
Parallel Fin Ray Soft Gripper with Embedded Mechano-Optical Force Sensor
 , ,
, , 
Abstract
1. Introduction
2. State of the Art
3. Parallel Fin Ray Soft Gripper Design
Manufacturing
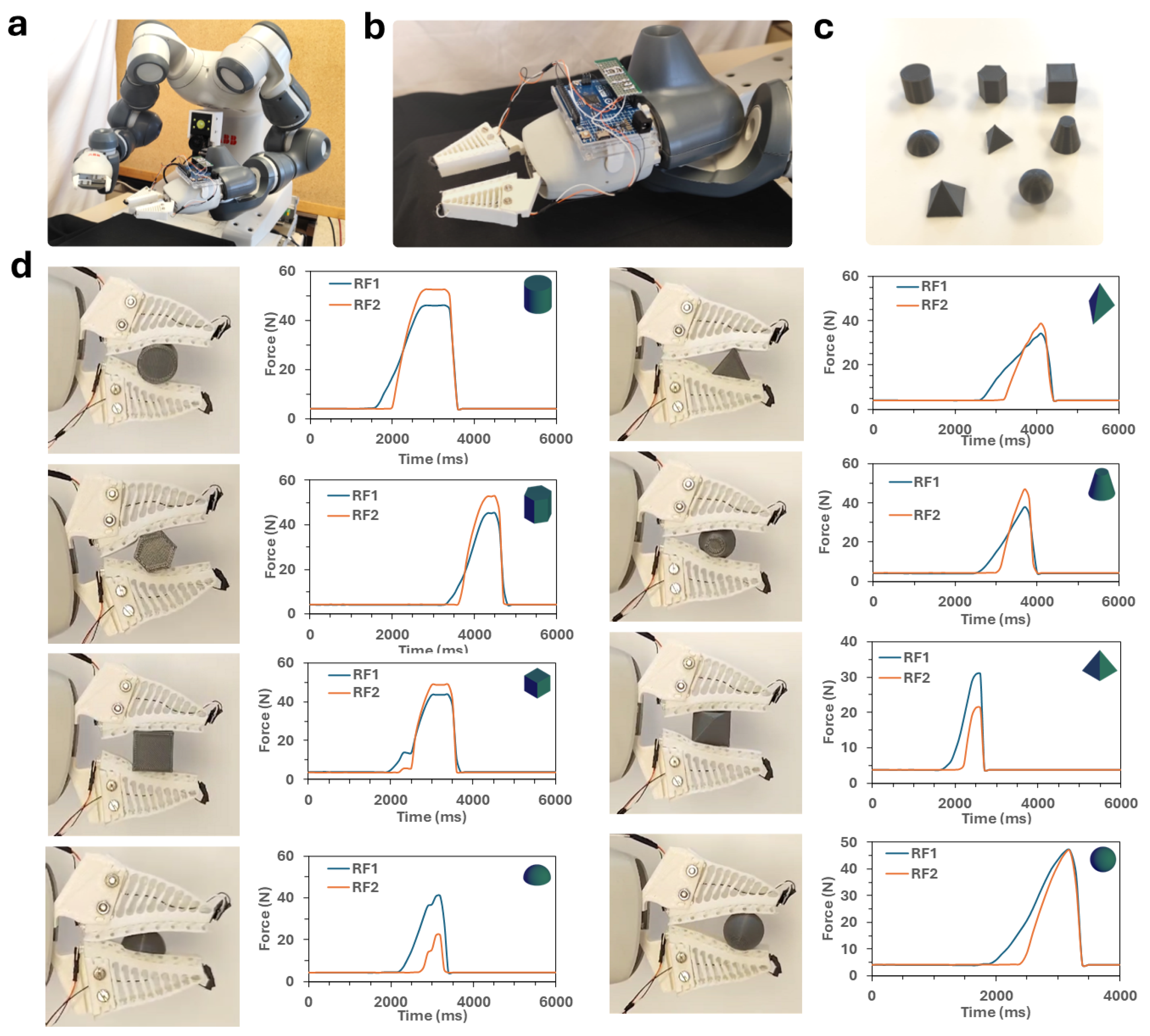
4. Characterization and Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Soft Robotics, Inc. Finger Gripper mGrip. 2024. Available online: https://www.softroboticsinc.com (accessed on 28 October 2024).
- OnRobot. Soft Gripper. 2024. Available online: https://www.onrobot.com (accessed on 28 October 2024).
- Rochu Soft Robotic Gripper Group. Soft Robotic Gripper Beak. 2024. Available online: https://www.softroboticgripper.com (accessed on 28 October 2024).
- The Gripper Company. The Four Fingers Lip. 2024. Available online: https://www.thegrippercompany.com (accessed on 28 October 2024).
- Blanes, C.; Mellado, M.; Ortiz, C.; Valera, A. Technologies for robot grippers in pick and place operations for fresh fruits and vegetables. Span. J. Agric. Res. 2011, 9, 1130–1141. [Google Scholar] [CrossRef]
- Roche, E.T.; Horvath, M.A.; Wamala, I.; Alazmani, A.; Song, S.E.; Whyte, W.; Machaidze, Z.; Payne, C.J.; Weaver, J.C.; Fishbein, G.; et al. Soft robotic sleeve supports heart function. Sci. Transl. Med. 2017, 9, eaaf3925. [Google Scholar] [CrossRef] [PubMed]
- Cianchetti, M.; Laschi, C.; Menciassi, A.; Dario, P. Biomedical applications of soft robotics. Nat. Rev. Mater. 2018, 3, 143–153. [Google Scholar] [CrossRef]
- Navas, E.; Fernández, R.; Sepúlveda, D.; Armada, M.; Gonzalez-de Santos, P. Soft Grippers for Automatic Crop Harvesting: A Review. Sensors 2021, 21, 2689. [Google Scholar] [CrossRef]
- Galloway, K.C.; Becker, K.P.; Phillips, B.; Kirby, J.; Licht, S.; Tchernov, D.; Wood, R.J.; Gruber, D.F. Soft robotic grippers for biological sampling on deep reefs. Soft Robot. 2016, 3, 23–33. [Google Scholar] [CrossRef]
- Navas, E.; Fernández, R.; Armada, M.; Gonzalez-de Santos, P. Diaphragm-type pneumatic-driven soft grippers for precision harvesting. Agronomy 2021, 11, 1727. [Google Scholar] [CrossRef]
- Navas, E.; Shamshiri, R.R.; Dworak, V.; Weltzien, C.; Fernández, R. Soft gripper for small fruits harvesting and pick and place operations. Front. Robot. AI 2024, 10, 1330496. [Google Scholar] [CrossRef]
- Elfferich, J.F.; Shahabi, E.; Santina, C.D.; Dodou, D. BerryTwist: A Twisting-Tube Soft Robotic Gripper for Blackberry Harvesting. IEEE Robot. Autom. Lett. 2025, 10, 429–435. [Google Scholar] [CrossRef]
- Xie, Z.; Domel, A.G.; An, N.; Green, C.; Gong, Z.; Wang, T.; Knubben, E.M.; Weaver, J.C.; Bertoldi, K.; Wen, L. Octopus arm-inspired tapered soft actuators with suckers for improved grasping. Soft Robot. 2020, 7, 639–648. [Google Scholar] [CrossRef]
- Pi, J.; Liu, J.; Zhou, K.; Qian, M. An octopus-inspired bionic flexible gripper for apple grasping. Agriculture 2021, 11, 1014. [Google Scholar] [CrossRef]
- Glick, P.; Suresh, S.A.; Ruffatto, D.; Cutkosky, M.; Tolley, M.T.; Parness, A. A soft robotic gripper with gecko-inspired adhesive. IEEE Robot. Autom. Lett. 2018, 3, 903–910. [Google Scholar] [CrossRef]
- Seibel, A.; Yıldız, M.; Zorlubaş, B. A Gecko-Inspired Soft Passive Gripper. Biomimetics 2020, 5, 12. [Google Scholar] [CrossRef]
- Wang, H.; Totaro, M.; Beccai, L. Toward perceptive soft robots: Progress and challenges. Adv. Sci. 2018, 5, 1800541. [Google Scholar] [CrossRef] [PubMed]
- Yumbla, E.Q.; Qiao, Z.; Tao, W.; Zhang, W. Human assistance and augmentation with wearable soft robotics: A literature review and perspectives. Curr. Robot. Rep. 2021, 2, 399–413. [Google Scholar] [CrossRef]
- Kim, Y.; Zhao, X. Magnetic soft materials and robots. Chem. Rev. 2022, 122, 5317–5364. [Google Scholar] [CrossRef]
- Bobinger, M.; Haider, M.; Goliya, Y.; Albrecht, A.; Becherer, M.; Lugli, P.; Rivadeneyra, A.; Russer, J. On the sintering of solution-based silver nanoparticle thin-films for sprayed and flexible antennas. Nanotechnology 2018, 29, 485701. [Google Scholar] [CrossRef]
- Ye, X.; Tian, M.; Li, M.; Wang, H.; Shi, Y. All-fabric-based flexible capacitive sensors with pressure detection and non-contact instruction capability. Coatings 2022, 12, 302. [Google Scholar] [CrossRef]
- Basson, C.I.; Bright, G.; Walker, A.J. Validating object conformity through geometric considerations of gripper mechanisms. In Proceedings of the 2017 24th International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Auckland, New Zealand, 21–23 November 2017; pp. 1–6. [Google Scholar]
- Festo. MultiChoiceGripper. 2025. Available online: https://www.festo.com/tw/en/e/about-festo/research-and-development/bionic-learning-network/highlights-from-2013-to-2014/multichoicegripper-id_33524/ (accessed on 11 January 2025).
- Shin, J.H.; Park, J.G.; Kim, D.I.; Yoon, H.S. A universal soft gripper with the optimized fin ray finger. Int. J. Precis. Eng. Manuf.-Green Technol. 2021, 8, 889–899. [Google Scholar] [CrossRef]
- Crooks, W.; Vukasin, G.; O’Sullivan, M.; Messner, W.; Rogers, C. Fin ray® effect inspired soft robotic gripper: From the robosoft grand challenge toward optimization. Front. Robot. AI 2016, 3, 70. [Google Scholar] [CrossRef]
- Yang, Y.; Jin, K.; Zhu, H.; Song, G.; Lu, H.; Kang, L. A 3D-printed fin ray effect inspired soft robotic gripper with force feedback. Micromachines 2021, 12, 1141. [Google Scholar] [CrossRef]
- Shintake, J.; Cacucciolo, V.; Floreano, D.; Shea, H. Soft robotic grippers. Adv. Mater. 2018, 30, 1707035. [Google Scholar] [CrossRef] [PubMed]
- Manti, M.; Cacucciolo, V.; Cianchetti, M. Stiffening in soft robotics: A review of the state of the art. IEEE Robot. Autom. Mag. 2016, 23, 93–106. [Google Scholar] [CrossRef]
- Shih, B.; Mayeda, J.; Huo, Z.; Christianson, C.; Tolley, M.T. 3D printed resistive soft sensors. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; pp. 152–157. [Google Scholar]
- Vogt, D.; Menguc, Y.; Park, Y.L.; Wehner, M.; Kramer, R.; Majidi, C.; Jentoft, L.; Tenzer, Y.; Howe, R.; Wood, R.J. Progress in soft, flexible, and stretchable sensing systems. In Proceedings of the International Workshop on Research Frontiers in Electronics Skin Technology at ICRA, Karlsruhe, Germany, 6–10 May 2013; Volume 13. [Google Scholar]
- Sirithunge, C.; Wang, H.; Iida, F. Soft touchless sensors and touchless sensing for soft robots. Front. Robot. AI 2024, 11, 1224216. [Google Scholar] [CrossRef]
- Zhao, H.; O’brien, K.; Li, S.; Shepherd, R.F. Optoelectronically innervated soft prosthetic hand via stretchable optical waveguides. Sci. Robot. 2016, 1, eaai7529. [Google Scholar] [CrossRef]
- To, C.; Hellebrekers, T.; Jung, J.; Yoon, S.J.; Park, Y.L. A soft optical waveguide coupled with fiber optics for dynamic pressure and strain sensing. IEEE Robot. Autom. Lett. 2018, 3, 3821–3827. [Google Scholar] [CrossRef]
- Chen, B.; Suo, Z. Optoionic sensing. Small 2022, 18, 2103882. [Google Scholar] [CrossRef]
- Ren, Z.; Hu, W.; Dong, X.; Sitti, M. Multi-functional soft-bodied jellyfish-like swimming. Nat. Commun. 2019, 10, 2703. [Google Scholar] [CrossRef]
- Gu, H.; Boehler, Q.; Cui, H.; Secchi, E.; Savorana, G.; De Marco, C.; Gervasoni, S.; Peyron, Q.; Huang, T.Y.; Pane, S.; et al. Magnetic cilia carpets with programmable metachronal waves. Nat. Commun. 2020, 11, 2637. [Google Scholar] [CrossRef]
- Ogata, M.; Sugiura, Y.; Makino, Y.; Inami, M.; Imai, M. SenSkin: Adapting skin as a soft interface. In Proceedings of the 26th Annual ACM Symposium on User Interface Software and Technology, St. Andrews, UK, 8–11 October 2013; pp. 539–544. [Google Scholar]
- Gao, Y.; Song, J.; Li, S.; Elowsky, C.; Zhou, Y.; Ducharme, S.; Chen, Y.M.; Zhou, Q.; Tan, L. Hydrogel microphones for stealthy underwater listening. Nat. Commun. 2016, 7, 12316. [Google Scholar] [CrossRef]
- Kang, S.; Cho, S.; Shanker, R.; Lee, H.; Park, J.; Um, D.S.; Lee, Y.; Ko, H. Transparent and conductive nanomembranes with orthogonal silver nanowire arrays for skin-attachable loudspeakers and microphones. Sci. Adv. 2018, 4, eaas8772. [Google Scholar] [CrossRef]
- Dong, Y.; Wang, L.; Xia, N.; Yang, Z.; Zhang, C.; Pan, C.; Jin, D.; Zhang, J.; Majidi, C.; Zhang, L. Untethered small-scale magnetic soft robot with programmable magnetization and integrated multifunctional modules. Sci. Adv. 2022, 8, eabn8932. [Google Scholar] [CrossRef] [PubMed]
- Cao, L.; Li, X.; Qin, L.; Kang, S.Z.; Li, G. Graphene quantum dots supported by graphene oxide as a sensitive fluorescence nanosensor for cytochrome c detection and intracellular imaging. J. Mater. Chem. B 2017, 5, 6300–6306. [Google Scholar] [CrossRef] [PubMed]
- Ham, J.; Han, A.K.; Cutkosky, M.R.; Bao, Z. UV-laser-machined stretchable multi-modal sensor network for soft robot interaction. NPJ Flex. Electron. 2022, 6, 94. [Google Scholar] [CrossRef]
- Ma, Y.; Liu, N.; Li, L.; Hu, X.; Zou, Z.; Wang, J.; Luo, S.; Gao, Y. A highly flexible and sensitive piezoresistive sensor based on MXene with greatly changed interlayer distances. Nat. Commun. 2017, 8, 1207. [Google Scholar] [CrossRef]
- Zhou, X.; Parida, K.; Halevi, O.; Magdassi, S.; Lee, P.S. All 3D printed stretchable piezoelectric nanogenerator for self-powered sensor application. Sensors 2020, 20, 6748. [Google Scholar] [CrossRef]
- Mandil, W.; Rajendran, V.; Nazari, K.; Ghalamzan-Esfahani, A. Tactile-sensing technologies: Trends, challenges and outlook in agri-food manipulation. Sensors 2023, 23, 7362. [Google Scholar] [CrossRef]
- Campanella, C.E.; Cuccovillo, A.; Campanella, C.; Yurt, A.; Passaro, V.M. Fibre Bragg grating based strain sensors: Review of technology and applications. Sensors 2018, 18, 3115. [Google Scholar] [CrossRef]
- Yuan, W.; Dong, S.; Adelson, E.H. Gelsight: High-resolution robot tactile sensors for estimating geometry and force. Sensors 2017, 17, 2762. [Google Scholar] [CrossRef]
- Khamis, H.; Xia, B.; Redmond, S.J. A novel optical 3D force and displacement sensor–Towards instrumenting the PapillArray tactile sensor. Sens. Actuators A Phys. 2019, 291, 174–187. [Google Scholar] [CrossRef]
- Hegde, C.; Mysa, R.C.; Chooi, A.; Dontu, S.; Tan, J.M.R.; Wong, L.H.; Alvarado, P.V.y.; Magdassi, S. 3D-Printed Mechano-Optic Force Sensor for Soft Robotic Gripper Enabled by Programmable Structural Metamaterials. Adv. Intell. Syst. 2024, 6, 2400057. [Google Scholar] [CrossRef]
- Hosale, M.; Kievid, C. Modulating territories, penetrating boundaries. Footprint 2010, 55–68. [Google Scholar] [CrossRef]
- Rodríguez-Nieto, D.; Ojeda, M.; Navas, E.; Fernández, R. Arquitectura Software para el Sistema robótico de Manipulación dual Hortirobot. Rev. Iberoam. De Automática E Informática Ind. 2024, 21, 274–285. [Google Scholar]
- ABB Robotics. YuMi Dual-Arm Collaborative Robot. 2024. Available online: https://new.abb.com/products/robotics/robots/collaborative-robots/yumi/dual-arm (accessed on 14 October 2024).
- Shen, Z.; Zhang, Z.; Zhang, N.; Li, J.; Zhou, P.; Hu, F.; Rong, Y.; Lu, B.; Gu, G. High-stretchability, ultralow-hysteresis conductingpolymer hydrogel strain sensors for soft machines. Adv. Mater. 2022, 34, 2203650. [Google Scholar] [CrossRef]
- Truby, R.L.; Wehner, M.; Grosskopf, A.K.; Vogt, D.M.; Uzel, S.G.; Wood, R.J.; Lewis, J.A. Soft somatosensitive actuators via embedded 3D printing. Adv. Mater. 2018, 30, 1706383. [Google Scholar] [CrossRef]
- Aksoy, B.; Hao, Y.; Grasso, G.; Digumarti, K.M.; Cacucciolo, V.; Shea, H. Shielded soft force sensors. Nat. Commun. 2022, 13, 4649. [Google Scholar] [CrossRef]
- Subad, R.A.S.I.; Saikot, M.M.H.; Park, K. Soft multi-directional force sensor for underwater robotic application. Sensors 2022, 22, 3850. [Google Scholar] [CrossRef]
- Singh, D.; Tawk, C.; Mutlu, R.; Sariyildiz, E.; Sencadas, V.; Alici, G. A 3d printed soft force sensor for soft haptics. In Proceedings of the 2020 3rd IEEE International Conference on Soft Robotics (RoboSoft), New Haven, CT, USA, 15 May–15 July 2020; pp. 458–463. [Google Scholar]
- Noda, K.; Matsumoto, K.; Shimoyama, I. Stretchable tri-axis force sensor using conductive liquid. Sens. Actuators A Phys. 2014, 215, 123–129. [Google Scholar] [CrossRef]
- Bian, J.; Wang, N.; Ma, J.; Jie, Y.; Zou, J.; Cao, X. Stretchable 3D polymer for simultaneously mechanical energy harvesting and biomimetic force sensing. Nano Energy 2018, 47, 442–450. [Google Scholar] [CrossRef]
- Liu, H.; Li, M.; Ouyang, C.; Lu, T.J.; Li, F.; Xu, F. Biofriendly, stretchable, and reusable hydrogel electronics as wearable force sensors. Small 2018, 14, 1801711. [Google Scholar] [CrossRef]
- Emon, O.F.; Sun, H.; Rahim, A.; Choi, J.W. An Ionic Liquid-Based Stretchable Sensor for Measuring Normal and Shear Force. Soft Robot. 2023, 10, 1115–1125. [Google Scholar] [CrossRef]
- Tham, N.C.Y.; Sahoo, P.K.; Kim, Y.; Hegde, C.; Lee, S.W.; Kim, Y.J.; Murukeshan, V.M. Thermally controlled localized porous graphene for integrated graphene-paper electronics. Adv. Mater. Technol. 2021, 6, 2001156. [Google Scholar] [CrossRef]
- Zou, J.; Zhang, M.; Huang, J.; Bian, J.; Jie, Y.; Willander, M.; Cao, X.; Wang, N.; Wang, Z.L. Coupled supercapacitor and triboelectric nanogenerator boost biomimetic pressure sensor. Adv. Energy Mater. 2018, 8, 1702671. [Google Scholar] [CrossRef]
- Yamaguchi, T.; Kashiwagi, T.; Arie, T.; Akita, S.; Takei, K. Human-like electronic skin-integrated soft robotic hand. Adv. Intell. Syst. 2019, 1, 1900018. [Google Scholar] [CrossRef]
- Chen, G.; Matsuhisa, N.; Liu, Z.; Qi, D.; Cai, P.; Jiang, Y.; Wan, C.; Cui, Y.; Leow, W.R.; Liu, Z.; et al. Plasticizing silk protein for on-skin stretchable electrodes. Adv. Mater. 2018, 30, 1800129. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | TPE Value | PLA Value | Unit |
|---|---|---|---|
| Nozzle diameter | 0.4 | 0.4 | mm |
| Layer height | 0.2 | 0.2 | mm |
| Infill | 100 | 20 | % |
| Material temp | 225 | 200 | °C |
| Build plate temp | 50 | 50 | °C |
| Print speed | 20 | 50 | mm/s |
| Extrusion multiplier | 115 | 100 | % |
| Sensor | Type of Sensing | Fabrication Steps | Sensitivity | Linearity () | Durability (Cycles) | Operation Range |
|---|---|---|---|---|---|---|
| Mechano-optic sensor | Mechanical deformation- induced optical intensity modulation | 1 | 0.16 N | 10 000 | 0–150 N | |
| Optoelectronic [32] | Stretchable optical waveguide | >8 | 0.4 N dB | - | - | 20 N |
| Polymer hydrogel sensor [53] | Variation in resistance of the hydrogel under strain | >10 | Deformation of 12 m | 2000 | 300% strain | |
| Somato-sensor [54] | Resistive sensor | >4 | - | - | - | 80 kPa |
| Shielded liquid metal silicone sensor [55] | Capacitive | >15 | 0.003 N | - | 1000 | >20 N |
| Multi-direction flex sensor [56] | Resistive | >5 | - | - | <100 | 5 N |
| 3D printed haptic sensor [57] | Resistive | >3 | - | - | 0–13 N | |
| Triaxial force sensor [58] | Capacitive | >8 | 0.0074 N | 0.93–0.98 | - | 0–0.25 N |
| Triboelectric nanogenerator pressure sensor [59] | Triboelectric nanogenerator | >8 | 12.61 pF· kPa−1 | - | 5 kPa | |
| Ultrastretchable hydrogel sensor [60] | Resistive sensor using liquid metal | >10 | 0.25 kPa | - | 1000 | 150 kPa |
| Ionic liquid-based force sensor [61] | Resistance change in ionic liquid | >10 | - | - | - | 12 N |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Navas, E.; Rodríguez-Nieto, D.; Rodríguez-González, A.A.; Fernández, R. Parallel Fin Ray Soft Gripper with Embedded Mechano-Optical Force Sensor. Appl. Sci. 2025, 15, 2576. https://doi.org/10.3390/app15052576
Navas E, Rodríguez-Nieto D, Rodríguez-González AA, Fernández R. Parallel Fin Ray Soft Gripper with Embedded Mechano-Optical Force Sensor. Applied Sciences. 2025; 15(5):2576. https://doi.org/10.3390/app15052576
Chicago/Turabian StyleNavas, Eduardo, Daniel Rodríguez-Nieto, Alain Antonio Rodríguez-González, and Roemi Fernández. 2025. "Parallel Fin Ray Soft Gripper with Embedded Mechano-Optical Force Sensor" Applied Sciences 15, no. 5: 2576. https://doi.org/10.3390/app15052576
APA StyleNavas, E., Rodríguez-Nieto, D., Rodríguez-González, A. A., & Fernández, R. (2025). Parallel Fin Ray Soft Gripper with Embedded Mechano-Optical Force Sensor. Applied Sciences, 15(5), 2576. https://doi.org/10.3390/app15052576