1. Introduction
The traditional image semantic segmentation model needs a large number of samples with pixel-level annotation to train the model to obtain sufficient segmentation accuracy. However, due to the large labor cost of pixel-level annotation, the required samples are insufficient, which limits the scalability of image semantic segmentation. With the significant achievements in few-shot image classification, few-shot learning is gradually applied to semantic segmentation [
1,
2,
3]. Few-shot learning uses a small amount of training data, and eliminates the need for labeling a large set of training images.
The fundamental idea of few-shot is how to effectively use the information provided by the labeled samples (called support) to segment the test (referred to as the query) image. The existing few-shot image segmentation methods usually adopt a double-branch structure—a support branch and a query branch—in which the support branch is used to realize the extraction of segmentation priors, and the query branch is used to complete the propagation of segmentation priors and obtain the segmentation results of query images. Early works used pretrained encoders as feature extractors, first obtaining the features of the support image and the query image, then extracting the semantic prototype from the features of the support images. Finally, pixels in the query feature map were matched by the support prototypes to obtain the segmentation results. However, the number of support prototypes was typically much less than the number of pixels in a query feature map, and there was information loss in extracting prototypes, which led to the limitation of segmentation performance. In order to solve these problems, Wang et al. [
4] used the query image to reverse segment the support image with its prediction results to improve the semantic consistency of the prototype in the deep space. Liu and Qin [
5] used the most significant category information in the query image to optimize the coarse initial prototype, improving the category perception ability of the prototype. MMFormer [
6] used a class-agnostic segmenter to decompose the query image into multiple segment proposals, then merged the related segment proposals into the final mask guided by the support images. AAFormer [
7] designed masked cross-attention to support pixel extraction of proxy tokens for foreground areas. Segmenter [
8] captured the global image context and mapped it to pixel-level annotations by training learnable class embeddings. Inspired by Segmenter and AAFormer, we propose a prototype extractor, and consider directly training a learnable embedding to continuously acquire prototype features of specific regions in the image through cross-attention.
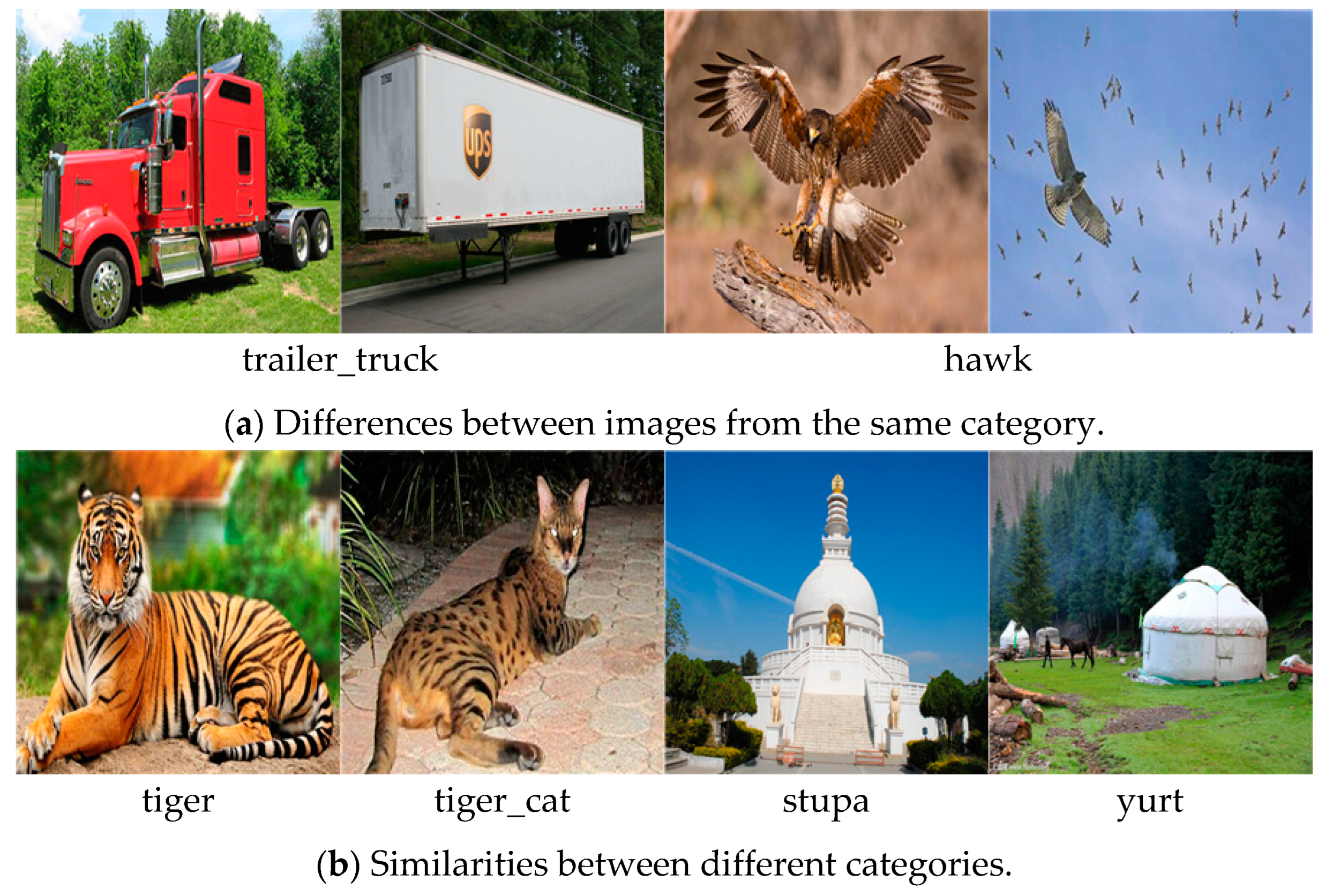
The differences between images from the same category and the similarities between different categories are the key obstacles to few-shot semantic segmentation, as shown in
Figure 1. In order to solve the problem of differences between images from the same category, we generalize the proposed prototype extractor to a k-shot scene, which simultaneously obtains the prototype features of different images in the same category, and learns common features from them for containing more discriminative information. For the research to solve the similarities between different categories, most of the current methods use contrastive learning, which enhances the consistency and compactness of features through pixel-level contrastive learning. However, the comparison between pixels brings a huge amount of computation, and most of these methods rely on a large feature space, which requires prior information from the training samples to obtain better performance, and it is difficult to generalize to new classes that the model has not seen. Inspired by the idea of generative adversarial networks (GANs) [
9], we believe that classes that have similarities to the target class can be regarded as fake samples generated by the generator, and we only need to implement the function of the discriminator to enable the model to distinguish between real/fake samples. In this paper, we propose an adversarial prototype generator, which refers to the support images as positive examples, and introduces different categories with similarities as negative examples. The module obtains the respective prototype features from the feature maps of positive and negative examples, and conducts a confrontation between positive and negative prototypes to make the final generated adversarial prototype focus on the positive features but not the negative examples, and obtains the feature differences between the positive and negative examples from the perspective of the prototype features. Inspired by SAM [
10], we design a corresponding decoder, use cross-attention between feature prototypes and query image embedding, guide the segmentation of the query image through the interaction between them, and obtain more accurate segmentation results under the guidance of the adversarial prototype.
In addition, we note that, in most of the methods, the encoders used are complex and pretrained, and we assume that the encoder can capture features of any class. But, in fact, in the supervised learning settings, the pretrained encoder will focus more on the training class, will be less effective at extracting features from unknown classes, and may lead to overfitting. One solution to this problem is to make the model not memorize the semantic information learned during training, which is difficult to achieve with pretrained encoders. In our work, we reduce the emphasis on the feature extraction capabilities of the encoder, we make simple modifications to the encoder of Vision Transformer (ViT) [
11], we remove some learnable parameters to reduce the encoder’s attention to the image content, and we make the model have better generalization performance for the new classes that are not trained.
Our main contributions are as follows:
- (1)
We propose a novel few-shot semantic segmentation model. Specifically, we design a prototype extractor to obtain class-related prototype features, introduce positive and negative examples, design an adversarial prototype generator to learn the feature differences between positive and negative examples, and design a corresponding decoder to segment the query image under the guidance of prototype features.
- (2)
We reduce the focus on feature extraction effects and make simple modifications to the encoder so that the model has better generalization performance for new classes.
- (3)
A large number of experiments on the FSS-1000 dataset show that the proposed model has strong generalization ability for new classes, and the segmentation effect is not inferior to the FSS methods with the encoder.
3. GFormer
3.1. Overview
Problem Definition. Widely used episodic meta-training [
22] is adopted in few-shot segmentation. Specifically, we denote the training set as
and testing set as
, the categories of the two sets
and
are disjointed (
). During training, we randomly select a set of sets from the training set; each set of images has the same category and is divided into a support set
and a query set
, where
represents the number of support set images, and
and
are the images and their corresponding ground-truth binary mask. For each target category, we select an additional category from the training set that is similar to the target category, which is called the interference category. We name
from the target category as the positive support set
, and
from the interference category as the negative support set
. During testing, we perform the same for the test set. Note that both support masks
and query masks
are available for training, and only support mask
is accessible during testing.
Model Architecture. As shown in
Figure 2, the GFormer proposed in this paper has four components: encoder, prototype extractor, adversarial prototype generator, and decoder. Each module and training strategy will be described in detail next.
3.2. Encoder
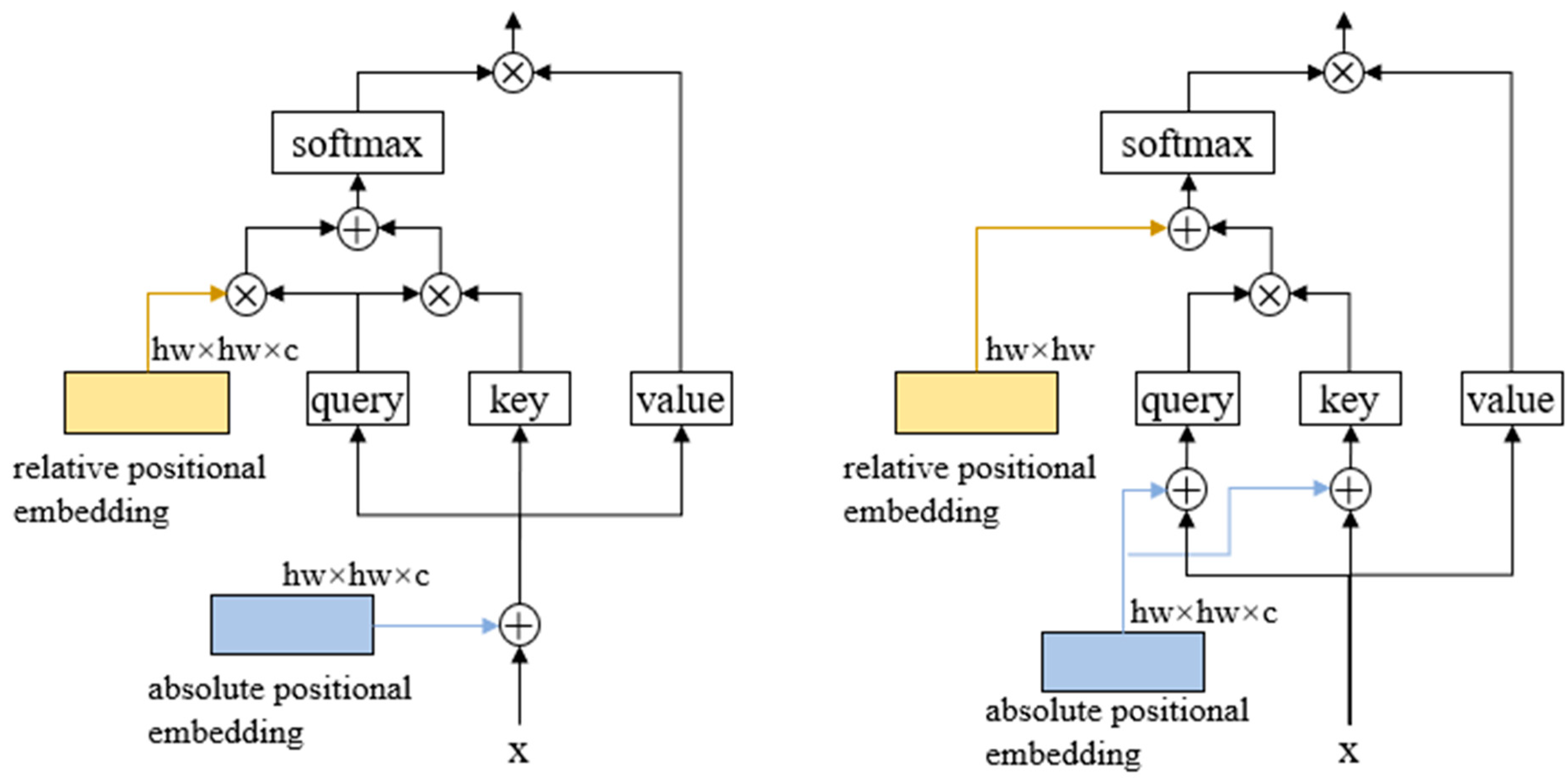
Our encoders are built like VIT encoders, but there are two differences, as shown in
Figure 3. (1) We do not use learnable positional embedding, rather we use sinusoidal positional embedding [
23]. Compared with learnable positional embedding, sinusoidal positional coding does not need to be learned, which is suitable for the characteristics of small training data in few-shot semantic segmentation. Note that our position embedding is not directly added to the image embedding but is added to the query and key during the self-attention process, because the support image and the query image will go through the same encoder. If the position embedding is directly added, then the prototype feature will have position information in the process of prototype extraction, which will produce wrong guidance for the final segmentation. (2) At present, the mainstream relative position embedding adopts the contextual product method [
24]. This kind of learnable relative position embedding is difficult to achieve the desired effect when the training sample is small. We propose a non-parameter relative position embedding
, which is directly obtained according to the relative distance of image patches, calculated as:
where
is the relative distance of image patches,
is the relative distance between patch
to image, and
is the scale factor.
The scale factor is used to control how much attention is paid to the surrounding patches.
3.3. Prototype Extractor
The module employs cross-attention in the transformer. The module has an inner learnable token, and receives the image and its corresponding binary mask as input.
Each layer performs three steps: (1) cross-attention from tokens (as queries) to masked image embedding, (2) cross-attention from the full image embedding (as queries) to tokens, and (3) MLP updates each token. Step (1): Inspiration is taken from AAFormer [
7]. First, an attention weight matrix is calculated, and then the foreground part is preserved by masking. Formally:
Since there is no self-attention on the image, the module is able to ensure that only the information about the foreground of the image is obtained for each token update. The module uses the updated token as the prototype feature, denoted as . In addition, the attention matrix of step (1) and the updated image features of step (2) of each layer are retained for generating adversarial prototypes.
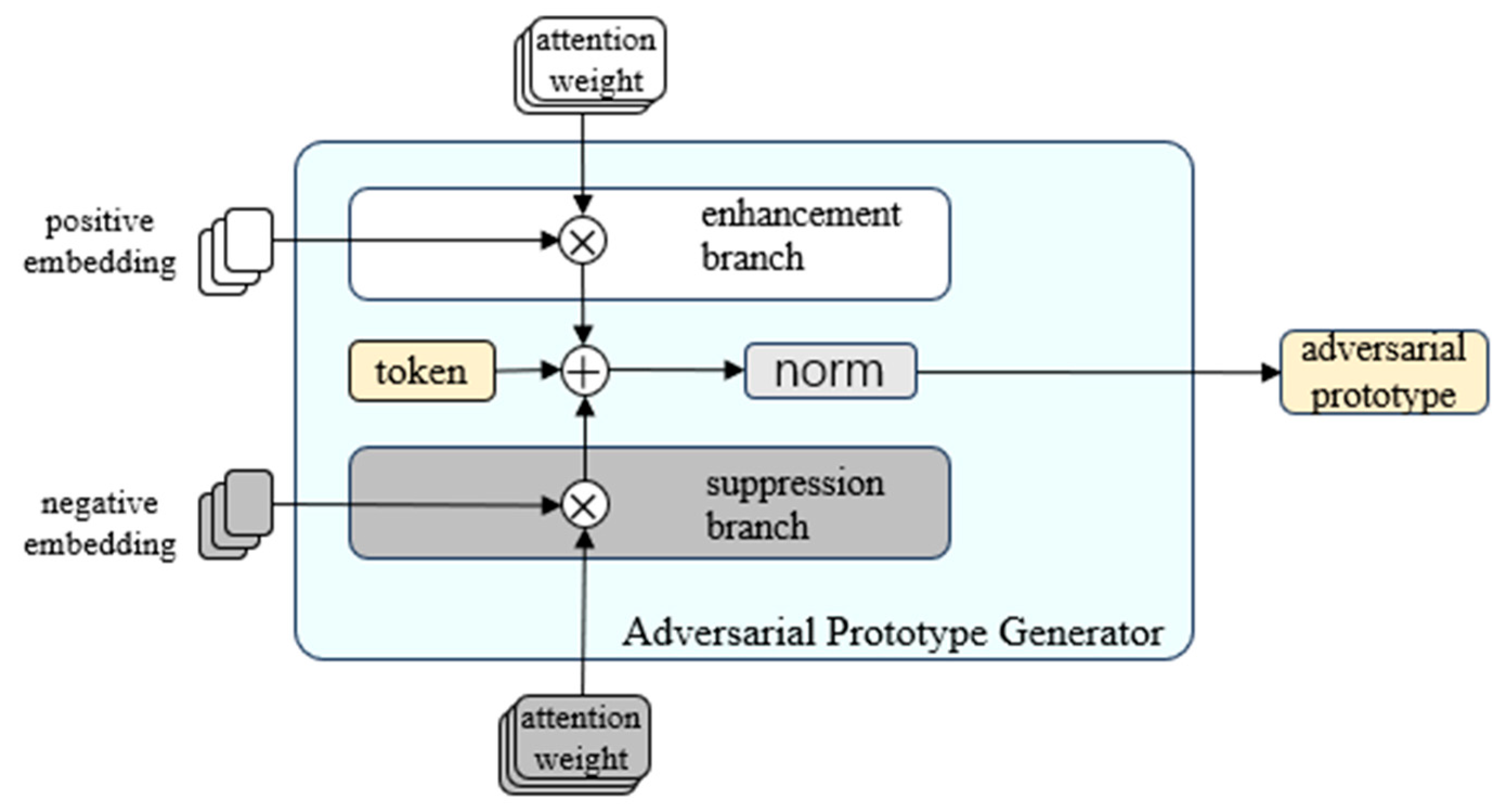
3.4. Adversarial Prototype Generator
The module design is shown in
Figure 4. The module has an inner learnable token. After the positive and negative images pass through the prototype extractor, the updated image features and attention matrices are used as inputs for the adversarial prototype generator. Each layer has two branches: the enhancement branch and the suppression branch, which receive the positive and negative data, respectively. Different from the traditional method, we directly use the attention matrix from the prototype extractor to replace the query–key calculation, take the updated image features from the prototype extractor as the value, add the respective calculation results to the learnable token at the same time, and finally update the token with MLP. We take the updated token of the last layer as the adversarial prototype. After training, the adversarial prototype generated by the module can enhance the attention of the positive features and suppress the attention of the negative features.
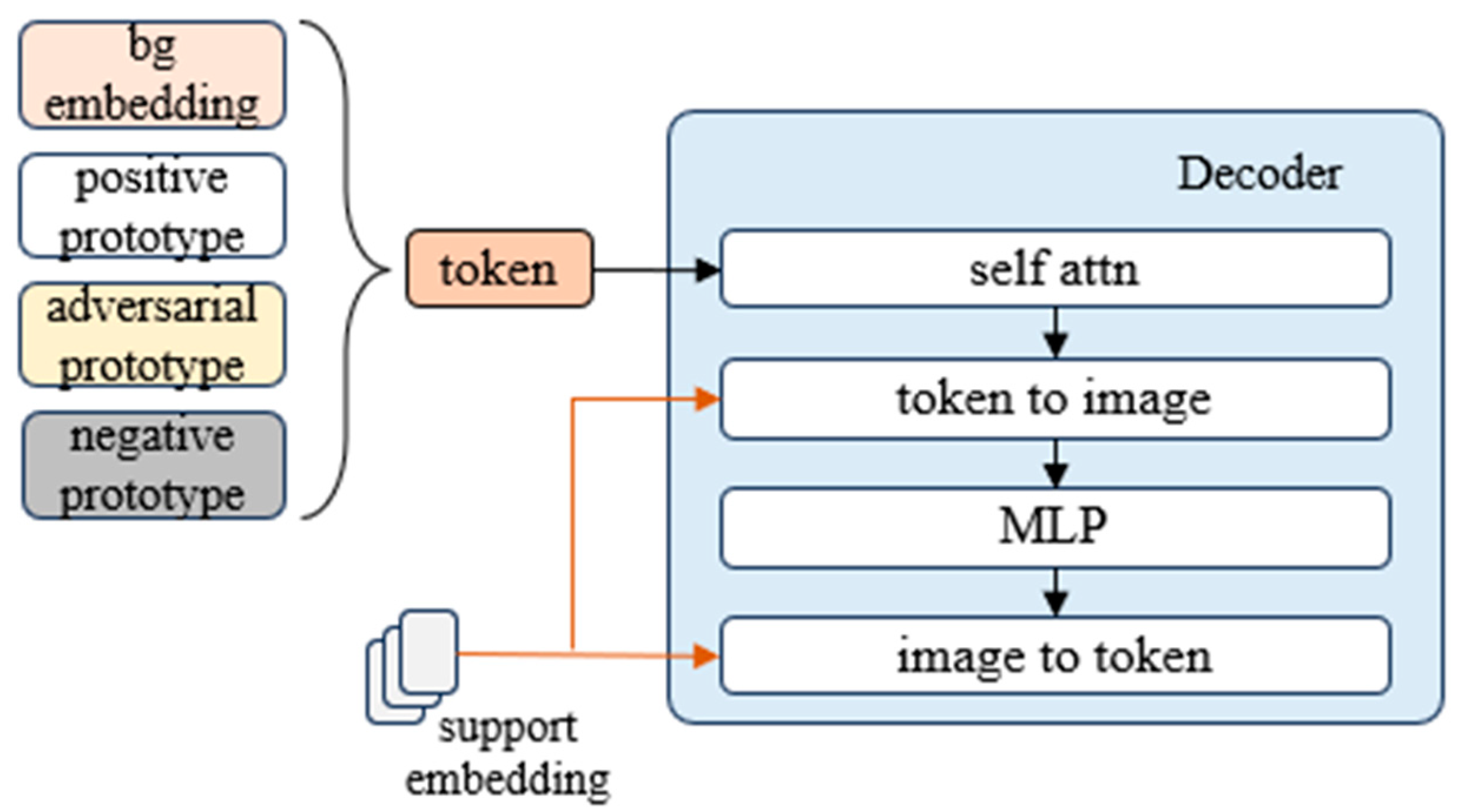
3.5. Decoder
For the decoder, we take inspiration from SAM’s decoder and imitate its operation. We introduce learnable background class embedding to distinguish possible background regions. We concatenate the background class embedding and the positive prototype, naming them ‘tokens’. If negative support images are entered, the negative prototype and adversarial prototype are additionally inserted into the tokens. The decoder design is shown in
Figure 5. Each decoder layer performs four steps: (1) self-attention on the tokens, (2) cross-attention from tokens (as queries) to the image embedding, (3) a point-wise MLP updates each token, and (4) cross-attention from the image embedding (as queries) to the tokens. After running the matcher, we follow the SAM [
10] operation, upsample the updated image embedding, then pass the class prototype to the MLP, and finally predict the mask with a spatially pointwise product between the upscaled image embedding and the MLP’s output.
3.6. Loss Function Definition
We calculate the losses for each module individually. We define
as the predicted mask and
as the ground truth. We supervise with focal loss. Formally:
where
is the type of prototype,
is image embeddings of image
,
is prototype.
Prototype Extractor. We use the same method as the prediction mask. We upsample the updated image embedding of the last layer of the module, pass the prototype to the MLP, and supervise the mask prediction for each image. The loss function can be formulated as:
where
.
Adversarial Prototype Generator. For the adversarial prototype generator, we have two views: the enhancement view and the suppression view. In the enhancement view, we input positive and negative examples into the enhancement branch and suppression branch, respectively. Since the positive and query images are from the same category, the adversarial prototype obtained from this view can enhance the target category in the query image. In the suppression view, we input positive and negative examples into opposite branches; the resulting adversarial archetype will suppress the target category and treat it as the background. We use the adversarial prototypes from two views to calculate the masks at the same time. We concatenate the two masks and calculate the loss:
where
is the enhancement view,
is the suppression view,
denotes the concatenate operation,
is the background, and
is the
th support image.
Decoder. The final mask calculates the loss in the same way as the adversarial prototype generator; except, the final mask, for each layer, calculates the mask with the updated image embedding and positive prototype. The loss function can be formulated as:
3.7. Training Strategy
Due to the dependency between the inputs of the proposed prototype extractor, adversarial prototype generator, and decoder, we train the three components to a steady state in order, otherwise the model will not converge. Notice that, for the prototype extractor, we do not want the module to know any information related to the image content; therefore, in order to make it strictly follow the area instructions provided by the mask, we add the background mask to its training process, so that the prototype extractor can extract the background prototype under the guidance of the background mask.
4. Experiments
4.1. Dataset and Evaluation Metric
We conduct experiments on two popular few-shot segmentation benchmarks, FSS-1000 [
25] and Pascal-
[
26]. FSS-1000 is a dataset dedicated to few-shot semantic segmentation that contains 1000 classes with 10 image–mask pairs for each class. Pascal-
, with extra mask annotations SBD consisting of 20 classes, is separated into 4 splits. For each split, 15 classes are used for training and 5 classes for testing. We adopt mean intersection-over-union (mIoU) as the evaluation metrics for the experiments.
4.2. Implementation Details
We take the first 900 classes of the dataset as the training set and the last 100 classes as the test set. For the prototype extractor and the adversarial prototype generator, we randomly select 300 classes from the training set for training, 400 in decoder, and re-extract after the training of each module to ensure that the classes used by the 3 modules are not exactly the same; in this way, we ensure that the model will not be biased towards the training class, and will have a strong generalization ability for the new class. The input image size is 224 × 224, and the patch size is set to 8 × 8. All modules use the SGD optimizer and the Poly scheduler, whose power is 0.95, and use a Poly learning rate warmup for 5 epochs. For the prototype extractor, we train 100 epochs with a batch size of 1 and an initial learning rate of 5 × 10−4. For the adversarial prototype generator, we train 100 epochs, and, for each iteration, the batch size varies with a range of 3–9, with a cycle every 10 iterations, and an initial learning rate of 3 × 10−4. For the decoder, we train 300 epochs with a batch size of 1 and an initial learning rate of 3 × 10−4. The learning rate of the model is derived after many experiments. When greater than the set value, the model may not converge. Our method is implemented by PyTorch (version 1.13.1), and the graphics card used is an Nvidia GeForce 3060 (production location: China). Due to the limitation of experimental conditions, the number of layers of each module is reduced from 12 to 6.
4.3. Visualizations
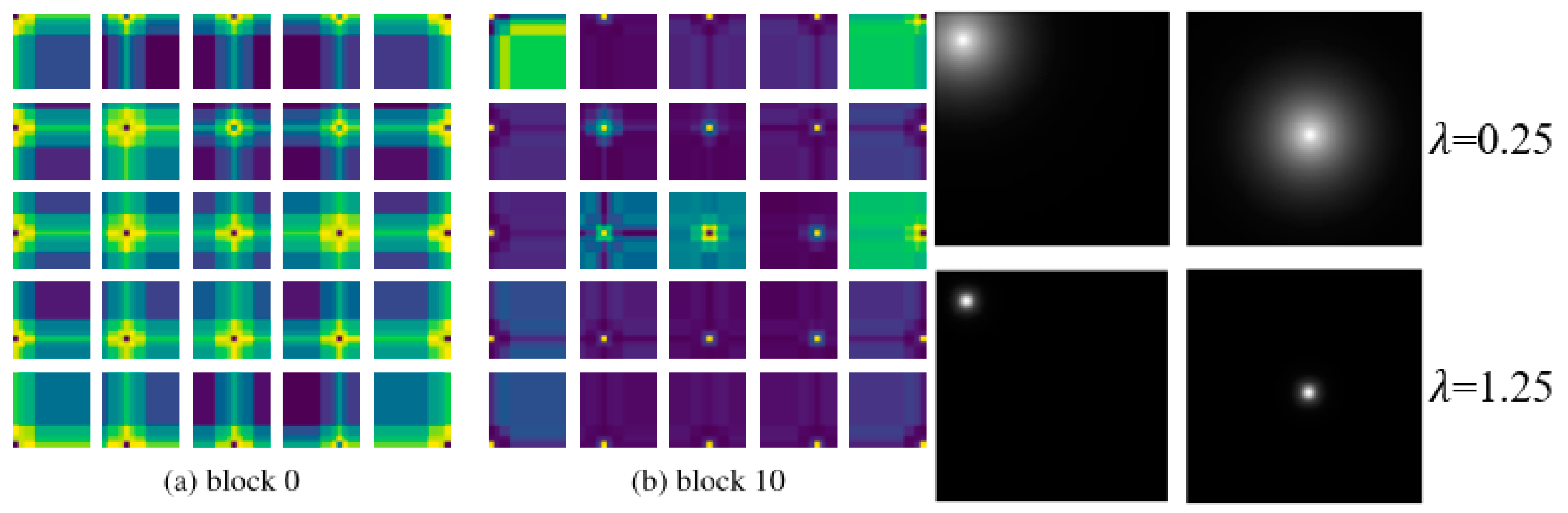
In
Figure 6, we compare the relative position coding effect of the proposed non-parameter relative position coding with the relative position coding in this paper by visualizing it, and the visualization diagram of the learnable coding is from the original image of this paper. The positional coding we propose implements a similar alternative to learnable positional encoding, where each patch focuses more on neighboring patches. The difference is that, as the number of layers increases, this phenomenon in this paper is attenuated by capturing enough local information, while the non-parameter positional encoding is constant, which may lead to reduced encoder performance. Although it is possible to achieve the same effect by adjusting the parameters, it is difficult, and our work is not focusing on this module.
In
Figure 7, we show the effect of the prototype extractor in the 1-shot and 5-shot scenes, respectively. They all belong to support images, and the token obtains the prototype features of the images under the guidance of the mask, and obtains the common prototype features of k support images at the same time in the k-shot scene.
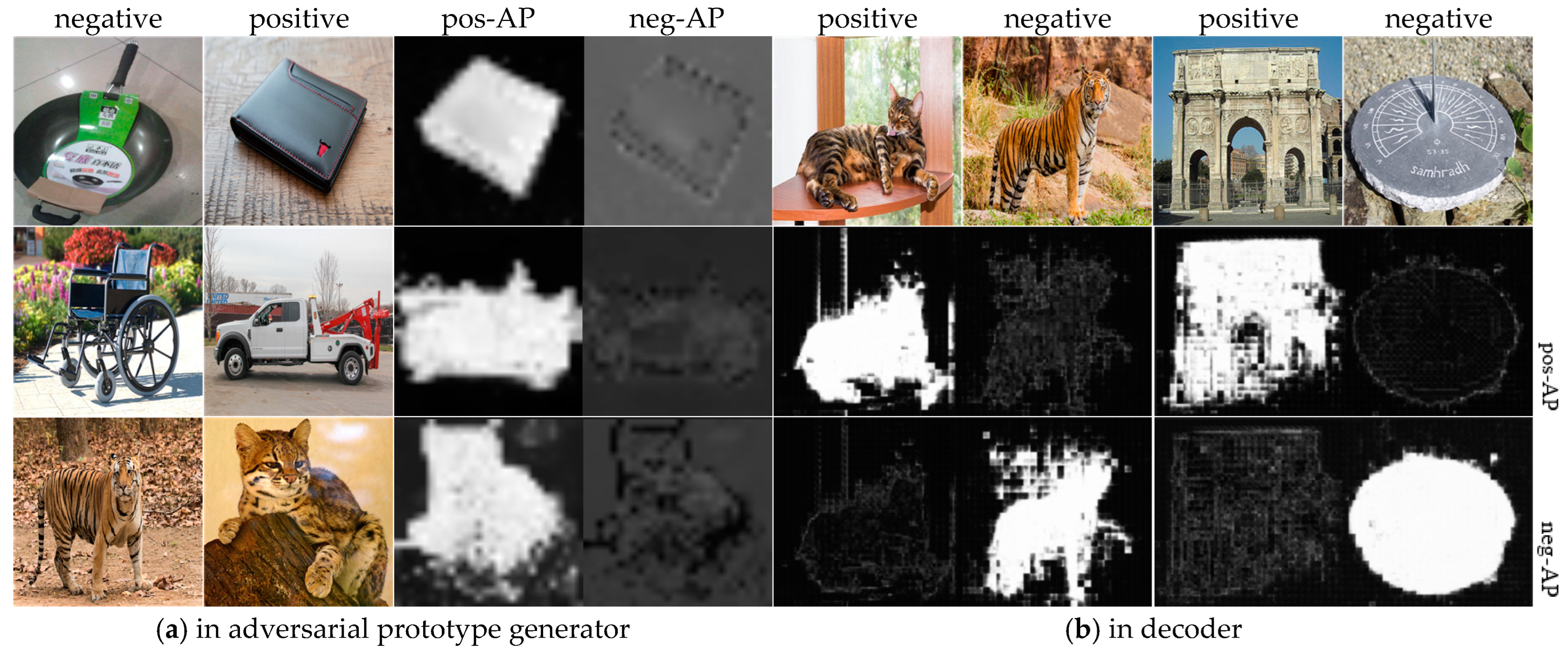
In
Figure 8a, we show the effects of the adversarial prototype generator. They all come from the support set, which means they do not go through the decoder. We put the positive example into the enhancement branch and the negative example into the suppression branch to obtain the positive adversarial prototype. We put the negative example into the enhancement branch and the positive example into the suppression branch to obtain the negative adversarial prototype. The positive adversarial archetype expands the distance between the foreground and the background to accurately find the pixels of the positive category, while the negative adversarial archetype suppresses the attention on the positive category and treats it as the background.
Then, we show the effect of the decoder in
Figure 8b. We stitch together the positive and negative query images, and use both the positive and negative adversarial prototypes to decode the stitched images. The results show that each adversarial prototype is able to find the category from the enhanced branch from the two images, and the category of the suppressed branch is regarded as the background. In
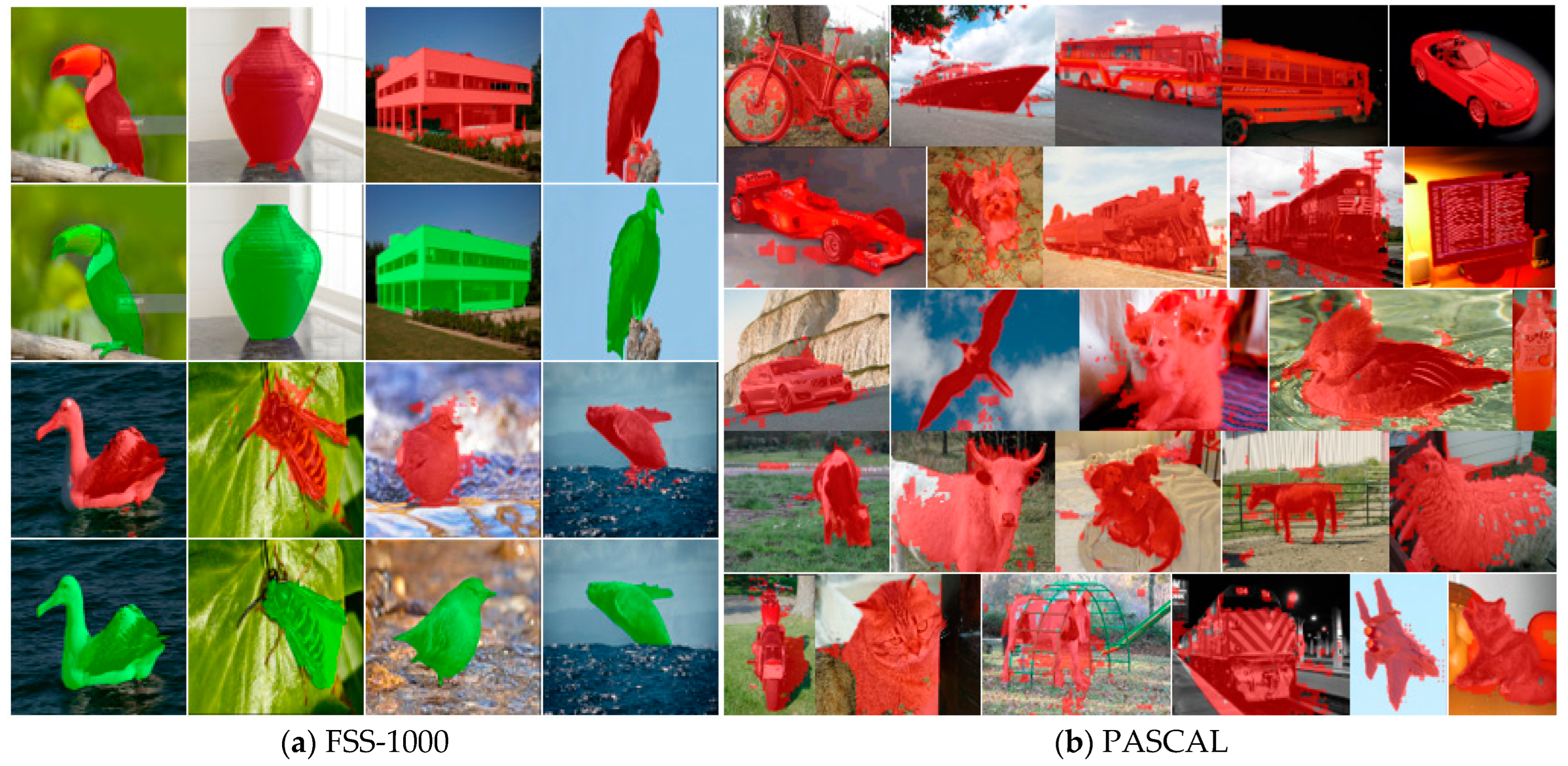
Figure 9a, we show the final prediction for some of the unseen classes from FSS-1000. The results show that our model can correctly find the corresponding categories in the support images.
4.4. Results
During the test, we found that the classes of some tiny objects could not be segmented correctly, especially the icon categories, and the prediction results were completely wrong. Therefore, we make the following analysis: for the icon categories in the image, they do not have much feature information in the channel dimension, and they can only be distinguished from the spatial dimension.
As can be seen in
Figure 10, the pixels in the corresponding region of the truth value of this category are the same, the prototype features extracted from these images do not contain discriminative feature information, and the difference between different images in the channel dimension is only the color difference. Therefore, this type of category can only be discerned in terms of spatial dimensions. Since the feature extraction in the spatial dimension is not carried out in this work, it is difficult to correctly segment this type of category.
In
Table 1, we present the experimental results of our method and other methods that test using FSS-1000.
According to the results, there is still a large gap between current performance and the method in FSS-1000. Since the focus of our work is on the generalization performance of the model rather than the accuracy of segmentation, we changed the learnable embedding in the original encoder to the non-parameter embedding. The reduction in segmentation accuracy brought by this operation was expected, which also indicates that our model has enormous potential for improvement.
For dataset FSS-1000, we used only 400 classes for training, while other papers used 760 classes. We did not use any data augmentation. In cases where the training data were significantly less than other works, we achieved similar segmentation performance. Therefore, our work has ‘strong’ generalization performance.
4.5. Result on Pascal-
We validated the generalization performance of the model on the Pascal-
dataset. In order to make the results more convincing, we did not do any training on the Pascal-
dataset but directly used the model trained on FSS-1000. In
Table 2, we present the experimental results of our method and other methods that tested in Pascal-
. We selected some images with large differences in shape and color from the Pascal-
dataset for cross-validation, and the segmentation results are shown in
Figure 9b. The results show that our model is able to extract prototypes from images with large intra-class differences, and can accurately identify the target class.
4.6. Ablation Study
In order to explore the impact of adversarial prototypes on model performance, we eliminated the adversarial prototype generator (APG) and retrained the model. In addition, we studied the effects of using only the positive adversarial prototype and using both positive and negative adversarial prototypes on segmentation performance. The results are shown in
Table 3.
The experimental results show that the mIoU value obtained by the model with the adversarial prototype generator is about 4% higher than that of the model without the adversarial prototype generator. The performance improvement of adding a negative adversarial prototype to guide segmentation is not significant, the value has only increased by 0.35%. We make the following analysis: the positive adversarial archetype can increase the attention of positive examples, while the negative adversarial archetype inhibits the attention of positive examples. In the attention layer of the decoder, there is a huge gap between the attention of the foreground pixels in the query image to the two adversarial archetypes, and the negative adversarial archetypes play a small role in the attention weight. Therefore, the negative adversarial archetype will not have much effect on the segmentation of the positive example.
We performed ablation experiments on the encoder modifications, and the results are shown in
Table 4.
The results show that the learnable position embedding will pay more attention to the training data, and the generalization performance of new classes will not be strong when the training data are less. The proposed encoder can effectively improve the generalization performance of new classes.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}