1. Introduction
Data-Driven Control (DDC) algorithms have emerged as a powerful alternative to traditional Model-Based Control (MBC) techniques, particularly for systems characterized by nonlinearities, modeling challenges, or inaccessible models. Unlike MBC, which relies on mathematical models, DDC techniques derive their flexibility from their reliance solely on data acquired directly from the control system. By leveraging this data, DDC algorithms dynamically assess the behavior of the controlled process to achieve the desired objectives. The foundational work in this field includes the comprehensive survey by Hou [
1], with an updated version presented in [
2]. These surveys categorize DDC algorithms based on how data is processed (online or offline), the structure of the algorithm (fixed or unknown), and whether gradient calculations are employed during the control process. Gradient-based methods include Iterative Feedback Tuning (IFT) [
3], Iterative Learning Control (ILC) [
4], Noniterative Data-Driven Model Reference Control [
5], Virtual Reference Feedback Tuning (VRFT) [
6], and Model-Free Adaptive Control (MFAC) [
7]. Non-gradient methods, on the other hand, encompass Model-Free Control (MFC) [
8], Correlation-Based Tuning (CbT) [
9], and Unfalsification with Analytic Update [
10].
Model-Free methods, which rely exclusively on real-time data from the system, are primarily represented by two approaches: MFAC, introduced by Hou [
7], and MFC, developed by Fliess and Join [
8]. While both methods share some structural similarities, they differ fundamentally in their underlying principles. MFAC employs dynamic linearization and operates as a gradient-based method, whereas MFC utilizes an ultralocal model and is non-gradient-based. This paper seeks to clarify the distinctions between these two approaches and provide a detailed analysis of their application to nonlinear systems. The adaptive variant introduced by Hou in [
7] dynamically linearizes the plant using process data, with its complexity varying based on the volume of data utilized. This method has been successfully applied in diverse domains, including unmanned surface vessels in [
11], absorption refrigeration systems [
12], flying robots [
13], parafoil systems [
14], multivehicle systems with constraints [
15] and quadrotor formations [
16]. Beyond its standard implementation, MFAC has been integrated with other control techniques such as Iterative Feedback Tuning (IFT) [
17], Predictive Control (PC) [
18], Sliding Mode Control (SMC) [
19,
20], Iterative Learning Concept (ILC) [
21], Fault Tolerant Control (FTC) [
22], Virtual Reference Feedback Tuning (VFRT) [
23] or Error Minimized Regularized Online Sequential Extreme Learning Machine [
24]. The method is well-established, with [
7] providing stability analyses for all MFAC variants.
On the other hand, MFC has been applied in areas such as lateral vehicle control [
25], ramp metering [
26], variable-speed wind turbines [
27], quadrotors used for acrobatic flight [
28], machine tools [
29], and non-minimum phase systems and switched systems [
30]. Also, the MFC approach can be used together with other control techniques to be improved, such as in the case of SMC [
31], VRFT [
32] or IFT [
33], to enhance its performance. While MFC is relatively newer compared to MFAC, ongoing research, including [
34,
35], is addressing its theoretical foundations, particularly in stability analysis.
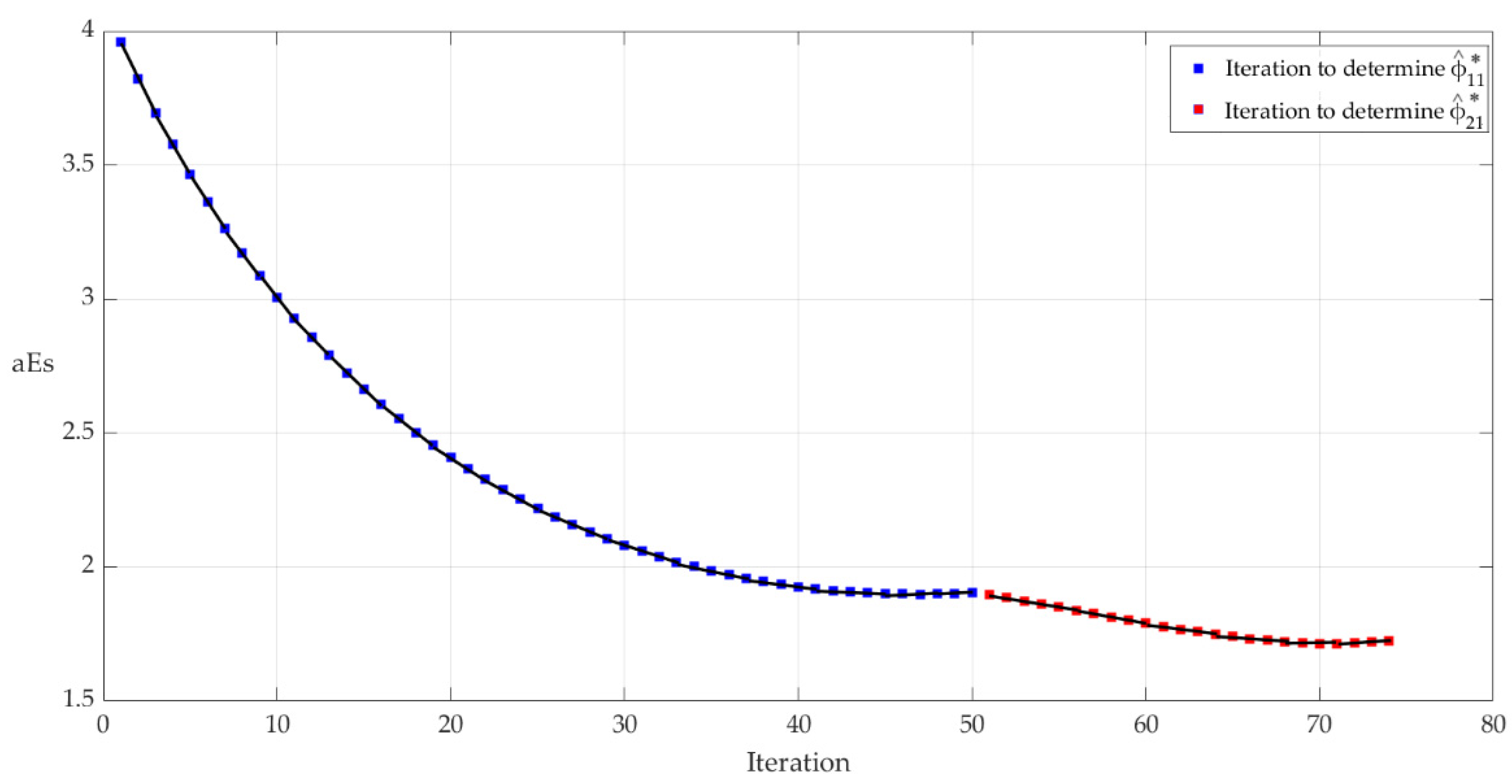
This paper conducts a comparative analysis of gradient-based (MFAC) and non-gradient-based (MFC) Model-Free methods. MFAC employs dynamic linearization techniques, such as the Compact Form Dynamic Linearization (CFDL) and Partial Form Dynamic Linearization (PFDL), which utilize pseudo partial derivatives (PPD) and pseudo gradients (PG), respectively. To optimize performance, two algorithms are introduced to determine the initial values of PPD and PG, addressing the influence of these parameters on system dynamics, as highlighted in [
36,
37]. These algorithms aim to minimize control errors and enhance the performance of CFDL and PFDL-based MFAC controllers across various applications. MFC, on the other hand, relies on intelligent PID (iPID) laws, which mimic classical PID behavior but operate without a plant model, using only system data. The iP and iPID algorithms, as described in [
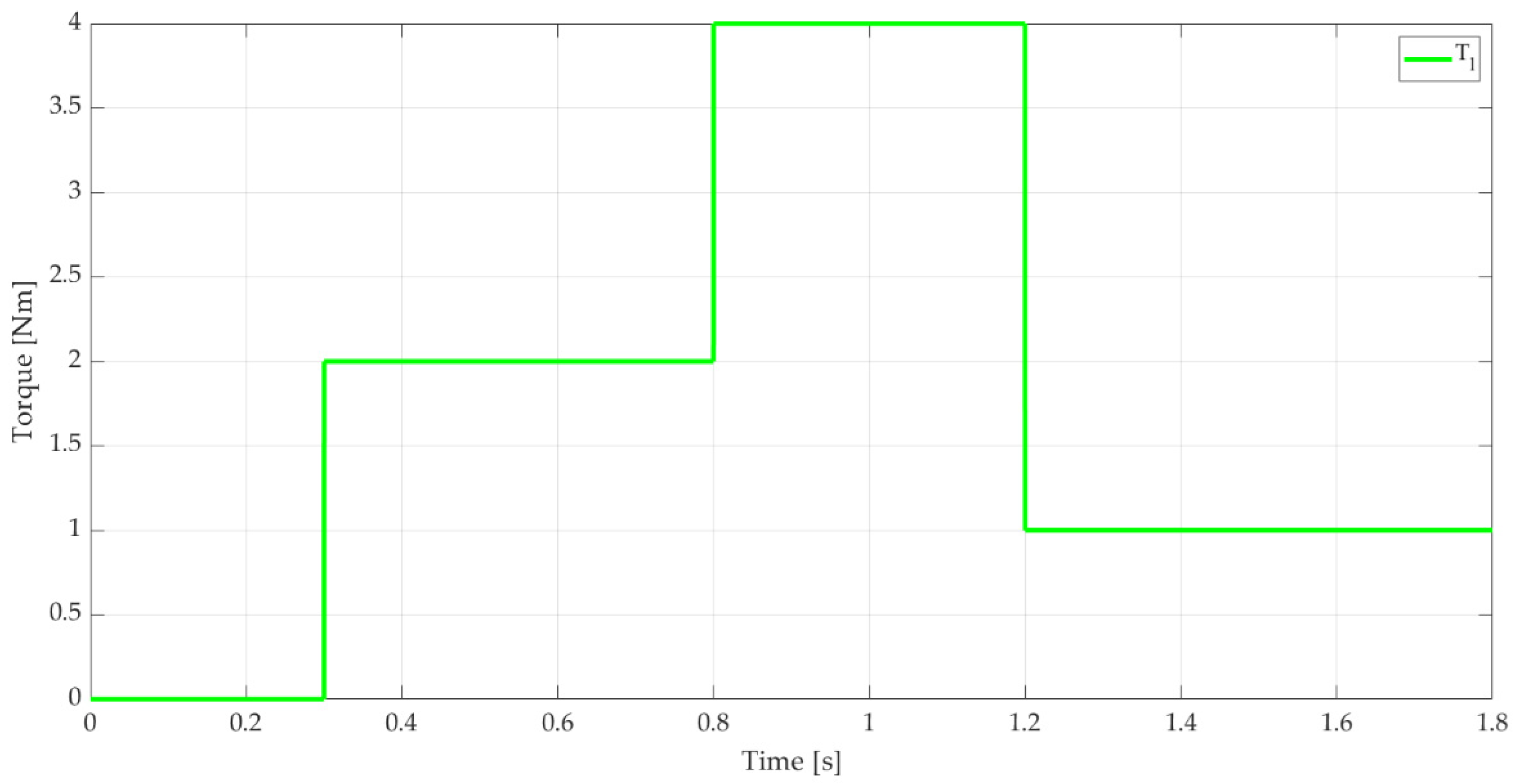
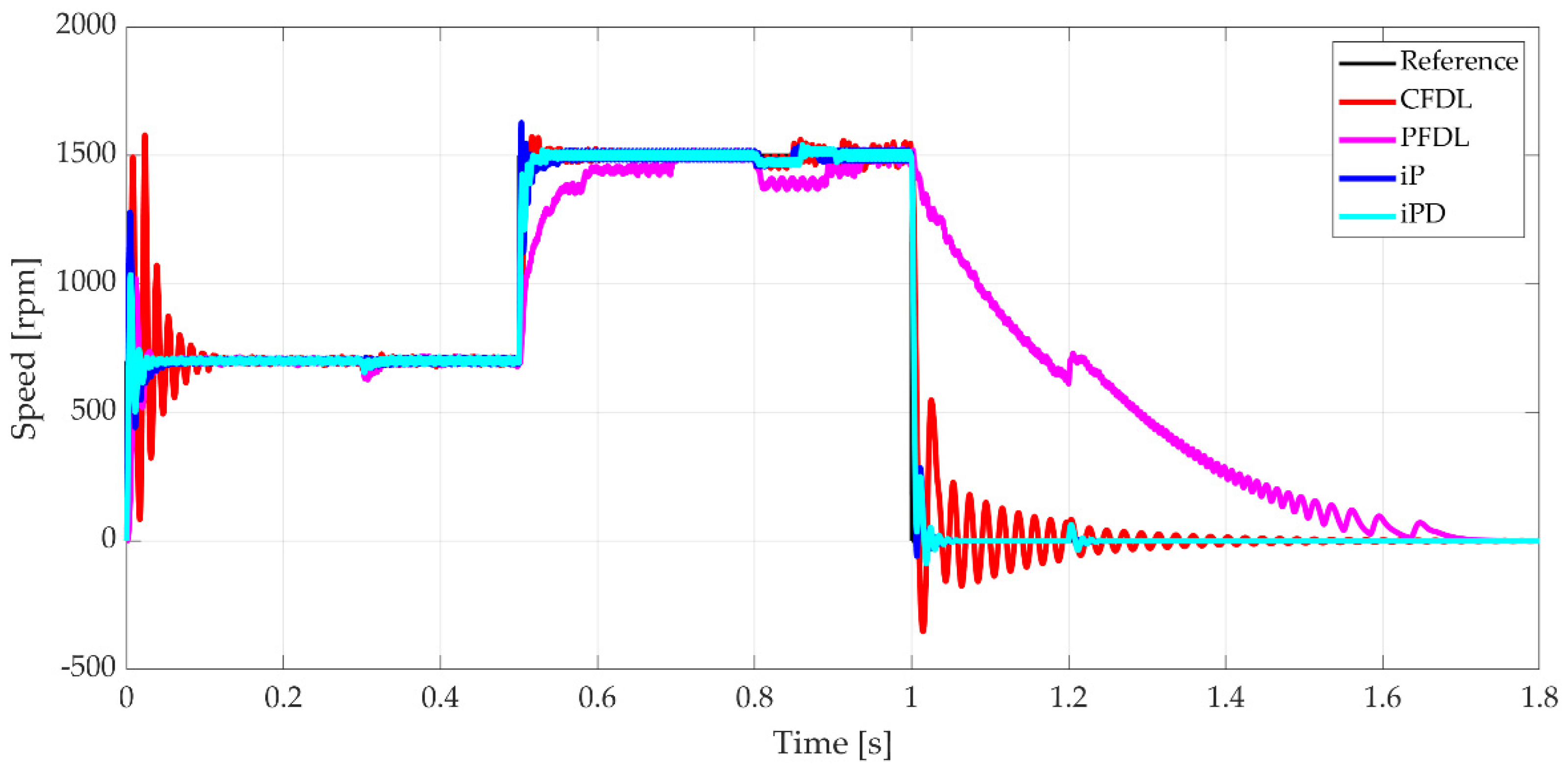
8], exhibit behavior akin to PI and PID controllers. Given the suitability of DDC methods for nonlinear systems, this paper applies the proposed algorithms to three such systems: a BLDC motor with nonlinear control elements, a non-minimum phase nonlinear system, and a nonlinear system with time-varying parameters. The analysis aims to evaluate the effectiveness of gradient and non-gradient approaches in these contexts.
Since DDC-type approaches are suitable for nonlinear systems, this paper proposes the application of the algorithms for obtaining the initial values for CFDL and PFDL, respectively the analysis between the gradient and non-gradient based methods, using three such systems. The first is represented by a BLDC motor, which has a control loop with nonlinear elements, the second is represented by a non-minimum phase nonlinear system, and the third is a nonlinear system with a time-varying parameter.
The main contributions of this paper are as follows.
Determining the initial value of PPD for the MFAC-CFDL law by obtaining the starting value for the time-varying parameter used in the control law equation.
Determining the initial value of PG for the MFAC-PFDL law by obtaining the starting values for the time-varying parameter used in the control law equation.
Testing and validation of algorithms for initial values of time-varying parameters in relation to preliminary laws that provide stable responses of control systems
Comparative analysis of the performance of systems controlled by gradient and non-gradient based methods applied to nonlinear systems.
The structure of the paper comprises a presentation of the two Model Free algorithms which are described in
Section 2, followed by the presentation of the nonlinear systems considered to be controlled, in
Section 3. In
Section 4, the algorithms for determining the optimized values for the PPD and PG are presented, with the results obtained by applying them to the plants mentioned in
Section 3. In the same section, the comparative results of the control using the analyzed Model Free methods are also presented. In
Section 5, the conclusions resulting from the comparative analysis and the usage of algorithms for determining the initial values for the PPD and PG are presented.
5. Conclusions
This paper conducted a comprehensive comparative analysis of two categories of Data-Driven Control (DDC) laws: gradient-based (MFAC) and non-gradient-based (MFC) approaches. For the gradient-based MFAC method, two algorithms were developed to determine the optimized initial values of the pseudo partial derivative (PPD) and pseudo gradient (PG) parameters. These algorithms, rooted in a data-driven philosophy, utilize system-acquired data to iteratively enhance system dynamics. When applied to three nonlinear systems, the algorithms demonstrated significant improvements in dynamic performance, validated through numerical evaluation criteria. A notable limitation, however, is their reliance on step-type reference signals, which are essential for capturing PPD and PG variations to derive optimized initial values.
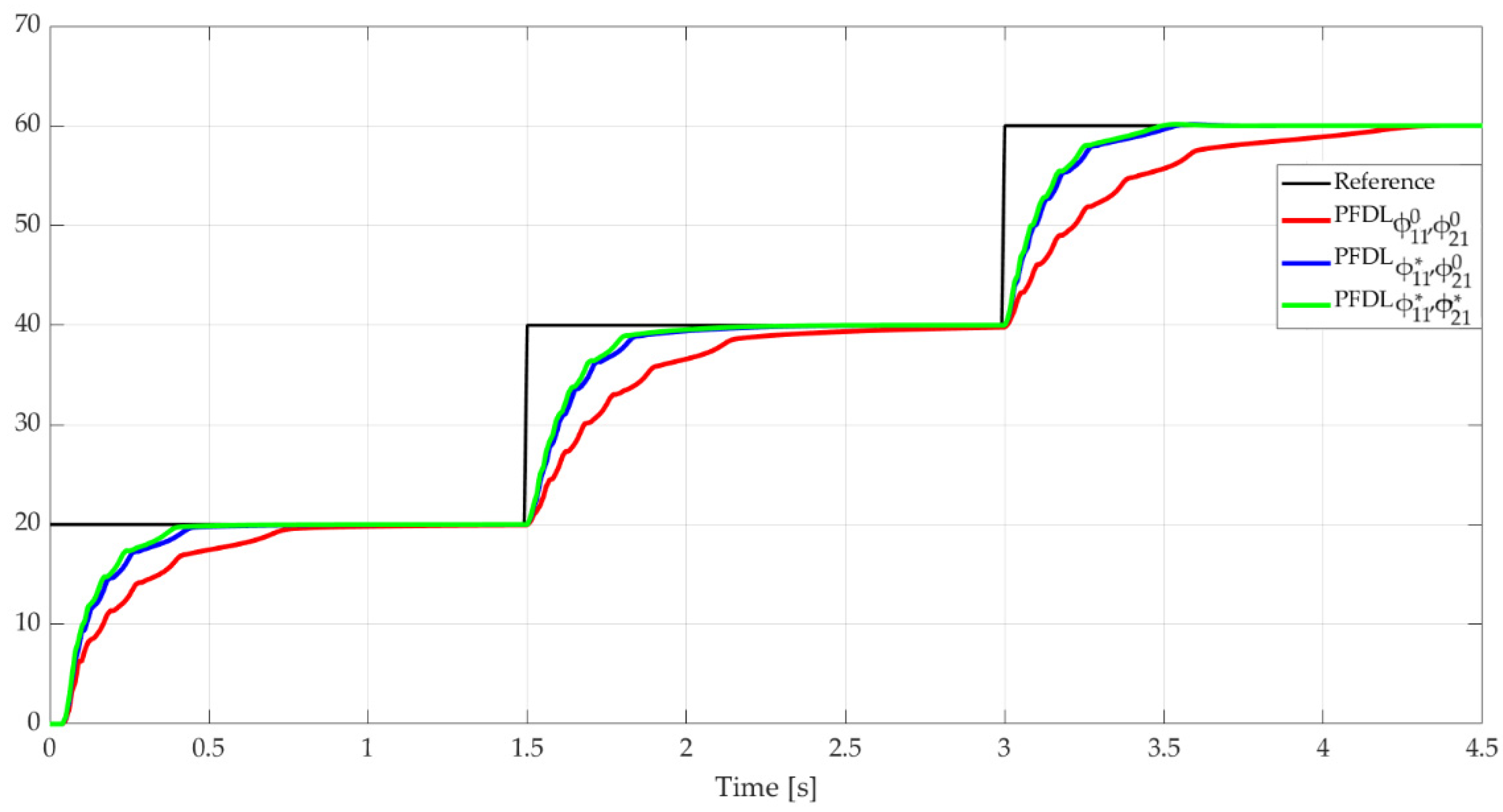
For the gradient-based approach, MFAC algorithms employing compact form dynamic linearization (CFDL) and partial form dynamic linearization (PFDL) were developed to optimize the initial values of time-varying parameters (PPD and PG), resulting in enhanced dynamic performance. On the other hand, the non-gradient-based MFC approach utilized intelligent proportional (iP) and intelligent proportional-derivative (iPD) controllers, which exhibit behavior analogous to classical PI and PID controllers. Both MFAC and MFC variants were tested and validated on nonlinear systems, enabling a direct performance comparison between the two methodologies.
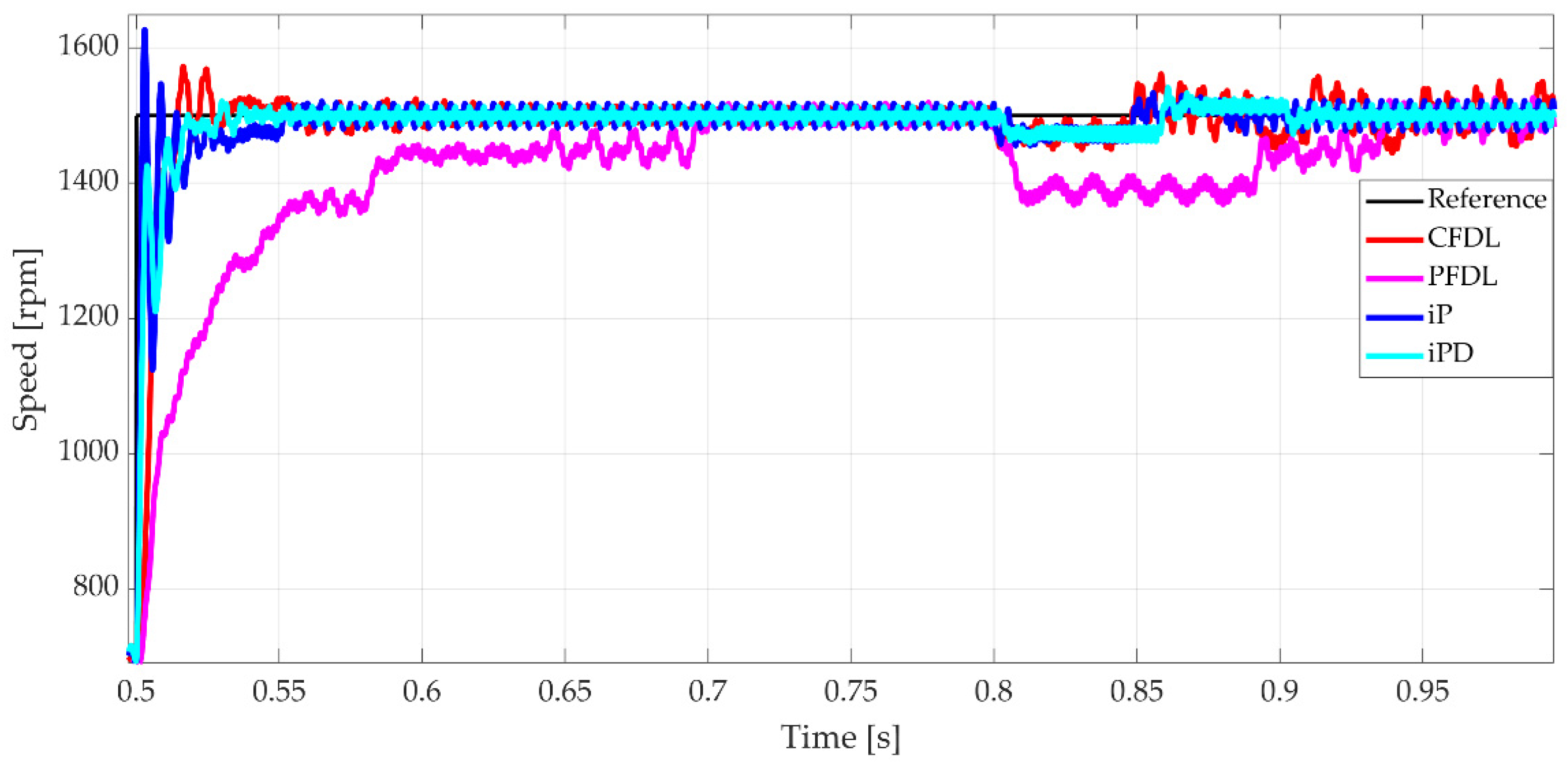
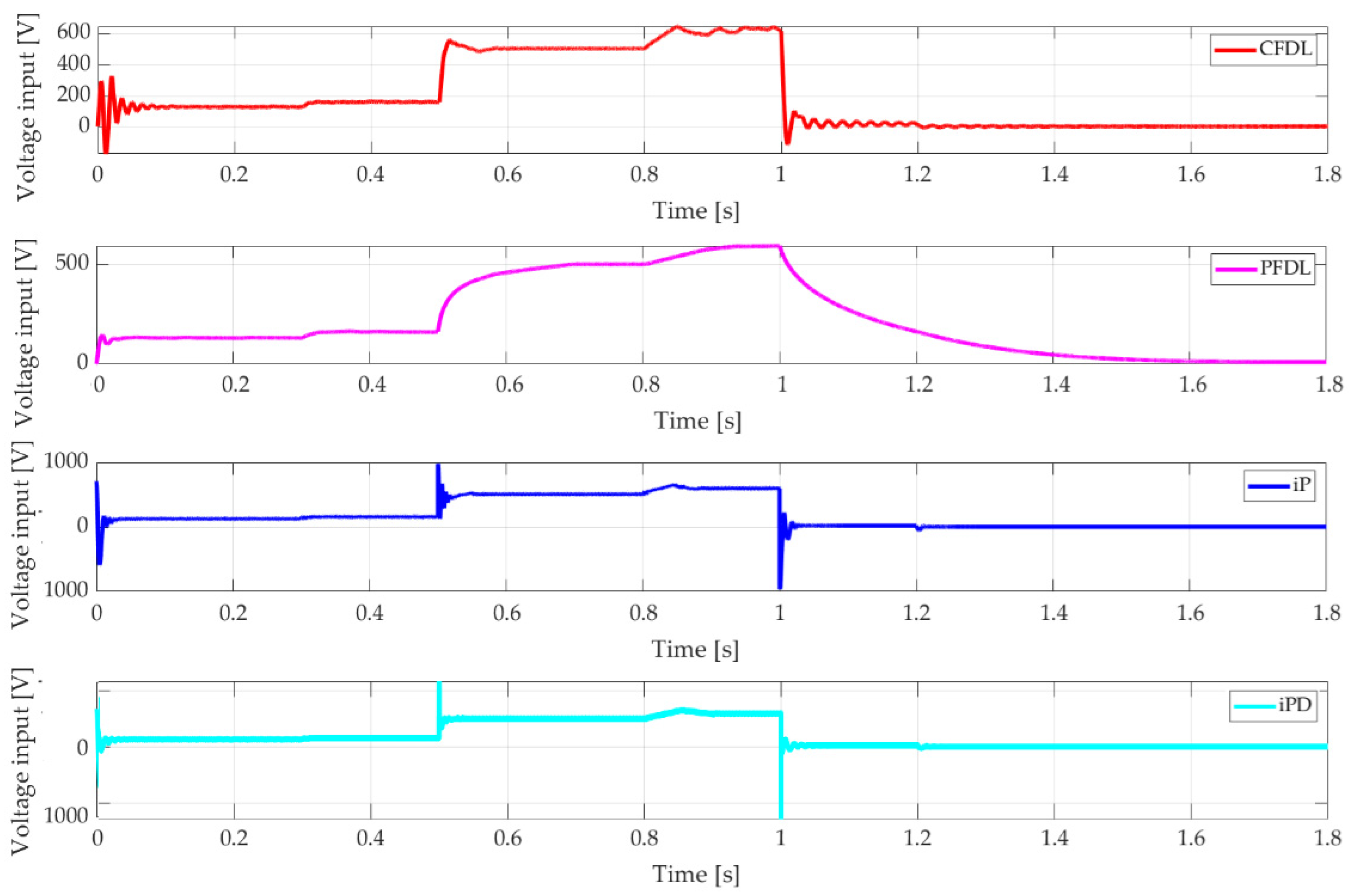
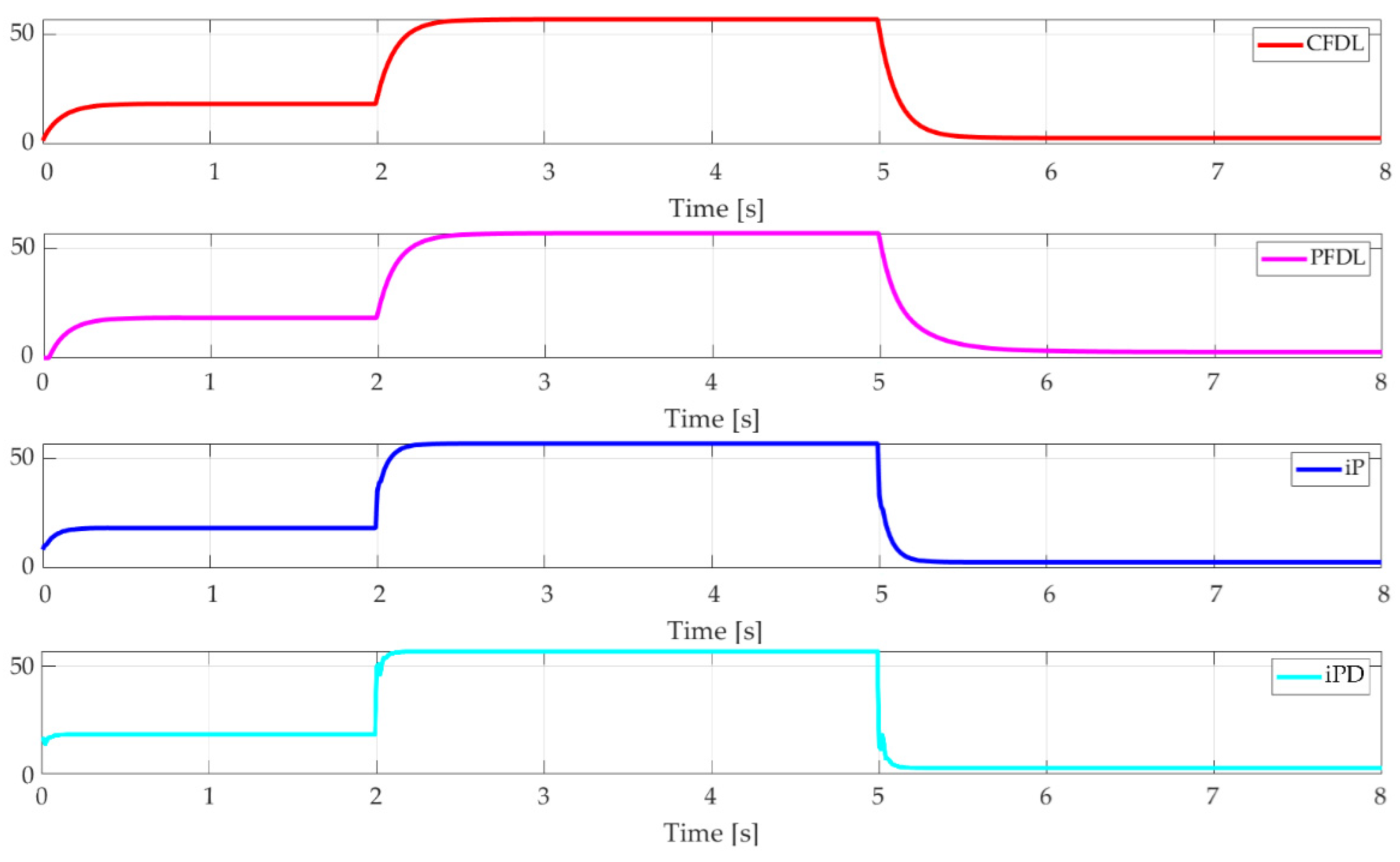
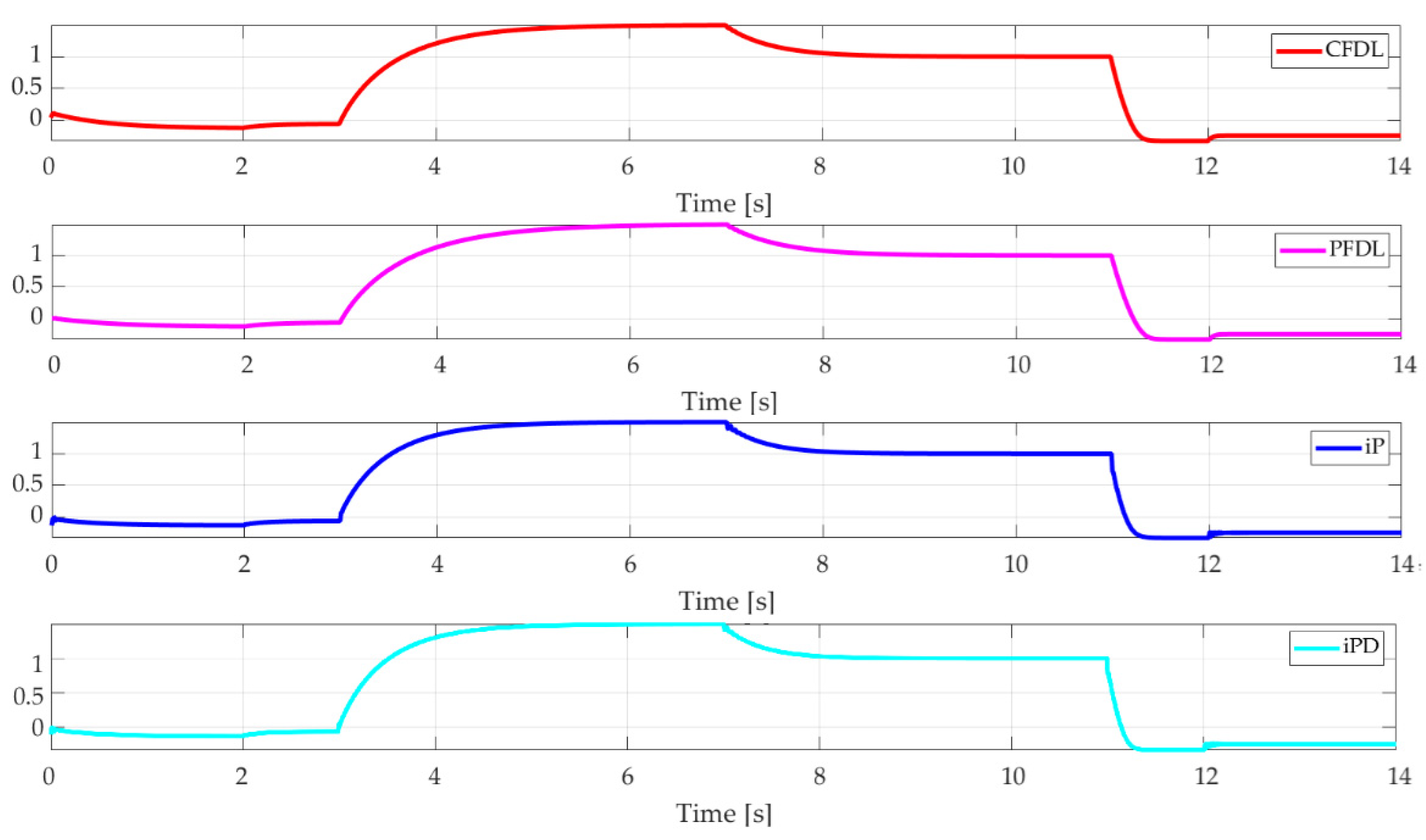
Regarding the comparative analysis between MFAC and MFC, the results clearly indicate that MFC algorithms outperform their MFAC counterparts. While MFAC algorithms, both in CFDL and PFDL forms, exhibited slower responses and higher control errors, MFC algorithms demonstrated faster settling times, reduced overshoot, and lowered control errors, as evidenced by the discrete-time integral absolute error criterion. Both approaches successfully achieved steady-state error, rejected disturbances, and adapted to time-varying nonlinear systems. However, MFC algorithms consistently achieved control objectives more efficiently and with greater consistency in settling times. In contrast, MFAC algorithms, despite their adaptability, proved less efficient under significant reference value changes and introduced vulnerabilities in system perception due to dynamic linearization. The ultralocal model used in MFC, on the other hand, emerged as a more robust solution for online system estimation.
As a future research direction, the study proposes expanding the comparative analysis to include a wider range of systems with varied dynamics. Additionally, further validation of the proposed algorithms on a larger number of systems is recommended to solidify their applicability and effectiveness across diverse control scenarios.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}