Abstract
Greenhouse cultivation in Almería, Spain, has experienced continuous growth over the last five decades, and this area has established itself as one of Europe’s leading vegetable-producing regions. With 8201 hectares under cultivation, tomatoes are the most important crop, accounting for 63% of the total value of greenhouse tomato production in Spain. The aim of this study is to design and develop a tool that facilitates tomato trellising under greenhouse conditions and allows it to be carried out at the ground level. An operating principle is developed, and a static analysis of the tool is carried out. Time, costs, and risk of falling from height are compared with traditional methods (ladders, stilts, manual wheeled scaffolding, and motorized scaffolding). The tool incorporates a telescopic carbon fiber mast, a direct-current motor, and electromagnets. The results indicate that the tool is the second fastest method (4′38″) and has the second lowest cost (EUR 8026.93). It is concluded that it is a viable option for trellising, since it eliminates the risk of falling from height while maintaining competitive times and reasonable costs.
1. Introduction
In Spain, greenhouse cultivation has experienced continuous growth since it was first established approximately 50 years ago, covering an area of 63,390 hectares currently [1]. The largest concentration is found in the province of Almería, located in the southeast of Spain, which is one of the most outstanding production regions in the world with regard to both area and volume. This region is known as “the sea of plastic” due to the significant area of greenhouses that cover a large part of its territory (32,827 hectares), representing 52% of the entire wintered surface at the national level [2]. Almería produced 80% of the total vegetables in Spain during the 2021/22 season [1,2], which gives a clear idea of the high profitability of this agricultural production system. Almería has managed to become one of the largest exporters of fruits and vegetables in Europe.
Among all horticultural crops, greenhouse production of tomatoes in Almería is a highly significant contributor to the economy, with approximately 8201 hectares under cultivation and a production of 730,745 tons [2]. In 2021, the Andalusian protected tomato area represented 76% of the total greenhouse area in Spain, with Almería accounting for 76% of this [3]. This crop represents about 63% of the total value of greenhouse tomato production in Spain [4], making it a key element in the export of fresh vegetables. Almería’s tomato exports are primarily destined for European markets, including Germany, France, and the United Kingdom, for which stable and high-quality production is demanded year-round. The competitiveness of tomatoes from Almería in the global market is attributed to the implementation of advanced production and biological control technologies, as well as the optimization of water resources through drip irrigation. The horticultural sector in Almería employs about 75,000 people directly [2]. Of these, it is estimated that around 11,000 jobs are related to tomato cultivation in Almería, mainly in the stages of sowing, maintenance, and harvesting of the fruit, as well as in the management and supervision of greenhouses, which have a high impact on job creation, including qualified and unqualified labor. Furthermore, there are considerable numbers of indirect jobs generated in auxiliary sectors, such as the transport, marketing, and production of phytosanitary products and agricultural machinery.
Since its beginnings in the 1960s, greenhouse infrastructure has undergone a re-markable technological evolution, adapting to production, climate, and sustainability needs. Greenhouses have transformed from being a rudimentary technique with low and flat structures that did not exceed 2 m in height to complex multi-tunnel and “scrape-and-tame” installations, which allow for more efficient and profitable agricultural production by reaching greater heights [5]. Today, these types of greenhouses have a maximum height between 3.7 and 4.3 m and a minimum height between 2.8 and 3.5 m, depending on the area [2]. These models have several advantages that directly affect agricultural production, such as microclimate control, which provides important control over ventilation and, thus, reduces the proliferation of pests and diseases while promoting uniform plant growth and increasing yield per cultivated area.
In certain horticultural products, such as tomatoes grown in greenhouses, it is necessary to carry out trellising to achieve greater productivity and quality in the crop by improving the lighting and ventilation, as well as preventing the fruits from touching the ground [6]. The trellising system that is usually used in common practice is the hanging system and, lately, a variant of this type of support has been introduced; this is also known as the “Dutch” or “hanger” technique. This technique consists of placing a main steel-wire trellising line that supports the weight of all plants at a crop height between 3 and 3.5 m. A hook or “hanger” is placed on it, where the plant is wound with a thread of plastic raffia [7] that has previously been placed in a spiral around the plant and that will support the crop. As the plant grows, the hanger must be unhooked and the raffia must be released and re-hooked, letting it fall as the plant grows, until the production cycle is finished, which is a fairly repetitive job [8]. The disadvantage of this is that more labor resources and time are required, resulting in higher production costs. Furthermore, this work is performed at a certain height from the ground, with the resulting danger that the farmer may fall from height [9]. Therefore, although this technique improves the profitability and productivity of crops such as tomatoes [10], it is still necessary to remove these safety-related drawbacks.
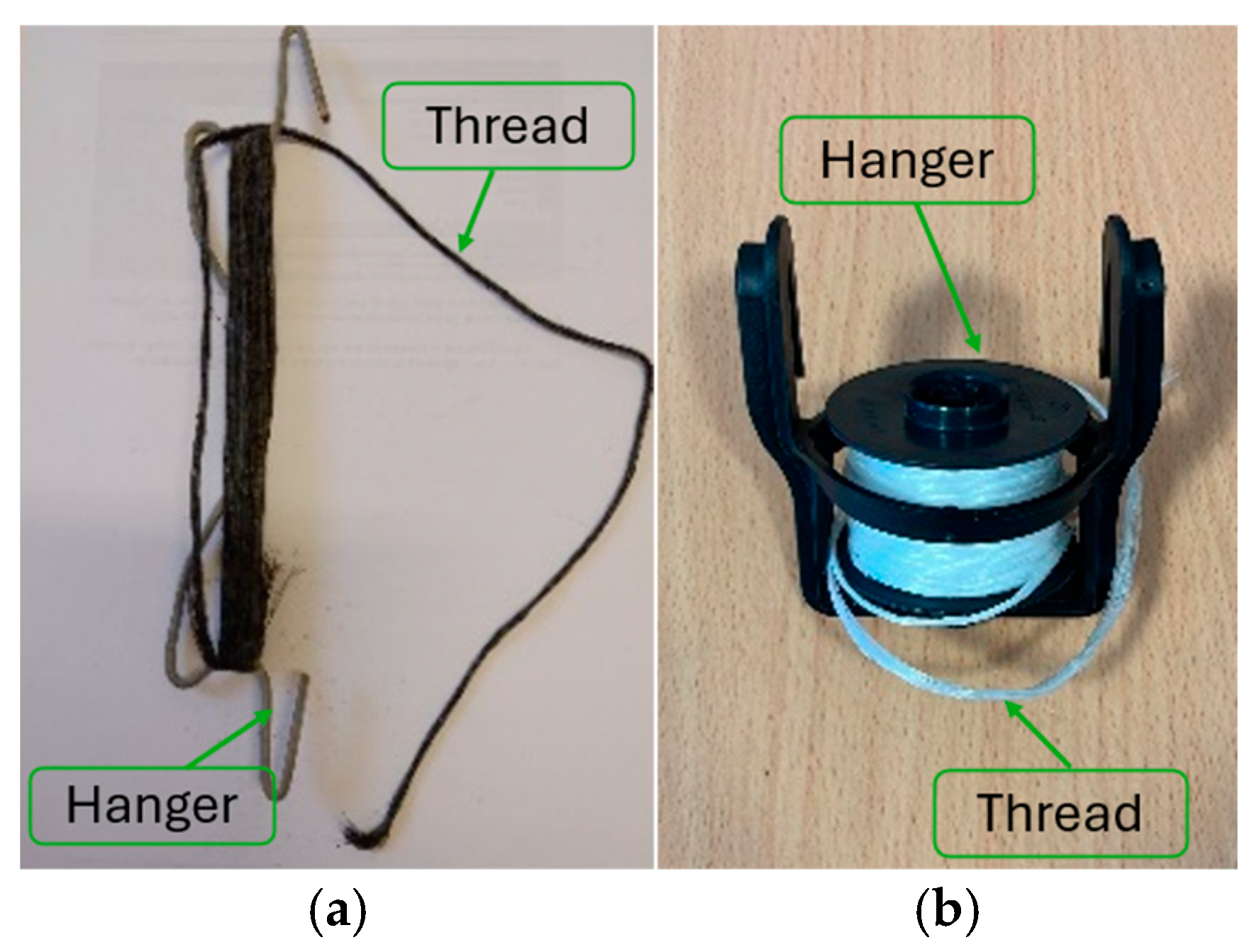
Crop hangers that are commonly used in agriculture in southeastern Spain can be classified into two groups [8]: (i) traditional hangers, consisting of a steel-wire or plastic hanger around which the training thread is wound, and (ii) new-generation hangers, consisting of a coil with the thread attached to the body of the hanger, some of which may have a locking system to stop the training thread. Figure 1 shows an image of each type of hanger. The biggest drawback of the new-generation hangers compared with the traditional ones is their price, which may be almost double that of traditional hangers and, hence, traditional hangers are more often used in most greenhouses. Other systems to support crops in a vertical position in greenhouses are used to replace the practice of manually untying and retying the support ropes to lower the plant when it has reached the height of the greenhouse eaves. This is achieved by establishing a modular division that allows the lowering of each plant or a complete row of plants by cutting the support ropes or ropes arranged appropriately so that they allow the continued growth of the crop [11].
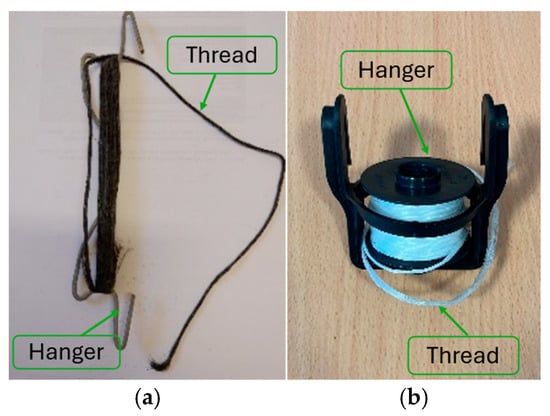
Figure 1.
Types of cultivation hangers: (a) traditional hangers; (b) new-generation hangers.
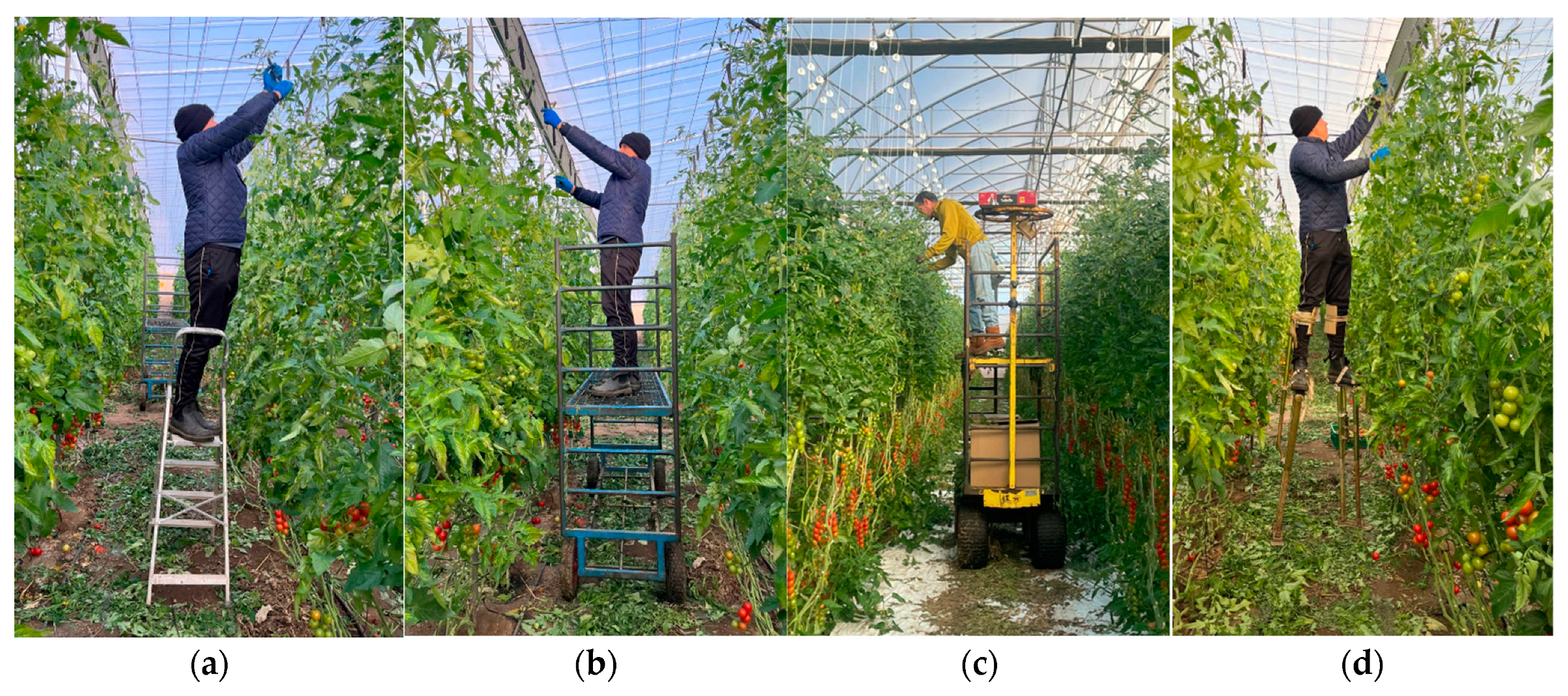
Focusing on the trellising task, specifically the handling of the hangers, it can be observed that there are different devices that help farmers gain height to carry out the trellising activity on plants. The most common device is a traditional ladder, which has two main drawbacks: firstly, it must be moved sideways to reach each hanger and, secondly, the danger it presents because it is supported by a sandy surface that is not firm (Figure 2a). Some agricultural companies have designed manual scaffolding with wheels (Figure 2b), which is safe when the trellising activity is being carried out, but this has the drawback that, for every certain number of hangers, the scaffolding has to be moved and the farmer has to get off, move the scaffolding, and get back on, leading to a risk of falling when going up and down and a loss in efficiency. Motorized scaffolding (Figure 2c) has also been designed, which is quite efficient, but it still presents the danger of working from a height. Additionally, the action of climbing onto the platform presents a risk of falling and this approach implies a high economic cost. Finally, there are stilts (Figure 2d), which are very efficient, but they present a great danger to the farmer due to their instability. The extreme severity of falls or accidents related to their use is also noted, which is why their use is prohibited in some places.
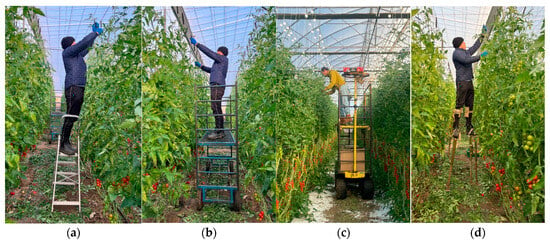
Figure 2.
Techniques for accessing the supporting wire to create a greenhouse trellising system using (a) manual ladders, (b) manual scaffolding, (c) motorized scaffolding, and (d) stilts.
The incorporation of robots or robotic arms to perform agricultural tasks, such as trellising, phytosanitary treatments, and harvesting [12,13,14,15], is currently a developing line of work at commercial levels. For their adoption to be profitable and for farmers to overcome technical and cultural reluctance [16,17,18,19,20,21], it is essential to address the high economic investment required for their implementation [22]. Until then, it is necessary to incorporate technological advances that are easy to handle, improve productivity and worker safety, and minimize costs for farmers. This is the aim of the tool designed in this study.
The incorporation of robots and automation in greenhouses would be a great step forward for farmers in Almeria, who face various occupational risks due to the intensive nature of agricultural tasks. Among the most common accidents are those related to the use of manual tools, the handling of phytosanitary products, and falls from heights or greenhouse structures [9,23]. Repetitive and prolonged work in hot and humid conditions, together with the handling of heavy loads, also contributes to musculoskeletal injuries [24,25], such as low back pain, sprains, and joint strains.
The number of work accidents in the agricultural sector in Almería varies annually, although the most recent statistics report an average of 1200 accidents per year. Of these, the majority are minor accidents, such as cuts, bruises, and minor burns, which occur when handling tools such as pruning shears and knives or when coming into contact with hot surfaces inside the greenhouse. However, more serious accidents are also recorded, such as falls from ladders or support structures, which can cause fractures or more serious injuries. Poisoning problems due to excessive exposure to phytosanitary products are another significant cause of serious accidents. In 2023, the number of workplace accidents resulting in sick leave during working hours in the agriculture sector in Almería amounted to 1298. The causes of accidents related to falls in agriculture were classified as “breakage, fracture, bursting, collapse, or material failure” and “slip or trip with fall of individuals”, accounting for a total of 76 and 299 such accidents, respectively [26].
The main reason for accidents is usually related to a lack of adequate training in occupational safety and the incorrect use of personal protective equipment. In some cases, workers do not use the necessary safety measures, such as gloves, masks, or harnesses, increasing the risk of injury. The lack of ergonomics at work, manual handling of heavy loads, and physical exhaustion due to long hours under conditions of extreme heat also contribute to the number of accidents. These factors highlight the importance of implementing mechanisms and tools to prevent the presence of occupational risks, such as working at heights and improving workplace safety, to reduce the rate of incidents in the agricultural sector.
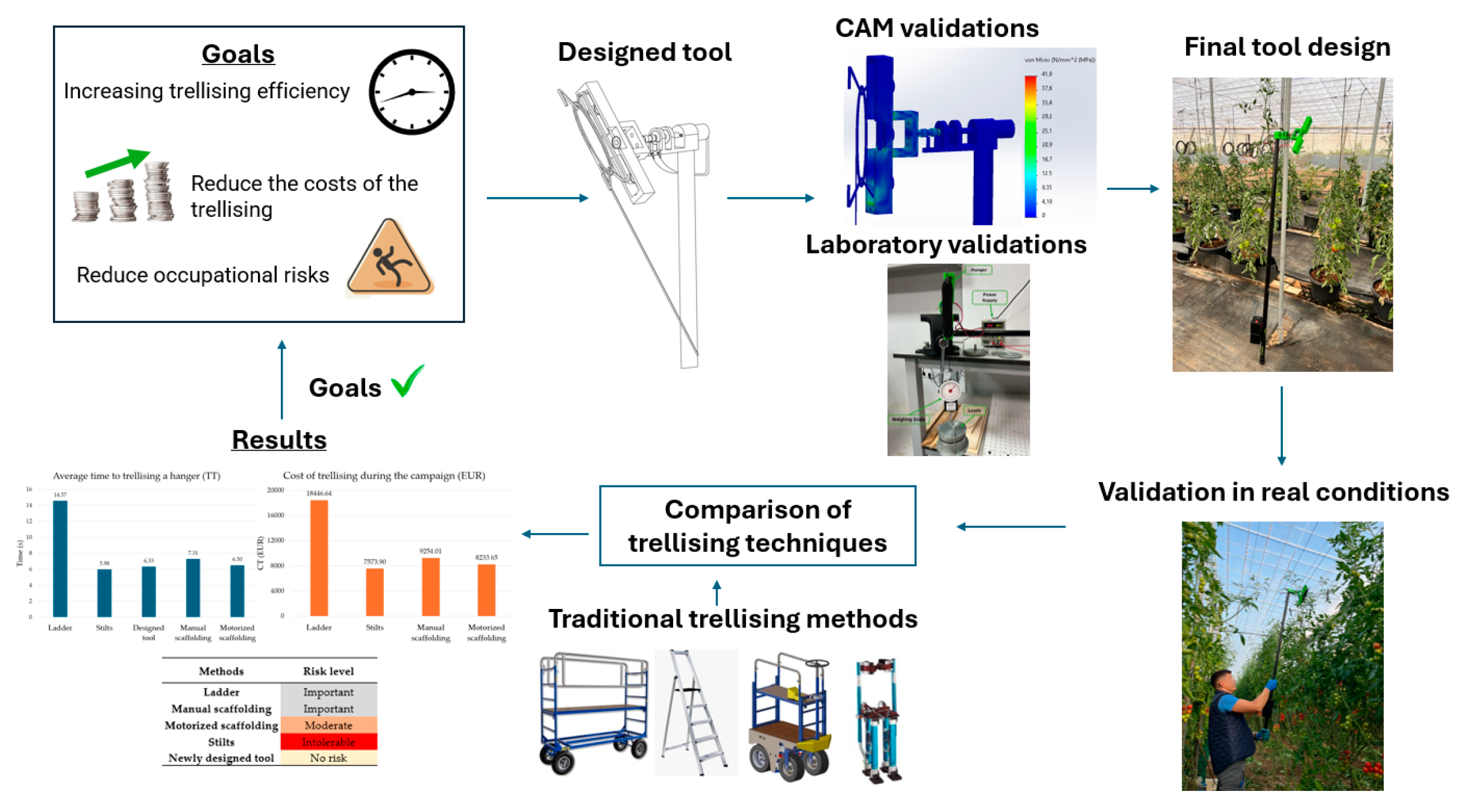
The aim of this study is to reduce the risk of accidents, improve efficiency, and reduce costs in the task of trellising tomatoes in greenhouses. To achieve this, it aims to design and develop a user-friendly tool that facilitates trellising from the ground. The manuscript continues in the next section with the design and modeling of the tool. In addition, the experimental validation method is described in Figure 3. The Results and Discussion Sections present the real greenhouse implementation of the tool, followed by its validation and comparative analysis against current trellising methods, confirming its proposed advantages. Finally, the main conclusions of the study are described.
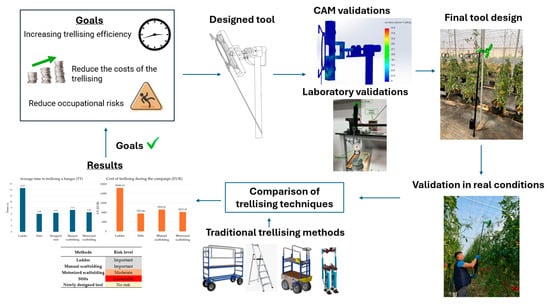
Figure 3.
Research process.
2. Materials and Methods
The proposed ground-level trellising tool was designed as a lightweight structure-supported mechanism for use in multi-tunnel and scrape-and-trench greenhouses. It was designed with an emphasis on cost-effective manufacturing and ease of operation while performing tasks, improving productivity, and, most importantly, minimizing the risks of working from a height for farmers. This section shows the design method followed for the manufacture of the tool and the studies carried out for its validation.
2.1. Research Method
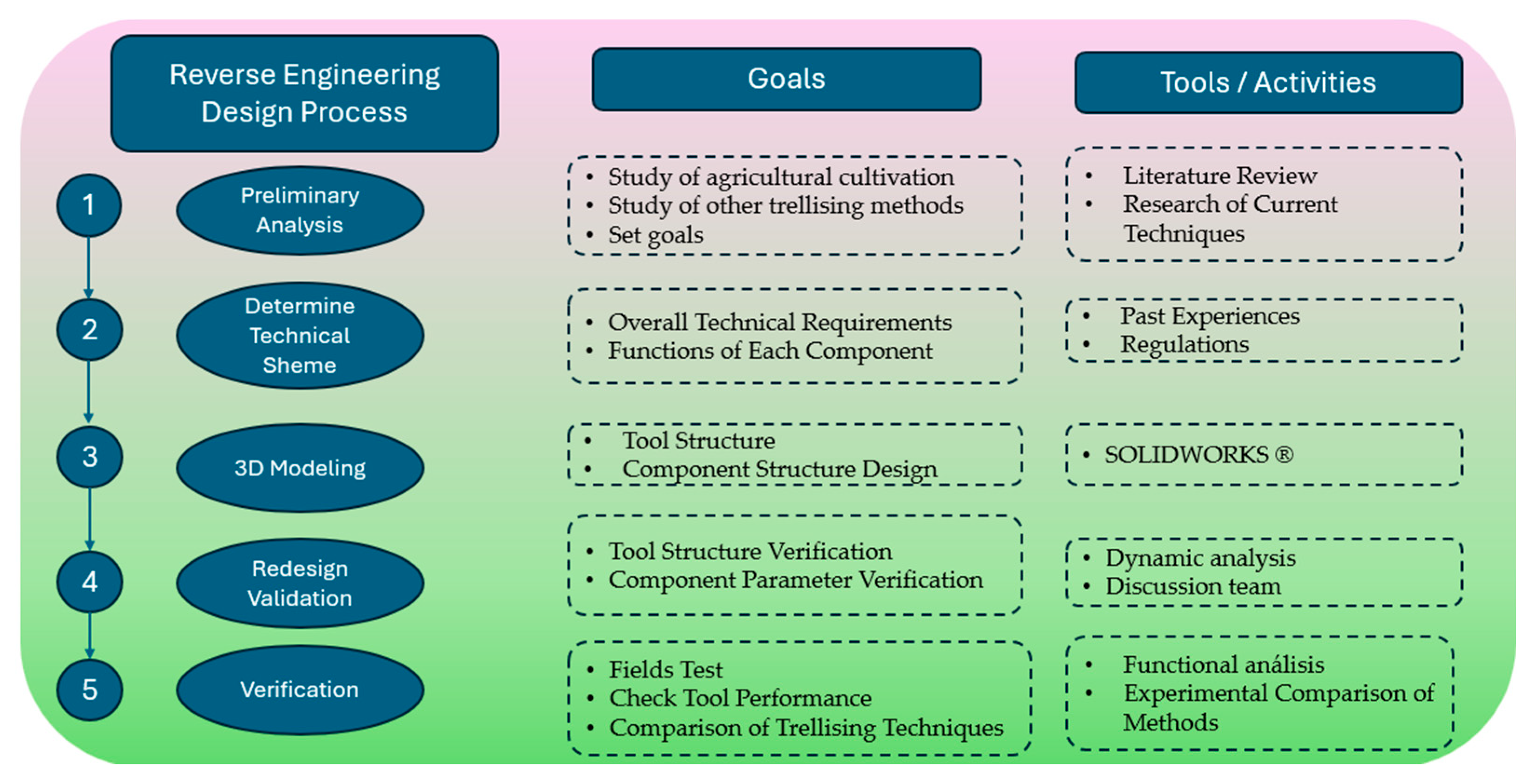
To address the problem of trellising in high-trellis greenhouses, a reverse-engineering approach was adopted [27,28]. This method allows one to identify and improve existing solutions through a detailed analysis of real conditions and the implementation of new design strategies. The general scheme of the process is illustrated in Figure 4 and consists of five main stages.
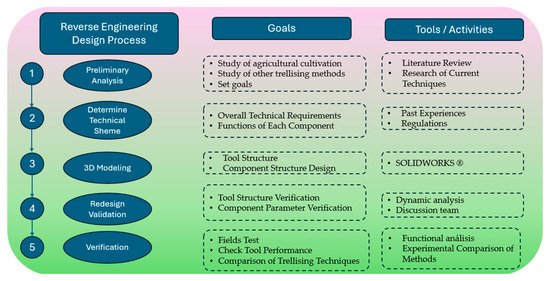
Figure 4.
Design method.
This structured method ensures that the developed tool is effective, functional, and able to meet the specific needs of trellising in tomato greenhouses using a hanging system with hangers.
2.2. Description of the Machine’s Design and Operation
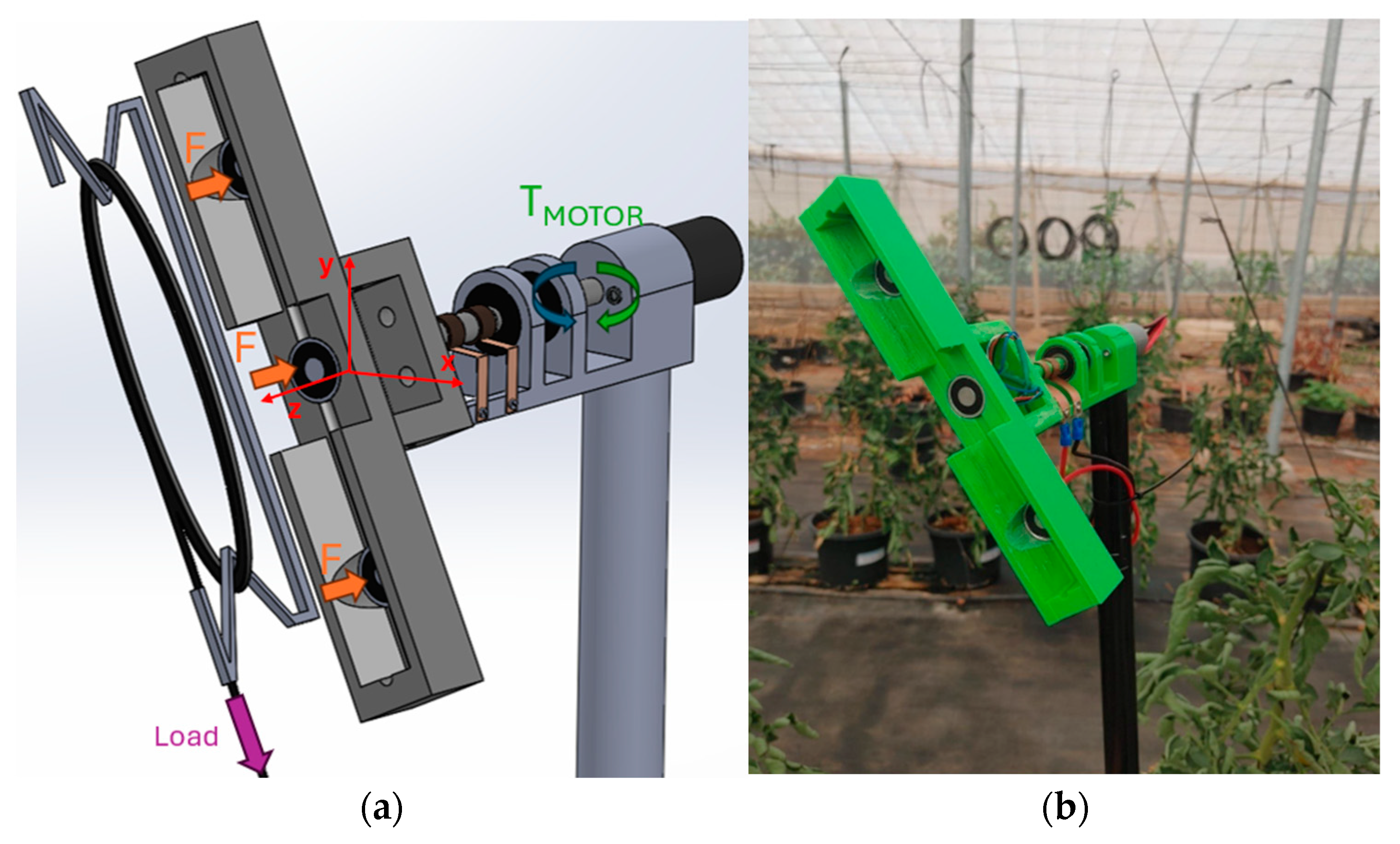
The operating principle of the tool is based on the magnetic forces generated by electromagnets (F), which enable the gripping of the hangers supporting the plants. The rotary motion transmitted by a direct-current motor (Tmotor) allows for the roll or unroll of the thread to which the plant is attached. The main forces involved are shown in Figure 5 and described below.
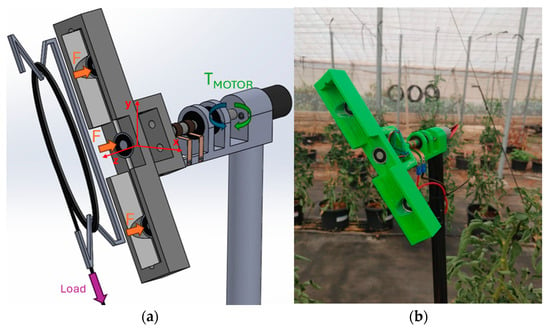
Figure 5.
Trellising tool: (a) tool with forces and torques present; (b) tool prototype.
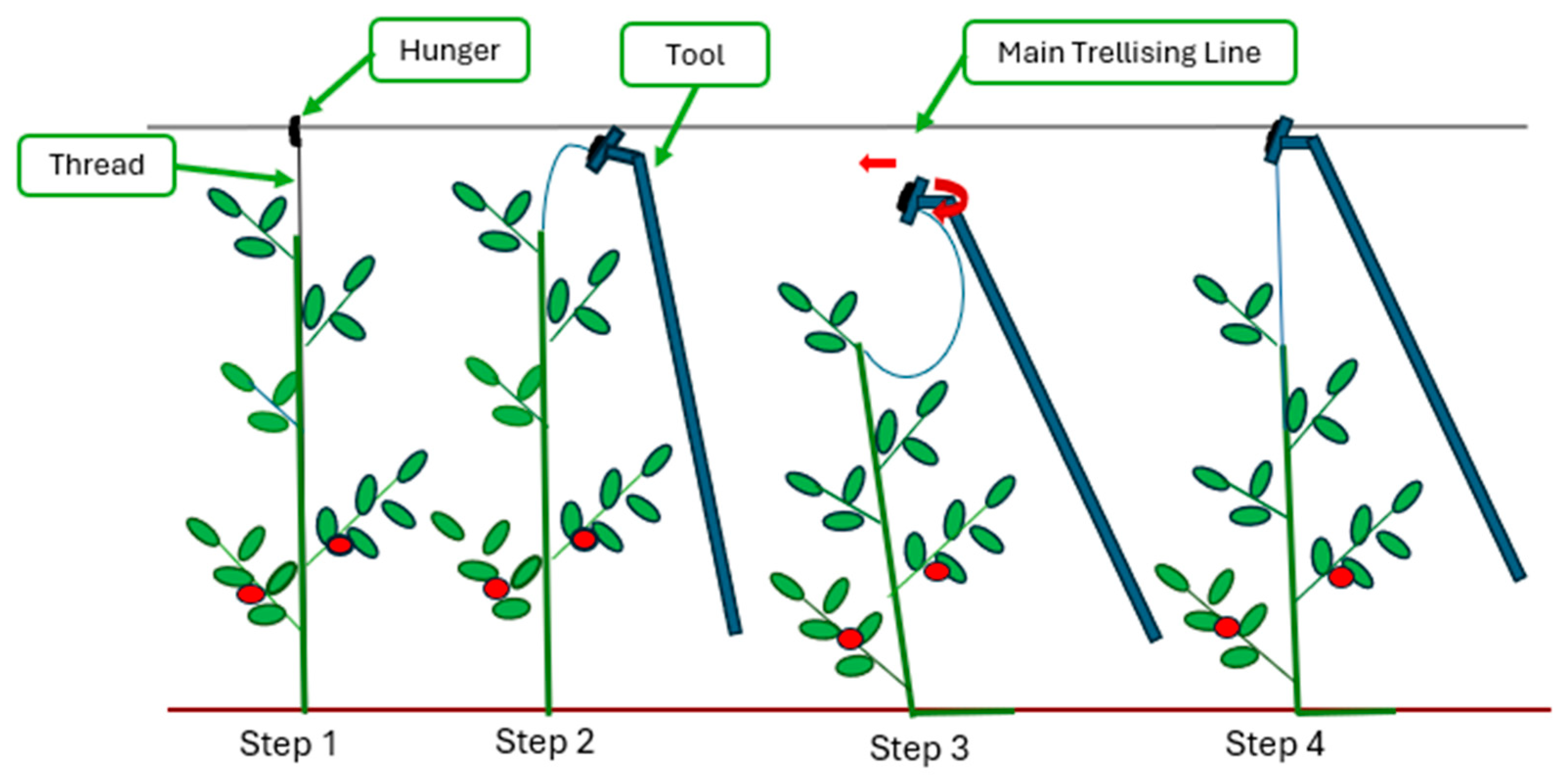
During the trellising process (Figure 6), the plant is initially supported by a hanger on the main trellising line (Step 1). The first action performed by the tool is to grasp the hanger holding the plant (Step 2). This is achieved by activating electromagnets, which secure the iron hanger. Next, the rotation motor is activated in the desired direction, depending on whether the intention is to release or roll the raffia (Step 3). Finally, the hanger is placed back on the main trellising line, and the electromagnets are deactivated, leaving the hanger suspended in a new location (Step 4).
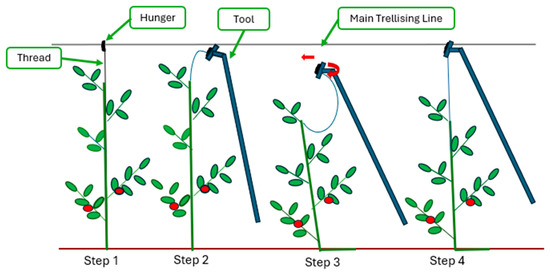
Figure 6.
Plant trellising process: (Step 1) tomato plant; (Step 2) lowering plant with tool; (Step 3) rotation of the hanger to release thread and lateral movement of the plant; (Step 4) with the help of the tool, the plant is placed in the new location.
The force F generated by the intensity of the magnetic field of the electro-magnet depends on the magnitude of the electric current flowing through the conductor, the number of turns of the wire around the core, and the properties of the ferromagnetic material used. The magnetic attraction force between an electromagnet and an object made of ferromagnetic material is described by the following magnetic attraction force equation:
This equation is an expression derived from Ampere’s law, which describes the force of attraction or repulsion between two coils carrying an electric current. In this equation, F represents the force (in newtons, N) between the coils. The term µ0 is the vacuum permeability (measured in henries per meter, H/m), a constant value that quantifies the capacity of the empty space to transmit magnetic fields. N is the number of turns or coils in the coil (unitless), while I is the electric current flowing through the coil, measured in amperes (A). The area A is the cross-section of the coil, expressed in square meters (m2), and g is the distance between the coils, measured in meters (m). This equation reflects how the force is directly proportional to the square of the current and the number of turns, and it is inversely proportional to the square of the distance between the coils.
This equation shows that the force of attraction increases with the number of turns, the intensity of the current, and the area of the core, and it decreases with the distance between the objects. Therefore, electromagnets are used as magnetic levitation devices to grasp the iron hangers that support the crops.
The torque provided by the DC motor reducer assembly must exceed the moment exerted by the plant’s weight when the hanger rack is in the horizontal position, as this is the most unfavorable condition. The torque can be calculated using the following expression:
Tmotor = d·load
Thus, the torque of the motor (Tmotor) in N·m is obtained from the product of the distance (d) in m and the load (load) supported by the tool in N. Based on the torque required to roll or unroll the hangers, it is possible to determine the necessary motor power for efficient operation. The power of motor (Pmotor) in W is calculated using the torque of the motor (Tmotor) in N·m, the angular velocity (ωmotor) in rad/s, and the mechanical efficiency of the motor (η).
To calculate the battery capacity, we must consider the total power of the system (Psystem) in W, which corresponds to the sum of the power consumed by the electromagnets (Pmagnets) and the electric motor (Pmotor).
Psystem = Pmagnets + Pmotor
Based on the total power of the system, it is possible to determine the electrical demand required (Isystem) in A from the battery, given that the supply voltage of the system components and the battery (Vsystem) is known to be 12 V. The following equation allows for the calculation of the required current (I).
The battery capacity (Cbattery) in Ah is determined based on the current demanded by the system (I) and the required operating time (t) (in hours, h) to ensure its functionality during a work shift.
Cbattery = Isystem·t
2.3. Methodology for Design Validation
In this section, it is proposed that a CAD simulation be carried out using SolidWorks 2023 software in order to perform stress analysis and the structural behavior of the tool be evaluated while supporting the weight of the crop. Additionally, experimental validation is proposed to determine the weight at which the tool fails. This validation will help to verify the results obtained and establish the operational limits of the tool under real load conditions.
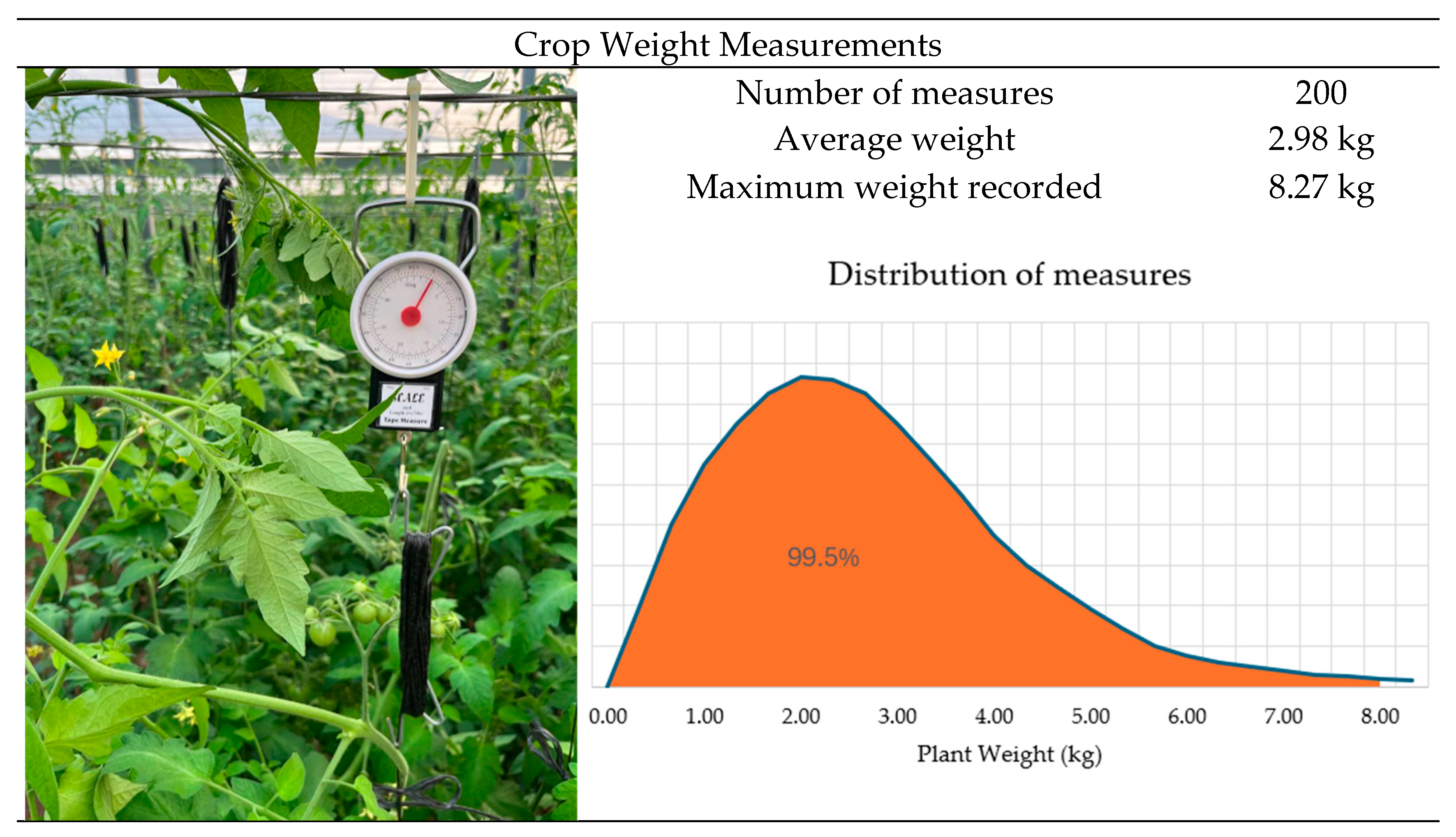
To obtain information about the weight that the tool must support, a measurement of the weight of tomato plants in full production was conducted, resulting in the data shown in Figure 7.
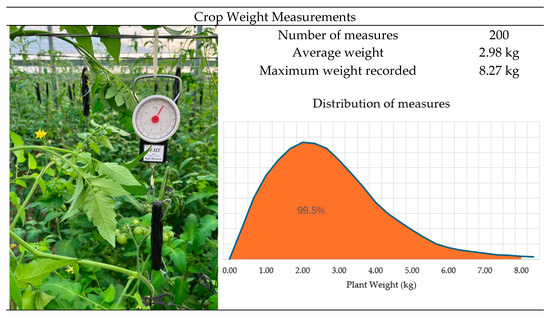
Figure 7.
Crop weight measurements.
The structure of the tool is based on the weight that it must support when lifting the hanger that holds a crop stem and rolling or unrolling the raffia that supports the plant. The maximum weight recorded in the measured plants was 8.27 kg. For the simulation, a more adverse load value of 15 kg was used [8]. Therefore, a CAE analysis was performed using SolidWorks software, where the tool was subjected to a 15 kg load.
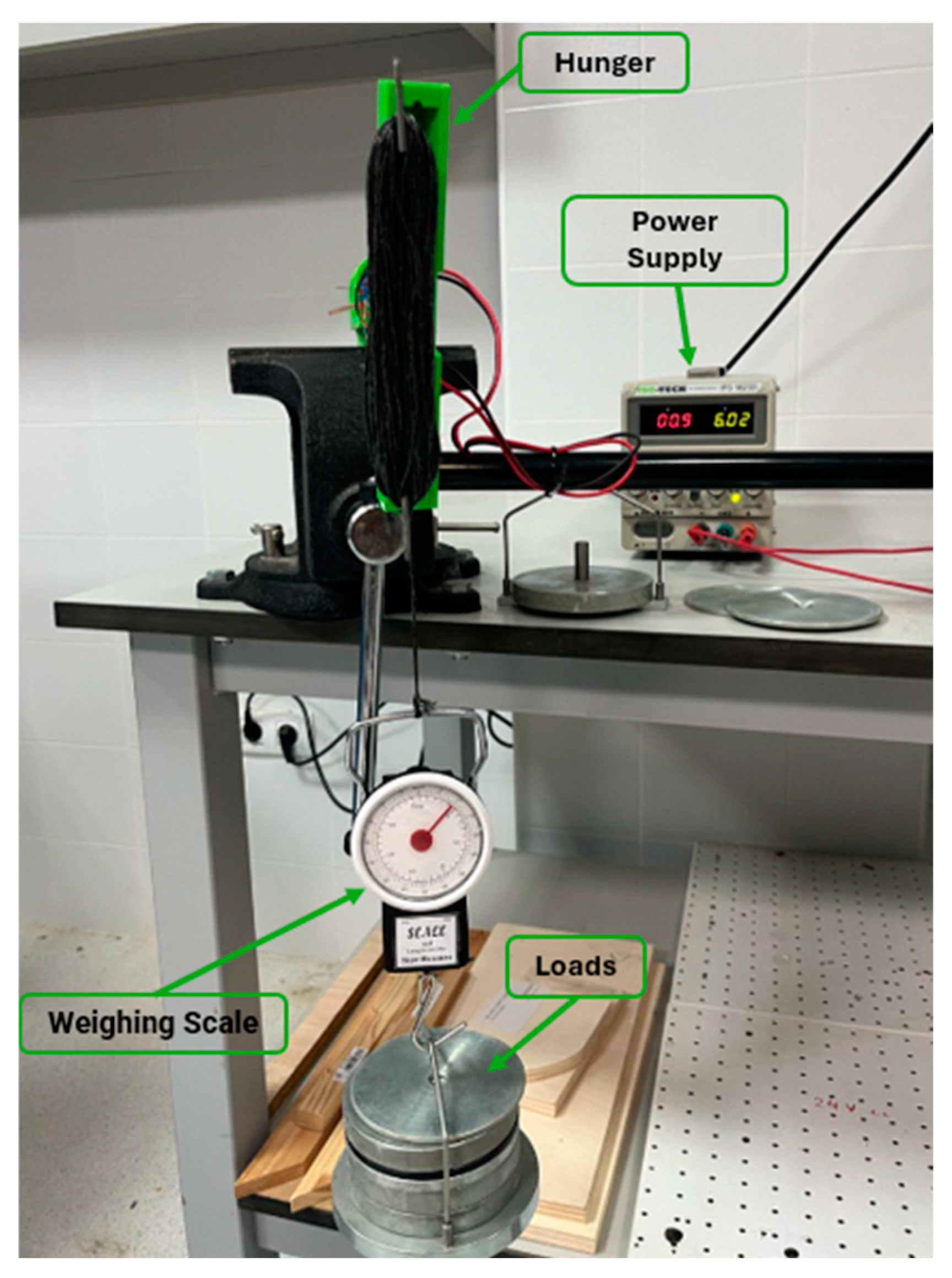
During the operational trials of the tool in the greenhouse, it demonstrated proper functionality, effectively performing the trellising task. The need to determine the critical load that the electromagnets can support under operating conditions led to the development of experimental validation in the laboratory. This test involves incrementally adding 0.5 kg weights to the hanger supported by the tool, and to simulate operating conditions, the motor was rotated three revolutions, representing the unwinding motion of the plant until failure occurred.
2.4. Methods of Analysis and Experimentation
2.4.1. Comparison of Trellising Times According to the Trellising Method
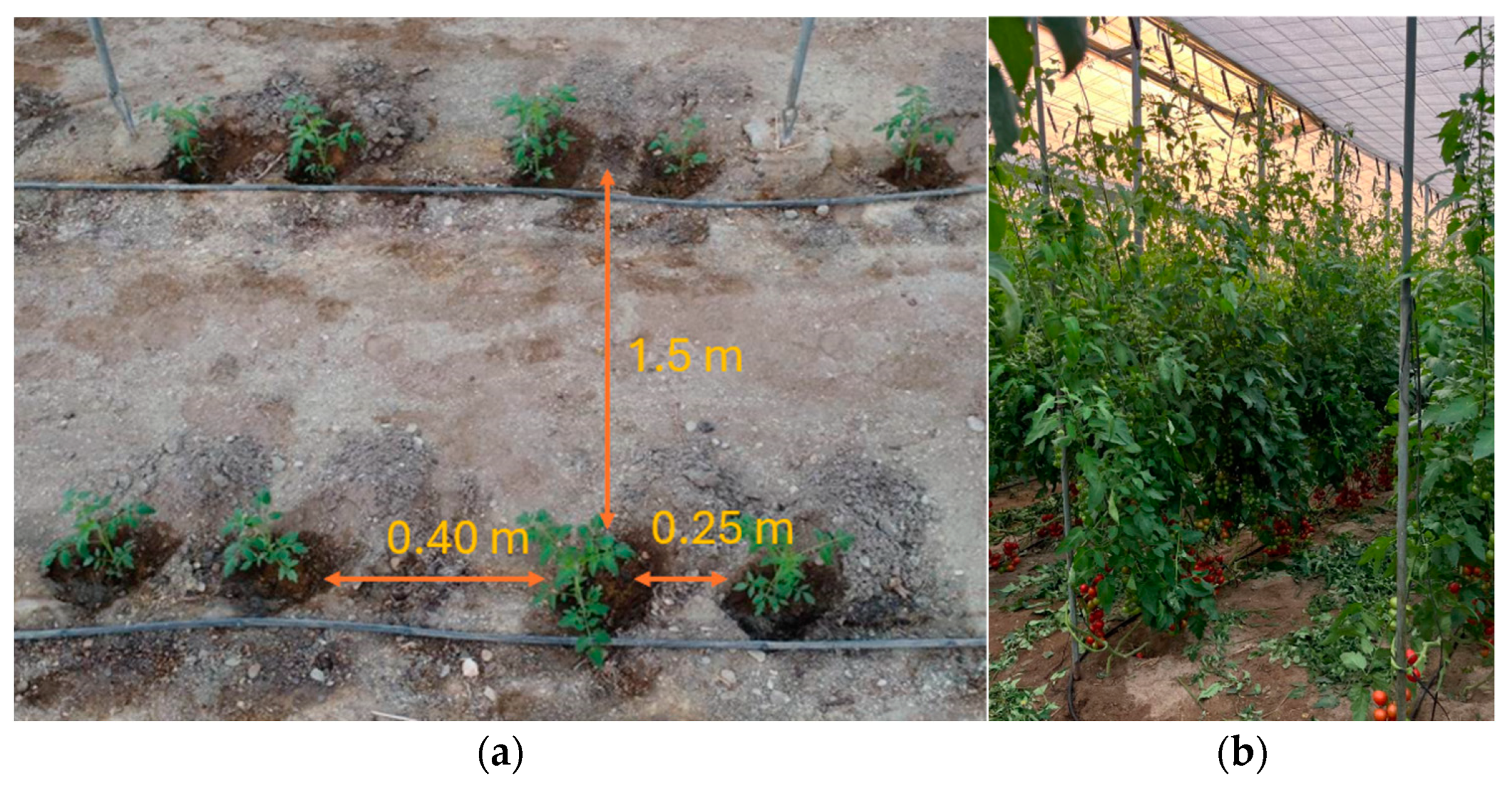
This analysis evaluates and compares the time required by a farmer to tutor a row three times. In this row, there are 15 plants (Figure 8a) and 44 removed stems, which means that there are 44 hangers (Figure 8b) when using conventional approaches versus using the tool specifically designed for this task. The main objective of this experiment is to determine the efficiency of the new tool in terms of time reduction and improved ergonomics of the process, providing objective data to assess its implementation in the agricultural sector. The data were analyzed using IBM SPSS Statistics 29.0.2. Significant differences among trellising methods were determined by analysis of variance (ANOVA). Tukey’s multiple range test was used to evaluate the processing time and trellising methods, while the least significant difference (LSD) test at p ≤ 0.05 was used.
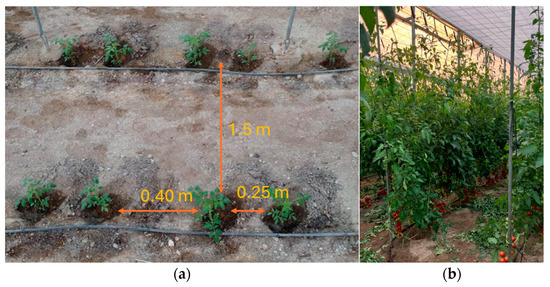
Figure 8.
Tomato cultivation system: (a) planting distribution of a row (meter); (b) stems supported on hangers.
2.4.2. Comparison of Trellising Costs During an Agricultural Campaign According to the Trellising Method
The purpose of this analysis is to evaluate the cost associated with trellising on one hectare of greenhouse tomato crops in the province of Almería during an agricultural campaign while considering different trellising systems. The study focused on evaluating the costs of trellising in one hectare of greenhouse with a total of 15,600 plants, each of which had three stems per plant, with each of these stems supported by a hanger. In total, 46,500 hangers were mounted over one hectare. Additionally, the number of times that a tomato had to be removed during the campaign had be taken into account; specifically, during the production period (October–April), this was performed once every two weeks. Thus, from the frequency of trellising per year (FT), the trellising time of a hanger using the method (TT), the cost per hour of the worker (CW), and the maintenance cost (MC), the cost of trellising could be obtained for a tomato farmer in one hectare per campaign (CT).
CT (EUR) = FT · TT · CW + MC
This approach allows an accurate assessment of the economic impact of trellising on greenhouse tomato production, providing key information to optimize the profitability of agricultural activity.
2.4.3. Analysis and Comparison of Occupational Risks According to the Trellising Method
The National Institute of Health and Safety at Work (INSST) occupational risk assessment method [29] was applied to analyze the risk of workers falling while trellising.
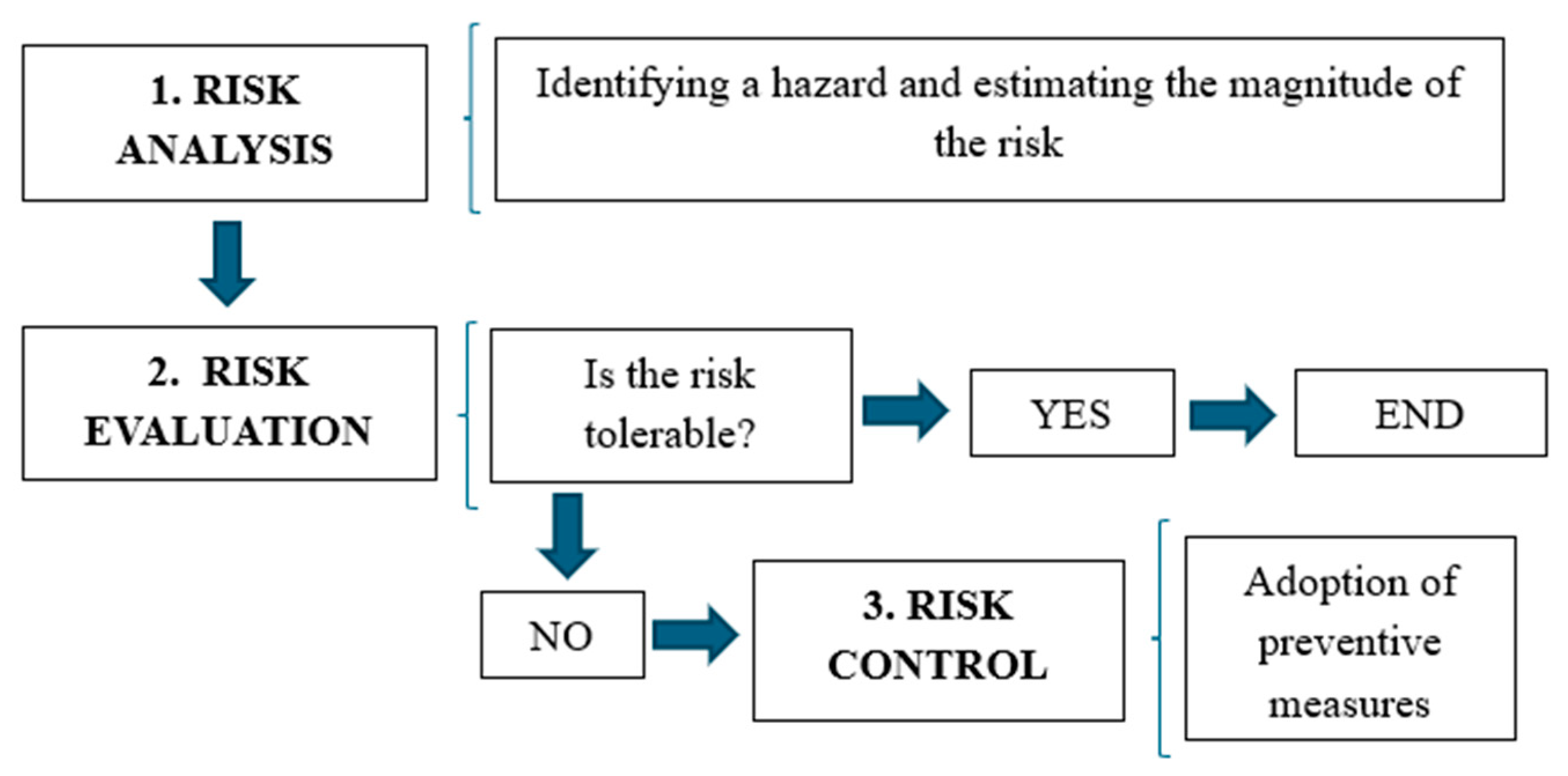
The method is based on identifying the magnitude of risks that cannot be avoided in order to establish the necessary preventive measures. Figure 9 presents the main phases of its application [29].
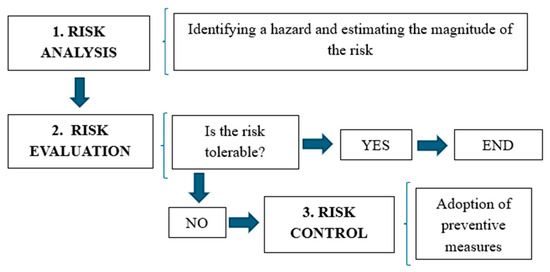
Figure 9.
Main phases in the INSST risk assessment method. Adapted from [29].
This study focuses only on risk detection and comparison between trellising methods, without implementing the last phase of control. The stages carried out for the evaluation of the risk of falling with the INSST method are the following [29]:
- Identification of the tasks to be assessed: the agricultural work to be analyzed is trellising in greenhouse tomato cultivation and it is carried out using five different methods (using a manual ladder, manual scaffolding, motorized scaffolding, stilts, and the newly designed tool).
- Collection of information on site: Two Almería-type greenhouses were selected (Table 1). The information was gathered by a professional qualified in occupational risk prevention through observation and interviews. In each greenhouse, the evaluation focused on a single worker performing the trellising tasks using the respective methods.
 Table 1. Greenhouse characteristics.
Table 1. Greenhouse characteristics. - Hazard identification: In this study, the only hazard that had to be assessed was the falling of workers at different levels. This is considered a major risk in this work.
- Risk assessment: the probability of a fall from height occurring for each trellising method and the consequences that it could have were analyzed.
- The probability was classified as high (damage always or almost always occurs), medium (occurs sometimes), and low (occurs rarely). Preventive measures that were already implemented were considered to establish the probability.
- The consequences of damage were classified as slightly damaging (superficial damage, discomfort, etc.), damaging (musculoskeletal disorders, severe sprains, minor fractures, etc.), and extremely damaging (serious fractures, multiple injuries, etc.).
Knowing the probability and the consequences, the risk level was obtained (Table 2).
Table 2. Risk levels according to the INSST method. Adapted from [29]. - Based on the risk obtained, the need to apply improvements and the urgency with which they should be carried out was decided. According to the risk, the following classifications were made:
- Trivial: no modifications were required.
- Tolerable: No changes were necessary, but more cost-effective options should be considered. Periodic checks should be carried out on the measures.
- Moderate: Measures should be implemented over a specific period of time to reduce the risk. If this risk is associated with extremely harmful consequences, additional measures should be taken to more accurately assess the likelihood of harm, which will serve as a basis for deciding whether control measures need to be improved.
- Important: Risk should be reduced before starting work. If the work is in progress, the time to solve the problem should be less than for moderate risk.
- Intolerable: Risk should be reduced before starting or continuing work. If this is not possible, the work should be stopped.
3. Results
3.1. Final Design of the Tool
This section outlines the materials used in the construction of the tool. The materials were selected based on the criteria of strength, durability, and efficiency to ensure optimal performance under the intended conditions. Figure 10 illustrates the key components and their interconnections within the tool.
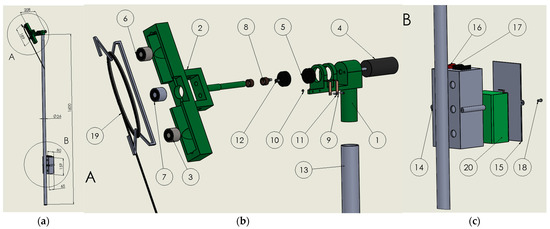
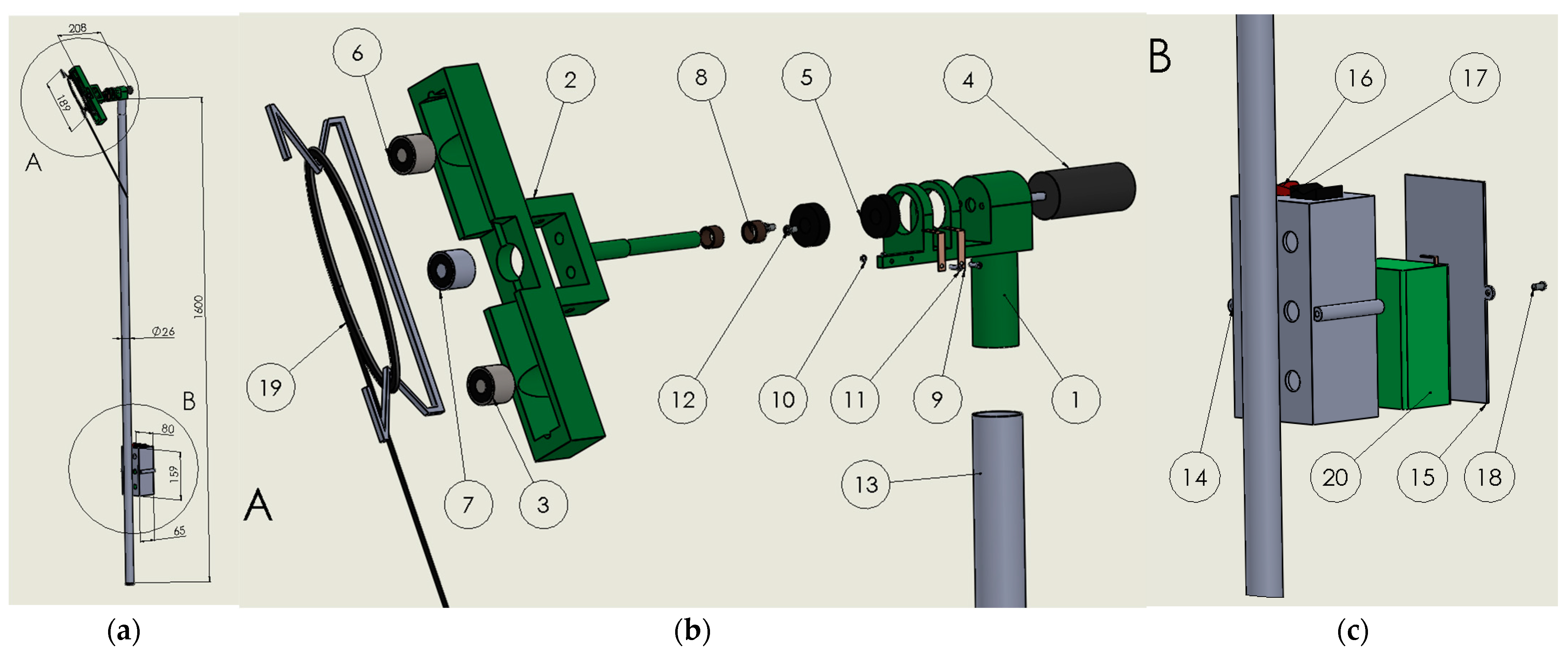
Figure 10.
Exploded view of the tool: (a) tool description; (b) detail A; (c) detail B.
The main components of the tool and the properties of each are described in Table 3.
Table 3.
Tool components.
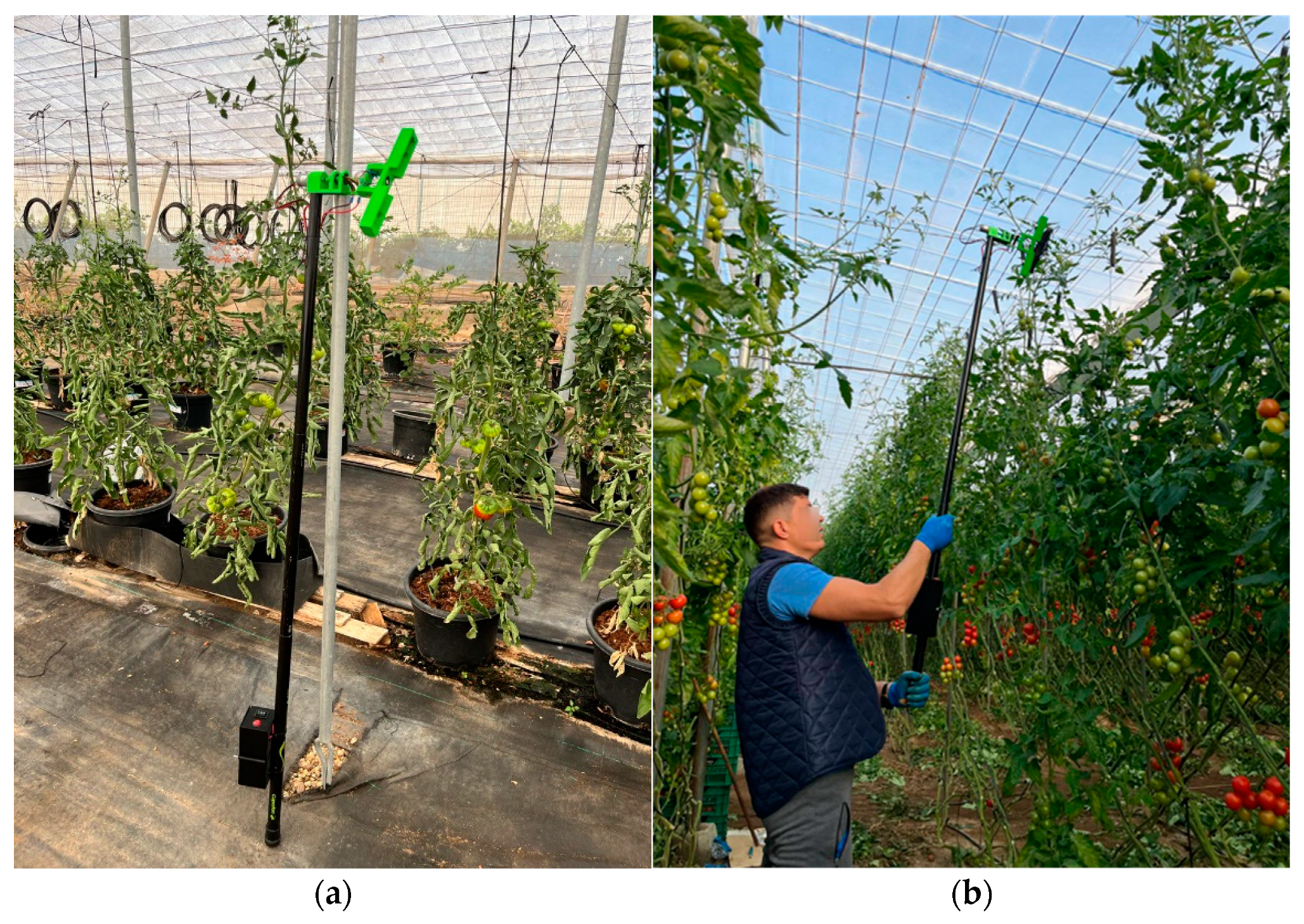
The tool was designed to optimize efficiency and enhance worker ergonomics during greenhouse trellising. This innovative tool features a telescopic carbon fiber mast with an adjustable length, enabling operators to perform tasks at height without the need for lifting platforms or ladders. By eliminating the risk of working from a height, the tool significantly increases operator safety, reducing the potential for workplace accidents. The tool allows for the handling of plants weighing up to 8 kg; beyond this weight, ergonomic issues may arise for the worker. According to the plant weight measurements taken in the greenhouse, 99% of plants are below 8 kg. When plants with higher weights are encountered, it is advisable to adopt measures such as pruning unwanted stems or harvesting the fruit to reduce the plant’s weight. It is worth noting that this issue would not only affect the use of this tool but also pose difficulties for any current trellising method. Additionally, it improves productivity by allowing easier and more precise access to elevated areas. Figure 11 shows an image of the farmer performing the trellising task with the prototype built from the final design of the tool.
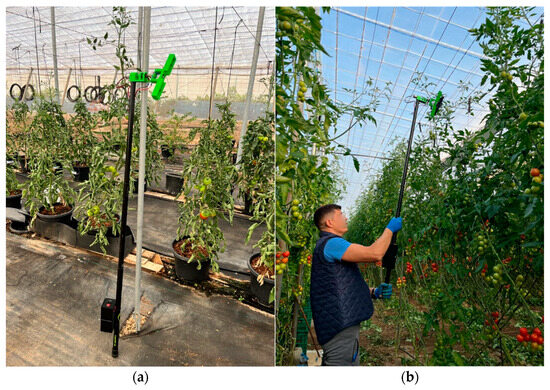
Figure 11.
Tool design and experimentation: (a) tool design; (b) tool experimentation.
To ensure that the tool can roll and unroll the raffia, a minimum torque is required. This minimum torque, provided by the DC motor, was calculated using Equation (2), resulting in a torque of 5.27 N·m. A compact DC motor reducer was installed, providing a torque of 6.45 N·m, operating at 12 V, and delivering a power of 15 W.
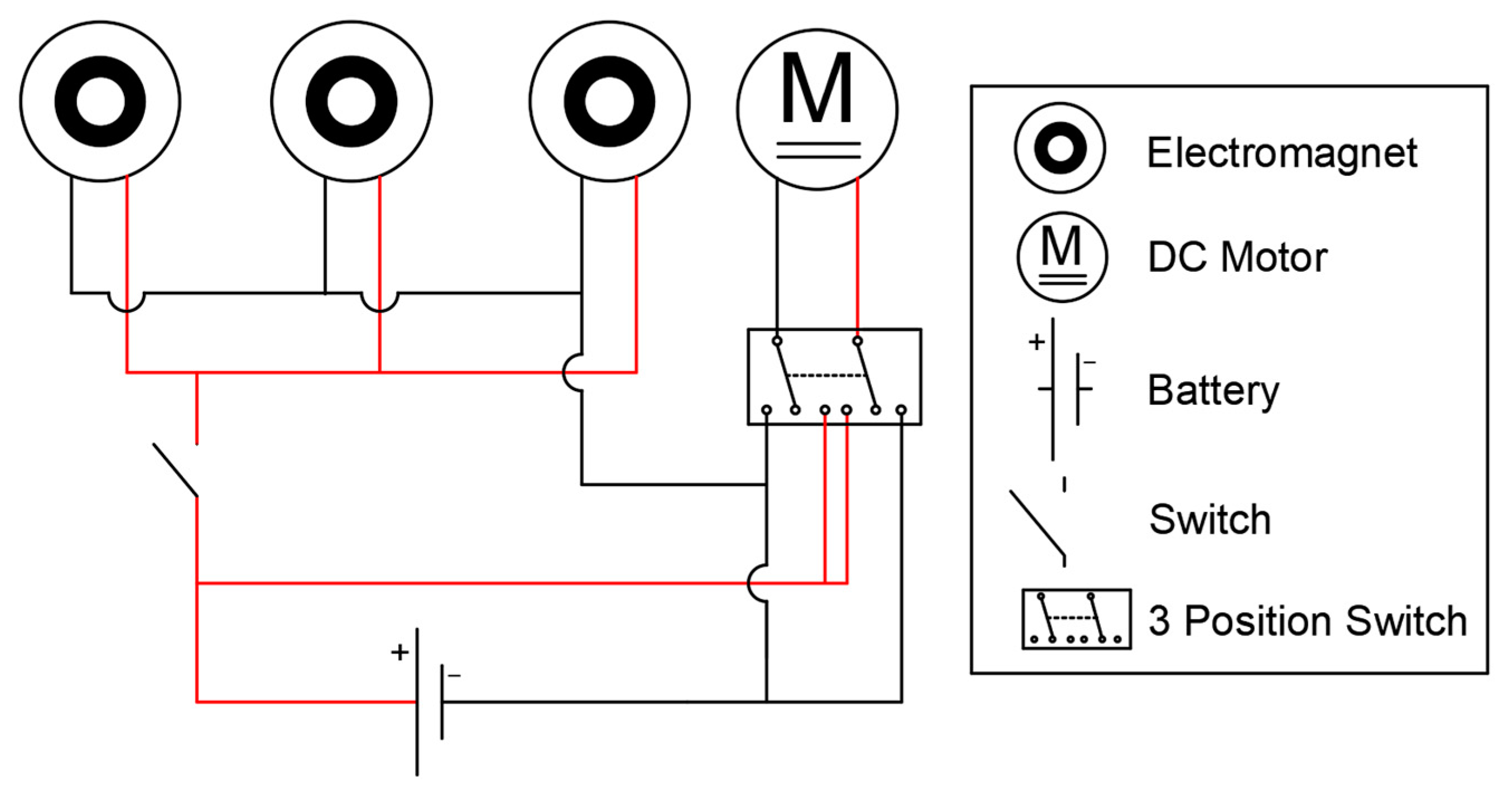
The electrical circuit (Figure 12) must supply power to three 3 W electromagnets and a 15 W motor, all operating at 12 V. A simple switch controls the activation of the electromagnets, while a three-position switch controls the motor’s rotation system. The circuit connections are made using two parallel circuits, one controlled by the simple switch, supplying power to the three electromagnets, and another parallel circuit controlled by the three-position switch to manage the motor’s rotation. These connections are made with 2.5 mm2 copper conductors. The power supply requirements were calculated using Equations (4)–(6), resulting in a total power demand of 24 W and a capacity of 16 Ah to power the tool for an 8 h workday. A 17 Ah battery was installed in the tool. The battery connection mechanism has been designed for quick and easy battery replacement, ensuring continuous operation without interruptions.
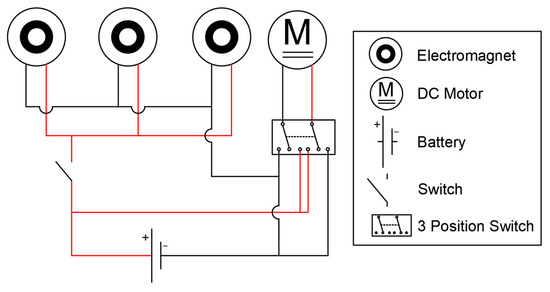
Figure 12.
Electrical circuit of the tool.
3.2. Results of the Experimental Validations
This section presents the results obtained from the CAM simulation and the dynamic validation of the maximum load with which the tool can operate before experiencing failure under operating conditions.
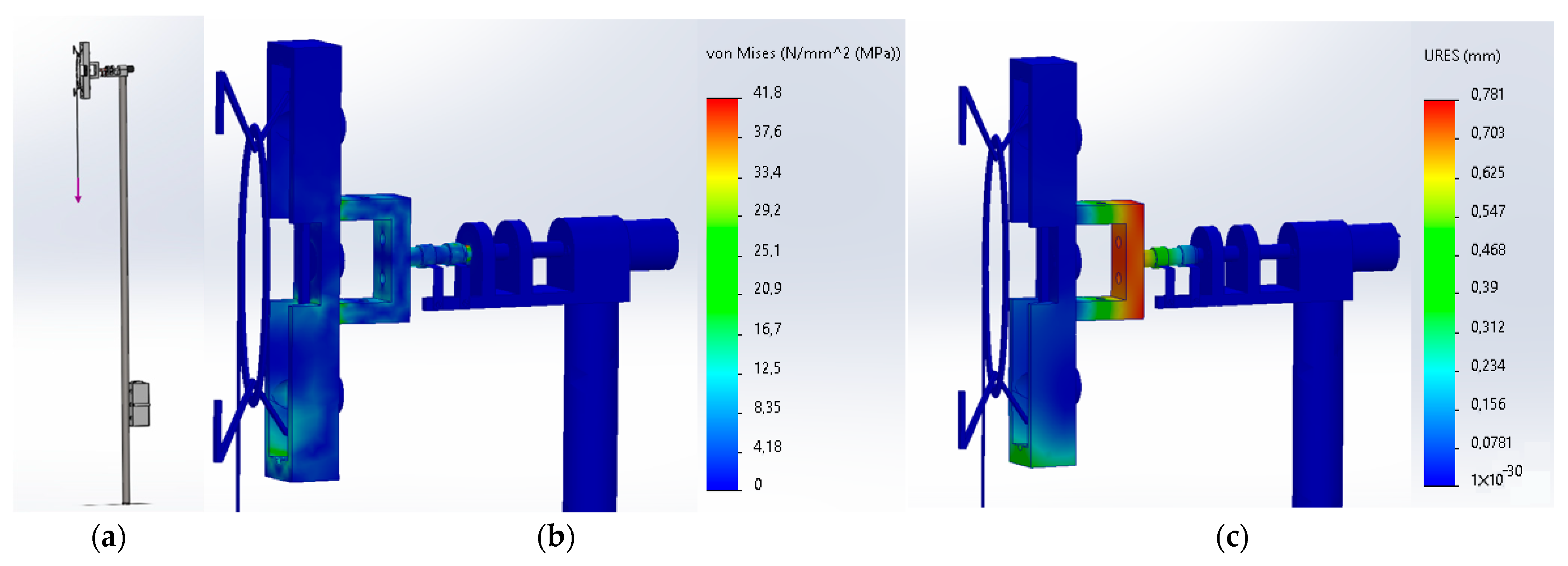
The results of the stress analysis under unfavorable conditions, where the tool had to support a 15 kg load, are shown in Figure 13. The highest stresses are found near the first bearing, reaching 41.8 MPa. This value does not exceed the elastic limit of PLA, which is 45 MPa [30], indicating that the tool would not suffer structural failures. Additionally, the displacement is less than 1 mm, which is negligible when handling the tool.
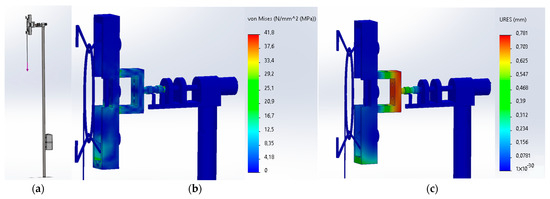
Figure 13.
Static analysis of the tool: (a) application of a 30 kg load; (b) results of stresses; (c) results of displacements.
In the experimental validation, 0.5 kg weights were progressively added, and the motor was rotated to simulate the hanging and unhanging of the plant, as shown in Figure 14. The validation results indicated that at a weight of 13.5 kg, the hanger detached from the magnets, leading to failure.
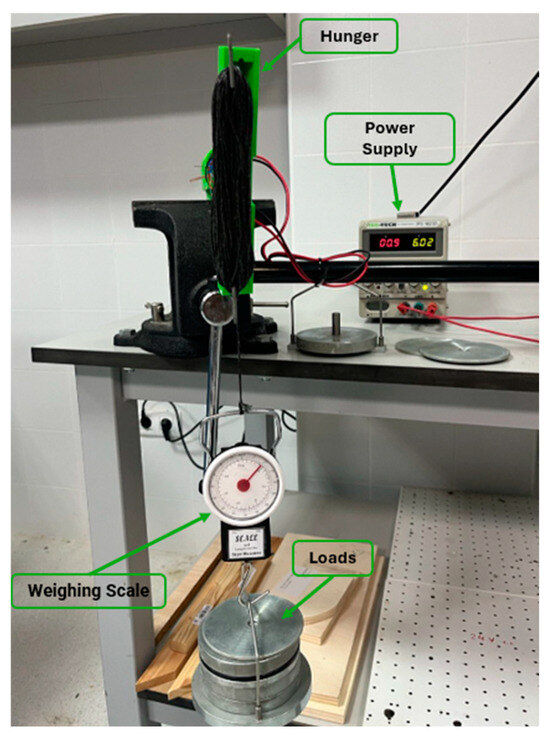
Figure 14.
Laboratory test.
3.3. Results of Field Experiments
In this section, the performance of the different trellising methods will be evaluated. To achieve this, three tests were carried out, focusing on efficiency, costs, and occupational safety. The efficiency test measured the time a farmer trellises a row of crops, carrying out three repetitions for each method, and the average of these times allowed the most efficient method to be determined. The economic study analyzed the total expenses per agricultural campaign on one hectare of crops, providing a comparison of each method. Finally, the occupational risk analysis presents the levels of danger to which farmers are exposed with each method, allowing for the identification of the safest and most dangerous method.
3.3.1. Analysis of the Registered Times
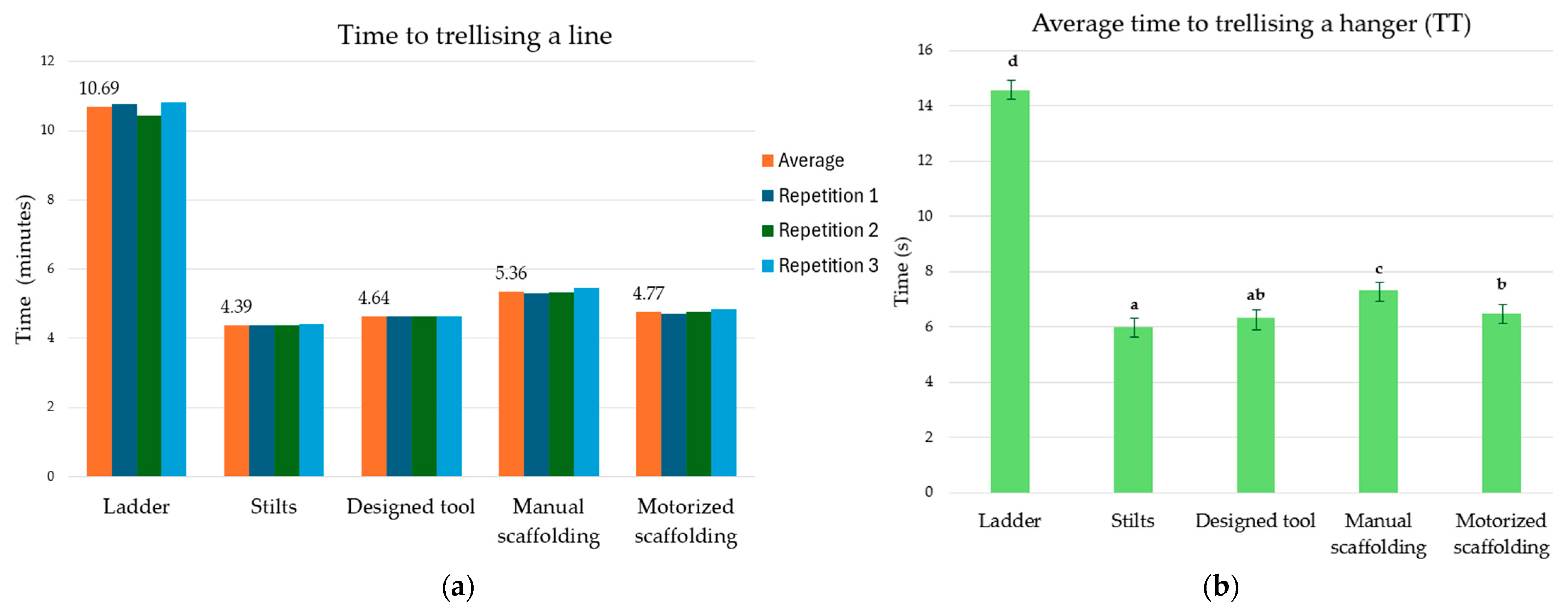
The results of the field experiments are shown in Figure 15, where the trellising time for a line of 44 hangers was measured. The fastest method was using stilts, with an average time of 4′23″, resulting in an average time per hanger of 5.98″. This was followed by the designed tool, which took 4′38″, with an average time per hanger of 6.33″. The times for mobile scaffolding were lower than those for manual scaffolding, with trellising times for the experimental line of 4′46″ and 5′21″, respectively, and average times per hanger of 6.50″ and 7.31″, respectively. The slowest method was using manual ladders, taking 10′40″ for the line, resulting in an average time of 14.57″ per hanger. The statistical analysis carried out reveals that all methods present significant differences in the average trellising per hanger, except between the stilts and the designed tool, where no significant differences are observed, as shown in Figure 15b.
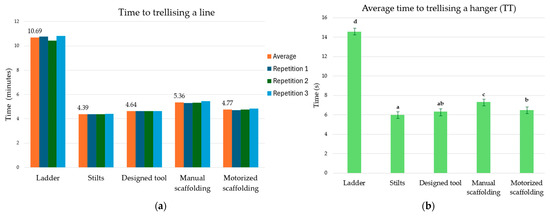
Figure 15.
Results of the registered times: (a) time to tutor a line (minutes); (b) average time to trellising a hanger (second). Different letters indicate significant differences (p < 0.05; Tukey’s HSD test).
3.3.2. Analysis of Trellising Costs According to the Trellising Method
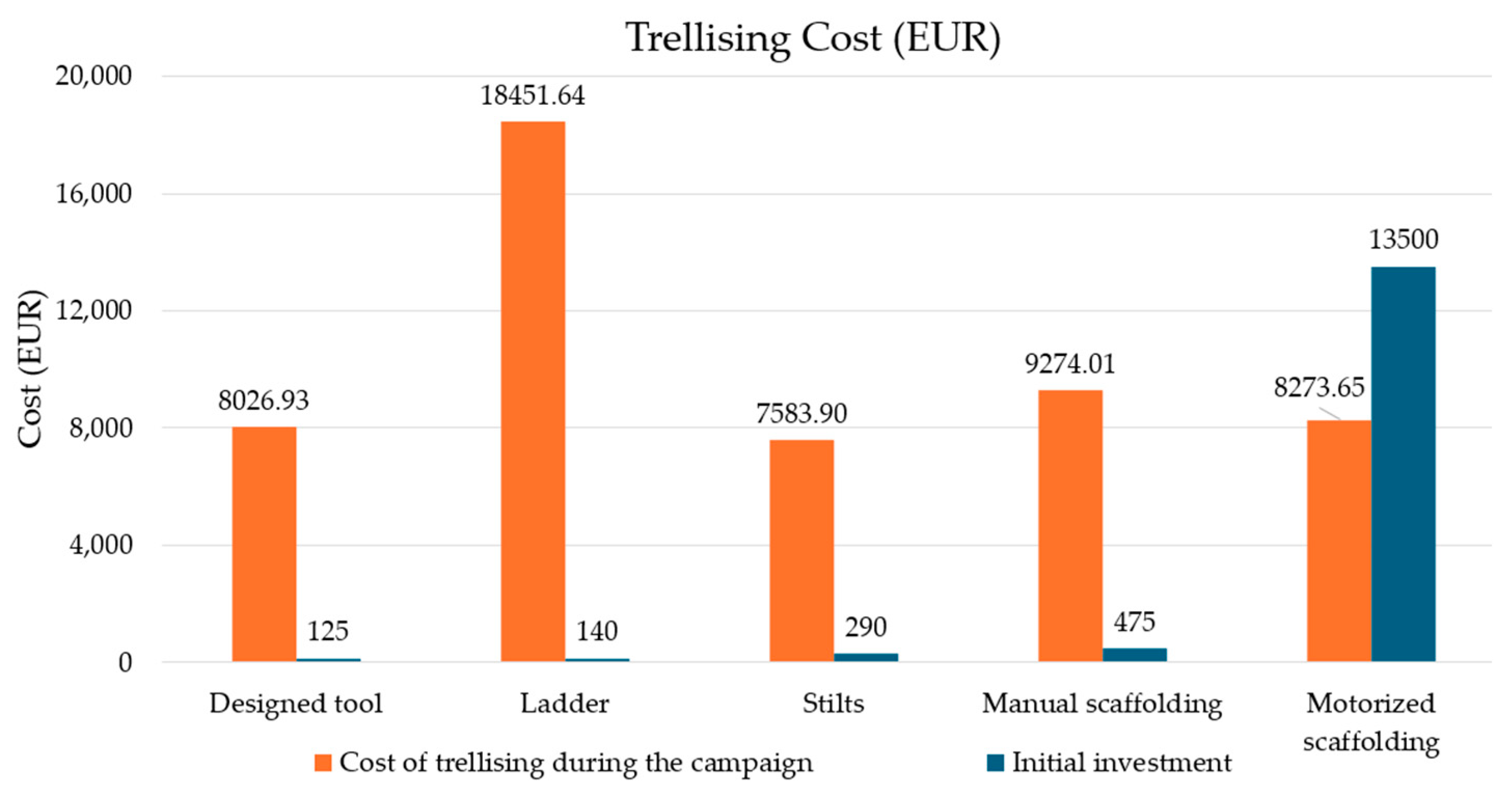
The results of the analysis of the cost associated with trellising in one hectare of tomato crops in the province of Almería during an agricultural campaign when considering the different trellising systems used are shown in Figure 16. The method that represented the lowest trellising cost during the campaign was stilts, which represented an expense of EUR 7583.90, with an acquisition cost of EUR 290. The second cheapest trellising method was the designed tool, which represented a cost per campaign of EUR 8026.93 and an acquisition cost of EUR 125. The mobile scaffold represented a trellising cost per campaign of EUR 8273.65, and it was the one with the highest initial investment of EUR 13,500 (Figure 16); the high cost of these scaffolds is due to the fact that they are not mass-produced in any factory. Instead, various suppliers manufacture them according to the specific requirements of farmers, such as soil type, greenhouse height, row width, and other factors. The one with the highest trellising cost per campaign was ladders, with a cost of EUR 18,451.64, an unviable cost for the farmer.
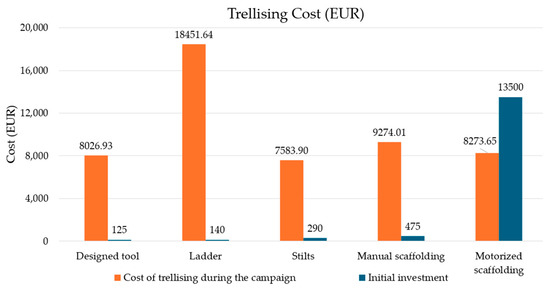
Figure 16.
Cost analysis.
3.3.3. Analysis of Risk Reduction for Farmers with the Designed Tool
For the application of the INSST method [29], the following information was collected during the period of observing and interviewing workers:
- Workplace: In both greenhouses, the support was laid along 1.5 m wide lines, so the worker could comfortably place bulky tools such as ladders and scaffolding. The sandy ground made the ladder unstable.
- Tools used: Farmers often used ladders, stilts, or scaffolding to carry out their work. During the observation, one of the farmers also used the newly designed tool for comparison.
- The materials used were hangers and raffia, so they should not have increased the risk.
- The working height was approximately 3 m. Work could not be carried out from the ground without the assistance of a tool for this purpose.
- The ladders and stilts did not have safety measures against falls from height. The scaffolding had railings on some parts of its perimeter. The ladder and manual scaffolding involved repeated climbs up and down throughout the work being carried out.
- The new tool allowed work to be carried out at the ground level.
The probability of damage and the consequences were determined from the information collected. From these, the risk level for each trellising method was obtained (Table 4).
Table 4.
Risk level for each trellising method.
The methods commonly used for the trellising of tomato crops pose a risk to workers. The highest level of risk (intolerable) is presented when trellising is performed with the help of stilts. This is followed by a ‘significant’ risk when ladders or wheeled scaffolding are used to reach the required height. The third most harmful level of risk according to the method also appears in the case of a worker on a motorized scaffold. The newly designed tool does not present a risk of falling from a height (Table 4).
4. Discussion
The results obtained from the design of the tool and the experiments carried out in greenhouses provide valuable information on the feasibility and efficiency of integrating this tool into the agricultural activity of Almería. This discussion interprets the design of the tool and the results of the experiments in the context of the existing literature while exploring possible design improvements and future research directions. During the tests, the design of the tool and the prototype developed demonstrated its successful practical applicability in tomato crops in the greenhouses of the province of Almería. This tool has allowed us to propose a new method of trellising for Almería farmers that allows them to avoid working from a height; in addition, we compared the efficiency and safety of this method with the current methods that are present in the agricultural sector.
Following the tests that were carried out, the results obtained in the field revealed significant differences in terms of time efficiencies and costs associated with the different trellising methods used in tomato cultivation. First, the analysis of the trellising times (Figure 15) shows that stilts are the fastest method, with a total time of 4 min and 23 s for the 44-hanger line and an average time of 5.97 s per hanger. This suggests that, from the point of view of efficiency, stilts offer a notable advantage over other tools and methods, especially when compared with manual ladders, which performed the worst, with a total time of 10 min and 47 s and an average time of 14.7 s per hanger.
If we analyze these times with respect to the average labor cost per hectare during a campaign, which is EUR 30,494 [2], the percentage of trellising costs would be between 25% and 60% depending on the method used—hence the importance of choosing an efficient trellising method. The average percentage of temporary labor hired for trellising tasks in the province of Almería is 17.3% [5]. However, when considering the cost analysis (Figure 16), we observe that although stilts have a relatively low cost of EUR 7583.90 per campaign, their use implies a significant risk for workers, classified as ‘intolerable’. This finding is consistent with previous studies that indicate that the use of stilts in agricultural tasks considerably increases the risk of work accidents, especially falls from heights, which represents a challenge in terms of occupational safety in intensive agriculture. On the other hand, the newly designed tool is presented as a competitive alternative both in terms of operating time (4′38″ total and 6.34″ per hanger) and cost (EUR 8026.93 per campaign), which makes it a viable option for farmers. Furthermore, it is important to note that this new device significantly minimizes the risk of accidents, as it does not require the worker to work at dangerous heights, which is a step forward in the prevention of occupational risks in the agricultural sector.
The use of stilts allows the farmer to reach the height required for trellising without taking up practically any space on the line. However, it is the most dangerous method of those presented to perform this task in terms of falls from height (Table 4).
The probability of falling is high, with climbing on stilts being one of the actions that leads to a greater loss of balance [31]. Other factors observed in situ in the greenhouse of the study where the worker uses stilts are unevenness of the ground (sandy surface) and the lack of safety measures for use (Figure 2d). The loss of postural stability is common and increases as the height of the stilts increases and with different foot arrangements (having one foot in front of the other produces a greater swing). Trips on obstacles are more frequent with their use [32]. The consequences of such a fall can be extremely harmful. Stilts also have risks of musculoskeletal disorders in the lower extremities [33,34].
When ladders are used, one of the factors that increases the probability of falling (Table 4) is their instability and poor balance [35]. It is observed that the lack of stability is aggravated during trellising due to the sandy ground of the greenhouse, which does not allow for safe support. Some authors indicate that accidents usually occur while the worker is standing on the ladder, but they also occur during ascent and descent [36], which is very common in trellising. Furthermore, not having both hands free during the climb increases the risk of falling [37], which is common during this work due to the transport of raffia. Fractures or bruises are the most common consequences that, in some cases, lead to the dismissal of workers [36].
Scaffolding poses a risk of falling from a height during trellising (Table 4), which is greater for manual scaffolding. This is because the worker has to go up and down repeatedly to move the scaffolding along the line. Motorized scaffolding, on the other hand, is driven from the platform. Frequent ascents and descents on manual scaffolding increase the risk of falling [38]. The location of materials on the platform where the farmer stands is a risk factor for falling due to obstacles. The risks of this equipment are not intolerable, as those used in the evaluated greenhouses have railings, an important measure for worker safety [39].
Measures are needed to reduce or prevent falls from height in agriculture. Some studies suggest training workers [40], paying greater attention to tasks at height and the work environment [41], using safety equipment [23], and wearing a bicycle helmet when using ladders [42], among other precautions.
The use of the proposed tool (Figure 11) allows the work to be carried out at ground level. The required working height is reached thanks to its adjustable handle, without any risk of falling for the worker. Therefore, it is possible to avoid a very common risk in this sector [43]. The telescopic mast is also designed to avoid awkward postures for the farmer. The International Labor Office indicates the use of tools with handles whose length is adjusted to the user as an ergonomic measure in the agricultural sector [44].
These results have direct implications for farmers in the province of Almería and other regions of tomato production. The balance among efficiency, cost, and safety must be carefully considered when selecting the trellising method. Although stilts are the most efficient and economical method, their high risk indicates dangers to worker safety. The newly designed tool appears to be the best option in terms of balanced factors, combining competitive trellising times, reasonable costs, and a much lower level of risk. One of the limitations of this study is that factors such as worker fatigue or the possibility of optimizing the methods analyzed based on other agronomic variables, such as crop type or soil conditions, were not considered. Future studies could focus on evaluating these factors and developing better trellising practices that minimize both risk and physical effort. For this purpose, a full (or fractional) factorial experiment is proposed in future research analyzing how multiple factors, depending on crop characteristics, farmer characteristics, and greenhouse conditions, affect the risk of accidents, efficiency, and cost of the trellising process [45].
In addition, it would be interesting to analyze the implementation of technological or automated solutions in the trellising process in order to further reduce the associated risks and costs.
The broader implications of these findings are significant for efficient and safe agricultural practices. Integrating the greenhouse trellising tool not only reduces the operational costs of agricultural campaigns but also contributes to occupational health and safety objectives. This dual functionality of efficiency and safety can help to offset the economic costs of production campaigns, particularly in greenhouses with uneven soils, where other trellising methods can pose safety risks or long trellising times, leading to high economic costs. Future research directions could focus on optimizing the design of the trellising tool and the materials used to further improve durability and performance. To improve the grip of the hangers, it is suggested to incorporate one or two solenoids in the tool head, in addition to using biodegradable materials for the raffia twine used in the trellising system [45], in order to contribute to more sustainable agriculture. Furthermore, exploring the integration of this tool into robotic arms or robots could provide a more comprehensive solution for greenhouse automation. Investigating the long-term performance and maintenance requirements of the tool under different working conditions would also provide valuable data to support widespread adoption. This study demonstrates the practical and theoretical feasibility of using trellising tools in greenhouse agriculture. The successful implementation and experimental characterization provide a solid foundation for future advancements in this field, highlighting the potential for more efficient and safer agricultural practices for workers.
5. Conclusions
The present study confirms that the proposed trellising tool is a viable and efficient solution for greenhouse tomato cultivation, with an average trellising time of 6.33 s and a campaign cost of EUR 8026.93. While stilts are slightly faster (5.98 s) and cheaper (EUR 7583.9), their high accident risk limits their practicality. The designed tool offers a safer alternative with competitive performance and reasonable costs, making it a valuable option for farmers. Its adoption can reduce operating costs and improve working conditions, contributing to the sustainability of intensive horticulture.
Author Contributions
Conceptualization, A.G.-C. and J.L.T.-M.; methodology, A.G.-C., M.G.-G. and R.M.C.; software, A.G.-C.; validation, J.L.T.-M., A.G.F. and R.M.C.; formal analysis, A.G.-C. and M.G.-G.; investigation, A.G.-C. and M.G.-G.; resources, R.M.C. and A.G.-C.; data curation, J.L.T.-M. and A.G.-C.; writing—original draft preparation, A.G.-C., M.G.-G. and J.L.T.-M.; writing—review and editing, A.G.-C. and J.L.T.-M.; visualization, A.G.-C. and M.G.-G.; supervision, A.G.F. and R.M.C.; project administration, J.L.T.-M. and A.G.F. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data are contained within the article. The tool files used for this study are available upon request from the corresponding author.
Acknowledgments
Part of this work is a result of the CyberGreen Project, PID2021-122560OB-I00, and the Agroconnect (www.agroconnect.es, accessed on 13 February 2025) facilities, grant EQC2019-006658-P, both funded by MCIN/AEI/10.13039/501100011033 and by ERDF “A way to make Europe”.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Ministerio de Agricultura, Pesca y Alimentación (MAPA). HORTALIZAS: Balance de campaña 2021/22 y Previsiones 2022/23. 2022. Available online: https://www.mapa.gob.es/es/agricultura/temas/producciones-agricolas/balancecampana2021-22perspectivascampana2022-23hortalizas_tcm30-635291.pdf (accessed on 19 September 2024).
- Cajamar. Análisis de la Campaña Hortofrutícola de Almería. Campaña 2021/2022. 2022. Available online: https://publicacionescajamar.es/series-tematicas/informes-coyuntura-analisis-de-campana/analisis-de-la-campana-hortofruticola-de-almeria-campana-2021-2022/ (accessed on 19 September 2024).
- Junta de Andalucía. Caracterización del Sector Agrario y Pesquero de Andalucía 2023. Ed: Consejería de Agricultura, Pesca, Agua y Desarrollo Rural. Junta de Andalucía. 2023. Available online: https://www.juntadeandalucia.es/sites/default/files/2024-04/Caracterizaci%C3%B3n%20Sector%20Agrario%20y%20Pesquero%20de%20Andaluc%C3%ADa%202023%20_0.pdf (accessed on 20 September 2024).
- Ministerio de Agricultura, Pesca y Alimentación (MAPA). ANÁLISIS CAMPAÑA 2022/23 DE HORTALIZAS DE INVERNADERO. 2023. Available online: https://www.mapa.gob.es/es/agricultura/temas/producciones-agricolas/analisishortalizasinvernaderobalancecampana2022_23yprevisiones2023_248noviembre2023_tcm30-665839.pdf (accessed on 20 September 2024).
- Valera, D.L.; Ureña, L.J.B.; Aiz, F.D.M.; Martínez, A. Los invernaderos de Almería: Análisis de su tecnología y rentabilidad; Cajamar Caja Rural: Almería, Spain, 2014; pp. 5–500. ISBN 978-84-95531-61-2. [Google Scholar]
- Camacho-Ferre, F. Técnicas de Producción de Cultivos Protegidos (Tomo II); Cajamar: Almería, Spain, 2004; pp. 1–389. ISBN 84-95531-17-X. [Google Scholar]
- López-Marín, J.; Gálvez, A.; del Amor, F.M.; Piñero, M.C.; Brotons-Martínez, J.M. The Cost-Benefits and Risks of Using Raffia Made of Biodegradable Polymers: The Case of Pepper and Tomato Production in Greenhouses. Horticulturae 2022, 8, 133. [Google Scholar] [CrossRef]
- Vazquez-Cabrera, F.J. Ergonomic evaluation, with the RULA method, of greenhouse tasks of trellising crops. Work 2016, 54, 517–531. [Google Scholar] [CrossRef] [PubMed]
- Pérez-Alonso, J.; Carreño-Ortega, A.; Vázquez-Cabrera, F.J.; Callejón-Ferre, A.J. Accidents in the greenhouse-construction industry of SE Spain. Appl. Ergon. 2012, 43, 69–80. [Google Scholar] [CrossRef]
- Gázquez, J.C.; Meca, D.E.; Baeza, E.; Pérez, C.; García, R.; López, J.C. Evaluación de Tres Sistemas de Guiado para Tomate en Invernadero en Clima Cálido: Descuelgue Tradicional; Tradicional Intensivo y Perchas (Tipo Holandés); Actas Hortic: Almería, Spain, 2012. [Google Scholar]
- European Patent Application. Tutoring System for Greenhouse Cultivation. Available online: https://data.epo.org/publication-server/rest/v1.0/publication-dates/20161221/patents/EP3106026NWA1/document.pdf (accessed on 26 September 2024).
- Oliveira, L.F.P.; Moreira, A.P.; Silva, M.F. Advances in Agriculture Robotics: A State-of-the-Art Review and Challenges Ahead. Robotics 2021, 10, 52. [Google Scholar] [CrossRef]
- Ma, Y.; Feng, Q.; Sun, Y.; Guo, X.; Zhang, W.; Wang, B.; Chen, L. Optimized Design of Robotic Arm for Tomato Branch Pruning in Greenhouses. Agriculture 2024, 14, 359. [Google Scholar] [CrossRef]
- Grimstad, L.; Le, T.D.; From, J. A Novel Autonomous Robot for Greenhouse Applications. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 8270–8277. [Google Scholar]
- Vrochidou, E.; Tsakalidou, V.N.; Kalathas, I.; Gkrimpizis, T.; Pachidis, T.; Kaburlasos, V.G. An Overview of End Effectors in Agricultural Robotic Harvesting Systems. Agriculture 2022, 12, 1240. [Google Scholar] [CrossRef]
- Martinović, G.; Simon, J. Greenhouse microclimatic environment controlled by a mobile measuring station. NJAS—Wageningen J. Life Sci. 2014, 70–71, 61–70. [Google Scholar] [CrossRef]
- Garro, R.; Ordinez, L.; Alimenti, O. Design Patterns for Cyber-Physical Systems: The Case of a Robotic Greenhouse. In Proceedings of the 2011 Brazilian Symposium on Computing System Engineering, Florianopolis, Brazil, 7–11 November 2011; pp. 15–20. [Google Scholar]
- Garro, R.; Orozco, J.; Ordinez, L.; Santos, R. Estrategias de diseño basadas en patrones de un subsistema de movimiento para un robot pulverizador. In Proceedings of the 2014 IEEE Biennial Congress of Argentina (ARGENCON), Bariloche, Argentina, 11–13 June 2014; pp. 405–410. [Google Scholar]
- Mandow, A.; Gomez-de-Gabriel, J.M.; Martinez, J.L.; Munoz, V.F.; Ollero, A.; Garcia-Cerezo, A. The autonomous mobile robot AURORA for greenhouse operation. IEEE Robot. Autom. Mag. 1996, 3, 18–28. [Google Scholar] [CrossRef]
- González, R.; Rodríguez, F.; Sánchez-Hermosilla, J.; Donaire, J.G. Navigation Techniques for Mobile Robots in Greenhouses. Appl. Eng. Agric. 2009, 25, 153–165. [Google Scholar] [CrossRef]
- Sanchez-Hermosilla, J.; Rodriguez, F.; Gonzalez, R.; Luis, J.; Berenguel, M. A Mechatronic Description of an Autonomous Mobile Robot for Agricultural Tasks in Greenhouses. In Mobile Robots Navigation; InTech: London, UK, 2010. [Google Scholar] [CrossRef]
- Sánchez-Molina, J.A.; Rodríguez, F.; Moreno, J.C.; Sánchez-Hermosilla, J.; Giménez, A. Robotics in greenhouses. Scoping review. Comput. Electron. Agric. 2024, 219, 108750. [Google Scholar] [CrossRef]
- Darçın, E.S.; Darçın, M. Falling from a height injuries in Agriculture: A 8-year experience with 173 samples. Biomed. Res. 2016, 27, 825–828. [Google Scholar]
- Lopez-Aragon, L.; Lopez-Liria, R.; Callejon-Ferre, A.J.; Perez-Alonso, J. Musculoskeletal disorders of agricultural workers in the greenhouses of Almeria (Southeast Spain). Saf. Sci. 2018, 109, 219–235. [Google Scholar] [CrossRef]
- Gómez-Galán, M.; González-Parra, J.M.; Pérez-Alonso, J.; Golasi, I.; Callejón-Ferre, Á.J. Forced Postures in Courgette Greenhouse Workers. Agronomy 2019, 9, 253. [Google Scholar] [CrossRef]
- Junta de Andalucía. Estadística de accidents de trabajo en Andalucía. Instituto de Estadística y Cartografía de Andalucía. Available online: https://www.juntadeandalucia.es/institutodeestadisticaycartografia/badea/informe/anual?idNode=10302 (accessed on 5 January 2025).
- Wang, H.; Zhao, W.; Sun, W.; Liu, X.; Shi, R.; Zhang, H.; Chen, P.; Gao, K. The Design and Experimentation of a Wheeled-Chassis Potato Combine Harvester with Integrated Bagging and Ton Bag-Lifting Systems. Agriculture 2024, 14, 1461. [Google Scholar] [CrossRef]
- Torres-Moreno, J.L.; Cruz, N.C.; Álvarez, J.D.; Redondo, J.L.; Giménez-Fernandez, A. An open-source tool for path synthesis of four-bar mechanisms. Mech. Mach. Theory 2022, 169, 104604. [Google Scholar] [CrossRef]
- INSST. Instituto Nacional de Seguridad y Salud en el Trabajo. Evaluación de riesgos laborales. Available online: https://www.insst.es/documents/94886/96076/Evaluacion_riesgos.pdf/1371c8cb-7321-48c0-880b-611f6f380c1d (accessed on 2 October 2024).
- Ashby, M.F. Materials and the Environment: Eco-Informed Material Choice, 3rd ed.; Elsevier: Amsterdam, The Netherlands, 2012. [Google Scholar]
- Pan, C.S.; Chiou, S.S.; Hsiao, H.W.; Becker, P.; Akladios, M. Assessment of perceived traumatic injury hazards during drywall taping and sanding. Int. J. Ind. Ergon. 2000, 25, 621–631. [Google Scholar] [CrossRef]
- Pan, C.S.; Chiou, S.; Kau, T.Y.; Bhattacharya, A.; Ammons, D. Effects of foot placement on postural stability of construction workers on stilts. Appl. Ergon. 2009, 40, 781–789. [Google Scholar] [CrossRef]
- Chiou, S.; Pan, C.; Bhattacharya, A. Kinematics and kinetics of gait on stilts: Identification of risk factors associated with construction stilt use. Ergonomics 2008, 51, 1814–1829. [Google Scholar] [CrossRef]
- Wu, J.Z.; Chiou, S.S.; Pan, C.S. Analysis of Musculoskeletal Loadings in Lower Limbs During Stilts Walking in Occupational Activity. Ann. Biomed. Eng. 2009, 37, 1177–1189. [Google Scholar] [CrossRef]
- Smith, G.S.; Timmons, R.A.; Lombardi, D.A.; Mamidi, D.K.; Matz, S.; Courtney, T.K.; Perry, M.J. Work-related ladder fall fractures: Identification and diagnosis validation using narrative text. Accident Anal. Prev. 2006, 38, 973–980. [Google Scholar] [CrossRef]
- Sugama, A.; Ohnishi, A. Occupational accidents due to stepladders in Japan: Analysis of industry and injured characteristics. Procedia Manuf. 2015, 3, 6632–6638. [Google Scholar] [CrossRef]
- Ronk, C.J.; Dennerlein, J.T.; Hoffman, E.; Perry, M.J. Is Renovation Riskier Than New Construction? An Observational Comparison of Risk Factors for Stepladder-Related Falls. Am. J. Ind. Med. 2011, 54, 579–585. [Google Scholar] [CrossRef] [PubMed]
- Mattila, T.; Kaustell, K.; Rautiainen, R.; Pitkänen, T.; Lötjönen, T.; Suutarinen, J. Slip, trip and fall injuries in potato, sugar beet and open field vegetable production in Finland. Ergonomics 2008, 51, 1944–1959. [Google Scholar] [CrossRef] [PubMed]
- Solomon, C. Accidental injuries in agriculture in the UK. Occup. Med. 2022, 52, 461–466. [Google Scholar] [CrossRef] [PubMed]
- Ishimaru, T.; Arphorn, S.; Vudhironarit, C.; Thanachoksawang, C.; Theppitak, C.; Kiatkitroj, K.; Lertvarayut, T.; Manothum, A.; Hara, K. Effectiveness of Participatory Training for Prevention of Slips, Trips, and Falls: A Cluster Randomized Controlled Trial of Corn Farmers in Thailand. Asia-Pac. J. Public Health 2024, 36, 574–579. [Google Scholar] [CrossRef] [PubMed]
- Arphorn, S.; Ishimaru, T.; Lertvarayut, T.; Kiatkitroj, K.; Theppitak, C.; Manothum, A.; Hara, K. Risk Factors for Occupational Falls among Middle-aged and Elderly Farm Workers in Nan Province, Thailand. J. Agromed. 2022, 27, 402–408. [Google Scholar] [CrossRef]
- Warren, L.R.; Harley, S.; Dutschke, J.; van der Berg, A.; Dobbins, C. Bicycle helmet use to reduce the impact of head injuries in ladder users. ANZ J. Surg. 2017, 87, 1026–1029. [Google Scholar] [CrossRef]
- Blach, W.; Dobosz, D.; Gasienica-Walczak, B.; Grants, J.; Litwiniuk, A. Falls Are the Leading Cause of Injuries among Farmers-Limitations of Practicing Judo in Preventing These Incidents. Appl. Sci. 2021, 11, 7324. [Google Scholar] [CrossRef]
- International Labour Office (ILO). Safety and Health in Agriculture. Available online: https://www.ilo.org/sites/default/files/wcmsp5/groups/public/@ed_dialogue/@sector/documents/normativeinstrument/wcms_161135.pdf (accessed on 28 November 2024).
- Parmar, R.S.; Kamani, G.J.; Amin, B.A. Analysis of factorial experiments for agricultural research using digital tool. Gujarat J. Ext. Educ. 2022, 33. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).