Rate of Penetration Estimation with Parameter Correction


Abstract
1. Introduction
1.1. Depth Corrections
1.2. ROP Estimation
1.3. Motivation, Novelty, and Contribution
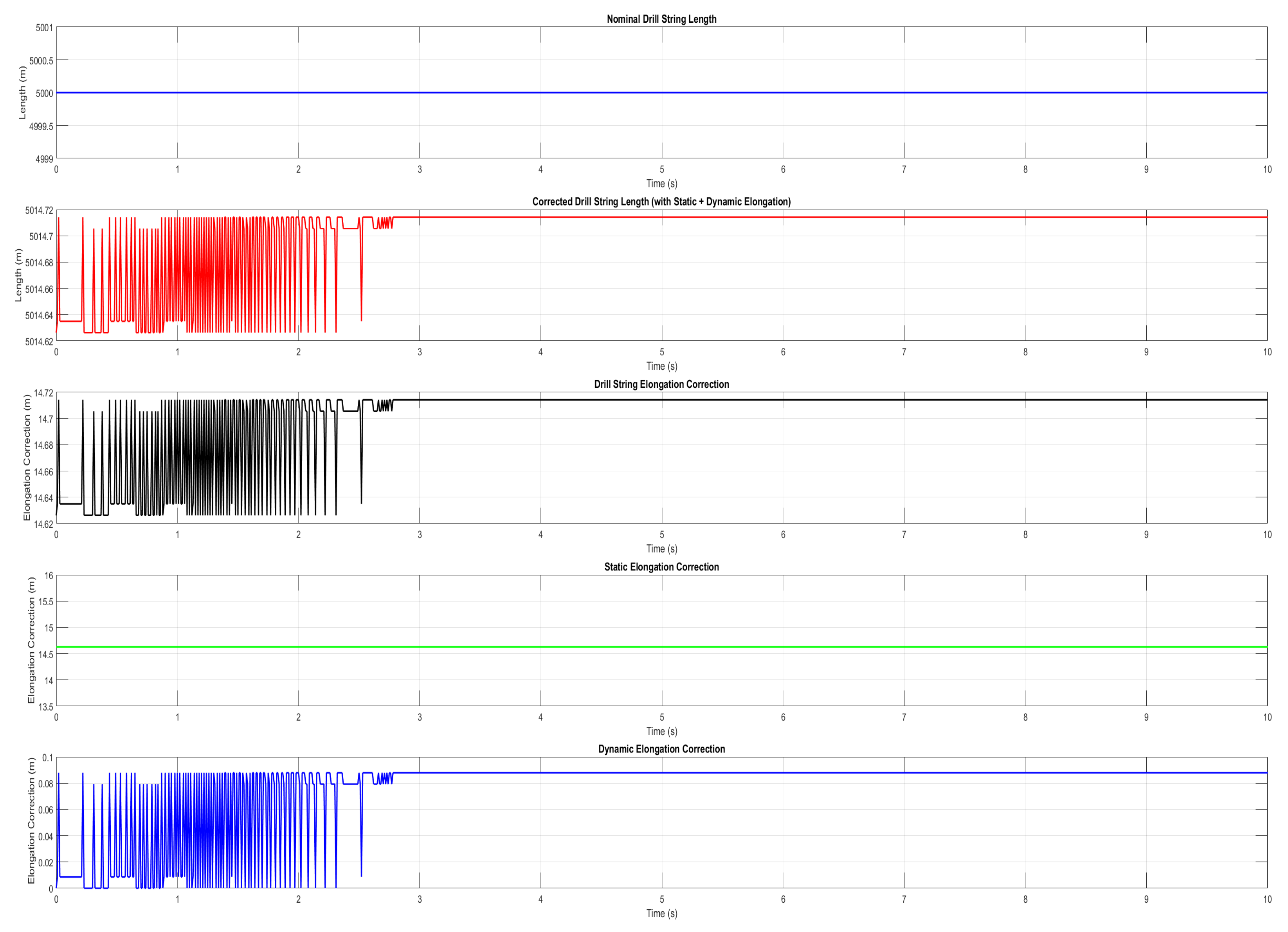
- Integration of static and dynamic elongation: The proposed model separates and accounts for both static elongation (due to tension, pressure ballooning, thermal expansion, and friction drag) and dynamic elongation (induced by vibration, bit–rock interaction, and transient axial loads). This dual-component correction enables a more accurate determination of the bit’s true position in the formation—critical for high-resolution control and monitoring in deviated or deep wells.
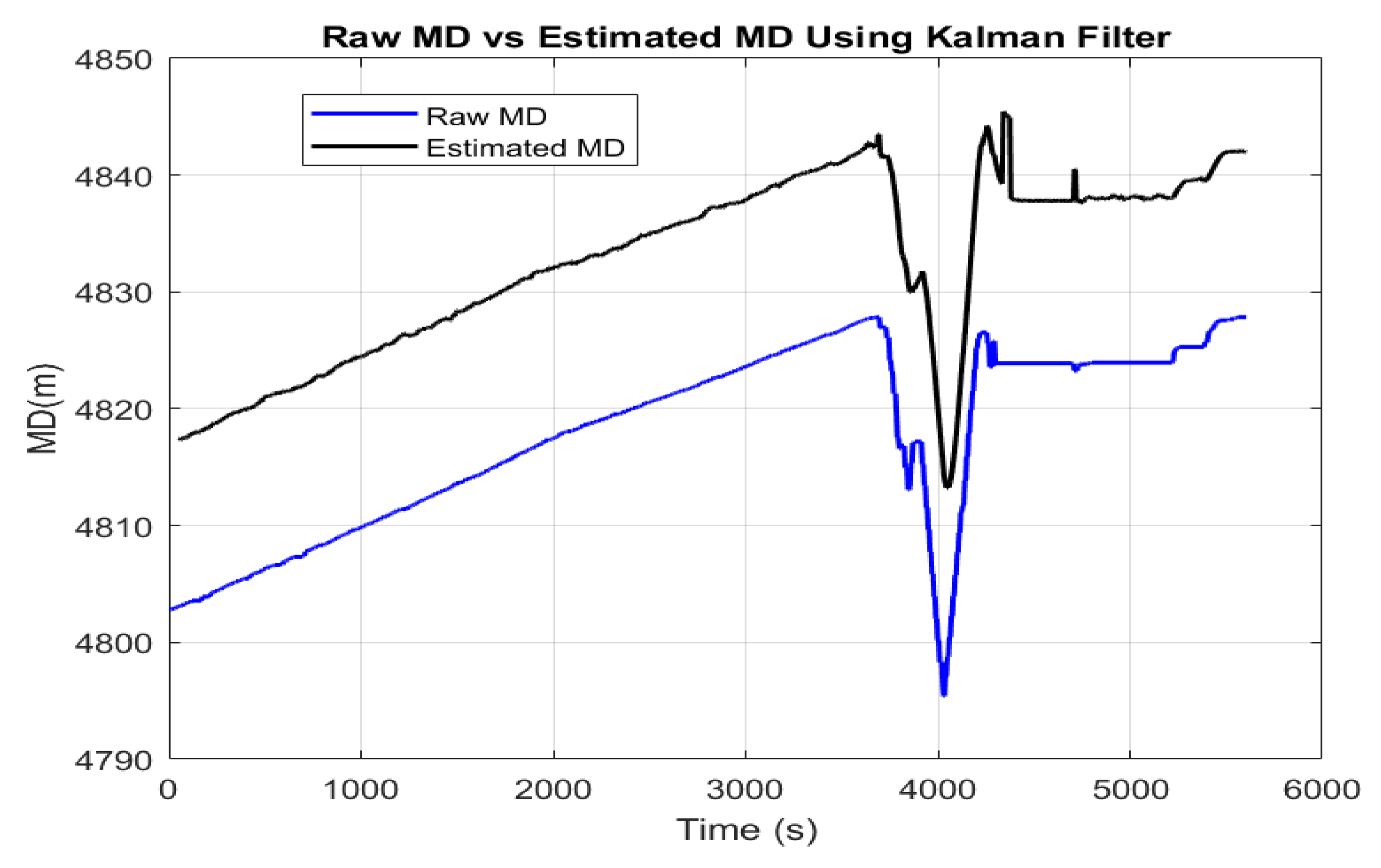
- Kalman filter-based ROP estimation: A state-space model incorporating ROP, bit penetration, and dynamic elongation is formulated, and a Kalman filter is employed to iteratively estimate these variables in real time. This method not only filters out sensor noise and measurement drift but also improves robustness against modeling uncertainties, providing smoother and more reliable ROP estimates than traditional time-differentiation methods.
2. Well Depth Correction
2.1. Downhole Forces
- If , meaning the calculated hook load is greater than the measured value, the algorithm increases WOB by a predetermined step size to reduce the error.
- If , meaning the calculated hook load is lower than the measured value, WOB is decreased to bring the computed values closer to the measured ones.
2.2. Static Elongation
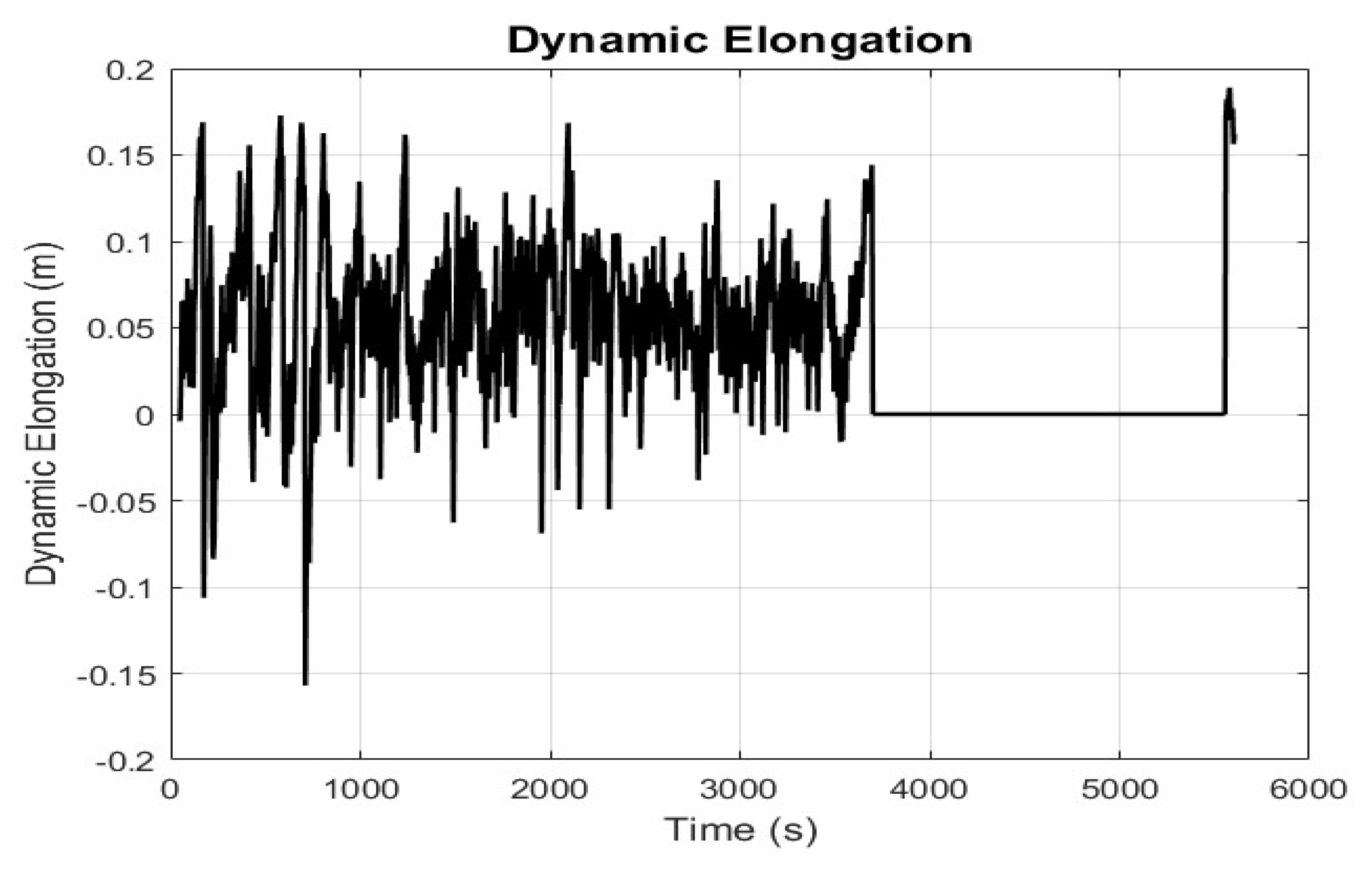
2.3. Dynamic Elongation
2.3.1. Drill String Dynamic Model
2.3.2. Dynamic Elongation Calculation
2.4. Well Depth Calculation
3. ROP Calculation
4. ROP Estimation with Models
4.1. State-Space Model
4.2. Kalman Filter Implementation
4.3. Method Limitations
5. Case Study
5.1. Case 1: MD Correction
5.2. Case 2: ROP Estimation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bolt, H. Correction of Driller’s Depth: Field Example Using Driller’s Way-Point Depth Correction Methodology. Petrophysics 2019, 60, 76–91. [Google Scholar] [CrossRef]
- Guo, X.; Li, S.; Li, H. The impact of well depth error on wellbore trajectory uncertainties and error correction. Nat. Gas Oil 2020, 38, 79–84. [Google Scholar]
- Williamson, H.S. Accuracy prediction for directional measurement while drilling. SPE Drill. Complet. 2000, 15, 221–233. [Google Scholar] [CrossRef]
- Diao, B.; Gao, D.; Liu, Z. Well depth measured with MWD error correction and calculation of borehole position uncertainty. Pet. Drill. Tech. 2024, 52, 181–186. [Google Scholar] [CrossRef]
- Kyllingstad, A.; Thoresen, K.E. Improving Accuracy of Well Depth and ROP. In Proceedings of the SPE/IADC International Drilling Conference and Exhibition, The Hague, The Netherlands, 5–7 March 2019. [Google Scholar]
- Thoresen, K.E.; Kyllingstad, A. Improving Surface WOB Accuracy. In Proceedings of the IADC/SPE Drilling Conference and Exhibition, Fort Worth, TX, USA, 6–8 March 2018. [Google Scholar]
- Cayeux, E.; Skadsem, H.J.; Kluge, R. Accuracy and Correction of Hook Load Measurements During Drilling Operations. In Proceedings of the SPE/IADC Drilling Conference and Exhibition, London, UK, 17–19 March 2015. [Google Scholar] [CrossRef]
- Cayeux, E.; Skadsem, H.J. Estimation of Weight and Torque on Bit: Assessment of Uncertainties, Correction and Calibration Methods. In Proceedings of the ASME 2014 33rd International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014; Volume 5, p. V005T11A013. [Google Scholar] [CrossRef]
- Wang, C.; Ke, P.; Cao, C.; Liu, G.; Li, J.; Liu, X.; Deng, J. Study on the downhole measurement method of weight on bit with a near-bit measurement tool. Geoenergy Sci. Eng. 2023, 224, 211633. [Google Scholar] [CrossRef]
- Hareland, G.; Wu, A.; Lei, L. The field tests for measurement of downhole weight on bit (DWOB) and the calibration of a real-time DWOB model. In Proceedings of the International Petroleum Technology Conference. European Association of Geoscientists & Engineers, Doha, Qatar, 19–22 January 2014; p. cp–395. [Google Scholar]
- Wang, C.; Liu, G.; Li, J.; Zhang, T.; Jiang, H.; Ling, X.; Ren, K. New methods of eliminating downhole WOB measurement error owing to temperature variation and well pressure differential. J. Pet. Sci. Eng. 2018, 171, 1420–1432. [Google Scholar] [CrossRef]
- Barbosa, L.; Nascimento, A.; Mathias, M.; Carvalho, J. Machine learning methods applied to drilling rate of penetration prediction and optimization—A review. J. Pet. Sci. Eng. 2019, 183, 106332. [Google Scholar] [CrossRef]
- Hegde, C.; Daigle, H.; Millwater, H.; Gray, K. Analysis of rate of penetration (ROP) prediction in drilling using physics-based and data driven models. J. Pet. Sci. Eng. 2017, 159, 295–306. [Google Scholar] [CrossRef]
- Hegde, C.; Soares, C.; Gray, K. Rate of penetration (ROP) modeling using hybrid models: Deterministic and machine learning. In Proceedings of the Unconventional Resources Technology Conference, Denver, CO, USA, 22–24 July 2019. [Google Scholar] [CrossRef]
- Ma, S.; Sui, D. ROP Calculation Methods Comparisons. In Proceedings of the ASME 2024 43rd International Conference on Ocean, Offshore and Arctic Engineering, Singapore, 9–14 June 2024; Volume 8, p. V008T11A029. [Google Scholar] [CrossRef]
- Liu, Y.; Ma, T.; Chen, P.; Yang, C. Method and apparatus for monitoring of downhole dynamic drag and torque of drill-string in horizontal wells. J. Pet. Sci. Eng. 2018, 164, 320–332. [Google Scholar] [CrossRef]
- Johancsik, C.; Friesen, D.; Dawson, R. Torque and drag in directional wells-prediction and measurement. J. Pet. Technol. 1984, 36, 987–992. [Google Scholar] [CrossRef]
- Liu, X.; Vlajic, N.; Long, X.; Meng, G.; Balachandran, B. Coupled axial-torsional dynamics in rotary drilling with state-dependent delay: Stability and control. Nonlinear Dyn. 2014, 78, 1891–1906. [Google Scholar] [CrossRef]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Length of the drill string (L) | 5000 | m |
| Young’s Modulus for steel (E) | Pa | |
| Cross-sectional area (A) | m2 | |
| Axial friction coefficient () | 0.25 | - |
| Internal pressure () | 35 | MPa |
| External pressure () | 15 | MPa |
| Inner cross-sectional area () | m2 | |
| Outer cross-sectional area () | m2 | |
| Thermal expansion coefficient () | 1/K | |
| Temperature difference () | 200 | °C |
| Parameters | Symbol | Value | Unit |
|---|---|---|---|
| Discrete mass | M | 3.4 | kg |
| Discrete rotary inertia | I | 116 | kg m2 |
| Axial stiffness | 7 | N/m | |
| Torsion stiffness | 938 | Nm/rad | |
| Axial damping | 1.56 | Ns/m | |
| Torsion damping | 32.9 | Nsm/rad | |
| Specific energy of rock | 0–110 | Mpa | |
| Contact strength | 60 | Mpa | |
| Radius of drill bit | a | 108 | mm |
| Wearflat length of drill bit | ℓ | 1.2 | mm |
| Cutter face inclination | 0.6 | - | |
| Frictional coefficient for rock–bit interaction | 0.6 | - | |
| Geometry parameter of drill bit | 1 | - | |
| Number of blades of drill bit | n | 4 | - |
| Ratio of axial to torsion natural frequencies | 1.6 | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sui, D.; Aadnøy, B.S. Rate of Penetration Estimation with Parameter Correction. Appl. Sci. 2025, 15, 4650. https://doi.org/10.3390/app15094650
Sui D, Aadnøy BS. Rate of Penetration Estimation with Parameter Correction. Applied Sciences. 2025; 15(9):4650. https://doi.org/10.3390/app15094650
Chicago/Turabian StyleSui, Dan, and Bernt Sigve Aadnøy. 2025. "Rate of Penetration Estimation with Parameter Correction" Applied Sciences 15, no. 9: 4650. https://doi.org/10.3390/app15094650
APA StyleSui, D., & Aadnøy, B. S. (2025). Rate of Penetration Estimation with Parameter Correction. Applied Sciences, 15(9), 4650. https://doi.org/10.3390/app15094650