
Three-Dimensional Geological Modeling Method Based on Potential Vector Fields

Abstract
1. Introduction
2. Materials and Methods
2.1. Potential Vector Field Method
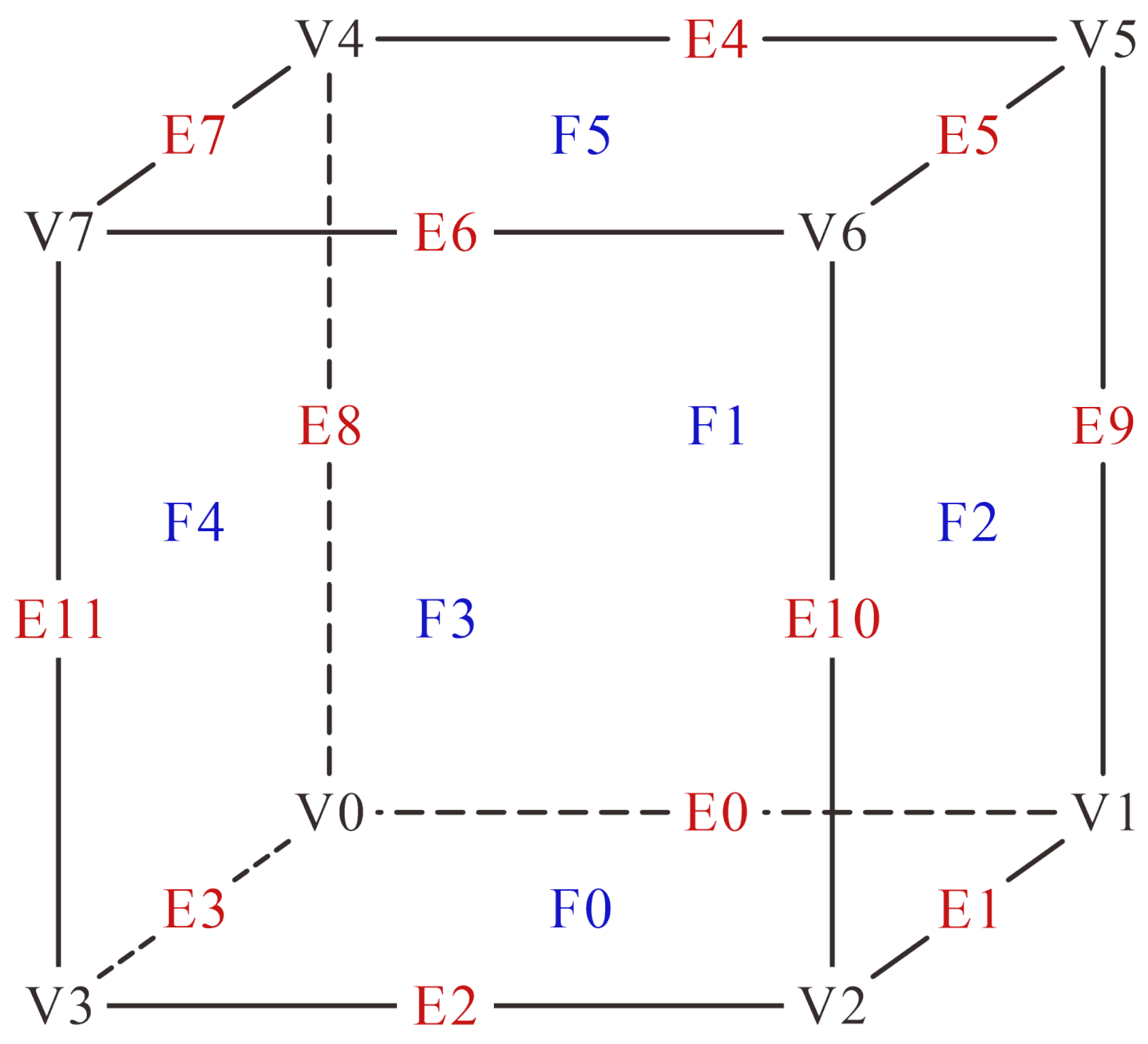
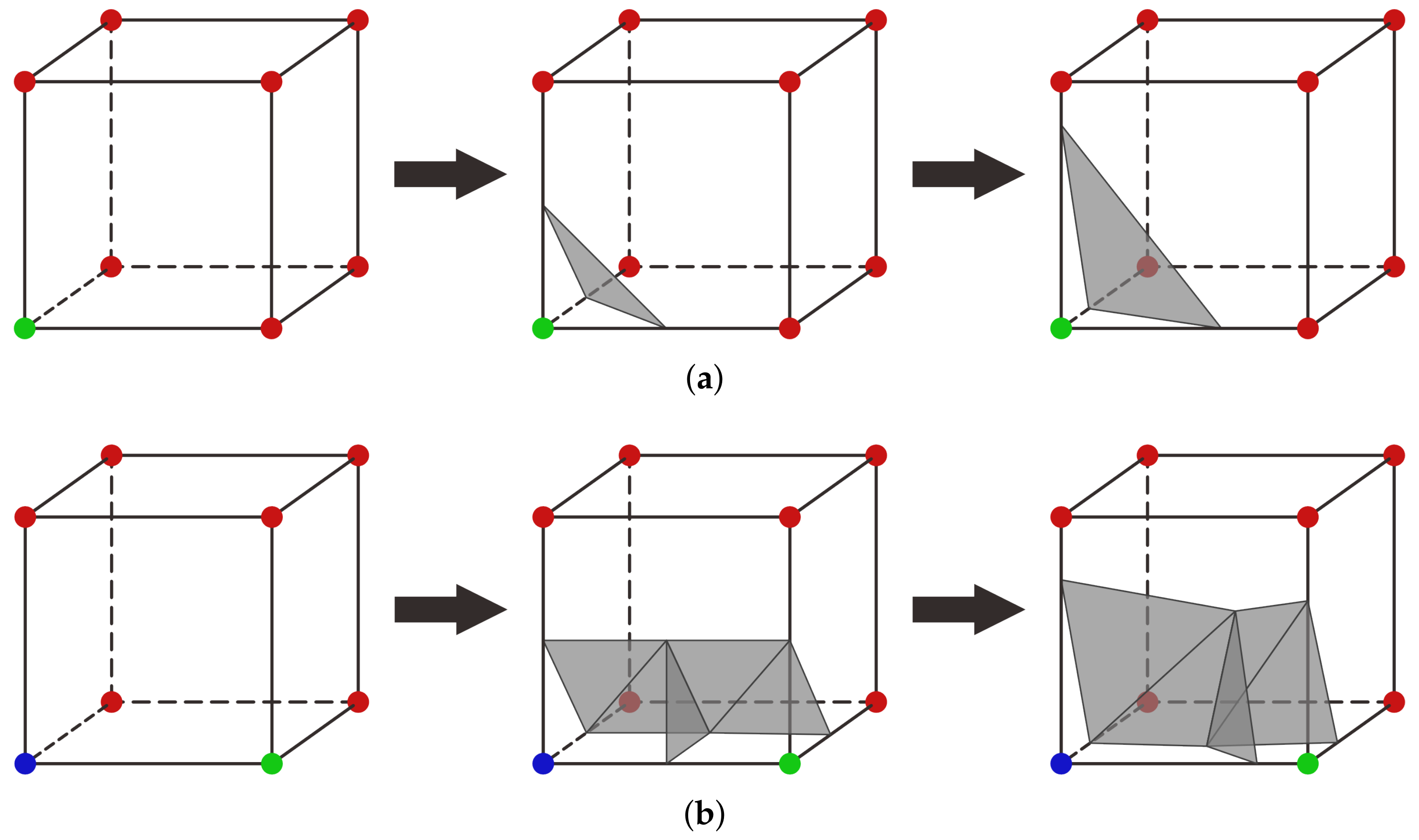
2.2. Generalized Marching Cubes Algorithm
- For the intersection points
- 2.
- For the intersection points
2.3. Modeling Process
- Data Point Acquisition from Borehole Data
- 2.
- Constructing a Potential Vector Field
- 3.
- Generating a Geological Surface Model
- 4.
- GPU Parallel Processing
3. Results
- CPU: Intel(R) Core(TM) i5-8300H CPU 2.30 GHz (Intel Corporation, Santa Clara, CA, USA); Procurement Source: Dell(China) Inc., Xiamen, China.
- GPU: NVIDIA GeForce GTX 1050 (2.0 GB) (NVIDIA Corporation, Santa Clara, CA, USA); Procurement Source: Dell(CHina) Inc., Xiamen, China.;
- Memory: 8.0 GB.
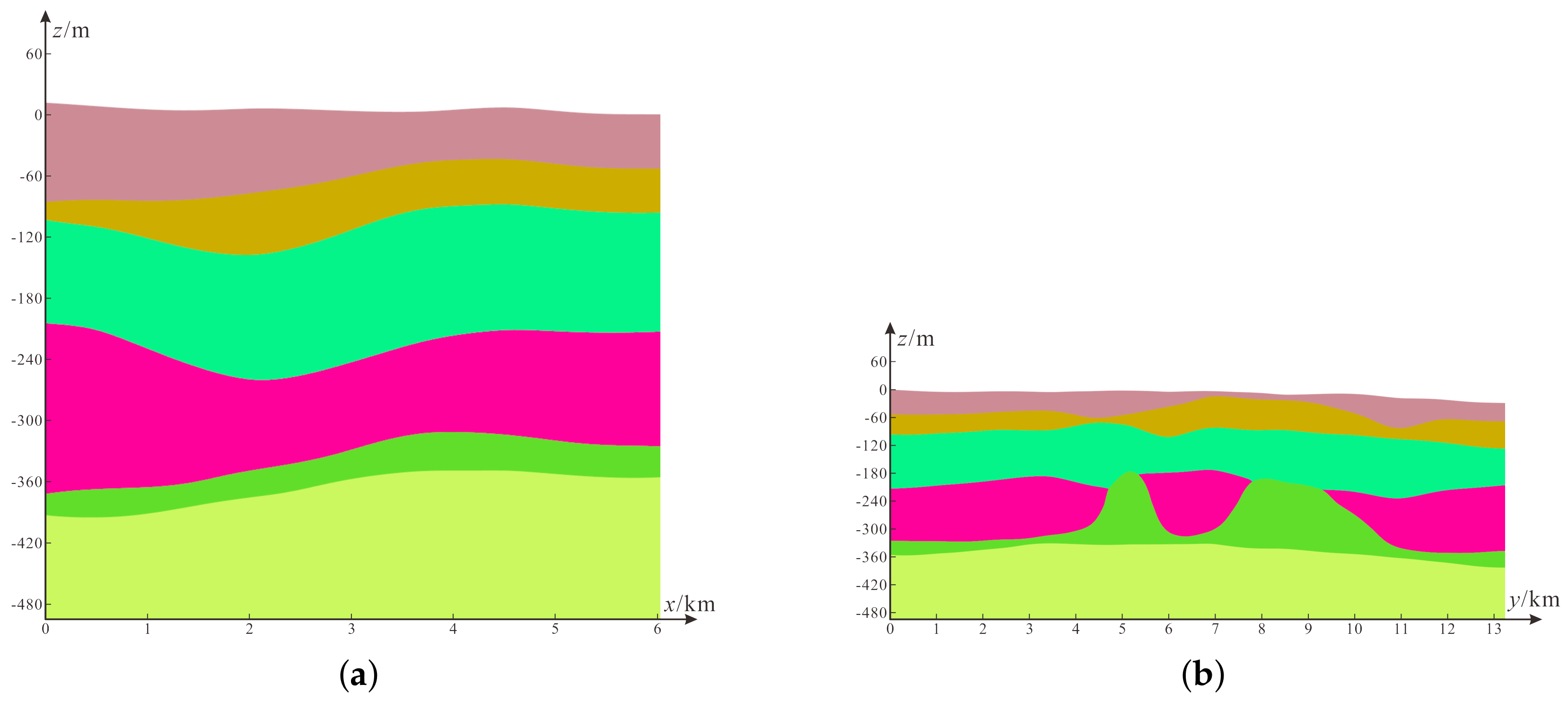
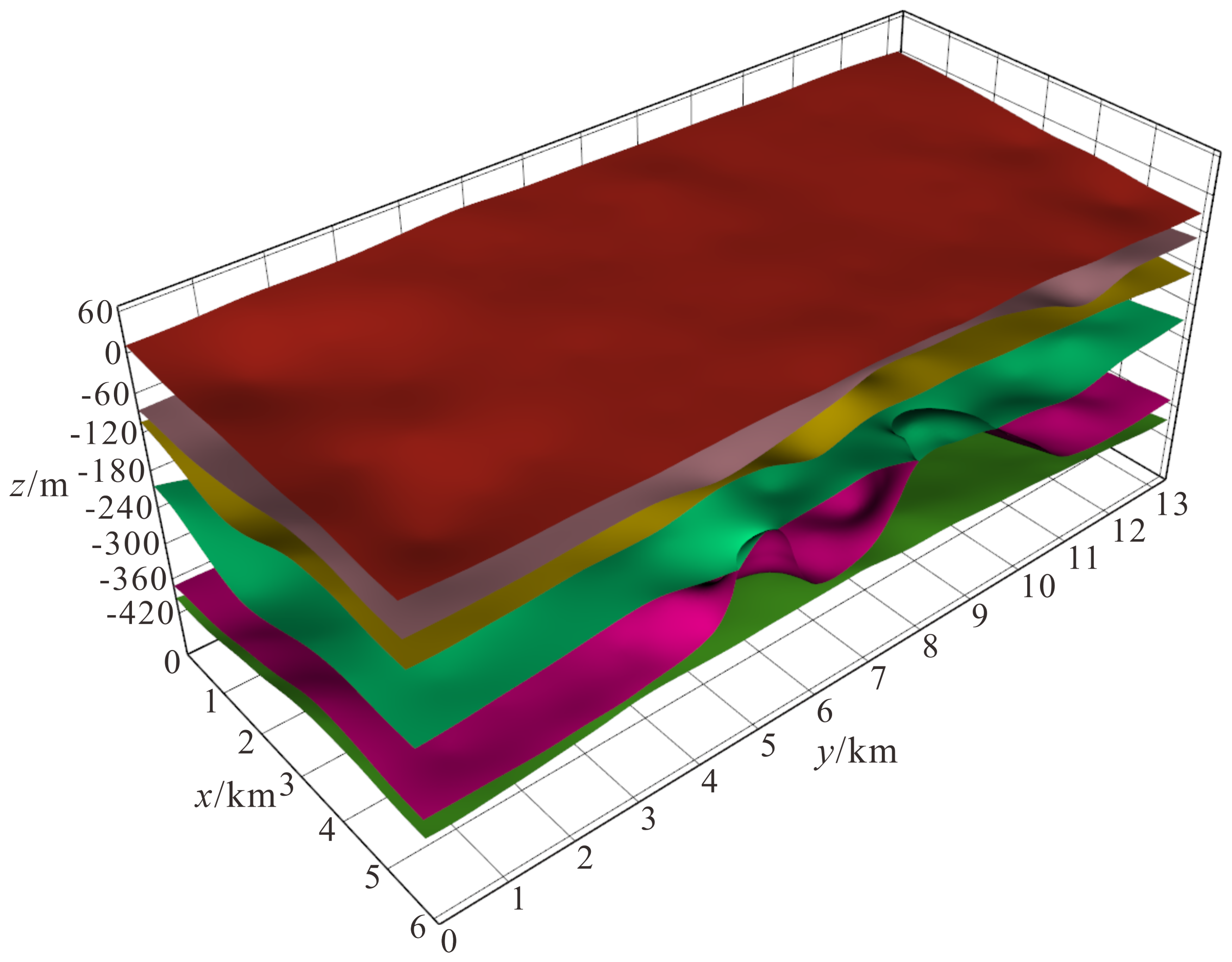
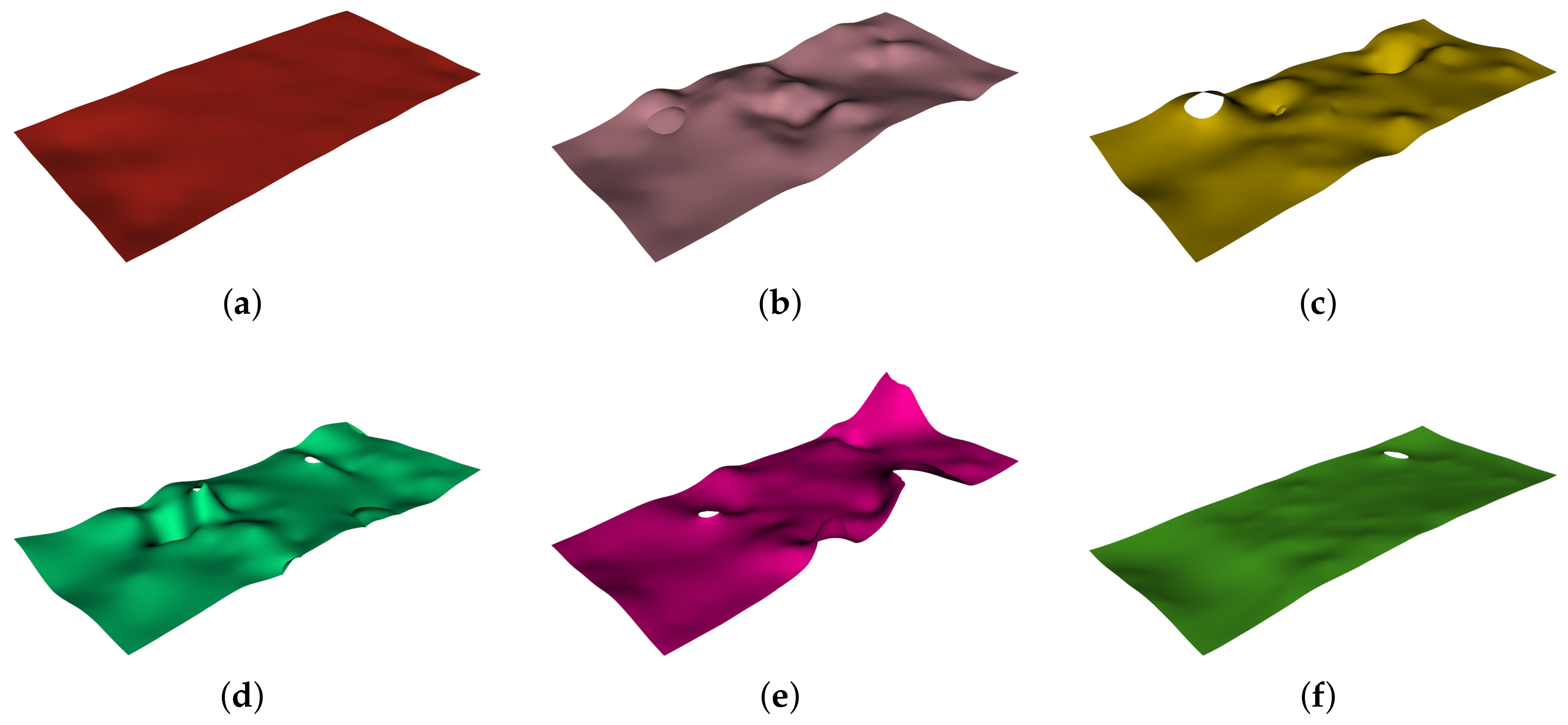
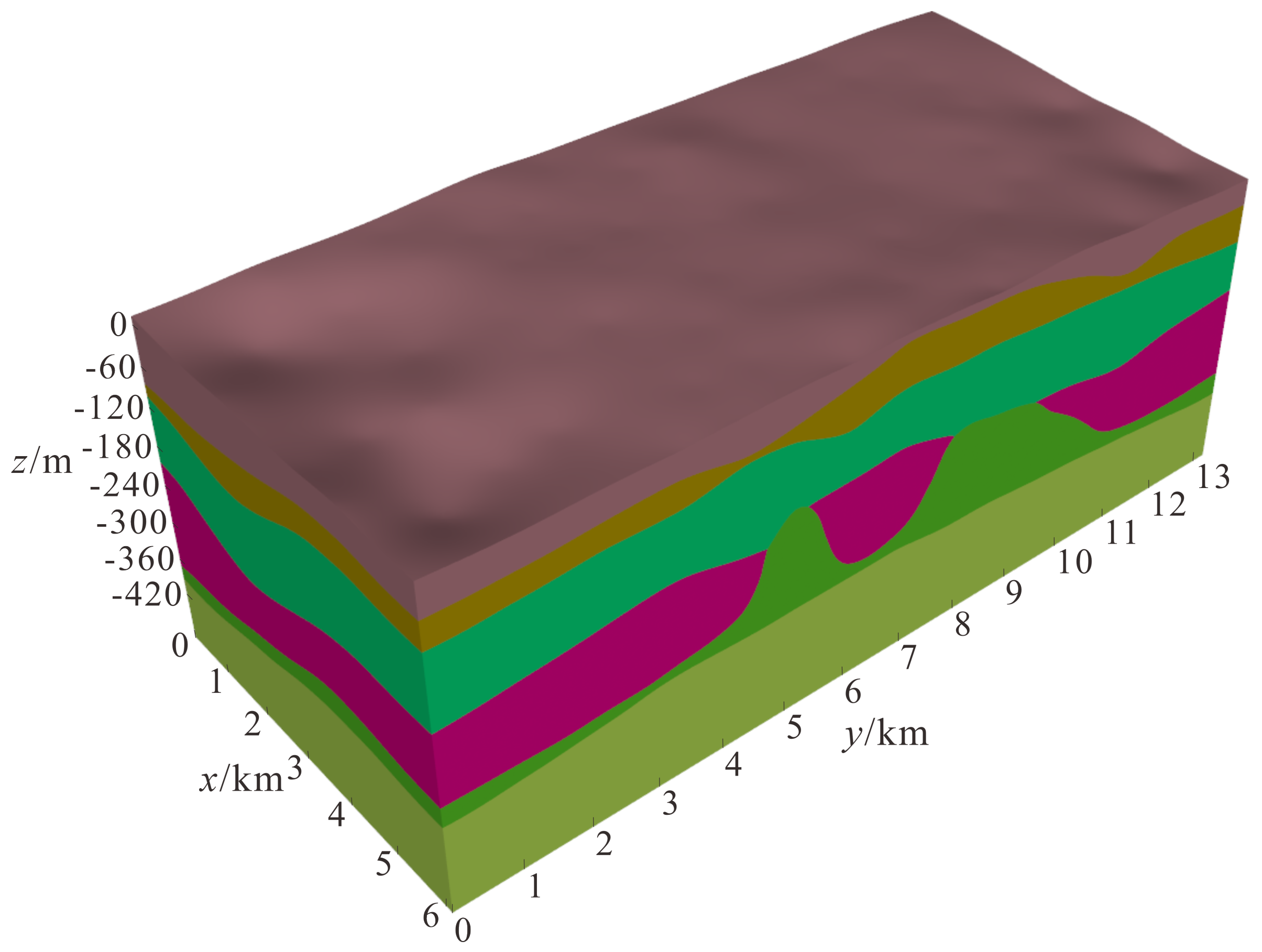
3.1. Geological Model Visualization Results
3.2. Influence of Parameters
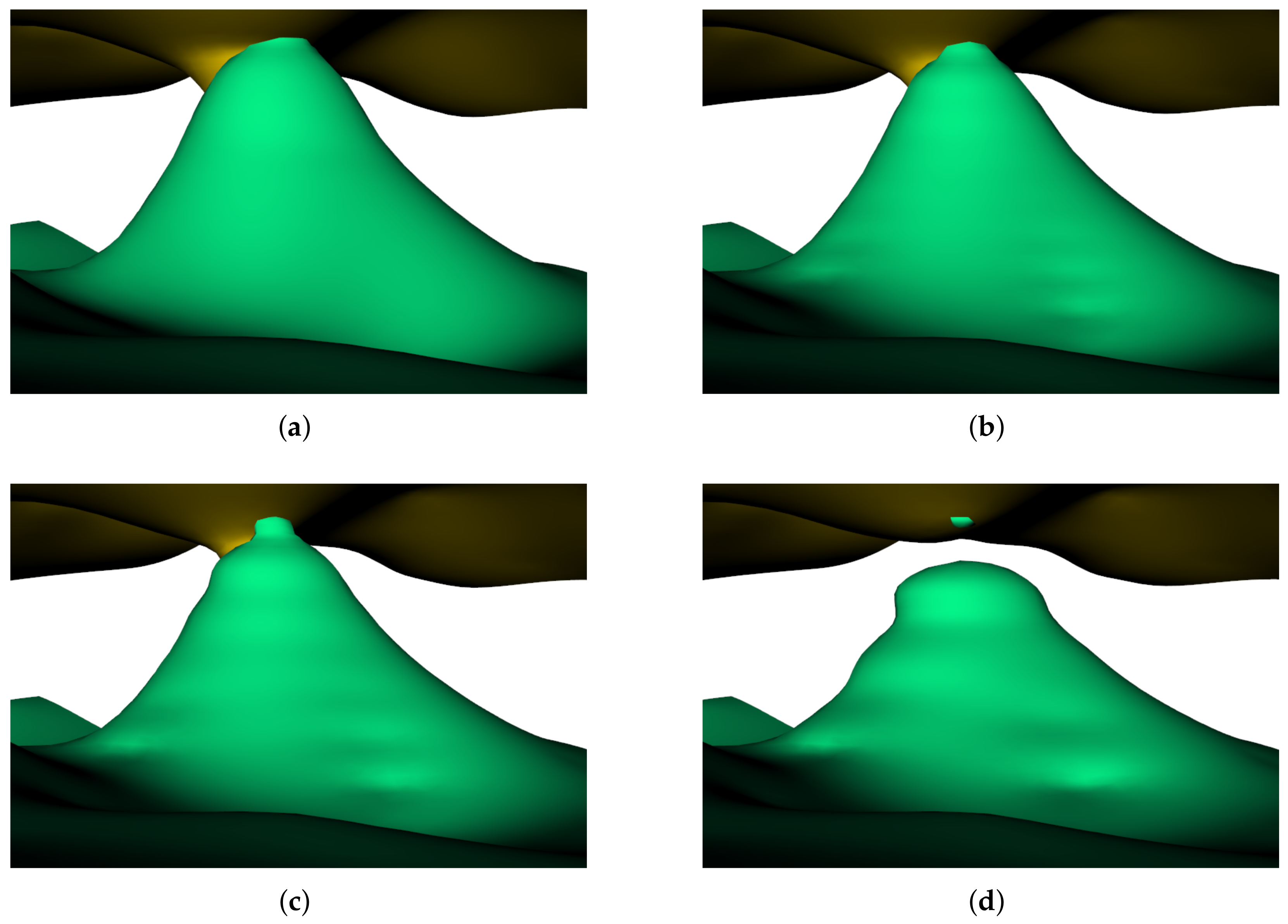
3.2.1. Influence of Grid Size
3.2.2. Influence of Data Point Spacing
3.3. Validation of Model Accuracy
3.4. GPU Acceleration Verification
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wijns, C.; Boschetti, F.; Moresi, L. Inverse modelling in geology by interactive evolutionary computation. J. Struct. Geol. 2003, 25, 1615–1621. [Google Scholar] [CrossRef]
- Madsen, R.B.; Høyer, A.S.; Andersen, L.T.; Møller, I.; Hansen, T.M. Geology-driven modeling: A new probabilistic approach for incorporating uncertain geological interpretations in 3D geological modeling. Eng. Geol. 2022, 309, 106833. [Google Scholar] [CrossRef]
- Wang, X.; Guo, J.; Fu, S.; Zhang, H.; Liu, S.; Zhang, X.; Liu, Z.; Dun, L. Towards automatic and rapid 3D geological modelling of urban sedimentary strata from a large amount of borehole data using a parallel solution of implicit equations. Earth Sci. Inform. 2024, 17, 421–440. [Google Scholar]
- Guo, J.; Wang, J.; Wu, L.; Liu, L.; Li, C.; Li, F.; Lin, M.; Jessell, M.W.; Li, P.; Dai, X.; et al. Explicit-implicit-integrated 3-D geological modelling approach: A case study of the Xianyan Demolition Volcano (Fujian, China). Tectonophysics 2020, 795, 228648. [Google Scholar] [CrossRef]
- Yang, H.Q.; Chu, J.; Wu, S.; Zhu, X.; Qi, X.; Chiam, K. Advancing geological modelling and geodata management: A web-based system with AI assessment in Singapore. Georisk 2024, 19, 218–232. [Google Scholar] [CrossRef]
- Thorleifson, H.; Berg, R.C.; Russell, H.A.J. Geological mapping goes 3-D in response to societal needs. GSA Today 2010, 20, 27–29. [Google Scholar] [CrossRef]
- Martin-Izard, A.; Arias, D.; Arias, M.; Gumiel, P.; Sanderson, D.J.; Castañon, C.; Lavandeira, A.; Sanchez, J. A new 3D geological model and interpretation of structural evolution of the world-class Rio Tinto VMS deposit, Iberian Pyrite Belt (Spain). Ore Geol. Rev. 2015, 71, 457–476. [Google Scholar] [CrossRef]
- Ming, J.; Pan, W.; Qu, H.; Ge, Z. GSIS: A 3D geological multi-body modeling system from netty cross-sections with topology. Comput. Geosci. 2010, 36, 756–767. [Google Scholar]
- Guo, J.; Wu, L.; Zhou, W.; Li, C.; Li, F. Section-constrained local geological interface dynamic updating method based on the HRBF surface. J. Struct. Geol. 2018, 107, 64–72. [Google Scholar] [CrossRef]
- González-Garcia, J.; Jessell, M. A 3D geological model for the Ruiz-Tolima Volcanic Massif (Colombia): Assessment of geological uncertainty using a stochastic approach based on Bézier curve design. Tectonophysics 2016, 687, 139–157. [Google Scholar]
- Cowan, E.J.; Beatson, R.K.; Ross, H.J.; Fright, W.R.; McLennan, T.J.; Evans, T.R.; Carr, J.C.; Lane, R.J.; Bright, D.V.; Gillman, A.J.; et al. Practical implicit geological modelling. In Proceedings of the 5th International Mining Geology Conference, Bendigo, VIC, Australia, 17–19 November 2003. [Google Scholar]
- Vollgger, S.A.; Cruden, A.R.; Cowan, J.E. 3D implicit geological modelling of a gold deposit from a structural geologist’s point of view. In Proceedings of the 12th SGA Biennial Meeting—Mineral Deposit Research for a High-Tech World, Uppsala, Sweden, 12–15 August 2013. [Google Scholar]
- Calcagno, P.; Chilès, J.P.; Courrioux, G.; Guillen, A. Geological modelling from field data and geological knowledge: Part I. Modelling method coupling 3D potential-field interpolation and geological rules. Phys. Earth Planet. Inter. 2008, 171, 147–157. [Google Scholar]
- Guo, F.; Zheng, B.; Qi, S.; Li, H.; Zhu, H.; Yue, Y.; Xie, H. A review of 3D geological modeling technology and methods. J. Eng. Geol. 2024, 32, 1143–1153. (In Chinese) [Google Scholar]
- Li, J.; Liu, P.; Wang, X.; Cui, H.; Ma, Y. 3D geological implicit modeling method of regular voxel splitting based on layered interpolation data. Sci. Rep. 2022, 12, 13840. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Zhao, H.; Bi, L.; Wang, L. Implicit 3D modeling of ore body from geological boreholes data using hermite radial basis functions. Minerals 2018, 8, 443. [Google Scholar] [CrossRef]
- Zhong, D.; Wang, L.; Bi, L.; Jia, M. Implicit modeling of complex orebody with constraints of geological rules. T. Nonferr. Metal. Soc. 2019, 29, 2392–2399. [Google Scholar]
- Wilde, B.J.; Deutsch, C.V. Kriging and simulation in presence of stationary domains: Developments in boundary modeling. In Proceedings of the Geostatistics Oslo 2012, Oslo, Norway, 11–15 June 2012. [Google Scholar]
- Pereira, P.E.C.; Rabelo, M.N.; Ribeiro, C.C.; Diniz-Pinto, H.S. Geological modeling by an indicator kriging approach applied to a limestone deposit in Indiara city-Goiás. REM Int. Eng. J. 2017, 70, 331–337. [Google Scholar]
- Chen, G.; Zhu, J.; Qiang, M.; Gong, W. Three-dimensional site characterization with borehole data—A case study of Suzhou area. Eng. Geol. 2018, 234, 65–82. [Google Scholar]
- Pakyuz-Charrier, E.; Lindsay, M.; Ogarko, V.; Giraud, J.; Jessell, M. Monte Carlo simulation for uncertainty estimation on structural data in implicit 3-D geological modeling, a guide for disturbance distribution selection and parameterization. Solid Earth 2018, 9, 385–402. [Google Scholar]
- Macêdo, I.; Gois, J.P.; Velho, L. Hermite radial basis functions implicits. Comput. Graph. Forum 2011, 30, 27–42. [Google Scholar]
- Guo, J.; Wang, J.; Wu, L.; Zhu, W.; Jessell, M.; Li, C.; Li, F.; Hu, H. Automatic and dynamic updating of three-dimensional ore body models from borehole and excavation data using the implicit function HRBF. Ore Geol. Rev. 2022, 148, 105018. [Google Scholar]
- Zhang, Q.; Zhu, H. Collaborative 3D geological modeling analysis based on multi-source data standard. Eng. Geol. 2018, 246, 233–244. [Google Scholar] [CrossRef]
- Vollgger, S.A.; Cruden, A.R.; Ailleres, L.; Cowan, E.J. Regional dome evolution and its control on ore-grade distribution: Insights from 3D implicit modelling of the Navachab gold deposit, Namibia. Ore Geol. Rev. 2015, 69, 268–284. [Google Scholar] [CrossRef]
- Guo, J.; Wang, X.; Wang, J.; Dai, X.; Wu, L.; Li, C.; Li, F.; Liu, S.; Jessell, M.W. Three-dimensional geological modeling and spatial analysis from geotechnical borehole data using an implicit surface and marching tetrahedra algorithm. Eng. Geol. 2021, 284, 106047. [Google Scholar] [CrossRef]
- Lorensen, W.E.; Cline, H.E. Marching cubes: A high resolution 3D surface construction algorithm. In Seminal Graphics: Pioneering Efforts that Shaped the Field; Association for Computing Machinery: New York, NY, USA, 1998; pp. 347–353. [Google Scholar]
- Guéziec, A.; Hummel, R. Exploiting triangulated surface extraction using tetrahedral decomposition. IEEE Trans. Vis. Comput. Graph. 1995, 1, 328–342. [Google Scholar] [CrossRef]
- Wang, M.; Feng, J.; Yang, B. Comparison and Evaluation of Marching Cubes and Marching Tetrahedra. J. Comput. Aided Des. Comput. Graph. 2014, 26, 2099–2106. (In Chinese) [Google Scholar]
- Nico, G. LU-GPU: Efficient algorithms for solving dense linear systems on graphics hardware. In Proceedings of the SC’05: Proceedings of the 2005 ACM/IEEE Conference on Supercomputing, Seattle, WA, USA, 12–18 November 2005. [Google Scholar]
- Volkov, V.; Demmel, J. LU, QR and Cholesky Factorizations Using Vector Capabilities of GPUs. 2008. Available online: https://bebop.cs.berkeley.edu/pubs/volkov2008-gpu-factorizations.pdf (accessed on 14 January 2025).
- Agullo, E.; Augonnet, C.; Dongarra, J.; Faverge, M.; Ltaief, H.; Thibault, S.; Tomov, S. QR Factorization on a Multicore Node Enhanced with Multiple GPU Accelerators. In Proceedings of the 2011 IEEE International Parallel & Distributed Processing Symposium, Anchorage, AK, USA, 16–20 May 2011. [Google Scholar]
- Hardy, R.L. Multiquadric equations of topography and other irregular surfaces. J. Geophys. Res. 1971, 76, 1905–1915. [Google Scholar] [CrossRef]
- Franke, R. Scattered data interpolation: Tests of some methods. Math. Comput. 1982, 38, 181–200. [Google Scholar]
- Foley, T.A. Interpolation and approximation of 3-D and 4-D scattered data. Comput. Math. Appl. 1987, 13, 711–740. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Interface | MAE | RMSE | CCC |
|---|---|---|---|
| Ground surface | 3.791 | 5.155 | 0.948 |
| Base of the first stratum | 7.691 | 9.296 | 0.866 |
| Base of the second stratum | 11.456 | 14.695 | 0.783 |
| Base of the third stratum | 12.578 | 15.901 | 0.758 |
| Base of the fourth stratum | 14.346 | 17.380 | 0.707 |
| Base of the fifth stratum | 3.272 | 5.095 | 0.987 |
| Number of Data Points | CPU Time Consumption | GPU Time Consumption |
|---|---|---|
| 2000 | 59.5 min | 3.2 s |
| 4000 | 7.4 h | 14.9 s |
| 6000 | 23.2 h | 28.3 s |
| 8000 | 50.7 h | 49.2 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, P.; Li, Z.; Yu, G.; Li, Z. Three-Dimensional Geological Modeling Method Based on Potential Vector Fields. Appl. Sci. 2025, 15, 3594. https://doi.org/10.3390/app15073594
Liu P, Li Z, Yu G, Li Z. Three-Dimensional Geological Modeling Method Based on Potential Vector Fields. Applied Sciences. 2025; 15(7):3594. https://doi.org/10.3390/app15073594
Chicago/Turabian StyleLiu, Peigang, Zheng Li, Gang Yu, and Zongmin Li. 2025. "Three-Dimensional Geological Modeling Method Based on Potential Vector Fields" Applied Sciences 15, no. 7: 3594. https://doi.org/10.3390/app15073594
APA StyleLiu, P., Li, Z., Yu, G., & Li, Z. (2025). Three-Dimensional Geological Modeling Method Based on Potential Vector Fields. Applied Sciences, 15(7), 3594. https://doi.org/10.3390/app15073594