1. Introduction
The construction industry is characterized by demanding physical labor, requiring workers to carry heavy materials, perform repetitive bending and standing motions, and assemble structures at elevated heights—tasks that impose significant physical strain [
1,
2,
3,
4,
5,
6,
7,
8]. These physical demands contribute substantially to worker fatigue and musculoskeletal injuries, which in turn lead to reduced work speed, diminished productivity, and increased risk of accidents [
9,
10,
11,
12,
13,
14,
15]. Despite various technological approaches aimed at enhancing construction productivity, many operations remain heavily dependent on manual labor [
16,
17,
18,
19,
20,
21]. Consequently, there is a growing need for assistive technologies that can simultaneously reduce physical strain while improving productivity [
22,
23].
Wearable exoskeletons have emerged as a promising solution to address these challenges [
24,
25,
26,
27,
28]. These robotic systems assist users’ physical movements, reducing muscle fatigue and potentially enhancing work efficiency [
28,
29,
30,
31]. Particularly in construction environments that involve repetitive lower-body movements, wearable robotic exoskeletons are increasingly recognized as effective tools [
32,
33]. These devices supplement lower-body strength, reduce fatigue during heavy material transport and maintain postural stability during prolonged standing work [
34,
35,
36].
Previous studies have examined the potential of wearable robots to reduce physical burden and improve work stability in construction activities. For instance, Cho et al. [
37] experimentally demonstrated that wearable robots can help maintain safer worker postures during construction tasks. Nnaji et al. [
38] analyzed safety factors and potential risks associated with wearable robot usage, discussing how these assistive devices can reduce physical strain while acknowledging that user adaptation and the physical characteristics of the robots influence work efficiency. Ojha et al. [
39] examined the physiological impacts of powered back-support exoskeleton in construction settings.
While these existing studies have shown that wearable robots can contribute to reducing physical burden and improving work safety, there remains a notable gap in quantitative analysis of whether wearable robots directly enhance productivity through increased work output in actual construction environments [
40,
41]. Objective data regarding how much work output increases relative to cost is essential for improving industry’s acceptance of this technology [
42]. Lower-body robotic exoskeletons also represent a promising area for future research, as there remains significant potential for optimizing these systems, specifically for construction applications where workers frequently engage in demanding lower-body movements, such as lifting, carrying, and repetitive bending [
43,
44,
45,
46,
47]. Even though many construction activities involve lower-body movements, such as walking, carrying, and postural adjustments, empirical research on productivity enhancements from lower-body assistive devices in actual construction sites remains limited [
44,
48,
49]. This study gap impedes the assessment of wearable robotic technology’s practical value and the development of industry-optimized solutions.
This study aims to address this research gap by experimentally analyzing the impact of robotic exoskeleton usage on actual work productivity. While previous research has established that wearable robots can effectively reduce workers’ physical burden [
50,
51,
52], this study takes a step further by quantitatively measuring whether robotic exoskeletons increase the volume of completed work within the same time. In addition, this study comprehensively evaluates the practical effects of wearable robots by analyzing their physical stability and ability to maintain balance.
To experimentally assess the impact of robotic exoskeleton usage on construction productivity, this study focuses on three representative construction activities: sack carrying [
53], masonry bricklaying [
54], and scaffolding [
55,
56]. Each activity was performed under both low-intensity and high-intensity conditions, comparing productivity with and without a robotic exoskeleton. For example, in bag carrying tasks, the study compared transport on level ground (low-intensity) versus on an inclined surface (high-intensity). For masonry work, this study contrasted situations where bricks are positioned at hand-level (low-intensity) versus on the ground requiring repeated bending (high-intensity). For scaffolding work, this study examined clamp installation (low-intensity) versus frame installation (high-intensity).
This study makes three primary contributions to evaluating the practical effectiveness of wearable robotic technology. First, it verifies whether robotic exoskeletons can increase work output within the same timeframe, empirically demonstrating that wearable robots can contribute to productivity improvement beyond merely reducing fatigue. Second, using IMU data, it analyzes how robotic exoskeleton usage affects workers’ balanced maintenance and movement stability, showing that wearable robots can enhance physical stability [
57,
58,
59,
60,
61]. Third, it compares the differential effects of robotic exoskeleton according to work intensity (low-intensity vs. high-intensity), assessing whether wearable robots are particularly effective for higher-intensity tasks. Through these contributions, this study aims to empirically demonstrate that wearable robotic technology can serve as a significant tool for enhancing actual construction productivity rather than merely functioning as a supplementary assistive device. Furthermore, the findings are expected to serve as foundational data for examining the applicability of wearable robots across various industries beyond construction, including logistics and manufacturing, where high-intensity physical work is required.
2. Materials and Methods
2.1. Research Framework
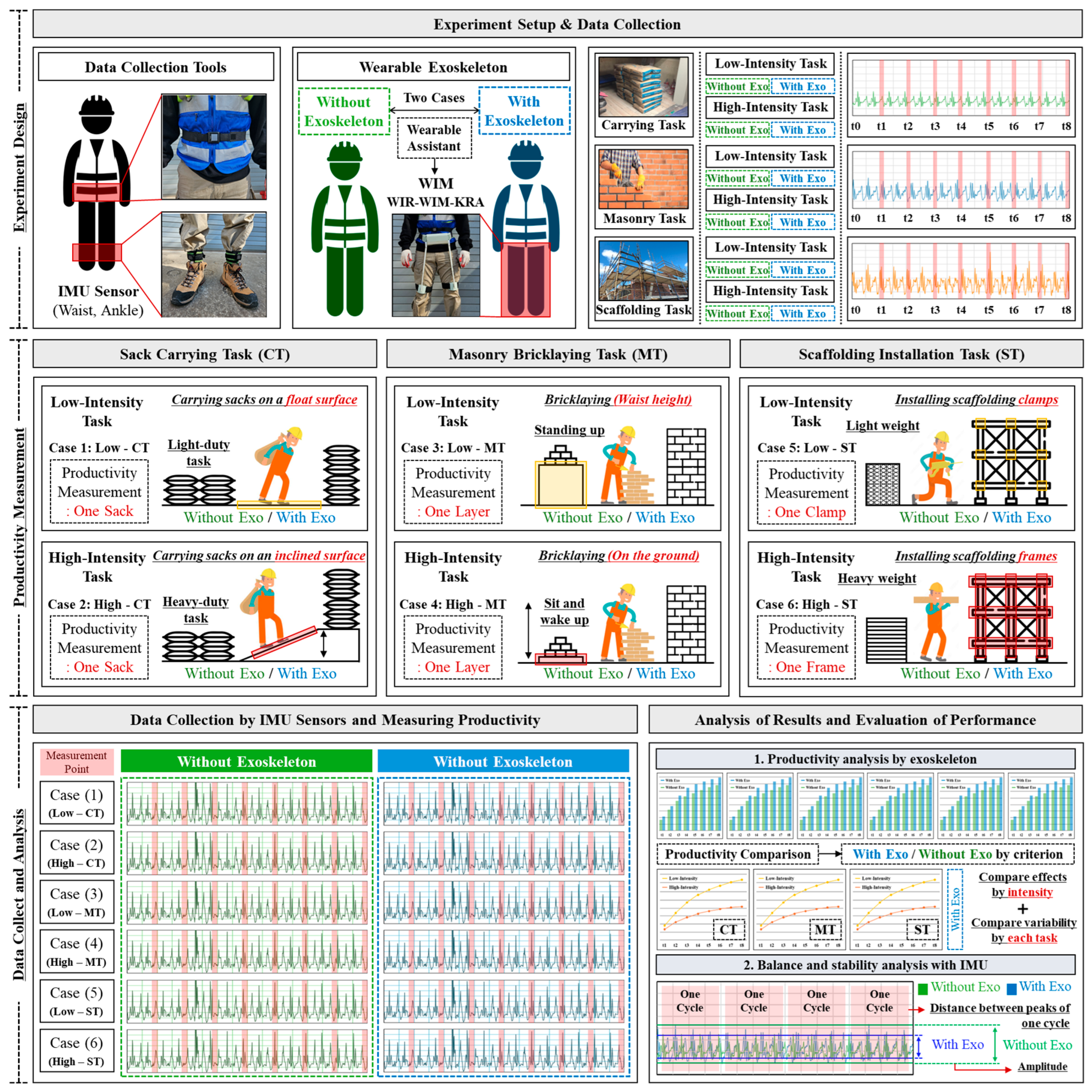
This study employs a systematic experimental approach to evaluate the impact of wearable robotic exoskeleton assistive devices on construction productivity. As illustrated in
Figure 1, the research framework consists of three phases: experiment setup and data collection, task execution with varying conditions, and performance analysis. The experiment utilizes IMU sensors positioned at participants’ waist and ankle to capture movement data, with the WIR-WIM-KRA exoskeleton model serving as the assistive device under investigation.
The experimental design incorporates three representative construction tasks: Sack Carrying Task (CT), Masonry Bricklaying Task (MT), and Scaffolding Installation Task (ST). Each task is performed under both low and high-intensity conditions, and every condition is tested both with and without the exoskeleton, creating a total of twelve experimental cases (six tasks with exoskeleton and six tasks without). This factorial design enables direct productivity comparison between equivalent tasks performed with and without robotic assistance. Standardized measurements based on task-specific outputs (transported sacks, completed masonry layers, and installed scaffolding components) provide quantifiable productivity metrics across all conditions.
The analytical framework evaluates performance through three complementary perspectives to provide a comprehensive assessment of the exoskeleton’s impact. First, direct productivity comparison quantifies work output differences between exoskeleton and non-exoskeleton conditions across all tasks. Second, movement stability analysis utilizing IMU sensor data examines changes in worker motion patterns, cycle consistency, and postural stability. Third, intensity-based performance analysis investigates how the exoskeleton’s effectiveness varies between low and high-intensity tasks, identifying optimal application scenarios. This multi-dimensional approach enables both quantitative productivity assessment and qualitative movement quality evaluation, offering insights into the practical applications of wearable robotic assistance in construction environments.
2.2. Experiment Design
The experiment involved 20 construction workers (18 males, 2 females) aged 25–45 years (mean age = 32.7 ± 5.2 years) with a minimum of 3 years of relevant experience (average experience = 8.4 ± 3.6 years). Participants had diverse backgrounds in construction trades, including masonry (n = 7), general labor (n = 6), carpentry (n = 4), and scaffolding specialists (n = 3). All participants were screened for pre-existing musculoskeletal conditions and reported being in good physical health. All of them underwent a standardized 4 h training session with the WIR-WIM-KRA exoskeleton (Kraków, Poland) before the experiments to ensure proper device usage and familiarity.
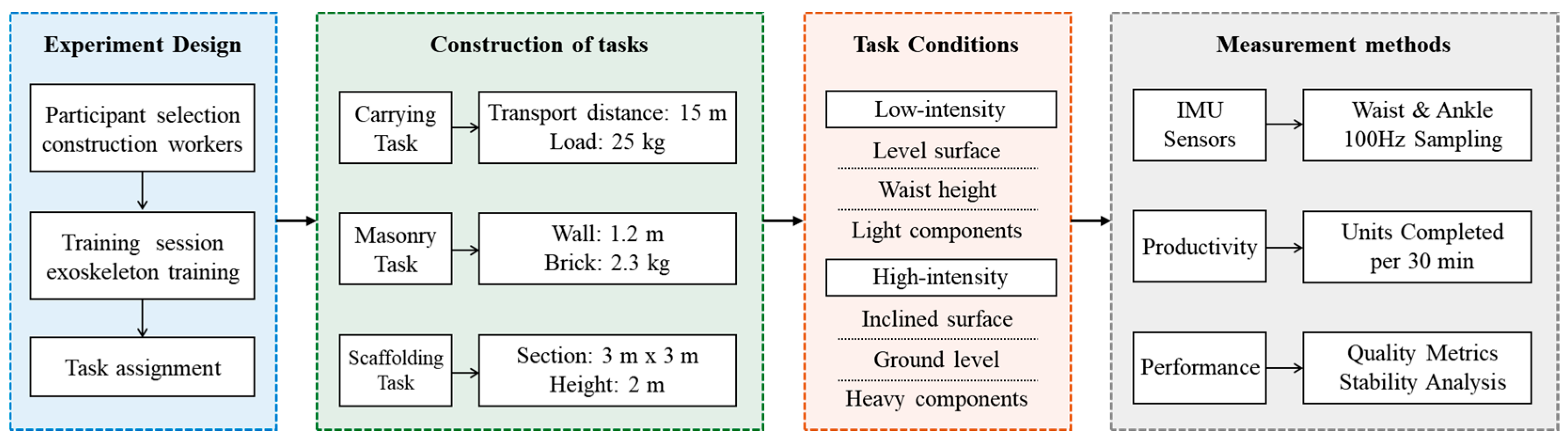
Each construction task was standardized with specific parameters to ensure experimental consistency. The sack carrying task utilized standard 25 kg cement sacks transported over a 15-m distance, with low-intensity conditions on concrete level surfaces and high-intensity conditions on a 20-degree inclined ramp. The masonry bricklaying task employed standard clay bricks (2.3 kg each) for constructing a wall of 1.2 m width with low-intensity conditions starting at waist level (0.9 m) and high-intensity conditions beginning from ground level. The scaffolding installation task involved standard tubular components at 2 m sections, with low-intensity conditions focusing on 0.5 kg clamp installations and high-intensity conditions requiring 15 kg frame assembly within a 3 m × 3 m work area.
Figure 2 shows the experimental framework diagram.
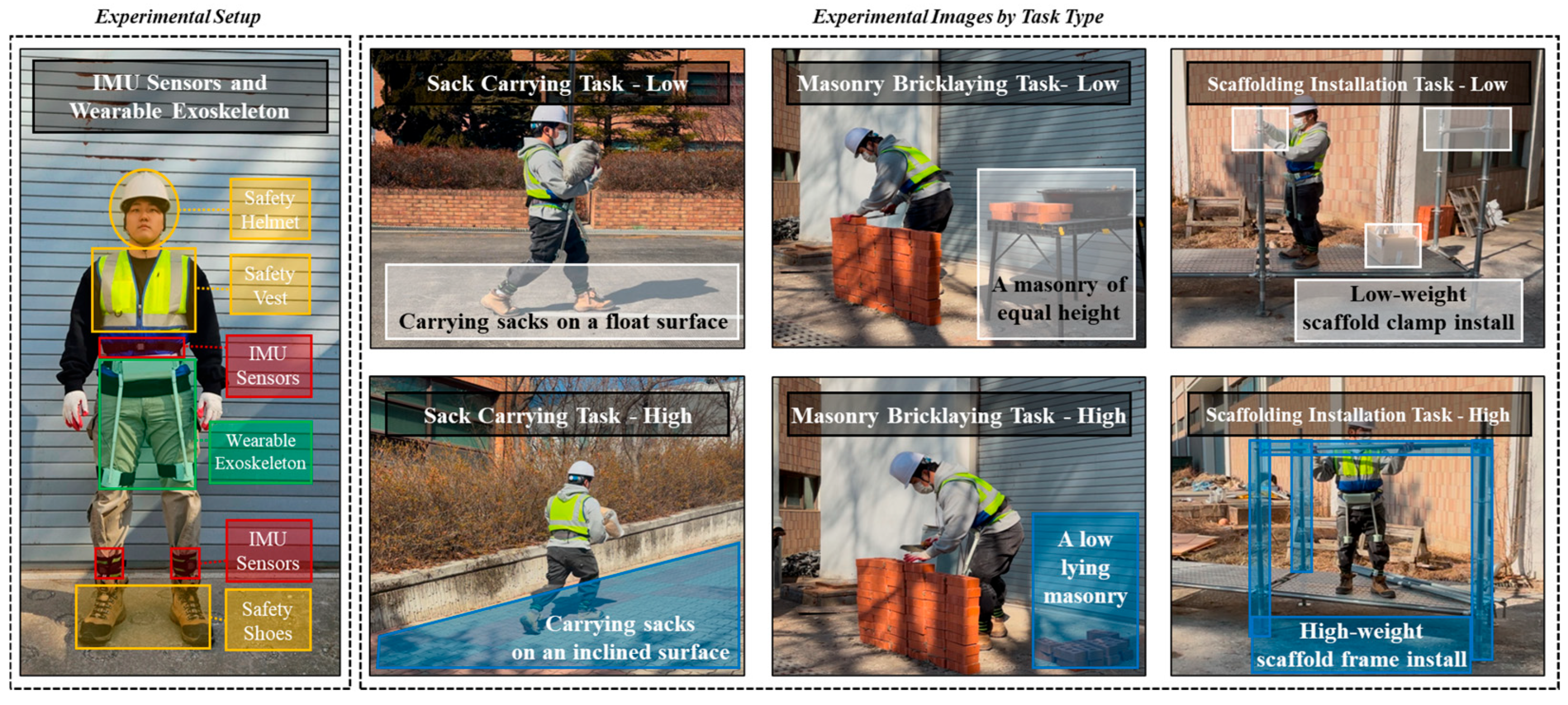
To ensure comprehensive performance evaluation, multiple data collection methods were implemented. IMU sensors, sampling at 100 Hz, were positioned at the L5 vertebra and lateral malleolus to capture detailed movement data. The experimental protocol employed a Latin square design for task order randomization, with participants performing three repetitions of each task condition and maintaining minimum 24 h rest periods between different task types. Performance metrics encompassed productivity measures (task completion rate, work cycle consistency), stability indicators (center of mass displacement, postural sway velocity), and physiological parameters (heart rate variability, perceived exertion ratings). Safety protocols included continuous heart rate monitoring, real-time motion tracking for strain detection, and on-site medical personnel presence during high-intensity tasks.
Figure 3 shows the experimental setup and the experimental images for each task.
2.3. Productivity Measurement
Productivity measurement in this study was designed to capture both quantitative output and qualitative aspects of task performance across the three construction activities. The measurement framework incorporated time-based performance metrics, work cycle analysis, and quality assessment to provide a comprehensive evaluation of the exoskeleton’s impact on worker productivity.
For the sack carrying task (CT), productivity was primarily measured by the number of sacks successfully transported within a standardized 30 min period. Each work cycle was defined as the complete movement sequence from picking up a sack at the starting point to placing it at the designated location. The measurement system tracked not only the total count of transported sacks but also the consistency of movement patterns through IMU sensor data, which provided insights into the efficiency of the worker’s motion and potential fatigue indicators during the task execution.
In the masonry bricklaying task (MT), productivity was evaluated through the number of complete layers accomplished per 30 min period, with each layer requiring precise placement and alignment of bricks. The measurement protocol included automatic timestamping of layer completion and quality checks for horizontal leveling and vertical alignment. Additionally, the temporal patterns of work cycles were analyzed to assess the impact of the exoskeleton on task rhythm and efficiency, particularly focusing on the transition between different working heights and postures.
For scaffolding installation (ST), productivity measurements focused on the number of components (either clamps or frames) successfully installed within 30 min work periods. The measurement system incorporated both installation speed and accuracy metrics, with specific attention to the stability of assembled structures. Work cycle analysis in this task particularly emphasized the coordination between movement and installation actions, as captured by the synchronized IMU sensor data from both waist and ankle positions.
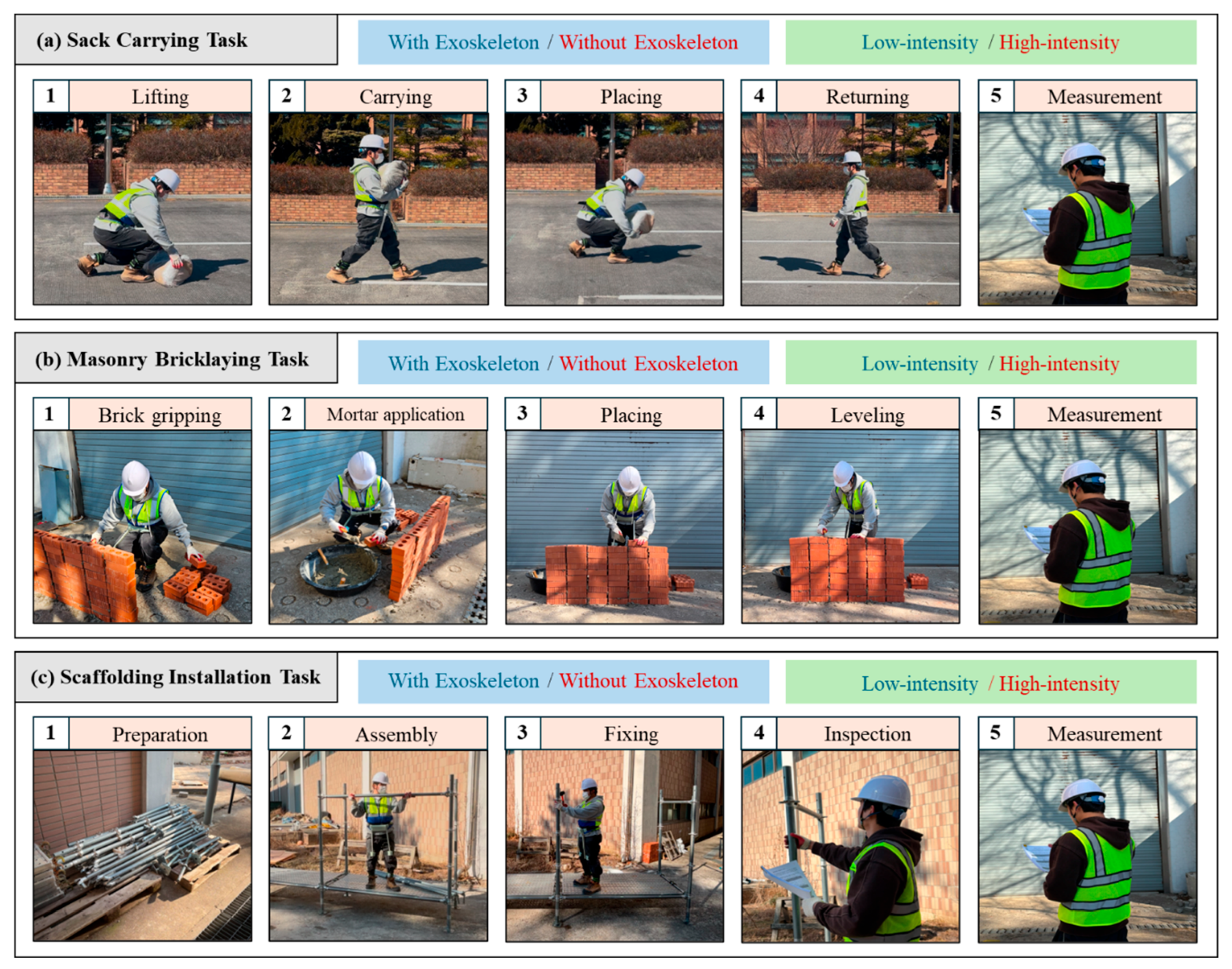
Figure 4 shows the sequential analysis of the work cycle stages of each task.
2.4. Data Collection and Analysis
2.4.1. Sensor-Based Data Acquisition
The primary data collection was conducted through IMU sensors attached to participants’ waist and ankle positions, collecting motion data at a 100 Hz sampling rate. The waist-mounted IMU was used to capture postural stability metrics such as center of mass (COM) displacement and sway area, which are critical for assessing balance maintenance during task execution. The ankle-mounted IMU was utilized to analyze lower limb movement patterns, step cycle characteristics, and temporal consistency across work cycles. This dual-sensor approach enabled comprehensive assessment of both overall body stability and specific movement dynamics throughout task performance. The selection of waist and ankle positions for IMU placement was based on prior studies in construction ergonomics and wearable motion tracking, which have validated these locations as effective for capturing postural sway, center of mass displacement, and step cycle dynamics. The waist-mounted sensor corresponds to the approximate location of the body’s center of mass, making it ideal for postural assessment, while the ankle-mounted sensor is well-suited for lower-limb kinematics and gait-phase detection. Additionally, the sampling frequency of 100 Hz was chosen in accordance with established guidelines in human motion analysis. This rate provides sufficient temporal resolution to detect rapid movement changes in construction tasks, while maintaining efficient data handling and processing.
The collected data included triaxial acceleration and angular velocity measurements, which underwent preprocessing through a low-pass Butterworth filter with a 20 Hz cutoff frequency to remove noise. Task completion data was simultaneously recorded, including the number of units completed (sacks transported, brick layers completed, or scaffolding components installed) and associated quality metrics for each task type.
2.4.2. Productivity and Temporal Analysis
Productivity will be assessed by calculating task completion rates during standardized 30 min periods. For time-dependent analysis, productivity measurements will be taken at 30 min intervals throughout the 2 h work period (0–30, 30–60, 60–90, and 90–120 min). Productivity decline rates will be calculated as percentage changes relative to the initial interval:
The exoskeleton productivity advantage will be computed as the percentage difference between productivity with and without exoskeleton:
2.4.3. Postural Stability Metrics and Computation
Postural stability will be evaluated through several quantitative measures derived from the waist-mounted IMU data. Sway area will be calculated using the convex hull method applied to the horizontal plane projection of the COM trajectory. The calculation for sway area (SA) is
Mean sway velocity (MSV) will be computed as the total path length of the COM trajectory is divided by the measurement duration:
2.4.4. Motion Regularity and Smoothness Metrics
For movement pattern analysis, acceleration profiles are generated by computing the vector magnitude of ankle-mounted IMU data. Cycle identification is performed using peak detection algorithms with a minimum peak prominence threshold of 1.5 g. The movement consistency is assessed through cycle duration coefficient of variation, calculated as:
Movement quality will be further quantified using the normalized jerk metric (NJM) to assess smoothness:
2.4.5. Statistical Analysis
Statistical significance is evaluated using paired
t-tests to compare task completion rates between conditions. Repeated measures ANOVA analyzes interaction effects between factors. Effect sizes are calculated using Cohen’s d formula:
3. Results
3.1. Productivity Analysis
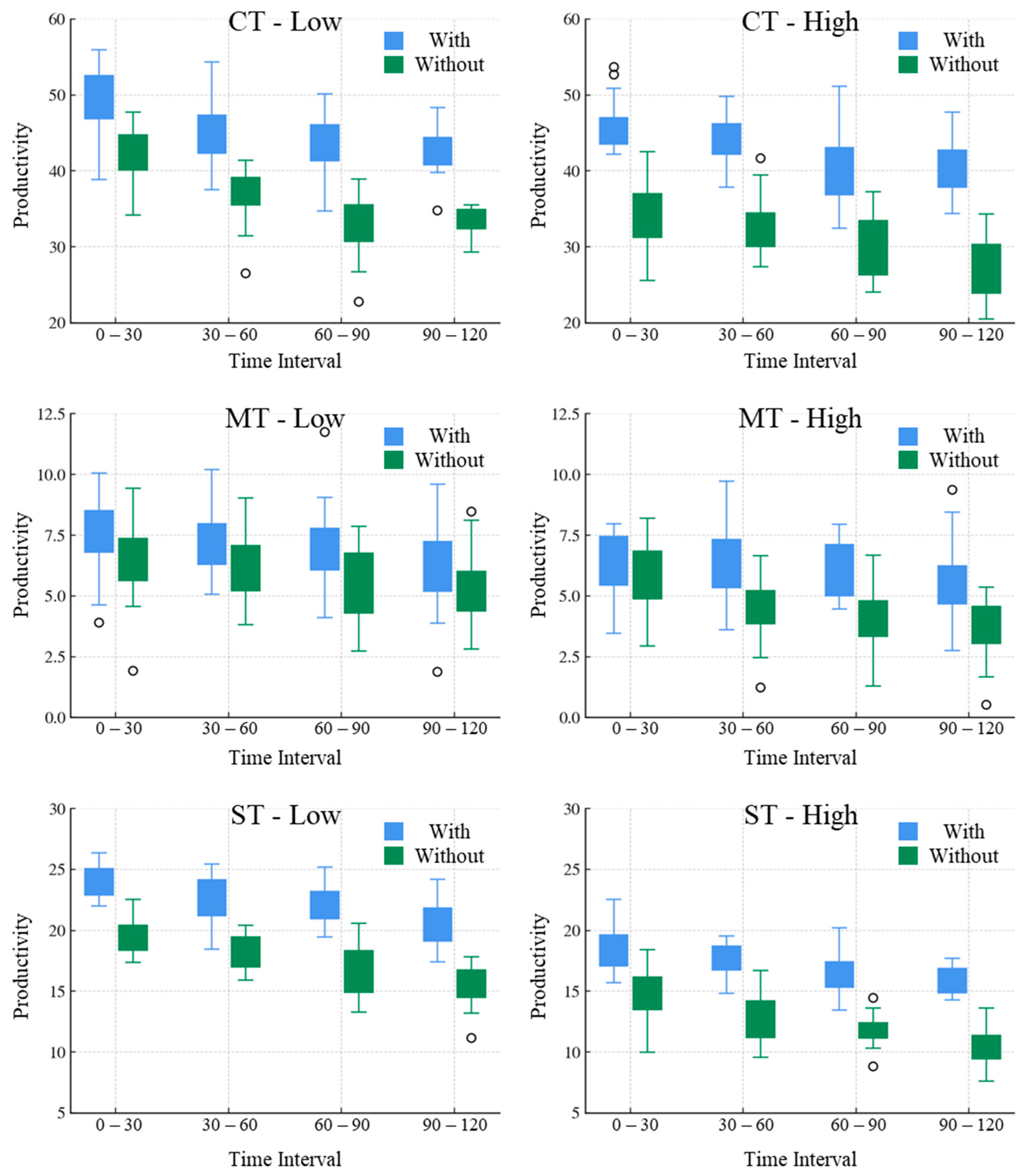
The productivity analysis was conducted over 2 h work periods, with measurements taken at 30 min intervals (0–30, 30–60, 60–90, and 90–120 min). The results represent the average values of 20 participants, each performing tasks under both low-intensity and high-intensity conditions. This averaging of multiple participants’ performance data provides more reliable and statistically significant results while accounting for individual variations in work capacity.
For the sack carrying task (CT), under low-intensity conditions (level surface), the exoskeleton group maintained higher productivity throughout the work period, starting at 48.7 sacks per 30 min and declining to 42.5 sacks in the final interval. The non-exoskeleton group showed a steeper decline from 40.3 to 32.8 sacks. Under high-intensity conditions (inclined surface), the difference was more pronounced, with the exoskeleton group completing 45.2 to 38.6 sacks across intervals, compared to 35.8 to 28.1 sacks without assistance. These decimal values reflect the mean performance across all participants, providing a more precise measure of the overall productivity impact.
In the masonry task (MT), low-intensity conditions (waist-level work) showed consistent benefits from exoskeleton use, with completion rates of 7.8 to 6.9 layers versus 6.5 to 5.1 layers without. High-intensity conditions (ground-level work) demonstrated even greater advantages, with rates of 6.9 to 5.9 layers with the exoskeleton compared to 5.2 to 3.7 layers without indicating substantial fatigue mitigation benefits.
The scaffolding installation task (ST) showed similar patterns. Under low-intensity conditions (clamp installation), average productivity with the exoskeleton ranged from 23.6 to 21.2 components compared to 19.5 to 15.6 without. High-intensity conditions (frame installation) showed rates of 17.8 to 15.3 components with the exoskeleton versus 14.5 to 10.7 without.
Table 1 and
Figure 5 presents detailed measurements across all conditions and time intervals.
To determine the statistical significance of productivity differences between exoskeleton and non-exoskeleton conditions, paired
t-tests were performed for each task type and intensity level. The analysis examined both the overall average productivity and the time-segmented productivity values across the 2 h work period. The results of these statistical analyses are presented in
Table 2.
The paired t-test results revealed highly significant differences (p < 0.001) between exoskeleton and non-exoskeleton conditions across all task types and intensity levels. The highest t-statistic values were observed in high-intensity conditions, particularly for the sack carrying task (t = 19.74) and scaffolding installation task (t = 18.46), indicating that the exoskeleton’s impact was most substantial in these scenarios. The calculated effect sizes (Cohen’s d) ranged from 3.08 to 4.85, representing large effects across all conditions and confirming the practical significance of the productivity improvements.
For the time-segmented analysis, the productivity advantage of exoskeleton use grew more pronounced as the work period progressed. During the first 30 min, the average productivity improvement across all tasks was 20.8% (t = 11.75, p < 0.001) while, in the final 30-min interval, the improvement increased to 29.6% (t = 17.42, p < 0.001). This pattern suggests that the exoskeleton not only enhanced immediate productivity but also provided increasing benefits through fatigue reduction during extended work periods.
Repeated measures ANOVA revealed significant main effects for exoskeleton use (F = 46.3, p < 0.001), task intensity (F = 38.5, p < 0.001), and time intervals (F = 30.2, p < 0.001). This statistical method was chosen for its ability to analyze data where the same participants were measured across multiple conditions while controlling individual variability. Significant interaction effects were observed between exoskeleton use and task intensity (F = 25.7, p < 0.001), and between exoskeleton use and time (F = 17.3, p < 0.01), indicating that the exoskeleton provided greater benefits in high-intensity conditions and helped maintain productivity over extended work periods.
3.2. Work Stability and Movement Pattern
The analysis of work stability and movement patterns was conducted using data collected from IMU sensors positioned at the participants’ waist and ankle locations. These sensors captured triaxial acceleration and angular velocity at a 100 Hz sampling rate, providing detailed insights into body movements and postural dynamics during task execution. This section presents the findings related to motion stability and movement characteristics across different task types and intensity levels.
3.2.1. Postural Stability Analysis
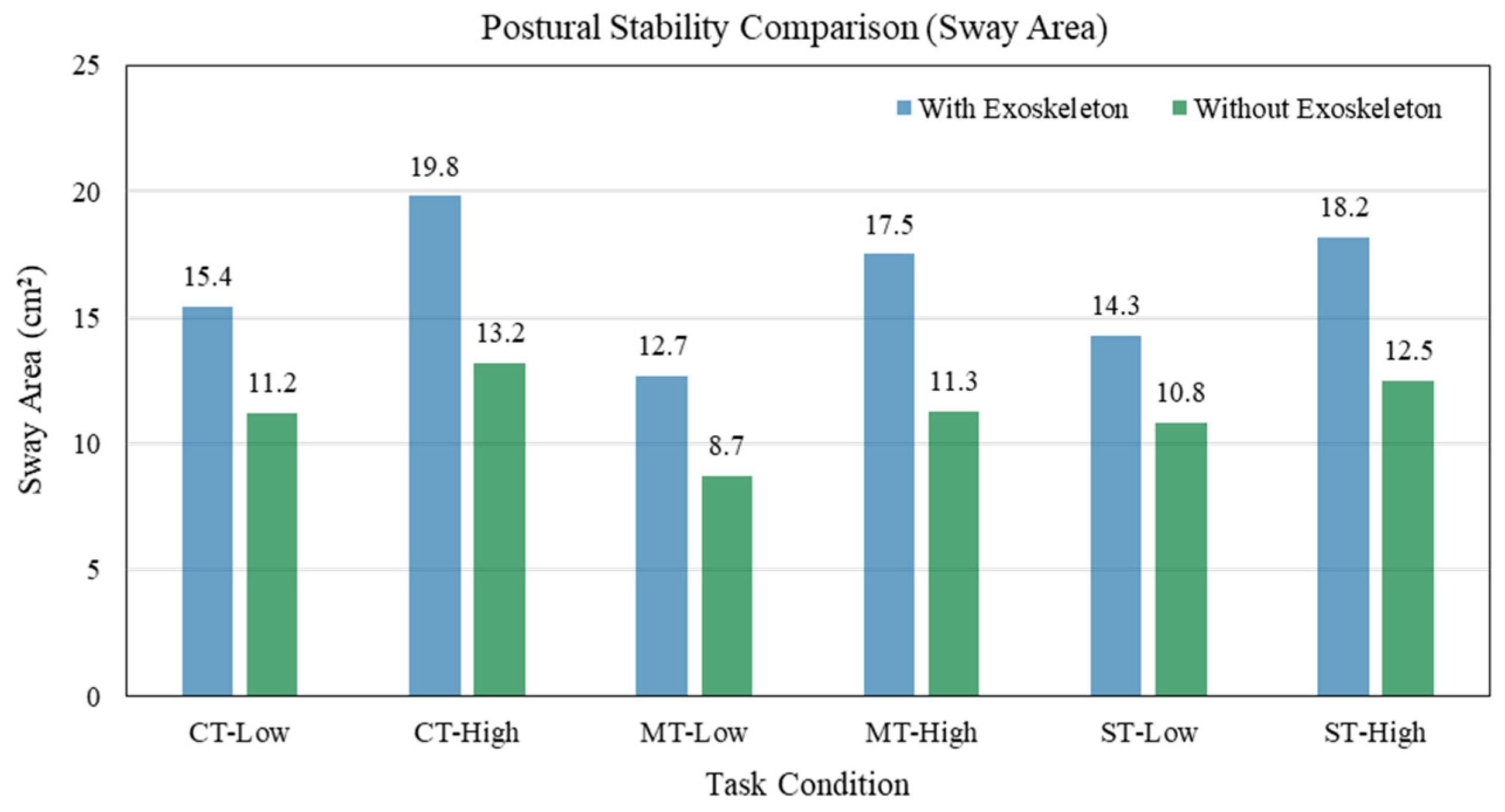
Postural stability was evaluated through the center of mass (COM) displacement metrics derived from the waist-mounted IMU sensors.
Figure 6 illustrates the average sway area for participants during different construction tasks with and without an exoskeleton.
Figure 6 illustrates the comparison of average sway area between conditions with and without the exoskeleton across six different task conditions (CT-Low, CT-High, MT-Low, MT-High, ST-Low, ST-High). The blue bars represent sway area without the exoskeleton, while green bars show sway area when wearing the exoskeleton. A reduction in sway area is observed across all task conditions when using the exoskeleton, with particularly pronounced decreases in high-intensity tasks (CT-High, MT-High, ST-High). This visual representation clearly demonstrates that the exoskeleton enhances workers’ postural stability, with greater benefits observed during more challenging high-intensity tasks.
Analysis of the COM displacement data revealed significant differences in postural stability between exoskeleton and non-exoskeleton conditions. As shown in
Figure 6 and
Table 3, the mean sway area was reduced by 27.3%, 31.5%, and 24.8% for CT, MT, and ST tasks respectively when using the exoskeleton under low-intensity conditions. Under high-intensity conditions, these improvements were even more pronounced, with reductions of 33.3%, 35.4%, and 31.3%, respectively. This reduction in sway area indicates improved stability and balance maintenance during task execution.
Particularly noteworthy was the significant reduction in mean sway velocity across all task conditions when wearing the exoskeleton. The average reduction in sway velocity was 25.0%, 20.0%, and 22.9% for low-intensity CT, MT, and ST tasks, respectively, and increased to 30.9%, 31.7%, and 28.8% for the corresponding high-intensity conditions. These results demonstrate that the exoskeleton provides greater stability benefits during more physically demanding tasks, allowing workers to maintain better control over their movements despite increased workload.
3.2.2. Movement Pattern Analysis
The ankle-mounted IMU sensors provided detailed information on lower limb movement patterns during task execution. Analysis of these movement patterns focused on step cycle characteristics, movement smoothness, and temporal consistency across repeated work cycles for each task type.
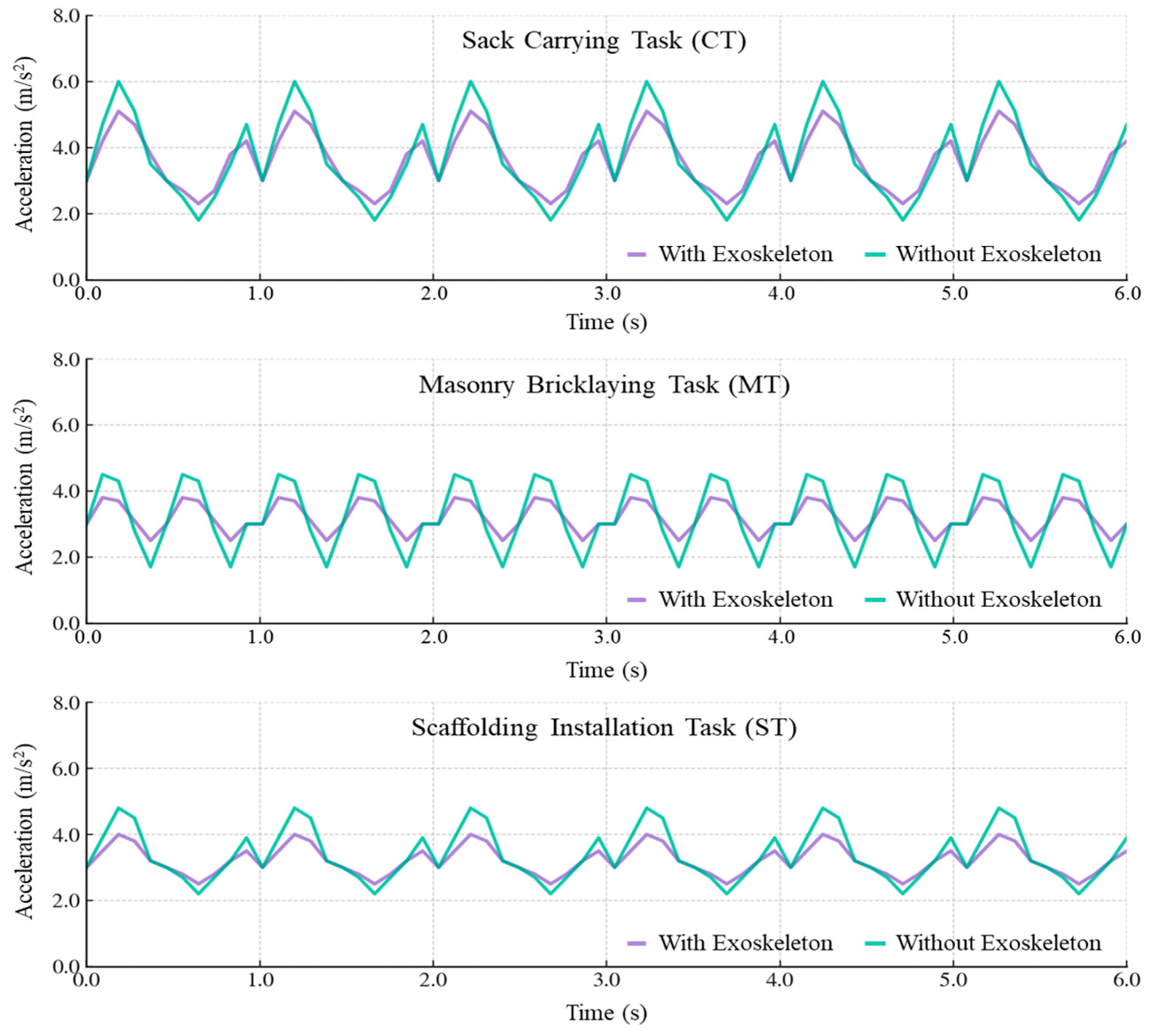
Figure 7 presents the absolute acceleration profiles over multiple work cycles for representative participants in each task condition. The
x-axis represents time in seconds (0–6 s), corresponding to consecutive work cycles, with each cycle representing a complete task sequence. The
y-axis displays acceleration (m/s
2), calculated as the vector sum of triaxial acceleration measured from ankle-mounted IMU sensors. The purple lines represent movement with the exoskeleton, while the green lines indicate movement without the exoskeleton.
Across all tasks, exoskeleton use resulted in lower acceleration peaks and smoother movement patterns compared to working without the device. The cyclical patterns visible in each graph correspond to the repetitive nature of construction tasks, with peaks occurring during dynamic movement phases and valleys during transitions. Notably, the acceleration peaks observed in the green lines (without exoskeleton) are significantly higher than those in the purple lines, indicating that exoskeleton use helps mitigate abrupt movements and enables more controlled motion. This visualization emphasizes absolute acceleration values rather than relative patterns, providing a direct comparison of movement intensity across conditions. The results suggest that exoskeleton use enhances movement consistency and stability while reducing the overall impact forces experienced during construction tasks.
A key finding from the movement pattern analysis was the increased temporal consistency when wearing the exoskeleton. As shown in
Table 4, the coefficient of variation (CV) for work cycle duration decreased substantially across all tasks when using the exoskeleton, indicating more consistent and predictable movement patterns.
For the sack carrying task (CT), the cycle duration CV decreased from 12.8% to 8.5% in low-intensity conditions and from 15.3% to 9.2% in high-intensity conditions when wearing the exoskeleton, representing improvements of 33.6% and 39.9%, respectively. The upper graph in
Figure 7 clearly shows that the peaks in acceleration (particularly at the “High” points) were attenuated with exoskeleton use, suggesting improved control during the carrying phase of the task.
In the masonry task (MT), movement patterns showed distinctive improvements during the repetitive bending motions required for bricklaying. The cycle duration CV decreased from 10.5% to 7.6% in low-intensity conditions and from 14.2% to 9.3% in high-intensity conditions, improvements of 27.6% and 34.5%, respectively. The middle graph in
Figure 7 illustrates how the exoskeleton helped maintain a more consistent amplitude during the cyclical bending and reaching movements characteristic of masonry work.
For the scaffolding installation task (ST), the exoskeleton provided significant stability benefits, particularly evident in the reduction of cycle duration CV from 11.3% to 8.1% in low-intensity conditions (28.3% improvement) and from 13.9% to 8.9% in high-intensity conditions (36.0% improvement). The bottom graph in
Figure 7 shows more subtle but consistent improvements in movement patterns compared to the other tasks.
The movement smoothness index, calculated as the normalized jerk metric (where higher values indicate smoother movements), showed significant improvements with exoskeleton assistance across all tasks. As detailed in
Table 4, the average improvement in movement smoothness ranged from 26.3% to 41.9% across different tasks and intensities, with high-intensity tasks consistently showing greater improvements. These results suggest that the exoskeleton helped participants maintain more controlled and fluid movements, particularly when performing physically demanding tasks.
Notably, across all measured movement metrics, the improvements were consistently more pronounced in high-intensity conditions compared to low-intensity conditions. This pattern was observed in both cycle duration consistency and movement smoothness, suggesting that the exoskeleton provides the greatest benefits when workers are subjected to more physically demanding tasks. The combined analysis of movement patterns demonstrates that the wearable robotic exoskeleton significantly enhances work stability and movement quality across various construction tasks, with the most substantial benefits observed during high intensity work that place greater physical demands on workers.
3.3. Time-Dependent Performance Analysis
This section examines how productivity and work performance evolved over the 2 h work period. By analyzing the data collected at 30-min intervals (0–30, 30–60, 60–90, and 90–120 min), this study gained insights into the temporal patterns of performance and the sustained impact of the wearable robotic exoskeleton across different tasks and intensity levels.
3.3.1. Temporal Patterns in Productivity
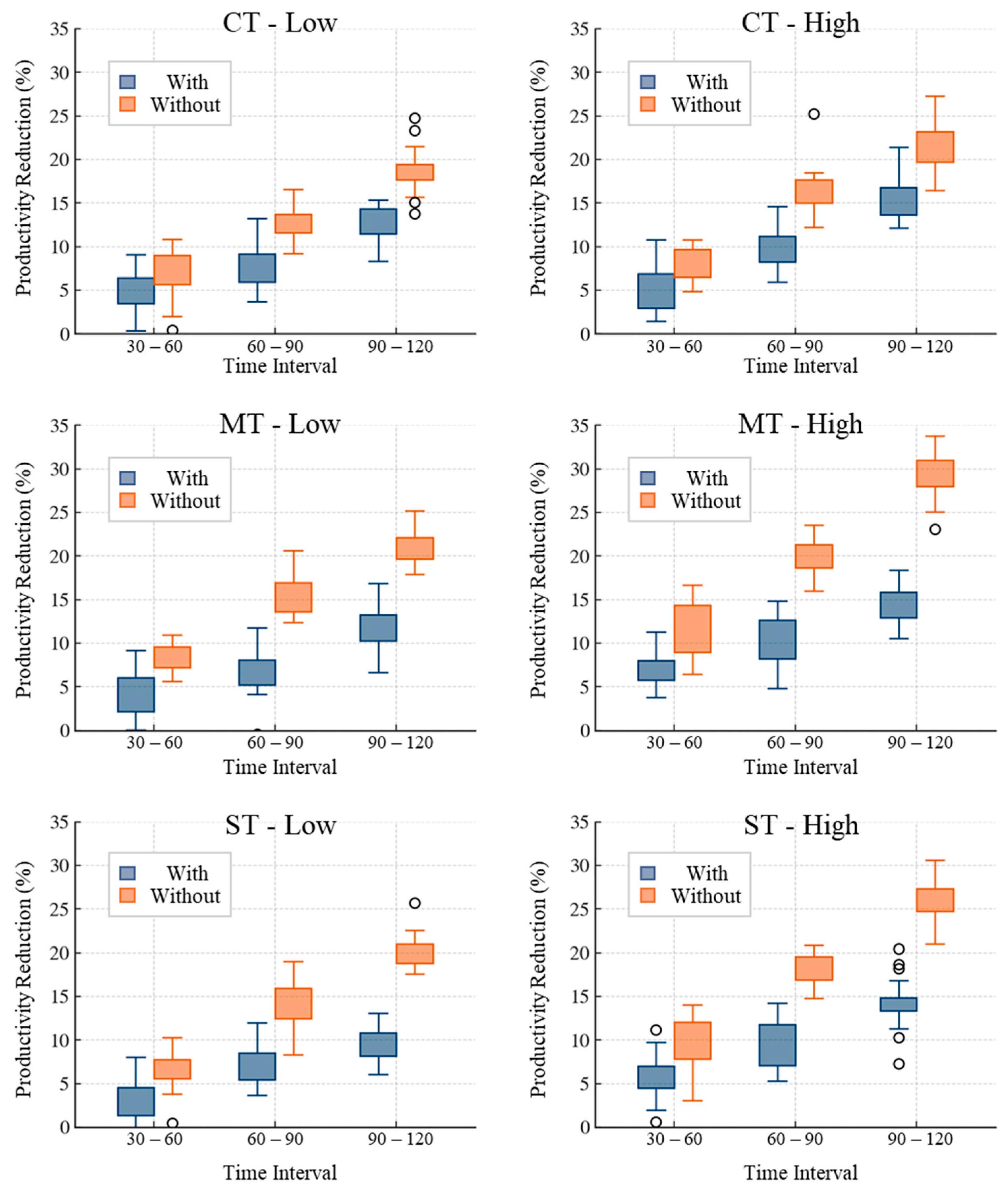
Figure 8 illustrates the time-based productivity trends for each task type and intensity level, comparing exoskeleton and non-exoskeleton conditions over the 2 h work period. The graphs clearly show that productivity declined over time in all conditions, but the rate of decline was consistently lower when using the exoskeleton. Open circles (○) represent data points classified as statistical outliers in the box plots.
Table 5 quantifies the productivity decline rates for each task and intensity level during the 2 h work period (from 0–30 min to 90–120 min).
For the sack carrying task (CT) under low-intensity conditions, productivity decreased by 18.6% without the exoskeleton while, with the exoskeleton, it decreased by only 12.7%. This means that using the exoskeleton results in a 5.9% less productivity decline. In high-intensity conditions (inclined surface), the difference was even greater, with productivity decreasing by 21.5% without the exoskeleton but only 14.6% with the exoskeleton, showing a 6.9% difference.
The effects of the exoskeleton were most pronounced in the masonry bricklaying task (MT). Under low-intensity conditions (waist-level work), productivity decreased by 21.5% without the exoskeleton, but only by 11.5% with the exoskeleton, resulting in a 10.0% difference. In high-intensity conditions (ground-level work), this difference expanded further, with productivity declining by 28.8% without the exoskeleton compared to just 15.5% with the exoskeleton, representing a substantial 14.3% difference.
Similar patterns were observed in the scaffolding installation task (ST). In low-intensity conditions (clamp installation), productivity decreased by 20.0% without the exoskeleton but only by 10.2% with the exoskeleton, showing a 9.8% difference. In high-intensity conditions (frame installation), productivity decreased by 26.2% without the exoskeleton but only by 14.0% with the exoskeleton, demonstrating a 12.1% difference.
These results show that the exoskeleton had a significant impact on maintaining worker productivity across all task types, with enhanced effects in high-intensity conditions. In all tasks, the differences in high-intensity conditions (CT: 6.9%, MT: 14.3%, ST: 12.1%) were greater than those in low-intensity conditions (CT: 5.9%, MT: 10.0%, ST: 9.8%). This clearly demonstrates that exoskeletons make a greater contribution to reducing fatigue and maintaining productivity in more physically demanding work environments.
3.3.2. Work Consistency over Time
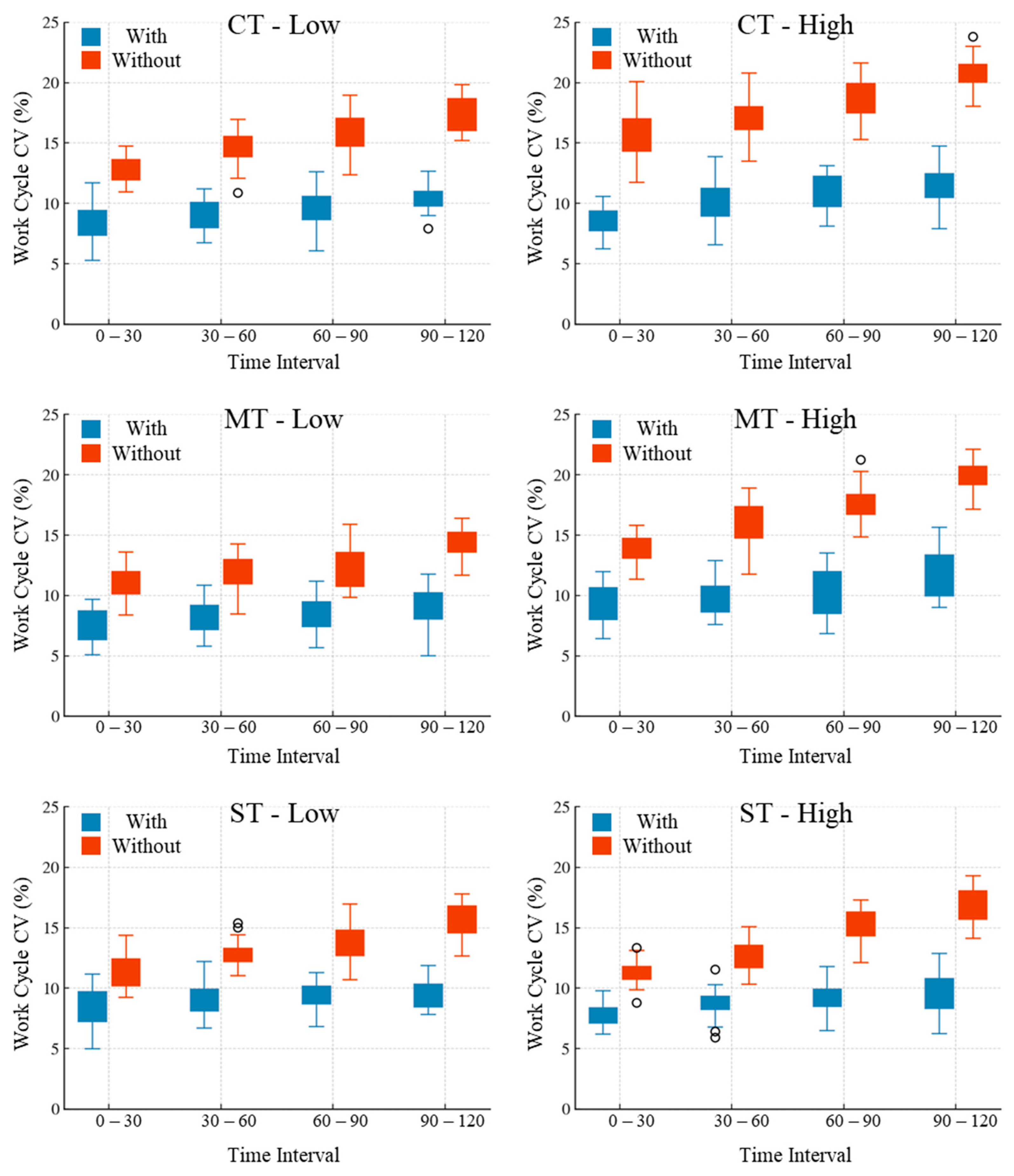
Figure 9 illustrates how the coefficient of variation (CV) for work cycle duration changes over time for each task under different conditions. The data presented in these graphs provides evidence of how movement consistency is affected by exoskeleton use throughout the 2 h work period. Open circles (○) represent data points classified as statistical outliers in the box plots.
For the sack carrying task (CT) under low-intensity conditions, workers without exoskeletons showed a CV increase from 12.8% in the first interval to 17.3% in the final interval, while with the exoskeleton, the CV increased more modestly from 8.5% to only 10.0%. Under high-intensity conditions, the effect was more pronounced, with the CV without exoskeleton rising from 15.3% to 20.8%, while with the exoskeleton it increased from 9.2% to only 11.4%.
The masonry bricklaying task (MT) showed similar patterns. Under low-intensity conditions, the CV without exoskeleton increased from 10.5% to 14.4%, compared to a smaller rise from 7.6% to 9.1% with the exoskeleton. The high-intensity condition demonstrated an even greater effect, with the CV increasing from 14.2% to 19.5% without the exoskeleton, while increasing more modestly from 9.3% to 11.6% with the exoskeleton.
For the scaffolding installation task (ST), the low-intensity condition showed the CV without exoskeleton increasing from 11.3% to 15.3%, while with exoskeleton it increased from 8.1% to only 9.6%. In the high-intensity condition, the CV without exoskeleton rose from 11.4% to 16.8%, compared to a smaller increase from 7.6% to 9.3% with exoskeleton.
Even in the first interval (0–30 min), the exoskeleton provided improvements in movement consistency, with lower CV values than without exoskeleton. This advantage consistently increased over time, with the difference between conditions growing from the first interval to the final interval. The average increase in CV when using the exoskeleton across all tasks was significantly smaller from the first to last interval, compared to the increase without exoskeleton.
The data demonstrates that the exoskeleton not only improves initial movement consistency but becomes increasingly valuable as work duration extends, effectively mitigating the natural deterioration in movement precision that occurs with fatigue. The stability of CV values when using the exoskeleton, even after two hours of continuous work, suggests that this technology could significantly contribute to maintaining both work quality and worker wellbeing during extended construction activities.
3.3.3. Adaptation Patterns and Movement Consistency
Figure 10 illustrates the relative productivity advantage of using the exoskeleton across time intervals. The graph shows the percentage productivity benefit of the exoskeleton compared to non-exoskeleton conditions for each task type and intensity level throughout the 2 h work period.
Notably, the productivity advantage of the exoskeleton increased progressively throughout the 2 h work period. During the initial 0–30-min interval, the average productivity advantage across all tasks was 23.9%, which increased to 29.0% during the 30–60-min interval, then to 34.9% during the 60–90-min interval, and finally reached 40.1% in the 90–120-min interval. This consistent upward trend demonstrates that the benefits of exoskeleton use become more pronounced as work duration extends.
The data reveal different patterns of exoskeleton benefit across task types. The masonry task under high-intensity conditions showed the most dramatic increase in productivity advantage, rising from 32.7% in the first interval to an impressive 59.5% in the final interval. This suggests that the repetitive bending motions required for ground-level masonry work particularly benefit from exoskeleton assistance during extended work periods. The scaffolding installation task under high-intensity conditions also showed substantial improvement, with the productivity advantage increasing from 22.8% to 43.0% over the work period.
Even tasks with more modest overall benefits, such as the sack carrying task under low-intensity conditions, demonstrated a clear pattern of increasing advantage over time, with productivity benefits rising from 20.8% to 29.6%. This pattern was consistent across all task types and intensity levels, though the magnitude of improvement varied.
High-intensity conditions consistently showed larger productivity advantages compared to their low-intensity counterparts for the same task type, particularly in later time intervals. This pattern suggests that the exoskeleton’s fatigue-reduction benefits become increasingly valuable as physical demands increase. This increasing productivity advantage over time results from a combination of factors: workers’ progressive adaptation to the exoskeleton, the cumulative effects of fatigue reduction, and the maintenance of more efficient movement patterns throughout the work period. The data provides strong evidence that exoskeletons offer substantial and increasing benefits for prolonged construction work, with the greatest advantages observed in physically demanding tasks and extended work durations.
4. Discussion
This study conducted a quantitative analysis of the impact of wearable robotic exoskeletons on construction productivity, work stability, and performance consistency across various tasks and intensity levels. The findings provide valuable insights into the practical application and benefits of exoskeleton technology in construction environments. This section discusses the implications of the results, identifies key factors influencing exoskeleton effectiveness, and addresses limitations and future research directions.
4.1. Comprehensive Performance Assessment
The results from this study demonstrate that wearable robotic exoskeletons provide substantial benefits across multiple performance dimensions in construction activities. When integrating the findings from productivity analyses, stability assessments, and time-dependent performance evaluations, several key patterns emerge.
First, the exoskeleton’s impact varied significantly by task type and intensity. While all tasks showed improved performance with exoskeleton assistance, the benefits were most pronounced in high-intensity conditions. For instance, in the masonry task under high-intensity conditions, productivity improved by 32.7% initially, growing to 59.5% by the end of the 2 h period, and cycle consistency improved by 34.5%, compared to 20.0% and 27.6% improvements respectively under low-intensity conditions. This suggests that exoskeletons provide the greatest value in more physically demanding scenarios, where workers face higher physical strain and fatigue potential.
Second, the temporal analysis revealed important adaptation patterns that have practical implications for exoskeleton implementation. The increasing productivity advantage observed throughout the 2 h period (from 23.9% to 40.1% on average) indicates both a learning curve as workers adapt to technology and the increasing benefits of fatigue reduction over time. This adaptation pattern varied by task complexity, with the masonry task showing the most pronounced improvement over time. This finding suggests that training programs and adequate adaptation periods are essential when introducing exoskeletons to construction environments.
Third, the comprehensive analysis of both productivity and stability metrics allows for a more nuanced understanding of exoskeleton benefits. While productivity improvements were substantial (ranging from 20.0% to 59.5% across conditions), the improvements in postural stability (24.8% to 35.4% reduction in sway area) and movement consistency (27.6% to 39.9% reduction in cycle duration CV) were equally significant. This suggests that exoskeletons provide dual benefits: increasing output while simultaneously reducing physical strain and enhancing motion quality.
4.2. Factors Influencing Exoskeleton Effectiveness
Several key factors appear to influence the effectiveness of wearable robotic exoskeletons in construction settings. Understanding these factors is crucial for optimizing the implementation and maximizing the benefits of this technology.
Task characteristics played a significant role in determining exoskeleton effectiveness. Tasks involving repetitive bending and lifting (such as the masonry task at ground level) showed the greatest productivity improvements. This aligns with the mechanical assistance provided by the exoskeleton, which is particularly beneficial for reducing the strain associated with repetitive bending movements. Conversely, tasks requiring more dexterous upper-body movements showed more modest improvements, suggesting that current exoskeleton designs may be particularly suited for lower-body intensive tasks.
Work intensity emerged as another critical factor. The consistent finding across all analyses was that high-intensity conditions showed greater relative improvements with exoskeleton assistance. This pattern suggests a potential application priority for exoskeleton technology in construction settings. Implementing exoskeletons in the most physically demanding tasks may provide the highest return on investment in terms of both productivity gains and potential injury prevention.
Adaptation time also significantly influenced exoskeleton effectiveness. The continuous increase in productivity advantage over the 2 h work period (reaching an average of 40.1% in the final interval) indicates that workers require time to optimize their movements with the exoskeleton and that fatigue mitigation benefits become more pronounced with extended use. This finding has important implications for training programs and expectations when implementing this technology. Organizations should account for adaptation periods and avoid making performance judgments based solely on initial usage.
4.3. Practical Implications
The findings from this study have several practical implications for the construction industry and other sectors involving physical labor. Based on this study’s comprehensive analysis, construction managers should prioritize exoskeleton implementation in high-intensity tasks involving repetitive bending, lifting, and standing postures, as this targeted approach may maximize return on investment. Organizations would benefit from developing structured training programs that allow workers sufficient time to adapt to exoskeletons, with this study’s findings suggesting that adaptation benefits continue to increase even after 2 h of use, with productivity advantages growing from 23.9% initially to 40.1% by the end of the observed period. This gradual improvement suggests that as users become more familiar with exoskeleton, their movement efficiency and task fluency improve, reinforcing the importance of adaptation in maximizing the device’s effectiveness.
When evaluating exoskeleton effectiveness, it is important to consider multiple performance metrics beyond raw productivity, including motion stability, work consistency, and long-term sustainability, as these comprehensive metrics provide a more complete picture of the technology’s value. The finding that exoskeletons help maintain higher productivity over extended work periods suggests that work planning could be optimized by accounting for the fatigue-reduction benefits of this technology, potentially allowing for more efficient resource allocation in construction projects. The substantial productivity advantages observed in high-intensity conditions (up to 59.5% for ground-level masonry work) suggest that targeted deployment of exoskeletons in the most physically demanding tasks could significantly impact overall project timelines and costs.
Beyond performance metrics, a preliminary cost–benefit consideration indicates that wearable robotic exoskeletons may also be economically viable. Assuming a device cost of approximately USD 5000 and an average productivity gain of 40% in high-intensity tasks, the investment can potentially be recouped within several weeks in labor-intensive projects. Furthermore, reduced physical strain and fatigue may lead to lower injury rates and associated costs related to worker compensation or downtime. While a full economic model is beyond the scope of this study, this preliminary analysis highlights the technology’s potential value from both operational and financial perspectives, reinforcing its relevance for industry application.
While traditional ergonomic interventions—such as lift-assist devices, adjustable work platforms, or manual handling tools—can also reduce physical load, they often lack the mobility and adaptability required in unstructured construction environments. Wearable exoskeletons provide a unique advantage by allowing support to move with the worker across varied tasks and terrains. Although the initial cost of exoskeletons may be higher, their ability to improve both productivity and stability in dynamic work settings may offset these costs over time. However, it remains important to further investigate how exoskeletons influence worker agility and safety in unpredictable environments, particularly during rapid movements or non-standard task transitions. Ensuring that physical support does not compromise movement adaptability is critical for successful on-site implementation. Future research should explore direct comparisons of cost-effectiveness and task suitability between exoskeletons and other ergonomic solutions.
4.4. Limitations and Future Research
While this study provides valuable insights into the short-term effectiveness of wearable robotic exoskeletons in construction settings, several limitations should be acknowledged to guide future research. First, the experiments were conducted in a controlled environment that may not fully reflect the variability and complexity of actual construction sites. Environmental factors, such as uneven terrain, variable weather conditions, and task unpredictability, could influence exoskeleton performance in ways that were not captured in this study. Second, the study employed a single commercially available exoskeleton model (WIR-WIM-KRA), and the results may not be generalized across other exoskeleton designs. Variations in support mechanisms, joint range, and weight distribution could lead to different outcomes depending on task characteristics and user needs. Future studies comparing multiple devices will be essential to determine which design features are best suited for specific construction tasks. Third, the duration of the experiment was limited to a 2 h work session. While this timeframe allowed us to observe productivity trends and fatigue-related effects, it does not capture the long-term implications of regular exoskeleton use. Over days or weeks, workers may experience physiological adaptation (e.g., muscle compensation or deconditioning), psychological effects (such as perceived dependence or resistance), and comfort-related challenges (e.g., heat, fit, or skin irritation). These factors could influence user acceptance, safety, and sustain effectiveness over time. In addition, worker perceptions—including comfort, usability, and perceived usefulness—are likely to play a critical role in adoption of exoskeleton. Future research should incorporate user feedback and perception studies to better understand acceptance barriers and develop worker-centered design improvements. Additionally, the participant sample consisted exclusively of healthy, experienced construction workers, which may limit the generalizability of the findings. This group may not fully represent the broader construction workforce, which includes older individuals, less experienced workers, and those with pre-existing musculoskeletal conditions. These populations may respond differently to exoskeleton use in terms of usability, fatigue response, or safety. Future research should include more diverse participant profiles to better assess how different user characteristics influence the effectiveness and adoption of wearable robotic exoskeletons.
Therefore, this study recommends that future research includes longitudinal studies that investigate extended usage patterns, including multi-day or multi-week observation periods. Such studies could explore how prolonged exposure to robotic assistance affects muscular activity, movement strategies, energy expenditure, and injury risks. Incorporating additional physiological metrics, such as EMG, oxygen consumption, or heart rate recovery, would also provide deeper insight into internal workload and strain. Moreover, future work should involve field-based trials in active construction environments to evaluate real-world applicability and operational feasibility. Investigating user adaptation, collaborative dynamics, and the integration of exoskeletons with other emerging technologies (e.g., digital monitoring systems or automation tools) would further enrich the understanding of practical implementation. While this study employed standard statistical analyses, including p-values and effect sizes, it did not include confidence intervals or corrections for multiple comparisons, which may affect the precision of inference. Future studies could incorporate mixed-effects models or Bayesian approaches to account for individual variability and provide more nuanced interpretations of intervention effects under complex conditions. Finally, comprehensive economic analyses that assess cost–benefit trade-offs, including not only productivity gains but also reductions in injury-related costs, are essential for supporting evidence-based adoption decisions in industry.
5. Conclusions
This research investigated the impact of wearable robotic exoskeletons on construction task performance, addressing a significant gap in quantitative analysis of how these assistive devices affect productivity and motion stability in real construction scenarios. The construction industry continues to rely heavily on manual labor despite technological advancements, making solutions that simultaneously reduce physical strain and improve productivity essential for industry advancement.
The methodology employed a systematic experimental approach examining three representative construction activities—sack carrying task (CT), masonry bricklaying task (MT), and scaffolding installation task (ST)—under both low and high-intensity conditions. Twenty construction workers with relevant experience participated in the study after standardized training with the WIR-WIM-KRA exoskeleton. We collected comprehensive data through IMU sensors positioned at participants’ waist and ankle, capturing detailed movement patterns while measuring task completion rates across 2 h work periods.
Results demonstrated consistent and substantial benefits from exoskeleton use across all dimensions of performance. Productivity analysis revealed significant improvements ranging from 20.0% to 59.5% depending on task type and intensity, with high-intensity tasks showing the greatest benefits. Stability assessment through IMU data indicated a 24.8–35.4% reduction in postural sway area and improved movement consistency, particularly during challenging physical tasks. The time-dependent analysis showed that exoskeleton benefits continuously increased throughout the 2 h work period, with average productivity advantages growing from 23.9% initially to 40.1% in the final interval, demonstrating both worker adaptation to the technology and substantial fatigue mitigation effects.
The discussion identified key factors influencing exoskeleton effectiveness, including task characteristics, work intensity, and adaptation time. The findings suggest that construction managers should prioritize exoskeleton implementation in high-intensity tasks involving repetitive bending and lifting motions and should account for adaptation periods when implementing this technology. The comprehensive benefits observed—spanning productivity enhancement, stability improvement, and fatigue reduction—position wearable robotic exoskeletons as valuable tools that augment human capabilities rather than replacing workers.
In conclusion, this research has empirically demonstrated that wearable robotic exoskeletons serve as more than supplementary assistive devices—they function as significant productivity enhancers that simultaneously address the physical demands of construction work. As industry continues to face challenges of labor shortages and physically demanding tasks, exoskeleton technology offers a promising middle path that enhances human capabilities while potentially transforming construction practices.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}