
Primary Resonance Analysis of High-Static–Low-Dynamic Stiffness Isolators with Piecewise Stiffness, Viscous Damping, and Dry Friction


Abstract
1. Introduction
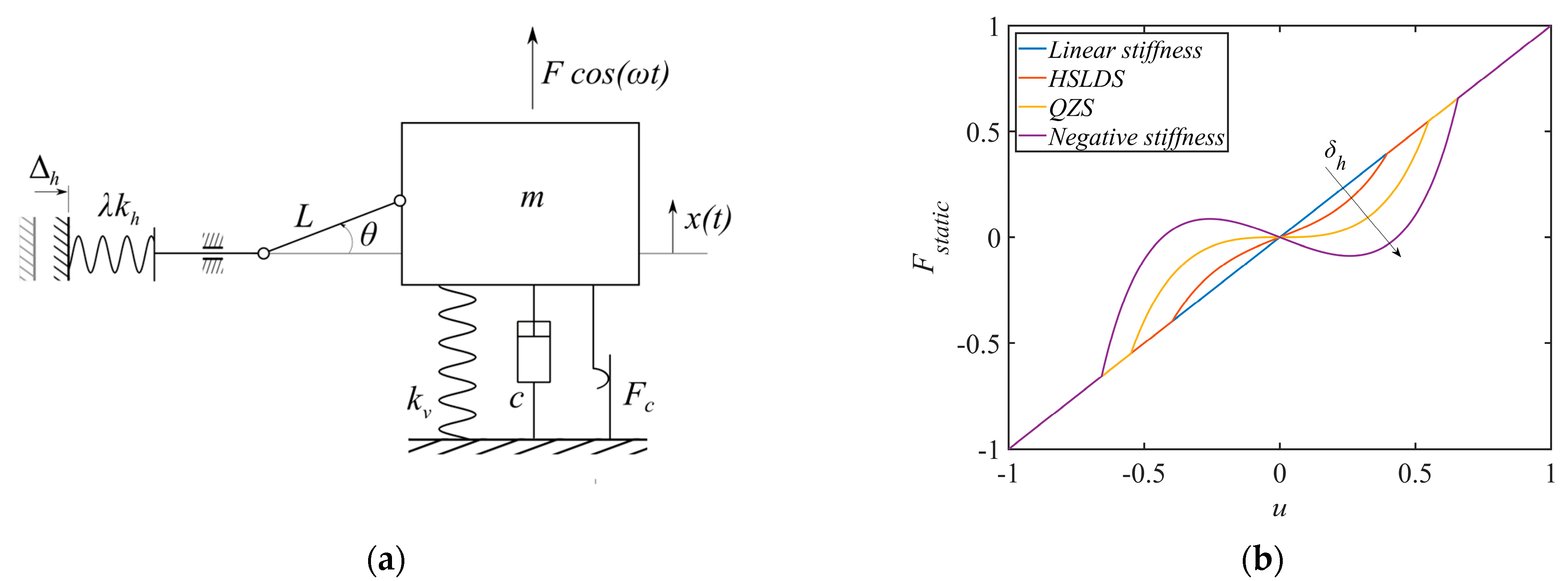
2. Theoretical Formulation
3. Primary Resonance Analysis
3.1. Periodic Motion
- ,
- .
3.2. Stability
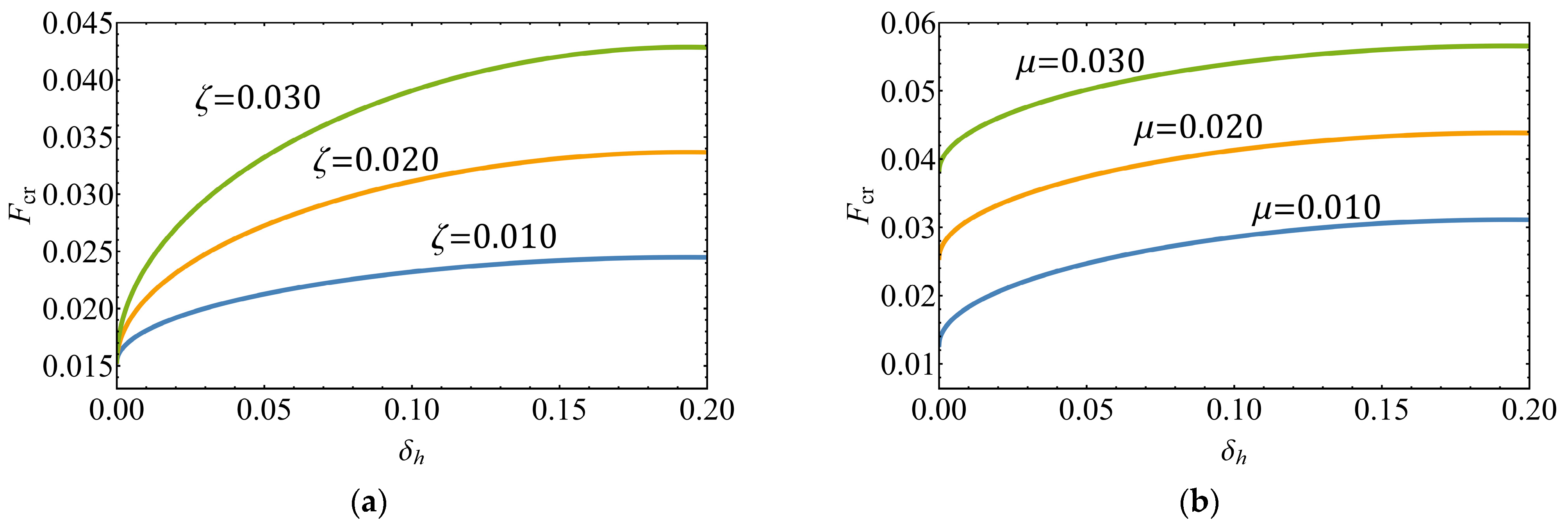
3.3. Critical Forcing Amplitudes Fs and Fcr
4. Results
4.1. Limitations of the First-Order Approximate Solution and Region of Validity
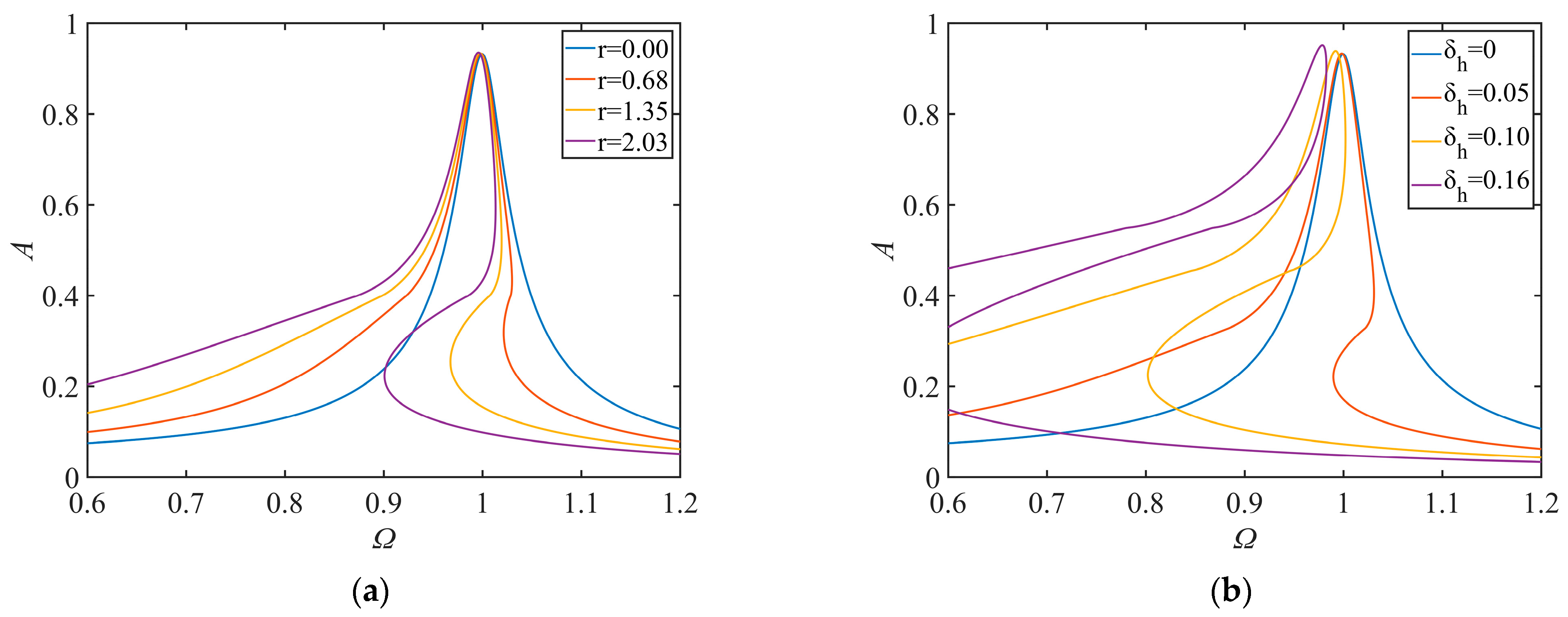
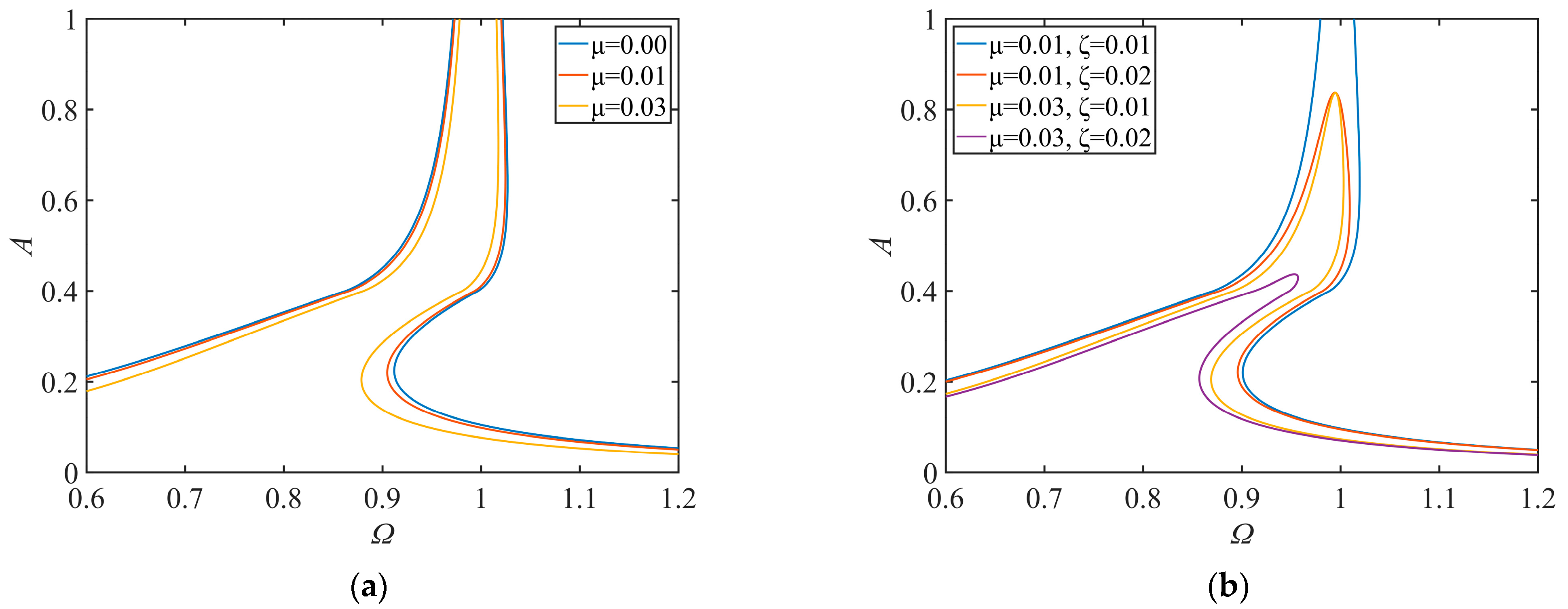
4.2. Parametric Analysis
4.3. Numerical Example
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Carrella, A.; Brennan, M.J.; Waters, T.P. Static Analysis of a Passive Vibration Isolator with Quasi-Zero-Stiffness Characteristic. J. Sound Vib. 2007, 301, 678–689. [Google Scholar] [CrossRef]
- Carrella, A.; Brennan, M.J.; Waters, T.P.; Shin, K. On the Design of a High-Static-Low-Dynamic Stiffness Isolator Using Linear Mechanical Springs and Magnets. J. Sound Vib. 2008, 315, 712–720. [Google Scholar] [CrossRef]
- Carrella, A.; Brennan, M.J.; Waters, T.P.; Lopes, V. Force and Displacement Transmissibility of a Nonlinear Isolator with High-Static-Low-Dynamic-Stiffness. Int. J. Mech. Sci. 2012, 55, 22–29. [Google Scholar] [CrossRef]
- Brennan, M.J.; Kovacic, I.; Carrella, A.; Waters, T.P. On the Jump-up and Jump-down Frequencies of the Duffing Oscillator. J. Sound Vib. 2008, 318, 1250–1261. [Google Scholar] [CrossRef]
- Kovacic, I.; Brennan, M.J.; Waters, T.P. A Study of a Nonlinear Vibration Isolator with a Quasi-Zero Stiffness Characteristic. J. Sound Vib. 2008, 315, 700–711. [Google Scholar] [CrossRef]
- Molyneux, W.G. Supports for Vibration Isolation; Her Majesty’s Stationery Office: London, UK, 1956. [Google Scholar]
- Platus, D.L. Negative-Stiffness-Mechanism Vibration Isolation Systems. In Proceedings of the Process SPIE 1619, Vibration Control in Microelectronics, Optics, and Metrolog, Los Angeles, CA, USA, 4–6 November 1991; pp. 44–54. [Google Scholar]
- Shaw, S.W.; Holmes, P.J. A Periodically Forced Piecewise Linear Oscillator. J. Sound Vib. 1983, 90, 129–155. [Google Scholar] [CrossRef]
- Luo, A.C.J.; Chen, L. Periodic Motions and Grazing in a Harmonically Forced, Piecewise, Linear Oscillator with Impacts. Chaos Solitons Fractals 2005, 24, 567–578. [Google Scholar] [CrossRef]
- Theodossiades, S.; Natsiavas, S. Periodic and Chaotic Dynamics of Motor-Driven Gear-Pair Systems with Backlash. Chaos Solitons Fractals 2001, 12, 2427–2440. [Google Scholar] [CrossRef]
- Shaw, S.W. Forced Vibrations of a Beam with One-Sided Amplitude Constraint: Theory and Experiment. J. Sound Vib. 1985, 99, 199–212. [Google Scholar] [CrossRef]
- Giannini, O.; Casini, P.; Vestroni, F. Experimental Evidence of Bifurcating Nonlinear Normal Modes in Piecewise Linear Systems. Nonlinear Dyn. 2011, 63, 655–666. [Google Scholar] [CrossRef]
- Ji, J.C.; Hansen, C.H. On the Approximate Solution of a Piecewise Nonlinear Oscillator under Super-Harmonic Resonance. J Sound Vib. 2005, 283, 467–474. [Google Scholar] [CrossRef]
- Iarriccio, G.; Zippo, A.; Eskandary-Malayery, F.; Ilanko, S.; Mochida, Y.; Mace, B.; Pellicano, F. Tunable High-Static-Low-Dynamic Stiffness Isolator under Harmonic and Seismic Loads. Vibration 2024, 7, 829–843. [Google Scholar] [CrossRef]
- Narimani, A.; Golnaraghi, M.F.; Jazar, G.N. Sensitivity Analysis of the Frequency Response of a Piecewise Linear System in a Frequency Island. J. Vib. Control 2004, 10, 175–198. [Google Scholar] [CrossRef]
- Zhou, J.; Wang, X.; Xu, D.; Bishop, S. Nonlinear Dynamic Characteristics of a Quasi-Zero Stiffness Vibration Isolator with Cam-Roller-Spring Mechanisms. J. Sound Vib. 2015, 346, 53–69. [Google Scholar] [CrossRef]
- Malatkar, P.; Nayfeh, A.H. Calculation of the Jump Frequencies in the Response of s.d.o.f. Non-Linear Systems. J. Sound Vib. 2002, 254, 1005–1011. [Google Scholar] [CrossRef]
- Yang, J.; Jiang, J.Z.; Neild, S.A. Dynamic Analysis and Performance Evaluation of Nonlinear Inerter-Based Vibration Isolators. Nonlinear Dyn. 2020, 99, 1823–1839. [Google Scholar] [CrossRef]
- Noh, J.; Yoon, Y.J.; Kim, P. Anhysteretic High-Static–Low-Dynamic Stiffness Vibration Isolators with Tunable Inertial Nonlinearity. Nonlinear Dyn. 2024, 112, 2569–2588. [Google Scholar] [CrossRef]
- Stanton, S.C.; Culver, D.; Mann, B.P. Tuning Inertial Nonlinearity for Passive Nonlinear Vibration Control. Nonlinear Dyn. 2020, 99, 495–504. [Google Scholar] [CrossRef]
- Feeny, B.; Guran, A.; Hinrichs, N.; Popp, K. A Historical Review on Dry Friction and Stick-Slip Phenomena. Appl. Mech. Rev. 1998, 51, 321–341. [Google Scholar] [CrossRef]
- Den Hartog, J.P. Forced Vibrations With Combined Coulomb and Viscous Friction. J. Fluids Eng. 1931, 53, 107–115. [Google Scholar] [CrossRef]
- Levitan, E.S. Forced Oscillation of a Spring-Mass System Having Combined Coulomb and Viscous Damping. J. Acoust. Soc. Am. 1960, 32, 1265–1269. [Google Scholar] [CrossRef]
- Pratt, T.K.; Williams, R. Non-Linear Analysis of Stick/Slip Motion. J. Sound Vib. 1981, 74, 531–542. [Google Scholar] [CrossRef]
- Shaw, S.W. On the Dynamic Response of a System with Dry Friction. J. Sound Vib. 1986, 108, 305–325. [Google Scholar] [CrossRef]
- Makris, N.; Constantinou, M.C. Analysis of Motion Resisted by Friction. I. Constant Coulomb and Linear/Coulomb Friction. Mech. Struct. Mach. 1991, 19, 477–500. [Google Scholar] [CrossRef]
- Marino, L.; Cicirello, A.; Hills, D.A. Displacement Transmissibility of a Coulomb Friction Oscillator Subject to Joined Base-Wall Motion. Nonlinear Dyn. 2019, 98, 2595–2612. [Google Scholar] [CrossRef]
- Ravindra, B.; Mallik, A.K. Hard Duffing-Type Vibration Isolator with Combined Coulomb and Viscous Damping. Int. J. Non-Linear Mech. 1993, 28, 427–440. [Google Scholar] [CrossRef]
- Detroux, T.; Noël, J.P.; Virgin, L.N.; Kerschen, G. Experimental Study of Isolas in Nonlinear Systems Featuring Modal Interactions. PLoS ONE 2018, 13, e0194452. [Google Scholar] [CrossRef]
- Habib, G.; Cirillo, G.I.; Kerschen, G. Isolated Resonances and Nonlinear Damping. Nonlinear Dyn. 2018, 93, 979–994. [Google Scholar] [CrossRef]
- Donmez, A.; Cigeroglu, E.; Ozgen, G.O. An Improved Quasi-Zero Stiffness Vibration Isolation System Utilizing Dry Friction Damping. Nonlinear Dyn. 2020, 101, 107–121. [Google Scholar] [CrossRef]
- Gao, X.; Teng, H.D. Dynamics and Nonlinear Effects of a Compact Near-Zero Frequency Vibration Isolator with HSLD Stiffness and Fluid Damping Enhancement. Int. J. Non-Linear Mech. 2021, 128, 103632. [Google Scholar] [CrossRef]
- Nayfeh, A.H.; Balachandran, B. Applied Nonlinear Dynamics: Analytical, Computational, and Experimental Methods; Wiley: Hoboken, NJ, USA, 1995; ISBN 9780471593485. [Google Scholar]
- Sanders, J.A.; Verhulst, F.; Murdock, J. Averaging Methods in Nonlinear Dynamical Systems; Applied Mathematical Sciences; Springer: New York, NY, USA, 2007; ISBN 978-0-387-48916-2. [Google Scholar]
- Krylov, N.M.; Bogoliubov, N.N. Introduction to Non-Linear Mechanics; Princeton University Press: Princeton, NJ, USA, 1950; ISBN 9780691079851. [Google Scholar]
- Bogoliubov, N.N.; Mitropolsky, Y.A. Asymptotic Methods in the Theory of Non-Linear Oscillations; Hindustan Publishing: Delhi, India, 1961. [Google Scholar]
- Zhang, Y.; Cao, Q. The Recent Advances for an Archetypal Smooth and Discontinuous Oscillator. Int. J. Mech. Sci. 2022, 214, 106904. [Google Scholar] [CrossRef]
- Liu, C.; Zhang, W.; Yu, K.; Liu, T.; Zheng, Y. Quasi-Zero-Stiffness Vibration Isolation: Designs, Improvements and Applications. Eng. Struct. 2024, 301, 117282. [Google Scholar] [CrossRef]
- Eskandary-Malayery, F.; Ilanko, S.; Mace, B.; Mochida, Y.; Pellicano, F. Experimental and Numerical Investigation of a Vertical Vibration Isolator for Seismic Applications. Nonlinear Dyn. 2022, 109, 303–322. [Google Scholar] [CrossRef]
- Berger, E.J. Friction Modeling for Dynamic System Simulation. Appl. Mech. Rev. 2002, 55, 535–577. [Google Scholar] [CrossRef]
- Pennestrì, E.; Rossi, V.; Salvini, P.; Valentini, P.P. Review and Comparison of Dry Friction Force Models. Nonlinear Dyn. 2016, 83, 1785–1801. [Google Scholar] [CrossRef]
- Abolfathi, A.; Brennan, M.J.; Waters, T.P.; Tang, B. On the Effects of Mistuning a Force-Excited System Containing a Quasi-Zero-Stiffness Vibration Isolator. J. Vib. Acoust. 2015, 137, 044502. [Google Scholar] [CrossRef]
- Mitropolskii, Y.A.; Van Dao, N. Applied Asymptotic Methods in Nonlinear Oscillations; Solid Mechanics and Its Applications; Springer: Dordrecht The Netherlands, 1997; ISBN 978-90-481-4865-3. [Google Scholar]
- Kovacic, I.; Brennan, M.J. The Duffing Equation: Nonlinear Oscillators and Their Behaviour; Kovacic, I., Brennan, M.J., Eds.; Wiley: Hoboken, NJ, USA, 2011; ISBN 9780470715499. [Google Scholar]
- Mickens, R.E. Truly Nonlinear Oscillations: Harmonic Balance, Parameter Expansions, Iteration, and Averaging Methods; World Scientific: Singapore, 2010; ISBN 978-981-4291-65-1. [Google Scholar]
- Schmidt, G.; Tondl, A. Non-Linear Vibrations; Cambridge University Press: Cambridge, UK, 1986; ISBN 9780521266987. [Google Scholar]
- Griffiths, L.W. Introduction to the Theory of Equations; Wiley & Sons: New York, NY, USA, 1947. [Google Scholar]
- Kim, W.-J.; Perkins, N.C. Harmonic Balance/Galerkin Method for Non-Smooth Dynamic Systems. J. Sound Vib. 2003, 261, 213–224. [Google Scholar] [CrossRef]
- Schreyer, F.; Leine, R.I. A Mixed Shooting Harmonic Balance Method for Unilaterally Constrained Mechanical Systems. Arch. Mech. Eng. 2016, 63, 297–314. [Google Scholar] [CrossRef]
- Colaïtis, Y.; Batailly, A. The Harmonic Balance Method with Arc-Length Continuation in Blade-Tip/Casing Contact Problems. J. Sound Vib. 2021, 502, 116070. [Google Scholar] [CrossRef]
- Bandstra, J.P. Comparison of Equivalent Viscous Damping and Nonlinear Damping in Discrete and Continuous Vibrating Systems. J. Vib. Acoust. Stress Reliab. Des. 1983, 105, 383. [Google Scholar] [CrossRef]
- Shampine, L.; Reichelt, M. The MATLAB ODE Suite. SIAM J. Sci. Comput. 1997, 18, 1–22. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Jump-Up | Jump-Down | |||
|---|---|---|---|---|
| - | - | - | - | |
| 0.025 | 0.8023 | 0.1722 | 0.8318 | 0.2893 |
| 0.8287 | 0.1842 | 0.9288 | ||
| 0.040 | 0.8672 | 0.2052 | 0.9938 | 0.5536 |
| 0.050 | 0.8976 | 0.2222 | 1.0175 | 0.5876 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Iarriccio, G. Primary Resonance Analysis of High-Static–Low-Dynamic Stiffness Isolators with Piecewise Stiffness, Viscous Damping, and Dry Friction. Appl. Sci. 2025, 15, 4187. https://doi.org/10.3390/app15084187
Iarriccio G. Primary Resonance Analysis of High-Static–Low-Dynamic Stiffness Isolators with Piecewise Stiffness, Viscous Damping, and Dry Friction. Applied Sciences. 2025; 15(8):4187. https://doi.org/10.3390/app15084187
Chicago/Turabian StyleIarriccio, Giovanni. 2025. "Primary Resonance Analysis of High-Static–Low-Dynamic Stiffness Isolators with Piecewise Stiffness, Viscous Damping, and Dry Friction" Applied Sciences 15, no. 8: 4187. https://doi.org/10.3390/app15084187
APA StyleIarriccio, G. (2025). Primary Resonance Analysis of High-Static–Low-Dynamic Stiffness Isolators with Piecewise Stiffness, Viscous Damping, and Dry Friction. Applied Sciences, 15(8), 4187. https://doi.org/10.3390/app15084187