1. Introduction
The inertial navigation system (INS) is an autonomous navigation system that operates on the principles of Newtonian mechanics, measuring the acceleration of an aircraft in an inertial reference frame to calculate its velocity, displacement, attitude, and heading angle through integration [
1,
2,
3]. During operation, INS offers several advantages such as not radiating energy externally, independence from external data, and immunity to electromagnetic interference, leading to its extensive use in aircraft and rockets. Advanced countries have consistently regarded INS as a critical technology, strongly supporting its development and optimization while maintaining strict control over related technology and products [
4,
5,
6].
The concept of a hybrid INS was proposed by academician Feng Peide in 2015 [
7], integrating a physically stabilized platform using digital servo control with a mathematically computed platform based on strapdown attitude calculations. Functionally, the hybrid INS not only isolates angular movements of the carrier, as a conventional INS does, but also achieves rotational capability, which enables inertial devices to rotate relative to the navigation frame, thereby enhancing error modulation [
8].
Compared to a traditional platform-based INS [
9] and “self-contained” INS [
7], the hybrid laser INS introduces unique features in both principle and structure that impact its performance accuracy. This system presents numerous technical challenges such as the dual-frequency dithering characteristics of the laser gyroscope, which complicates stability control. Achieving optimal control performance requires an ideal design for the rotational mechanism and an understanding of its structural and mechanical transfer properties, providing a suitable operating environment for angular motion isolation under high-dynamic conditions. In the hybrid laser INS, the relative positioning between the inertial measurement unit (IMU), the rotational frame, and the base continuously changes, especially in high-overload and impact environments, affecting INS accuracy. This necessitates an in-depth analysis of the mechanical characteristics of the hybrid laser INS under high dynamics and overload conditions.
Components such as the base, platform, and inner and outer frames are essential to the hybrid laser INS, where their static and dynamic properties critically affect the system’s accuracy and stability [
10]. Under mechanical conditions involving high overloads and severe impacts, structural elastic deformation can lead to deviations in the INS body coordinate system from the virtual coordinate system [
11]. Therefore, structural elements such as the base, platform, and frames must exhibit high static and dynamic performance to ensure the accuracy and reliability of the hybrid INS [
12]. During operation, the INS endures complex vibrational loads; when the frequency of these external vibrations is close to the natural frequency of structural elements, resonance can occur, severely impacting the accuracy and stability of the INS and even causing potential damage to the entire measurement system [
13]. Additionally, the frames bear the weight of the platform and gyroscopes, causing deformation. Consequently, requirements for rigidity, strength, dimensions, and tolerances in components such as the base, platform, and frames are stringent. The stability of the reference coordinate system within the inertial measurement system is heavily influenced by factors such as structural deformation, angle sensor accuracy, motor control precision, and gyroscope accuracy. However, improving angle sensor accuracy, motor control precision, and gyroscope accuracy is often costly and complex. Hence, enhancing structural rigidity and strength to reduce elastic deformation under high overload and impact conditions, thereby minimizing deviation of the INS body coordinate system from the virtual coordinate system, is the most direct approach.
Scholars have conducted extensive research on improving structural rigidity in INSs. For instance, Huang Yitao et al. [
14] applied finite element analysis to assess and optimize the static and vibrational modes of an INS frame to enhance rigidity and anti-vibration performance. Similarly, Zhang Su et al. [
15] performed mechanical tests on aluminum–lithium alloy 8090, using the results to simulate and iteratively optimize the finite element analysis of an aluminum–lithium alloy platform in a strapdown INS.
In addition to structural optimization, material selection significantly impacts structural performance [
16]. Traditional materials such as aluminum alloys are commonly used for structural components, such as the base, platform, and frames, in hybrid INSs. However, with advancements in new composite materials, inertial measurement systems have entered a phase characterized by “high precision”, “miniaturization”, and “extended service life”. In this phase, the inherent limitations of traditional materials, such as low rigidity and dimensional instability, have become prominent obstacles to achieving high-precision INSs. Therefore, the use of new materials is essential for the progress of inertial technology and military equipment. Aluminum matrix composites, which offer the benefits of being lightweight and possessing high elastic modulus and high dimensional stability, have become crucial in aerospace applications and are widely used in antennae, skins, and support structures for aircraft [
17,
18,
19,
20,
21].
Traditional inertial measurement device analysis and optimization generally rely on deterministic system parameters and optimization models, using classical deterministic methods for model solutions [
22,
23]. However, in engineering practice, uncertainty factors are inevitably present in the parameters of the base, platform, and inner and outer frames of inertial measurement devices, such as geometric parameters, measurement errors, and material properties. Although these uncertainties are typically minor, the nonlinear nature and multi-system coupling of the inertial measurement system can cause significant fluctuations in structure or system performance, potentially preventing it from fulfilling its intended function and even leading to serious consequences. There are two main approaches to addressing these uncertainties: (1) minimizing or controlling their range by enhancing component precision and reducing tolerance bands during manufacturing, although uncontrollable factors may limit the effectiveness of this approach; (2) mitigating the impact of uncertainties on structural performance, aiming to make performance less sensitive to these variations and to ensure high reliability [
24].
Conventional reliability analysis methods include approximate analytical methods, numerical simulation, and surrogate models, all applicable to hybrid inertial measurement system reliability analysis [
25]. The approximate analytical method mainly refers to the first-order reliability method (FORM) [
26] and the second-order reliability method (SORM) [
27], which estimate failure probability by linearizing the failure boundary at the design point. However, these methods require explicit mathematical models of the inertial measurement system and perform poorly in highly nonlinear problems. The numerical simulation approach, primarily the Monte Carlo method [
28], uses a set number of samples to obtain response values and calculates failure probability based on these samples. Although the accuracy of this method improves with sample size, the computational and time costs are substantial, especially for complex precision systems such as inertial measurement systems, where obtaining failure samples is costly and impractical for large datasets. Therefore, surrogate models are commonly employed in engineering to improve computational efficiency. Surrogate models use limited sample points to predict outputs in real time, reducing the need for computationally intensive finite element simulations or physical model calculations. Popular surrogate models include response surfaces [
29], neural networks [
30], and Kriging models [
31]. Among these, the Kriging model is widely used for its strong predictive ability and limited constraints, achieving the required precision with fewer samples and enhancing computational efficiency [
32].
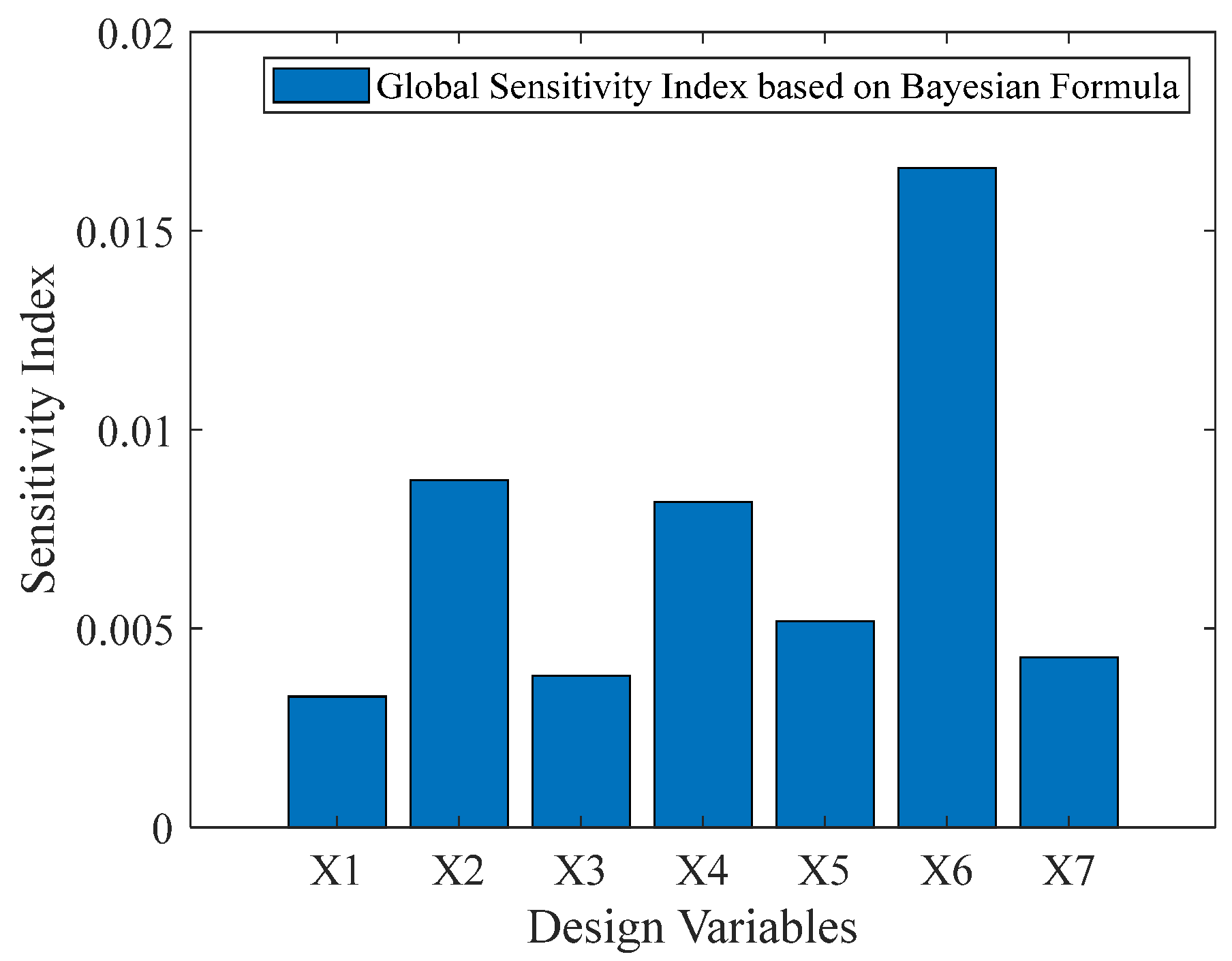
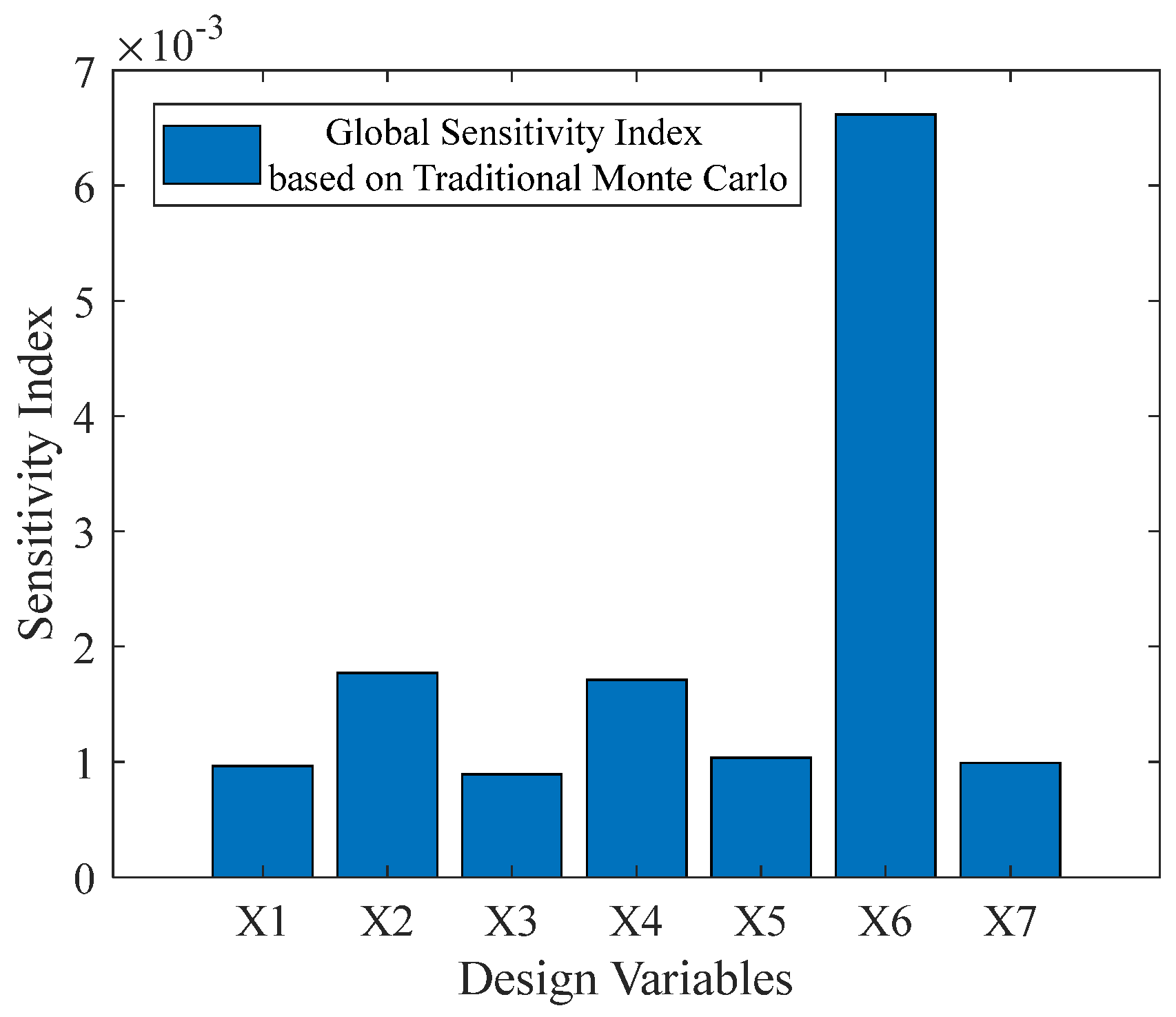
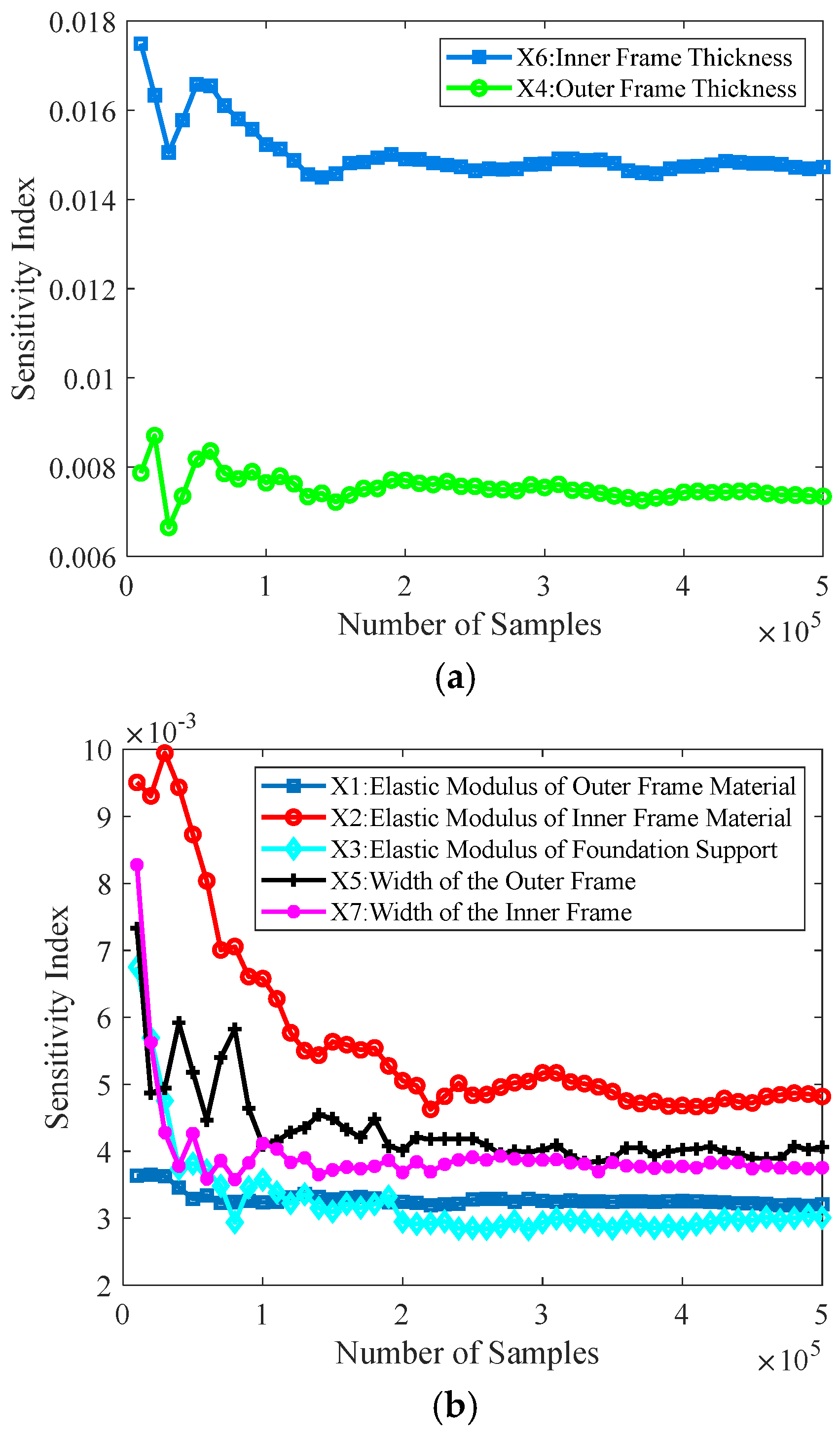
Sensitivity analysis is a widely used uncertainty analysis method that explores the contribution of input variable uncertainty to output response uncertainty and ranks the importance of input variables. Sensitivity analysis includes local sensitivity analysis (LSA) and global sensitivity analysis (GSA). Local sensitivity is limited by the selection of nominal points and cannot directly reflect the contribution of the interaction between a single input variable and multiple input variables to the statistical characteristics of output performance, lacking global and computational stability. Global sensitivity analysis, also known as importance measure analysis, aims to study the impact of input basic variables on output performance uncertainty in structural systems and rank the importance of input variables based on their degree of impact. Based on Bayes’ global sensitivity analysis, it is possible to evaluate the impact of all input variables and their interactions on the output results, not just local variations. This makes the analysis results more comprehensive and able to capture the complex nonlinear relationships and interaction effects in the system.
In light of this, this study develops a mechanical simulation model for a rotational modulation structure in a novel hybrid laser INS, isolating angular movements and simulating the major mechanical environments faced by high-dynamic aircraft. Key structural components are analyzed for mechanical performance under high overloads across different composite materials. Using MATLAB 2018b, an adaptive Kriging surrogate model is constructed, incorporating the unavoidable uncertainties in parameters such as geometry, measurement error, and material strength of components such as the base and frames. The model also considers structural deformation and failure in a half-sine shock environment (120 g, 11 ms), using deviations in the INS body coordinate system from the virtual coordinate system as the failure criterion. A reliability analysis model is established based on INS functional failure, applying Bayesian global sensitivity analysis to quantify the contribution of each input variable to failure probability. A dual-random uncertainty analysis model for frame component strength failure is also developed, accounting for dual-random uncertainties in parameter distributions for the outer frame structure. Using Sobol sequence sampling, the model simulates random phenomena to study the effect of changes in input mean values on structural strength failure probability. This analytical approach not only provides a reliability evaluation and design method for novel hybrid INS structures but also offers insights into how design parameter uncertainties affect INS navigation accuracy, thereby supporting advancements in inertial technology.
3. Reliability Analysis Model for the Hybrid INS Based on Kriging Surrogate Model
As critical components of an inertial navigation device, the base, platform, and inner and outer frames significantly impact the accuracy and stability of the INS system due to their static and dynamic properties. Under high-overload and large-shock mechanical conditions, elastic deformation in these structures can more easily cause the coordinate system of the inertial group body to deviate from the virtual body coordinate system. Based on the conclusions in
Table 3, the base, platform, inner frame, and outer frame all experience some degree of elastic deformation under shock conditions, where δ_Platform > δ_Inner Frame > δ_Outer Frame > δ_ Foundation. The stability of the inertial measurement system’s reference coordinate system is primarily affected by deformation, angle sensor accuracy, motor control precision, and gyroscope accuracy. However, improving the angle sensor accuracy, motor control precision, and gyroscope accuracy can be costly and challenging. Thus, as the inner and outer frames are the direct structural components connecting the platform assembly, shaft end assembly, and base assembly, increasing their structural stiffness and strength to reduce elastic deformation under overload conditions is the most direct method to minimize the deviation of the inertial measurement unit’s coordinate system from the true coordinate system.
When the inertial measurement unit body is mounted on the projectile without installation errors, the virtual body coordinate system of the inertial group is parallel to the projectile coordinate system. When the frame is in its initial strapdown lock state, the inertial group body coordinate system coincides with the virtual coordinate system, as shown in
Figure 9.
3.1. Kriging Surrogate Model
According to Kriging theory, the relationship between the output response
and input variable
can be represented as Equation (1):
where:
is the regression polynomial basis function vector;
is the vector of regression coefficients;
is a Gaussian random process with zero mean, and the covariance function is Equation (2):
where:
is the variance of the Gaussian process;
is the correlation function with parameter vector
, represented as Equation (3):
with
and
as the k-th elements of vectors
and
, respectively.
Given a training sample set of size
, the unbiased estimate of
and prediction error are defined as follows Equations (4) and (5):
where:
is the estimated value of ;
is the correlation function vector between the training sample points and the prediction point;
is the response of the training sample;
F is the regression matrix, Refer to Equations (6) and (7) for definition.
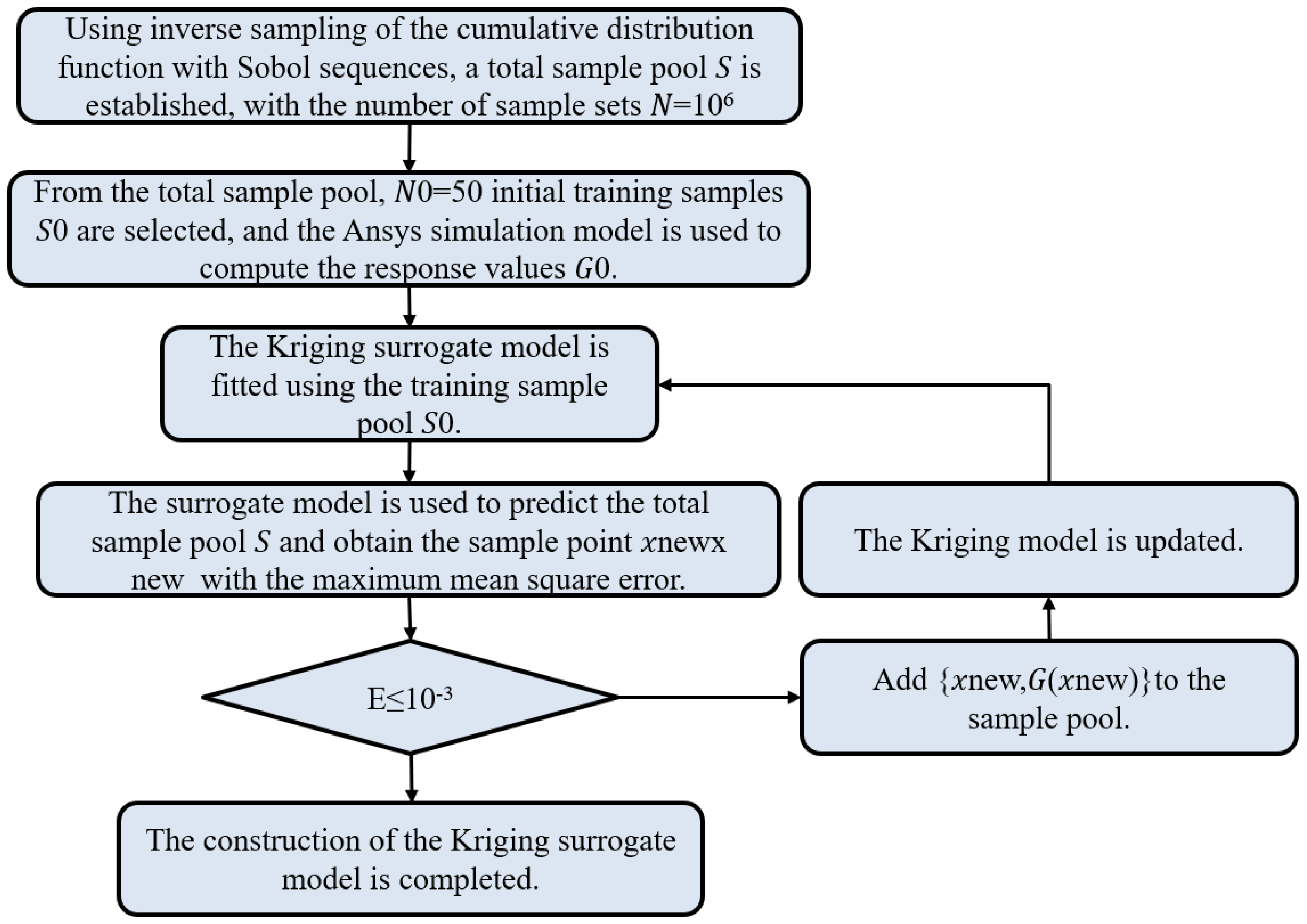
To improve the model’s prediction accuracy, this study uses the mean square error method to train the Kriging model by selecting points (Equation (8)) with the highest prediction error as new training points, updating the Kriging model:
where
is the standard deviation.
The convergence condition for building the Kriging model is determined as follows Equation (9):
where
,
is the maximum standard deviation before adding a point. The smaller the value of
, the more accurate the Kriging model prediction becomes.
Figure 10 shows the solution process of the Kriging surrogate model.
3.2. Representation of Random Uncertainty
According to the design requirements for the mixed inertial navigation system, the structural stiffness of the base, platform, and internal and external frames must be increased to reduce the deviation of the platform coordinate system from the true inertial coordinate system due to elastic deformation under overload conditions such as impacts and vibrations. The internal and external frames, serving as the direct structural components connecting the platform and the shaft-end assembly as well as the base assembly, have high requirements for part stiffness, strength, dimensions, and tolerances. However, significant uncertainties exist in the design and manufacturing processes of these parts. This uncertainty mainly arises from manufacturing process errors related to the material property parameters selected for the components. Taking aluminum alloy as an example, its forming performance is related to the alloy composition ratio, which can result in significant strength variations among different series of aluminum alloys. Additionally, during the structural processing of the components, factors such as manufacturing environment, technical conditions, and installation errors lead to uncertainties in geometric dimensions.
This paper selects key dimensional parameters and material performance parameters during the part design process as the subjects of study. Combining engineering experience with existing data, it is known that the elastic moduli of the materials for the outer frame
, inner frame
, and foundation support
, as well as the thicknesses
,
,
, and
of the outer and inner frames, follow a normal distribution. The specific distribution information is presented in
Table 4. At the same time, since the outer frame assembly is a critical load-bearing component connecting the base and the platform, this paper emphasizes selecting key parameters from the outer frame design process and interface dimensions with the shaft-end and platform components. These parameters include the roundness
of the outer frame, thickness
of the outer frame, width
of the outer frame, mounting interface
of the platform, motor mounting interface 1
, and motor mounting interface 2
, as illustrated in
Figure 11. The specific distribution information for these parameters is presented in
Table 5.
3.3. Reliability Analysis Model for Mixed Inertial Navigation Based on Failure
In reliability theory, the performance function is a function of basic random variables. Let
be the performance function of the mixed inertial navigation structure, where
represents an
m-dimensional random variable with a joint probability density function
. The failure domain is defined as Equation (10):
The indicator function (Equation (11)) for the failure domain is
:
Thus, the failure probability can be expressed as Equation (12):
Using the Monte Carlo method in reliability theory, the failure probability of the mixed inertial navigation system can be computed using the mathematical expectation of the failure domain indicator function (13):
where
is the total number of samples, and
is the number of samples falling into the failure domain.
This paper establishes a reliability analysis model for the mixed inertial navigation system based on failure probability, focusing on the following two aspects:
3.3.1. Considering the Failure Criterion for the Navigation Function of the Mixed Inertial Navigation System Under Overload Conditions
As shown in
Figure 9, when the coordinate system of the inertial navigation system (
) deviates from the virtual body coordinate system (
) beyond a certain range during impact overload conditions, it is determined that the navigation function of the mixed inertial navigation system has failed. By examining the
X,
Y, and
Z axes of the mixed inertial navigation system, the degree of deviation of the coordinate systems due to elastic displacements under large overload impacts is studied. Failure functions for each of the three axes are established. According to the requirements of a certain new type of mixed laser inertial navigation system and performance enhancement task specification, the allowable fluctuation errors
,
, and
in the
X,
Y, and
Z axes due to elastic displacement are set, as detailed in
Table 6. Among them, it is required that the maximum installation error of instruments in three directions installed in a mechanical environment should not exceed 8 inches, the safety factor of the outer frame in a mechanical environment should not be less than 2.0 (safety factor = ultimate stress/allowable stress), the deformation displacement should not exceed 0.052 mm, and the weight should not exceed 0.8 Kg. To ensure the normal operation of the mixed inertial navigation system, it is crucial that the fluctuation range of the three coordinate axes of the inertial navigation system under impact overload conditions meets the requirements for stable navigation functionality. The failure function
of the mixed inertial navigation system is thus established, as detailed in Equations (14)–(16), with the corresponding functions being
, where
.
The function corresponding to the failure of the
X-axis inertial navigation function is Equation (14):
The function corresponding to the failure of the
Y-axis inertial navigation function is Equation (15):
The function corresponding to the failure of the
Z-axis inertial navigation function is Equation (16):
3.3.2. Consideration of Structural Strength Failure Criteria as the Failure Criterion for the Outer Frame Assembly Under Overload Conditions
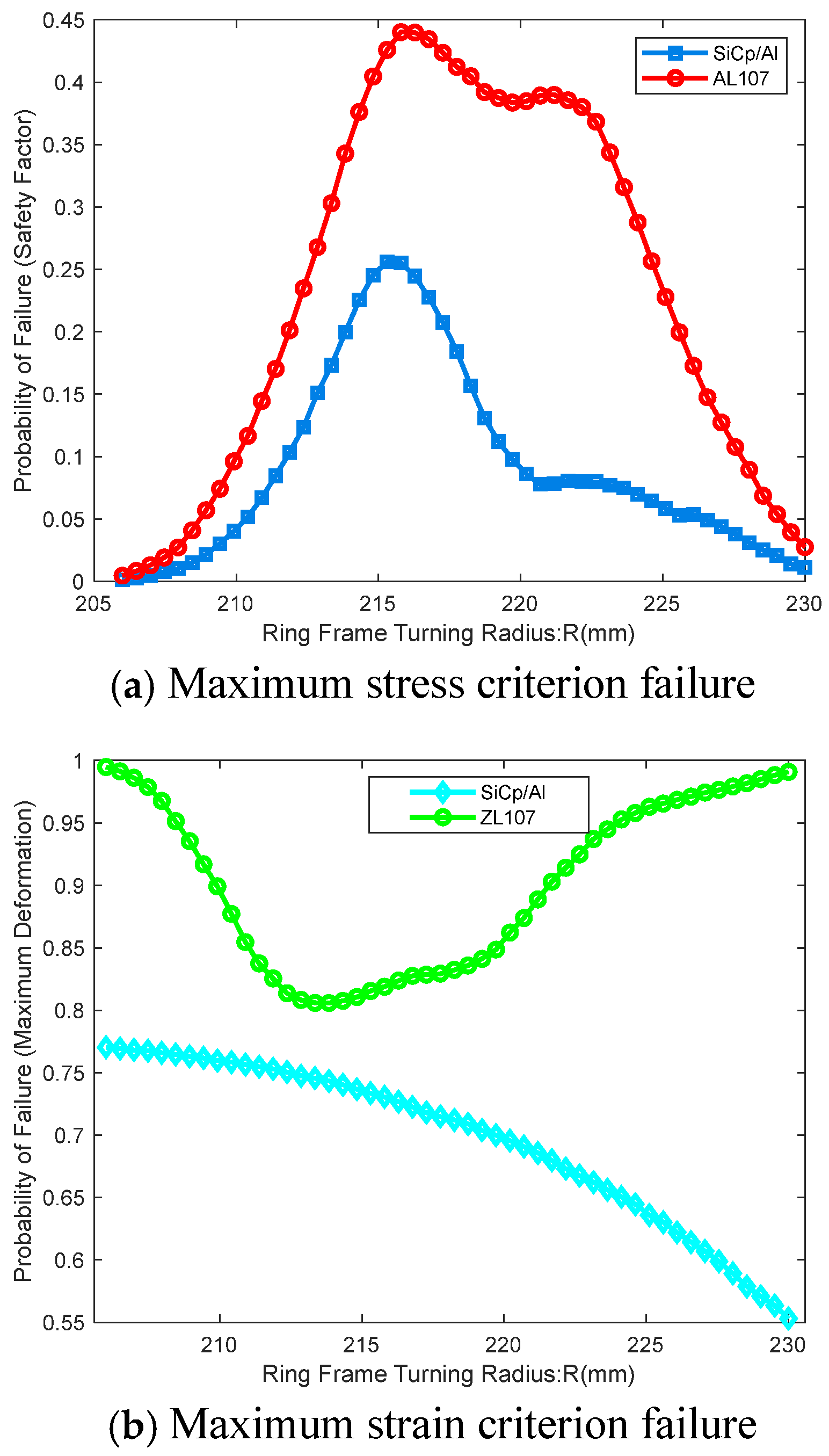
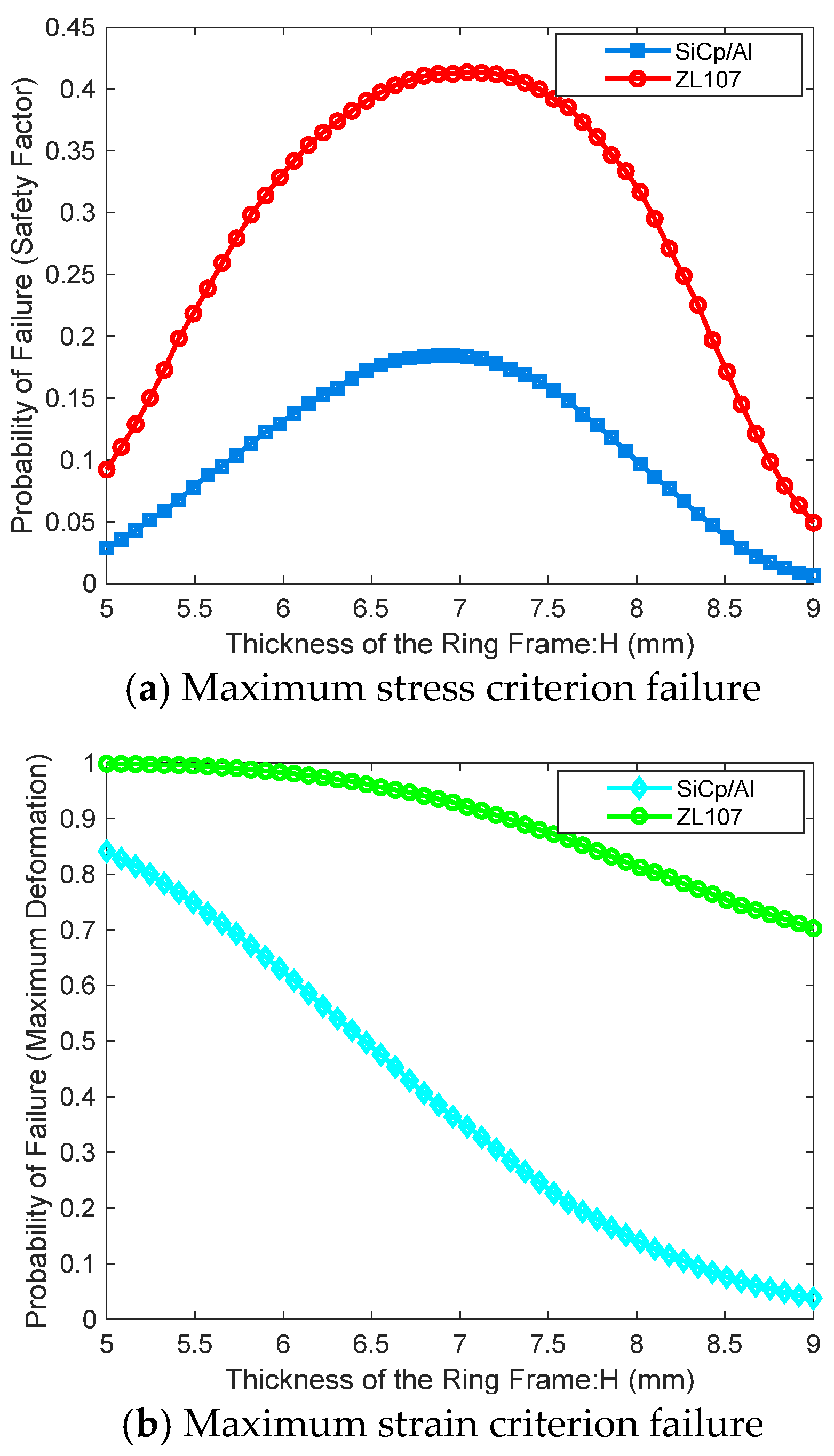
This paper considers the strength failure criterion as the failure criterion for the outer frame assembly structure under overload conditions, utilizing both the maximum stress criterion and the maximum strain criterion to determine whether the outer frame structure has failed. The maximum stress criterion states that material failure occurs when the maximum stress under the applied load reaches the material’s strength limit. The maximum strain criterion indicates that material failure occurs when the maximum strain under the applied load reaches the material’s strength limit.
In this paper, the maximum stress criterion is defined using the ratio of maximum stress to allowable stress as the safety factor (Failure Indicator 1). The maximum strain criterion uses the maximum strain of the structure under overload as Failure Indicator 2. Additionally, with the development and design of inertial measurement devices trending towards lightweight and miniaturization, mass is selected as a critical metric (Failure Indicator 3). The corresponding performance functions are denoted as , where .
The function corresponding to failure under the maximum stress criterion is Equation (17):
The function corresponding to failure under the maximum strain criterion is Equation (18):
The function corresponding to mass failure is Equation (19):
Addressing the uncertainty in the parameters of the outer frame structure, this paper first separately considers the two failure modes: failure under the maximum stress criterion and failure under the maximum strain criterion. A comparative analysis of the performance of the outer frame structure using aluminum alloy and SiCp/Al composite materials is conducted, with the outer frame roundness
, thickness
, width
, platform mounting interface
, motor mounting interface 1
, and motor mounting interface 2
as inputs. As shown in
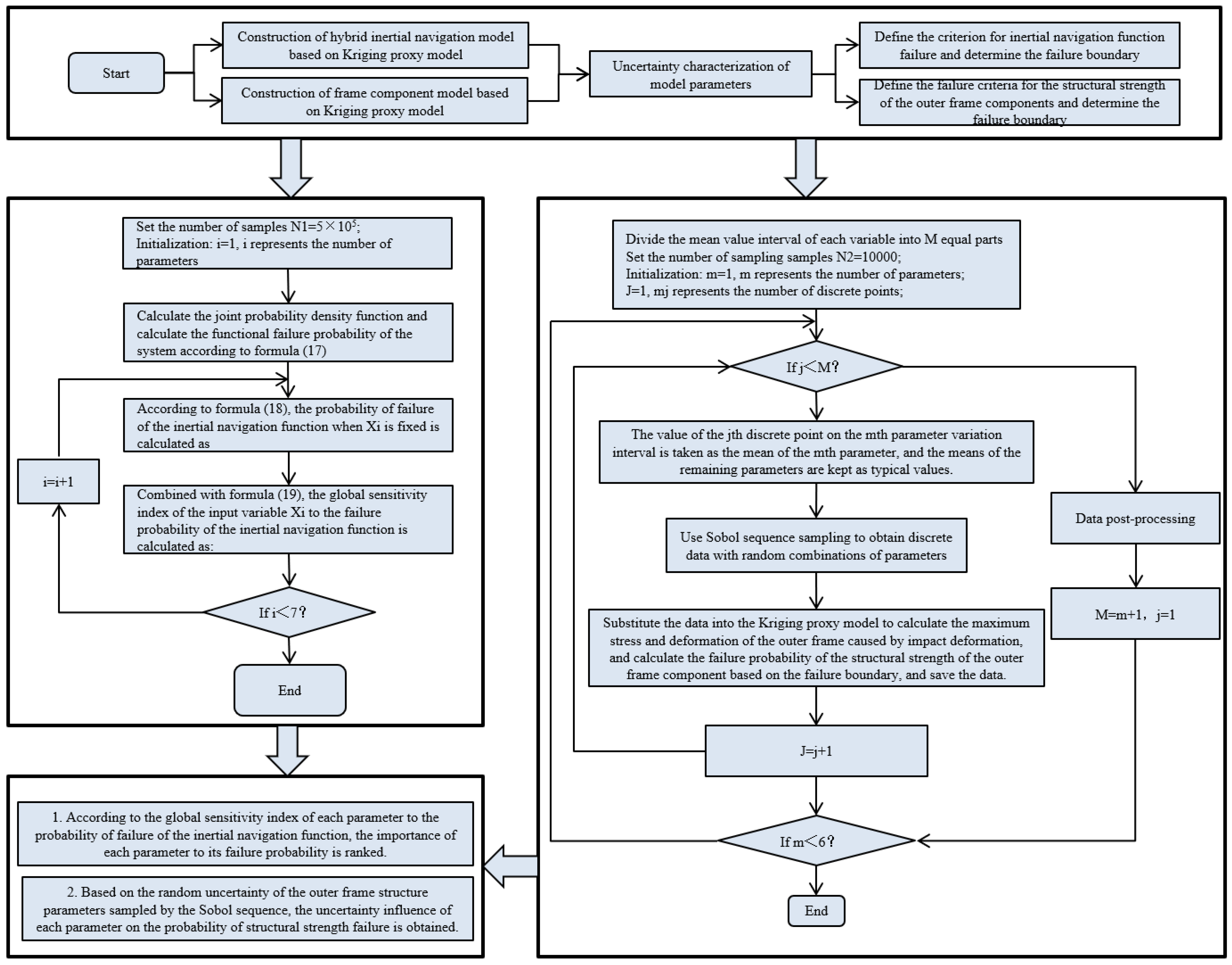
Figure 3, the outputs are the safety factor corresponding to the maximum stress and the maximum strain under mechanical overload conditions. A Kriging surrogate model is established to accurately predict these output indicators. Based on the Kriging surrogate model, the Sobol sequence sampling method is employed to simulate the random uncertainties of each design parameter and study their impact on failure probability under different failure modes.
Moreover, to comprehensively assess the performance of aluminum alloy and SiCp/Al materials, it is important to note that the occurrence of any one failure mode signifies the failure of the outer frame structure. Therefore, the three failure modes are treated as a series relationship, and the overall performance function can be expressed as Equation (20):
If
, the mixed inertial navigation system experiences functional failure. The failure domain
for the mixed inertial navigation function can be expressed as Equation (21):
The probability of failure
representing the system output response falling within the failure probability (i.e., the failure domain
) is provided by Equation (22):


 ,
, 





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}