





Dynamic UAV Task Allocation and Path Planning with Energy Management Using Adaptive PSO in Rolling Horizon Framework

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- We propose a rolling horizon framework for dynamic UAV task allocation and path planning, allowing the system to adapt to evolving task demands and environmental conditions.
- We develop an improved PSO algorithm with adaptive perturbation and simulated annealing-based local search, specifically designed to handle the multi-objective nature of the problem, including energy constraints.
- We present a comprehensive energy management model that accounts for flight, computation, and recharging activities, ensuring that UAVs can complete their missions without energy depletion.
2. Literature Review
3. Problem Formulation
3.1. System Model
3.2. UAV Characteristics
- A constant flight velocity v, which determines the time required to travel between points.
- A maximum energy capacity , with energy consumption rates during flight and during task processing.
- A service rate , which defines the speed at which the UAV processes the workload of a task.
3.3. Objective
3.4. Decision Variables
- Task allocation: A matrix , where represents the portion of the workload assigned to UAV for task at stage h; is the number of the UAVs. The allocation must satisfy the following:with for all .
- Path planning: A set of routes , where is an ordered sequence of nodes (tasks and stations) visited by UAV during stage h. Each route starts at a station and may include intermediate visits to charging stations for recharging.
3.5. Constraints
- Task completion: The entire workload of each task must be allocated to the UAVs:
- Energy limit: The cumulative energy consumption of UAV along its route must not exceed its maximum energy capacity , unless the UAV recharges at a station. If recharging is required, the UAV must visit the nearest available station when its energy level drops below a predefined threshold. Upon recharging, the energy is restored to in a time period of , where is the remaining energy before recharging. Here, is the remaining battery level of the UAV immediately before recharging.
- Station capacity: The number of UAVs simultaneously charging at any station must not exceed its capacity .
- Dynamic task updates: Between stages, new tasks may be introduced (up to a maximum of tasks), or the workloads of existing tasks may increase by a rate , reflecting the dynamic nature of the environment. Here, is the maximum increment in the workload for existing tasks between stages, while is the maximum allowable number of tasks in the system.
4. Methodology of APSO-LS
4.1. Overview of the Proposed Approach
4.2. Rolling Horizon Framework
4.3. Adaptive Perturbation PSO with Local Search (APSO-LS)
- Task allocation: A matrix , where denotes the workload assigned to UAV for task .
- Routes: A set of routes , where each is an ordered sequence of tasks and charging stations visited by UAV .
- Task allocation: Workloads are initially assigned to UAVs based on their proximity to tasks, ensuring that each task’s workload is fully allocated.
- Routes: Initial routes are constructed by assigning tasks to UAVs in a greedy manner, considering energy constraints and the need for recharging.
- Neighborhood search: Small perturbations are applied to the task allocation and route sequences to generate neighboring solutions.
- Acceptance criterion: A neighboring solution is accepted if it improves the objective function, with a probability , where is the change in the objective function and T is the current temperature.
- Cooling schedule: The temperature T is gradually decreased according to a cooling rate , allowing the algorithm to converge to a high-quality solution.
- Energy check: Before visiting each task, the UAV’s current energy level is checked. If the energy is insufficient to reach the task and return to the nearest station, the UAV is routed to the nearest available charging station.
- Charging time: The time spent charging is calculated based on the required energy to reach , using the station’s charging rate .
- Station capacity: The algorithm ensures that the number of UAVs charging at any station does not exceed by scheduling charging slots accordingly.
| Algorithm 1 APSO-LS Algorithm |
|
5. Experimental Results and Discussions
5.1. Experimental Setup
5.2. Results
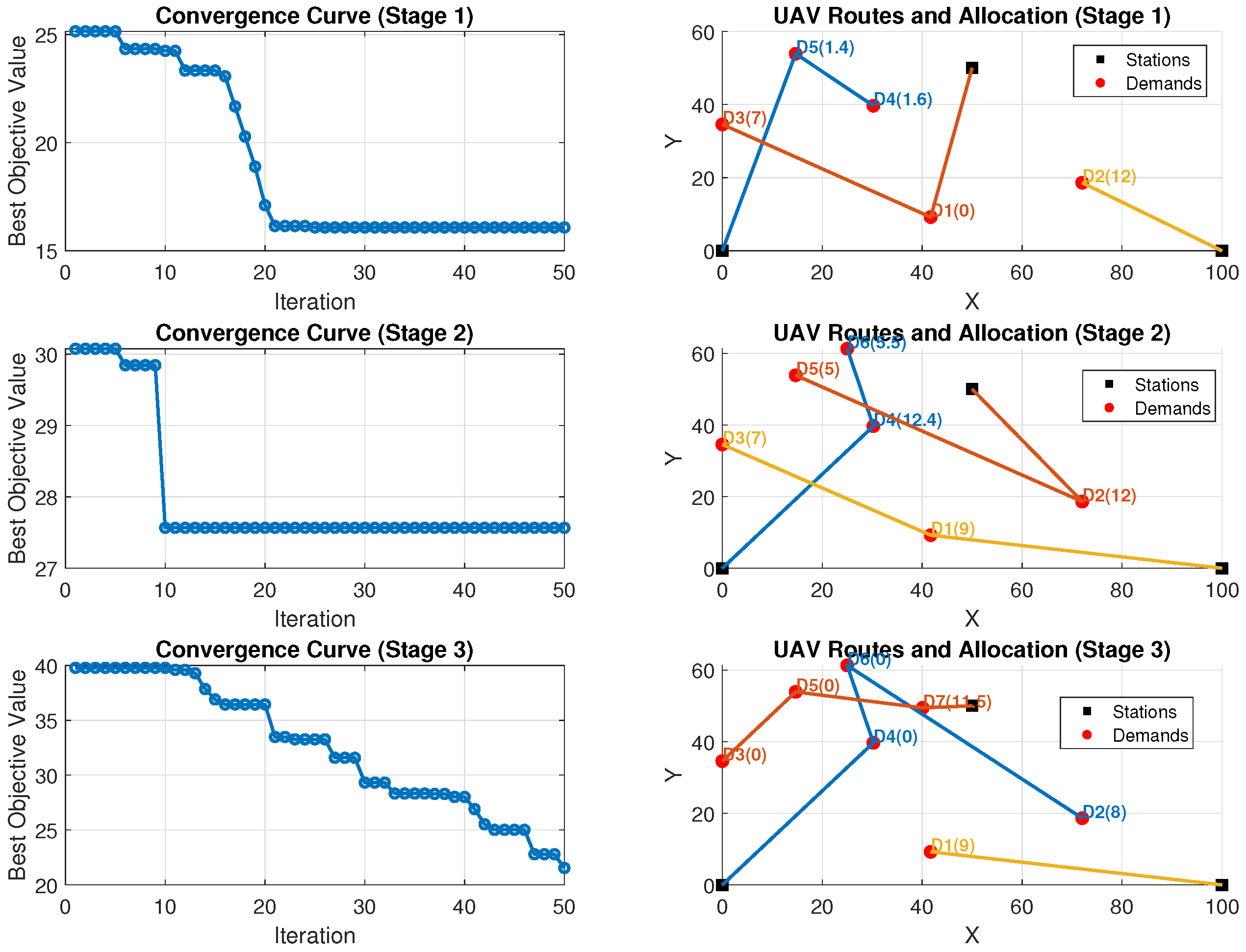
5.2.1. Convergence Analysis
- Rapid Decline in the Initial Phase
- Variations Among Different Runs
- Overall Statistics
5.2.2. UAV Routes and Allocation Visualization
- Division of Labor and Path Coverage
- Charging Station Visits and Energy Management
5.2.3. Comparison with Standard PSO Algorithm
5.2.4. Discussions
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Valente, J.; Sanz, D.; Del Cerro, J.; Barrientos, A.; de Frutos, M.Á. Near-optimal coverage trajectories for image mosaicing using a mini quad-rotor over irregular-shaped fields. Precis. Agric. 2013, 14, 115–132. [Google Scholar] [CrossRef]
- Otto, A.; Agatz, N.; Campbell, J.; Golden, B.; Pesch, E. Optimization approaches for civil applications of unmanned aerial vehicles (UAVs) or aerial drones: A survey. Networks 2018, 72, 411–458. [Google Scholar] [CrossRef]
- Shima, T.; Rasmussen, S. UAV Cooperative Decision and Control: Challenges and Practical Approaches; SIAM: Philadelphia, PA, USA, 2009. [Google Scholar]
- Bertsimas, D.J.; Van Ryzin, G. A stochastic and dynamic vehicle routing problem in the Euclidean plane. Oper. Res. 1991, 39, 601–615. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef]
- Wang, X.; Kopfer, H. Rolling horizon planning for a dynamic collaborative routing problem with full-truckload pickup and delivery requests. Flex. Serv. Manuf. J. 2015, 27, 509–533. [Google Scholar] [CrossRef]
- Eberhart, R.; Kennedy, J. A new optimizer using particle swarm theory. In Proceedings of the MHS’95. Proceedings of the Sixth International Symposium on Micro Machine and Human Science, Nagoya, Japan, 4–6 October 1995; IEEE: Piscataway, NJ, USA, 1995; pp. 39–43. [Google Scholar]
- Liang, J.J.; Qin, A.K.; Suganthan, P.N.; Baskar, S. Comprehensive learning particle swarm optimizer for global optimization of multimodal functions. IEEE Trans. Evol. Comput. 2006, 10, 281–295. [Google Scholar] [CrossRef]
- Zhan, Z.H.; Zhang, J.; Li, Y.; Chung, H.S.H. Adaptive particle swarm optimization. IEEE Trans. Syst. Man Cybern. Part (Cybern.) 2009, 39, 1362–1381. [Google Scholar] [CrossRef]
- Choset, H. Coverage for robotics—A survey of recent results. Ann. Math. Artif. Intell. 2001, 31, 113–126. [Google Scholar] [CrossRef]
- Galceran, E.; Carreras, M. A survey on coverage path planning for robotics. Robot. Auton. Syst. 2013, 61, 1258–1276. [Google Scholar] [CrossRef]
- Qin, H.; Meng, Z.; Meng, W.; Chen, X.; Sun, H.; Lin, F.; Ang, M.H. Autonomous exploration and mapping system using heterogeneous UAVs and UGVs in GPS-denied environments. IEEE Trans. Veh. Technol. 2019, 68, 1339–1350. [Google Scholar] [CrossRef]
- Otte, M.; Kuhlman, M.; Sofge, D. Multi-robot task allocation with auctions in harsh communication environments. In Proceedings of the 2017 International Symposium on Multi-Robot and Multi-Agent Systems (MRS), Los Angeles, CA, USA, 4–5 December 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 32–39. [Google Scholar]
- Yu, H.; Meier, K.; Argyle, M.; Beard, R.W. Cooperative path planning for target tracking in urban environments using unmanned air and ground vehicles. IEEE/ASME Trans. Mechatron. 2014, 20, 541–552. [Google Scholar]
- Ye, F.; Chen, J.; Sun, Q.; Tian, Y.; Jiang, T. Decentralized task allocation for heterogeneous multi-UAV system with task coupling constraints. J. Supercomput. 2021, 77, 111–132. [Google Scholar]
- Yin, Y.; Wang, Z.; Zheng, L.; Su, Q.; Guo, Y. Autonomous UAV navigation with adaptive control based on deep reinforcement learning. Electronics 2024, 13, 2432. [Google Scholar] [CrossRef]
- Ramirez-Atencia, C.; Bello-Orgaz, G.; R-Moreno, M.D.; Camacho, D. Solving complex multi-UAV mission planning problems using multi-objective genetic algorithms. Soft Comput. 2017, 21, 4883–4900. [Google Scholar]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Efficient deployment of multiple unmanned aerial vehicles for optimal wireless coverage. IEEE Commun. Lett. 2016, 20, 1647–1650. [Google Scholar]
- Dorling, K.; Heinrichs, J.; Messier, G.G.; Magierowski, S. Vehicle routing problems for drone delivery. IEEE Trans. Syst. Man Cybern. Syst. 2016, 47, 70–85. [Google Scholar]
- Zeng, Y.; Zhang, R. Energy-efficient UAV communication with trajectory optimization. IEEE Trans. Wirel. Commun. 2017, 16, 3747–3760. [Google Scholar]
- Diller, J.; Han, Q. Energy-aware uav path planning with adaptive speed. In Proceedings of the 2023 International Conference on Autonomous Agents and Multiagent Systems, London, UK, 29 May–2 June 2023; pp. 923–931. [Google Scholar]
- Fevgas, G.; Lagkas, T.; Argyriou, V.; Sarigiannidis, P. Coverage path planning methods focusing on energy efficient and cooperative strategies for unmanned aerial vehicles. Sensors 2022, 22, 1235. [Google Scholar] [CrossRef] [PubMed]
- Phalapanyakoon, K.; Siripongwutikorn, P. Route planning of heterogeneous unmanned aerial vehicles under recharging and mission time with carrying payload constraints. J. Ind. Eng. Manag. 2023, 16, 215–235. [Google Scholar] [CrossRef]
- Majeed, A.; Hwang, S.O. A multi-objective coverage path planning algorithm for UAVs to cover spatially distributed regions in urban environments. Aerospace 2021, 8, 343. [Google Scholar] [CrossRef]
- Shi, Y.; Lin, Y.; Li, B.; Li, R.Y.M. A bi-objective optimization model for the medical supplies’ simultaneous pickup and delivery with drones. Comput. Ind. Eng. 2022, 171, 108389. [Google Scholar] [PubMed]
- Chiaraviglio, L.; D’andreagiovanni, F.; Choo, R.; Cuomo, F.; Colonnese, S. Joint optimization of area throughput and grid-connected microgeneration in UAV-based mobile networks. IEEE Access 2019, 7, 69545–69558. [Google Scholar]
- Carrese, S.; D’andreagiovanni, F.; Nardin, A.; Giacchetti, T.; Zamberlan, L. Seek & Beautify: integrating UAVs in the optimal beautification of e-scooter sharing fleets. In Proceedings of the 2021 7th International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Heraklion, Greece, 16–17 June 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–6. [Google Scholar]
- Clerc, M.; Kennedy, J. The particle swarm-explosion, stability, and convergence in a multidimensional complex space. IEEE Trans. Evol. Comput. 2002, 6, 58–73. [Google Scholar]
- Ratnaweera, A.; Halgamuge, S.K.; Watson, H.C. Self-organizing hierarchical particle swarm optimizer with time-varying acceleration coefficients. IEEE Trans. Evol. Comput. 2004, 8, 240–255. [Google Scholar]
- Yu, Z.; Si, Z.; Li, X.; Wang, D.; Song, H. A novel hybrid particle swarm optimization algorithm for path planning of UAVs. IEEE Internet Things J. 2022, 9, 22547–22558. [Google Scholar]
- Huo, C.L.; Lai, T.Y.; Sun, T.Y. The preliminary study on multi-swarm sharing particle swarm optimization: Applied to UAV path planning problem. In Proceedings of the 2011 IEEE Congress of Evolutionary Computation (CEC), New Orleans, LA, USA, 5–8 June 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1770–1776. [Google Scholar]
- Storn, R.; Price, K. Differential evolution—A simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Karaboga, D.; Basturk, B. A powerful and efficient algorithm for numerical function optimization: Artificial bee colony (ABC) algorithm. J. Glob. Optim. 2007, 39, 459–471. [Google Scholar]
- Zhao, T.; Pan, X.; He, Q. Application of dynamic ant colony algorithm in route planning for UAV. In Proceedings of the 2017 Seventh International Conference on Information Science and Technology (ICIST), Da Nang, Vietnam, 16–19 April 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 433–437. [Google Scholar]
- Han, S.; Fan, C.; Li, X.; Luo, X.; Liu, Z. A modified genetic algorithm for task assignment of heterogeneous unmanned aerial vehicle system. Meas. Control 2021, 54, 994–1014. [Google Scholar] [CrossRef]
- Yanmaz, E.; Yahyanejad, S.; Rinner, B.; Hellwagner, H.; Bettstetter, C. Drone networks: Communications, coordination, and sensing. Ad Hoc Netw. 2018, 68, 1–15. [Google Scholar]
- Raja, S.; Habibi, G.; How, J.P. Communication-aware consensus-based decentralized task allocation in communication constrained environments. IEEE Access 2021, 10, 19753–19767. [Google Scholar]
- Albaker, B.; Rahim, N. A survey of collision avoidance approaches for unmanned aerial vehicles. In Proceedings of the 2009 International Conference for Technical Postgraduates (TECHPOS), Kuala Lumpur, Malaysia, 14–15 December 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 1–7. [Google Scholar]
- Yang, S.; Meng, Z.; Chen, X.; Xie, R. Real-time obstacle avoidance with deep reinforcement learning three-dimensional autonomous obstacle avoidance for UAV. In Proceedings of the 2019 International Conference on Robotics, Intelligent Control and Artificial Intelligence, Shanghai, China, 20–22 September 2019; pp. 324–329. [Google Scholar]
- Rieke, M.; Foerster, T.; Geipel, J.; Prinz, T. High-precision positioning and real-time data processing of UAV-systems. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 38, 119–124. [Google Scholar]
- Luo, Y.; Ding, W.; Zhang, B. Optimization of task scheduling and dynamic service strategy for multi-UAV-enabled mobile-edge computing system. IEEE Trans. Cogn. Commun. Netw. 2021, 7, 970–984. [Google Scholar]
- Zhou, Z.; Feng, J.; Gu, B.; Ai, B.; Mumtaz, S.; Rodriguez, J.; Guizani, M. When mobile crowd sensing meets UAV: Energy-efficient task assignment and route planning. IEEE Trans. Commun. 2018, 66, 5526–5538. [Google Scholar]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, Z.; Guo, W. Dynamic UAV Task Allocation and Path Planning with Energy Management Using Adaptive PSO in Rolling Horizon Framework. Appl. Sci. 2025, 15, 4220. https://doi.org/10.3390/app15084220
Han Z, Guo W. Dynamic UAV Task Allocation and Path Planning with Energy Management Using Adaptive PSO in Rolling Horizon Framework. Applied Sciences. 2025; 15(8):4220. https://doi.org/10.3390/app15084220
Chicago/Turabian StyleHan, Zhen, and Weian Guo. 2025. "Dynamic UAV Task Allocation and Path Planning with Energy Management Using Adaptive PSO in Rolling Horizon Framework" Applied Sciences 15, no. 8: 4220. https://doi.org/10.3390/app15084220
APA StyleHan, Z., & Guo, W. (2025). Dynamic UAV Task Allocation and Path Planning with Energy Management Using Adaptive PSO in Rolling Horizon Framework. Applied Sciences, 15(8), 4220. https://doi.org/10.3390/app15084220