1. Introduction
Construction machinery occupies a critical role within the construction industry, with heavy-duty equipment like excavators and dump trucks being essential for both large-scale earthmoving and precise grading of sites. These machines are increasingly demonstrating enhanced versatility through the adoption of specialized attachments and modifications, effectively being used to conduct the majority of earthwork operations on modern construction sites. In response to this trend, manufacturers of construction equipment are actively pursuing the development of more sophisticated and high-performance machinery, leveraging advancements such as high-efficiency engines and optimized hydraulic systems to enhance operational productivity. Moreover, the recent commercialization of mass-produced, low-cost lithium-ion batteries is accelerating the development and deployment of fully electric construction equipment, thereby offering a promising pathway towards mitigating carbon emissions within the sector. These technological advancements are poised to contribute significantly to improved productivity and environmental sustainability in construction practices [
1].
Despite the numerous advancements within the heavy machinery industry, operator skill remains a paramount factor influencing productivity in earthwork operations. The performance of heavy machinery such as excavators is intrinsically linked to the proficiency and experience of its operator [
2,
3]. Historically, earthwork operations were predominantly executed through manual control, demanding that operators rely on their accumulated experiential knowledge and honed physical skills to manipulate the machinery effectively. However, the advent of sophisticated technologies has paved the way for the development of machine guidance systems and their implementation in excavator operations [
4]. These systems typically integrate a variety of sensors, satellite navigation systems (e.g., GNSS), and powerful onboard computer systems to provide operators with real-time positioning and guidance information. This technological assistance enhances the operator’s ability to perform tasks with greater accuracy and efficiency. The market penetration of this technology is substantial; modern earthmoving equipment is increasingly being sold with integrated machine guidance and control systems. For instance, Komatsu’s Intelligent Machine Control (iMC) technology is available on selected dozer and excavator models, enhancing efficiency and accuracy in operations [
5]. This trend underscores the industry’s growing recognition of the significant potential of machine guidance systems to revolutionize earthwork operations by optimizing productivity and precision.
The primary advantage of machine guidance lies in its ability to provide operators with real-time visual or auditory feedback, ensuring adherence to design specifications, particularly relating to grade and elevation requirements. Furthermore, these systems can automate the control of the excavator’s end-effector motion and position, enabling it to autonomously follow pre-defined excavation paths or profiles. Research conducted in the United States has indicated that the implementation of machine guidance systems in earthwork operations can lead to productivity gains of up to 50% [
4]. Further substantiating this claim, recent investigations based on controlled field experiments have measured improvements in productivity resulting from the adoption of machine guidance systems, reporting these to be as high as 47% [
6]. This evidence collectively highlights the substantial potential for machine guidance technology to optimize operational efficiency within the earthworks industry.
While both manual and machine-guided excavation operations offer distinct advantages, their underlying operational principles differ significantly. It is hypothesized that the provision of precise, real-time guidance relating to excavation targets can modify and improve operator activity. For instance, operators may exhibit faster and more decisive movements when relying on visual and/or audio feedback from the guidance system. Although an increase in productivity is anticipated, there remains a lack of empirical research and field testing specifically quantifying improvements in operator activity under machine guidance. To understand the mechanisms through which machine guidance enhances operator efficiency, micro-level analysis comparing manual and machine-guided excavation is necessary. Previous studies demonstrating significant productivity increases using 30 min comparative trials were limited by variations in excavator specifications, manufacturers, and operators’ skill levels, thus confounding the results [
7].
Therefore, this study included a controlled experiment to compare the differences in operator activity between manual and machine-guided excavator operations. For this purpose, an excavator was deployed on a real construction site where actual footing foundation excavation was performed. To investigate the efficiency of operational tasks and changes in operator activity, in-depth analysis was conducted, encompassing metrics such as excavation duration, cycle time, and movement of the boom arm and tracks, and quantitative scoring of bucket fill factors. Through this analysis, the current study aimed to quantify the extent of behavioral modification induced by machine guidance and provide empirical evidence of the system’s impact on operators’ actions. The results will not only contribute to a deeper understanding of the man–machine interaction in the context of advanced construction equipment but also offer insights into how to encourage more proactive utilization of machine guidance by operators, ultimately enhancing its effectiveness in practical settings.
2. Literature Review
2.1. Guidance Systems and Behavioral Changes in Task Execution
The use of guidance systems in excavator operations clearly affects operator action, leading to improved efficiency and encouraging more decisive, confident action. Providing clear guidance during the task reduces uncertainty, which has a strong influence on how operators behave. This effect can be explained by several well-known theories that connect information, goals, feedback, and mental workload to performance outcomes.
Goal-setting theory [
8] states that specific, challenging goals improve performance by focusing attention, increasing effort, and encouraging better planning. Also, self-efficacy, i.e., a person’s belief in their ability to reach these goals, promotes confidence and bolder decisions [
9]. Machine guidance systems used in excavator operations provide precise targets for excavation depth. This clear definition of goals, representing a key part of goal-setting theory, significantly improves operators’ focus and confidence in their own actions, leading to a more assertive approach. Also, feedback intervention theory [
10] further explains how timely and specific feedback can direct attention and affect performance. Real-time feedback enhances self-efficacy, enabling people to adjust their actions effectively [
9]. Machine guidance systems offer this kind of real-time feedback regarding excavation depth, allowing operators to constantly check their progress against the goals. This continuous feedback loop, as described by feedback intervention theory, enables ongoing adjustments, promotes a more assertive approach to the task, and makes the workflow more efficient. This strengthens the operator’s belief in their ability to achieve the desired results, further reinforcing confident actions, as goal-setting theory also suggests.
In addition, prospect theory [
11] helps us understand how uncertainty affects decision-making. It suggests that people tend to avoid risks when they see potential for gain but are more willing to take risks when facing potential losses. In excavation, the clear and reliable information provided through machine guidance can make a task seem like a potential gain. Reducing uncertainty through the use of accurate data on depth and trajectory, these systems may lessen operators’ aversion to potential losses, allowing them to work more confidently and efficiently. Operators can focus on achieving the desired outcome instead of worrying about making mistakes, which encourages more assertive actions. Finally, research on automation and human performance that was carried out by Parasuraman and Riley is relevant to understanding the benefits of machine guidance [
12]. They argued that while automation can reduce mental workload and improve efficiency, it can also lead to problems like over-reliance and loss of skill if it is not implemented carefully, and they emphasized that successful automation depends on user trust and system transparency. By providing reliable data, the use of machine guidance systems in excavator operations can support decision-making and reduce the mental effort required. This environment, with a lower cognitive load and better situational awareness, allows operators to perform their tasks with greater precision and confidence, leading to more assertive control inputs and improved efficiency. However, it is important to address the potential downsides mentioned by Parasuraman and Riley and to make sure that these systems are designed in a way that encourages operator engagement and maintains their skills.
Real-time feedback provided by MG systems can significantly modify operator actions during excavation, leading to more systematic bucket-loading patterns, reduced redundancy of movement, and efficient progression through the phases of excavation. These behavioral modifications are quantitatively evidenced by consistent fill factor scores and lower dig counts compared with conventional methods. Based on the theoretical framework presented, it is hypothesized (H1) that integrating guidance systems into excavator operations can significantly improve performance. Specifically, the provision of clear goals, real-time feedback, and reliable data through these systems is expected to enhance overall operational efficiency, as measured by metrics such as cycle time, bucket fill factor, and frequency of repositioning during excavation.
This hypothesis was empirically tested to determine the extent to which machine guidance positively influences operator behavior and performance in real-world excavation tasks.
2.2. Machine Guidance in Earthworks Operations
Over the past several decades, widely ranging strategies have been developed for the control of heavy construction equipment, from conventional manual methods to highly advanced automated systems.
Table 1 presents a comparative overview of four key approaches to excavation control—conventional, machine guidance, remote control, and fully automated— and summarizes their operational approaches, quality control methods, and key enabling technologies. Conventional methods rely on direct human operation and traditional surveying techniques, whereas GNSS and IMU-based machine guidance systems have recently experienced significant adoption due to their ability to provide real-time feedback and enhanced precision. In addition, remote control technologies are increasingly being used in challenging environments, such as sites that are remote or hazardous, and fully automated systems leveraging robotics and artificial intelligence are beginning to emerge.
Numerous studies have investigated the potential benefits of automation and machine guidance systems for construction equipment, particularly in the context of earthwork operations. Relevant research conducted in the United States indicates that contractors and subcontractors utilizing automated machine guidance technologies anticipate a range of benefits [
4]. These anticipated advantages are multifaceted and encompass a variety of operational improvements. Specifically, users expect the implementation of these technologies to contribute to a reduction in the number of workers, which is a crucial factor in enhancing overall workplace safety. Furthermore, it is anticipated that decreases in the time taken to complete activities will lead to more efficient execution of projects. In addition to these improvements in speed and safety, the adoption of automated machine guidance is projected to result in improved quality control and quality assurance, ensuring a higher standard of construction outputs. Ultimately, these combined factors are expected to enhance overall operational efficiency, streamlining workflows and optimizing resource allocation.
Research specifically regarding excavator automation has indicated that integrating intelligent systems into existing mining excavators can enhance safety, productivity, and energy efficiency [
13]. Intelligent excavators typically incorporate an in-cab monitor that provides real-time status updates and guidance to operators, alongside a remote monitoring portal. Data are collected from a suite of sensors, including ruggedized cameras overlooking the bucket, high-resolution surveillance cameras, radar, arm-geometry sensors, hydraulic pressure monitors, and sensors for measuring electric motor power. Although the concept of the intelligent excavator has been explored by researchers in various countries, including Korea [
2,
14,
15,
16] and Japan [
17], its practical implications and commercial viability remain unclear, and no fully commercialized intelligent excavators are currently available. The Built Robotics company introduced a prototype autonomous excavator in 2019, although their subsequent focus has shifted towards specific applications like automated solar piling and trenching [
18]. This strategic pivot suggests an acknowledgement of the inherent complexities and unstructured nature of general earthwork operations, which pose significant challenges for full autonomy.
Further research in the field has explored the use of artificial neural networks trained on human-labeled video frames to perform object localization within the excavator’s operational environment [
3,
13]. This technology has been applied to monitor the wear and breakage of ground engaging tools, detect foreign objects within the bucket, analyze the size distribution of excavated material, and automatically provide guidance to the operator via the in-cab monitor. A review of the literature identified at least fifteen relevant research studies focusing on intelligent excavators, with many demonstrating high accuracy in classification of activities, often exceeding 90%. This suggests the potential for machine learning to play a significant role in future automation of excavators.
Furthermore, recent research has increasingly focused on optimizing earthworking equipment [
19], developing sensor-based automated construction [
20], implementing automated quality control technologies in the field [
21], and enhancing the safety and operability of heavy machinery on construction sites [
22,
23,
24]. These studies have primarily aimed at improving working conditions, process consistency, and overall safety rather than directly increasing operational productivity. Although semi-automated operations such as machine control have been successfully applied in certain specialized construction tasks, machine guidance in practice remains the most widely utilized productivity-enhancement technology. Consequently, this study focuses on machine guidance as a means to directly enhance excavator operator actions at the micro-level, providing a quantitative evaluation of its impact on excavation efficiency in real-world construction settings.
Collectively, previous studies have indicated that machine guidance systems can provide operators with various types of feedback and guidance, potentially modifying operator activity and improving the overall productivity of excavations. While it is evident that machine guidance can lead to more productive earthwork operations, and productivity gains have been reported in numerous studies, a detailed understanding of how machine guidance specifically affects operator behavior and task performance at the micro-level remains an open research question. To address this gap, this study investigated the differences between conventional and machine-guided excavation through a comparative study conducted in a controlled construction environment. By providing an identical task to operators using each of the two methods, this research aimed to isolate the specific impacts of machine guidance on operator activity and quantify its influence on task efficiency. The following section describes the methods used in the current study; synchronized video capture, real-time GNSS data, and on-site surveys were employed to measure operator activity, enabling rigorous comparative analysis of conventional and machine-guidance-assisted excavation under controlled field conditions.
3. Methods
3.1. Machine Guidance System
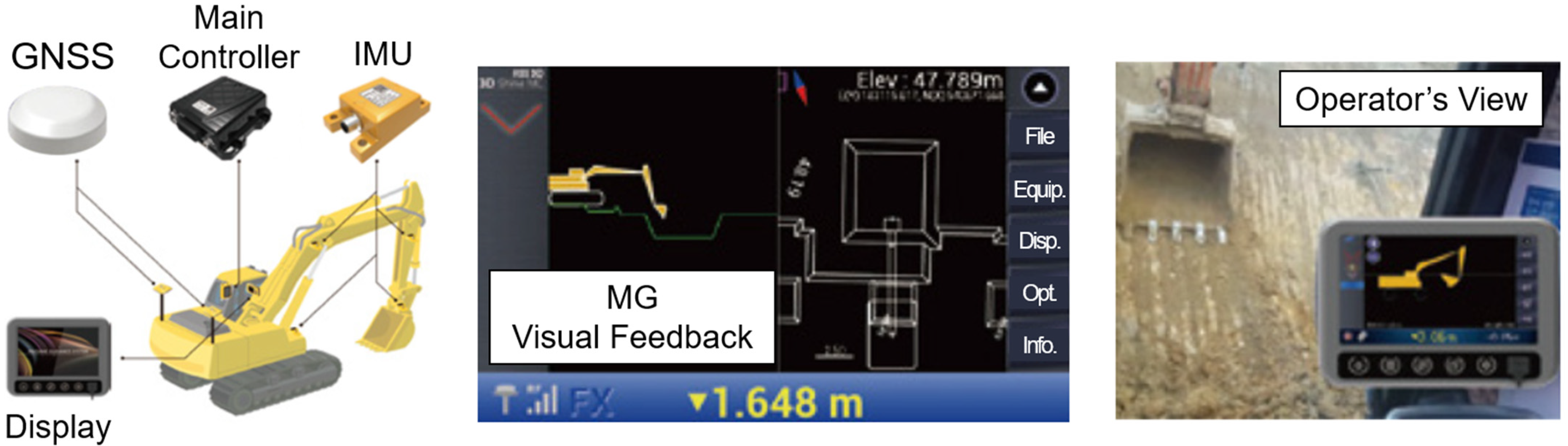
A machine guidance (MG) system provides visual and/or audio feedback to assist the operator in achieving precise excavation. Various MG systems are available on the market, including laser scanner–receiver systems, sonar-based systems, and the most advanced RTK GNSS-assisted systems. In this study, an MG system utilizing two GNSS receivers and IMUs (inertial measurement units) was installed on the excavator.
Figure 1 presents the architecture of the MG system. It illustrates how GNSS and IMU data are integrated through a sensor fusion module, followed by real-time data processing and the generation of both visual and auditory feedback for the operator.
Unlike conventional methods, the MG system provides real-time feedback—primarily through visual cues—that allows operators to accurately assess the current level of the earthwork without the need to communicate with a signal person. This capability is known to reduce downtime during earthwork operations and minimize human error during level surveying. The technical specifications of the system were as provided by Youngshine D&C [
25]. To operate the 3D GNSS-based MG system, a 3D reference model of the excavation target was created and loaded into the system. This model served as a benchmark to guide the excavation process.
3.2. Experiment Setting
Given the constraints of conducting controlled field experiments in an active construction environment, a within-subject pilot test design was employed. Due to the high costs associated with operating heavy machinery and the need to minimize interference with ongoing construction activities, the experiments were conducted in a single day using one excavator. Although this approach inevitably limited the sample size, it enabled direct comparison of machine guidance and conventional methods under identical conditions. By carefully controlling the external variables, this study maximized experimental rigor compared with previous research.
To ensure comparability between the MG and conventional methods, extensive measures were taken to control external variables. All experiments were conducted at the same construction site under identical field conditions, using the same excavator and operator. Standard conventional excavation methods were strictly adhered to, and the trials were scheduled during optimal weather conditions. These steps ensured that the differences in operator activity and excavation efficiency were primarily attributable to the machine guidance system rather than extraneous factors.
3.2.1. Conventional Excavation
The experiment took place on a construction site in Hwaseong, Gyeonggi Province, South Korea, in November 2021. The weather was clear, with temperatures ranging from 2 to 6 degrees Celsius. A 30-ton excavator (Hyundai CE HX 300A, Seongnam, Republic of Korea) was used for the experiment. Two cameras were installed, one inside the excavator cabin and one outside, to capture video footage. The experiment involved excavating a total of eight footings, four using the conventional method and four using machine guidance. The conventional excavation task was conducted using a crawler-type excavator with the assistance of a signal person equipped with a hand-held GNSS receiver. The study area corresponded with the site’s natural ground conditions, and the soil properties were typical. The excavation area comprised four 4 × 4 m square footings, with a depth of 1.2 m and 1:0.2 side slopes, as shown in
Figure 2.
Four spray markers were placed at the corners of the foundation to serve as visual reference points. At the beginning of the task, the signal person verbally instructed the operator. The operator then proceeded with the excavation. When ready for depth verification, the operator signaled using the horn, prompting the signal person to measure the depth at the designated control points using GNSS. The remaining areas for excavation and the excessive excavation depths were marked on the ground with red spray paint, providing feedback to the operator. The operator continued the excavation, making adjustments based on the markings, until the signal person confirmed that all the target depths were met, by marking 0 (or the required depth) at the control points. Once the excavation was deemed complete, the signal person provided a hand signal to indicate task completion, as shown in
Figure 3.
3.2.2. MG Excavation
Prior to starting the MG excavation, a 3D model of each 4 × 4 m footing was created using specialized design software (e.g. Autodesk Civil 3D etc.) and uploaded to the excavator’s onboard system. This model contained precise depth (1.2 m) and slope (1:0.2) data that guided the operator in real time. The machine guidance setup included dual GNSS receivers mounted on the boom and the counterweight, along with inertial measurement units on the excavator body. These sensors collectively provided positioning and orientation data to the system, which was calibrated by aligning the bucket’s reference point with known coordinates on the ground. Once calibration was complete, the 3D model was overlaid with live excavator data, allowing the operator to see exactly how far to dig and at what angle to maintain the required slopes. During the excavation process, a screen inside the cabin displayed a color-coded interface indicating the bucket’s vertical distance from the target depth. Real-time updates alerted the operator if the bucket approached or exceeded the design grade, helping to reduce over-excavation.
3.3. Measurement Metrics
To quantitatively compare the excavation performance between MG excavation and conventional excavation, several key metrics were measured and analyzed. These metrics provided insights into excavation efficiency, operator action, and excavation patterns under different guidance conditions.
3.3.1. Excavation Time
The total excavation time was recorded from the moment the operator began digging until the excavation was completed according to the specified design criteria. The time required for depth verification and corrective excavation (if necessary) was also included in the total excavation duration. This metric captured differences in efficiency between MG and conventional excavation methods.
3.3.2. Frequency and Location of Excavator Relocation
During the footing excavation, the operators often repositioned the excavator to optimize reach and maintain accuracy. Two aspects of relocation were measured: relocation frequency and relocation pattern. Relocation frequency referred to the number of times the excavator was moved to a new position during excavation. Relocation pattern referred to the spatial distribution of relocation events, which was analyzed to identify common repositioning zones within the 4 × 4 m area. This analysis was used to determine whether MG guidance influenced how the operators approached the excavation in terms of their movement strategy.
3.3.3. Volume of Excavated Material per Cycle
To analyze excavation efficiency at the cycle level, the volume of soil removed per bucket cycle was assessed using a fill factor scoring system (
Table 2). The system categorizes each bucketload based on its fill percentage relative to the bucket’s total capacity. This system allowed quantitative comparison of excavation behavior between MG and the conventional method to determine whether MG guidance led to more consistent and optimal bucketloads per cycle. Note that correction of over-excavation via backfilling with soil was assigned a score of -1, reflecting the inefficiency introduced by such corrective actions.
Figure 4 illustrates representative examples of each fill factor score. To ensure objectivity in the scoring process, five independent researchers evaluated the fill factor in all the excavation cycles. The most frequently selected score among the evaluators was chosen as the representative score for each instance of excavation.
3.3.4. Excavation Pattern Analysis
To further explore how MG systems influenced the excavation strategy, excavation trajectories were recorded and analyzed based on several key characteristics. The excavation sequence was examined to determine the order in which different areas within the foundation were excavated. Additionally, the digging approach was assessed to identify whether operators followed a systematic layer-by-layer excavation method or a less structured approach. The frequency of corrective actions, including adjustments to excavation depth through either the removal of excess material or backfilling, was also analyzed. By comparing these excavation patterns, this study aimed to assess whether MG guidance can contribute to a more systematic, efficient, and precise excavation workflow compared with conventional excavation methods.
4. Results
In this experiment, excavation of the four footings using the conventional method required a total of 3650 s, whereas the machine guidance method completed the same task in 2652 s, demonstrating a 27.3% reduction in excavation time. Additionally, the conventional method required 68 excavation cycles, while the machine guidance method completed the excavation in 57 cycles, resulting in a 16.2% reduction in the number of excavation cycles. This efficiency gain was further reflected in the fill factor scoring results. The average fill factor score for the machine guidance system (mean = 3.47) was 0.43 points higher than that for the conventional method (mean = 3.04), indicating more efficient excavation (
Table 3).
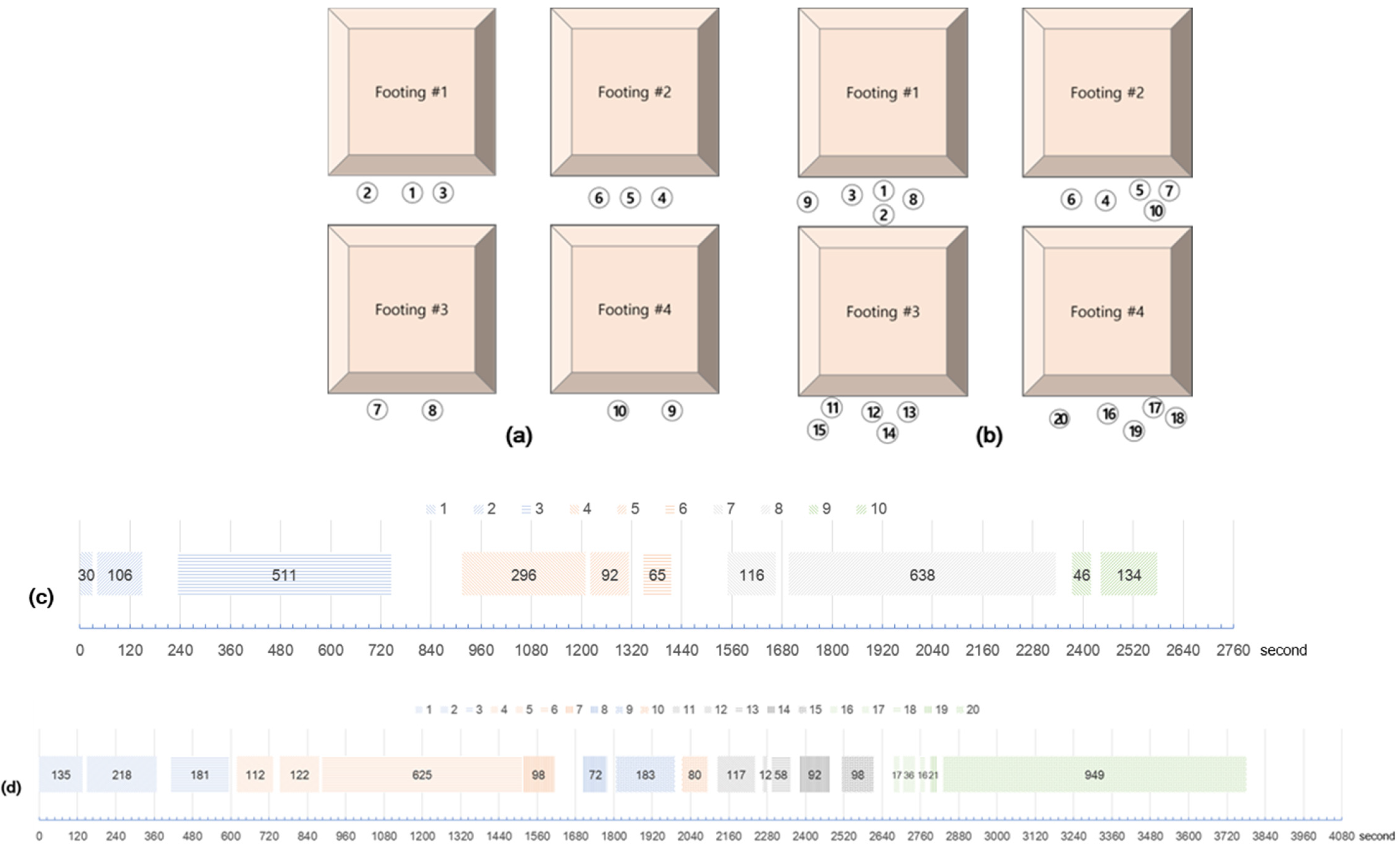
A significant difference was observed in the relocation patterns of the excavations between the conventional and machine guidance methods. Under the conventional method, the operator relocated the excavator 20 times across the four footings, frequently adjusting its position to verify the excavation depth manually. In contrast, the MG excavation required only 10 relocations, reducing the number of positional adjustments by 50%. Additionally, the time spent at each excavation position varied considerably between the two methods. The average duration spent per location with the conventional method was 184 s, while the MG method included a significantly higher average duration of 224 s per location, indicating that the MG enabled the operator to remain in position for longer periods, performing more continuous and controlled excavation before repositioning was required.
The relocation data further emphasized the operational advantages of MG. The conventional method required four to five relocations per footing, whereas the MG method required only two to three relocations per footing, representing an approximate 40% reduction in movement frequency (
Figure 5a,b). The necessity of frequent repositioning under the conventional method stemmed from the limited ability to perform fine grading at extended reach, requiring the operator to adjust the positioning frequently to maintain control over the excavation depth. Furthermore, time-distributed excavation patterns illustrated in
Figure 5c,d shows that the MG method not only reduced relocation frequency but also shortened the duration of excavation at each point, with the machine operating efficiently for longer periods from a single position. While both methods encountered similar challenges when leveling at extended distances, due to constraints relating to the hydraulic cylinder and boom-arm articulation, MG significantly mitigated this issue. The real-time depth guidance appears to have provided the operator with greater confidence in reaching the target level, reducing unnecessary repositioning while maximizing the use of the excavator’s full work envelope.
The time spent per relocation position also differed between methods. MG allowed the operator to remain in position for an extended duration, efficiently completing the excavation before relocating, whereas the conventional operator frequently paused, received verbal instructions, adjusted the excavation, and re-verified the depth, leading to shorter but more frequent stays at each position.
The analysis of excavation workflow patterns further highlights the operational advantages of MG technology. In the conventional approach, the operator frequently had to stop excavation, receive verbal feedback from the signal person, and re-excavate incorrectly dug areas, resulting in inefficient excavation sequences. On the other hand, the MG system continuously provided real-time feedback, allowing the operator to make immediate corrections to depth or slope without external assistance. Moreover, the excavation trajectory analysis revealed that MG excavation followed a more structured and predictable sequence, with the excavation carried out in well-defined layers. Conversely, the conventional method showed greater variability in dig patterns, with operators often revisiting previously excavated areas to make corrections. This discrepancy suggests that MG promoted a more systematic and efficient excavation strategy.
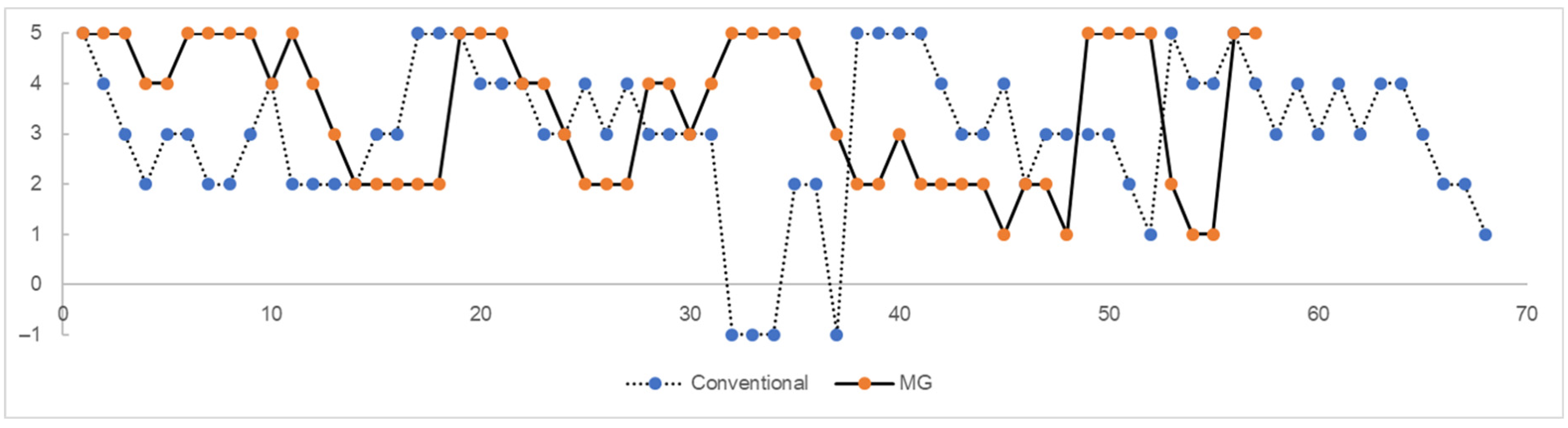
The fill factor analysis revealed distinct differences in excavation action between the conventional and machine guidance methods (
Figure 6). The MG operator consistently achieved higher fill factor scores per bucketload, maintaining five points for extended periods within each footing. Toward the final leveling stage, the score decreased to one or two points, reflecting fine adjustments carried out to achieve precise excavation depth before immediate transition to the next footing. In contrast, the conventional method exhibited greater variability in fill factor scores, initially with a high fill factor score of five points, followed by a progressive decline that included two, three, and four points, forming a distinctive W-shaped excavation pattern before reaching the fine leveling stage.
To better illustrate the trends in fill factor score,
Table 4 summarizes the fill factor scores and dig counts for both the MG and conventional methods, broken down into the early, mid, and final phases of excavation for each footing (Footing #1 to Footing #4). These data offer a more granular view of how each method performed at distinct stages of the excavation process. Overall, MG tended to produce higher fill factors in the early to mid stages of excavation, followed by a reduction in the final phase as the operators performed finer leveling. By contrast, the conventional method showed greater variability; the fill factor values oscillated more sharply, and dig counts often exceeded those of MG, indicating the need for repeated adjustments.
Statistical analyses were conducted to compare the performance outcomes, specifically, the fill factor scores, between the conventional (n = 68) and MG (n = 57) groups. Independent samples t-tests, with variance heterogeneity assessed via Levene’s test, revealed a statistically significant difference in mean scores between the two groups (t = −2.63, p = 0.01). Furthermore, non-parametric Mann–Whitney U tests confirmed a significant difference in median values (U = 1435.0, p = 0.009), with the use of MG resulting in significantly higher fill factor scores compared with the conventional approach. These findings demonstrate that the implementation of MG produced a notable improvement in performance metrics, underscoring its potential impact in practical applications.
Additionally, over-excavation occurred more frequently with the conventional method, as evidenced by the necessity of backfilling operations, which were assigned a fill factor score of −1. This issue was notably observed at Footing #2, where the signal person identified excessive excavation depth requiring corrective backfilling. Such corrections not only increased the excavation time but also reduced overall efficiency. These patterns suggest that MG excavation can enable faster and more confident excavation as the operator receives continuous real-time feedback, eliminating the uncertainty associated with traditional signal-based verification. This ability to consistently maintain a high fill factor without excessive corrections indicates that MG can enhance operator confidence and precision, leading to more efficient excavation.
5. Discussion
The results indicate that machine guidance technology significantly improved excavation efficiency, primarily by reducing unnecessary relocation and enhancing the accuracy of each excavation cycle. The 27.3% reduction in excavation time and the 16.2% decrease in excavation cycles highlight the impact of real-time feedback on operator behavior, enabling more precise and continuous excavation. Furthermore, the relocation analysis suggests that frequent repositioning negatively impacted overall efficiency. The operators using the conventional method had to reposition twice as often as those using MG, largely due to manual verification of excavation depth and the need for corrective action. This additional movement contributed to the increased cycle time and disrupted the excavation workflow.
Another critical factor influencing excavation performance is the fill factor. The higher average fill factor score (3.47) for the MG excavation compared with the conventional excavation (3.04) demonstrated that the MG enabled operators to achieve more consistent and optimal bucketloads per cycle. This improvement was associated with reduced occurrence of under-excavation, minimizing unnecessary corrections and rework. From a practical standpoint, these findings suggest that machine guidance systems can enhance not only excavation speed but also the consistency and accuracy of operators’ actions. The structured excavation pattern observed in the MG excavation further supports this, showing that real-time feedback can promote a methodical approach that reduces unnecessary variation in excavation depth.
A noteworthy field observation emerged when the operator, having seemingly completed Footing #1 using the conventional method, proceeded to Footing #2 but was later required to return to Footing #1. A subsequent manual survey revealed that the target depth had been incorrectly met, necessitating additional excavation and backfilling. This rework scenario represents a common challenge in contemporary construction settings, where survey personnel are not always available to carry out continuous on-site measurements. For instance, in this study, the surveyor was occasionally occupied with tasks such as operating a small compactor, limiting the frequency and immediacy of feedback provided to the excavator operator. Without real-time feedback, operators may proceed with lower confidence, potentially leading to over- or under-excavation that becomes apparent only when a surveyor is again able to check the depth. By contrast, the MG in this study offered continuous real-time feedback, enabling operators to verify depth on the spot and make immediate corrections, thereby reducing the likelihood of discovering errors long after moving on to a subsequent footing. This improvement is especially relevant under labor-constrained conditions, where surveyors must multitask and their intermittent availability delays feedback. Consequently, MG not only streamlines excavation but also mitigates the need for rework cycles and travel between multiple footings, addressing a practical limitation in construction sites where human resources are stretched thin. These findings suggest that the real-time feedback afforded by MG can substantially reduce operator uncertainty and improve overall workflow continuity, even in the face of limited on-site survey support.
Overall, this study demonstrates that MG can improve excavation efficiency by reducing relocation frequency, optimizing digging cycles, and enhancing the accuracy of excavations. These benefits highlight the potential of MG to streamline excavation operations, reduce dependency on labor, and boost overall site productivity. Future studies should further explore the impact of MG on fuel consumption and operator fatigue to provide a more comprehensive understanding of its benefits in construction applications. The current results also showed that the real-time feedback provided by MG significantly improved excavation efficiency. The higher and more consistent fill factor scores for the MG excavation indicate that operators were able to execute more precise and confident excavation cycles, thereby reducing the need for corrective rework. This was in contrast with the conventional method, where a W-shaped excavation pattern emerged as the operators cautiously avoided over-excavation, ultimately leading to longer excavation times.
Furthermore, the reduced frequency of relocation demonstrates that MG enabled the operators to maximize excavation from a single position, thereby reducing machine downtime and unnecessary repositioning. The demonstrated ability to excavate confidently at extended reach without relying solely on close-range manual verification suggests that MG improved the measurement of depth and the accuracy of leveling, further diminishing the need for frequent repositioning. The observed differences in excavation behavior indicate that MG encourages a more assertive and systematic excavation strategy. Unlike the conventional method—where the operators frequently adjusted the excavation depth out of caution—the MG users exhibited greater confidence in reaching the target depths, completing tasks more efficiently with fewer interruptions.
Real-time feedback played a critical role in this enhanced performance. It enabled the operators to continuously adjust the bucket trajectories, by providing immediate, accurate information about depth and slope. This facilitated rapid corrections during excavation, minimized redundant passes, and ultimately led to fewer excavation cycles and improved fill factor stability. The mechanism effectively reduced both overshooting and undershooting of the target excavation profile, ensuring more efficient and precise operation. This implies that MG is not only able to reduce excavation time and cycle counts but also minimizes the need for constant manual verification, making it particularly beneficial for projects requiring precision excavation, such as preparation of foundations or trenching operations. While this study did not directly evaluate operator learning curves, the excavation patterns observed in Footing #4 suggest that the MG operators completed the final footing faster and with greater precision, indicating increasing familiarity and confidence in the system. Future studies should further investigate the potential learning effects of MG systems on excavation efficiency over longer timeframes.
6. Conclusions
This study investigated the impact of machine guidance (MG) on excavation efficiency by comparing conventional and MG footing excavation processes. The experimental results provide clear evidence that the MG system significantly improved excavation performance by enhancing accuracy, reducing relocation frequency, and optimizing workflow continuity. The findings reveal that MG excavation reduced total excavation time by 27.3% compared with the conventional method. This efficiency gain was attributable to the more precise excavation cycles, as indicated by the higher average fill factor score. The ability to maintain a higher fill factor for extended periods suggests that MG can enable more confident and controlled excavation, minimizing unnecessary corrections and rework.
Another key observation was the relocation pattern. The MG system reduced the number of relocations by approximately 40%, allowing operators to remain in position for longer durations while efficiently completing excavation. In contrast, the conventional method required frequent repositioning to verify the excavation depth manually, disrupting the workflow continuity. The data also suggest that the MG operations were more assertive in their excavation strategy, reaching target depths more quickly and transitioning to fine leveling phases with minimal hesitation. Furthermore, the trajectory analysis demonstrated that the MG excavation followed a structured and predictable pattern, while the conventional excavation exhibited a W-pattern, reflecting cautious adjustments to avoid over-excavation. This cautious approach adopted in the conventional excavation often led to inefficiencies, with some instances requiring backfilling due to over-excavation, adding additional time and effort to the process. The real-time feedback provided by MG played a crucial role in these performance improvements. By continuously displaying the depth information, MG eliminated the need for manual verification by a signal person, reducing interruptions and allowing operators to execute tasks with greater certainty. Additionally, while both excavation methods faced challenges in performing precise leveling at extended boom-arm reaches, the MG operators exhibited greater control and confidence in their adjustments, demonstrating the system’s potential to enhance precision even under difficult excavation conditions.
Despite the promising results, several limitations of the present study must be acknowledged. Due to the inherent challenges of conducting controlled experiments in an active construction environment—such as the high operational costs of heavy machinery and the need to avoid interference with ongoing construction activities—the sample size was necessarily limited. The within-subject pilot test design, while effective in controlling external variables, may not fully capture the variability present in larger-scale or multi-day operations. These constraints limit the generalizability of the current findings. Future research should aim to overcome these limitations by expanding the sample size, conducting multi-site experiments over longer time periods, and exploring the application of machine guidance systems across a broader range of construction tasks. Additionally, incorporating qualitative methods such as operator interviews and field observations could offer further insights into the decision-making processes and subjective experiences associated with machine guidance.
From a broader perspective, these findings suggest that MG systems are not only able to enhance excavation efficiency but can also reduce operator workload and reliance on external guidance. By minimizing the need for frequent repositioning and manual depth verification, MG technology can improve overall site productivity, particularly in large-scale earthwork projects where efficiency and accuracy are critical. While this study demonstrates the operational benefits of MG, further research is needed to explore additional factors influencing performance, such as fuel consumption, operator fatigue, and long-term learning effects. The excavation patterns observed in Footing #4 suggested that the MG operator became more efficient over time, indicating a potential learning curve that could further optimize performance in extended operations. Future studies should also investigate the application of MG across various soil conditions, excavation types, and machine configurations to assess the broader applicability of these findings. Additionally, integrating sensor-based automation and AI-assisted excavation planning could further enhance precision and reduce operator intervention, paving the way for fully autonomous excavation systems.
Future research should also expand on the present findings by exploring the impact of machine guidance systems on a broader range of construction operations in addition to footing excavation. For example, continuous tasks such as slope grading and trench excavation may present unique challenges and opportunities for leveraging real-time feedback. In addition, qualitative studies including operator interviews and field observations could provide deeper insights into the subjective experiences and decision-making processes of operators, further elucidating how machine guidance influences performance. Such multifaceted investigations will help to validate the current results across different types of earthworks and contribute to a more comprehensive understanding of automation’s role in enhancing both productivity and safety in diverse earthwork environments.


 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}