
A Large Language Model Driven Knowledge Graph Construction Scheme for Semantic Communication


Abstract
1. Introduction
- An LLM-driven framework is developed to construct task SKBs, and entity extraction accuracy is improved by using few-shot learning technology. With this approach, task knowledge bases in semantic communication systems can be built without the high dependence on manual annotation and domain expertise found in traditional knowledge graph construction methods.
- The knowledge base for UAV aerial photography tasks is designed, which provides basic support for the application of task-oriented semantic communication technology in UAV aerial photography scenes. This advancement is expected to advance the adoption of semantic communication in drone communications, addressing critical challenges, such as bandwidth resource constraints, in drone communication systems.
- In the experimental phase, this study tested multiple LLMs. The results demonstrate that all LLMs successfully accomplished entity extraction and relationship analysis tasks with robust performance. Especially, DeepSeek provided authentic and valid corpus data, significantly enhancing knowledge base construction reliability. The experimental results validate the effectiveness and reliability of the proposed knowledge graph construction scheme.
2. Related Work
2.1. The Construction Method for the Semantic Knowledge Base
2.2. Application of Large Language Models
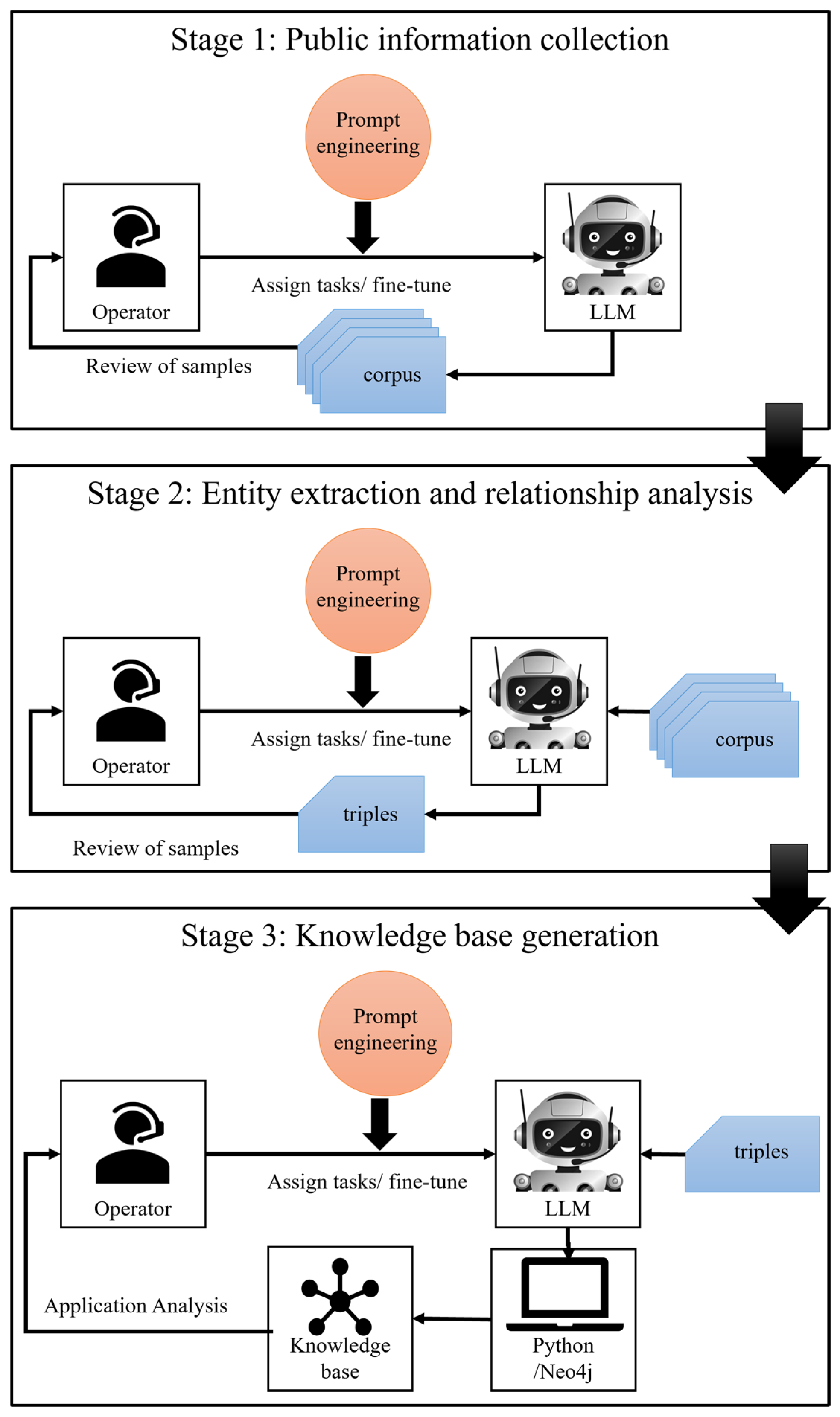
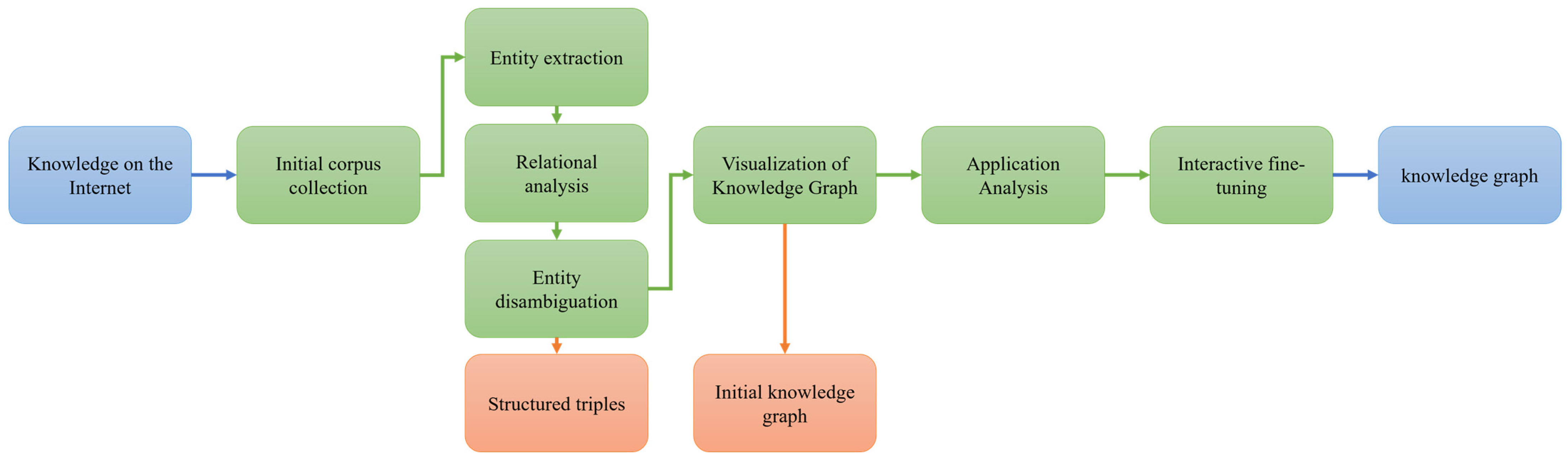
3. Method
- Stage 1: Public Information Collection
- Stage 2: Entity Extraction and Relationship Analysis
- a.
- Entity Extraction
- b.
- Relationship Analysis
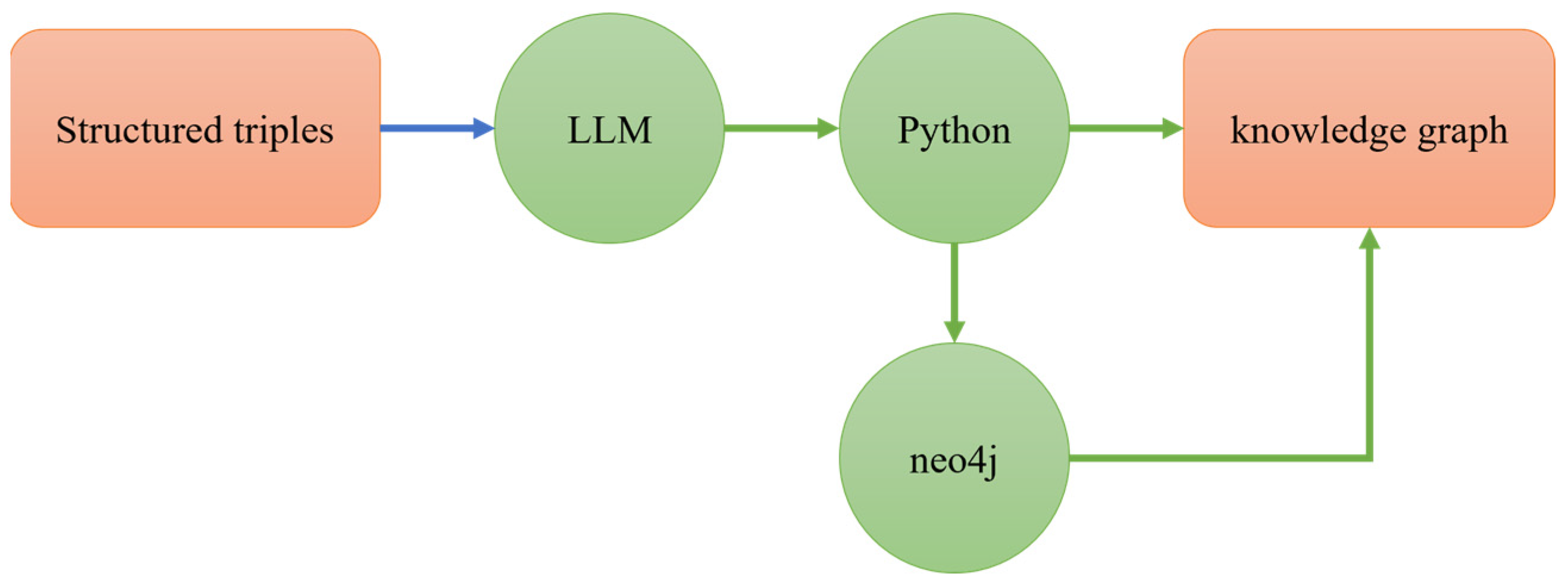
- Stage 3: Knowledge Base Generation
3.1. Corpus Collection
- Specifying a task directly to the LLMs may cause the LLMs to misinterpret the task, such as in the output of ERNIE Bot and iFLTTEK.
- Specifying a task directly to the LLMs may cause the output of the LLMs not to be as expected, such as the output of DeepSeek.
- a.
- Information Completeness:
- b.
- Content Authenticity:
3.2. Entity Extraction and Relationship Analysis
- Frequency Significance: Assessed through the frequency of occurrence of entities in different corpora under the same task.
- Descriptive Salience: Assessed through contextual importance indicators in semantic expressions
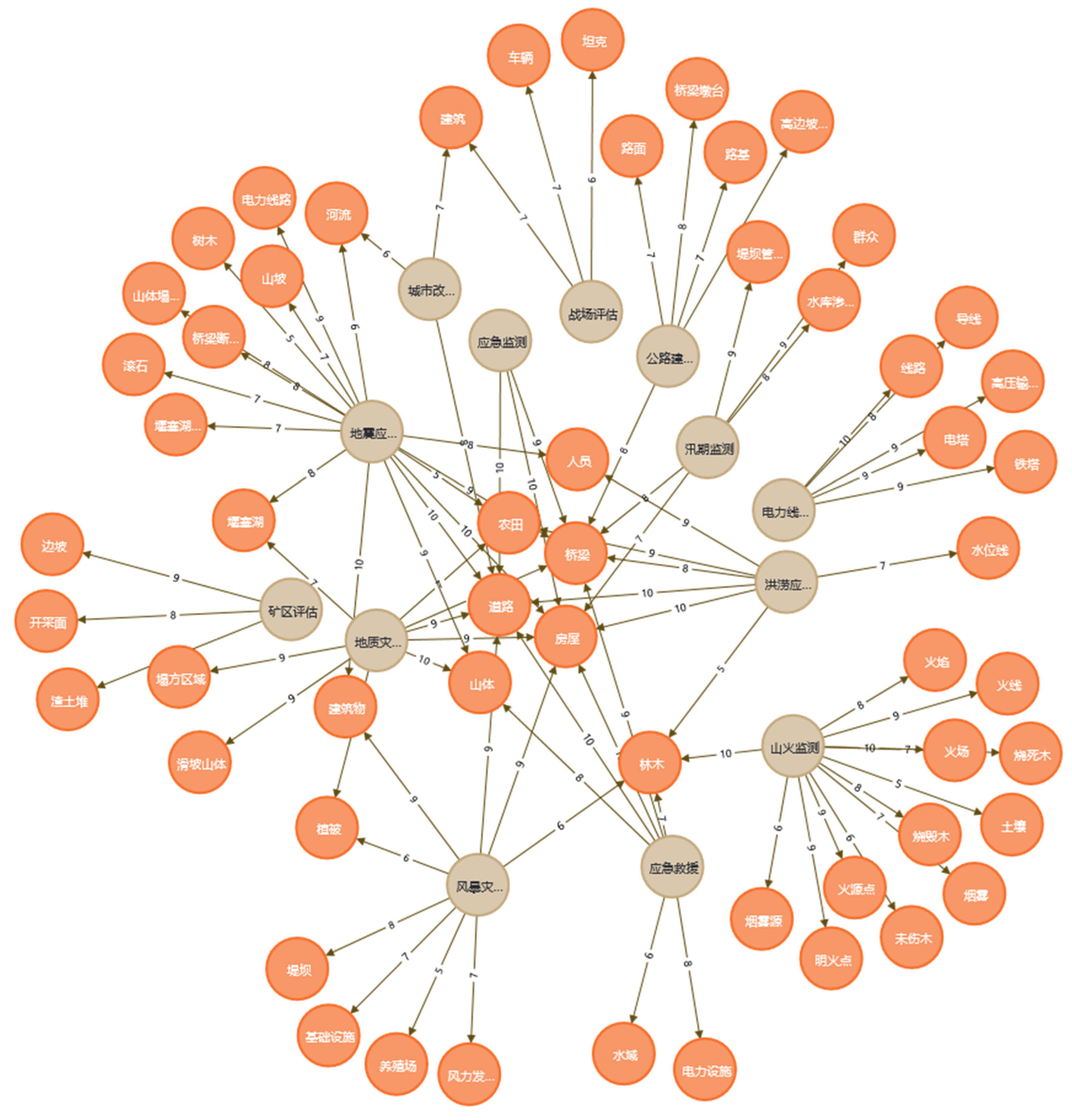
3.3. Knowledge Base Generation
3.4. Knowledge Base Updating
4. Performance Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input | 你的任务是搜集无人机航拍技术在应急救援中应用的新闻报道、官方通告,要求以独立段落形式呈现,每一段均描述了任务背景(如灾后损失评估)和航拍到的实体目标(如林木、房屋等)。 | |
| Output | DeepSeek | 1.背景:2025年春节期间无人机禁飞管理 为保障春节期间系列活动的安全,2025年2月1日04时至08时30分,在八一大道以东、广场南路以西等区域设立临时禁飞区,禁止无人机等“低慢小”航空器飞行。此举旨在防止航拍等行为干扰活动秩序,确保公共安全。 2.背景:海南省台风“摩羯”灾后评估 2024年9月,海南省遭遇台风“摩羯”袭击,自然资源部第七地形测量队使用4架无人机对海口市、文昌市等受灾区域进行航拍,获取了326张照片和55个视频,清晰记录了房屋、风力发电机组、植被及养殖场的损毁情况,为灾后恢复提供了科学依据。 |
| ERNIE Bot | 1.无人机助力灾后损失评估 任务背景:某地区遭受严重洪水灾害,导致大片农田被淹,房屋受损严重。为了准确评估灾害损失,当地应急管理部门迅速启动了无人机航拍计划。 航拍实体目标:无人机对受灾区域进行了全面航拍,重点拍摄了被淹的农田、倒塌的房屋以及受损的道路和桥梁,为后续的灾害损失评估提供了详实的数据支持。 | |
| iFLTTEK | 新闻报道一 在【具体日期】发生的【灾害名称】中,受灾区域面临着严重的灾情,急需对灾后损失进行全面评估,以便制定后续救援和重建计划。为此,应急救援部门迅速出动了配备先进无人机航拍技术的团队。 无人机缓缓升空,开始在受灾区域上空进行全方位、多角度的航拍作业。从高空俯瞰,原本郁郁葱葱的山林如今部分区域出现了大片林木倾倒的现象,一些粗壮的树木横七竖八地躺在地上,树枝断裂散落一地,山体也因滑坡出现了不同程度的土石裸露。而在村落区域,许多房屋受到了不同程度的损坏,有的房屋屋顶被掀开,瓦片散落在周围;有的房屋墙体出现裂缝甚至部分倒塌,屋内的家具和生活用品也被掩埋在废墟之中。通过无人机航拍传回的高清图像和视频资料,救援人员能够清晰地了解到各个区域的受灾情况,为精准评估灾后损失提供了有力依据。 | |
| DeepSeekwith few-shot learning | 1.西藏日喀则地震灾情侦察 2025年1月7日,西藏日喀则市定日县发生6.8级地震,震源深度10公里,造成大量房屋倒塌和人员伤亡。西藏自治区应急管理厅紧急调派翼龙-2H应急救灾型无人机,对震中区域进行全面灾情侦察。无人机通过搭载光电设备和合成孔径雷达,成功捕捉到房屋倒塌、人员受困点位、救援安置点布局等关键信息,并在夜间低能见度条件下提供稳定图像和数据,为抢险救援提供了坚实支持。 2.广州春节应急管理 2025年春节期间,广州市应急指挥中心利用无人机对白鹅潭烟花汇演现场进行实时监控,通过高清摄像头和AI算力云台相机识别人流、车流,统计数量,及时发现人群聚集、拥堵等安全隐患。同时,无人机还对火炉山、白水寨等重点林区进行巡航,监测森林火险,劝阻野外违规用火行为,并通过热成像仪实时监测火情隐患。 | |
| Input | 你的任务是处理下列所有文本,要求用【】标记每一段文本中的有关无人机拍摄到的实体目标的描述(如倒塌的建筑物),并再每一段文本最后给出任务背景和拍摄到的实体(如地震灾后救援-建筑物、道路) | |
| Output | DeepSeek | 加州山火中,无人机利用红外传感器实时捕捉【火源位置】及【火势扩散方向】,监测【林木燃烧范围】和【烟雾覆盖区域】,辅助消防部门制定灭火策略。 任务背景:山火救援;拍摄到的实体:火源位置、火势方向、林木燃烧范围、烟雾覆盖区域 四川仁和区暴雨灾害后,无人机拍摄【山体滑坡区域的地形变化】及【植被破坏情况】,生成高精度三维模型辅助灾后重建规划。 任务背景:暴雨灾后重建;拍摄到的实体:山体滑坡地形变化、植被破坏 重庆通过无人机航拍记录【城市道路】、【建筑】及【河流】现状,为旧城改造和绿化工程提供基础地理信息,提升规划效率。 任务背景:城市规划监测;拍摄到的实体:道路、建筑、河流 |
| ERNIE Bot | 加州山火中,无人机利用红外传感器实时捕捉【火源位置】及【火势扩散方向】,监测【林木燃烧范围】和【烟雾覆盖区域】,辅助消防部门制定灭火策略。(加州山火-火源、火势、林木燃烧范围、烟雾覆盖区域) 四川仁和区暴雨灾害后,无人机拍摄【山体滑坡区域的地形变化】及【植被破坏情况】,生成高精度三维模型辅助灾后重建规划。(四川仁和区暴雨灾害-山体滑坡区域、植被破坏情况) 重庆通过无人机航拍记录【城市道路】、【建筑】及【河流现状】,为旧城改造和绿化工程提供基础地理信息,提升规划效率。(重庆旧城改造-城市道路、建筑、河流) | |
| iFLTTEK | 加州山火中,无人机利用红外传感器实时捕捉火源位置及火势扩散方向,监测林木燃烧范围和烟雾覆盖区域,辅助消防部门制定灭火策略。 四川仁和区暴雨灾害后,无人机拍摄【山体滑坡区域的地形变化及植被破坏情况】,生成高精度三维模型辅助灾后重建规划。 重庆通过无人机航拍记录城市道路、建筑及河流现状,为旧城改造和绿化工程提供基础地理信息,提升规划效率。 | |
| Input | 1.2023年新疆独库公路部署无人机,定期扫描12处【高边坡裂缝】、8座【桥梁墩台】位移,发现3处【路面】塌陷前兆,巡检效率较人工提升4倍,养护成本降低45%。(公路巡检-高边坡裂缝、桥梁墩台、路面) 2… 你的任务是参考上述案例处理下列所有文本,要求用【】标记每一段文本中的有关无人机拍摄到的实体目标的描述(如倒塌的建筑物),并再每一段文本最后给出任务背景和拍摄到的实体(如地震灾后救援-建筑物、道路、电力线路、山体)。文本如下: | |
| Output | DeepSeek | 加州山火中,无人机利用红外传感器实时捕捉【火源位置】及【火势扩散方向】,监测【林木燃烧范围】和【烟雾覆盖区域】,辅助消防部门制定灭火策略。(山火救援-火源点、火势方向、林木、烟雾源) 四川仁和区暴雨灾害后,无人机拍摄【山体滑坡区域】的【地形变化】及【植被破坏情况】,生成高精度三维模型辅助灾后重建规划。(暴雨灾害监测-山体、地形、植被) 重庆通过无人机航拍记录城市【道路】、【建筑】及【河流】现状,为旧城改造和绿化工程提供基础地理信息,提升规划效率。(城市规划巡检-道路、建筑、河流) |
| ERNIE Bot | 加州山火中,无人机利用红外传感器实时捕捉【火源位置】及【火势扩散方向】,监测【林木燃烧范围】和【烟雾覆盖区域】,辅助消防部门制定灭火策略。 (山火救援-火源、火势、林木、烟雾) 四川仁和区暴雨灾害后,无人机拍摄【山体滑坡区域的地形变化】及【植被破坏情况】,生成高精度三维模型辅助灾后重建规划。 (暴雨灾后救援-山体、植被) 重庆通过无人机航拍记录【城市道路】、【建筑】及【河流现状】,为旧城改造和绿化工程提供基础地理信息,提升规划效率。 (城市规划-道路、建筑、河流) | |
| iFLTTEK | 加州山火中,无人机利用红外传感器实时捕捉【火源位置及火势扩散方向】,监测【林木燃烧范围和烟雾覆盖区域】,辅助消防部门制定灭火策略。(山火预警监测-火源点、林木) 四川仁和区暴雨灾害后,无人机拍摄【山体滑坡区域的地形变化及植被破坏情况】,生成高精度三维模型辅助灾后重建规划。(地质灾害救援-山体滑坡) 重庆通过无人机航拍记录城市【道路】、【建筑及河流现状】,为旧城改造和绿化工程提供基础地理信息,提升规划效率。(城市规划-道路、建筑、河流) | |
| Input | 分析参考资料,分析时请平等考虑实体出现的频率和对实体的描述,为下列实体与任务的相关性赋分(0–10分),如地震应急救援-建筑物-10分。 | |||
| Output | DeepSeek | ERNIE Bot | iFLTTEK | |
| 房屋 | 10 | 10 | 10 | |
| 道路 | 10 | 10 | 10 | |
| 农田 | 9 | 10 | 9 | |
| 人员 | 9 | 10 | 8 | |
| 林木 | 5 | 6 | 7 | |
| 桥梁 | 8 | 8 | 7 | |
| 水位线 | 7 | 10 | 7 | |
| Input | 以上是任务-实体-相关性分数形式的三元组,描述了不同任务下不同实体的任务相关性分数。请根据上述资料推理城市爆炸应急救援、冻雨交通疏导、暴风雪应急救援三个任务中可能存在的实体,并以任务-实体-分数的形式输出。 | ||||||
| Output | DeepSeek | ERNIE Bot | iFLTTEK | ||||
| 城市爆炸应急救援 | 建筑物 | 10 | 房屋 | 10 | 房屋 | 10 | |
| 道路 | 9 | 道路 | 10 | 道路 | 8 | ||
| 人员 | 10 | 人员 | 8 | 桥梁 | 7 | ||
| 电力设施 | 8 | 桥梁 | 9 | 电力设施 | 9 | ||
| 桥梁断裂点 | 8 | 电力设施 | 8 | 人员 | 9 | ||
| 烟雾源 | 7 | 建筑物 | 8 | ||||
| 火焰 | 7 | ||||||
| 基础设施 | 7 | ||||||
| 冻雨交通疏导 | 道路 | 10 | 道路 | 10 | 道路 | 10 | |
| 桥梁 | 9 | 桥梁 | 8 | 桥梁 | 8 | ||
| 车辆 | 7 | 电力线路 | 9 | 车辆 | 7 | ||
| 电力线路 | 8 | 树木 | 6 | ||||
| 铁塔 | 7 | 基础设施 | 7 | ||||
| 基础设施 | 7 | 电线 | 7 | ||||
| 路面结冰带 | 9 | ||||||
| 暴风雪应急救援 | 道路 | 10 | 房屋 | 10 | 房屋 | 10 | |
| 建筑物 | 9 | 道路 | 10 | 道路 | 9 | ||
| 人员 | 9 | 桥梁 | 9 | 桥梁 | 8 | ||
| 电力设施 | 8 | 电力设施 | 8 | 林木 | 6 | ||
| 车辆 | 7 | 人员 | 9 | 电力设施 | 8 | ||
| 林木 | 7 | 人员 | 8 | ||||
| 群众 | 9 | ||||||
| 风力发电机组 | 6 | ||||||
References
- Shannon, C.; Weaver, W. The Mathematical Theory of Communication. Philos. Rev. 1949, 60, 398–400. [Google Scholar]
- Jiang, S.; Liu, Y.; Zhang, Y.; Luo, P.; Cao, K.; Xiong, J.; Zhao, H.; Wei, J. Reliable Semantic Communication System Enabled by Knowledge Graph. Entropy 2022, 24, 846. [Google Scholar] [CrossRef] [PubMed]
- Liang, J.; Xiao, Y.; Li, Y.; Shi, G.; Bennis, M. Life-Long Learning for Reasoning-Based Semantic Communication. In Proceedings of the 2022 IEEE International Conference on Communications Workshops (ICC Workshops), Seoul, Republic of Korea, 16 May 2022; pp. 271–276. [Google Scholar]
- Xiao, Y.; Li, Y.; Shi, G.; Poor, H.V. Reasoning on the Air: An Implicit Semantic Communication Architecture. In Proceedings of the 2022 IEEE International Conference on Communications Workshops (ICC Workshops), Seoul, Republic of Korea, 16 May 2022; pp. 289–294. [Google Scholar]
- Li, A.; Wei, X.; Wu, D.; Zhou, L. Cross-Modal Semantic Communications. IEEE Wirel. Commun. 2022, 29, 144–151. [Google Scholar] [CrossRef]
- Chen, H.; Luo, X. An Automatic Literature Knowledge Graph and Reasoning Network Modeling Framework Based on Ontology and Natural Language Processing. Adv. Eng. Inform. 2019, 42, 100959. [Google Scholar] [CrossRef]
- Floridi, L.; Chiriatti, M. GPT-3: Its Nature, Scope, Limits, and Consequences. Minds Mach. 2020, 30, 681–694. [Google Scholar] [CrossRef]
- Kommineni, V.K.; König-Ries, B.; Samuel, S. From Human Experts to Machines: An LLM Supported Approach to Ontology and Knowledge Graph Construction. arXiv 2024, arXiv:2403.08345. [Google Scholar]
- Zhang, Y.; Hao, Y. Traditional Chinese Medicine Knowledge Graph Construction Based on Large Language Models. Electronics 2024, 13, 1395. [Google Scholar] [CrossRef]
- Shi, G.; Gao, D.; Song, X.; Chai, J.; Yang, M.; Xie, X.; Li, L.; Li, X. A New Communication Paradigm: From Bit Accuracy to Semantic Fidelity. arXiv 2021, arXiv:2101.12649. [Google Scholar]
- Zhou, F.; Li, Y.; Xu, M.; Yuan, L.; Wu, Q.; Hu, R.Q.; Al-Dhahir, N. Cognitive Semantic Communication Systems Driven by Knowledge Graph: Principle, Implementation, and Performance Evaluation. IEEE Trans. Commun. 2023, 72, 193–208. [Google Scholar] [CrossRef]
- Yang, Y.; Guo, C.; Liu, F.; Liu, C.; Sun, L.; Sun, Q.; Chen, J. Semantic Communications With Artificial Intelligence Tasks: Reducing Bandwidth Requirements and Improving Artificial Intelligence Task Performance. EEE Ind. Electron. Mag. 2023, 17, 4–13. [Google Scholar] [CrossRef]
- Hu, Q.; Zhang, G.; Qin, Z.; Cai, Y.; Yu, G.; Li, G.Y. Robust Semantic Communications Against Semantic Noise. In Proceedings of the 2022 IEEE 96th Vehicular Technology Conference (VTC2022-Fall), London, UK, 26–29 September 2022; pp. 1–6. [Google Scholar]
- Guo, S.; Wang, Y.; Li, S.; Saeed, N. Semantic Importance-Aware Communications Using Pre-Trained Language Models. IEEE Commun. Lett. 2023, 27, 2328–2332. [Google Scholar] [CrossRef]
- Jiang, F.; Peng, Y.; Dong, L.; Wang, K.; Yang, K.; Pan, C.; You, X. Large AI Model-Based Semantic Communications. IEEE Wirel. Commun. 2024, 31, 68–75. [Google Scholar] [CrossRef]
- Guo, C.; Xi, J.; He, Z.; Liu, J.; Yang, J. A Knowledge Base Driven Task-Oriented Image Semantic Communication Scheme. Remote Sens. 2024, 16, 4044. [Google Scholar] [CrossRef]
- Guo, S.; Wang, Y.; Zhangz, P. Signal Shaping for Semantic Communication Systems with A Few Message Candidates. In Proceedings of the 2022 IEEE 96th Vehicular Technology Conference (VTC2022-Fall), London, UK, 26–29 September 2022; pp. 1–5. [Google Scholar]
- Jiang, F.; Dong, L.; Peng, Y.; Wang, K.; Yang, K.; Pan, C.; You, X. Large AI Model Empowered Multimodal Semantic Communications. IEEE Commun. Mag. 2024, 63, 76–82. [Google Scholar] [CrossRef]
- Nam, H.; Park, J.; Choi, J.; Bennis, M.; Kim, S.-L. Language-Oriented Communication with Semantic Coding and Knowledge Distillation for Text-to-Image Generation. In Proceedings of the ICASSP 2024–2024 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Seoul, Republic of Korea, 14–19 April 2024; pp. 13506–13510. [Google Scholar]
- Zhang, Y.; Li, Y.; Cui, L.; Cai, D.; Liu, L.; Fu, T.; Huang, X.; Zhao, E.; Zhang, Y.; Chen, Y.; et al. Siren’s Song in the AI Ocean: A Survey on Hallucination in Large Language Models. arXiv 2023, arXiv:2309.01219. [Google Scholar]
- Ni, X.; Li, P.; Li, H. Unified Text Structuralization with Instruction-Tuned Language Models. arXiv 2023, arXiv:2303.14956. [Google Scholar]
- Hu, Y.; Chen, Q.; Du, J.; Peng, X.; Keloth, V.K.; Zuo, X.; Zhou, Y.; Li, Z.; Jiang, X.; Lu, Z.; et al. Improving Large Language Models for Clinical Named Entity Recognition via Prompt Engineering. J. Am. Med. Inform. Assoc. 2024, 31, 1812–1820. [Google Scholar] [CrossRef] [PubMed]

| Input | Your task is to collect news reports and official announcements regarding aerial drone photography technology application in emergency rescue operations. Each entry should be presented as a separate paragraph, with each paragraph explicitly describing both (1) the mission context (e.g., post-disaster damage assessment) and (2) the physical entities captured by aerial photography (e.g., vegetation, residential buildings, etc.). | |
| Output | DeepSeek | 1. Background: UAV No-Fly Zone Management During 2025 Spring Festival To ensure the safety of festival events during the Spring Festival period, a temporary no-fly zone will be established from 04:00 to 08:30 on 1 February 2025, covering areas east of Bayi Avenue and west of Guangchang South Road. This measure prohibits the operation of drones and other low-altitude, slow-speed, small-sized (LSS) aircraft to prevent aerial photography from disrupting event operations and maintain public safety. 2. Background: Post-Disaster Assessment of Typhoon “Yagi” in Hainan Province In September 2024, Hainan Province was struck by Typhoon “Yagi.” The Seventh Topographic Survey Team of the Ministry of Natural Resources deployed four unmanned aerial vehicles (UAVs) to conduct aerial surveys of affected areas, including Haikou City and Wenchang City. The operation captured 326 photos and 55 videos that clearly documented damage to houses, wind turbines, vegetation, and aquaculture farms. This data provides a scientific basis for post-disaster recovery efforts. |
| ERNIE Bot | 1. Drones Assist in Post-Disaster Damage Assessment Mission Background: A region was struck by a severe flood disaster, resulting in large areas of submerged farmland and severely damaged houses. To accurately assess disaster impact, the local emergency management department promptly initiated a drone aerial survey program. Aerial Survey Objectives: Drones conducted a comprehensive aerial survey of the affected areas, focusing on capturing submerged farmland, collapsed houses, and damaged roads and bridges. The operation provided detailed data support for subsequent damage assessment and recovery planning. | |
| iFLTTEK | News Report 1 During the [disaster name] that occurred on [specific date], the affected areas faced severe devastation, necessitating a comprehensive post-disaster damage assessment to formulate follow-up rescue and reconstruction plans. To address this, the emergency response department swiftly deployed a team equipped with advanced drone aerial survey technology. The drones ascended steadily and began conducting comprehensive multi-angle aerial surveys over the disaster-stricken zones. From an aerial perspective, large swathes of once-lush forests now showed extensive tree collapse. In some areas, large trees lay haphazardly on the ground with broken branches scattered widely. Landslides exposed bare soil and rocks on slopes of varying severity. In village areas, numerous houses sustained damage: some had roofs torn off, with tiles strewn around; others exhibited cracked walls or partial collapse, burying furniture and household items under debris. The high-resolution images and video footage transmitted by the drones enabled rescue teams to clearly identify damage distribution patterns, providing critical evidence for precise damage quantification and resource allocation. | |
| DeepSeekwith few-shot learning | 1. Earthquake Damage Reconnaissance in Shigatse, Tibet On 7 January 2025, a magnitude 6.8 earthquake struck Dingri County, Shigatse City, Tibet, with a focal depth of 10 km, causing widespread building collapse and casualties. The Department of Emergency Management of Tibet Autonomous Region urgently deployed the Wing Loong-2H emergency relief UAV to conduct a full-scale damage assessment of the epicenter area. Equipped with electro-optical devices and synthetic aperture radar (SAR), the drone successfully captured critical data, including collapsed buildings, trapped personnel locations, and relief camp layouts. It also provided stable imaging and real-time data transmission under nighttime low-visibility conditions, offering robust support for rescue operations. 2. Spring Festival Emergency Management in Guangzhou During the 2025 Spring Festival, Guangzhou’s Emergency Command Center utilized drones for real-time monitoring of the Baietan fireworks display. Using AI-powered cloud platform cameras and high-definition imaging, the drones analyzed crowd and vehicle flows, quantified densities, and promptly identified risks, such as overcrowding and traffic bottlenecks. Simultaneously, drones patrolled key forested areas, like Hulu Mountain and Baishuizhai, to monitor wildfire risks, deter illegal outdoor fire use, and detect potential fire hazards via thermal imaging sensors. | |
| Input | Your task is to process all the following texts, requiring the use of [] to mark descriptions of physical targets captured by drone photography (e.g., collapsed buildings) in each paragraph. At the end of each paragraph, provide the mission context and captured entities (e.g., post-earthquake rescue—buildings, roads). | |
| Output | DeepSeek | During California’s wildfires, drones utilized infrared sensors to capture real-time data on [fire source locations] and [directions of fire spread], monitoring [forest burn areas] and [smoke-covered regions], assisting fire departments in formulating firefighting strategies. Mission Context: Wildfire Rescue; Captured Entities: fire source locations, fire spread direction, burning vegetation extent, smoke coverage areas After the rainstorm disaster in Renhe District, Sichuan, drones captured [topographic changes in landslide areas] and [vegetation damage], generating high-precision 3D models to assist in post-disaster reconstruction planning. Mission Context: Post-Rainstorm Disaster Reconstruction; Captured Entities: terrain changes in landslide areas, vegetation destruction Chongqing used drone aerial photography to record the current status of [urban roads], [buildings], and [rivers], providing basic geographic information for old city renovation and greening projects, enhancing planning efficiency. (Urban Planning Inspection—Roads, Buildings, Rivers) Mission Context: Urban Planning Monitoring; Captured Entities: roads, buildings, rivers |
| ERNIE Bot | During California’s wildfires, drones utilized infrared sensors to capture real-time data on [fire source locations] and [directions of fire spread], monitoring [forest burn areas] and [smoke-covered regions], assisting fire departments in formulating firefighting strategies. (California Wildfires—fire sources, fire spread, forest burn areas, smoke coverage) After the rainstorm disaster in Renhe District, Sichuan, drones captured [topographic changes in landslide areas] and [vegetation damage], generating high-precision 3D models to assist in post-disaster reconstruction planning. (Renhe District Rainstorm Disaster—landslide areas, vegetation damage) Chongqing used drone aerial photography to record the current status of [urban roads], [buildings], and [rivers], providing basic geographic information for old city renovation and greening projects, enhancing planning efficiency. (Chongqing Old City Renovation—urban roads, buildings, rivers) | |
| iFLTTEK | During California’s wildfires, drones utilized infrared sensors to capture real-time data on fire source locations and directions of fire spread, monitoring forest burn areas and smoke-covered regions, assisting fire departments in formulating firefighting strategies. After the rainstorm disaster in Renhe District, Sichuan, drones captured [topographic changes in landslide areas and vegetation damage], generating high-precision 3D models to assist in post-disaster reconstruction planning. Chongqing used drone aerial photography to record the current status of urban roads, buildings, and rivers, providing basic geographic information for old city renovation and greening projects, enhancing planning efficiency. | |
| Input | 1. In 2023, Xinjiang’s Duku Highway deployed drones to regularly scan 12 locations of [high slope cracks] and monitor displacement at 8 [bridge piers], detecting 3 precursors of [road surface] collapse. This improved inspection efficiency by 4 times compared to manual methods and reduced maintenance costs by 45%. (Highway inspection—high slope cracks, bridge piers, road surfaces) 2… Your task is to process all the following texts according to the above example, and you are asked to mark each paragraph with [] a description of the entity object captured by the drone (e.g., collapsed buildings), and at the end of each paragraph give the background to the task and the entity captured (e.g., earthquake rescue—buildings, roads, power lines, mountains). The text is as follows: | |
| Output | DeepSeek | During California’s wildfires, drones utilized infrared sensors to capture real-time data on [fire source locations] and [directions of fire spread], monitoring [forest burn areas] and [smoke-covered regions], assisting fire departments in formulating firefighting strategies. (Wildfire Rescue—Fire Source, Fire Spread, Forest, Smoke) After the rainstorm disaster in Renhe District, Sichuan, drones captured [topographic changes in landslide areas] and [vegetation damage], generating high-precision 3D models to assist in post-disaster reconstruction planning. (Rainstorm Disaster Monitoring—Mountains, Terrain, Vegetation) Chongqing used drone aerial photography to record the current status of urban [roads], [buildings], and [rivers], providing basic geographic information for old city renovation and greening projects, enhancing planning efficiency. (Urban Planning Inspection—Roads, Buildings, Rivers) |
| ERNIE Bot | During California’s wildfires, drones utilized infrared sensors to capture real-time data on [fire source locations] and [directions of fire spread], monitoring [forest burn areas] and [smoke-covered regions], assisting fire departments in formulating firefighting strategies. (Wildfire Rescue—Fire Source, Fire Spread, Forest, Smoke) After the rainstorm disaster in Renhe District, Sichuan, drones captured [topographic changes in landslide areas] and [vegetation damage], generating high-precision 3D models to assist in post-disaster reconstruction planning. (Rainstorm Disaster Monitoring—Mountains, Vegetation) Chongqing used drone aerial photography to record the current status of urban [roads], [buildings], and [rivers], providing basic geographic information for old city renovation and greening projects, enhancing planning efficiency. (Urban Planning Inspection—Roads, Buildings, Rivers) | |
| iFLTTEK | During California’s wildfires, drones utilized infrared sensors to capture real-time data on [fire source locations and directions of fire spread], monitoring [forest burn areas and smoke-covered regions], assisting fire departments in formulating firefighting strategies. (Wildfire Rescue—Fire Source, Forest) After the rainstorm disaster in Renhe District, Sichuan, drones captured [topographic changes in landslide areas and vegetation damage], generating high-precision 3D models to assist in post-disaster reconstruction planning. (Rainstorm Disaster Monitoring—Landslides) Chongqing used drone aerial photography to record the current status of urban [roads], [buildings, and rivers], providing basic geographic information for old city renovation and greening projects, enhancing planning efficiency. (Urban Planning Inspection—Roads, Buildings, Rivers) | |
| Input | Analyze the reference materials, and when analyzing, please consider equally both the frequency of entity occurrence and the description of the entities. Assign a relevance score (0–10) to the following entities in relation to the task, such as Earthquake Emergency Rescue—Buildings—10 points. | |||
| Output | DeepSeek | ERNIE Bot | iFLTTEK | |
| Buildings | 10 | 10 | 10 | |
| Roads | 10 | 10 | 10 | |
| Farmland | 9 | 10 | 9 | |
| Personnel | 9 | 10 | 8 | |
| Forest | 5 | 6 | 7 | |
| Bridges | 8 | 8 | 7 | |
| Water level line | 7 | 10 | 7 | |
| Input | The above are task–entity–relevance score triplets that describe the relevance scores of different entities under various tasks. Based on the provided data, please infer potential entities for the tasks “Urban Explosion Emergency Rescue,” “Freezing Rain Traffic Management,” and “Blizzard Emergency Rescue,” and output them in task–entity–score format. | ||||||
| Output | DeepSeek | ERNIE Bot | iFLTTEK | ||||
| Urban Explosion Emergency Rescue | Buildings | 10 | Houses | 10 | Houses | 10 | |
| Roads | 9 | Roads | 10 | Roads | 8 | ||
| Personnel | 10 | Personnel | 8 | Bridges | 7 | ||
| Power facilities | 8 | Bridges | 9 | Power facilities | 9 | ||
| Bridge fracture points | 8 | Power facilities | 8 | Personnel | 9 | ||
| Smoke sources | 7 | Buildings | 8 | ||||
| Flames | 7 | ||||||
| Infrastructure | 7 | ||||||
| Freezing Rain Traffic Management | Roads | 10 | Roads | 10 | Roads | 10 | |
| Bridges | 9 | Bridges | 8 | Bridges | 8 | ||
| Vehicles | 7 | Power lines | 9 | Vehicles | 7 | ||
| Power lines | 8 | Trees | 6 | ||||
| Electric towers | 7 | Infrastructure | 7 | ||||
| Infrastructure | 7 | Power lines | 7 | ||||
| Road ice zones | 9 | ||||||
| Blizzard Emergency Rescue | Roads | 10 | Houses | 10 | Houses | 10 | |
| Buildings | 9 | Roads | 10 | Roads | 9 | ||
| Personnel | 9 | Bridges | 9 | Bridges | 8 | ||
| Power facilities | 8 | Power facilities | 8 | Power facilities | 6 | ||
| Vehicles | 7 | Personnel | 9 | Personnel | 8 | ||
| Trees | 7 | Houses | 8 | ||||
| Civilians | 9 | ||||||
| Wind turbine units | 6 | ||||||
| LLM | Prompt | Precision | Recall | F1-Score |
|---|---|---|---|---|
| DeepSeek | Assigning tasks directly | 75.48% | 90.26% | 89.975 |
| Assigning task + Few-shot learning | 89.68% | 92.36% | 88.96% | |
| ERNIE Bot | Assigning tasks directly | 79.35% | 87.79% | 83.34% |
| Assigning task + Few-shot learning | 86.45% | 79.59% | 77.48% | |
| iFLTTEK | Assigning tasks directly | - | - | - |
| Assigning task + Few-shot learning | 85.81% | 91.78% | 89.04% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, C.; Liu, J.; Gao, W.; Lu, Z.; Li, Y.; Wang, C.; Yang, J. A Large Language Model Driven Knowledge Graph Construction Scheme for Semantic Communication. Appl. Sci. 2025, 15, 4575. https://doi.org/10.3390/app15084575
Guo C, Liu J, Gao W, Lu Z, Li Y, Wang C, Yang J. A Large Language Model Driven Knowledge Graph Construction Scheme for Semantic Communication. Applied Sciences. 2025; 15(8):4575. https://doi.org/10.3390/app15084575
Chicago/Turabian StyleGuo, Chang, Jiaqi Liu, Wei Gao, Zhenhai Lu, Yao Li, Chengyuan Wang, and Jungang Yang. 2025. "A Large Language Model Driven Knowledge Graph Construction Scheme for Semantic Communication" Applied Sciences 15, no. 8: 4575. https://doi.org/10.3390/app15084575
APA StyleGuo, C., Liu, J., Gao, W., Lu, Z., Li, Y., Wang, C., & Yang, J. (2025). A Large Language Model Driven Knowledge Graph Construction Scheme for Semantic Communication. Applied Sciences, 15(8), 4575. https://doi.org/10.3390/app15084575