
Vehicle Target Tracking Algorithm Based on Improved Strong Tracking Unscented Kalman Filter



Abstract
1. Introduction
- (1)
- Introducing a multidimensional adaptive factor diagonal matrix solves the problem of a single adaptive factor adjustment of strong tracking UKF under multidimensional system variables and realizes the flexible adjustment in a multidimensional state.
- (2)
- Introducing the criterion of discriminating the matching degree between the actual residual covariance and the theoretical residual covariance, which makes up for the lack of practical judgment and adjustment mechanism when the noise statistical characteristics change.
- (3)
- The dynamic adjustment strategy based on UT transform solves the problem of increasing filtering error when the target motion state changes significantly.
2. Related Work
3. Multidimensional Adaptive Factor-Based Strong Tracking UKF Algorithm
3.1. Introduction of Multidimensional Adaptive Decay Factors
3.2. MAST-UKF Algorithm Design
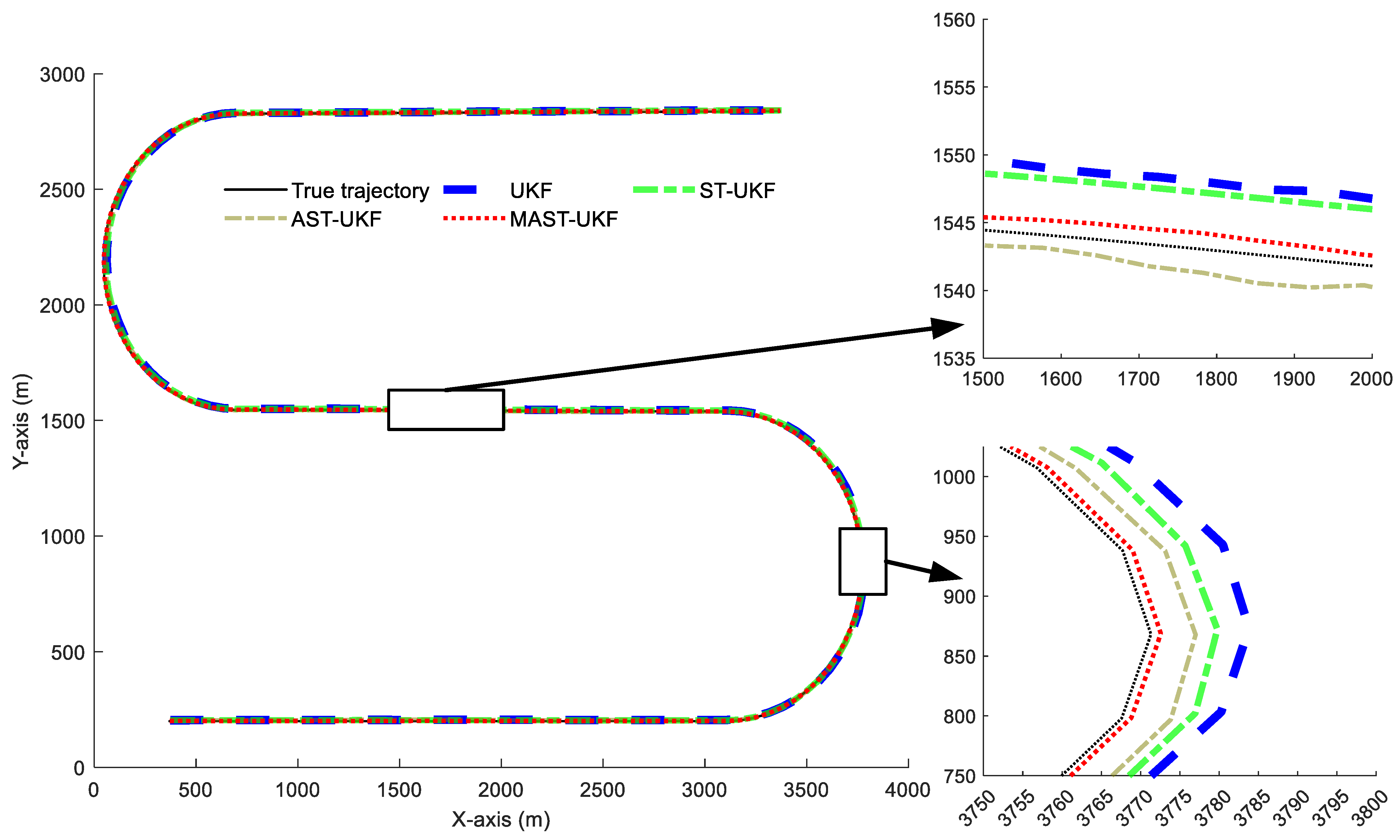
3.3. Simulation Experiments and Analysis
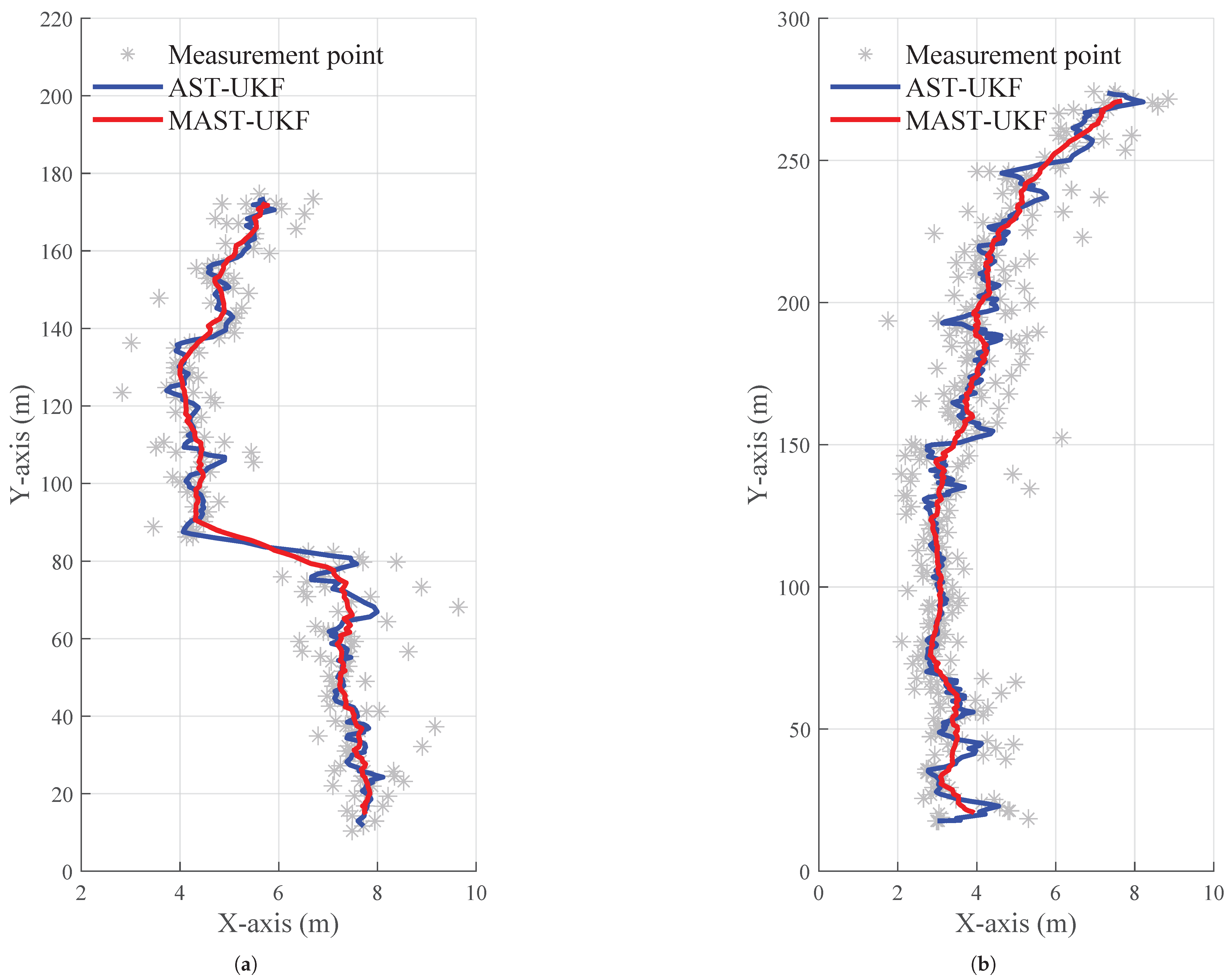
4. Real Experimental Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Huang, K.; Ding, J.; Deng, W. An Overview of Millimeter-Wave Radar Modeling Methods for Autonomous Driving Simulation Applications. Sensors 2024, 24, 3310. [Google Scholar] [CrossRef] [PubMed]
- Tian, F.; Guo, X.; Fu, W. Target Tracking Algorithm Based on Adaptive Strong Tracking Extended Kalman Filter. Electronics 2024, 13, 652. [Google Scholar] [CrossRef]
- Wu, G.; Zhou, F.; Meng, C.; Li, X.Y. Precise UAV MMW-Vision Positioning: A Modal-Oriented Self-Tuning Fusion Framework. IEEE J. Sel. Areas Commun. 2023, 42, 6–20. [Google Scholar] [CrossRef]
- Liu, Z.; Chen, Y.; Lu, Y. Mid-state Kalman filter for nonlinear problems. Sensors 2022, 22, 1302. [Google Scholar] [CrossRef] [PubMed]
- Zong, M.; Zhu, Z.; Wang, H. A simulation method for millimeter-wave radar sensing in traffic intersection based on bidirectional analytical ray-tracing algorithm. IEEE Sens. J. 2023, 23, 14276–14284. [Google Scholar] [CrossRef]
- Liang, L.; Ma, H.; Zhao, L.; Xie, X.; Hua, C.; Zhang, M.; Zhang, Y. Vehicle detection algorithms for autonomous driving: A review. Sensors 2024, 24, 3088. [Google Scholar] [CrossRef] [PubMed]
- Chen, K.; Shao, J.; Zhang, Y.; Liu, K. A Target-based co-calibration framework for 3DRadar-camera using a modified corner reflector. Meas. Sci. Technol. 2024, 35, 047002. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. Unscented filtering and nonlinear estimation. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef]
- Wang, X.X.; Zhao, L.; Xia, Q.X.; Hao, Y. Strong tracking filter based on unscented transformation. Control Decis. 2010, 25, 1063–1068. [Google Scholar]
- Li, P.; Zhou, G. Target Tracking With Revisit Interval Uncertainty for Rotating Radars. IEEE Trans. Aerosp. Electron. Syst. 2024, 60, 7354–7366. [Google Scholar] [CrossRef]
- Dahal, P.; Mentasti, S.; Arrigoni, S.; Braghin, F.; Matteucci, M.; Cheli, F. Extended object tracking in curvilinear road coordinates for autonomous driving. IEEE Trans. Intell. Veh. 2022, 8, 1266–1278. [Google Scholar] [CrossRef]
- Elsergany, A.M.; Abdel-Hafez, M.F.; Jaradat, M.A. Novel augmented quaternion UKF for enhanced loosely coupled GPS/INS integration. IEEE Trans. Control Syst. Technol. 2024, 32, 2321–2331. [Google Scholar] [CrossRef]
- Sun, W.; Zhao, J.; Ding, W.; Sun, P. Robust UKF relative positioning approach for tightly coupled vehicle ad hoc networks based on adaptive M-estimation. IEEE Sens. J. 2023, 23, 9959–9971. [Google Scholar] [CrossRef]
- Wang, P.; Liu, C.; Zhang, J.; Wang, L.; Zhang, M. DS-UKF-Based Positioning Method for Intelligent Connected Vehicles in Urban Intersection Scenarios. IEEE Trans. Intell. Transp. Syst. 2023, 25, 6118–6132. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, X.; Zhang, N.; Gao, Z.; Li, Y. Artificial neural network based on strong track and square root UKF for INS/GNSS intelligence integrated system during GPS outage. Sci. Rep. 2024, 14, 13905. [Google Scholar] [CrossRef] [PubMed]
- Yuan, S.; Wu, J.; Luan, F.; Zhang, L.; Lv, J. Improvement of Strong Tracking UKF-SLAM Approach using Three-position Ultrasonic Detection. Robot. Auton. Syst. 2023, 159, 104305. [Google Scholar] [CrossRef]
- Zhao, G.; Jiang, Z.; Wang, J.; Gao, S. A robust SVD-UKF algorithm and its application in integrated navigation systems. Adv. Space Res. 2025, 75, 1902–1912. [Google Scholar] [CrossRef]
- Zhang, X.; Yuan, S.; Yin, X.; Li, X.; Qu, X.; Liu, Q. Estimation of skid-steered wheeled vehicle states using STUKF with adaptive noise adjustment. Appl. Sci. 2021, 11, 10391. [Google Scholar] [CrossRef]
- Tian, F.; Wang, J.; Li, K. A Novel Strong Tracking ETUKF for State Estimation of Preceding Vehicles Using V2V Communications. IEEE Trans. Veh. Technol. 2023, 72, 12500–12507. [Google Scholar] [CrossRef]
- Huang, P.; Li, H.; Wen, G.; Wang, Z. Application of adaptive weighted strong tracking unscented kalman filter in non-cooperative maneuvering target tracking. Aerospace 2022, 9, 468. [Google Scholar] [CrossRef]
- Zhang, W.; Hou, Y. A Modified Strong Tracking Adaptive Kalman Filter for Precision Clock Synchronization System. Ieej Trans. Electr. Electron. Eng. 2023, 18, 1702–1711. [Google Scholar] [CrossRef]
- Liu, J.; Chen, X.; Wang, J. Strong tracking UKF-based hybrid algorithm and its application to initial alignment of rotating SINS with large misalignment angles. IEEE Trans. Ind. Electron. 2022, 70, 8334–8343. [Google Scholar] [CrossRef]
- Yan, X.; Zhao, L.; Tang, C.; Zou, J.; Gao, W.; Jian, J.; Jin, Q.; Zhang, X. Intelligent MEMS Thermal Mass Flowmeter Based on Modified Sage-Husa Adaptive Robust-Strong Tracking Kalman Filtering. IEEE Sens. J. 2024, 25, 283–290. [Google Scholar] [CrossRef]
- Yang, Y.; Ding, J.; Shen, D.; Hao, T. Optimal Informat20es. J. Electrochem. Soc. 2023, 170, 090528. [Google Scholar] [CrossRef]
- Zhao, J.; Zhang, Y.; Li, S.; Wang, J.; Fang, L.; Ning, L.; Feng, J.; Zhang, J. An Improved Unscented Kalman Filter Applied to Positioning and Navigation of Autonomous Underwater Vehicles. Sensors 2025, 25, 551. [Google Scholar] [CrossRef]
- Zhao, J.; Wang, M.; Hu, X.; Zhang, L. Precise Pre-Close Wind Volume Calculation for Aluminum Electrolysis Based on Unscented Kalman and Average Filters. Appl. Sci. 2024, 14, 12046. [Google Scholar] [CrossRef]
- Zhou, Z.; Zhan, M.; Wu, B.; Xu, G.; Zhang, X.; Cheng, J.; Gao, M. A novel adaptive unscented kalman filter algorithm for SOC estimation to reduce the sensitivity of attenuation coefficient. Energy 2024, 307, 132598. [Google Scholar] [CrossRef]
- Singh, H.; Mishra, K.V.; Chattopadhyay, A. Inverse Unscented Kalman Filter. IEEE Trans. Signal Process. 2024, 72, 2692–2709. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time | Motion Model |
|---|---|
| 0–40 s | (70 m/s, 0 m/s) CV motion |
| 41–75 s | Constant Turn (CT) motion with angular velocity of 0.1 rad/s |
| 76–100 s | Constant Acceleration (CA) motion with acceleration of (0.1 m/s², 0 m/s²) |
| 101–135 s | Constant Turn (CT) motion with angular velocity of −0.1 rad/s |
| 136–175 s | (70 m/s, 0 m/s) CV motion |
| Tracking Algorithm | X-Axis Position (m) | Y-Axis Position (m) | X-Axis Velocity (m/s) | Y-Axis Velocity (m/s) |
|---|---|---|---|---|
| UKF | 2.3216 | 1.3404 | 1.2297 | 0.7064 |
| ST-UKF | 2.1833 | 1.2605 | 1.1925 | 0.6924 |
| AST-UKF | 2.0679 | 1.1939 | 1.1066 | 0.6396 |
| MAST-UKF | 1.7485 | 1.0057 | 0.7704 | 0.4456 |
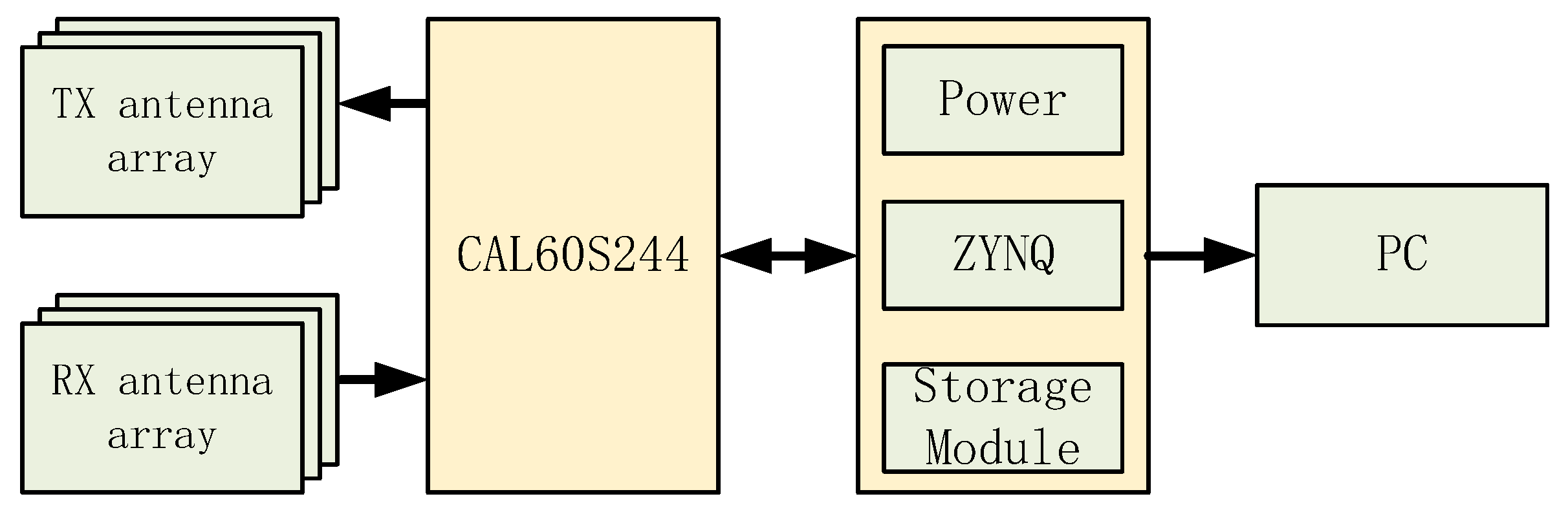
| Radar System Parameters | Parameter Value | Unit |
|---|---|---|
| Operating Frequency Range | 60–61 | GHz |
| Number of TX/RX Antenna Array | 4T/4R | - |
| Signal Bandwidth | 200 | MHz |
| Signal Pulse Period | 30 | μs |
| Tuning Frequency Rate | 6.7 | MHz/μs |
| Distance Resolution | 0.75 | m |
| Speed Resolution | 0.1 | m/s |
| Angle Resolution | 0.1 | ° |
| Data Rate | 20 | Hz |
| Tracking Algorithm | A X-Axis Position (m) | A Y-Axis Position (m) | B X-Axis Position (m) | B Y-Axis Position (m) |
|---|---|---|---|---|
| AST-UKF | 0.1705 | 0.7218 | 0.1039 | 0.7052 |
| MAST-UKF | 0.1568 | 0.4892 | 0.0971 | 0.5193 |
| Tracking Algorithm | A X-Axis Position (m) | A Y-Axis Position (m) | B X-Axis Position (m) | B Y-Axis Position (m) |
|---|---|---|---|---|
| AST-UKF | 0.1970 | 1.2894 | 0.1638 | 1.1379 |
| MAST-UKF | 0.1836 | 0.9372 | 0.1547 | 0.8836 |
| Rounds | AST-UKF | MAST-UKF |
|---|---|---|
| 1 | 44.222 s | 48.285 s |
| 2 | 43.572 s | 48.398 s |
| 3 | 44.171 s | 48.438 s |
| 4 | 43.865 s | 48.438 s |
| 5 | 43.686 s | 47.876 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, F.; Wang, S.; Fu, W.; Wei, T. Vehicle Target Tracking Algorithm Based on Improved Strong Tracking Unscented Kalman Filter. Appl. Sci. 2025, 15, 3276. https://doi.org/10.3390/app15063276
Tian F, Wang S, Fu W, Wei T. Vehicle Target Tracking Algorithm Based on Improved Strong Tracking Unscented Kalman Filter. Applied Sciences. 2025; 15(6):3276. https://doi.org/10.3390/app15063276
Chicago/Turabian StyleTian, Feng, Siyuan Wang, Weibo Fu, and Tianyu Wei. 2025. "Vehicle Target Tracking Algorithm Based on Improved Strong Tracking Unscented Kalman Filter" Applied Sciences 15, no. 6: 3276. https://doi.org/10.3390/app15063276
APA StyleTian, F., Wang, S., Fu, W., & Wei, T. (2025). Vehicle Target Tracking Algorithm Based on Improved Strong Tracking Unscented Kalman Filter. Applied Sciences, 15(6), 3276. https://doi.org/10.3390/app15063276