, NY, USA, 2001; Chapter 5. [Google Scholar]
- Wenzel, T.A.; Burnham, K.J.; Blundell, M.V.; Williams, R.A. Dual extended Kalman filter for vehicle state and parameter estimation. Veh. Syst. Dyn. 2006, 44, 153–171. [Google Scholar] [CrossRef]
- Zhang, F.; Wang, Y.; Hu, J.; Yin, G.; Chen, S.; Zhang, H.; Zhou, D. A novel comprehensive scheme for vehicle state estimation using dual extended H-Infinity Kalman filter. Electronics 2021, 10, 1526. [Google Scholar] [CrossRef]
- Wu, M.; Qin, L.; Wu, G. State of charge estimation of power lithium-ion battery based on an adaptive time scale dual extend Kalman filtering. J. Energy Storage 2021, 39, 102535. [Google Scholar]
- Ok, M.; Ok, S.; Park, J.H. Estimation of vehicle attitude, acceleration, and angular velocity using convolutional neural network and dual extended Kalman filter. Sensors 2021, 21, 1282. [Google Scholar] [CrossRef]
- Wei, W.; Dourra, H.; Zhu, G. Vehicle tire traction torque estimation using a dual extended Kalman filter. J. Dyn. Sys. Meas. Control 2022, 144, 031004. [Google Scholar] [CrossRef]
- Bryson, A.E., Jr.; Ho, Y. Applied Optimal Control; Hemisphere: New York, NY, USA, 1975. [Google Scholar]
- Sadabadia, M.S.; Peaucelleb, D. From static output feedback to structured robust static output feedback: A survey. Annu. Rev. Control. 2016, 42, 11–26. [Google Scholar] [CrossRef]
- Khan, M.; Sun, H.; Xiang, Y.; Shi, D. Electric vehicles participation in load frequency control based on mixed H2/H∞. Int. J. Electr. Power Energy Syst. 2021, 125, 106420. [Google Scholar]
- Rodrigues, L. From LQR to static output feedback: A new LMI approach. In Proceedings of the 2022 IEEE 61st Conference on Decision and Control (CDC), Cancun, Mexico, 6–9 December 2022. [Google Scholar]
- Yang, Y.; Liu, C.; Chen, L.; Zhang, X. Phase deviation of semi-active suspension control and its compensation with inertial suspension. Acta Mech. Sin. 2024, 40, 523367. [Google Scholar] [CrossRef]
- Liu, S.; Zhang, L.; Liu, Y.; Wang, J.; Yang, C.; Zhang, J. Motion posture control of corner module architecture intelligent electric vehicle on deep-potholed roads. IEEE/ASME Trans. Mechatron. 2024, 29, 4480–4491. [Google Scholar] [CrossRef]
- Liu, S.; Zhang, L.; Chen, M.; Yang, C.; Zhang, J.; Wang, J. Multiple suspensions coordinated control for corner module architecture intelligent electric vehicles on stepped roads. IEEE Trans. Intell. Veh. 2025, EarlyAccess. [Google Scholar] [CrossRef]
- Mechanical Simulation Corporation. CarSim Data Manual, 8th ed.; Mechanical Simulation Corporation: Ann Arbor, MI, USA, 2009. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MAV | Values | MAV | Values | MAV | Values |
|---|---|---|---|---|---|
| ξ1 | 0.1 m/s2 | ξ2 | 30.0 deg/s2 | ξ3 | 1.0 deg/s |
| ξ4 | 5.0 deg | ξ5 | 0.2 m | ξ6 | 0.2 m |
| ξ7 | 20,000.0 N |
| Controller | Max |azc| (m/s2) | Max |ωyc| (deg/s) |
|---|---|---|
| No Control | 5.9 | 35.2 |
| LQSOF1 | 5.9 (0%) | 30.2 (14%) |
| LQSOF2 | 3.8 (36%) | 9.9 (72%) |
| PAC1 | 2.3 (61%) | 5.4 (85%) |
| PAC2 | 2.3 (61%) | 5.7 (84%) |
| Controller | Max |azc| (m/s2) | Max |ωyc| (deg/s) |
|---|---|---|
| No Control | 4.9 | 25.0 |
| LQSOF1 | 3.0 (39%) | 11.6 (54%) |
| LQSOF2 | 1.5 (69%) | 4.1 (84%) |
| PAC1 | 1.8 (63%) | 2.6 (90%) |
| PAC2 | 2.1 (57%) | 2.8 (89%) |
| Controller | Max |azc| (m/s2) | Max |ωyc| (deg/s) |
|---|---|---|
| No Control | 14.2 | 34.8 |
| LQSOF1 | 3.5 (75%) | 23.5 (33%) |
| LQSOF2 | 3.7 (74%) | 12.3 (65%) |
| PAC1 | 0.9 (94%) | 3.6 (90%) |
| PAC2 | 1.9 (87%) | 4.0 (89%) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, J.; Yim, S. Design of Parameter Adaptive Suspension Controllers with Kalman Filter for Ride Comfort Enhancement and Motion Sickness Reduction. Appl. Sci. 2025, 15, 4977. https://doi.org/10.3390/app15094977
Kim J, Yim S. Design of Parameter Adaptive Suspension Controllers with Kalman Filter for Ride Comfort Enhancement and Motion Sickness Reduction. Applied Sciences. 2025; 15(9):4977. https://doi.org/10.3390/app15094977
Chicago/Turabian StyleKim, Jinwoo, and Seongjin Yim. 2025. "Design of Parameter Adaptive Suspension Controllers with Kalman Filter for Ride Comfort Enhancement and Motion Sickness Reduction" Applied Sciences 15, no. 9: 4977. https://doi.org/10.3390/app15094977
APA StyleKim, J., & Yim, S. (2025). Design of Parameter Adaptive Suspension Controllers with Kalman Filter for Ride Comfort Enhancement and Motion Sickness Reduction. Applied Sciences, 15(9), 4977. https://doi.org/10.3390/app15094977