
Dual-Indicator Micro-Electro-Mechanical System Monitoring Method for Rock Instability Early Warning



Abstract
1. Introduction
2. Fundamental Theory and Methodology
2.1. MEMS Sensing Mechanisms
2.2. Dynamic Interdependence: NF Versus Safety Factor
2.3. Quantification Metrics for MEMS-Acquired Stability Indicators
3. Experimental Validation and Performance Evaluation
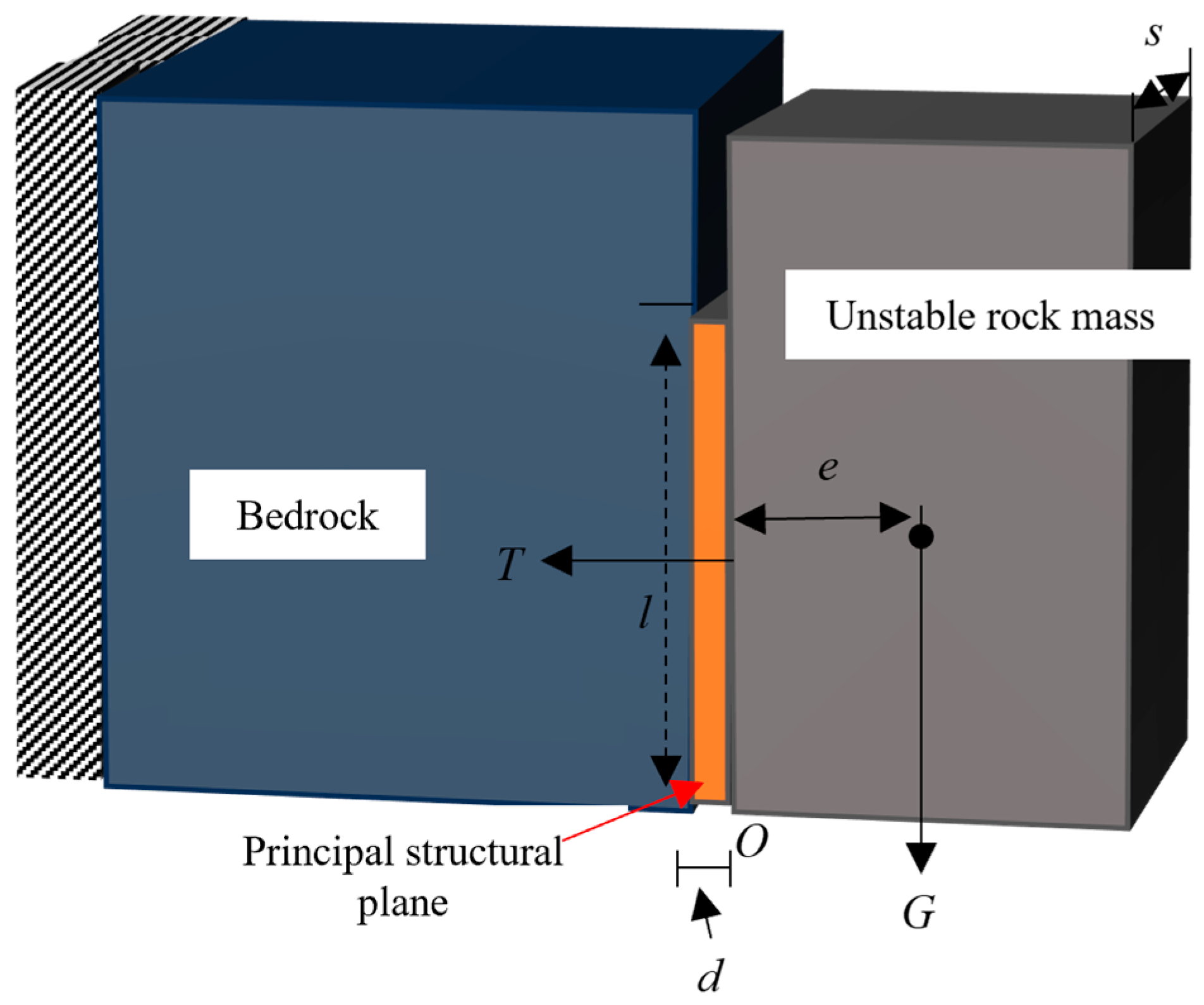
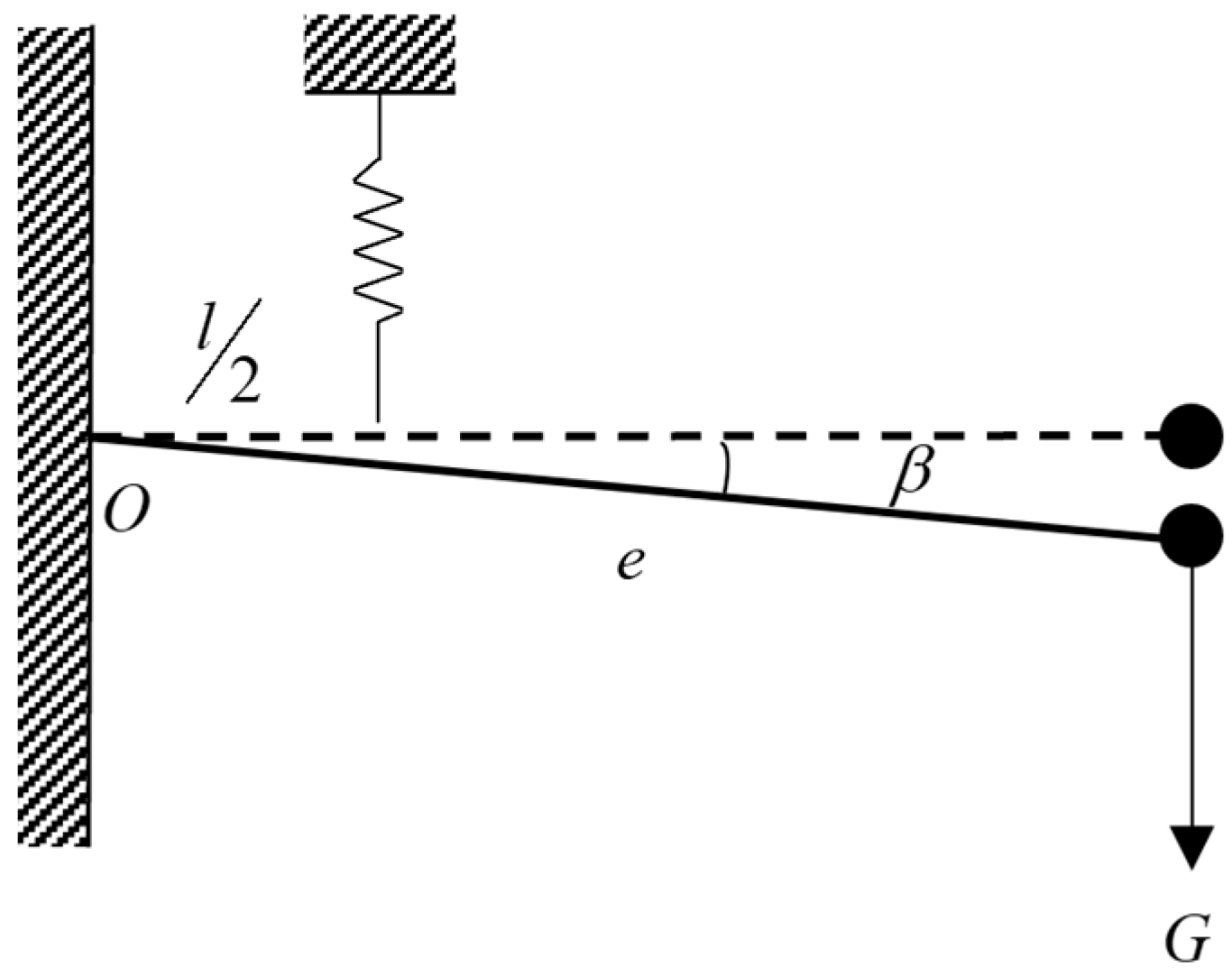
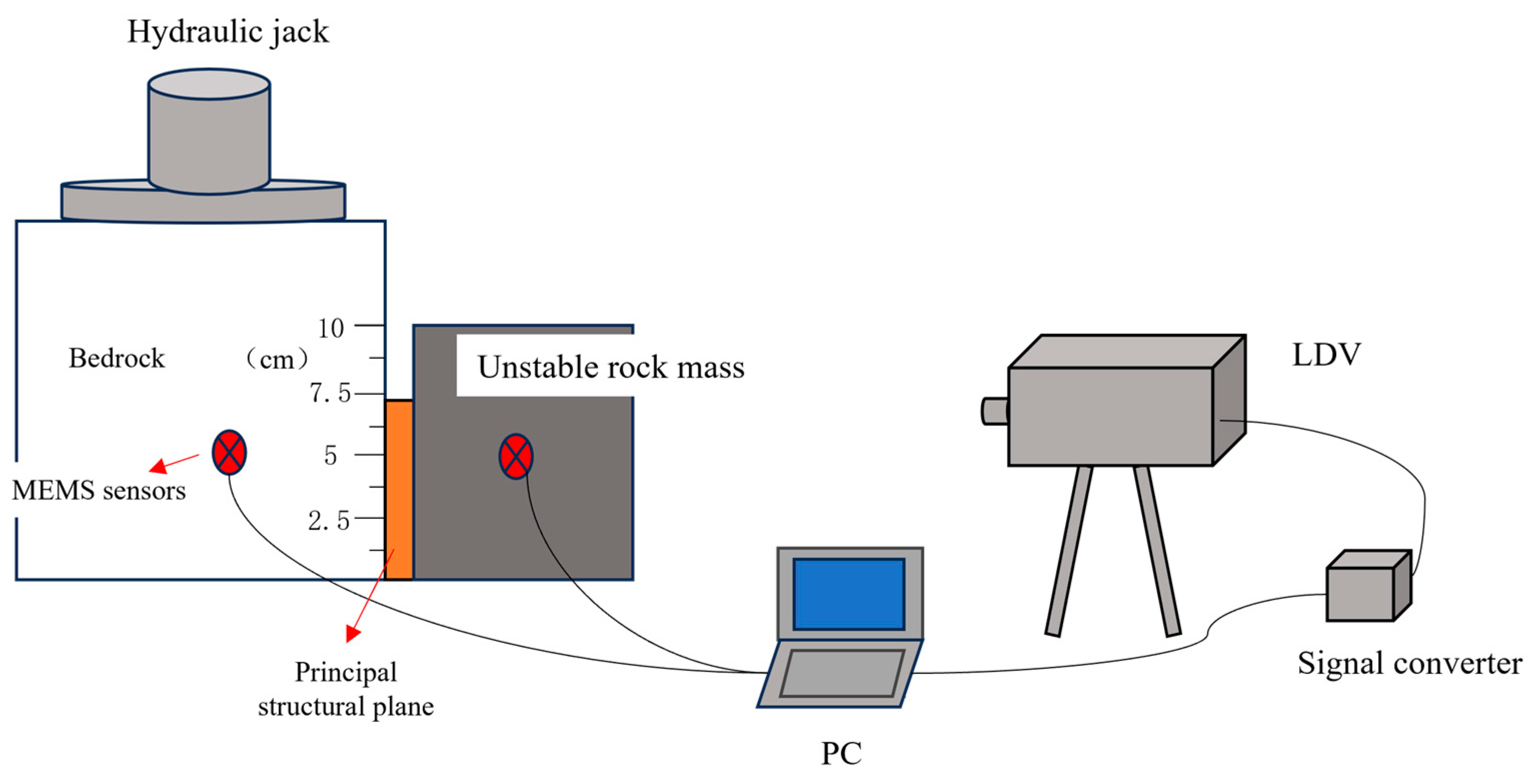
3.1. Experimental Setup and Modeling
3.1.1. Rockfall Model
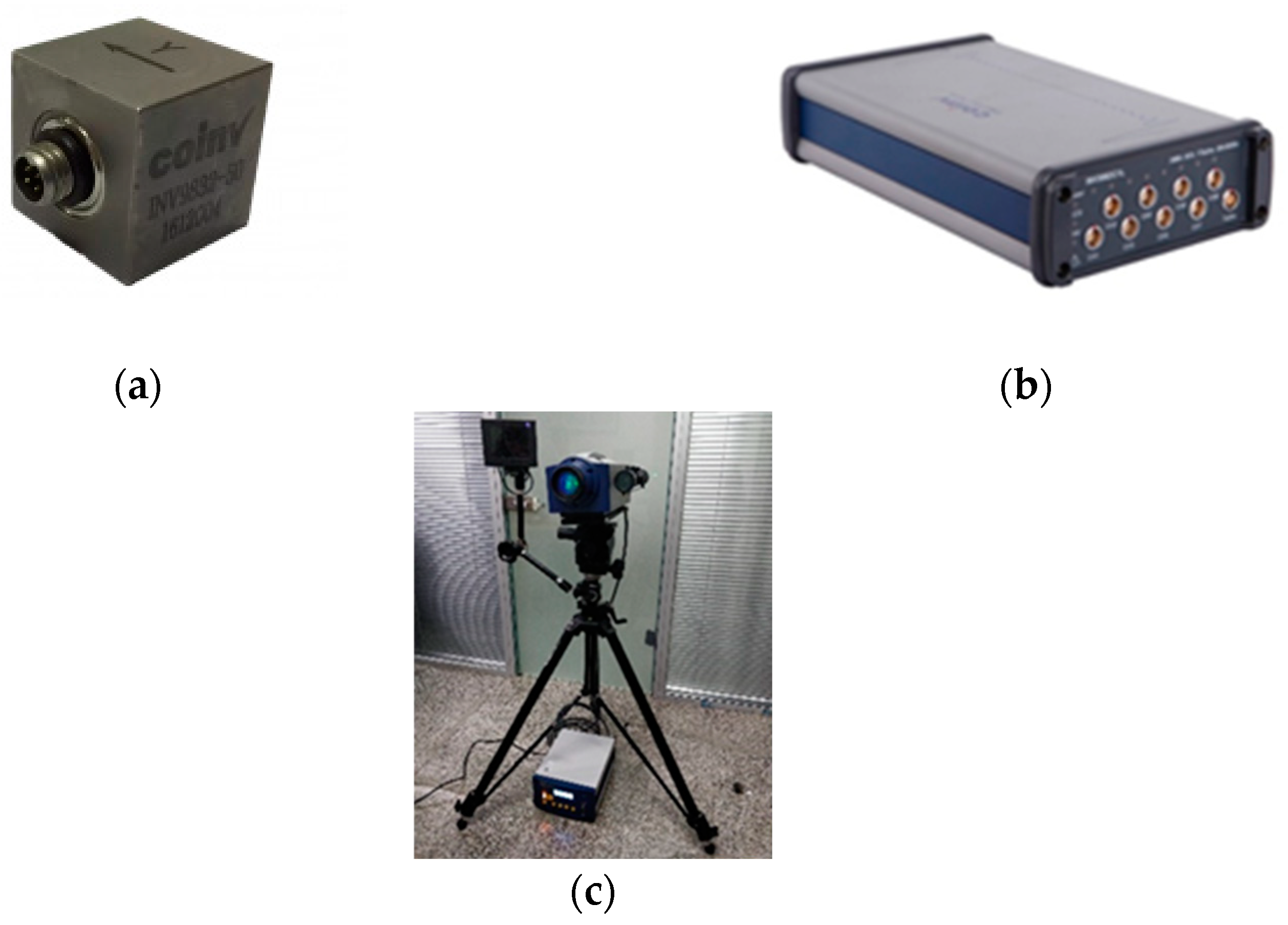
3.1.2. Data Sensing Instrumentation
3.1.3. Dynamic Simulation of Collapse Mechanisms
3.2. Experimental Results
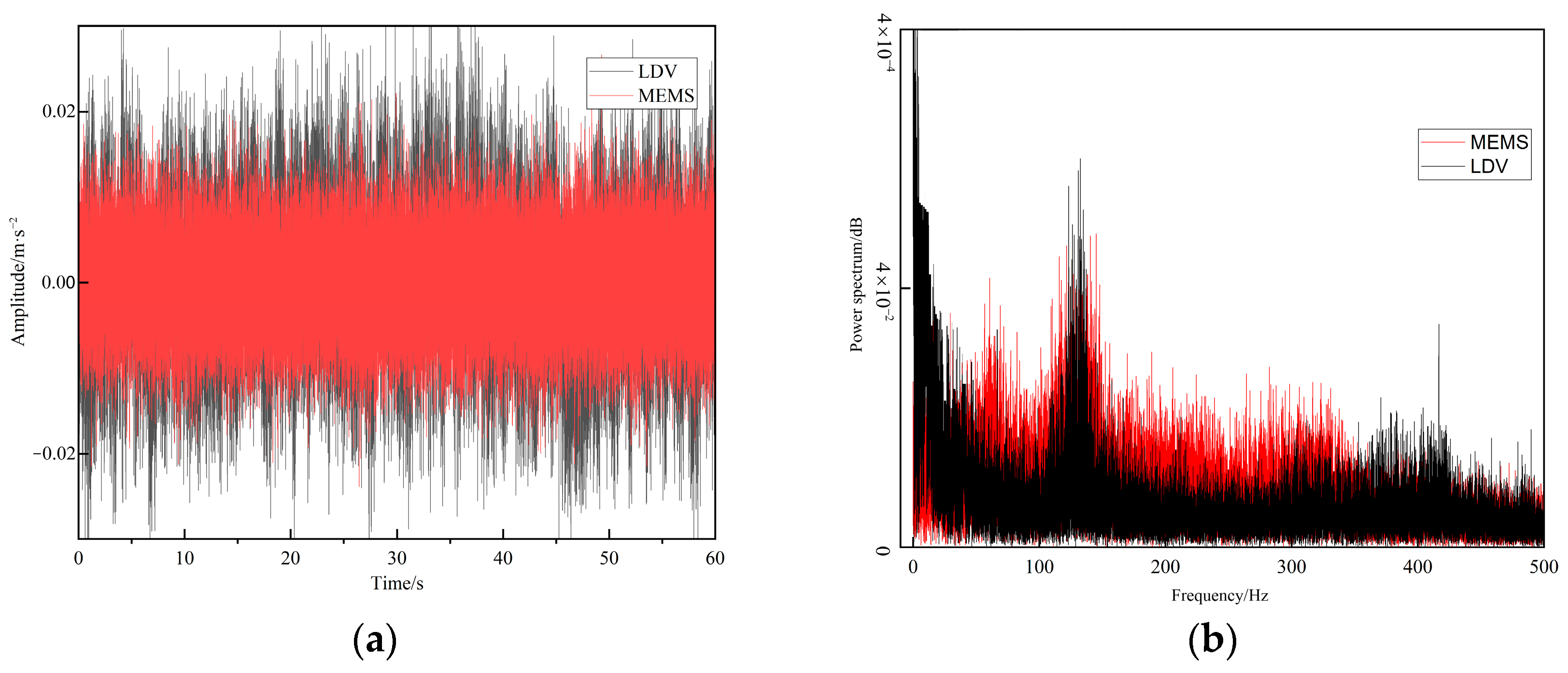
3.2.1. MEMS-Laser Vibrometry Cross-Validation
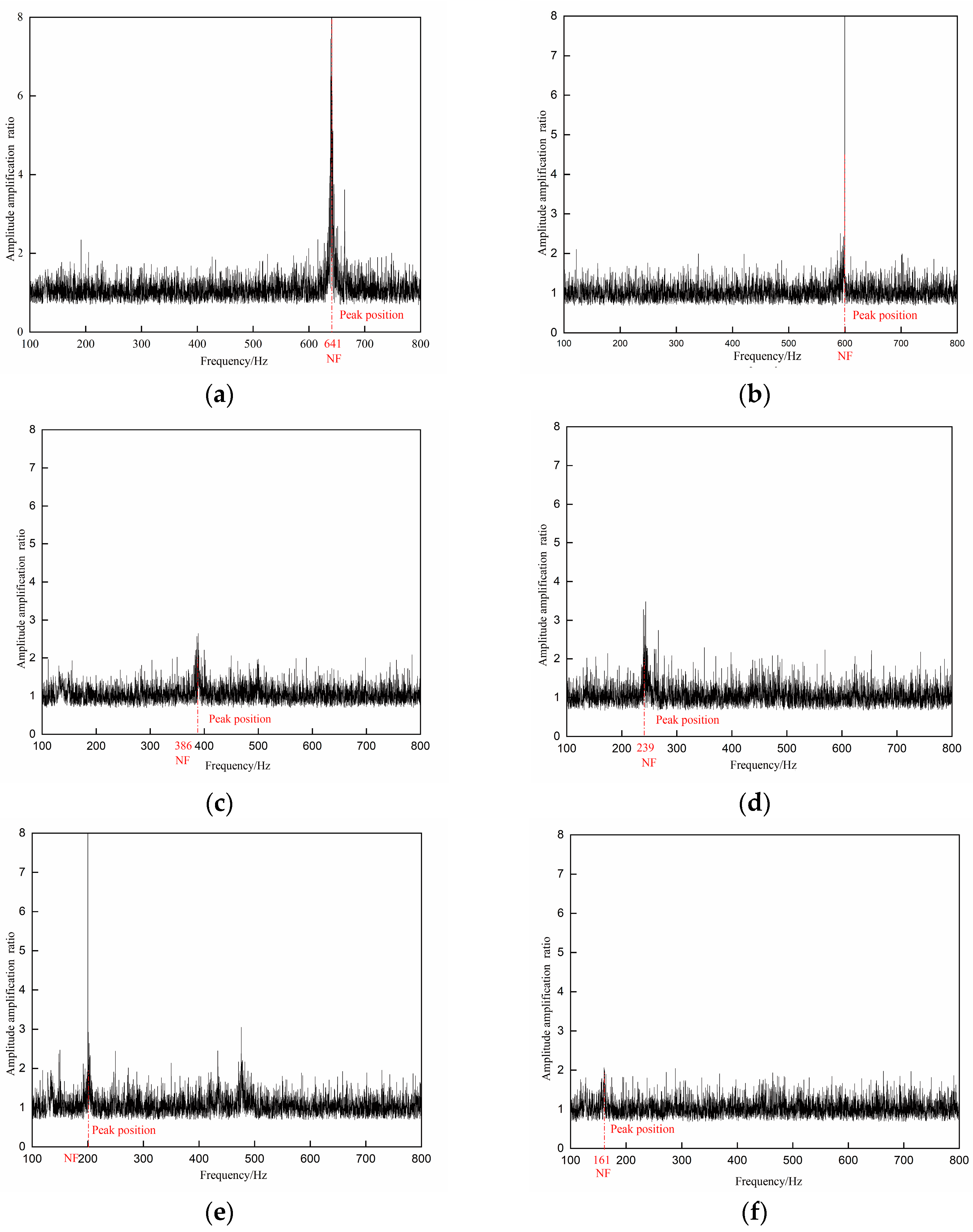
3.2.2. Correlation Analysis of Stability and NF
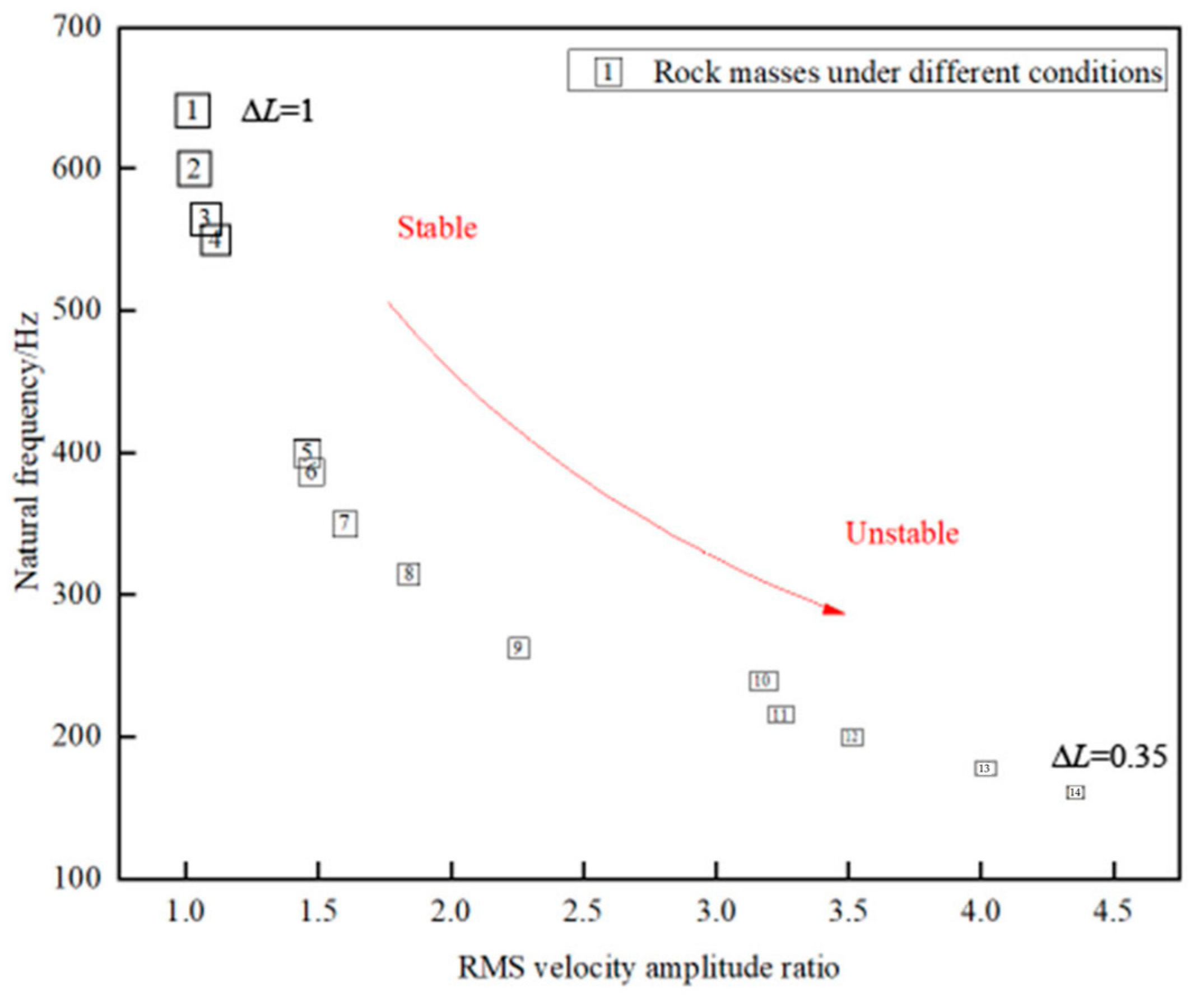
3.2.3. Correlation Analysis of Stability and RMS-VAR
4. Discussion
4.1. Dual-Indicator Stability Evaluation Model of Unstable Rock Mass
4.2. MEMS-Based Monitoring and Early Warning System
5. Conclusions
- (1)
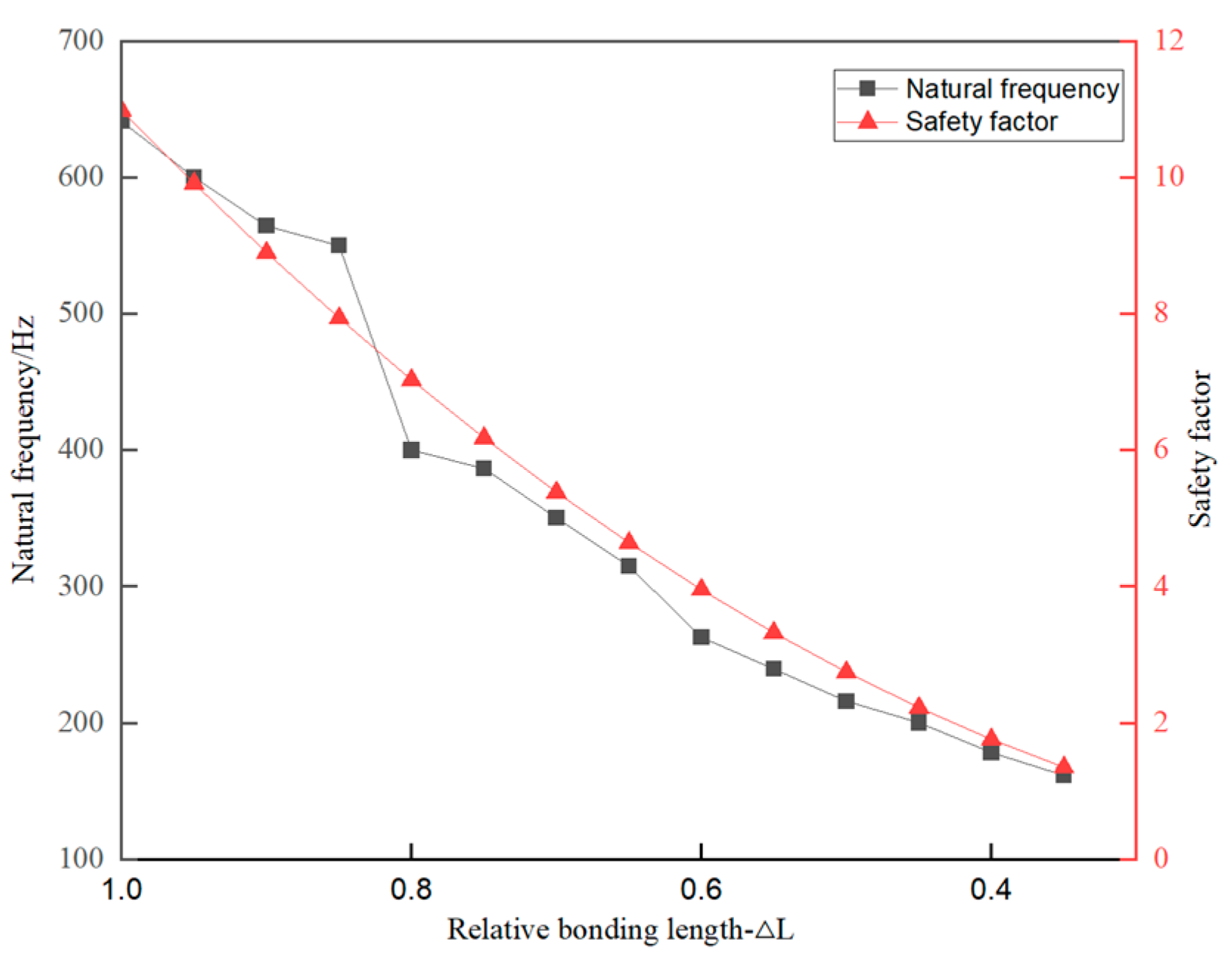
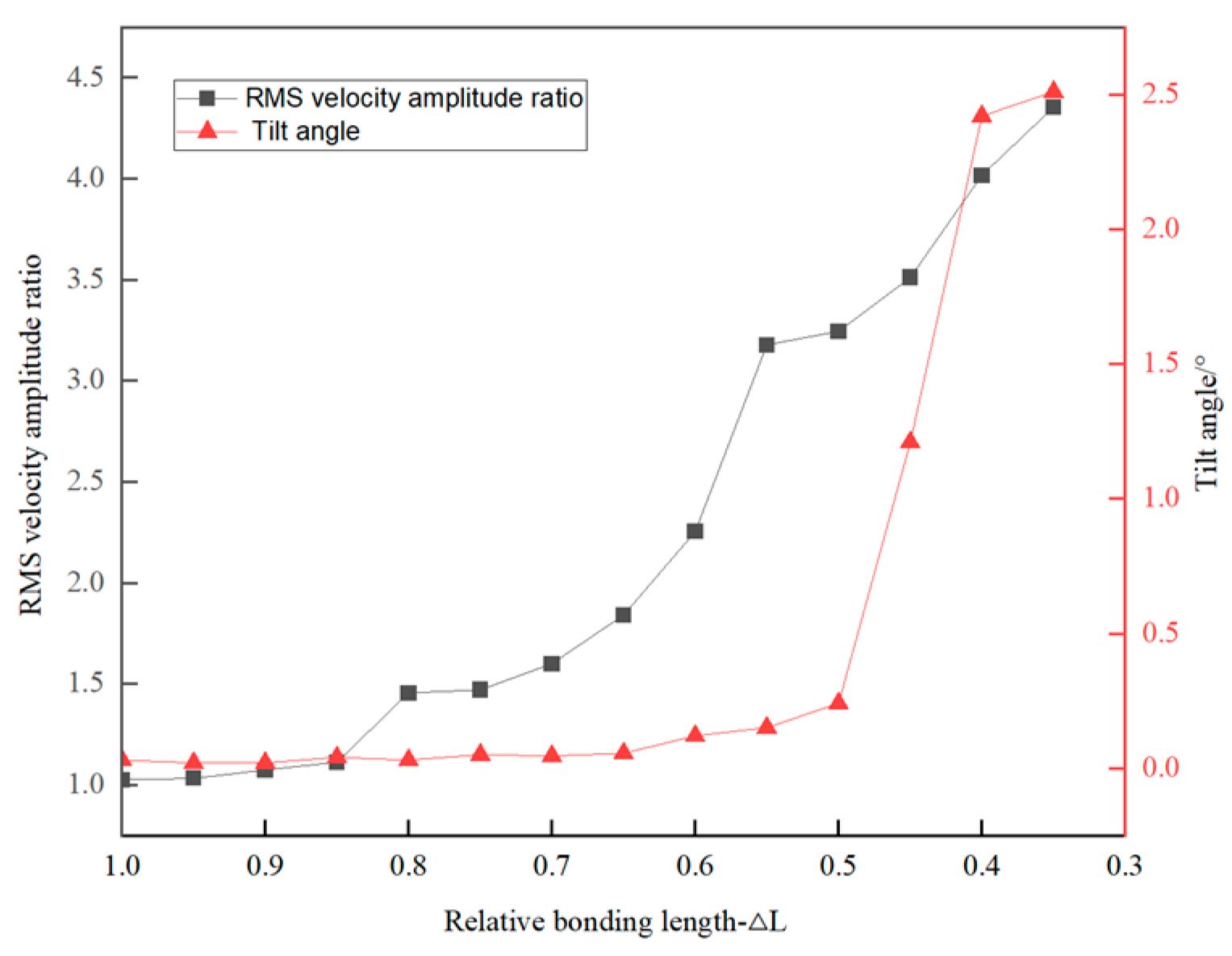
- The critical structural plane length governs stability thresholds, with NF and RMS-VAR serving as effective proxies for fracture evolution. The experimental data demonstrate an inverse correlation between bonding plane length and NF, while RMS-VAR exhibit positive scaling with crack propagation rates.
- (2)
- MEMS sensing can accurately obtain the NF of unstable rock masses and the RMS-VAR, and can reflect the stable state of unstable rock masses in real time. The NF of unstable rock masses shows a 4:3 proportionality ratio to the limit equilibrium safety factor, and the change amplitude of RMS-VAR is three times that of the tilt angle.
- (3)
- Field implementation requires the integration of MEMS edge nodes, cloud-based analytics, and adaptive signal processing algorithms. This method provides a reliable technical guideline for rock mass monitoring in practical engineering and proposes a new concept for similar geological disaster monitoring and early warning.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| MEMS | Micro-Electro-Mechanical System |
| NF | Natural Frequency |
| RMS-VAR | Root Mean Square Velocity Amplitude Ratio |
| LDV | Laser Doppler Vibrometer |
| SDOF | Single Degrees of Freedom |
| PCA | Principal Component Analysis |
| FRF | Frequency Response Function |
References
- Luo, G.; Cheng, Q.; Shen, W.; Ling, S.; Zhang, X.; Zou, P.; Zhao, Y. Research status and development trend of high energy rockfalls. Earth Sci. 2022, 47, 913–934. [Google Scholar] [CrossRef]
- Du, Y.; Xie, M.W.; Jiang, Y.J.; Chen, C.; Jia, B.L.; Huo, L.C. Rock mass collapse disaster formation mechanism and early warning research review. J. Met. Mine 2021, 1, 106–119. [Google Scholar] [CrossRef]
- Iannucci, R.; Martino, S.; Paciello, A.; D’Amico, S.; Galea, P. Investigation of cliff instability at Għajn Ħadid Tower (Selmun Promontory, Malta) by integrated passive seismic techniques. J. Seismol. 2020, 24, 897–915. [Google Scholar] [CrossRef]
- Bottelin, P.; Baillet, L.; Larose, E.; Jongmans, D.; Hantz, D.; Brenguier, O.; Cadet, H.; Helmstetter, A. Monitoring rock reinforcement works with ambient vibrations: La Bourne case study (Vercors, France). Eng. Geol. 2017, 226, 136–152. [Google Scholar] [CrossRef]
- Mercerat, E.D.; Payeur, J.B.; Bertrand, E.; Malascrabes, M.; Pernoud, M.; Chamberland, Y. Deciphering the dynamics of a heterogeneous sea cliff using ambient vibrations: Case study of the Sutta-Rocca overhang (southern Corsica, France). Geophys. J. Int. 2020, 224, 813–832. [Google Scholar] [CrossRef]
- Chen, H.K.; Zhou, Y.T.; Tang, H.M. Based on the analysis of sliding type to remove unstable rock mass blasting dynamic stability calculation method. J. Vib. Shock 2014, 33, 31–34+41. [Google Scholar] [CrossRef]
- Chen, H.K.; Zhang, R.G.; Tang, H.M.; Zhao, X.T. Pressure shear type unstable rock mass damage play rushed to study dynamic parameters. J. Vib. Shock 2012, 31, 30–33. [Google Scholar] [CrossRef]
- Taruselli, M.; Arosio, D.; Longoni, L.; Papini, M.; Zanzi, L. Seismic noise monitoring of a small rock block collapse test. Geophys. J. Int. 2021, 224, 207–215. [Google Scholar] [CrossRef]
- Burjánek, J.; Gischig, V.; Moore, J.R.; Fäh, D. Ambient vibration characterization and monitoring of a rock slope close to collapse. Geophys. J. Int. 2018, 212, 297–310. [Google Scholar] [CrossRef]
- Glueer, F.; Mreyen, A.-S.; Cauchie, L.; Havenith, H.-B.; Bergamo, P.; Halló, M.; Fäh, D. Integrating Seismic Methods for Characterizing and Monitoring Landslides: A Case Study of the Heinzenberg Deep-Seated Gravitational Slope Deformation (Switzerland). Geosciences 2024, 14, 28. [Google Scholar] [CrossRef]
- Häusler, M.; Michel, C.; Burjánek, J.; Fäh, D. Fracture Network Imaging on Rock Slope Instabilities Using Resonance Mode Analysis. Geophys. Res. Lett. 2019, 46, 6497–6506. [Google Scholar] [CrossRef]
- Häusler, M.; Michel, C.; Burjánek, J.; Fäh, D. Monitoring the Preonzo Rock Slope Instability Using Resonance Mode Analysis. J. Geophys. Res. Earth Surf. 2021, 126, e2020JF005709. [Google Scholar] [CrossRef]
- Wu, D.; Liang, T.; Yang, Y.; Pei, Q.; Yi, Y.; Wu, J.; Li, D. Experimental study on displacement monitoring of instable highway slope based on MEMS sensors. Front. Earth Sci. 2025, 13, 1541217. [Google Scholar] [CrossRef]
- Praveen, H.M.; Singh, S.P. An investigation into practical implementation of mems sensors for low-speed condition monitoring applications. Exp. Tech. 2025, 49, 1–18. [Google Scholar] [CrossRef]
- Bolla, A.; Paronuzzi, P. Numerical investigation of the pre-collapse behavior and internal damage of an unstable rock slope. Rock Mech. Rock Eng. 2020, 53, 2279–2300. [Google Scholar] [CrossRef]
- Samadi, H.; Farrokh, E. Utilization of rock mass parameters for performance prediction of rock tbms using machine learning algorithms. SRPH J. Fundam. Sci. Technol. 2021, 3, 1–9. [Google Scholar] [CrossRef]
- Chen, H.K.; Wang, S.J.; Chen, J. Theoretical framework of physical evolution of unstable rock mass collapse disaster and disaster outbreak time. J. Chongqing Norm. Univ. 2020, 37, 121–128. [Google Scholar] [CrossRef]
- Colombero, C.; Comina, C.; Vinciguerra, S.; Benson, P.M. Microseismicity of an unstable rock mass: From field monitoring to laboratory testing. J. Geophys. Res. Solid Earth 2018, 123, 1673–1693. [Google Scholar] [CrossRef]
- Liu, X.R.; Guo, X.Y.; Zhou, X.H.; Luo, X.Y.; Wang, H.; Li, P.Y.; Zhou, F.C. Study on macro-meso shear transfixion mechanisms and mechanical properties of shear band-bedrock interfaces of dangerous rock on reservoir bank. Chin. J. Rock Mech. Eng. 2024, 43, 1096–1109. [Google Scholar] [CrossRef]
- He, Z. Study on Instability Prediction Model of Splitting Rock Mass on Slopes; Beijing University of Science and Technology: Beijing, China, 2023. [Google Scholar] [CrossRef]
- Li, B.; Zhao, W.; Miao, Y.; Tian, W.; Liao, W. A method for dynamic parameter identification of an industrial robot based on frequency response function. Int. J. Mech. Syst. Dyn. 2024, 4, 461–471. [Google Scholar] [CrossRef]
- Dahiya, N.; Pandit, K.; Sarkar, S.; Pain, A. Various aspects of rockfall hazards along the mountain roads in India: A systematic review. Indian Geotech. J. 2024. [Google Scholar] [CrossRef]
- Raja, S.; Abhishek, M.; Balegar, N.; Kristharaj, L.; Yeligar, S. Prediction of rockfall from highwall slope in an open cast mine. J. Mines Met. Fuels 2024, 72, 147–163. [Google Scholar] [CrossRef]
- Li, L.Q.; Huang, R.Q. Steep dip bedding slope instability mechanism analysis. J. Eng. Sci. Technol. 2018, 50, 54–63. [Google Scholar] [CrossRef]
- Kang, X.; Huang, L.; Zhang, Y.; Yun, S.; Jiao, B.; Liu, X.; Zhang, J.; Li, Z.; Zhang, H. Wearable Multi-Channel Pulse Signal Acquisition System Based on Flexible MEMS Sensor Arrays with TSV Structure. Biomimetics 2023, 8, 207. [Google Scholar] [CrossRef]
- Jiang, H.; Wang, Y.; Guo, Z.; Zhou, H.; Wu, J.; Li, X. Landslide Displacement Prediction Stacking Deep Learning Algorithms: A Case Study of Shengjibao Landslide in the Three Gorges Reservoir Area of China. Water 2024, 16, 3141. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Density/(kg/m3) | Modulus of Elasticity/GPa | Poisson’s Ratio | Tensile Strength/MPa | Cohesion/MPa |
|---|---|---|---|---|
| 2230.00 | 2.40 | 0.28 | 0.098 | 0.926 |
| Model Number | Frequency Range/kHz | Range | Resolution | Size/mm |
|---|---|---|---|---|
| INV9832-50 | 1~10 | 50 g | 0.01 mg | 19 × 19 |
| RSV-150 | 0~25 | 1 m/s | 0.5 μm/s | 402 × 165 × 145 mm |
| Condition | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| L/cm | 0 | 0.5 | 1 | 1.5 | 2 | 2.5 | 3 | 3.5 | 4 | 4.5 | 5 | 5.5 | 6 | 6.5 |
| 1 | 0.95 | 0.90 | 0.85 | 0.8 | 0.75 | 0.7 | 0.65 | 0.6 | 0.55 | 0.50 | 0.45 | 0.40 | 0.35 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.; Xie, M.; Du, Y.; Zhang, X. Dual-Indicator Micro-Electro-Mechanical System Monitoring Method for Rock Instability Early Warning. Appl. Sci. 2025, 15, 4210. https://doi.org/10.3390/app15084210
Chen C, Xie M, Du Y, Zhang X. Dual-Indicator Micro-Electro-Mechanical System Monitoring Method for Rock Instability Early Warning. Applied Sciences. 2025; 15(8):4210. https://doi.org/10.3390/app15084210
Chicago/Turabian StyleChen, Chen, Mowen Xie, Yan Du, and Xiaoyong Zhang. 2025. "Dual-Indicator Micro-Electro-Mechanical System Monitoring Method for Rock Instability Early Warning" Applied Sciences 15, no. 8: 4210. https://doi.org/10.3390/app15084210
APA StyleChen, C., Xie, M., Du, Y., & Zhang, X. (2025). Dual-Indicator Micro-Electro-Mechanical System Monitoring Method for Rock Instability Early Warning. Applied Sciences, 15(8), 4210. https://doi.org/10.3390/app15084210