
The Establishment and Evaluation Model of the Thematic Deep-Learning Teaching Module


Abstract
1. Introduction
2. Preliminaries
3. Methods
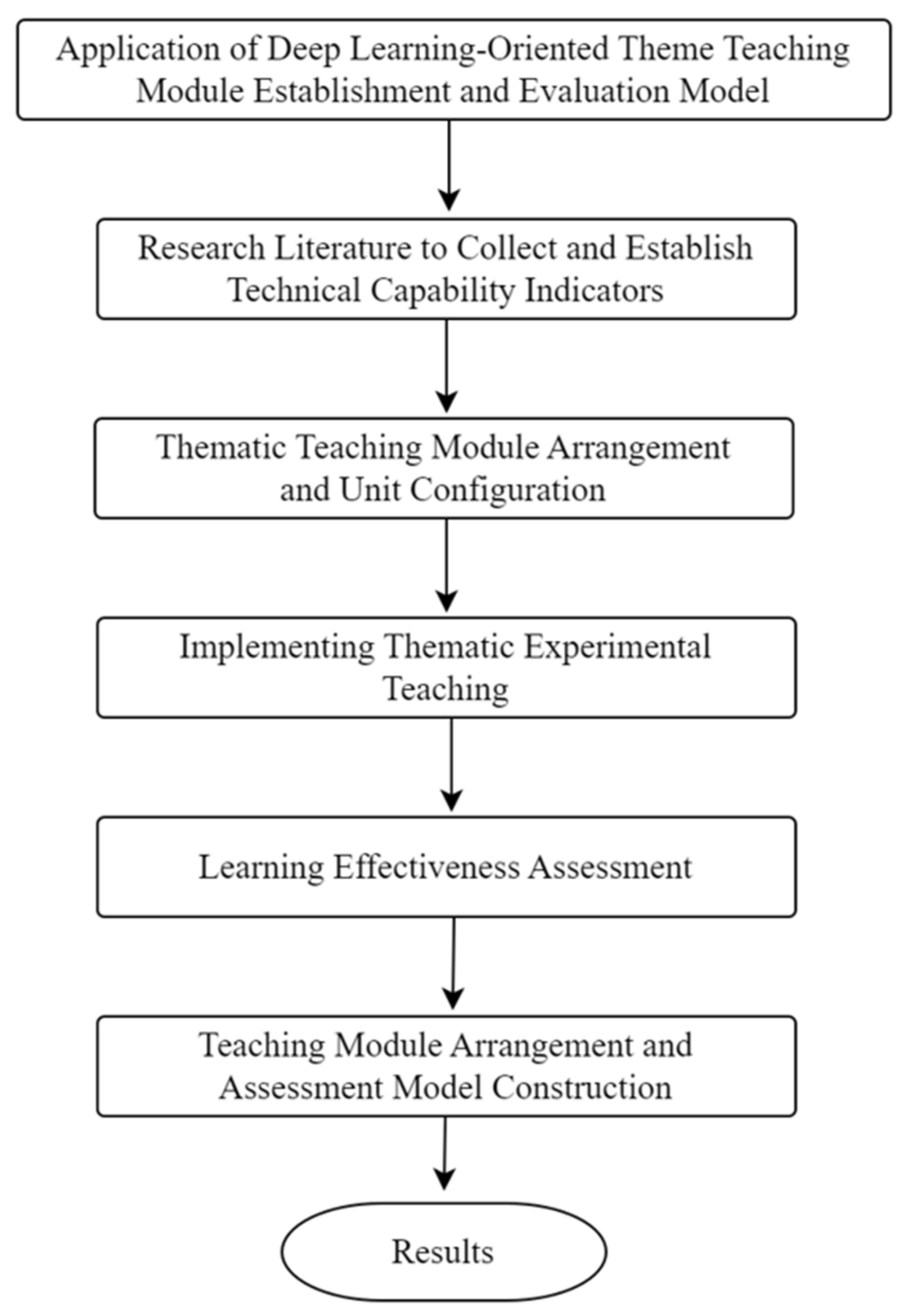
3.1. Methodology
3.2. Technical Ability Indicators and Curriculum Planning
3.3. Planing Thematic Teaching Courses and Unit Configuration
3.3.1. Capability Indicators of DL Robotic Environmental Monitoring System
3.3.2. Course Planning for DL in Robotic Environmental Monitoring Systems
3.4. Planning and Establishment of Teaching Modules
3.5. Teaching Assessment Scale, Experimental Teaching Planning, and Evaluation Strategies
3.6. Theme-Based Experimental Teaching and Experimental Teaching Design
3.6.1. Theme-Based Experimental Teaching
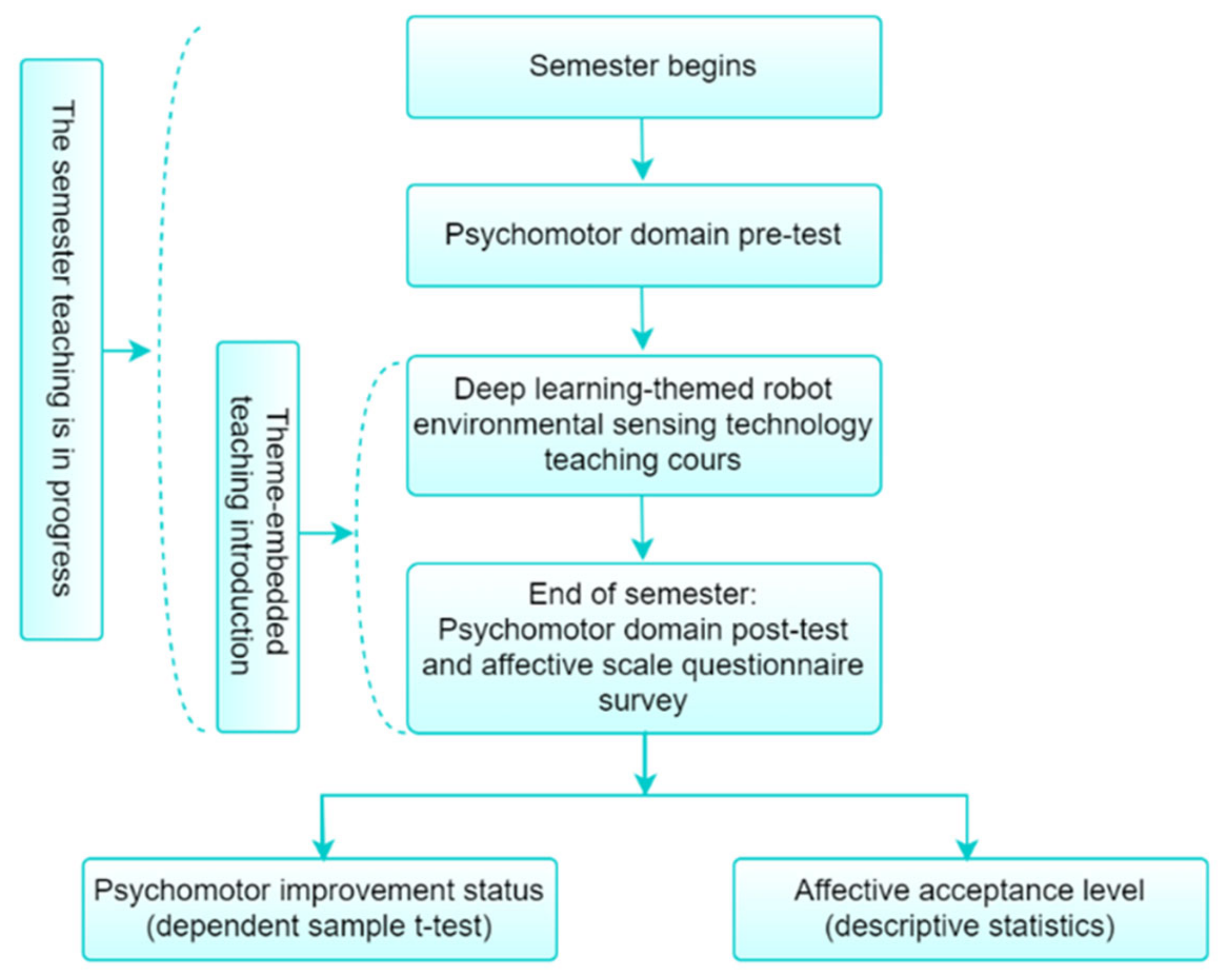
3.6.2. Experimental Teaching Design: Quasi-Experimental Design
3.7. Evaluation of Teaching Effectiveness and Revision of Teaching Materials and Aids
4. Results
4.1. Establishment of Technical Ability Indicators and Planning of Teaching Content
4.2. Course Teaching Module Equipment Arrangement
4.3. Teaching Strategies and Evaluation

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | N | M | SD |
|---|---|---|---|
| 38 | 4.00 | 0.58 |
| 38 | 4.45 | 0.61 |
| 38 | 4.05 | 0.51 |
| 38 | 4.35 | 0.63 |
| 38 | 4.35 | 0.49 |
| 38 | 4.10 | 0.53 |
| 38 | 4.15 | 0.62 |
| Teaching material and equipment | 38 | 4.15 | 0.33 |
| No. | N | M | SD |
|---|---|---|---|
| 38 | 4.10 | 0.59 |
| 38 | 4.00 | 0.65 |
| 38 | 4.00 | 0.63 |
| 38 | 4.05 | 0.66 |
| 38 | 4.35 | 0.45 |
| 38 | 4.45 | 0.58 |
| 38 | 4.50 | 0.63 |
| Cognitive development | 38 | 4.33 | 0.28 |
| No. | N | M | SD |
|---|---|---|---|
| 38 | 4.25 | 0.61 |
| 38 | 4.09 | 0.63 |
| 38 | 4.24 | 0.67 |
| 38 | 4.03 | 0.59 |
| 38 | 4.12 | 0.51 |
| 38 | 4.35 | 0.63 |
| 38 | 4.620 | 0.67 |
| Skills performance | 38 | 4.57 | 0.28 |
| No. | N | M | SD |
|---|---|---|---|
| 38 | 4.55 | 0.43 |
| 38 | 4.80 | 0.57 |
| 38 | 4.58 | 0.46 |
| 38 | 4.45 | 0.43 |
| 38 | 4.90 | 0.45 |
| 38 | 4.35 | 0.45 |
| 38 | 4.75 | 0.48 |
| Self-exploration | 38 | 4.68 | 0.31 |
5. Conclusions
- This study focused on organizing intelligent courses and theme-based teaching of DL robots, thereby emphasizing learners’ technical capabilities. After an extensive literature review, technical ability indicators were planned and tested using the FDM’s double triangle fuzzy numbers and gray areas to integrate expert opinions. Through this analysis, technical capability indicators were established on the basis of the consensus of experts and scholars to enhance the unit configuration of the planned DL robot intelligence thematic teaching course.
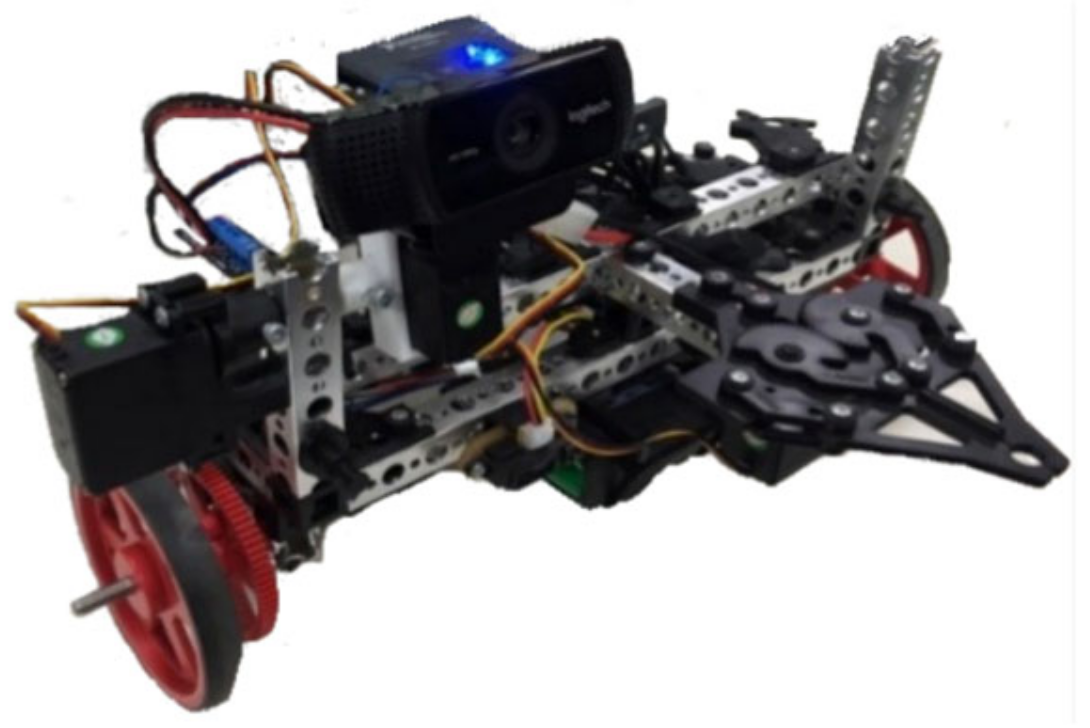
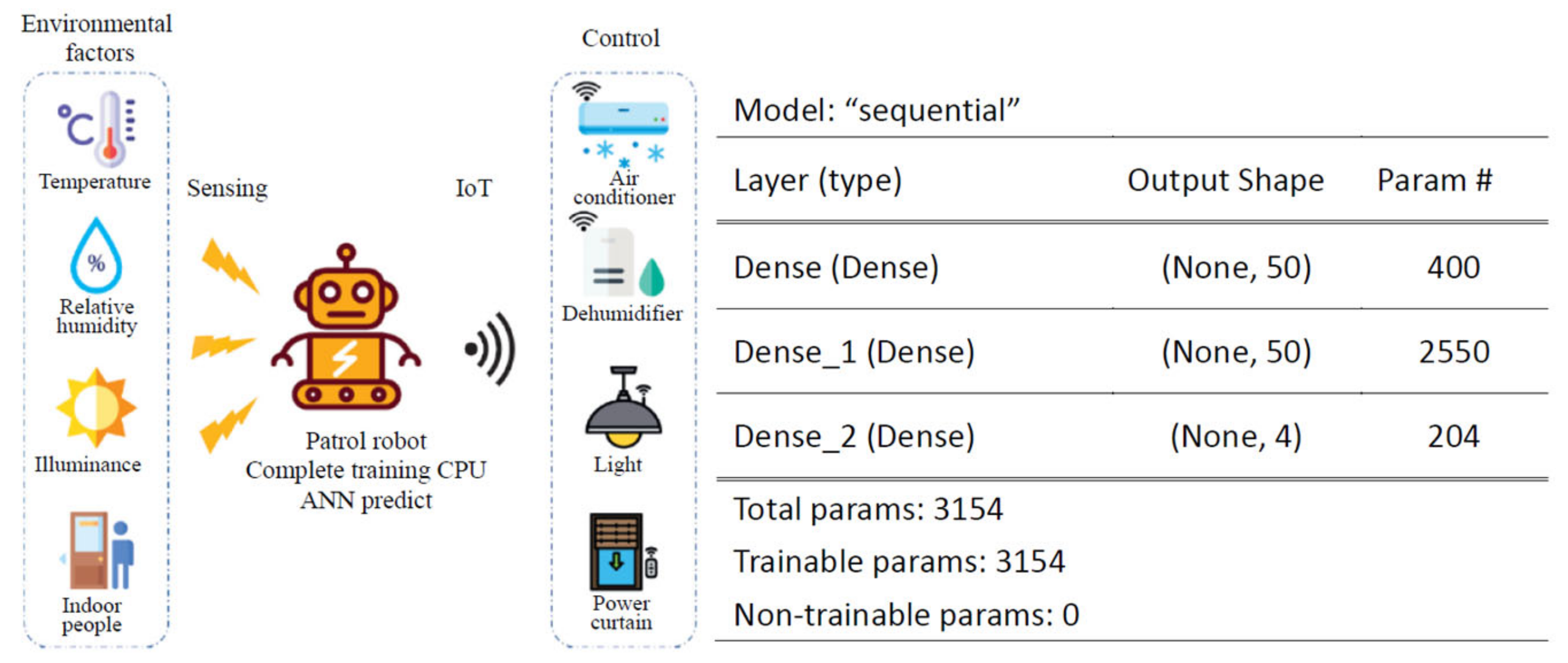
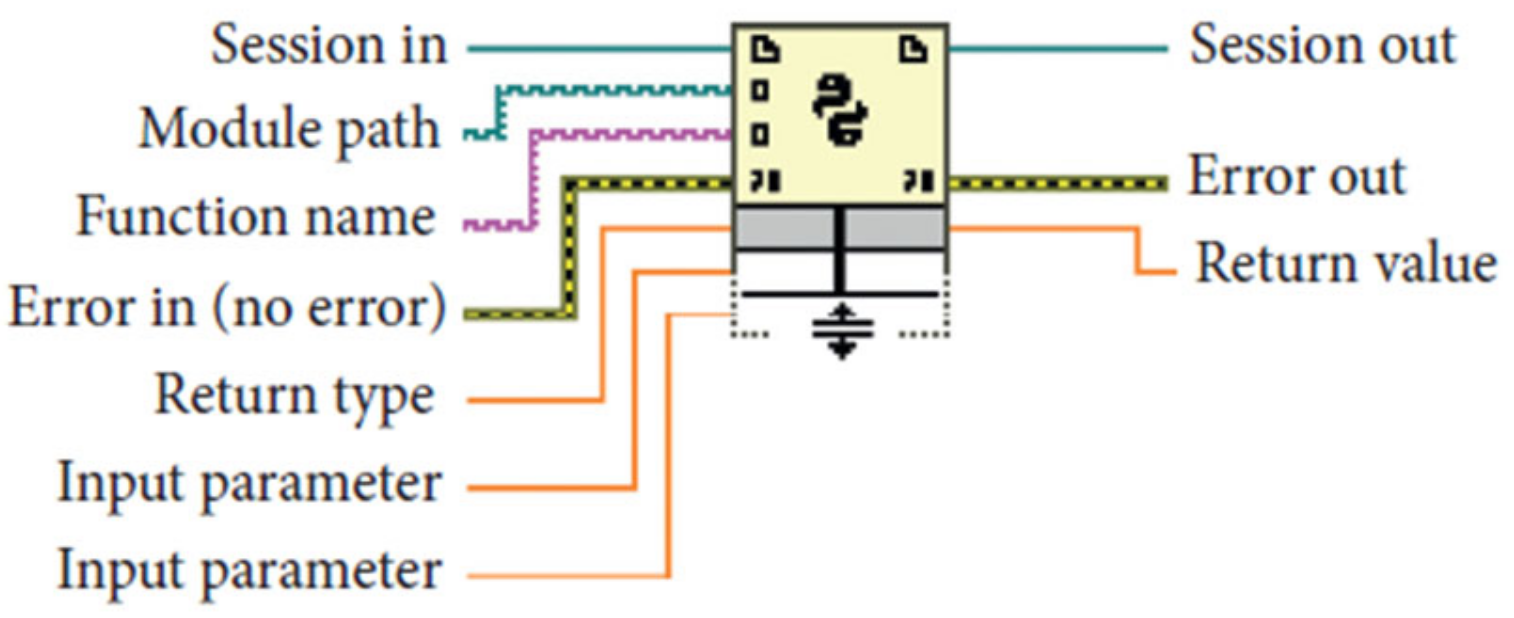
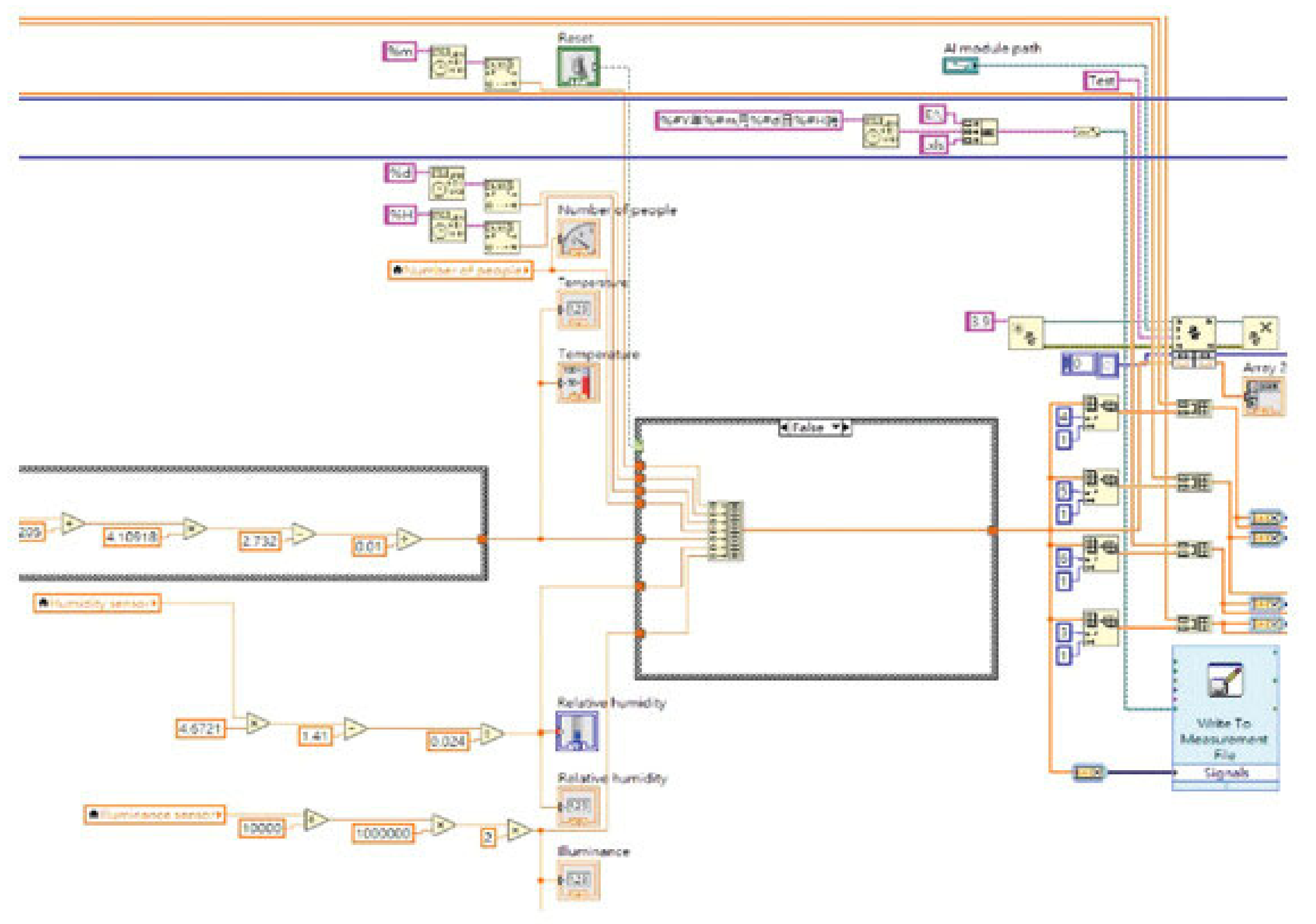
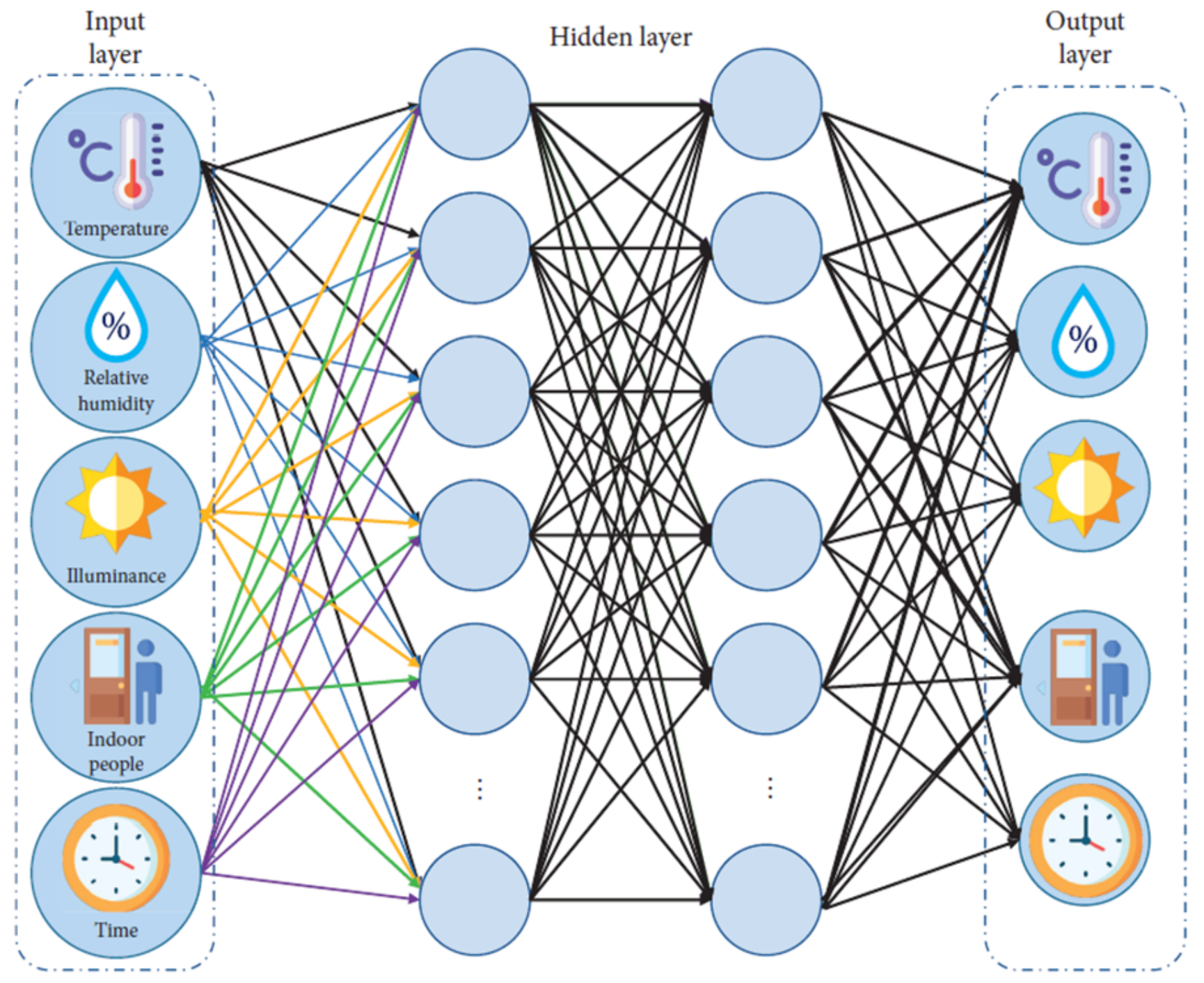
- This research used virtual instrument technology and LabVIEW software to develop a smart home system that integrates a servo host, myRIO controller, and robotic devices. The ANN AI model, developed in Python, was incorporated into the LabVIEW system for mobile control and sensor data monitoring to enhance the DL system. This combination exploits LabVIEW’s powerful monitoring interface and Python’s robust AI algorithm capabilities. This study successfully implemented environmental sensing and prediction for smart home robots and developed themed teaching modules for a DL-oriented robotic environmental monitoring system.
- This study aimed to plan and implement teaching modules on DL smart home robots and theme-based teaching experiment strategies and evaluate the effectiveness of these DL robot design and implementation courses. Skill (psychomotor) and affective scales were developed to assess learning effectiveness. The post-test results showed significantly better scores than the pre-test results, indicating effective improvement in learners’ overall technical abilities and skill levels. The affective domain assessment covered four dimensions. (1) Teaching materials and equipment: The content was correct, easy to read, well-organized, logical, and provided adequate knowledge and practice. The experimental section clearly explained the processes. (2) Cognitive development: The chapter objectives clearly expressed a learning focus, and the materials stimulated personal motivation and interest. (3) Skills performance: The courses and materials improved practical skills in robot construction. (4) Self-exploration: The course enhanced practical experience in robot design and helped learners understand their suitability for this field. Based on these results, this study successfully established thematic teaching modules and assessment models.
- Students’ future development was further evaluated, and the results revealed very positive feedback across all levels of the affective scale for those who participated in the theme-based teaching experiment. Students who wished to continue their studies demonstrated significantly better skills and more positive emotional attitudes, contributing to a higher overall positive experience.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
| Dimension 1: Robot equipment assembling ability | Grading (very good: 5, good: 4, neutral: 3, poor: 2, very poor: 1) | ||||
| 1. MyRIO controller setting and testing (Explanation: Correct MyRIO controller setting and successful communication with computer) | 5 ☐ | 4 ☐ | 3 ☐ | 2 ☐ | 1 ☐ |
| 2. Robot structure assembling (Explanation: Robot structure assembling including controller reasonable displacement) | ☐ | ☐ | ☐ | ☐ | ☐ |
| Dimension 2: Robot equipment operation ability (Explanation: Abilities to use LabVIEW and I/O of MyRIO controller) | |||||
| 1. Front panel operation ability of LabVIEW | 5 ☐ | 4 ☐ | 3 ☐ | 2 ☐ | 1 ☐ |
| 2. Block diagram operation ability of LabVIEW | ☐ | ☐ | ☐ | ☐ | ☐ |
| 3. I/O Utilization ability of MyRIO controller | ☐ | ☐ | ☐ | ☐ | ☐ |
| Dimension 3: Robot equipment integration ability | |||||
| 1. Integration ability of software and hardware (Explanation: Order, wiring correction, and controllable system) | 5 ☐ | 4 ☐ | 3 ☐ | 2 ☐ | 1 ☐ |
| Dimension 4: Robot design ability (Explanation: Creativity and structure assessment on program and function) | |||||
| 1. LabVIEW program design—Creativity | 5 ☐ | 4 ☐ | 3 ☐ | 2 ☐ | 1 ☐ |
| 2. LabVIEW program design—Function | ☐ | ☐ | ☐ | ☐ | ☐ |
| 3. Robot structure design—Creativity | ☐ | ☐ | ☐ | ☐ | ☐ |
| 4. Robot structure design—Function | ☐ | ☐ | ☐ | ☐ | ☐ |
| Dimension 1: Teaching material and equipment | 5 | 4 | 3 | 2 | 1 | |
| 1 | The teaching material content is correct and easy to understand. | ☐ | ☐ | ☐ | ☐ | ☐ |
| 2 | The amount of content and difficulty level are appropriate. | ☐ | ☐ | ☐ | ☐ | ☐ |
| 3 | The teaching material content is logical and well-organized. | ☐ | ☐ | ☐ | ☐ | ☐ |
| 4 | The teaching material is well-connected with the teaching. | ☐ | ☐ | ☐ | ☐ | ☐ |
| 5 | The teaching material and experimental equipment contain enough knowledge and practice. | ☐ | ☐ | ☐ | ☐ | ☐ |
| 6 | The teaching material and experimental equipment can clearly explain the experimental process. | ☐ | ☐ | ☐ | ☐ | ☐ |
| 7 | The teaching material and experimental equipment can integrate other related professional knowledge to solve problems. | ☐ | ☐ | ☐ | ☐ | ☐ |
| Dimension 2: Cognitive development | ||||||
| 1 | The goal of each chapter clearly expresses the key learning points. | ☐ | ☐ | ☐ | ☐ | ☐ |
| 2 | The teaching material can facilitate the learning of new professional concepts in this field. | ☐ | ☐ | ☐ | ☐ | ☐ |
| 3 | The teaching material contains innovative skill content. | ☐ | ☐ | ☐ | ☐ | ☐ |
| 4 | The teaching material can improve application ability. | ☐ | ☐ | ☐ | ☐ | ☐ |
| 5 | The teaching material and experimental equipment stimulate personal learning motivation and interest. | ☐ | ☐ | ☐ | ☐ | ☐ |
| 6 | The teaching material and experimental equipment correspond with the learning objectives of this course. | ☐ | ☐ | ☐ | ☐ | ☐ |
| 7 | The teaching material and experimental equipment inspire students to develop new products. | ☐ | ☐ | ☐ | ☐ | ☐ |
| Dimension 3: Skills performance | ||||||
| 1 | Thematic IoT smart home robot course helps increase AI robot design ability. | ☐ | ☐ | ☐ | ☐ | ☐ |
| 2 | Thematic IoT smart home robot course teaching materials encourage students to apply LabVIEW programming. | ☐ | ☐ | ☐ | ☐ | ☐ |
| 3 | Thematic IoT smart home robot course promotes personal knowledge and skills concerning myRIO controller. | ☐ | ☐ | ☐ | ☐ | ☐ |
| 4 | Thematic IoT smart home robot course can improve practical skills in robot construction. | ☐ | ☐ | ☐ | ☐ | ☐ |
| 5 | Thematic IoT smart home robot course can help students improve their innovative development ability of robot construction. | ☐ | ☐ | ☐ | ☐ | ☐ |
| 6 | Thematic IoT smart home robot course teaching material and experimental equipment provide students with practical support to meet the current learning demands of the industry. | ☐ | ☐ | ☐ | ☐ | ☐ |
| 7 | Thematic IoT smart home robot course promotes personal multidimensional professional skills. | ☐ | ☐ | ☐ | ☐ | ☐ |
| Dimension 4: Self-exploration | ||||||
| 1 | The skills training offered in this thematic course matches industry needs. | ☐ | ☐ | ☐ | ☐ | ☐ |
| 2 | This thematic course imparts professional skills and knowledge on robot design and practice. | ☐ | ☐ | ☐ | ☐ | ☐ |
| 3 | The skills training in this thematic course matches the industry’s skill requirements for robot design and practice. | ☐ | ☐ | ☐ | ☐ | ☐ |
| 4 | This thematic course can help students understand the current trends and practices in the robot design industry. | ☐ | ☐ | ☐ | ☐ | ☐ |
| 5 | This thematic course helps students understand if they are suited for this professional field. | ☐ | ☐ | ☐ | ☐ | ☐ |
| 6 | This thematic course increases students’ practical experience in robot design and practice. | ☐ | ☐ | ☐ | ☐ | ☐ |
| 7 | This thematic course offers a professional advantage for future employment. | ☐ | ☐ | ☐ | ☐ | ☐ |
References
- Minaee, S.; Abdolrashidi, A.; Su, H.; Bennamoun, M.; Zhang, D. Biometrics recognition using deep learning: A survey. Artif. Intell. Rev. 2023, 56, 8647–8695. [Google Scholar] [CrossRef]
- Mijwil, M.; Salem, I.E.; Ismaeel, M.M. The Significance of Machine Learning and Deep Learning Techniques in Cybersecurity: A Comprehensive Review. Iraqi J. Comput. Sci. Math. 2023, 4, 87–101. [Google Scholar]
- Menghani, G. Efficient deep learning: A survey on making deep learning models smaller, faster, and better. ACM Comput. Surv. 2023, 55, 1–37. [Google Scholar] [CrossRef]
- Rashid, R.A.; Chin, L.; Sarijari, M.A.; Sudirman, R.; Ide, T. Machine learning for smart energy monitoring of home appliances using IoT. In Proceedings of the 2019 Eleventh International Conference on Ubiquitous and Future Networks (ICUFN), Zagreb, Croatia, 2–5 July 2019. [Google Scholar]
- Zaza, A.; Al-Emadi, S.; Kharroub, S. Modern QoS solutions in WSAN: An overview of energy-aware routing protocols and applications. In Proceedings of the 2020 IEEE International Conference on Informatics, IoT, and Enabling Technologies (ICIoT), Doha, Qatar, 2–5 February 2020; pp. 581–589. [Google Scholar]
- Zhao, H.; Qi, Z.; Wang, S.; Vafai, K.; Wang, H.; Chen, H.; Tan, S.X.-D. Learning-based occupancy behavior detection for smart buildings. In Proceedings of the 2016 IEEE international symposium on circuits and systems (ISCAS), Montreal, QC, Canada, 22–25 May 2016. [Google Scholar]
- Chen, L.; Pelger, M.; Zhu, J. Deep learning in asset pricing. Manag. Sci. 2023, 70, 714–750. [Google Scholar]
- Cheng, J. Indexes of competitive power and core competence in selecting Asia-Pacific ports. J. Chin. Inst. Transp. 2001, 13, 1–25. [Google Scholar]
- Yao, K.-C.; Huang, W.-T.; Hsu, L.-C. Course development of robot design and practice introduced by MyRIO. Int. J. Emerg. Trends Technol. Comput. Sci. 2018, 7, 16–24. [Google Scholar]
- Yao, K.-C.; Wu, T.-C.; Hsu, L.-C.; Huang, W.-T. Evaluating thematic-approach teaching of robot design and practice course through psychomotor and affective domains. ICIC Express Lett. 2019, 13, 41–50. [Google Scholar]
- Shi, L. Program Simulation of Virtual Instrument Integrated Measurement and Control System Based on Machine Learning Algorithm. In Proceedings of the 2023 International Conference on Networking, Informatics and Computing (ICNETIC), Palermo, Italy, 9–31 May 2023. [Google Scholar]
- Mustapha, S.; Lu, Y.; Ng, C.T.; Malinowski, P. Sensor networks for structures health monitoring: Placement, implementations, and challenges—A review. Vibration 2021, 4, 551–585. [Google Scholar] [CrossRef]
- Masnicki, R.; Swisulski, D. Multi-Channel Virtual Instrument for Measuring Temperature- A Case Study. Electronics 2023, 12, 2188. [Google Scholar] [CrossRef]
- Svatos, J.; Fischer, J.; Holub, J. High-speed equivalent-time sampling virtual instrument based on microcontroller ADC. Measurement 2023, 220, 113392. [Google Scholar] [CrossRef]
- Song, Z.; Song, Z. Test Technology for Launcher Electrical Systems. In The Test and Launch Control Technology for Launch Vehicles; Springer: Singapore, 2018; pp. 11–51. [Google Scholar]
- Yu, S.; Liu, Q.; Johnson-Glenberg, M.C.; Han, M.; Ma, J.; Ba, S.; Wu, L. Promoting musical instrument learning in virtual reality environment: Effects of embodiment and visual cues. Comput. Educ. 2023, 198, 104764. [Google Scholar] [CrossRef]
- Saurabh, K.; Dudenas, P.J.; Gann, E.; Reynolds, V.G.; Mukherjee, S.; Sunday, D.; Ganapathysubramanian, B. CyRSoXS: A GPU-accelerated virtual instrument for polarized resonant soft X-ray scattering. J. Appl. Crystallogr. 2023, 56, 868–883. [Google Scholar] [CrossRef] [PubMed]
- Sánchez Márquez, C.; Torres Díaz, A.; Flores Masías, E.; Alfaro Rodriguez, C.; Grados Gamarra, J. Virtual Instrument for the Evaluation of the Optimal Parameters that Allow the Generation of Thermoelectric Energy. In Proceedings of the 2023 15th International Conference on Computer Modeling and Simulation, Dalian, China, 16–18 June 2023. [Google Scholar]
- Xu, X. Teaching Reform of Virtual Instrument Technology and Application Course Based on OBE Concept. Open Access Libr. J. 2023, 10, 1–9. [Google Scholar] [CrossRef]
- Mujawar, T.; Deshmukh, L. Smart environment monitoring system using wired and wireless network: A comparative study. In Atmospheric Air Pollution and Monitoring; IntechOpen: London, UK, 2019. [Google Scholar]
- Issa, A.; Aqel, M.O.; Zakout, B.; Daqqa, A.A.; Amassi, M.; Naim, N. 5-DOF Robot Manipulator Modelling, Development and Automation using LabVIEW, Vision Assistant and Arduino. In Proceedings of the 2019 International Conference on Promising Electronic Technologies, Gaza City, Palestine, 23–24 October 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 124–129. [Google Scholar]
- Tian, T.; Jian, W.; Li, N. Measurement of amplifier open-loop amplitude-frequency characteristics based on a virtual instrument. Appl. Mech. Mater. 2014, 475, 16–22. [Google Scholar] [CrossRef]
- El Farouk, I.I.; Frichi, Y.; Jawab, F. An Innovative Approach to Develop Performance Indicators for Medicines Supply Chain in Moroccan Public Hospitals. Int. J. Sci. Technol. Res. 2020, 9, 386–391. [Google Scholar]
- Rodriguez, R.; Otero-Neira, C.; Svensson, G. Sustainability endeavors and sustainable development in Spanish public hospitals: The case for upstream social marketing. J. Soc. Mark. 2020, 10, 215–242. [Google Scholar] [CrossRef]
- Yao, K.-C.; Lin, C.-L.; Pan, C.-H. Industrial Sustainable Development: The Development Trend of Programmable Logic Controller Technology. Sustainability 2024, 16, 6230. [Google Scholar] [CrossRef]
- Yao, K.-C.; Huang, W.-T.; Hsu, L.-C.; Yang, C.-K.; Lai, J.-Y. Evaluation of the Established IoT Smart Home Robot Teaching Module Based on Embedded Thematic-Approach Strategy. Math. Probl. Eng. 2020, 2020, 6696155. [Google Scholar] [CrossRef]

| Teaching Module Course Planning | Teaching Module Technical Capability Indicators |
|---|---|
| Ch1 Robot Technology |
|
| Ch2 Software Design |
|
| Ch3 myRIO Technology |
|
| Ch4 Thematic Robot Design and Implementation of DL |
|
| Technical Competence Indicators | Zi | Mi | Test Value Mi − Zi | Expert Consensus Value (Gi) |
|---|---|---|---|---|
| 1-1 Robot Industry Understanding Capability (Cognitive Part) | 1.00 | 1.78 | 0.78 | 8.39 |
| 1-2 Robot Structure and Design Theory Capability (Cognitive Part) | 2.00 | 2.36 | 0.36 | 7.91 |
| 1-3 AI and DL Technology Capability (Cognitive Part) | 1.00 | 1.97 | 0.97 | 8.47 |
| 2-1 LabVIEW Design Capability | 1.00 | 1.93 | 0.93 | 8.29 |
| 2-2 Python Design Capability | 1.00 | 1.69 | 0.69 | 8.35 |
| 3-1 myRIO Controller Configuration and Usage Capability | 0.00 | 2.49 | 2.49 | 7.69 |
| 3-2 myRIO Controller System Integration Capability | 1.00 | 1.91 | 0.91 | 7.50 |
| 4-1 Robot Hardware Structure Construction Capability | 1.00 | 2.50 | 1.50 | 7.46 |
| 4-2 Robot Hardware Structure Integration with Sensing and Control Capability | 2.00 | 2.64 | 0.64 | 7.89 |
| 4-3 Robot Software and Hardware Integration Capability | 2.00 | 2.48 | 0.48 | 7.88 |
| 4-4 Robot IoT Function Development Technology Capability | 0.00 | 2.38 | 2.38 | 7.96 |
| 4-5 Robot AI Modules Development Capability | 1.00 | 2.45 | 1.45 | 8.34 |
| 4-6 Robot Control System and AI Modules Integration Capability | 2.00 | 2.12 | 0.12 | 7.95 |
| 4-7 Robot System Operation Capability | 2.00 | 2.05 | 0.05 | 7.77 |
| Technical Competency Indicators Required for the Design and Implementation of DL-Themed Robots | Theme-Based Robot Design and Practical Course Planning |
|---|---|
| 1-1 Robot Industry Understanding Capability (Cognitive Part) | Current Status and Future of the Robotics Industry |
| 1-2 Robot Structure and Design Theory Capability (Cognitive Part) | Robot Structure and Design |
| 1-3 AI and DL Technology Capability (Cognitive Part) | AI and DL Technology |
| 2-1 LabVIEW Design Capability | Program Architecture |
| 2-2 Python Design Capability | Program Architecture |
| 3-1 myRIO Controller Configuration and Usage Capability | Controller Settings |
| 3-2 myRIO Controller System Integration Capability | Controller I/O usage |
| 4-1 Robot Hardware Structure Construction Capability | Hardware Architecture |
| 4-2 Robot Hardware Structure Integration with Sensing and Control Capability | Robot External Connection Device |
| 4-3 Robot Software and Hardware Integration Capability | System Integration and Function Realization |
| 4-4 Robot IoT Function Development Technology Capability | Network Relay Module |
| 4-5 Robot AI Modules Development Capability | Software Architecture |
| 4-6 Robot Control System and AI Module Integration Capability | System Integration and Function Realization |
| 4-7 Robot System Operation Capability | System Integration and Function Realization |
| Course Unit | Thematic Robot Design and Practical Course Planning |
|---|---|
| Unit 1: DL and Robotics | 1-1 Current status and future of the robot industry 1-2 Robot structure and design 1-3 AI and DL technology |
| Unit 2: Architecture of DL for Robotics | 2-1 Controller settings 2-2 Input and output use of controller 2-3 Hardware architecture 2-4 Robot external connection equipment 2-5 Network relay module 2-6 Program structure |
| Unit 3: Establishment and Implementation of DL in Robotics | 3-1 System integration 3-2 Function implementation |
| Paired Variables | N | M | SD | SE | t |
|---|---|---|---|---|---|
| Pre-test | 38 | 15.82 | 1.92 | 0.29 | −38.177 *** |
| Post-test | 38 | 40.53 | 5.08 | 0.79 |
| Item | Paired Difference | t | df | |||||
|---|---|---|---|---|---|---|---|---|
| M | SD | SE | 95% CI | |||||
| UL | LL | |||||||
| Paired Sample | Pre-test Post-test | −25.02 | 3.92 | 0.47 | −25.23 | −19.96 | −38.177 *** | 37 |
| Dimension | Question Number | N | M | SD | M/D | Sort |
|---|---|---|---|---|---|---|
| 2 | 38 | −4.58 | 0.80 | −2.44 | 4 |
| 3 | 38 | −8.17 | 0.84 | −2.61 | 3 |
| 1 | 38 | −3.21 | 0.49 | −3.19 | 2 |
| 4 | 38 | −13.38 | 0.88 | −3.45 | 1 |
| Total scale | 10 | 38 | −28.85 | 1.75 | −2.92 |
| Dimension | No. | Graduation Plan | N | SD | t | p | |
|---|---|---|---|---|---|---|---|
| 7 | Graduate | 14 | 4.54 | 0.531 | 1.599 | 0.112 |
| Employment | 24 | 4.49 | 0.547 | ||||
| 7 | Graduate | 14 | 4.82 | 0.586 | 3.582 *** | 0.000 |
| Employment | 24 | 4.23 | 0.485 | ||||
| 7 | Graduate | 14 | 4.77 | 0.428 | 3.917 *** | 0.000 |
| Employment | 24 | 4.52 | 0.409 | ||||
| 7 | Graduate | 14 | 4.86 | 0.562 | 1.798 | 0.156 |
| Employment | 24 | 4.39 | 0.634 | ||||
| Total | 28 | Graduate | 14 | 4.62 | 0.518 | 3.158 ** | 0.005 |
| Employment | 24 | 4.53 | 0.499 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, K.-C.; Hsu, L.-C.; Fang, J.-S.; Chen, Y.-J.; Guo, Z.-K. The Establishment and Evaluation Model of the Thematic Deep-Learning Teaching Module. Appl. Sci. 2025, 15, 2335. https://doi.org/10.3390/app15052335
Yao K-C, Hsu L-C, Fang J-S, Chen Y-J, Guo Z-K. The Establishment and Evaluation Model of the Thematic Deep-Learning Teaching Module. Applied Sciences. 2025; 15(5):2335. https://doi.org/10.3390/app15052335
Chicago/Turabian StyleYao, Kai-Chao, Li-Chiou Hsu, Jiunn-Shiou Fang, Yi-Jung Chen, and Zhou-Kai Guo. 2025. "The Establishment and Evaluation Model of the Thematic Deep-Learning Teaching Module" Applied Sciences 15, no. 5: 2335. https://doi.org/10.3390/app15052335
APA StyleYao, K.-C., Hsu, L.-C., Fang, J.-S., Chen, Y.-J., & Guo, Z.-K. (2025). The Establishment and Evaluation Model of the Thematic Deep-Learning Teaching Module. Applied Sciences, 15(5), 2335. https://doi.org/10.3390/app15052335