1. Introduction
The complexities of automated vehicle (AV) interactions with human road users are now recognized as a significant obstacle to their large-scale adoption [
1,
2,
3,
4,
5]. Inadequate interaction between AVs and humans could result in accidents if the AVs’ actions are not anticipated by human drivers, or traffic congestion and human dissatisfaction if AVs are overly cautious [
6]. Hence, there is a pressing need for advancements in understanding traffic interaction, since the substantial societal and economic gains anticipated from the deployment of AVs depend on these vehicles’ ability to anticipate and respond appropriately to the behaviors of human driver, pedestrians and other human road users [
7,
8,
9]. This urgency highlights existing research questions and introduces new ones regarding how traditional human interactions unfold in traffic—the ability to rigorously examine these interactions, discern nuanced differences, and analyze both the breakdowns and recoveries, is crucial.
To drive the research on human behavior in traffic interactions, Markkula et al. [
10] established a comprehensive, high-level conceptual framework for articulating and examining road traffic interactions from an interdisciplinary perspective. This conceptual framework introduced a precise definition of a “traffic interaction” and outlined a taxonomy of behaviors that road users display during such interactions. It offers multiple benefits: besides enhancing communication among researchers through clear definitions, it improves observational methodologies with precise interaction classifications, informs the setting of technical standards for AVs based on a detailed understanding of traffic interactions, and serves as a foundation for developing detailed interaction models.
Markkula et al.’s work surfaces the need for controlled experiments of road traffic interactions, but the practical operationalization of this framework into human participant studies involves numerous non-explicit challenges and decision points that are not captured in their framework but worth detailing for researchers embarking on the critical challenge of gathering qualitative and quantitative data about traffic interactions. Furthermore, Deshmukh et al. [
11] presented a systematic review as a valuable survey of challenging scenarios for automated vehicles (AVs) and vulnerable road users (VRUs), with its focus primarily centering on the identification and classification of critical scenarios from a theoretical and observational standpoint. While these prior works provided a theoretical overview of the diverse possible interaction scenarios, they do not extend to conducting controlled studies with these scenarios. In our work, we build upon prior research, particularly, Markkula et al.’s theoretical framework [
10] to operationalize experimental studies that enable us to gather qualitative and quantitative data about traffic interaction behavior. We aim to answer a critical question as experimentalists: how should we proceed in operationalizing these interactions for controlled empirical study? A key aspect to focus on is dyadic traffic interactions—interactions that occur between two road users, such as a human-operated vehicle and an autonomous vehicle (see
Figure 1). Studying these two-party interactions is essential for understanding the dynamic exchanges and decision-making processes that take place in real-world traffic, where vehicles must constantly respond to the behaviors and actions of others. Operationalizing these dyadic interactions in a controlled setting will allow for more detailed investigation of how autonomous vehicles can safely and efficiently navigate complex situations involving human road users.
Our work extends Markkula et al.’s work by addressing the practical challenges encountered in setting up study design and conducting real-world or virtual interaction studies. We elucidate the logistical, technical, and methodological issues that researchers face when attempting to set up and implement these scenarios in empirical settings, with a particular focus on dyadic scenarios. It is not practical to run every conceivable interaction scenario, due to constraints such as time, budget, participant availability, and the technical limitations of simulation environments. Hence, experimentalists must make strategic choices that balance depth of inquiry with feasibility, for which we provide initial guidance in the framework presented in this paper. More specifically, this paper is a synthesis of the outcomes of five brainstorming sessions on the various pragmatic decisions necessary for studying various interaction scenarios, each designed to provoke different behaviors, and highlight the trade-offs involved in scoping such studies. Our aim is to offer an initial framework that will guide researchers in making informed decisions about study design that balance the depth of individual scenario analysis with the breadth required to derive meaningful insights applicable to more general contexts.
Contribution Statement
In this work, we offer an evaluation of the complexities in traffic interactions for controlled studies, providing a conceptual guide for downstream research in this field that we hope others will adopt. This framework aims to enhance study reproducibility, enable comparability across research, and support the design of interaction studies. By defining these complexities, we help researchers implement and investigate traffic interactions more effectively, advancing both theoretical and practical research in traffic management and vehicle automation. This discussion on the pragmatics of operationalizing dyadic traffic interaction studies—while not comprehensive—lays the groundwork of a structured approach to simulator-based studies by serving two primary purposes: (1) to educate both researchers and practitioners about the realities of conducting traffic interaction studies, particularly for those who are unfamiliar with the intricacies involved in such research; and (2) to establish a common language that facilitates clear communication between researchers and reviewers.
3. Method
Our process consisted of a series of brainstorming sessions between the authors—each having extensive experience in designing and executing both controlled and naturalistic studies on traffic interactions in academia and automotive industry.
The brainstorming sessions conducted for this study spanned three meetings, during which the authors collaboratively examined the complexities of operationalizing dyadic traffic interaction studies. The discussions were iterative and comprehensive, revisiting multiple aspects of the study design across the three meetings. The goal was to methodically address pragmatic issues while developing the framework. No significant disagreements emerged during these sessions; instead, the team focused on systematically unearthing and resolving issues related to study design pragmatics. The first author was mainly responsible for preparing and organizing the sessions as well as for documenting the results. All authors participated in the brainstorming, structuring and revision of the framework.
This research was part of a broader NSF-funded project on vehicle-pedestrian interaction. As part of this effort, the research team consulted an external advisory board composed of eight members representing diverse sectors, including academia, industry and policy. The advisory board brought a wealth of expertise to the discussions from experience in the domains of human factors, traffic psychology, and autonomous vehicle systems. This ensured a well-rounded exploration of the challenges and solutions. provided valuable feedback on the research and its development, ensuring that diverse perspectives informed our work. The ideas generated during the brainstorming sessions were presented to this advisory board, whose insights were instrumental in refining the work and enhancing its applicability.
Each session was designed to progressively deconstruct and address the complexities of traffic interaction studies. During these sessions, we identified key elements of interaction as defined in theoretical models and discussed how these elements could be translated into practical scenarios that could be implemented in a simulated study design in the following steps:
3.1. Identifying Elements of Interaction
Initial sessions focused on dissecting the theoretical aspects of interactions, such as the spatial and temporal dynamics between multiple road users, and understanding how these could influence each other’s behavior within a shared space. The outcomes from this step underpin the theoretical ground for our framework and are as such reflected in the rest of our decisions.
3.2. Translation to Practical Implementation
Subsequently, we delved into the operationalization of these interactions within a simulation. This included discussions on the technological and logistical feasibility of simulating complex multi-agent interactions, considering the physical constraints of the simulation environment, resource limitations, safety and ethics, and participant requirements. The overall structure of our framework and the decisions that the experimenters need to make for a successful controlled interaction study constitute the key results from this step. More specifically, we identified a set of high-level trade-offs that experimenters need to consider when designing such a study (Depth vs. Breadth, Quality vs. Quantity, Cost vs. Coverage, Complexity vs. Manageability), as well as a set of critical decision-making aspects (Choice of scenarios, Interaction approach, Measures, and Timing and coordination of interactions). While there might be other important aspects, these four wide dimensions were selected by the team as the most critical for a comprehensive study design.
3.3. Scenario Development
Based on the results from the previous two steps, we systematically developed an exhaustive set of interaction scenarios between a pair of traffic participants (driver-driver or driver-pedestrian) that encompassed a broad range of situations. The results from this step are included in the framework as a comprehensive pool of scenarios from which the final set of scenarios in the study can be selected based on the research questions and study criteria.
4. Results: Aspects of Traffic Interaction Study Design Warranting Trade-Offs
In setting up experimental interaction studies, experimenters encounter a variety of challenging constraints and considerations that significantly influenced our study design. Here, we share insights into the decision-making processes involved in designing interaction studies. The purpose is not to prescribe a universal method for conducting such studies but rather to illuminate the pragmatic limitations and logistical challenges inherent to this type of research.
Although traffic interactions may involve multiple participants, in this paper, for analytical simplicity, we decompose these multi-agent interactions into dyadic components, i.e., we only focus on 2-actor scenarios. This reduction is based on the assumption that at a fundamental level, traffic interactions occur between pairs and are resolved according to the most immediate threats or safety concerns, which allows us to dissect the broader challenges into more manageable segments.
As experimenters, we must confront the inherent trade-off between the depth of study in specific scenarios and the generalizability of findings. Not all behaviors or phenomena observed in particular settings will necessarily apply to all scenarios, highlighting the limitations of each study’s applicability. This requires us to keep in mind the following decision factors:
Depth vs. Breadth: Concentrating on specific scenarios provides depth but may sacrifice breadth and general applicability.
Quality vs. Quantity: Gathering high-quality data in a few scenarios might mean fewer overall observations, affecting statistical power and broader implications.
Cost vs. Coverage: Financial constraints may limit the number of scenarios or participants, impacting the study’s scope and comprehensiveness.
Complexity vs. Manageability: Studying more complex interactions offers richer insights but can complicate the analysis and interpretation of data, and also create complications with ethical approval from institutional IRBs if the complexity and realism of the setup can potentially create safety concerns for participants.
By highlighting these specific decisions and trade-offs necessary in the design and execution of interaction studies, we aim to clarify the requirements for researchers planning to run interaction studies. Besides these broad decision factors, operationalizing interaction studies necessitates a balance of trade-offs in scoping and managing interactions effectively. It is important to determine reasonable ways to break down the comprehensive problem space into manageable, researchable chunks for a focused and effective study. Our brainstorming sessions identified critical decision-making aspects across four dimensions that influence the design of these studies:
Choice of Scenarios: Choosing which scenarios to include involves weighing the comprehensiveness against cost and effort. It is impractical to cover every possible scenario, so selecting a subset that offers the most significant insights while being feasible is crucial.
Interaction approach—Vignettes vs. Drives: Deciding between using short, specific scenarios (vignettes) or longer, continuous driving simulations (drives) affects the depth of data and the naturalism of interactions.
Measures: Deciding what measurements to take (behavioral, physiological, subjective) and how these metrics can best capture the interactions of interest. The choice of the measures and how they are collected has a direct impact on the determination of whether the interaction approach of the study.
Timing and coordination of Interactions: Setups that attempt to control the timing to provoke interactions can detract from the natural flow of operating in traffic, presenting a trade-off against naturalism.
While addressing these aspects requires making decisions that may not always be optimal but are necessary within the study’s constraints, understanding these practical considerations ensures an effective and transparent design of interaction studies. This transparency not only aids in replicating studies but also in understanding and evaluating the limitations and strengths of research findings within the field. These trade-offs underscore the need for efficiently designed studies that maximize data collection within the available duration, ensuring participant well-being and adherence to budgetary constraints. These constraints necessitate a more selective approach to studying traffic interactions, focusing on key scenarios that offer the most significant insights relevant to the research questions at hand.
For each of these four dimensions, there are further technical considerations and research question needs that must play a role in determining the final study setup, which we elaborate in the subsequent sections of this paper.
4.1. Choice of Scenarios
Markkula’s detailed enumeration of interaction scenarios presents us with a decision point in conducting interaction studies: should we attempt to cover all enumerated scenarios or should we focus in-depth on a select few? Each approach offers distinct benefits and aligns with different research objectives. Broadly studying every possible scenario could provide a comprehensive understanding of traffic behavior across various contexts, emphasizing the universality of space-sharing conflicts. This approach would ideally capture the full spectrum of interaction dynamics, offering a macroscopic view of traffic behavior. However, the feasibility of such an exhaustive study is often limited by factors such as resources, time, funding, simulator sickness, and the sheer complexity of traffic environments.
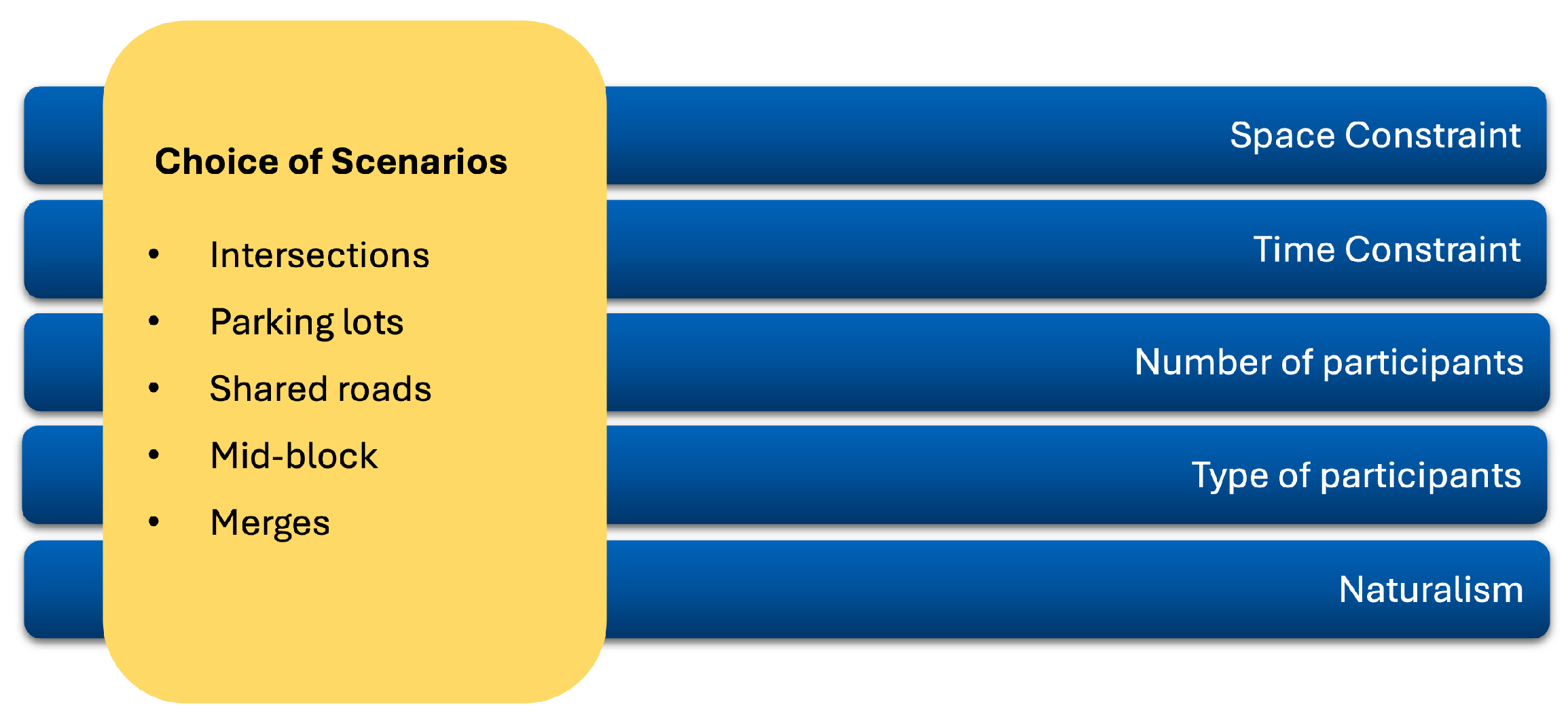
On the other hand, focusing on a few selected scenarios in depth allows for a more detailed exploration of specific interactions. While this approach sacrifices some breadth, it enhances depth and may lead to more detailed, context-specific understandings that can inform targeted interventions or policies. Given the impracticality of studying “every situation”, we suggest in this paper a “balanced” approach that involve selecting a representative range of diverse scenarios. This strategy enables researchers to explore how findings from one scenario may transfer to or differ from others, thereby uncovering the relationships between different types of encounters. Understanding these relationships can help to generalize findings and apply them more broadly, even to untested scenarios, thereby maximizing both the reach and the relevance of the research. However, at a more pragmatic level, the right approach is dictated by the technical constraints of the setup for the study, including:
Space Constraint: Physical or virtual environments where the studies are conducted might have limitations on the nature of the scenarios that can be realistically set up and analyzed due to space restrictions.
Time Constraint: Each scenario requires setup, execution, and analysis time. Covering every possible scenario in an interaction study can thus be exceedingly time-consuming, making it difficult to complete the study within a affordable timeframe. Besides, extensive time commitments can be taxing for participants, potentially affecting their performance and willingness to participate. Furthermore, if participants are compensated by the hour, budget limitations can restrict the total available hours for conducting the study. This financial constraint often necessitates a concise and focused experimental design to stay within budget. Furthermore, in simulated environments, prolonged exposure can lead to various physiological limitations among participants such as simulator sickness (a condition similar to motion sickness), fatigue and cognitive overload, which limits the duration participants can comfortably engage with the simulation.
Number of Participants: Recruiting a sufficient number of participants to cover all scenarios comprehensively can be challenging and costly, especially for more complex interactions that may require a larger and more diverse participant pool.
Type of Participants: Attention need to be paid to the specific demographic of participant, incorporating parameters such as age group and expertise level with a domain and technology (e.g., ADAS system usage, heavy vehicle operation experience, or level of exposure to autonomous driving), aligning with the agents required as actors in the study.
Naturalism: Conducting studies in in the real world ensures that the data and findings approach high ecological validity (e.g., drivers are more likely to exhibit natural driving behaviors). However, this inherently carries risks to the participant and others, and can be resource and cost intensive, and directly dictate the scenarios that are accessible to test in the circumstances.
4.1.1. Categorizing Scenarios
The location of the scenarios on road range from intersections, parking lots, shared roads (where vehicles and vulnerable road users occupy the same space with the latter having the right of way at all times), mid-block sites on roads, and merge situations. Within each of these scenarios, there can be various combinations of how a dyadic (two-agent) interaction can unfold, which is expounded in the appendices, while the final selection of the scenarios in the study from within that pool depend on the constraints explained earlier and shown in
Figure 2. Based on our brainstorming sessions, we argue that it is crucial to systematically determine the grouping of traffic interactions based on the specific research question being addressed. More specifically, in a study focusing on dyadic interactions, different kinds of groupings can be derived from the research question. For instance, one potential grouping could involve scenarios where one agent possesses the right of way while the other does not, necessitating a comprehensive examination of all such scenarios. Another grouping might focus on situations where one agent proceeds straight and the other needs to turn. Additionally, a further grouping could involve both actors executing a change in direction, requiring the specification of all scenarios that fit this criterion. The choice of grouping(s) stems directly from the research question, emphasizing the need to align with the underlying inquiry, rather than advocating for any particular grouping. Our proposed strategy ensures that the interactions studied are relevant to the specific dynamics and outcomes we aim to understand, allowing for more targeted and meaningful insights into traffic behavior and safety.
Choosing the right subset of scenarios for a traffic interaction study is a critical decision hinges critically on aligning with the research question at hand so that it balances thoroughness with practical constraints such as cost and effort. Running only one scenario might not be very informative, but attempting to cover all possible scenarios might neither be feasible nor efficient. The challenge, then, is to select a subset of scenarios that is both manageable and representative of the broader issues being investigated. Among the subset of scenarios that is chosen, it is important to articulate clearly what remains consistent across scenarios and what varies. Such clarity supports the study’s internal validity by illustrating how different variables or settings influence the outcomes.
Each scenario’s inclusion in the study must be justified, explaining why these particular scenarios were chosen over others. This justification should focus on their potential to provide insights into the types of interactions being studied. Additionally, establishing a common thread or theme that runs through all scenarios helps in synthesizing findings and drawing broader conclusions. Whether it is a specific type of interaction or a shared environmental condition, this commonality ties the scenarios together and enhances the overall coherence of the research. By thoughtfully selecting and justifying these scenarios, researchers ensure that their studies are both manageable and meaningful. This structured approach not only aids in conducting focused and effective research but also strengthens the study’s contribution to the broader field of traffic interaction studies, providing insightful and impactful results.
4.1.2. Example of Scenario Selection
Appendix A.1,
Appendix A.2,
Appendix A.3,
Appendix A.4,
Appendix B.1,
Appendix B.2,
Appendix B.3 and
Appendix B.4 showcase various use cases of driver:driver and driver:pedestrian interactions. Here, we outline a “balanced” approach to scenario selection and provide examples that illustrate how to streamline scenario selection based on these guidelines, which involves identifying a subset of representative scenarios that align closely with the research objectives while remaining feasible within the study’s constraints. Factors such as scenario relevance to the research question, potential for generating impactful insights, and logistical feasibility (e.g., time required, participant burden, and budgetary limits) are critical criteria for prioritization. By focusing on scenarios that address the most pressing aspects of the research question or that are most likely to yield transferable insights, researchers can make informed decisions about where to allocate limited resources effectively.
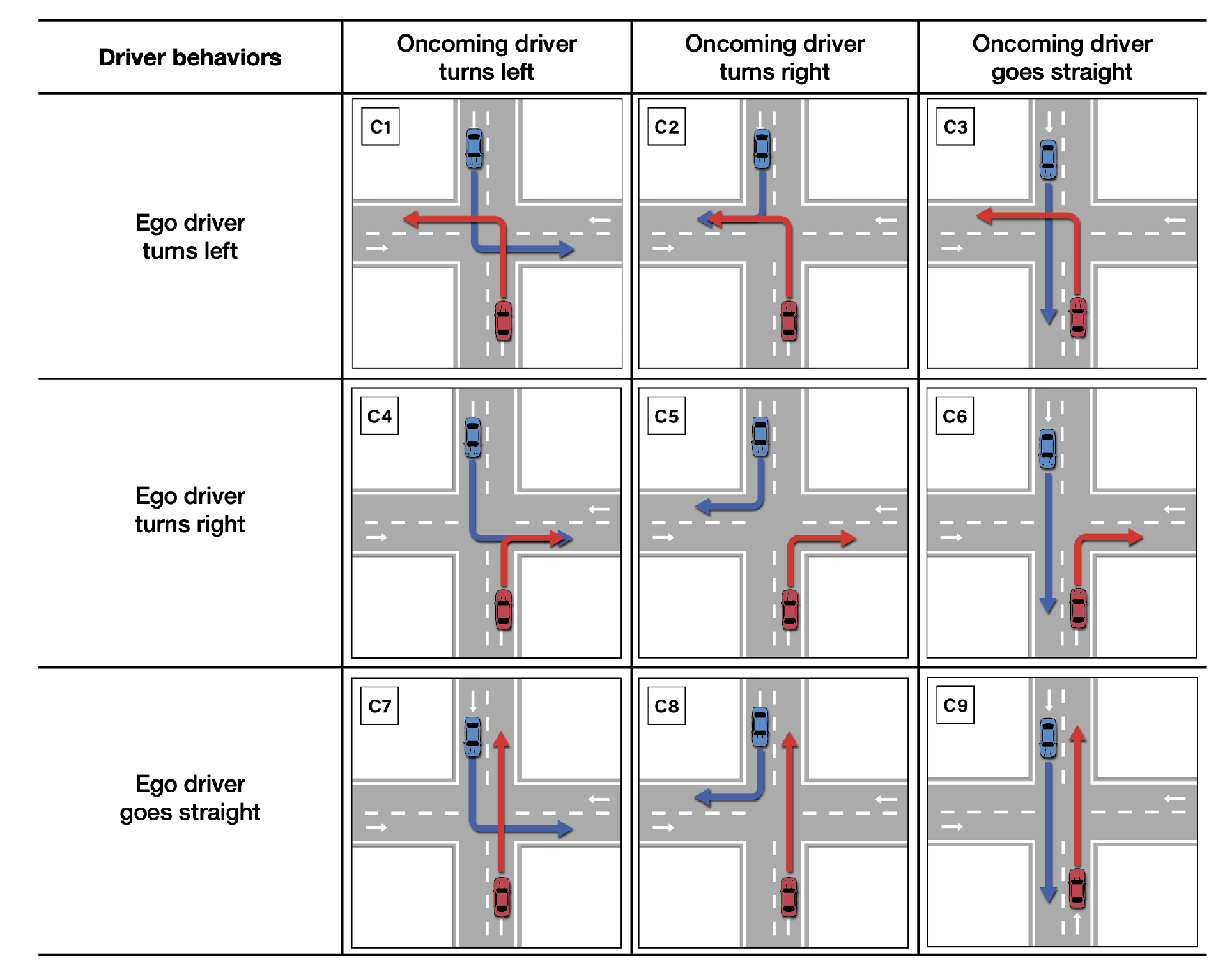
The scenarios highlighted in
Figure A1 and
Figure A2 refer to interactions between two drivers when they approach one another in an orthogonal (perpendicular) or contra-directional (head-on) manner respectively. In fleshing out the scenarios, the grouping (“common thread”) applied was the direction of travel of the other car (left, right, or straight) in relation to the ego car. Once these scenarios are thoroughly elaborated, we realize that the 27 total interaction scenarios (18 orthogonal and 9 contra-directional) is a large number of scenarios that may be pragmatically impossible to investigate exhaustively in an interaction study. It therefore becomes necessary to eliminate some scenarios to scope the study to the ones that are the core focus of the research question. For instance, if the research question deals specifically with space sharing conflicts, then there may be an argument to eliminate scenarios in which the cars do not actively cross one another’s path even though they encounter one another. Thus, in
Figure A1, scenarios DD-O2, O-5, O7, O8, O10, O11, O12, and O14 can be omitted. Similarly, in
Figure A2, scenarios DD-C5, C6, C8, and C9 may be ignored. This allows for a more streamlined consideration of the problem space for a focused interaction study.
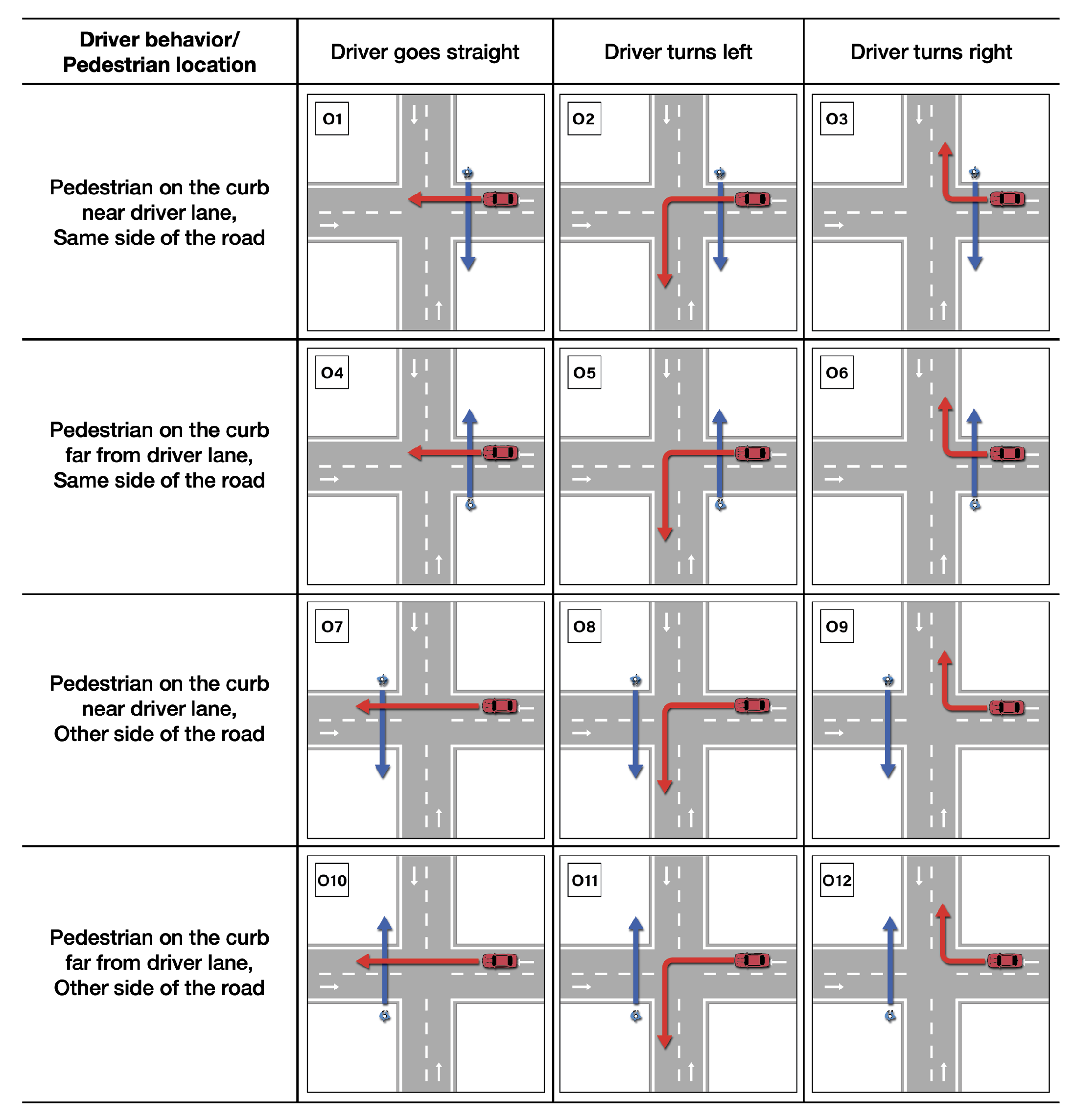
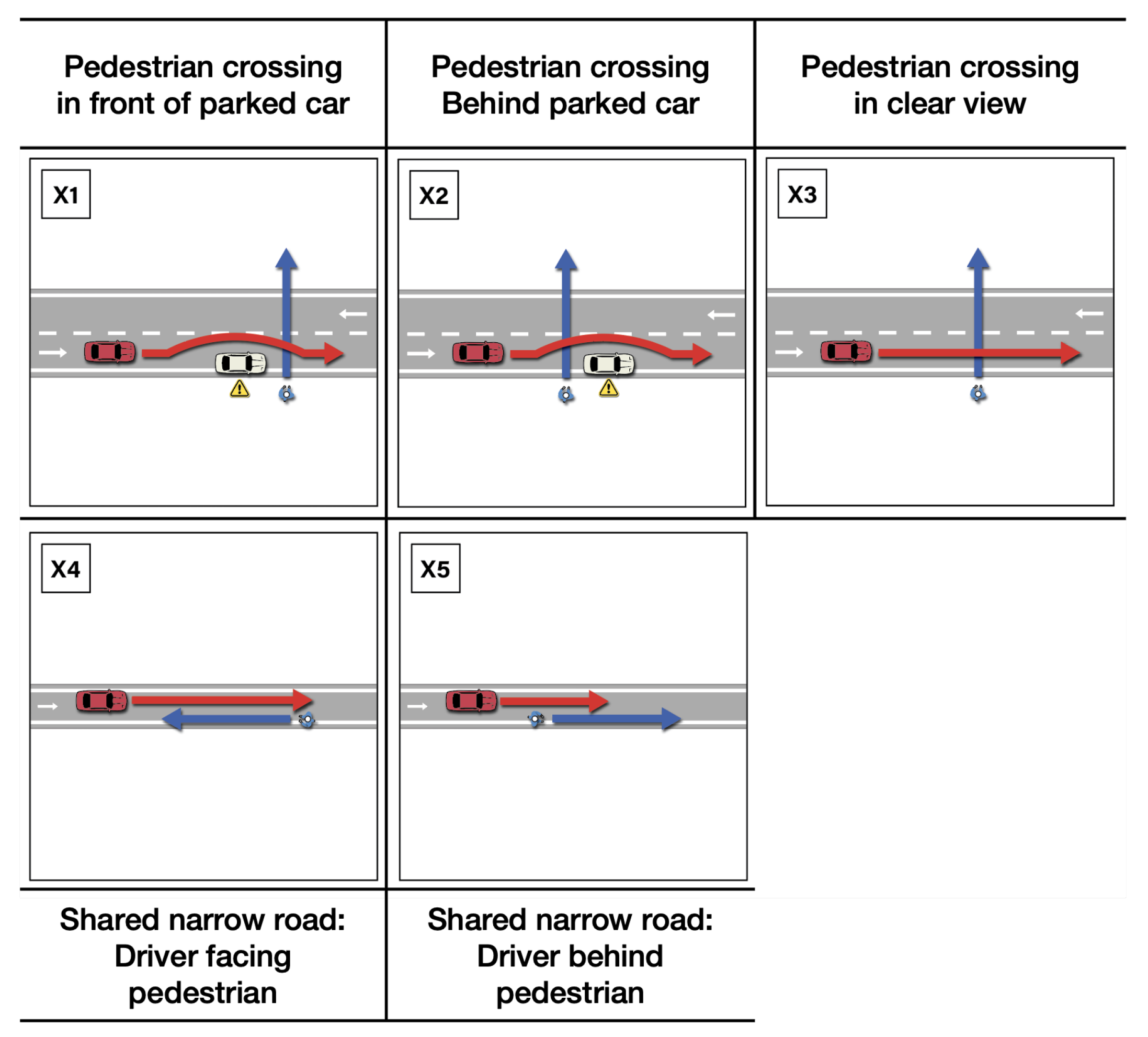
Similarly,
Figure A5 and
Figure A6 showcase the interactions between a driver and a pedestrian when they approach one another in an orthogonal (perpendicular) or contra-directional (parallel/head-on) manner respectively. Among the 24 total interaction scenarios (12 orthogonal and 12 contra-directional), the research question may help us winnow down the scenarios of interest. For example, if the focus is on how the pedestrian crosses the road when the car approaches from their side regardless of the behavior of the car predicated on its intention (to turn or go straight) at the intersection, the scenarios DP-O1, O2, and O3 essentially reduce to one scenario—for each of them the car approaches the pedestrian from the side. Any one of these three scenarios can be chosen. Consider another study design driven by road geometry: if the road the pedestrian crosses is a single-lane road as opposed to a multi-lane one, scenarios O4, O5, and O6 essentially mirror scenarios O1, O2, and O3 respectively. In each of them, the pedestrian essentially crosses a one-lane road with a car approaching them from the side. This type of rationalizing can help scope the interaction setup into component scenarios that are of interest for the research question.
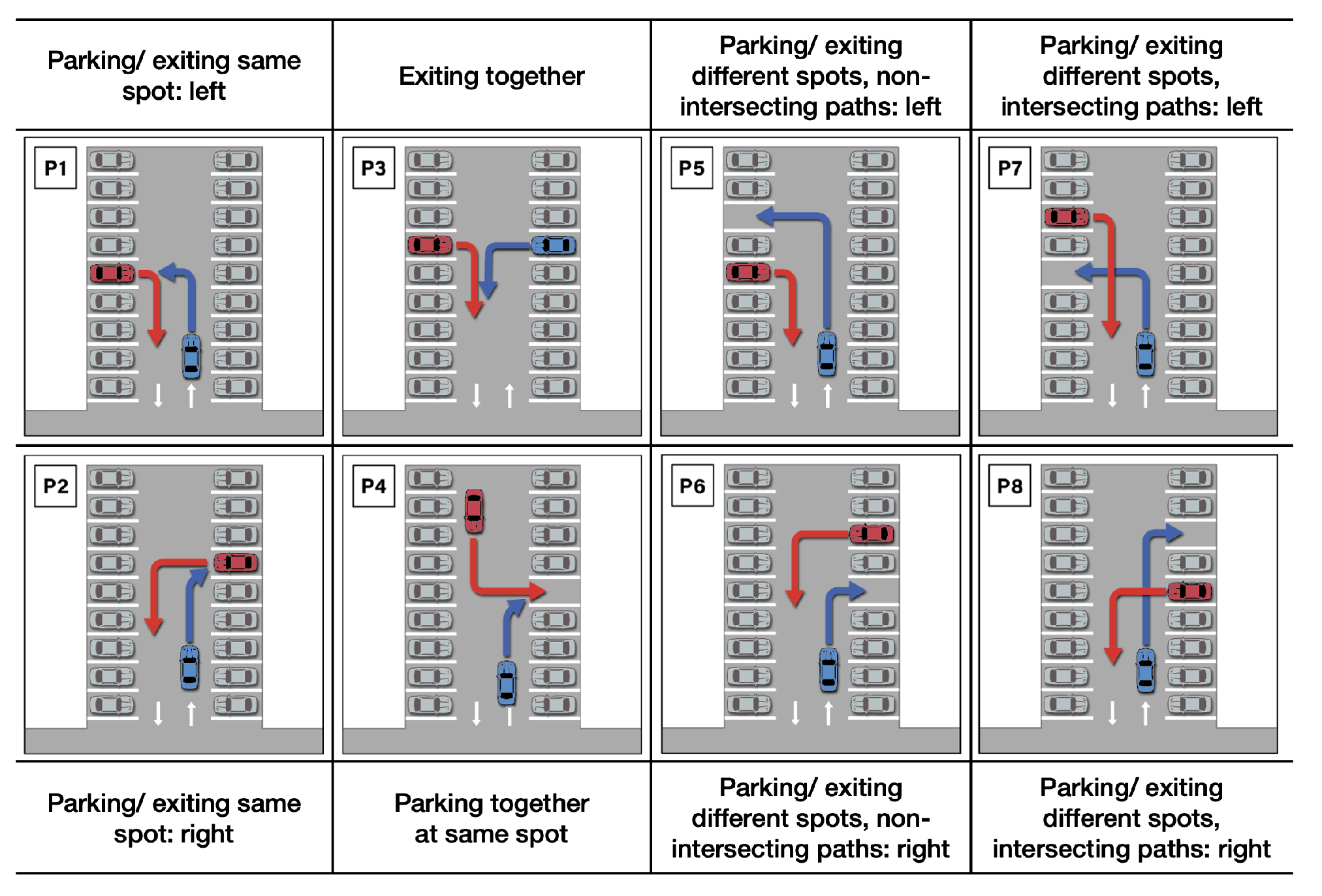
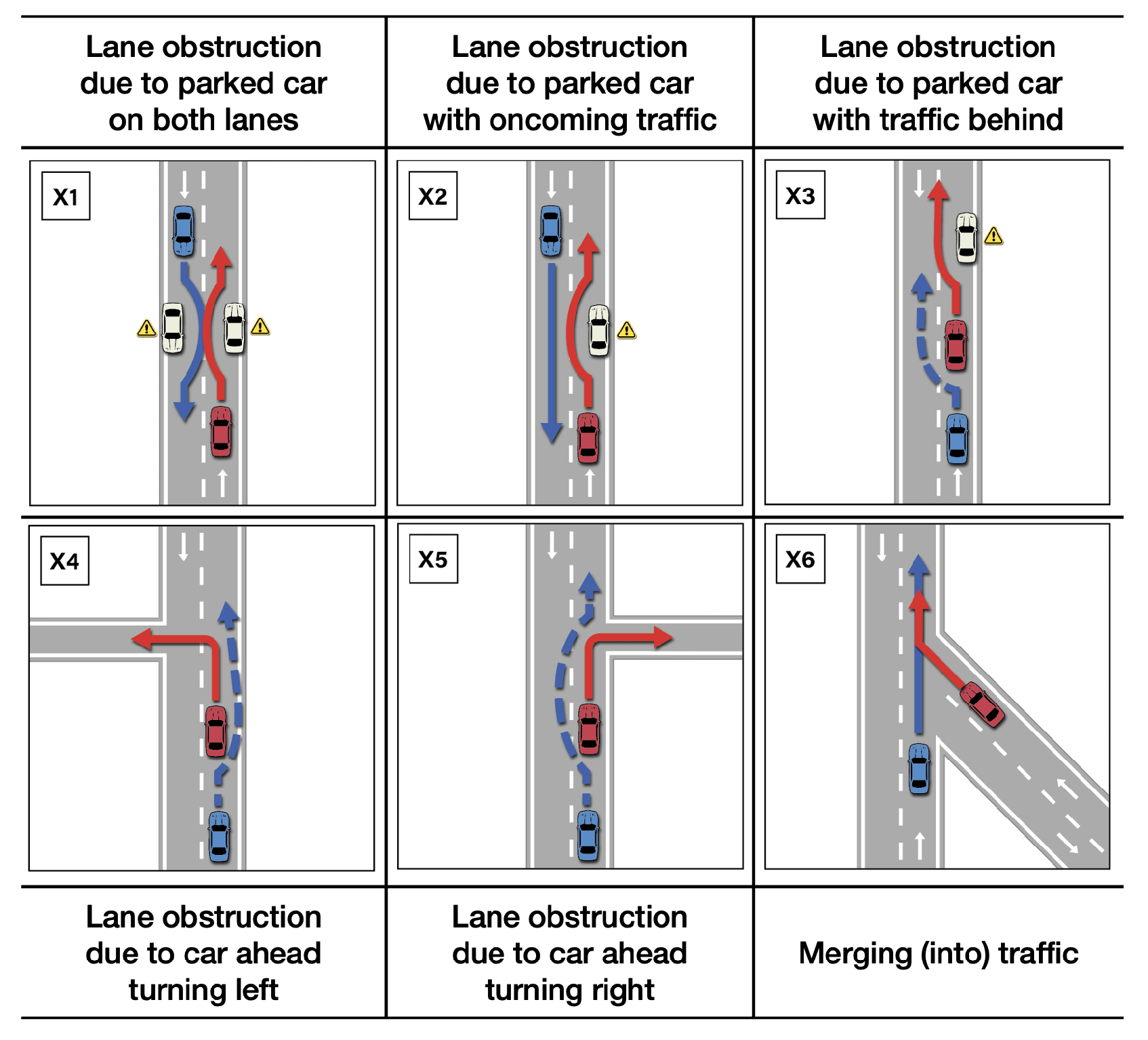
Besides the figures mentioned above, which are full-factorial designs of dyadic interactions between two drivers, or one driver and one pedestrian at an intersection, we also included several other interaction scenarios in the appendix.
Figure A3 and
Figure A4 highlight non-exhaustive combinations of interaction scenarios in a parking lot and other non-intersection on-road situations respectively for two drivers, and
Figure A7 and
Figure A8 do the same for driver-pedestrian encounters. We hope that these scenarios can function as a reference point for the research community to compare, benchmark, rationalize, and choose appropriate scenarios to scope downstream interaction studies.
4.1.3. Sample Size and Participant Diversity
Determining an appropriate sample size depends heavily on the specific research question and the effect sizes of the dependent variables under investigation. While larger sample sizes enhance statistical power, smaller, more focused samples may provide greater depth and richer qualitative insights, particularly in exploratory or user experience-focused studies. We emphasize the importance of balancing breadth with depth, depending on the study’s objectives. For instance, when investigating nuanced behaviors or capturing outlier interactions, qualitative methods such as in-depth interviews, longitudinal observations, and reflective exercises may yield more actionable insights than statistical analyses alone. These approaches are particularly valuable for understanding the subjective experiences and motivations that underpin traffic interactions, which may not be fully captured through objective behavioral measures.
Regarding participant diversity, we highlight the importance of ensuring representative samples that reflect the demographic and cultural variability of road users. This includes accounting for not only differences in age, gender, driving experience, and familiarity with autonomous vehicle systems, but also cultural norms that influence interaction behaviors. Studies aimed at exploring cross-cultural differences or generalizing findings across regions should prioritize participant diversity to ensure ecological validity and inclusivity. In some cases, smaller sample sizes (e.g., 5–10 participants) may be appropriate for generating deep, qualitative insights, particularly in the early stages of research or when piloting new frameworks. Conversely, larger sample sizes (e.g., 30+ participants) may be warranted for studies requiring robust statistical comparisons or generalizability. Ultimately, the choice between breadth and depth should align with the research question and the study’s goals. Incorporating iterative study designs that combine both approaches—e.g., qualitative insights from smaller, exploratory studies that inform the design of larger-scale quantitative studies—can ensure that both depth and representativeness are achieved over the course of investigating a research question.
4.2. Interaction Approach: Vignettes vs. Drives
Centering on the methodological decisions involved when setting up a study that incorporates multiple scenarios, each designed to provoke different interactions, we outline two primary approaches:
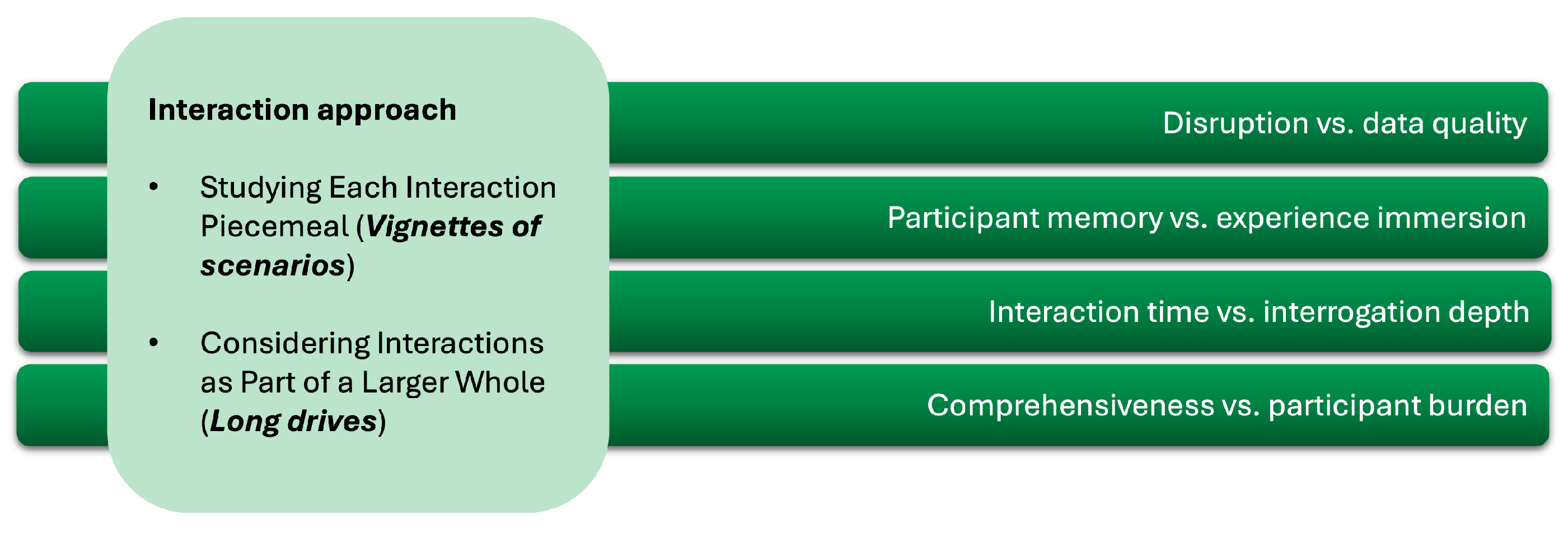
Studying Each Interaction Piecemeal (Vignettes of scenarios): This approach involves examining each interaction in isolation, which allows for detailed analysis but may limit the generalizability of the findings to broader contexts.
Considering Interactions as Part of a Larger Whole (long drives which can contain multiple interactions that flow into one another): This method views individual interactions as components of a more extensive system, aiming to understand the cumulative and emergent effects of multiple interactions.
The choice to connect scenarios or treat them as standalone depends largely on the research questions researchers aim to address. While connected scenarios can offer insights into sequential interactions and context continuity, standalone scenarios focus more on isolated behaviors under controlled conditions. Deciding whether to use controlled vignettes or more naturalistic drive scenarios depends on the study goals. Vignettes allow for controlled manipulation of specific variables and easier replication of scenarios, making them suitable for isolating specific interaction effects. In contrast, naturalistic drives provide richer, more holistic data that reflect real-world driving conditions, which is beneficial for studying more complex, emergent behaviors. If research objectives require precise control over environmental variables and interaction parameters, controlled vignettes of interactions may be preferable over more naturalistic, longer drive scenarios. Vignettes allow experimenters to manipulate interactions more deliberately to isolate and study specific encounters and simplify replicating scenarios, ensuring consistency across multiple trials.
However, implementing vignettes of scenarios involves significant trade-offs, particularly in balancing the controlled environment with the degree of naturalism. Coordinating interactions meticulously to ensure precise timing can make the scenarios feel less natural, potentially affecting the behavior of participants. This artificial setup might be necessary to achieve the study’s goals but does come at the cost of reduced realism. Moreover, issues such as motion sickness, especially triggered by the start-stop nature of vignettes, need to be managed. This factor can influence participant comfort and the overall quality of data collection. The duration of each trial and the overall study also require careful consideration. The length of interactions and the number of trials per session must be balanced to maximize efficiency without overwhelming participants. This balancing act affects how many scenarios we can realistically fit into each session and the total duration of the study.
These considerations highlight the complexity of designing and executing traffic interaction studies. A conclusion from our brainstorming is that each choice, from scenario type to session length, involves strategic decisions that impact the study’s effectiveness and the integrity of its conclusions, and are dictated by several factors, which we classify broadly under:
Disruption vs. Data Quality: Techniques that interrupt an experience to query a participant significantly disrupt the scenario, potentially altering participant behavior and responses due to the unnatural pause and interrogation. If this may fundamentally influence and impact the data pertaining to the research question being studied, vignettes are not an option and the interaction approach must constitute a long drive.
Memory vs. Immersion: Delaying questions to post-interaction can reduce the immediate disruptive impact, but at the risk of diminished recall accuracy. Participants may forget crucial details or modify their memories based on post-scenario reflection. However, if it is crucial to get as accurate and detailed a feedback on an interaction immediately or soon after it has taken place, the vignette approach is ideal.
Interaction Time vs. Interrogation Depth: The more time spent interrogating participants, the less time is available for actual interaction scenarios. This trade-off is particularly acute in studies with limited time resources. Extensive questioning can exhaust the time that could otherwise be used to run additional scenarios or explore different interactions. However, if it is important that participants experience an uninterrupted and immersive experience in the world to spend time tackling different kinds of interaction, a long drive setup is ideal.
Comprehensiveness vs. Participant Burden: Extensive (and repetitive) questioning can provide more comprehensive insights but may also place a greater cognitive or emotional burden on participants, potentially affecting their performance and the quality of the data collected. In lengthy traffic interaction studies, participants might experience boredom, simulator sickness, or wish to quit early. Particularly when recruitment costs are high, vignettes offer a solution by allowing researchers to salvage partial data from interactions already completed if a participant withdraws. This approach maintains data integrity and usability, which is not feasible with continuous long drives. Therefore, choosing between vignettes and long drives should consider the risk of participant withdrawal and the importance of preserving partial data.
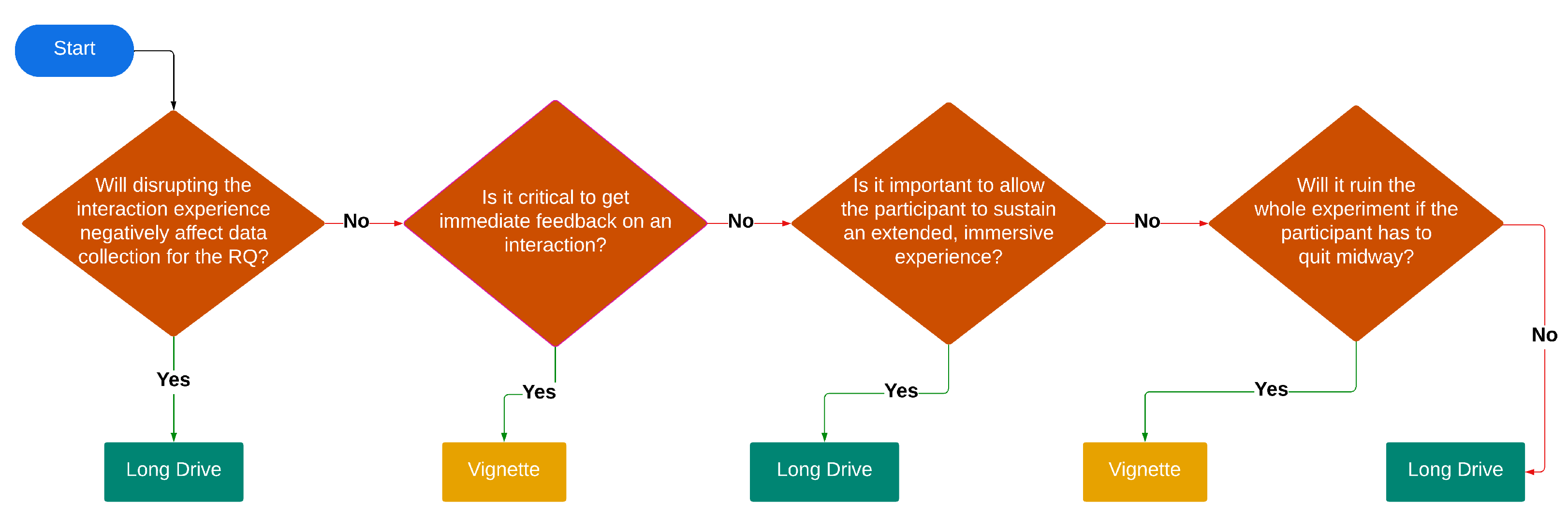
These factors are captured in
Figure 3, and the flowchart in
Figure 4 guides the determination of whether a Vignette or Long Drive setup if ideal for a study. This also has direct influence on the measures used for the study, as we elaborate in the next section.
4.3. Measures
When designing traffic interaction studies, one of the key elements is selecting the appropriate behavioral measures. These measures are crucial for capturing the dynamics of participant interactions and understanding the underlying mechanisms of their behavior, especially in terms of their awareness and responses in different traffic scenarios. Behavioral measures in traffic interaction studies typically include objective measures such as Reaction Time (how quickly a participant reacts to changes in the traffic environment, such as the sudden appearance of a pedestrian or a car braking abruptly), Eye Tracking (to determine where participants are looking during an interaction, indicating what they are paying attention to and their level of situational awareness), physiological indicators (heart rate, galvanic skin response, etc., characterizing internal state and stress), and Decision Making (assessments of the choices participants make in response to specific scenarios, which can include lane changes, speed adjustments, or navigational decisions). Experimenter-driven subjective data resulting from passive observation & coding, or real-time psychological monitoring can also prove useful in providing insights on the participant state.
However, each of these traditional measures from controlled engineering-psychology studies, while providing valuable insights, also comes with inherent limitations. Reaction Time can be difficult to accurately assess in studies where the environment is highly dynamic and participants have significant freedom in how they respond. The lack of control over the independent variable and the presence of many confounding factors can make it challenging to isolate the specific impact of a stimulus on reaction time. Secondly, while eye tracking is a powerful tool for understanding where participants direct their attention, it does not always correlate directly with situational awareness (SA). The phenomenon of “looked but failed to see” [
53] illustrates this limitation—participants may physically look at an object or scenario but may not process it meaningfully, leading to discrepancies between where their eyes are pointed and what they actually perceive or are aware of. Analyzing decisions made by participants can reveal how they respond to specific scenarios, but does not provide insights into the underlying reasons for those decisions. And lastly, methods such as passive observation & coding or real-time psychological monitoring might be affected by experimenter bias, and might not reflect or elucidate the underlying reasons behind specific participant behavior. Without understanding the motivations or cognitive processes that drive decision making, it is difficult to use these data to infer deeper behavioral patterns or to predict future behaviors under different conditions. Moreover, the analysis must be designed to handle the complexity of these data, acknowledging that simple causal inferences are often insufficient. In response to these challenges, it is crucial for studies to employ a suitable combination of measures and to integrate qualitative insights where possible. For instance, incorporating follow-up interviews or questionnaires can help elucidate the reasoning behind participants’ decisions, providing context that quantitative measures alone might miss.
To address this, it becomes necessary to ask participants directly. This interrogation can be conducted in various forms, such as after or during the interaction, each with its own implications. Post-interaction interviews, i.e., asking participants to recall their experiences and decisions after the fact can lead to issues with memory decay or recall bias. Participants might forget details or reconstruct their memories inaccurately. On the other hand, real-time interrogation, i.e., interrupting the interaction to ask participants about their awareness can provide more immediate and potentially accurate responses. However, this method can disrupt the flow of the interaction and take people out of the scenarios both experientially and cognitively, potentially altering the naturalness of their behavior and affecting the results.
For example, one of the critical challenges is accurately measuring participants’ workload, emotional state, situational awareness, and attitudes without compromising the naturalistic integrity of the scenarios. Tools like the NASA-TLX [
54] (workload and cognitive effort), SAM [
55] (emotion and valence), and SAGAT [
56] (situation awareness) provide structured methods to query participants’ awareness at specific moments by pausing the scenario and asking targeted questions. However, this approach has significant trade-offs in terms of naturalism, as it can disrupt the flow of interaction and remove participants from the immersive experience of the scenario. An alternative approach is to use an in-situ tool that allows querying the desired metric without disrupting the immersion of the experience and preserving naturalism. Examples for such tools for the case of situation awareness include the Daze methodology proposed by Sirkin et al. [
57] or SPAM (Situation Present Assessment Method) [
58], which uses a more seamless questioning technique in a continuous manner. Employing other efficient questioning techniques such as auto- and allo-confrontation during review of video replay of interactions [
59] can help balance the depth of interrogation with the need to keep the scenarios running smoothly—participants can reflect on their or others’ actions and attitudes by watching their performance, which can mitigate some of the issues with memory-based distortions. However, these subjective measures are also not without their own biases and can compromise data integrity.
Ultimately, designing an interaction study involves carefully considering these trade-offs to balance the need for rich, accurate data with the goal of maintaining a realistic and engaging participant experience. Deciding whether to prioritize depth of understanding in a few scenarios over breadth in many depends largely on the specific research questions and the resources available. Each choice impacts not just the quality of the data collected but also the overall validity and reliability of the study’s findings.
4.4. Timing and Coordination of Interactions
Regardless of which scenario is chosen for the study, and whether they are presented as vignettes or a sequence of encounters within a long drive, timing is a critical challenge in traffic interaction studies. This is particularly important when attempting to orchestrate interactions between participants who have varying degrees of freedom and autonomy, such as the speed at which they choose to drive or walk. Ensuring that these interactions occur as planned without stripping participants of their autonomy requires a nuanced approach to study design. The risk is that if the interaction occurs too early or too late, the intended encounter either does not happen or does not yield useful data. Forcing these interactions effectively, without making the control measures overly apparent to the participants, is indeed a subtle yet critical aspect of study design.
To manage the timing of interactions effectively, experimenters may resort to strategies that delay or control the start of an action. This can be achieved through instructions, i.e., providing participants with specific directions on when to start their movement. This might include explicit verbal instructions, navigation cues, or auditory signals like a beep to prompt the initiation of walking or driving. Alternatively, environmental artifacts or elements within the interaction space (such as strategically placed bus stops or buildings) can serve to naturally delay or obscure a participant’s view, thereby aligning their timing with the study’s needs. These artifacts help create realistic scenarios where participants encounter each other as they naturally would, but within a controlled timing framework.
Another approach to address this challenge is the implementation of what might be termed “time morphing”. This technique involves manipulating the timing of environmental cues that influence participant behavior. For instance, a traffic light could be programmed to change at specific times to orchestrate the desired interactions at intersections. As an example, in a simulated urban traffic study, imagine two drivers approaching an intersection from perpendicular directions. Rather than setting a fixed moment for their encounter, the simulation can continuously monitor each driver’s speed and trajectory. If one driver is slightly behind schedule, the system can subtly delay a traffic light change or adjust a pedestrian crossing cue by a fraction of a second. This slight, real-time modification—i.e., time morphing—ensures both drivers arrive at the intersection simultaneously, thus creating a natural yet controlled interaction scenario without overtly disrupting the simulation’s flow. Essentially, this method does not fix the traffic light in a specific spatial/ physical position in the environment, but rather its spawning location in a virtual world can be adjusted based on the timing necessary to ensure that interactions occur as planned. This kind of manipulation allows for a flexible yet controlled setting where interactions can be orchestrated more naturally without participants feeling overtly controlled or guided. By adjusting environmental factors such as traffic light timings in response to real-time participant movements, researchers can subtly guide participants into the desired interactions, enhancing the study’s naturalism and the reliability of its results.
In our experience, however, these interventions come with trade-offs. The most significant is the impact on naturalism. In timing or forcing interactions, naturalism can only be aspired to, but never reached. When participants are aware of being controlled or feel restricted by the setup, their behavior might not accurately reflect their responses in real-world conditions. This awareness can lead to altered driving or walking behaviors, potentially skewing the study’s results. Thus, while these methods help achieve the desired synchronization of interactions, they must be employed judiciously to maintain a balance between control and natural behavior. When employing vignettes (see
Section 4.2), it might be more optimal to use instruction and event-based triggers to actuate the start of an interaction between participants. On the other hand, in long drives, small differences in driving or walking speed magnify over time, and instruction or event-based triggers become increasingly complex and untenable, necessitating the time-morphing approach. Ensuring that the study conditions remain as realistic as possible while achieving the necessary experimental control is a delicate balance that requires careful planning and consideration.
5. Discussion
The methodological framework we present in this paper is designed to help researchers operationalize traffic interaction studies, formalizing key design decisions that might be made and trade-offs that should be considered in selecting scenarios to test.
By laying out these considerations clearly, we aspire to motivate the community to use existing multi-participant simulators [
43,
44,
45,
46,
47,
48,
49] to better understand the rich array of dyadic interactions that Markkula et al. outlined [
10]. The theoretical contributions of our work are situated within the framework of a clarified understanding and foundation of the practicalities on conducting experimental studies on traffic interactions. This is vital as it offers both quantitative and qualitative structures that are instrumental in advancing the state of the art of research on vehicle automation.
For this discussion, we would like to highlight points about traffic interaction studies that we have come to understand over the course of designing studies in this domain. We offer these as subjective impressions, open to discussion from others in the community, but we note them in part because we are discovering that these types of studies form a major departure in the experimental paradigms many of us have expertise in.
5.1. Interaction Studies vs. Experimental Psychology Studies
Interaction studies in the context of traffic dynamics present a distinct challenge compared to more traditional experimental psychology studies. While experimental psychology typically involves controlled manipulations with a focus on observing and measuring clear, direct responses, the goal in interaction studies in traffic environments should be to elicit data about the behavioral complexities of interactions, as well as their consequences.
5.1.1. Degrees of Freedom
The “openness” in the design of interaction studies is needed to capture natural interaction, and leads to a significantly higher level of complexity due to the numerous variables and the dynamic nature of interactions among participants. Interaction studies inherently include multiple degrees of freedom (see e.g., [
50,
60]. This creates a rich, complex dataset but also introduces substantial variability that can obscure straightforward cause-and-effect relationships.
5.1.2. Statistical and Analytical Challenges
Given the complexity and interconnected nature of the data collected in traffic interaction studies, simple analytical techniques like ANOVA (Analysis of Variance) commonly used in psychology-style studies may not be sufficient to describe the key insights from an interaction study. These traditional methods often assume independence among variables, an assumption which is frequently violated in interaction studies where multiple factors are inherently interdependent.
5.1.3. Need for Advanced Techniques
To adequately analyze data from interaction studies, more sophisticated statistical techniques or machine learning models are often required. These models can handle multiple inputs and account for interdependencies among variables, making it possible to untangle the complex web of factors that influence behavior. Techniques such as multivariate regression, structural equation modeling, or even deep learning algorithms (see e.g., [
61,
62,
63,
64]) could be suitable to address the complexity of interaction studies.
5.1.4. Heuristic vs. Computational Outcomes
The key outcomes of traffic interaction studies might not be the “useful design heuristics” that we have come to expect from psychology-style human factors studies. Rather than a clean predictive explanation of the effect that independent variables will have on dependent variables in similar contexts, we expect more complicated dependencies of behavior; for example, there are many instances of people employing various strategies to avoid interacting, sometimes speeding quickly to the intersection to try to race across before the other car will arrive and then slowing down dramatically on the approach to the intersection when they realize they will not make it across the intersection before the other car will arrive. Computational models offer a more robust framework for exploring these complex, dynamic and interdependent behaviors, and do a better job of providing predictive information that accounts for the myriad interactions occurring within the study. The computational models are as useful and valid as an outcome to an experimental study as a heuristic finding. Employing advanced machine learning techniques—such as multivariate regression, structural equation modeling, or deep learning approaches to better account for the non-linear and high-dimensional aspects of traffic interactions can have potential benefits. While our goal is not to prescribe a specific solution (as the selection of the most appropriate approach should depend on the specific context of each study), it is important highlight that augmenting conventional methods with these advanced techniques could offer deeper insights.
5.2. Regional and Cultural Differences
One objection that might be raised about traffic interaction studies is that the outcomes are likely not to be “generalizable”. It would be surprising if the outcomes of a traffic interaction study run in Dallas, Texas would yield the same outcomes as the same study run in Mumbai, India. However, we point out that this is not a weakness of traffic interaction studies, but rather a strength; traffic interactions in Mumbai are highly different from those in Dallas, Texas, and it is important that AV designers know about and can plan for the difference (see e.g., [
65,
66,
67]. The methodological framework we proposed is designed to focus on the behavioral dynamics inherent to specific “classes” of encounters rather than the contextual specifics of road geometry or cultural norms. For example, while the layout of an intersection may vary between urban settings in North America, Europe, and Asia, the fundamental dynamics of yielding behavior, right-of-way negotiation, and space-sharing conflicts remain consistent within the same class of interaction scenarios [
68,
69,
70,
71]. By prioritizing these behavioral dynamics over contextual details, the framework ensures that the novelty effects observed are attributable to the interaction itself rather than to variations in context. Furthermore, the scenarios presented in the framework are intentionally abstracted to be recognizable across diverse cultural and regional settings. This abstraction facilitates cross-contextual applicability while allowing researchers to adapt specific elements—such as road signage, vehicle types, or traffic density—to better reflect the local conditions being studied. Future studies could validate the framework by comparing its outcomes across multiple cultural contexts, exploring how localized adaptations influence interaction behaviors. By emphasizing behavioral universality within distinct encounter classes and supporting regional customization, the framework provides a flexible yet robust tool for studying traffic interactions globally. This approach ensures its relevance and applicability in diverse cultural and geographic settings.
5.3. How Should We Look at Interaction Studies?
The complex ways that people interact in traffic interaction studies might be as interesting to ethnographers or behavioral scientists as AV designers; they show, better than heuristic findings do, some of the richness and variety social scientists are often trying to draw attention to in everyday road life [
1,
19,
72]. These dyadic traffic interaction studies can help us to more adequately discover how often different patterns that social scientists note happen give the contextual priors of scenario.
One limitation of traffic interaction studies is that, while they help elicit how people will respond to different scenarios, they do not address how often any of these scenarios occur. In addition, they are designed to collect a range of “normal” driving interactions and behaviors. However, this work does not necessarily address the question of corner case scenarios or how interactions will unfold in critical incidents [
73]. It is necessary to consider traffic interaction studies in conjunction with other research methods, such as critical incident analysis (see e.g., [
74], to understand the conditions and outcomes of failures or near-misses, which can provide crucial insights for improving safety and design.
5.4. Balancing Naturalism and Control in VR Environments
While highly controlled environments allow for precise manipulation of variables and reproducibility, they risk diminishing ecological validity if participants perceive the scenarios as overly artificial. To mitigate this, several strategies may be used to simulate naturalistic behaviors effectively within VR environments. First, incorporating realistic environmental elements such as traffic flow, pedestrian density, and dynamic weather conditions can enhance the immersion of participants. Second, using adaptive algorithms to simulate the behavior of non-player agents (e.g., vehicles or pedestrians) ensures that their responses are contextually appropriate and resemble real-world interactions. These strategies help create a believable setting that encourages participants to engage naturally. Additionally, the design of interaction prompts can be subtle to maintain the flow of naturalistic behavior, as elaborated in
Section 4.2 and
Section 4.4. For example, instead of explicit instructions or scripted cues, participants can encounter interactions organically through well-placed environmental triggers, such as the timing of traffic lights or the positioning of obstacles. This approach minimizes the intrusion of experimental control while preserving the natural dynamics of traffic interactions. The extent of naturalism required depends on the specific research question. Studies focusing on high-level behavioral patterns may tolerate slightly reduced naturalism in exchange for control, while those examining fine-grained decision-making processes may prioritize ecological validity.
5.5. Addressing the Conundrum of Operationalizing Interaction Studies
The choice among these methodologies and trade-offs reflects a fundamental conundrum in traffic behavior research: Should the focus be on rare but critical events, or should it be on the everyday non-critical interactions that constitute the majority of experiences? There is no simple heuristic or one-size-fits-all answer to this question. Instead, the decision on which analytical approach to use should be driven by the specific aims and contexts of the research question. Researchers must consider what they hope to achieve with their analysis. The answer to these questions will guide the choice of setup and analytical methods. By highlighting these options and their trade-offs and offering this framework, we aim to equip researchers with the knowledge to choose the most appropriate method for their specific needs, fostering a deeper understanding of traffic dynamics and contributing to more effective interventions and designs.
Given that it is not possible to address all traffic interaction in one study, the methodologies and insights presented in this paper are intended to enhance the transparency, replicability and quality of traffic interaction research. By simplifying the setup and execution of interaction studies, we make it feasible for more researchers to engage in this field. The framework presented in this paper can aid both authors and reviewers in operationalizing and describing interactions in traffic research. By emphasizing the critical trade-offs and decisions that need to be made for a successful study design, we also urge the authors to report these aspects in their publications. Considering the many trade-offs while designing a traffic interaction study, one concrete prioritization strategy we propose involves adopting a multi-criteria decision analysis (MCDA) framework [
75,
76]. In this approach, candidate scenarios are evaluated against several criteria that capture both experimental objectives and resource constraints, such as relevance to the research question, feasibility, cost and resource demand, and data richness. By assigning weights to these criteria based on the specific priorities of the study (e.g., if resources are limited, feasibility and cost might be weighted more heavily), each scenario can be scored and ranked. This quantitative scoring system would facilitate transparent and systematic decision-making, ensuring that the selected scenarios maximize scientific impact while remaining within practical limits. Although this proposal is conceptual at this stage, we believe that its empirical application in pilot studies would further refine its utility and effectiveness.
While prior work (e.g., [
11,
50,
51,
52]) has provided valuable guidelines for analyzing road user behavior or methodologies focusing on specific scenarios, these approaches often lack a holistic framework for designing controlled studies that address critical experimental decisions and trade-offs. In contrast, our framework bridges this gap by offering a structured approach to operationalizing traffic interaction studies, emphasizing scenario selection, decision-making processes, and strategies for managing experimental constraints.
Our primary contribution of this paper is theoretical and methodological [
77], providing a conceptual lens to guide traffic interaction studies. While the framework we present is not intended to serve as an empirical artifact; rather, it aims to act as a tool for organizing and understanding the complexities of dyadic traffic interactions. It outlines the key trade-offs and decisions in designing controlled traffic interaction studies providing a roadmap by articulating key trade-offs and design considerations for designing traffic interaction studies. However, we refrain from than prescribing specific, one-size-fits-all solutions, as the implementation of these trade-offs is inherently dependent on the unique research questions and contextual constraints of each study. Future research could build on our insights by exploring tailored integrations within simulation environments and AV testing protocols, thereby operationalizing these considerations in specific, context-dependent ways.
The examples provided in the appendices outline plausible use cases for the framework, offering initial guidance for its implementation in controlled settings. These examples serve to bridge the gap between theory and practice and lay the groundwork for subsequent empirical investigations. By clarifying the practical steps and considerations involved in setting up interaction studies, we hope to help researchers design and implement their experiments more efficiently and effectively. Overall, our work contributes to the broader field of traffic research by providing tools and concepts that help bridge the gap between theoretical models and real-world applications. This not only aids in understanding current traffic dynamics but also assists in the development of future interventions and improvements in traffic management and safety systems. However, we note that this work is derived from expert brainstorming sessions and does not include an empirical validation at this stage. Future work should involve applying this conceptual guide in real-world experimental settings, thereby scaffolding this guide and providing empirical validation based on actual implementation outcomes. Implementing controlled pilot experiments in both simulated and real-world traffic environments to assess the feasibility of our guide, refine its components, and evaluate its predictive validity can turn this conceptual guide into a robust framework or tool that addresses practical constraints and research objectives, ultimately supporting its integration into broader traffic interaction research.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}