Capturing Mental Workload Through Physiological Sensors in Human–Robot Collaboration: A Systematic Literature Review

 ,
,  ,
,  ,
,  and
and 
Abstract
Featured Application
Abstract
1. Introduction
- RQ1: What industrial tasks are employed to assess mental workload in HRC scenarios?
- RQ2: How are subjective and performance-based measures integrated with physiological data to assess mental workload in HRC?
- RQ3: What are the main physiological measures used to operationalize mental workload in HRC scenarios?
- RQ4: What are the challenges and limitations associated with using physiological measures to assess mental workload in HRC?
2. Materials and Methods
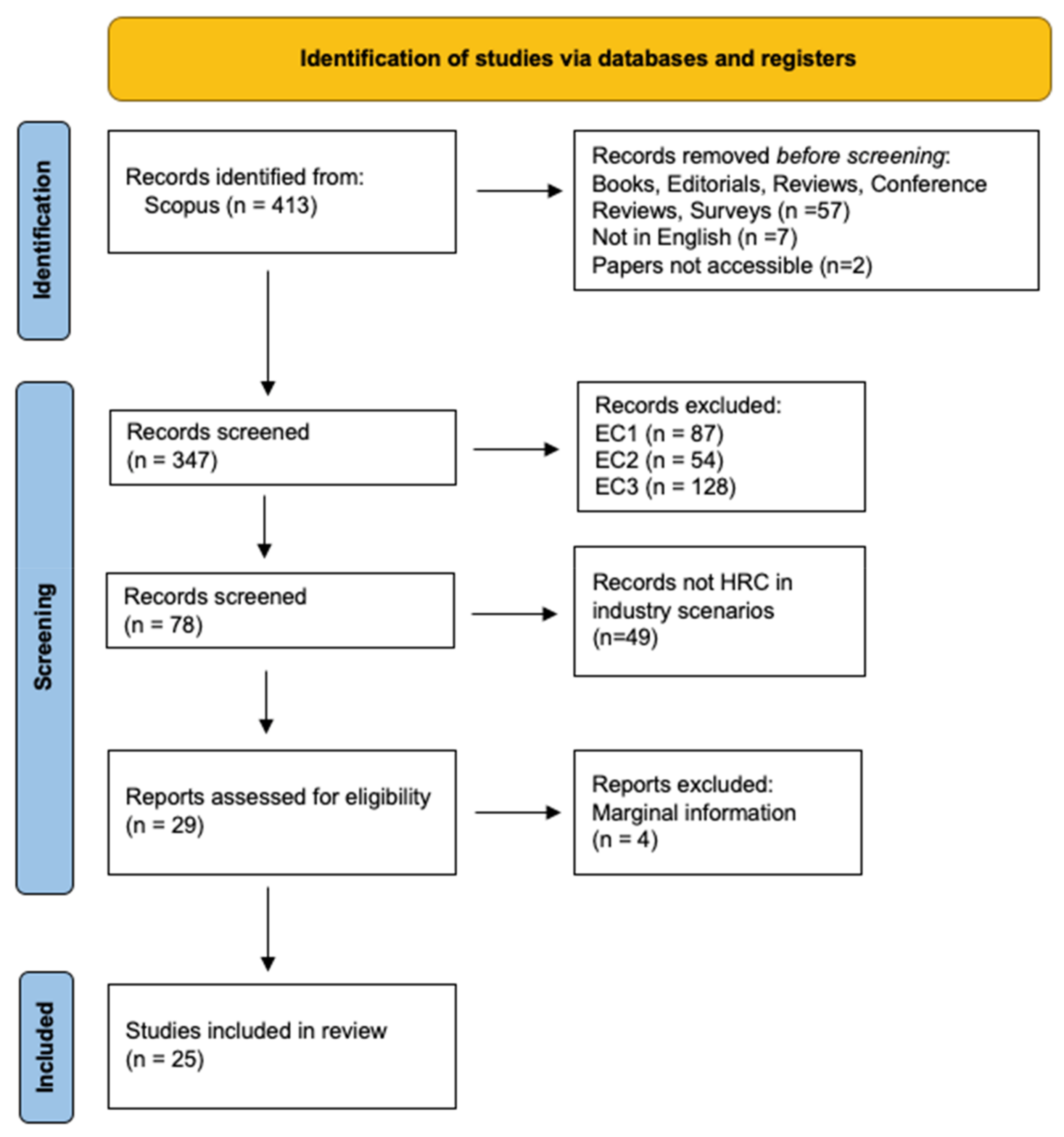
2.1. Literature Search Strategy and Article Selection
- Subject 1—HRC: Keywords: “collaborative robot*” OR cobot* OR “human robot collaboration” OR “human robot interaction”;
- Subject 2—Cognitive ergonomics: Keywords: “mental workload” OR cognitive OR “mental fatigue” OR “mental effort”;
- Subject 3—signal* OR biosignal* OR physiol* OR psychophysiol* OR “brain activity” OR eda OR “electrodermal activity” OR gsr OR “galvanic skin response” OR ecg OR electrocardiogra* OR ppg OR photoplethysmogra* OR fnirs OR “functional near-infrared spectroscopy” OR eeg OR electroencephalogra* OR respiratory OR “body temperature”.
2.2. Eligibility Criteria
3. Results
3.1. Main Findings
3.2. Characteristics of the Selected Studies
3.3. Operationalizing Mental Workload
3.4. Performance Assessment of Mental Workload
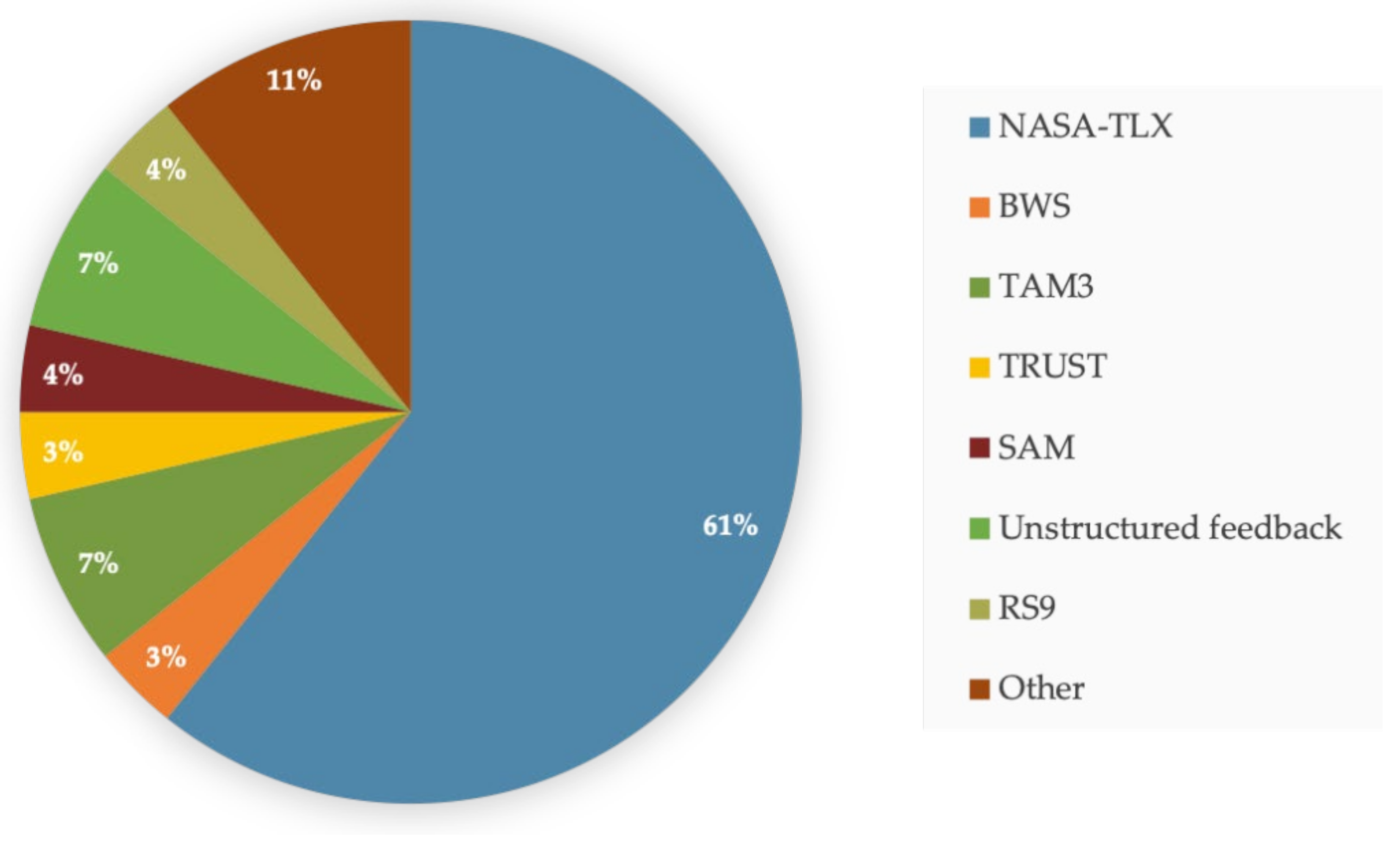
3.5. Subjective Assessment of Mental Workload
3.6. Physiological Assessment of Mental Workload
3.6.1. Central Nervous Measures
Electroencephalogram
Functional Near-Infrared Spectroscopy
3.6.2. Cardiac Measures
3.6.3. Ocular Measures
3.6.4. Electrodermal Activity
3.6.5. Temperature
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ACC | Accelerometry |
| AOI | Area of Interest |
| BDM | Body Discomfort Map |
| BWS | Bedford Workload Scale |
| CP | Conference Paper |
| DFA | Detrended Fluctuation Analysis |
| DNN | Deep Neural Network |
| ECG | Electrocardiogram |
| EDA | Electrodermal Activity |
| EEG | Electroencephalogram |
| ERP | Error-Related Potential |
| fNIRS | Functional Near-Infrared Spectroscopy |
| GB | Gradient Boost |
| HF | High-Frequency |
| HRC | Human–Robot Collaboration |
| HRI | Human–Robot Interaction |
| HRVTi | Heart Rate Variability Time Index |
| HRV | Heart Rate Variability |
| IBI | Interbeat Interval |
| ISO | International Organization for Standardization |
| JP | Journal Paper |
| KNN | K-nearest Neighbors |
| LF | Low-Frequency |
| MWL | Mental Workload |
| NARS | Negative Attitude Towards Robots Survey |
| NASA-TLX | National Aeronautics and Space Administration Task Load Index |
| NN | Normal-to-Normal Intervals |
| OM | Ocular Measures |
| Pe | Error Positivity |
| PEN | Prediction Error Negativity |
| PNN50 | Proportion of Beats with a Successive R-R Interval Difference Exceeding 50 ms |
| PPG | Photoplethysmogram |
| PRISMA | Preferred Reporting Items for Systematic Reviews and Meta-Analyses |
| PROSPERO | International Prospective Register of Systematic Reviews |
| RAS | Robot Anxiety Survey |
| RMSSD | Root Mean Square of the Successive R-R Interval Differences |
| SaEn | Sample Entropy |
| SAM | Self-Assessment Manikin |
| SCL | Skin Conductance Level |
| SCR | Skin Conductance Response |
| SDNN | Standard Deviation of all Successive Normal R-R Intervals |
| SIMKAP | Simultaneous Capacity Multitasking |
| SMI | Sympathetic Modulation Index |
| SPO2 | Peripheral Oxygen Saturation |
| SVI | Sympathovagal Balance Index |
| SVM | Support Vector Machines |
| TAM3 | Technology Acceptance Model |
| ULF | Ultra-Low-Frequency |
| VLF | Very-Low-Frequency |
| VMI | Vagal Modulation Index |
| XAI | Explainable Artificial Intelligence |
References
- Askarpour, M.; Mandrioli, D.; Rossi, M.; Vicentini, F. Formal Model of Human Erroneous Behavior for Safety Analysis in Collaborative Robotics. Robot. Comput. Integr. Manuf. 2019, 57, 465–476. [Google Scholar] [CrossRef]
- Madonna, M.; Monica, L.; Anastasi, S.; Di Nardo, M. Evolution of Cognitive Demand in the Human–Machine Interaction Integrated with Industry 4.0 Technologies. In WIT Transactions on the Built Environment; WIT Press: Southampton, UK, 2019; Volume 189, pp. 13–19. [Google Scholar]
- Kumar, S.; Savur, C.; Sahin, F. Survey of Human-Robot Collaboration in Industrial Settings: Awareness, Intelligence, and Compliance. IEEE Trans. Syst. Man. Cybern. Syst. 2021, 51, 280–297. [Google Scholar] [CrossRef]
- Gervasi, R.; Capponi, M.; Mastrogiacomo, L.; Franceschini, F. Manual Assembly and Human–Robot Collaboration in Repetitive Assembly Processes: A Structured Comparison Based on Human-Centered Performances. Int. J. Adv. Manuf. Technol. 2023, 126, 1213–1231. [Google Scholar] [CrossRef]
- Story, M.; Webb, P.; Fletcher, S.R.; Tang, G.; Jaksic, C.; Carberry, J. Do Speed and Proximity Affect Human-Robot Collaboration with an Industrial Robot Arm? Int. J. Soc. Robot. 2022, 14, 1087–1102. [Google Scholar] [CrossRef]
- ISO 10218-2:2011; Robots and Robotic Devices—Safety Requirements for Industrial Robots—Part 2: Robot Systems and Integration. ISO: Geneva, Switzerland, 2011.
- ISO/TS15066:2016; Robots and Robotic Devices—Collaborative Robots. ISO: Geneva, Switzerland, 2016.
- Gervasi, R.; Capponi, M.; Mastrogiacomo, L.; Franceschini, F. Analyzing Psychophysical State and Cognitive Performance in Human-Robot Collaboration for Repetitive Assembly Processes. Prod. Eng. 2024, 18, 19–33. [Google Scholar] [CrossRef]
- Longo, L.; Wickens, C.D.; Hancock, P.A.; Hancock, G.M. Human Mental Workload: A Survey and a Novel Inclusive Definition. Front. Psychol. 2022, 13, 883321. [Google Scholar] [CrossRef]
- Pereira, E.; Costa, S.; Costa, N.; Arezes, P. Wellness in Cognitive Workload—A Conceptual Framework. In Advances in Neuroergonomics and Cognitive Engineering; Spring: Berlin/Heidelberg, Germany, 2019; pp. 353–364. ISBN 978-3-319-94865-2. [Google Scholar]
- Coughlin, J.F.; Reimer, B.; Mehler, B. Driver Wellness, Safety & the Development of an Awarecar; Massachusetts Institute of Technology: Cambridge, MA, USA, 2009; pp. 1–15. [Google Scholar]
- Gervasi, R.; Capponi, M.; Antonelli, D.; Mastrogiacomo, L.; Franceschini, F. A Human-Centered Perspective in Repetitive Assembly Processes: Preliminary Investigation of Cognitive Support of Collaborative Robots. Procedia Comput. Sci. 2024, 232, 2249–2258. [Google Scholar] [CrossRef]
- McKendrick, R.; Feest, B.; Harwood, A.; Falcone, B. Theories and Methods for Labeling Cognitive Workload: Classification and Transfer Learning. Front. Hum. Neurosci. 2019, 13, 295. [Google Scholar] [CrossRef]
- ISO 10075-3:2004; Ergonomic Principles Related to Mental Workload Part 3: Principles and Requirements Concerning Methods for Measuring and Assessing Mental Workload. ISO: Geneva, Switzerland, 2004.
- Hart, S.G.; Staveland, L.E. Development of NASA-TLX (Task Load Index): Results of Empirical and Theoretical Research. In Human Mental Workload; Hancock, P.A., Meshkati, N., Eds.; Advances in Psychology; Elsevier: Amsterdam, The Netherlands, 1988; Volume 52, pp. 139–183. [Google Scholar]
- Filho, P.C.A.; da Silva, L.; Pombeiro, A.; Costa, N.; Carneiro, P.; Arezes, P. Assessing Mental Workload in Industrial Environments: A Review of Applied Studies. Stud. Syst. Decis. Control 2024, 492, 677–689. [Google Scholar] [CrossRef]
- Costa, N.; Costa, S.; Pereira, E.; Arezes, P. Workload Measures—Recent Trends in the Driving Context. In Studies in Systems, Decision and Control; Spring: Berlin/Heidelberg, Germany, 2019; pp. 419–430. ISBN 978-3-658-25495-7. [Google Scholar]
- Muñoz, J.E.; Pereira, F.; Karapanos, E. Workload Management through Glanceable Feedback: The Role of Heart Rate Variability. In Proceedings of the 2016 IEEE 18th International Conference on e-Health Networking, Applications and Services, Healthcom 2016, Munich, Germany, 14–17 September 2016. [Google Scholar]
- Landi, C.T.; Villani, V.; Ferraguti, F.; Sabattini, L.; Secchi, C.; Fantuzzi, C. Relieving Operators’ Workload: Towards Affective Robotics in Industrial Scenarios. Mechatronics 2018, 54, 144–154. [Google Scholar] [CrossRef]
- Lagomarsino, M.; Lorenzini, M.; Balatti, P.; De Momi, E.; Ajoudani, A. Pick the Right Co-Worker: Online Assessment of Cognitive Ergonomics in Human-Robot Collaborative Assembly. IEEE Trans. Cogn. Dev. Syst. 2022, 15, 1928–1937. [Google Scholar] [CrossRef]
- Mao, X.; Li, M.; Li, W.; Niu, L.; Xian, B.; Zeng, M.; Chen, G. Progress in EEG-Based Brain Robot Interaction Systems. Comput. Intell. Neurosci. 2017, 2017, 1742862. [Google Scholar] [CrossRef]
- Panchetti, T.; Pietrantoni, L.; Puzzo, G.; Gualtieri, L.; Fraboni, F. Assessing the Relationship between Cognitive Workload, Workstation Design, User Acceptance and Trust in Collaborative Robots. Appl. Sci. 2023, 13, 1720. [Google Scholar] [CrossRef]
- Nenna, F.; Orso, V.; Zanardi, D.; Gamberini, L. The Virtualization of Human–Robot Interactions: A User-Centric Workload Assessment. Virtual Real. 2023, 27, 553–571. [Google Scholar] [CrossRef]
- Rajavenkatanarayanan, A.; Nambiappan, H.R.; Kyrarini, M.; Makedon, F. Towards a Real-Time Cognitive Load Assessment System for Industrial Human-Robot Cooperation. In Proceedings of the 2020 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), Naples, Italy, 31 August–4 September 2020; pp. 698–705. [Google Scholar]
- Buerkle, A.; Matharu, H.; Al-Yacoub, A.; Lohse, N.; Bamber, T.; Ferreira, P. An Adaptive Human Sensor Framework for Human–Robot Collaboration. Int. J. Adv. Manuf. Technol. 2022, 119, 1233–1248. [Google Scholar] [CrossRef]
- Bettoni, A.; Montini, E.; Righi, M.; Villani, V.; Tsvetanov, R.; Borgia, S.; Secchi, C.; Carpanzano, E. Mutualistic and Adaptive Human-Machine Collaboration Based on Machine Learning in an Injection Moulding Manufacturing Line. Procedia CIRP 2020, 93, 395–400. [Google Scholar]
- Tao, D.; Tan, H.; Wang, H.; Zhang, X.; Qu, X.; Zhang, T. A Systematic Review of Physiological Measures of Mental Workload. Int. J. Environ. Res. Public Health 2019, 16, 2716. [Google Scholar] [CrossRef]
- Lohani, M.; Payne, B.R.; Strayer, D.L. A Review of Psychophysiological Measures to Assess Cognitive States in Real-World Driving. Front. Hum. Neurosci. 2019, 13, 57. [Google Scholar] [CrossRef]
- Charles, R.L.; Nixon, J. Measuring Mental Workload Using Physiological Measures: A Systematic Review. Appl. Ergon. 2019, 74, 221–232. [Google Scholar] [CrossRef]
- Page, M.J.; McKenzie, J.E.; Bossuyt, P.M.; Boutron, I.; Hoffmann, T.C.; Mulrow, C.D.; Shamseer, L.; Tetzlaff, J.M.; Akl, E.A.; Brennan, S.E.; et al. The PRISMA 2020 Statement: An Updated Guideline for Reporting Systematic Reviews. BMJ 2021, 372, n71. [Google Scholar]
- McHugh, M.L. Interrater Reliability: The Kappa Statistic. Biochem. Med. 2012, 22, 276–282. [Google Scholar] [CrossRef]
- Liu, Y.; Habibnezhad, M.; Jebelli, H. Brainwave-Driven Human-Robot Collaboration in Construction. Autom. Constr. 2021, 124, 103556. [Google Scholar] [CrossRef]
- Liu, Y.; Habibnezhad, M.; Jebelli, H.; Monga, V. Worker-in-the-Loop Cyber-Physical System for Safe Human-Robot Collaboration in Construction. In Proceedings of the Computing in Civil Engineering 2021—Selected Papers from the ASCE International Conference on Computing in Civil Engineering 2021, Orlando, FL, USA, 12–14 September 2021; American Society of Civil Engineers (ASCE): Reston, VA, USA, 2021; pp. 1075–1083. [Google Scholar]
- Lin, C.J.; Lukodono, R.P. Classification of Mental Workload in Human-Robot Collaboration Using Machine Learning Based on Physiological Feedback. J. Manuf. Syst. 2022, 65, 673–685. [Google Scholar] [CrossRef]
- Liu, Y.; Jebelli, H. Worker-Aware Robotic Motion Planner in Construction for Improved Psychological Well- Being during Worker-Robot Interaction. In Construction Research Congress 2022: Computer Applications, Automation, and Data Analytics—Selected Papers from Construction Research Congress 2022; American Society of Civil Engineers (ASCE): Reston, VA, USA, 2022; Volume 2-B, pp. 205–214. [Google Scholar]
- Savković, M.; Caiazzo, C.; Djapan, M.; Vukićević, A.M.; Pušica, M.; Mačužić, I. Development of Modular and Adaptive Laboratory Set-Up for Neuroergonomic and Human-Robot Interaction Research. Front. Neurorobot. 2022, 16, 863637. [Google Scholar] [CrossRef]
- Afzal, M.A.; Gu, Z.; Afzal, B.; Bukhari, S.U. Cognitive Workload Classification in Industry 5.0 Applications: Electroencephalography-Based Bi-Directional Gated Network Approach. Electronics 2023, 12, 4008. [Google Scholar] [CrossRef]
- Caiazzo, C.; Savkovic, M.; Pusica, M.; Milojevic, D.; Leva, M.C.; Djapan, M. Development of a Neuroergonomic Assessment for the Evaluation of Mental Workload in an Industrial Human–Robot Interaction Assembly Task: A Comparative Case Study. Machines 2023, 11, 995. [Google Scholar] [CrossRef]
- Liu, Y.; Ojha, A.; Shayesteh, S.; Jebelli, H.; Lee, S. Human-Centric Robotic Manipulation in Construction: Generative Adversarial Networks Based Physiological Computing Mechanism to Enable Robots to Perceive Workers’ Cognitive Load. Can. J. Civ. Eng. 2023, 50, 224–238. [Google Scholar] [CrossRef]
- Pluchino, P.; Pernice, G.F.A.; Nenna, F.; Mingardi, M.; Bettelli, A.; Bacchin, D.; Spagnolli, A.; Jacucci, G.; Ragazzon, A.; Miglioranzi, L.; et al. Advanced Workstations and Collaborative Robots: Exploiting Eye-Tracking and Cardiac Activity Indices to Unveil Senior Workers’ Mental Workload in Assembly Tasks. Front. Robot. AI 2023, 10, 1275572. [Google Scholar] [CrossRef]
- Stanković, E.; Kljajić, J.; Šumarać, J.; Radmilović, M. Human Motion Behavior Evaluation: The Possibility of Improving Human-Robot Collaboration. In Proceedings of the 10th International Conference on Electrical, Electronic and Computing Engineering, IcETRAN 2023, East Sarajevo, RS, Bosnia and Herzegovina, 5–8 June 2023; Institute of Electrical and Electronics Engineers Inc.: New York, NY, USA, 2023. [Google Scholar]
- Zakeri, Z.; Arif, A.; Omurtag, A.; Breedon, P.; Khalid, A. Multimodal Assessment of Cognitive Workload Using Neural, Subjective and Behavioural Measures in Smart Factory Settings. Sensors 2023, 23, 8926. [Google Scholar] [CrossRef]
- Capponi, M.; Gervasi, R.; Mastrogiacomo, L.; Franceschini, F. Assembly Complexity and Physiological Response in Human-Robot Collaboration: Insights from a Preliminary Experimental Analysis. Robot Comput. Integr. Manuf. 2024, 89, 102789. [Google Scholar] [CrossRef]
- Chen, S.-Y.; Chen, J.-H.; Yang, B.-S. Investigating Human Mental Workload During Human Robot Interaction. In Proceedings of the 2024 19th International Microsystems, Packaging, Assembly and Circuits Technology Conference (IMPACT), Taipei, Taiwan, 22–25 October 2024; IEEE: New York, NY, USA, 2024; pp. 311–314. [Google Scholar]
- Gervasi, R.; Capponi, M.; Mastrogiacomo, L.; Franceschini, F. Eye-Tracking Support for Analyzing Human Factors in Human-Robot Collaboration during Repetitive Long-Duration Assembly Processes. Prod. Eng. 2024, 19, 47–64. [Google Scholar] [CrossRef]
- John, A.R.; Singh, A.K.; Gramann, K.; Liu, D.; Lin, C.T. Prediction of Cognitive Conflict during Unexpected Robot Behavior under Different Mental Workload Conditions in a Physical Human-Robot Collaboration. J. Neural Eng. 2024, 21, 026010. [Google Scholar] [CrossRef] [PubMed]
- Kneževic, N.; Savić, A.; Gordić, Z.; Ajoudani, A.; Jovanović, K. Toward Industry 5.0: A Neuroergonomic Workstation for a Human-Centered, Collaborative Robot-Supported Manual Assembly Process. IEEE Robot. Autom. Mag. 2024, 2–13. [Google Scholar] [CrossRef]
- Korivand, S.; Galvani, G.; Ajoudani, A.; Gong, J.; Jalili, N. Optimizing Human–Robot Teaming Performance through Q-Learning-Based Task Load Adjustment and Physiological Data Analysis. Sensors 2024, 24, 2817. [Google Scholar] [CrossRef] [PubMed]
- Packy, A.L.; Jayahankar, J.; Teymourlouei, A.; Stone, J.; Oh, H.; Katz, G.E.; Reggia, J.A.; Gentili, R.J. Neurocognitive Assessment under Various Human-Robot Teaming Environments. In Proceedings of the 2024 46th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, FL, USA, 15–19 July 2024; IEEE: New York, NY, USA, 2024; pp. 1–4. [Google Scholar]
- Roesler, E.; Meerwein, J.; Krueger, J.; Onnasch, L. Beyond the Default: The Effects of Adaptable Robot Speed in Industrial Human-Robot Interaction. In Proceedings of the Companion of the 2024 ACM/IEEE International Conference on Human-Robot Interaction, Boulder, CO, USA, 11–15 March 2024; ACM: New York, NY, USA, 2024; pp. 896–900. [Google Scholar]
- Segura, P.; Lobato-Calleros, O.; Soria-Arguello, I.; Hernández-Martínez, E.G. Work Roles in Human–Robot Collaborative Systems: Effects on Cognitive Ergonomics for the Manufacturing Industry. Appl. Sci. 2025, 15, 744. [Google Scholar] [CrossRef]
- Yerebakan, M.O.; Gu, Y.; Gross, J.; Hu, B. Evaluation of Biomechanical and Mental Workload During Human–Robot Collaborative Pollination Task. Hum. Factors J. Hum. Factors Ergon. Soc. 2025, 67, 100–114. [Google Scholar] [CrossRef]
- van Eck, N.J.; Waltman, L. VOSviewer Manual Version 1.6.16; Univeristeit Leiden: Leiden, The Netherlands, 2020. [Google Scholar]
- Iarlori, S.; Perpetuini, D.; Tritto, M.; Cardone, D.; Tiberio, A.; Chinthakindi, M.; Filippini, C.; Cavanini, L.; Freddi, A.; Ferracuti, F.; et al. An Overview of Approaches and Methods for the Cognitive Workload Estimation in Human–Machine Interaction Scenarios through Wearables Sensors. BioMedInformatics 2024, 4, 1155–1173. [Google Scholar] [CrossRef]
- Jebelli, H.; Hwang, S.; Lee, S. EEG Signal-Processing Framework to Obtain High-Quality Brain Waves from an Off-the-Shelf Wearable EEG Device. J. Comput. Civ. Eng. 2018, 32, 04017070. [Google Scholar] [CrossRef]
- Yang, J.; Barragan, J.A.; Farrow, J.M.; Sundaram, C.P.; Wachs, J.P.; Yu, D. An Adaptive Human-Robotic Interaction Architecture for Augmenting Surgery Performance Using Real-Time Workload Sensing—Demonstration of a Semi-Autonomous Suction Tool. Hum. Factors 2022, 66, 1081–1102. [Google Scholar] [CrossRef]
- Betts, K.; Reddy, P.; Galoyan, T.; Delaney, B.; McEachron, D.L.; Izzetoglu, K.; Shewokis, P.A. An Examination of the Effects of Virtual Reality Training on Spatial Visualization and Transfer of Learning. Brain Sci. 2023, 13, 890. [Google Scholar] [CrossRef]
- Strait, M.; Scheutz, M. What We Can and Cannot (yet) Do with Functional near Infrared Spectroscopy. Front. Neurosci. 2014, 8, 117. [Google Scholar] [CrossRef]
- Cao, J.; Garro, E.M.; Zhao, Y. EEG/FNIRS Based Workload Classification Using Functional Brain Connectivity and Machine Learning. Sensors 2022, 22, 7623. [Google Scholar] [CrossRef]
- Park, J.H. Mental Workload Classification Using Convolutional Neural Networks Based on FNIRS-Derived Prefrontal Activity. BMC Neurol. 2023, 23, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Aghajani, H.; Garbey, M.; Omurtag, A. Measuring Mental Workload with EEG+fNIRS. Front. Hum. Neurosci. 2017, 11, 359. [Google Scholar] [CrossRef] [PubMed]
- Shao, S.; Wang, T.; Wang, Y.; Su, Y.; Song, C.; Yao, C. Research of Hrv as a Measure of Mental Workload in Human and Dual-Arm Robot Interaction. Electronics 2020, 9, 2174. [Google Scholar] [CrossRef]
- Shaffer, F.; Ginsberg, J.P. An Overview of Heart Rate Variability Metrics and Norms. Front. Public Health 2017, 5, 258. [Google Scholar] [CrossRef]
- Memar, A.H.; Esfahani, E.T. Human Performance in a Mixed Human-Robot Team: Design of a Collaborative Framework. In Proceedings of the ASME Design Engineering Technical Conference, Charlotte, NC, USA, 21–24 August 2016; American Society of Mechanical Engineers (ASME): New York, NY, USA, 2016; Volume 1B-2016. [Google Scholar]
- Ghaderyan, P.; Abbasi, A. An Efficient Automatic Workload Estimation Method Based on Electrodermal Activity Using Pattern Classifier Combinations. Int. J. Psychophysiol. 2016, 110, 91–101. [Google Scholar] [CrossRef]
- Saha, S.; Jindal, K.; Shakti, D.; Tewary, S.; Sardana, V. Chirplet Transform-Based Machine-Learning Approach towards Classification of Cognitive State Change Using Galvanic Skin Response and Photoplethysmography Signals. Expert Syst. 2022, 39, e12958. [Google Scholar] [CrossRef]
- Posada-Quintero, H.F.; Chon, K.H. Innovations in Electrodermal Activity Data Collection and Signal Processing: A Systematic Review. Sensors 2020, 20, 479. [Google Scholar] [CrossRef]
- Han, S.Y.; Kwak, N.S.; Oh, T.; Lee, S.W. Classification of Pilots’ Mental States Using a Multimodal Deep Learning Network. Biocybern. Biomed. Eng. 2020, 40, 324–336. [Google Scholar] [CrossRef]
- Anusha, A.S.; Jose, J.; Preejith, S.P.; Jayaraj, J.; Mohanasankar, S. Physiological Signal Based Work Stress Detection Using Unobtrusive Sensors. Biomed. Phys. Eng. Express 2018, 4, 065001. [Google Scholar] [CrossRef]
- Jimenez-Molina, A.; Retamal, C.; Lira, H. Using Psychophysiological Sensors to Assess Mental Workload during Web Browsing. Sensors 2018, 18, 458. [Google Scholar] [CrossRef]
- DellrAgnola, F.; Jao, P.-K.; Arza, A.; Chavarriaga, R.; Millan, J.d.R.; Floreano, D.; Atienza, D. Machine-Learning Based Monitoring of Cognitive Workload in Rescue Missions with Drones. IEEE J. Biomed. Health Inform. 2022, 26, 4751–4762. [Google Scholar] [CrossRef] [PubMed]
- Androutsou, T.; Angelopoulos, S.; Hristoforou, E.; Matsopoulos, G.K.; Koutsouris, D.D. A Multisensor System Embedded in a Computer Mouse for Occupational Stress Detection. Biosensors 2023, 13, 10. [Google Scholar] [CrossRef] [PubMed]
- Ding, Y.; Cao, Y.; Wang, Y. Physiological Indicators of Mental Workload in Visual Display Terminal Work. In Advances in Physical Ergonomics and Human Factors; Springer International Publishing: Berlin/Heidelberg, Germany, 2020; Volume 967, ISBN 9783030201418. [Google Scholar]
- De Waard, D. The Measurement of Drivers’s Mental Workload. Ph.D. Thesis, University of Groningen, Traffic Research Centre, Groningen, The Netherlands, 1996. [Google Scholar]
- Kim, H.; Miyakoshi, M.; Kim, Y.; Stapornchaisit, S.; Yoshimura, N.; Koike, Y. Electroencephalography Reflects User Satisfaction in Controlling Robot Hand through Electromyographic Signals. Sensors 2023, 23, 277. [Google Scholar] [CrossRef] [PubMed]
- Hopko, S.K.; Khurana, R.; Mehta, R.K.; Pagilla, P.R. Effect of Cognitive Fatigue, Operator Sex, and Robot Assistance on Task Performance Metrics, Workload, and Situation Awareness in Human-Robot Collaboration. IEEE Robot. Autom. Lett. 2021, 6, 3049–3056. [Google Scholar] [CrossRef]
- Shayesteh, S.; Ojha, A.; Liu, Y.; Jebelli, H. Human-Robot Teaming in Construction: Evaluative Safety Training through the Integration of Immersive Technologies and Wearable Physiological Sensing. Saf. Sci. 2023, 159, 106019. [Google Scholar] [CrossRef]
- Gervasi, R.; Aliev, K.; Mastrogiacomo, L.; Franceschini, F. User Experience and Physiological Response in Human-Robot Collaboration: A Preliminary Investigation. J. Intell. Robot. Syst. Theory Appl. 2022, 106, 36. [Google Scholar] [CrossRef]
- Landmann, E. I Can See How You Feel—Methodological Considerations and Handling of Noldus’s FaceReader Software for Emotion Measurement. Technol. Forecast Soc. Change 2023, 197, 122889. [Google Scholar] [CrossRef]
- Zhou, Y.; Xu, Z.; Niu, Y.; Wang, P.; Wen, X.; Wu, X.; Zhang, D. Cross-Task Cognitive Workload Recognition Based on EEG and Domain Adaptation. IEEE Trans. Neural Syst. Rehabil. Eng. 2022, 30, 50–60. [Google Scholar] [CrossRef]
- Ali, S.; Abuhmed, T.; El-Sappagh, S.; Muhammad, K.; Alonso-Moral, J.M.; Confalonieri, R.; Guidotti, R.; Del Ser, J.; Díaz-Rodríguez, N.; Herrera, F. Explainable Artificial Intelligence (XAI): What We Know and What Is Left to Attain Trustworthy Artificial Intelligence. Inf. Fusion 2023, 99, 101805. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
| Reference | Publication | Sample Size | Task Category | Workload Measure | Collected Data |
|---|---|---|---|---|---|
| [26] | CP | 4 | Assembly | Performance | Quality checks, quality issues, productivity, operating costs, variability of job, risk of accidents |
| Subjective | NASA-TLX; Borg CR-10; Job engagement | ||||
| Physiological | HR; HRV; EDA | ||||
| [32] | JP | 14 | Construction | Subjective | NASA-TLX; RS9 |
| Physiological | EEG | ||||
| [33] | CP | 6 | Construction | Physiological | EEG |
| [34] | JP | 13 | Assembly | Subjective | NASA-TLX |
| Physiological | Cardiac Measures; EDA; Hand temperature | ||||
| [35] | JP | 13 | Construction | Physiological | EEG |
| [36] | JP | 2 | Assembly | Physiological | EEG; EMG |
| [37] | JP | 48 | SIMKAP | Physiological | EEG |
| [38] | JP | 9 | Assembly | Performance | Number of errors/mistakes |
| Subjective | NASA-TLX | ||||
| Physiological | EEG | ||||
| [4] | JP | 36 | Assembly | Performance | Number of errors/mistakes |
| Subjective | NASA-TLX; SAM; BDM | ||||
| Physiological | HRV (RMSSD); EDA (SCR); | ||||
| [39] | JP | 14 | Construction | Subjective | NASA-TLX |
| Physiological | EEG | ||||
| [40] | JP | 15 | Assembly | Performance | Number of errors/mistakes; time on task |
| Subjective | NASA-TLX; TAM3; Ad hoc acceptance, well-being and working experience; social impact | ||||
| Physiological | OM; HR; video record | ||||
| [41] | CP | 10 | Assembly | Physiological | EEG; EMG |
| [42] | JP | 13 | Pick-and-place | Performance | Number of errors/mistakes; reaction time |
| Subjective | NASA-TLX | ||||
| Physiological | EEG fNIRS (HbO/HbR) | ||||
| [43] | JP | 18 | Assembly | Subjective | Unstructured feedback |
| Physiological | EDA (SCL; SCR); HRV (RMSSD and SDNN); OM | ||||
| [44] | CP | 15 | Material handling | Subjective | NASA-TLX |
| Physiological | fNIRS; EMG | ||||
| [12] | CP | 12 | Assembly | Performance | Number of errors/mistakes |
| Subjective | Unstructured feedback | ||||
| Physiological | EDA (SCR; SCL); HR | ||||
| [8] | JP | 12 | Assembly | Performance | Number of errors/mistakes |
| Physiological | EDA (SCR; SCL); HRV (RMSSD) | ||||
| [45] | JP | 6 | Assembly | Subjective | NASA-TLX; |
| Physiological | OM | ||||
| [46] | JP | 24 | Blasting | Performance | Time-based measures |
| Subjective | NASA-TLX | ||||
| Physiological | EEG (PEN, Pe) | ||||
| [47] | JP | 4 | Assembly | Performance | Number of errors/mistakes; Time-based measures |
| Subjective | NASA-TLX | ||||
| Physiological | EEG | ||||
| [48] | JP | 22 | Inspection | Performance | Number of errors/mistakes |
| Subjective | NASA-TLX | ||||
| Physiological | Cardiac activity; EDA; Temperature; ACC | ||||
| [49] | CP | 11 | Problem-solving | Performance | Number of errors/mistakes |
| Subjective | NASA-TLX; TRUST | ||||
| Physiological | EEG | ||||
| [50] | CP | 43 | Assembly | Performance | Number of errors/mistakes |
| Subjective | NASA-TLX; TAM; Perceived control | ||||
| Physiological | HR | ||||
| [51] | JP | 17 | Inspection | Subjective | NASA-TLX; BWS |
| Physiological | HR | ||||
| [52] | JP | 16 | Agricultural tasks | Subjective | NASA-TLX; NARS; RAS |
| Physiological | OM; Spine kinematics |
| Spectral Power Band | Interpretation | Employed in |
|---|---|---|
| Alpha | Linked to relaxation and idle mental states. Alpha power decreases as cognitive demand increases. | [32,36,42,46,49] |
| Theta | Related to cognitive control, working memory, and sustained attention. Frontal theta power increases with higher cognitive demand. | [36,37,46,49] |
| Betha | Associated with active cognitive processing, stress, and alertness. Beta power increases in response to heightened cognitive load and task complexity. | [32,38] |
| Gamma | Linked to complex cognitive functions, memory processing, and high attentional states. Gamma oscillations correlate with high mental effort and concentration. | [32,37,41] |
| Alpha/Beta | Higher Alpha/Beta ratio = relaxed mind Lower Alpha/Beta ratio = alert state of mind | [37,41] |
| Beta/Alpha | Higher Beta/Alpha ratio = alert state of mind Lower Beta/Alpha ratio = relaxed mind | [38] |
| Alpha/theta | Higher Alpha/Theta = focused and alert state of mind Lower Alpha/Theta = more relaxed and meditative states | [37,41] |
| Theta/Alpha | Higher Theta/Alpha = more relaxed and meditative states Lower Theta/Alpha = focused and alert state of mind | [36,47] |
| Theta-Beta ratio | Associated with working memory and attentional control. | [47] |
| Gamma/Theta | Research has shown that the gamma/theta ratio is higher during states of focused attention, such as when performing a visual or auditory task. The Gamma/Theta ratio has also been linked to memory processing, with higher ratios observed during successful encoding and retrieval of memories. | [37,41] |
| Beta/Alpha + Theta | Reflects mental effort, vigilance, attention, alertness, and task engagement. | [47] |
| Features | Description | Employed in |
|---|---|---|
| NN | Normal-to-normal interval. Also called the R-R interval or the interbeat interval (IBI). Measures the time between QRS peaks. | [8] |
| SDNN | The standard deviation of all NN intervals. | [43] |
| SDANN | The standard deviation of the averages of NN intervals in all 5 min segments of the entire recording. | -- |
| RMSSD | The square root of the mean of the sum of the squares of the differences between adjacent NN intervals. | [4,8,43] |
| pNN50 | Proportion of differences in consecutive NN intervals that are longer than 50 ms. | -- |
| HRVTi | The sum of all R-R intervals divided by the maximum density distribution. | -- |
| Features | Description | Employed in |
|---|---|---|
| Ultra-Low-Frequency (ULF) | Power spectrum ≤ 0.003 Hz | -- |
| Very-Low-Frequency (VLF) | Power spectrum from 0.003–0.04 Hz | -- |
| Low-Frequency (LF) | Power spectrum from 0.04 to 0.15 Hz | [34] |
| High-Frequency (HF) | Power spectrum from 0.15 to 0.4 Hz | [34] |
| Sympathetic Modulation Index (SMI) | SMI = LF/(LF + HF) | -- |
| Vagal Modulation Index (VMI) | VMI = HF/(LF + HF) | -- |
| Symphatovagal Balance Index (SVI) | SVI = LF/HF | [34] |
| Features | Description | Employed in |
|---|---|---|
| Blink rate | Blink frequency per minute or second. Higher blink rates can be associated with higher mental demand or fatigue, while lower blink rates can be associated with higher visual demand or attention. | [40,52] |
| Blink duration | Closure time duration of a blink. Lower blink duration may be associated with higher visual demand, while higher blink duration can be provoked by tiredness or fatigue. | [40] |
| Pupil size | Diameter or area of the pupil. Pupil size in adults can range between 2 mm and 8 mm in diameter. Higher pupil size can be associated with higher mental demand. | [43,45,52] |
| Fixation rate | The number of fixations, usually in a certain area of interest (AOI). The number of fixations approximates visual attention allocation. More fixations can equate to less efficient search or increased visual effort, thus, a higher mental workload. | [40,43,45] |
| Fixation duration | The time spent gazing at a position. A longer fixation duration describes issues related to extracting information (i.e., more processing time), or it indicates that the target is more appealing. | [40,43,45] |
| Saccade rate | The number of saccades, usually in a certain AOI. A higher number of saccades can be associated with higher visual effort and, thus, higher mental workload. | [43,45] |
| Saccade duration | The length of time from the start to the end of a saccade event (i.e., shifting from one fixation to another). | [43] |
| Saccade amplitude | The measure of visual arc degrees of movement from one fixation to the next. Saccade amplitude usually drops as mental workload increases. | [43] |
| Saccade velocity | The speed of the saccade (degrees/time) is usually measured considering the peak velocity. | [43] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pereira, E.; Sigcha, L.; Silva, E.; Sampaio, A.; Costa, N.; Costa, N. Capturing Mental Workload Through Physiological Sensors in Human–Robot Collaboration: A Systematic Literature Review. Appl. Sci. 2025, 15, 3317. https://doi.org/10.3390/app15063317
Pereira E, Sigcha L, Silva E, Sampaio A, Costa N, Costa N. Capturing Mental Workload Through Physiological Sensors in Human–Robot Collaboration: A Systematic Literature Review. Applied Sciences. 2025; 15(6):3317. https://doi.org/10.3390/app15063317
Chicago/Turabian StylePereira, Eduarda, Luis Sigcha, Emanuel Silva, Adriana Sampaio, Nuno Costa, and Nélson Costa. 2025. "Capturing Mental Workload Through Physiological Sensors in Human–Robot Collaboration: A Systematic Literature Review" Applied Sciences 15, no. 6: 3317. https://doi.org/10.3390/app15063317
APA StylePereira, E., Sigcha, L., Silva, E., Sampaio, A., Costa, N., & Costa, N. (2025). Capturing Mental Workload Through Physiological Sensors in Human–Robot Collaboration: A Systematic Literature Review. Applied Sciences, 15(6), 3317. https://doi.org/10.3390/app15063317