
The Performance Study of a Novel Vertical Variable Stiffness Disc Spring Seismic Isolation Bearing


Abstract
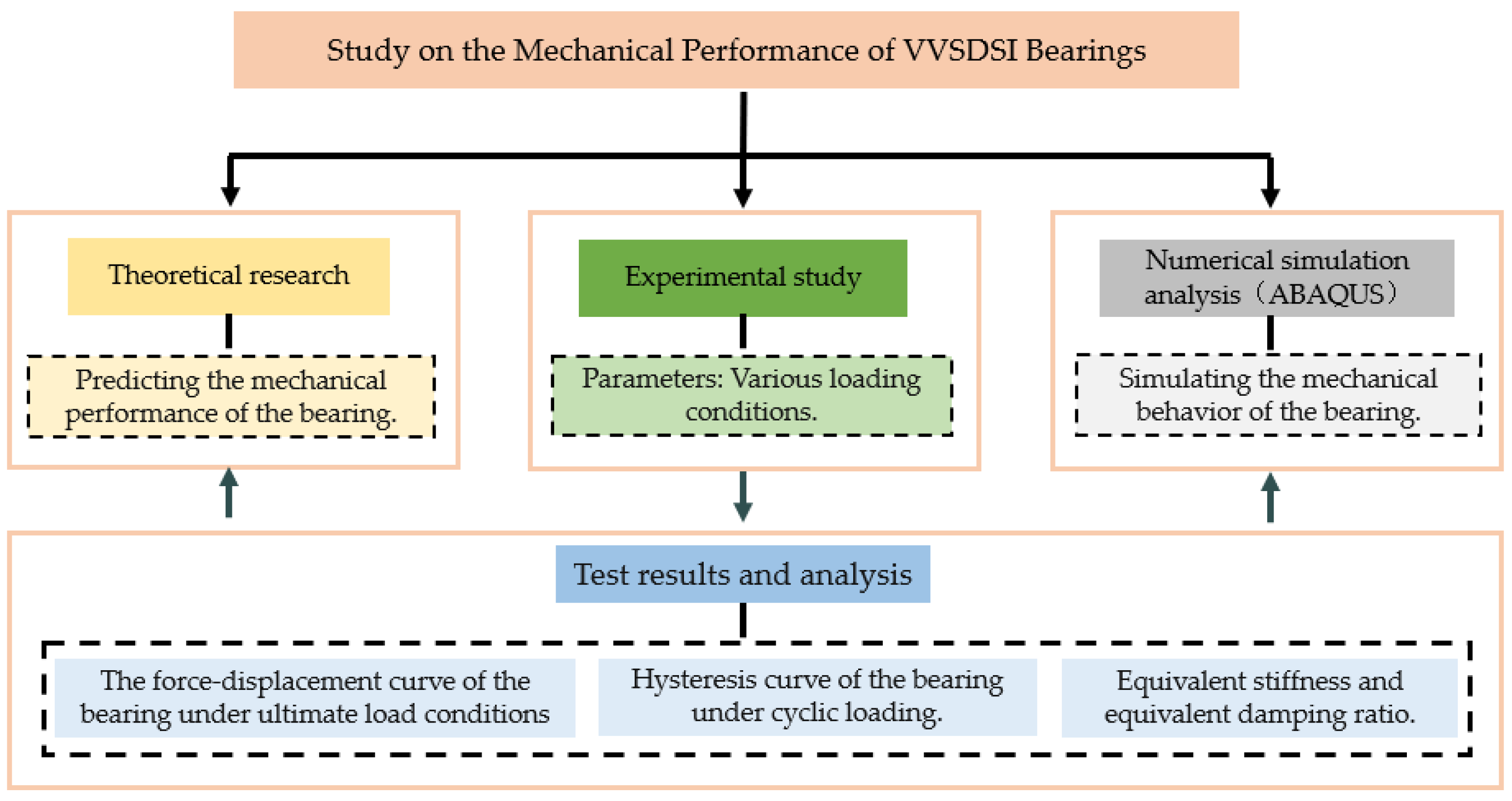
1. Introduction
2. Working Mechanism of VVSDSI Bearing
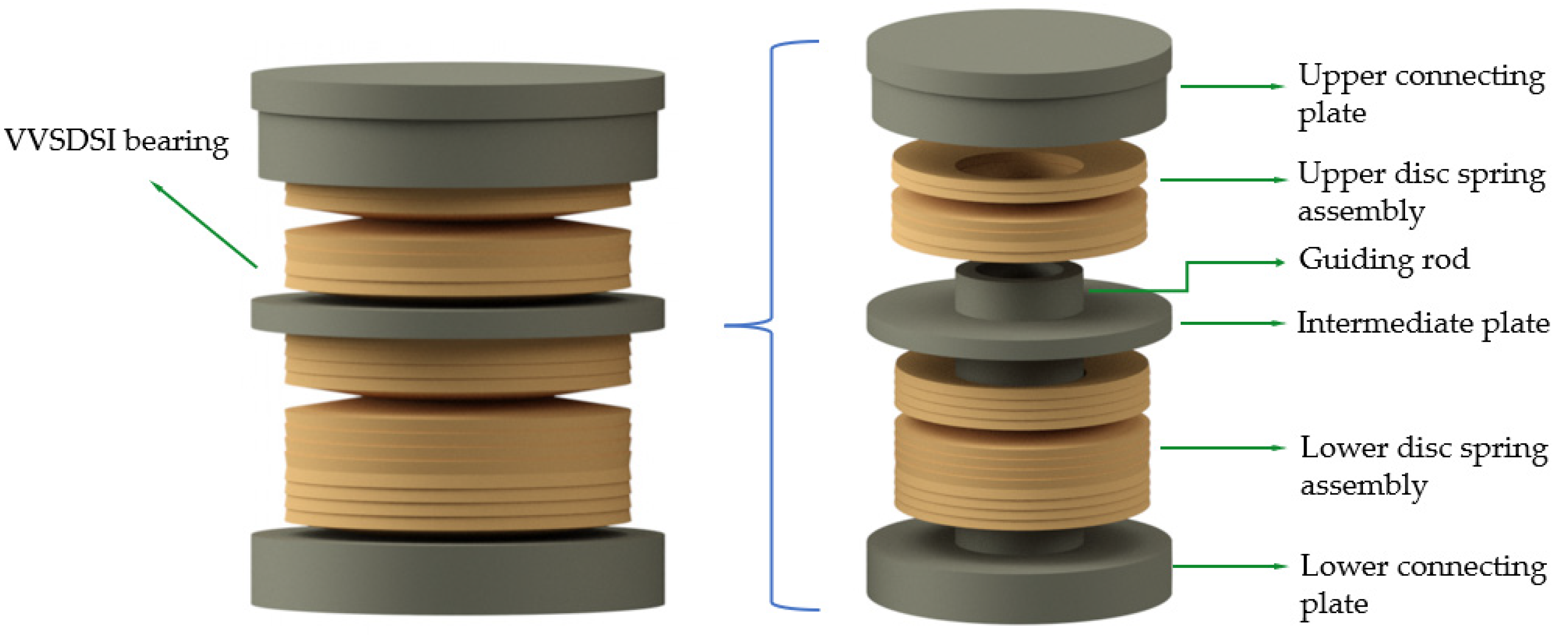
2.1. Structural Construction
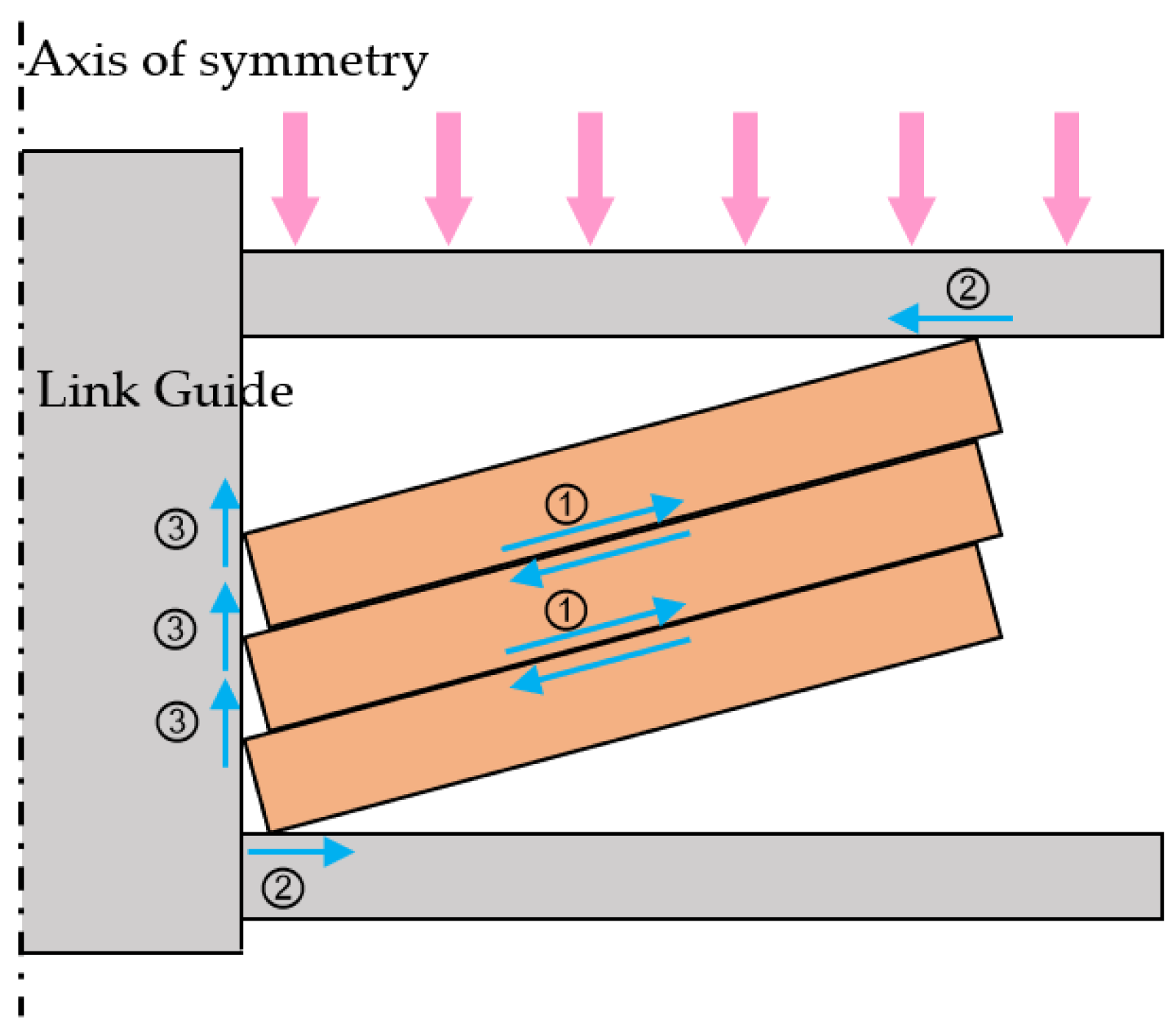
2.2. Operational Mechanism
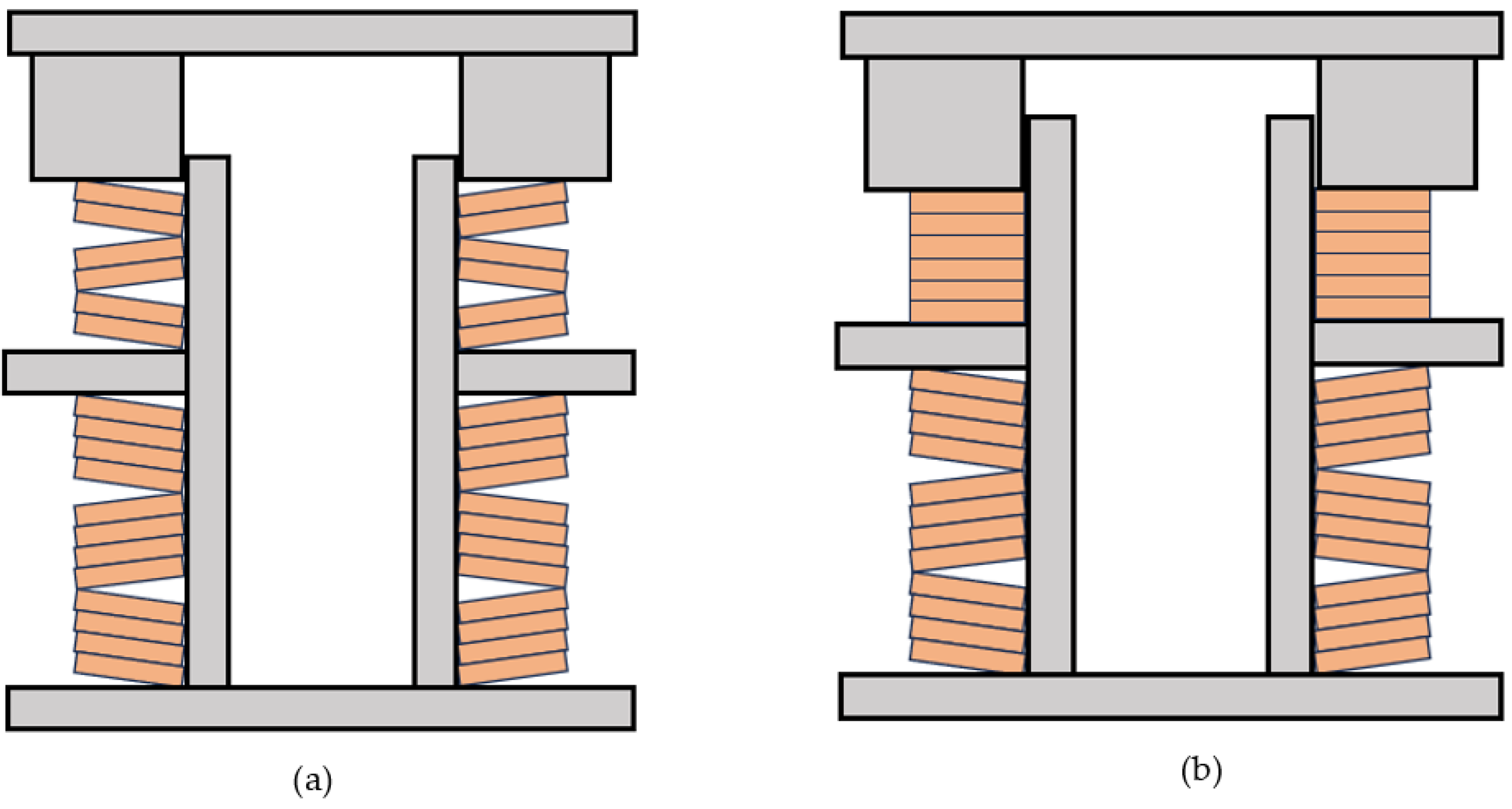
2.3. Characteristic Working Status
2.4. Theoretical Study of VVSDSI Bearings
2.4.1. Mechanical Properties of Disc Springs
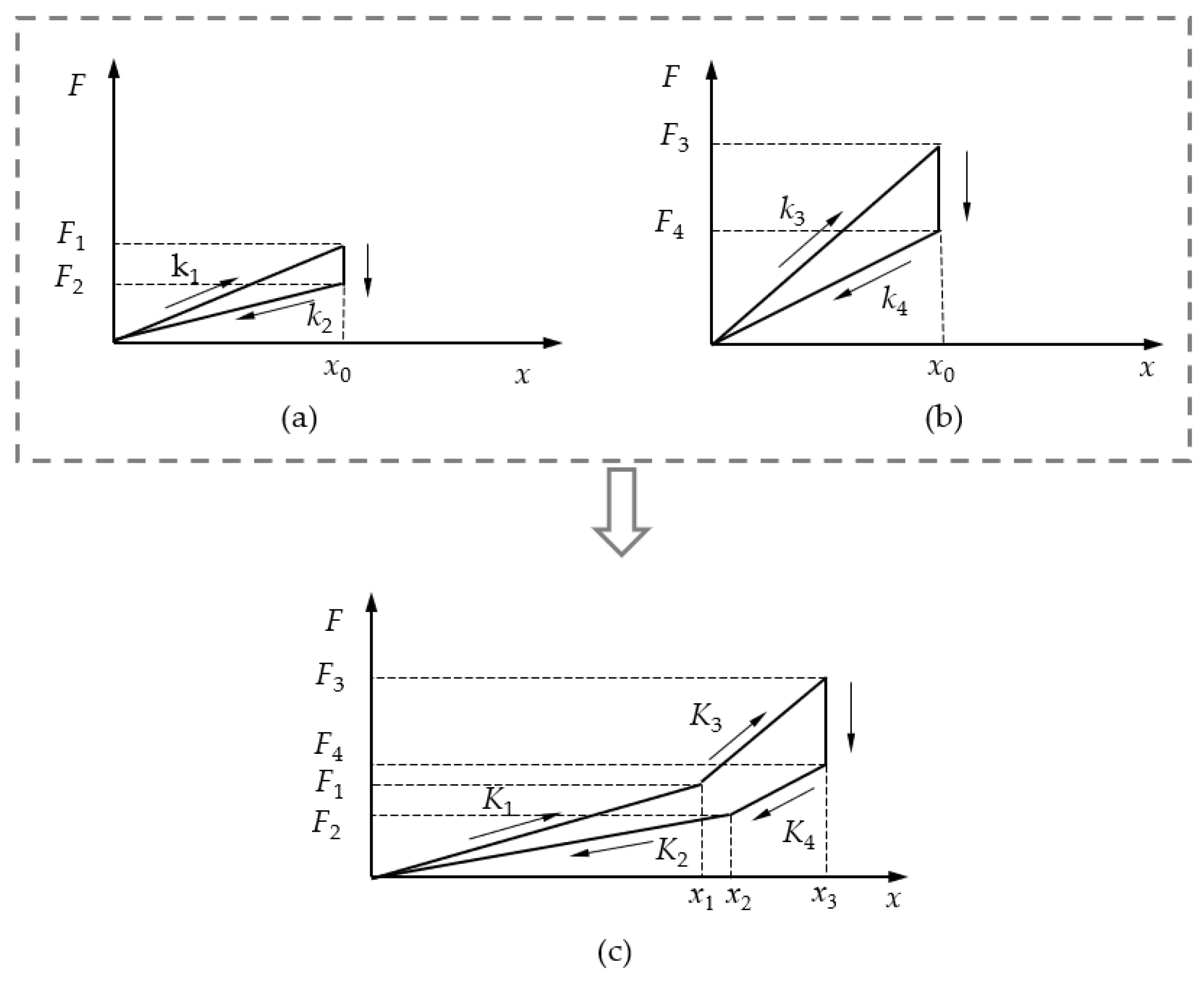
2.4.2. Theoretical Hysteresis Model of VVSDSI Bearing
3. Test Program
3.1. Specimen Design
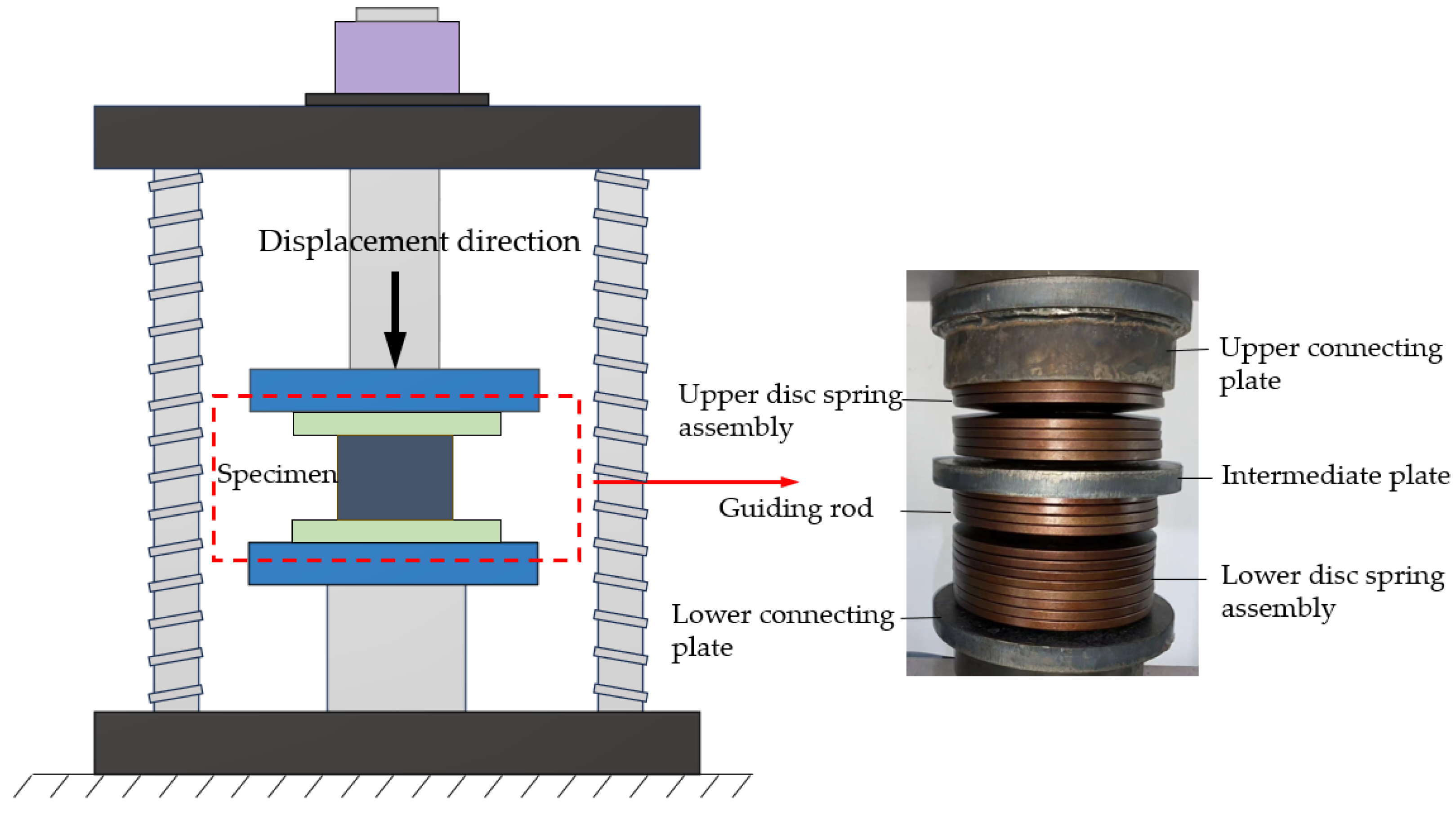
3.2. Test Device
3.3. Loading Protocol
- (1)
- Ultimate load test: Based on the characteristics of the bearing, the displacement control method was used for loading. During the test, the specimen was slowly loaded from the initial state to the ultimate state (the upper and lower disc springs were completely flattened) and then unloaded. To ensure the accuracy of the results, the test was repeated 3 times, and all load-displacement curve data were recorded.
- (2)
- Cyclic load test: The bearing is cyclically loaded using the displacement control method. During the test, the preloading displacement is 16, 23, and 30 mm; the loading frequency is 0.02 Hz, and the loading amplitude is 1, 2, 4, and 6 mm. Each test is completed after three reverse loadings, and the load-displacement hysteresis curve data of the bearing are recorded.
4. Test Results and Discussion
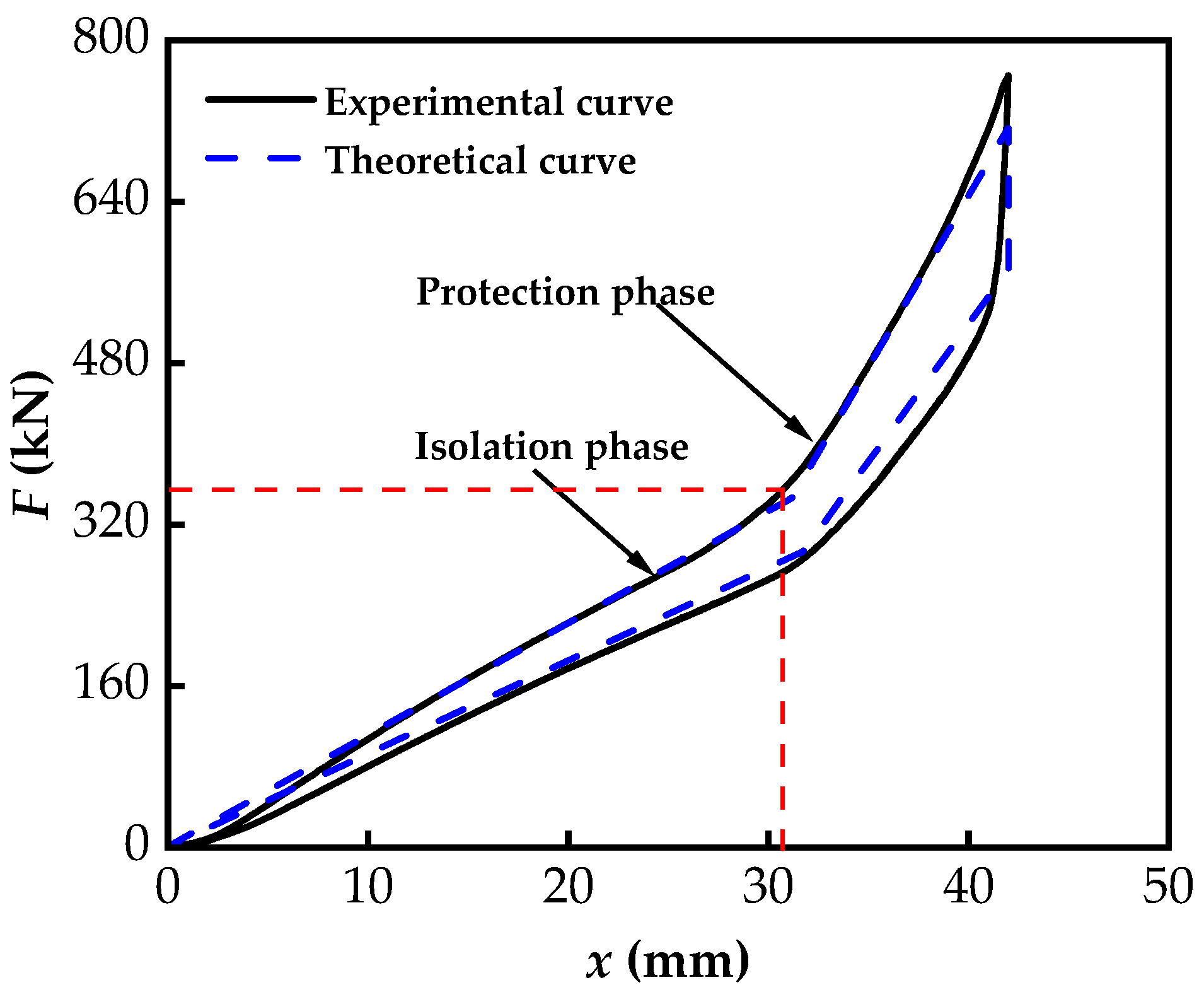
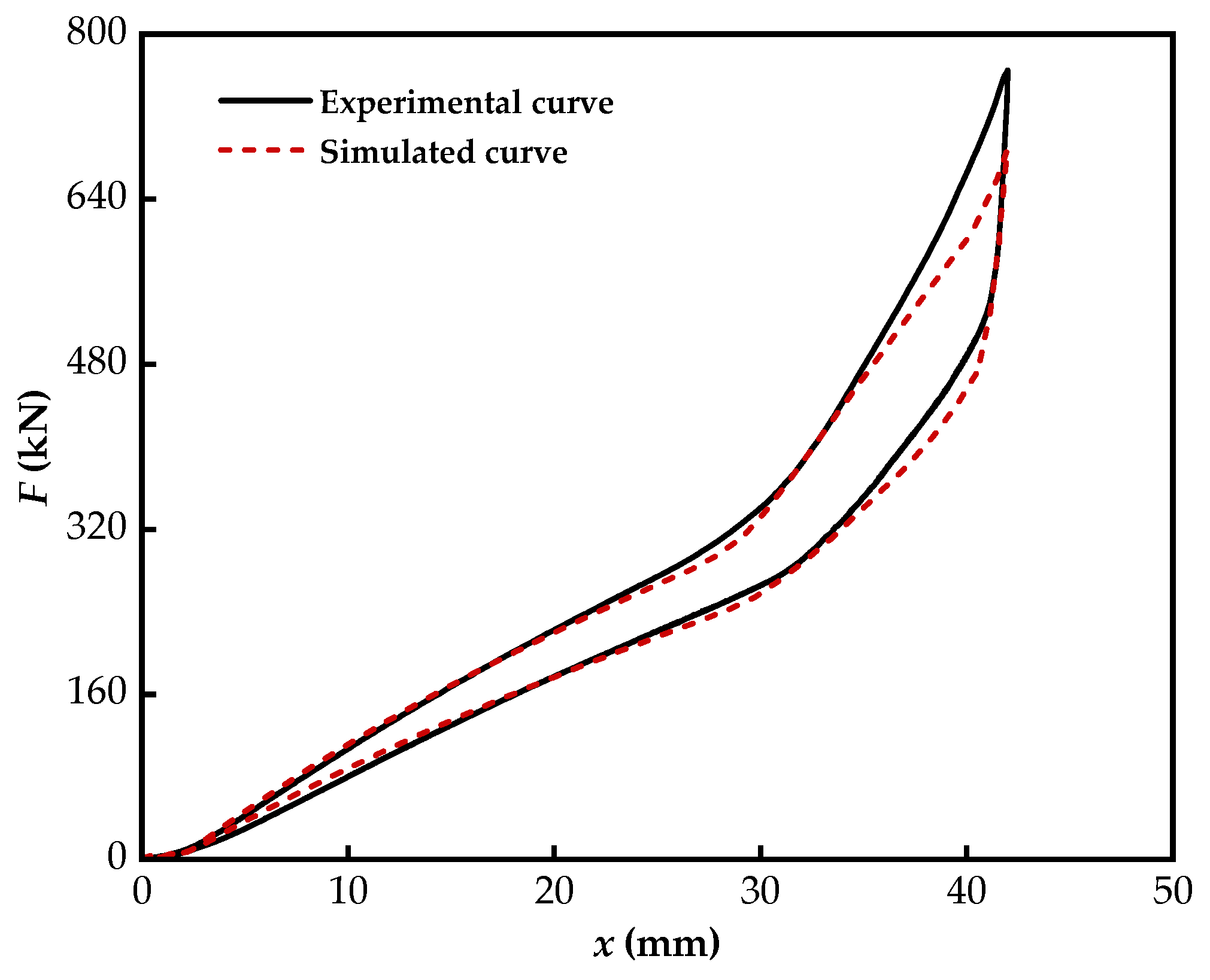
4.1. Results and Analysis of the Ultimate Load Test
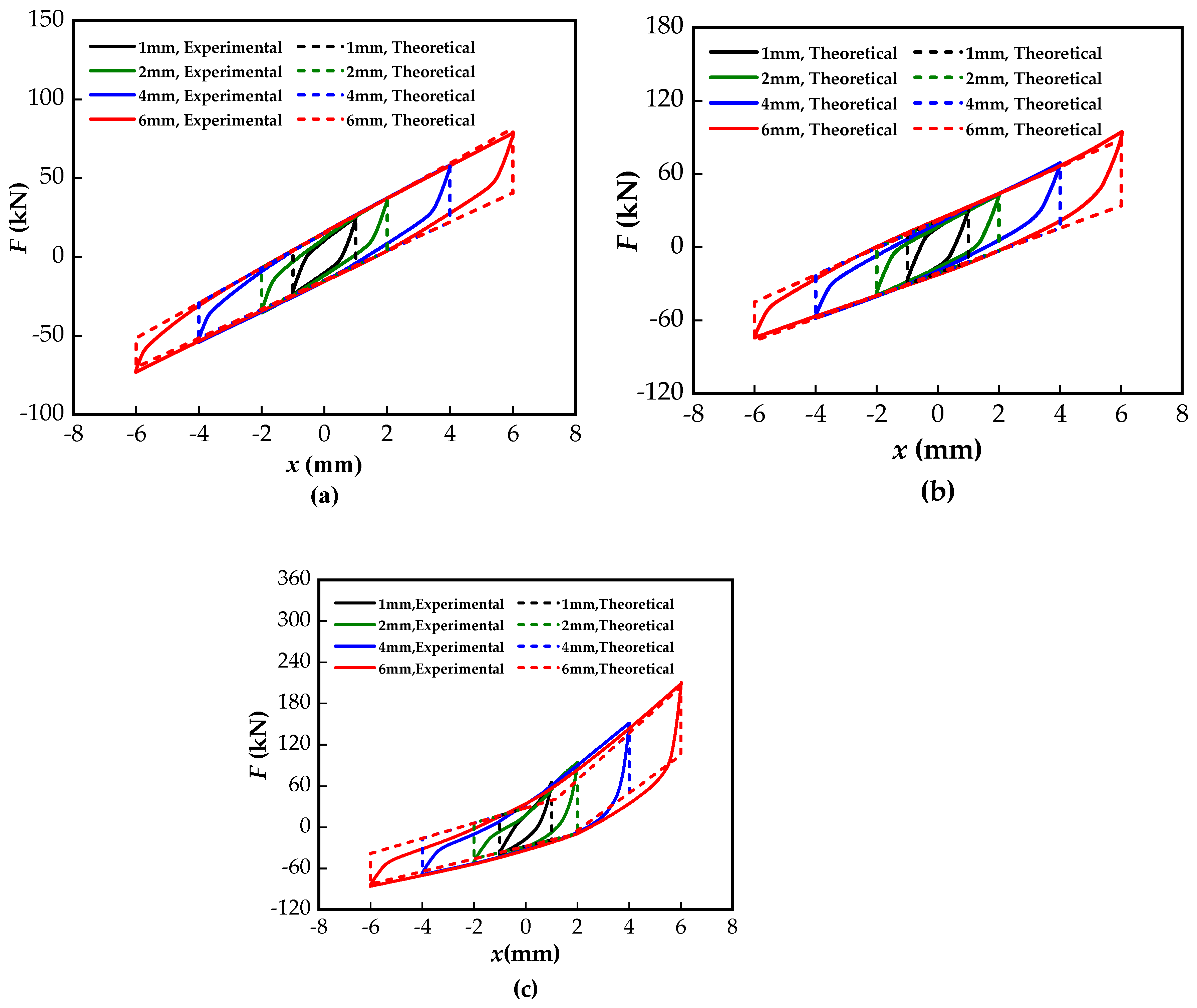
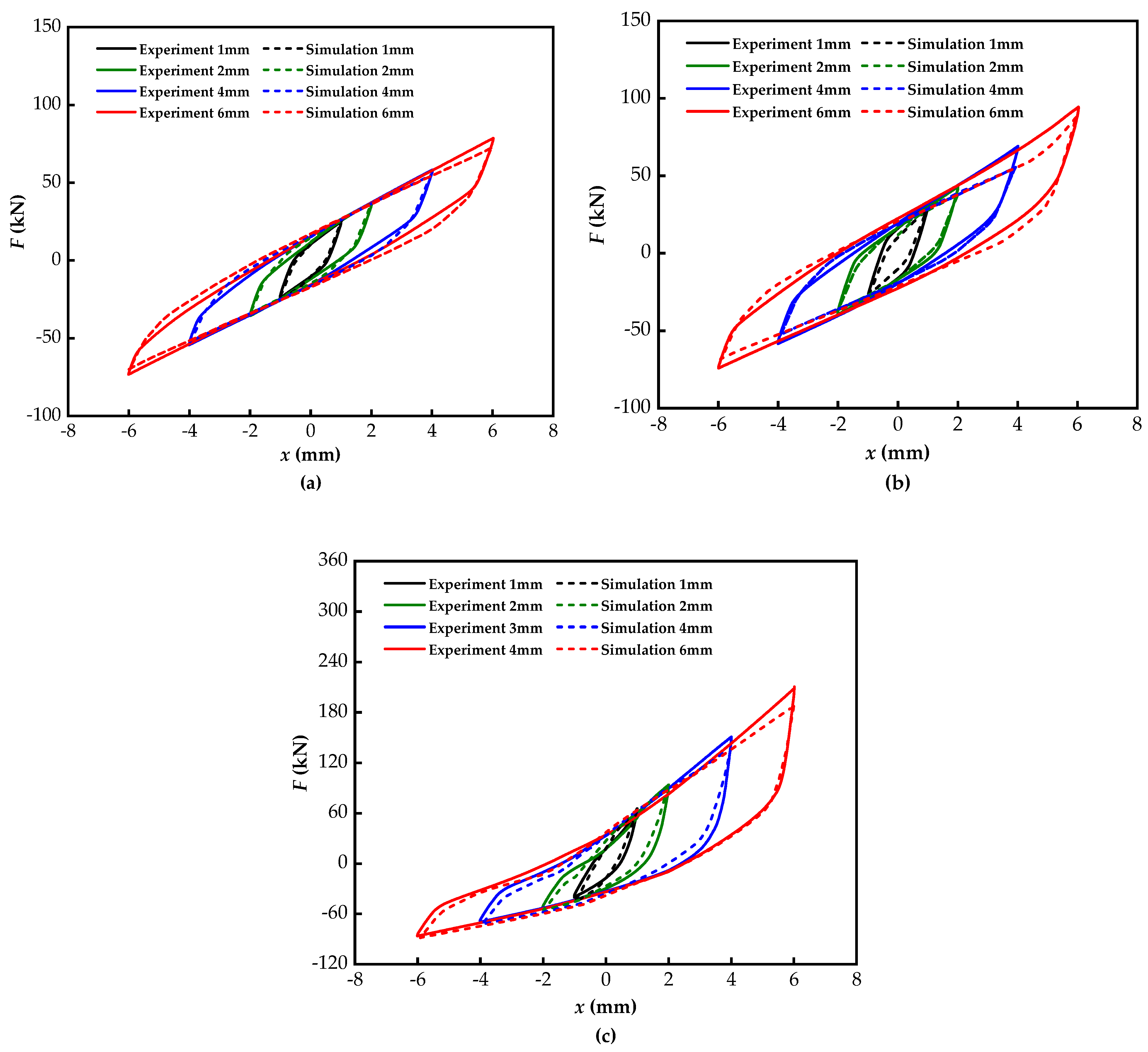
4.2. Results and Analysis of the Cyclic Load Test
4.3. Performance Comparison Between VVSDSI Seismic Isolation Bearings and Traditional Disc Spring Seismic Isolation Bearings
5. Numerical Simulation of VVSDSI Bearing
5.1. Element Type and Material Constitutive Model
5.2. Contact Unit Definition
5.3. Boundary Conditions and Loading Configuration
5.4. Comparative Analysis of Test Results and Numerical Simulation Results
6. Conclusions
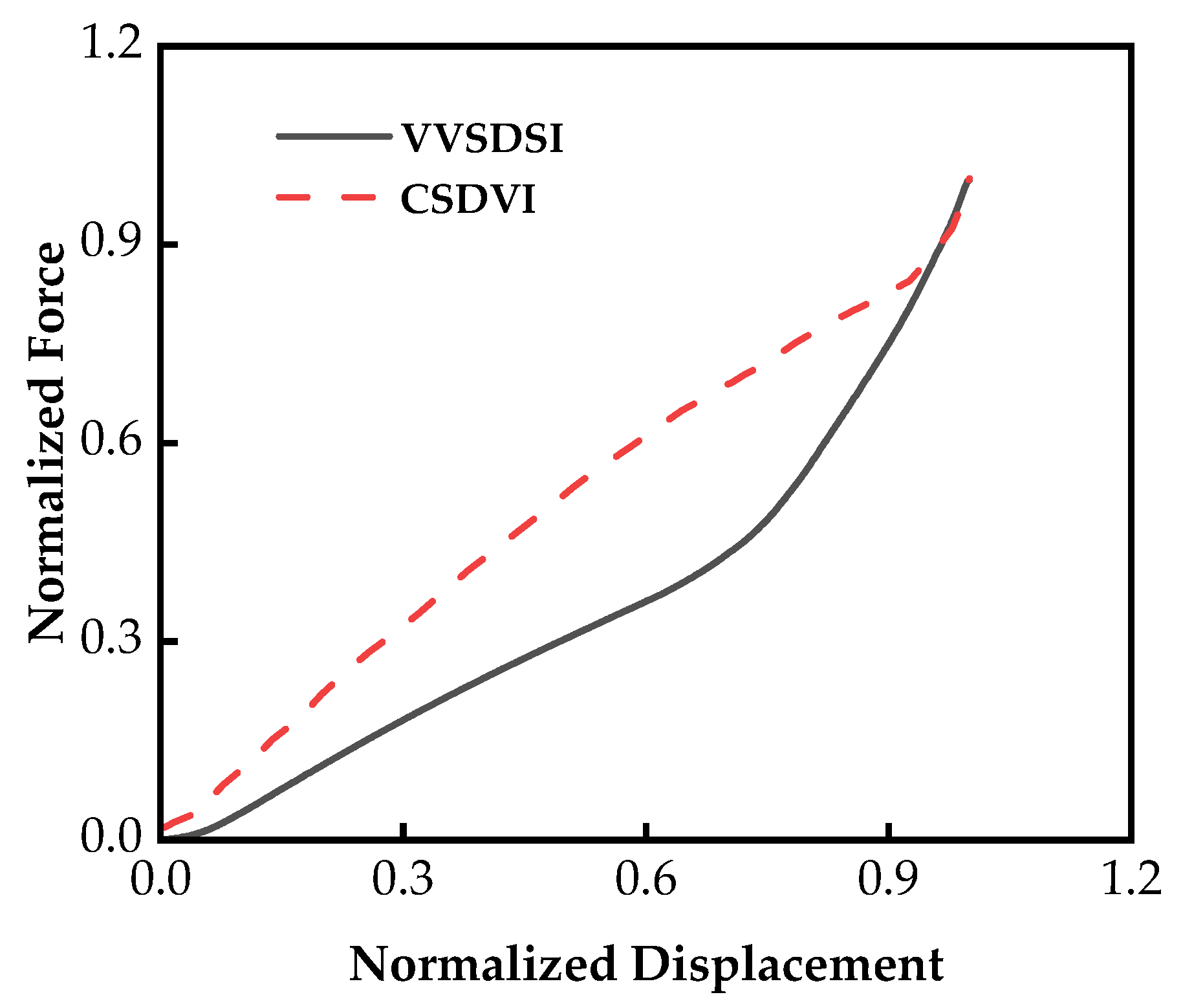
- Compared to traditional disc spring bearings, the proposed VVSDSI bearing in this study demonstrates two distinct vertical stiffness stages. During the isolation phase, the VVSDSI isolation bearing exhibits lower stiffness with a bilinear hysteretic curve. As the displacement load increases and the bearing enters the protection stage, its vertical stiffness shows significant enhancement.
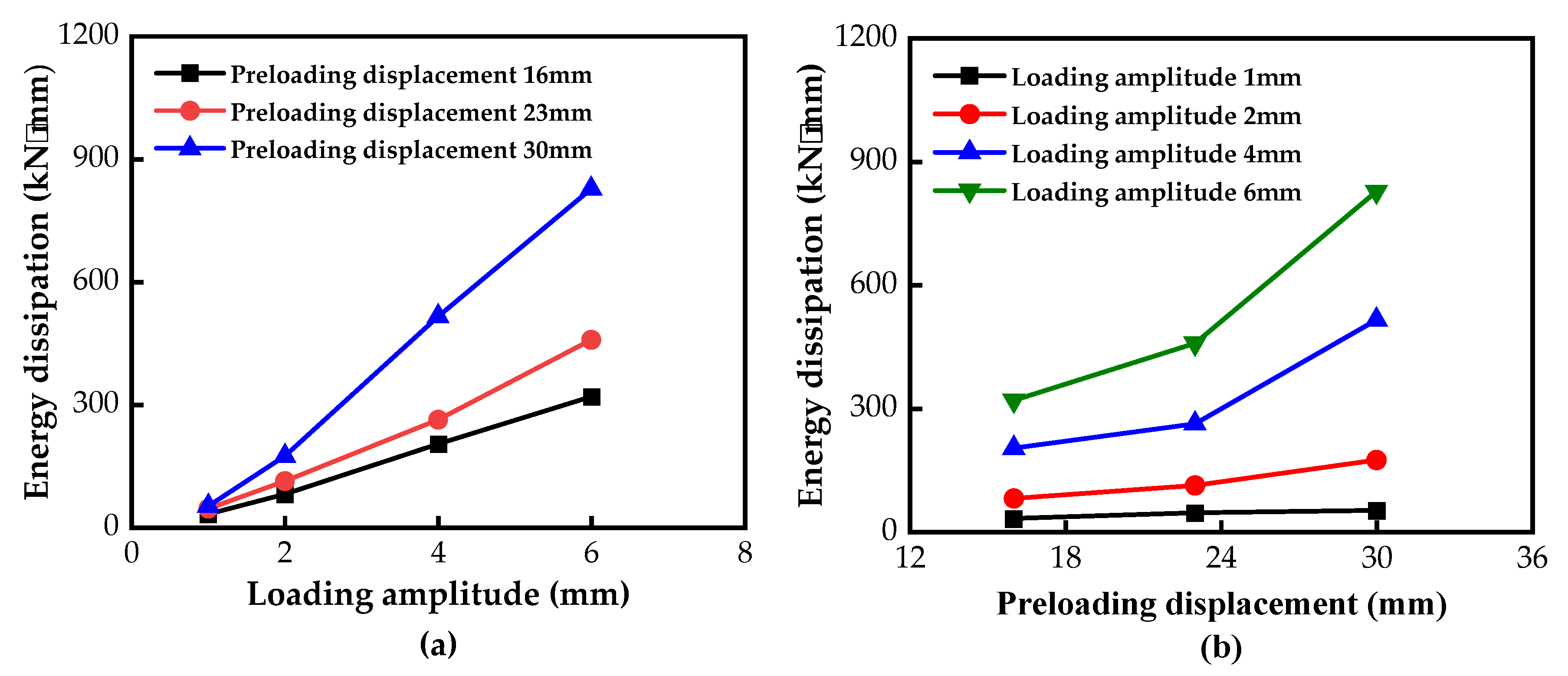
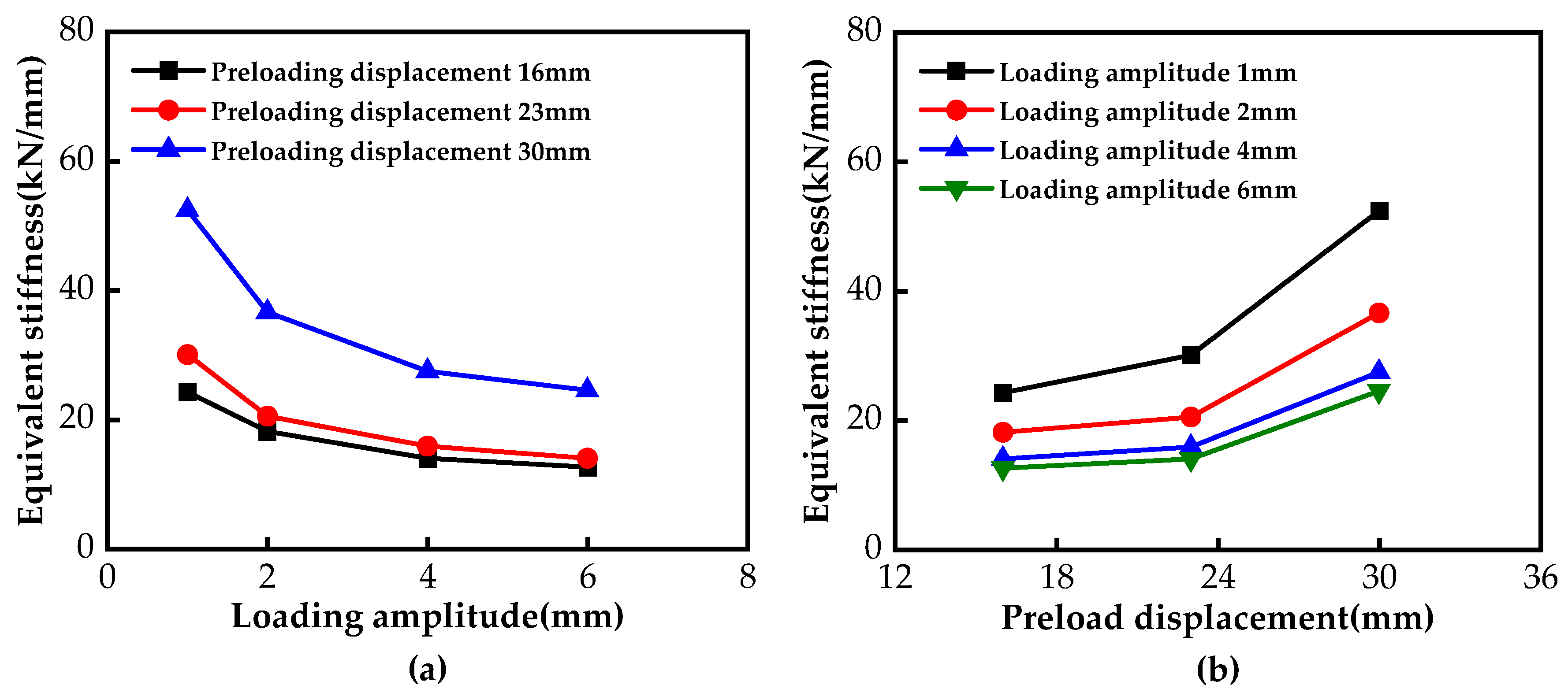
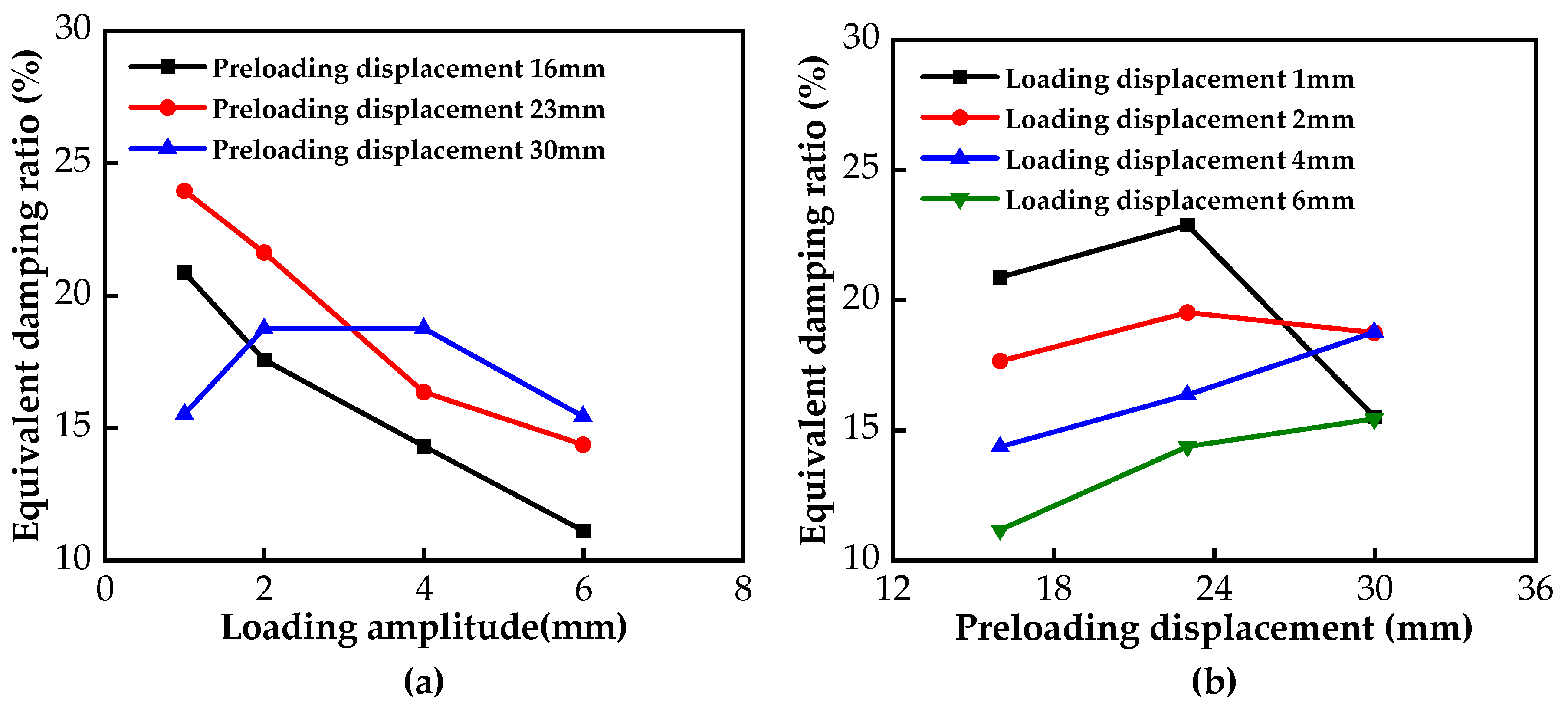
- The load-displacement hysteresis curve of the VVSDSI bearing exhibits typical asymmetry. Studies have shown that increasing the preloading displacement results in a fuller hysteresis curve, enhancing the energy dissipation capacity of the bearing. In contrast, increasing the load amplitude reduces the fullness of the hysteresis curve and exacerbates its asymmetry. During the seismic isolation phase, the preloading displacement is positively correlated with the equivalent stiffness and damping ratio, while the load amplitude shows a negative correlation with these parameters.
- A comparison between the experimental and theoretical results shows that the maximum errors for Fmax and Fmin are 7.13% and 3.45%, respectively, with average errors of 2.20% and 1.23%. The average error in the equivalent stiffness (Ke) is 6.53%. These findings demonstrate that the theoretical model is accurate enough to predict the actual mechanical behavior and can be applied for design purposes.
- Under the action of ultimate load and cyclic load, the load-displacement hysteresis curve characteristics of the VVSDSI bearing simulation and test are similar, and the simulation results are in good agreement with the experimental results. Among them, the peak load error is 10.07%, and the average error of the equivalent stiffness value is 5.32%.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| VVSDSI | Vertical Variable Stiffness Disc Spring Isolation |
References
- Warn, G.P.; Ryan, K.L. A Review of Seismic Isolation for Buildings: Historical Development and Research Needs. Buildings 2012, 2, 300–325. [Google Scholar] [CrossRef]
- Calvi, P.M.; Calvi, G.M. Historical development of friction-based seismic isolation systems. Soil Dyn. Earthq. Eng. 2018, 106, 14–30. [Google Scholar] [CrossRef]
- Rakicevic, Z.; Bogdanovic, A.; Farsangi, E.N.; Sivandi-Pour, A. A Hybrid Seismic Isolation System Toward More Resilient Structures: Shaking Table Experiment and Fragility Analysis. J. Build. Eng. 2021, 38, 102194. [Google Scholar] [CrossRef]
- Papazoglou, A.; Elnashai, A. Analytical and field evidence of the damaging effect of vertical earthquake ground motion. Earthq. Eng. Struct. Dyn. 1996, 25, 1109–1137. [Google Scholar] [CrossRef]
- Bozorgnia, Y.; Niazi, M.; Campbell, K.W. Characteristics of free-field vertical ground motion during the Northridge earthquake. Earthq. Spectra 1995, 11, 515–525. [Google Scholar] [CrossRef]
- Shabestari, K.T.; Yamazaki, F. Near-fault spatial variation in strong ground motion due to rupture directivity and hanging wall effects from the Chi-Chi, Taiwan earthquake. Earthq. Eng. Struct. Dyn. 2010, 32, 2197–2219. [Google Scholar] [CrossRef]
- Xue, Q. Need of performance-based earthquake engineering in Taiwan: A lesson from the Chichi earthquake. Earthq. Eng. Struct. Dyn. 2000, 29, 1609–1627. [Google Scholar] [CrossRef]
- Zhang, Y.; Dong, S.; Hou, C.; Jusong, S.; Zhonghai, W.; Hailong, L.; Ping, S.; Gang, L. Seismogenic Structure of the April 20, 2013, Lushan Ms7 Earthquake in Sichuan. Acta Geol. Sin. 2013, 87, 13. [Google Scholar] [CrossRef]
- Liu, W.; Tian, K.; Wei, L.; He, W.; Yang, Q. Earthquake response and isolation effect analysis for separation type three-dimensional isolated structure. Bull. Earthq. Eng. 2018, 16, 6335–6364. [Google Scholar] [CrossRef]
- Xu, J.; Gao, H.; Guo, Z.; Zhao, J.; Yang, Z.; Zhao, G.; Guo, Z.; Liu, D.; Sun, W. Key technologies research on of soil-structure interaction base story isolated structure response in 3D seismic zone. Front. Earth Sci. 2023, 11, 1254042. [Google Scholar] [CrossRef]
- Makris, N.; Constantinou, M. Spring-viscous damper systems for combined seismic and vibration isolation. Earthq. Eng. Struct. Dyn. 1992, 21, 649–664. [Google Scholar] [CrossRef]
- Liang, Q.; Luo, W.; Zhou, Y.; Ke, X.; Li, J. Seismic performance of a novel three-dimensional isolation bearing. J. Build. Eng. 2022, 57, 104818. [Google Scholar] [CrossRef]
- Liang, Q.; Luo, W.; Zhou, Y.; Lu, Z.; Li, J.; He, Z. Vibration filtering effect of a novel three-dimensional isolation bearing on metro vibration isolation. Eng. Struct. 2024, 301, 117304. [Google Scholar] [CrossRef]
- Han, Q.; Jing, M.; Lu, Y.; Liu, M. Mechanical behaviors of air spring-FPS three-dimensional isolation bearing and isolation performance analysis. Soil Dyn. Earthq. Eng. 2021, 149, 106872. [Google Scholar] [CrossRef]
- Eltahawy, W.; Ryan, K.; Cesmeci, S.; Gordaninejad, F. Displacement/velocity-based control of a liquid spring—MR damper for vertical isolation. Struct. Control Health Monit. 2019, 26, e2363. [Google Scholar] [CrossRef]
- Xu, Z.; Huang, X.; Guo, Y.; Wang, S.-A. Study of the properties of a multi-dimensional earthquake isolation device for reticulated structures. J. Constr. Steel Res. 2013, 88, 63–78. [Google Scholar] [CrossRef]
- Xu, Z.; Gai, P.; Zhao, H.; Huang, X.-H.; Lu, L.-Y. Experimental and theoretical study on a building structure controlled by multi-dimensional earthquake isolation and mitigation devices. Nonlinear Dyn. 2017, 89, 723–740. [Google Scholar] [CrossRef]
- Hong, X.J.; Zhu, S.; Xu, Y.L. Three-dimensional vibration control of high-tech facilities against earthquakes and microvibration using hybrid platform. Earthq. Eng. Struct. Dyn. 2010, 39, 615–634. [Google Scholar] [CrossRef]
- Xue, S.; Zhu, T. Performance test study of vertical isolation bearings with disc springs. In Proceedings of the 16th National Structural Engineering Conference, Paris, France, 28–31 July 2007; Volume III. [Google Scholar]
- Yang, Q.; Guo, Y.; Fu, H.; Li, X. Experimental study on the vertical seismic isolation performance of an array of disc springs column supports. Build. Struct. 2017, 47, 330–335. [Google Scholar]
- Li, A.; Wang, W. Three-dimensional multi-functional vibration isolation bearing design and its application in vibration reduction of subway construction. Earthq. Eng. Eng. Dyn. 2014, 34, 202–208. [Google Scholar]
- Wang, W.; Wang, X. Tests, model, and applications for coned-disc-spring vertical isolation bearings. Bull. Earthq. Eng. 2020, 18, 357–398. [Google Scholar] [CrossRef]
- Zhao, Y.; Su, J.; Zhou, X.; Sui, Y. Vibration table test and numerical simulation of vertical isolation structure with dish springs. J. Build. Struct. 2008, 29, 99–106. [Google Scholar] [CrossRef]
- Xiong, S.; Huang, L.; Chen, J.; Su, J. Multi-dimensional Seismic Response Analysis of Base-Isolated Frame Structure with 3D Isolator. J. Earth Sci. 2005, 16, 66–71. [Google Scholar]
- Zhu, X.; Pan, R.; Li, J.; Lin, G. Study of isolation effectiveness of nuclear reactor building with three-dimensional seismic base isolation. Eng. Comput. 2021, 39, 1209–1233. [Google Scholar] [CrossRef]
- Somaki, T.; Nakatogawa, T.; Miyamoto, A.; Sugiyama, K.; Oyobe, Y.; Tamachi, K. Development of 3 Dimensional Base Isolation System for Nuclear Power Plants. In Proceedings of the 16th International Conference on Structural Mechanics in Reactor Technology (SMiRT 16), Washington, DC, USA, 12–17 August 2001. [Google Scholar]
- Song, R.; Song, X.; Tian, J. Mechanical and performance analysis of vertical variable stiffness isolation bearing. Build. Sci. 2022, 38, 25–33. [Google Scholar] [CrossRef]
- Chen, Z.; Ding, Y.; Shi, Y.; Li, Z. A vertical isolation device with variable stiffness for long-span spatial structures. Soil Dyn. Earthq. Eng. 2019, 123, 543–558. [Google Scholar] [CrossRef]
- Dong, W.; Shi, Y.; Wang, Q.; Wang, Y.; Yan, J.-B. Development of a long-period vertical base isolation device with variable stiffness for steel frame structures. Soil Dyn. Earthq. Eng. 2023, 164, 107638. [Google Scholar] [CrossRef]
- GB/T 1972-2005; Disc Spring. Standards Press of China: Beijing, China, 2005.
- GB/T 20688.1-2007; Rubber Bearings-Part 1: Seismic-Protection Isolators Test Methods. Ministry of Housing and Urban-Rural Construction of the People’s Republic of China: Beijing, China, 2007.
- Xing, J.; Huang, H.; Zhang, J.; Yang, Q.S. Mechanical properties of disc springs. J. Vib. Shock 2015, 34, 167–172. [Google Scholar] [CrossRef]
- Zhang, S.; Zhao, S.; Zhu, D.; Liu, H.; Liu, G. Mechanical Property Test and Simulation Analysis of Disc Spring. J. Hunan Univ. Nat. Sci. 2018, 45, 64–73. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Series | fM | fR |
|---|---|---|
| A | 0.005~0.03 | 0.03~0.05 |
| B | 0.003~0.02 | 0.02~0.04 |
| C | 0.002~0.015 | 0.01~0.03 |
| Category | D (mm) | d (mm) | t (mm) | H0 (mm) | Combination Form |
|---|---|---|---|---|---|
| Upper disc spring set | 250 | 127 | 10 | 17 | Double-stacked Triple-paired |
| Lower disc spring set | 250 | 127 | 10 | 17 | Quadruple-stacked Triple-paired |
| Load and Stiffness | F1 (kN) | F3 (kN) | K1 (kN/mm) | K3 (kN/mm) |
|---|---|---|---|---|
| Theoretical results | 346.03 | 712.36 | 11.09 | 33.92 |
| Test results | 363.92 | 764.15 | 11.66 | 37.06 |
| Relative errors (%) | 4.92 | 6.78 | 4.89 | 8.47 |
| Preloading Displacement with Loading Amplitude (mm) | Ke (kN/mm) | Fmax (kN) | Fmin (kN) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Theo. V. | Exptl. V. | Rel Err. (%) | Theo. V. | Exptl. V. | Rel Err. (%) | Theo. V. | Exptl. V. | Rel Err (%) | |
| 16 ± 1 | 25.06 | 24.26 | 3.30 | 188.54 | 187.35 | 0.64 | 138.42 | 138.53 | 0.08 |
| 16 ± 2 | 17.61 | 18.16 | 3.03 | 199.63 | 199.96 | 0.17 | 126.19 | 126.97 | 0.61 |
| 16 ± 4 | 13.88 | 14.02 | 1.00 | 221.81 | 220.86 | 0.43 | 110.73 | 108.18 | 2.36 |
| 16 ± 6 | 12.64 | 12.63 | 0.08 | 244.00 | 235.91 | 3.43 | 92.28 | 89.20 | 3.45 |
| 23 ± 1 | 31.58 | 30.07 | 5.02 | 266.18 | 264.43 | 0.66 | 203.02 | 204.02 | 0.49 |
| 23 ± 2 | 20.87 | 20.53 | 1.66 | 277.27 | 276.59 | 0.25 | 193.79 | 194.07 | 0.14 |
| 23 ± 4 | 15.51 | 15.89 | 2.39 | 299.45 | 302.77 | 1.10 | 175.34 | 175.18 | 0.09 |
| 23 ± 6 | 13.73 | 14.01 | 2.00 | 321.63 | 328.16 | 1.99 | 156.88 | 159.44 | 1.61 |
| 30 ± 1 | 38.10 | 52.42 | 27.32 | 343.81 | 370.21 | 7.13 | 267.62 | 264.68 | 1.11 |
| 30 ± 2 | 28.69 | 36.62 | 21.66 | 373.17 | 398.64 | 6.39 | 258.39 | 251.45 | 2.76 |
| 30 ± 4 | 25.13 | 27.48 | 8.55 | 441.00 | 455.78 | 3.24 | 239.93 | 235.10 | 2.05 |
| 30 ± 6 | 23.95 | 24.53 | 2.36 | 508.84 | 513.61 | 0.93 | 221.48 | 221.48 | 0 |
| Preloading Displacement (mm) | Loading Amplitude (mm) | |||
|---|---|---|---|---|
| 1 | 2 | 4 | 6 | |
| 16 | 24.26 | 18.16 | 14.02 | 12.63 |
| 23 | 30.07 | 20.53 | 15.89 | 14.01 |
| 30 | 52.42 | 36.62 | 27.48 | 24.53 |
| Preloading Displacement (mm) | Loading Amplitude (mm) | |||
|---|---|---|---|---|
| 1 | 2 | 4 | 6 | |
| 16 | 20.88 | 17.57 | 14.31 | 11.12 |
| 23 | 23.96 | 21.63 | 16.35 | 14.36 |
| 30 | 15.52 | 18.75 | 18.53 | 14.83 |
| Preloading Dis-Placement with Loading Amplitude (mm) | Simulated Values (kN/mm) | Experimental Value (kN/mm) | Relative Error (%) |
|---|---|---|---|
| 16 ± 1 | 24.49 | 24.26 | 0.94 |
| 16 ± 2 | 17.62 | 18.16 | 2.97 |
| 16 ± 4 | 13.51 | 14.02 | 3.63 |
| 16 ± 6 | 11.93 | 12.63 | 5.54 |
| 23 ± 1 | 27.86 | 30.07 | 7.34 |
| 23 ± 2 | 18.60 | 20.53 | 9.40 |
| 23 ± 4 | 13.77 | 15.89 | 13.34 |
| 23 ± 6 | 13.14 | 14.01 | 6.21 |
| 30 ± 1 | 54.75 | 52.42 | 4.44 |
| 30 ± 2 | 36.84 | 36.62 | 0.60 |
| 30 ± 4 | 26.46 | 27.48 | 3.71 |
| 30 ± 6 | 23.15 | 24.53 | 5.62 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Xiao, J.-C.; Liu, C.; Zhang, H.-M.; Ma, K.-J. The Performance Study of a Novel Vertical Variable Stiffness Disc Spring Seismic Isolation Bearing. Appl. Sci. 2025, 15, 3380. https://doi.org/10.3390/app15063380
Liu Y, Xiao J-C, Liu C, Zhang H-M, Ma K-J. The Performance Study of a Novel Vertical Variable Stiffness Disc Spring Seismic Isolation Bearing. Applied Sciences. 2025; 15(6):3380. https://doi.org/10.3390/app15063380
Chicago/Turabian StyleLiu, Yuan, Jian-Chun Xiao, Cong Liu, Han-Ming Zhang, and Ke-Jian Ma. 2025. "The Performance Study of a Novel Vertical Variable Stiffness Disc Spring Seismic Isolation Bearing" Applied Sciences 15, no. 6: 3380. https://doi.org/10.3390/app15063380
APA StyleLiu, Y., Xiao, J.-C., Liu, C., Zhang, H.-M., & Ma, K.-J. (2025). The Performance Study of a Novel Vertical Variable Stiffness Disc Spring Seismic Isolation Bearing. Applied Sciences, 15(6), 3380. https://doi.org/10.3390/app15063380