1. Introduction
The development of unmanned vehicle technologies, from drones to autonomous vehicles and robots, has rapidly expanded into both civilian and military applications [
1,
2,
3,
4,
5,
6]. To enhance the autonomy of these vehicles in various environments, extensive research has focused on situational awareness and planning. However, significant technical challenges remain, such as navigating complex terrains, predicting dynamic obstacles, and adapting to environmental changes in real-world scenarios [
7,
8]. Addressing these challenges requires transforming 2D perception data from sensors like cameras, LiDAR, and radar into practical 2D Bird’s Eye View (BEV) images. This transformation is crucial for enabling path planning and control algorithms that help unmanned vehicles navigate complex environments [
9]. This study focuses on path planning for unmanned vehicles, aiming to generate routes that avoid obstacles and efficiently reach their destinations based on maps created through BEV images.
Path planning algorithms have been extensively researched and can be broadly categorized into graph search and sampling approaches [
10,
11,
12]. Graph search-based path planning relies on a pre-constructed graph using previously acquired environmental information, enabling relatively fast shortest-path searches. However, in many unmanned vehicle operations, obtaining and constructing such information in advance is often challenging. Consequently, significant research has focused on methods that explore paths to the target point through random sampling.
Rapidly exploring Random Tree (RRT) [
13] and Probabilistic RoadMap (PRM) [
14] are representative sampling-based path planning algorithms. RRT explores paths by expanding a tree structure through random sampling, and can find a path to the target point with a high probability when a sufficient number of nodes are sampled. However, it does not guarantee optimality. The path optimality is primarily defined in terms of cost, which generally includes factors such as path length, energy consumption, and so on. RRT* improves upon RRT by restructuring the tree during node expansion, thereby enhancing the optimality of the explored path [
15].
Since the introduction of RRT*, various modified algorithms have been developed to further enhance path optimality [
16,
17,
18,
19]. Although RRT* can find a path that connects the starting point to the goal, the generated path is not always the shortest. To address these limitations, algorithms such as Informed-RRT* and RRT*-Smart have been proposed [
17,
18]. Informed-RRT* generates an initial path, then defines an ellipse using the start and goal points, along with the path length, as parameters [
17]. Additional nodes are sampled within this ellipse to improve the initial path, with the ellipse being iteratively reconfigured to further enhance path efficiency. RRT*-Smart also generates an initial path and improves it by designating key points in the environment, such as terrain corners, as beacons [
18]. Additional nodes are sampled near these beacons to update and improve the path. Although these algorithms propose additional sampling regions based on environmental analysis, their ability to improve paths is evident under certain conditions, but may be limited in complex terrains.
Therefore, in this paper, we propose a terrain analysis (TA)-RRT* algorithm which enables effective path planning through terrain analysis. The key features of the proposed algorithm are as follows: First, a probability density function (PDF) is generated based on terrain analysis, and adaptive sampling is applied using this PDF to expand the tree. This approach allows for more effective path reconfiguration. Next, the step size is adaptively adjusted according to the complexity of the terrain. In more complex terrains, a shorter step size is used, which enables more linear connections between nodes and improves the optimality of the generated path.
This paper is structured as follows:
Section 2 analyzes existing RRT*-based path planning algorithms.
Section 3 describes the proposed TA-RRT* algorithm. Then,
Section 4 evaluates the performance of the proposed TA-RRT* with existing RRT*-based algorithms. In
Section 5, we discuss various practical considerations, including real-world scenarios and the kinematic model. Finally,
Section 6 presents the conclusions of this paper and discusses future research directions.
2. Related Works
2.1. Motivation
The RRT algorithm generates random sample points to expand a tree and explores paths that allow a vehicle to reach its target point [
13]. While it has the advantage of quickly exploring complex high-dimensional spaces, it does not guarantee the optimality of the generated path. RRT is a fundamental algorithm that has served as the basis for many studies and improvements in the efficiency of path exploration.
The RRT* algorithm was designed to improve the optimality of paths while maintaining the exploration efficiency of RRT [
15]. RRT* reduces the path length by reorganizing the existing tree structure each time a new node is added during the exploration process. However, this restructuring process incurs additional computational costs. RRT* consists of the following key steps:
Random Sampling: randomly generates sample points to expand the exploration space.
Node Expansion: finds the nearest node to the sample point and generates a new node in that direction.
Collision Check: verifies that the path between the new node and the existing nodes does not collide with any obstacles.
Rewiring: after adding a new node, the connections with surrounding nodes are restructured to improve the optimality of the path.
The pseudocode of RRT* is shown in Algorithm 1.
| Algorithm 1 RRT*(, V, E) |
- 1:
, - 2:
for to K do - 3:
- 4:
- 5:
- 6:
if then - 7:
- 8:
- 9:
- 10:
- 11:
end if - 12:
end for
|
Here, V represents the set of nodes, which initially contains only the starting point . E represents the set of edges, which is initially empty. K denotes the maximum number of iterations of the algorithm. is a randomly generated sample point, is the node in the tree T closest to , is the new node expanded from in the direction of , is the set of nodes near , and r is the radius used to search for nearby nodes.
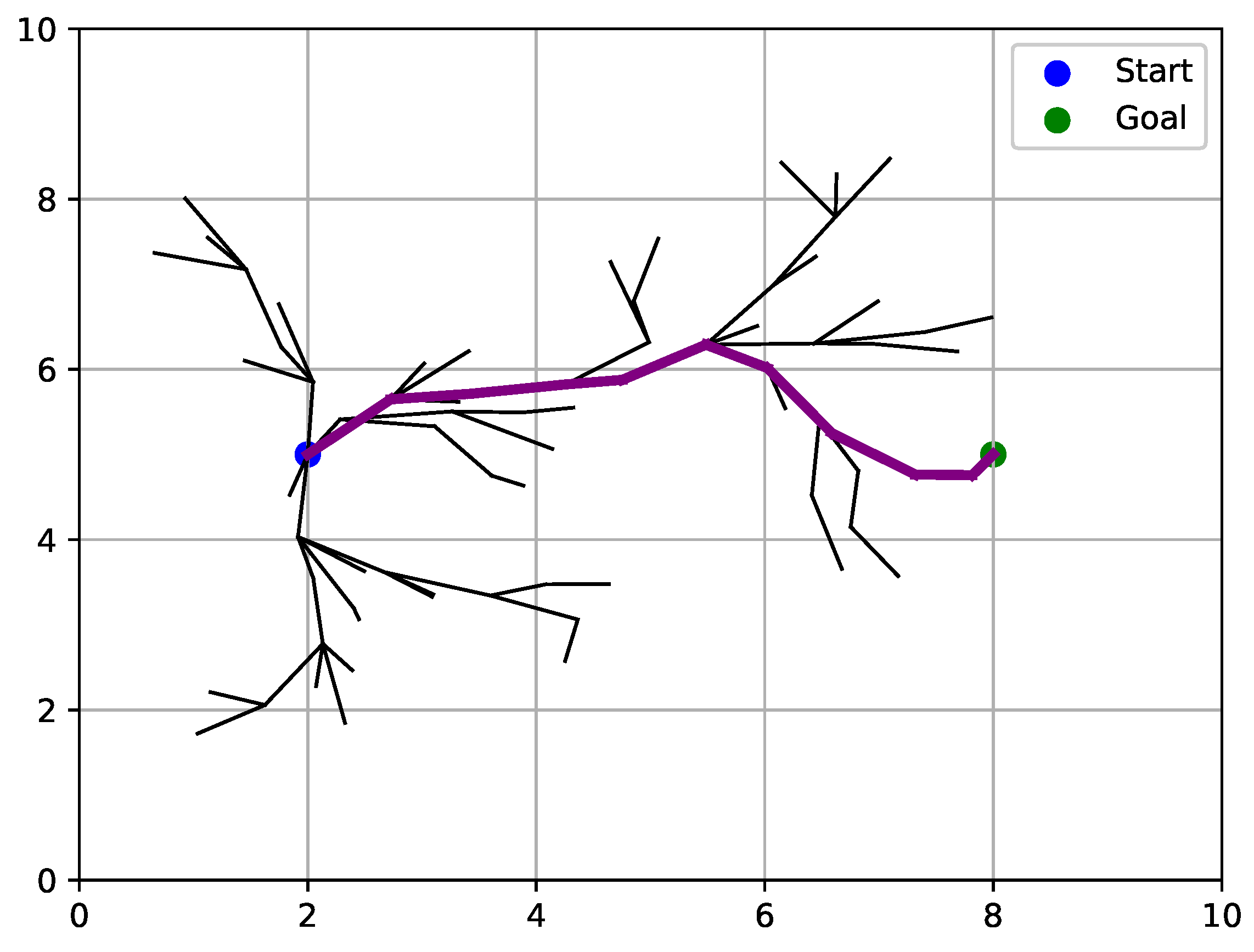
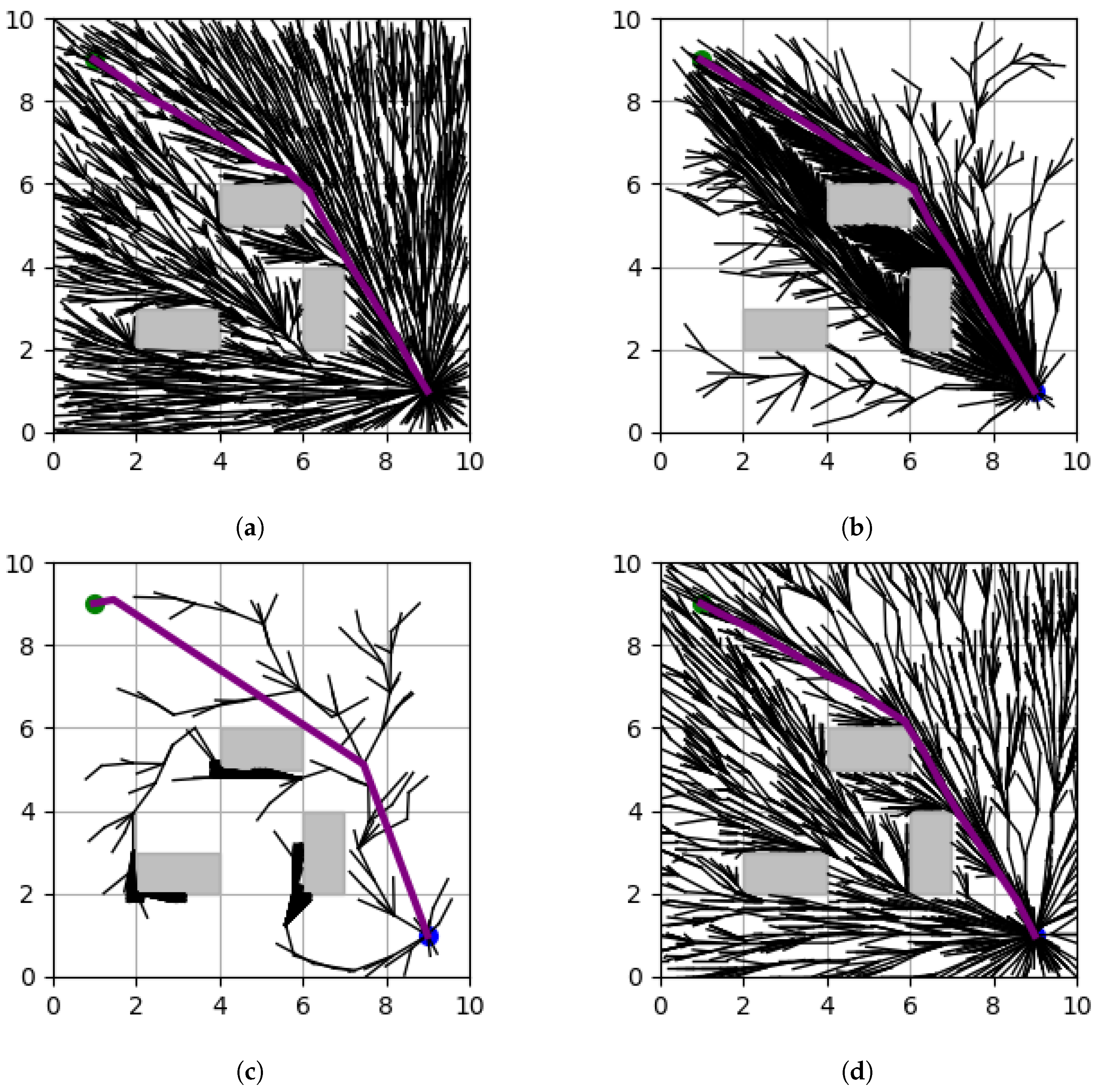
The RRT* algorithm can find a path that connects the starting point to the goal by expanding the tree. However, as shown in
Figure 1, the resulting path (purple line) may not be the shortest path between the two points.
To overcome these limitations and derive more efficient paths, algorithms such as Informed-RRT* and RRT*-Smart have been proposed [
17,
18]. These algorithms build upon RRT* by enhancing path efficiency through node sampling in a limited region after generating the initial path. Informed-RRT* first generates an initial path, then defines an ellipse using the start and goal points, along with the path length, as parameters [
17]. Additional nodes are sampled within this ellipse to improve the initial path, with the ellipse being reconfigured iteratively to further enhance path efficiency. RRT*-Smart also generates an initial path, then improves it by designating key points in the environment, such as terrain corners, as beacons [
18]. Additional nodes are sampled near these beacons to update and improve the path.
These algorithms propose additional node sampling regions based on an intuitive analysis of the environment. As a result, they can improve paths in certain conditions, but their effectiveness is limited in other scenarios, particularly in complex terrains. Therefore, this paper proposes the TA-RRT* algorithm, which is based on terrain analysis and is designed to enable more effective path planning, even in complex terrain environments.
2.2. Comparison with Recent RRT*-Based Path Planning
Recent advancements in RRT*-based algorithms have primarily focused on improving sampling efficiency, path optimality, and adaptability to diverse environments. Notable examples include Gaussian Mixture Regression-based RRT* (GMR-RRT*) [
1] and deep learning-enhanced RRT*, which leverage probabilistic models and neural networks to guide sampling toward optimal regions [
20]. While these methods demonstrate significant performance improvements in structured environments, their reliance on extensive computational resources and pre-trained models often limits their applicability in real-time scenarios.
In contrast, the proposed TA-RRT* algorithm adopts a lightweight and adaptive strategy by integrating terrain-based probability density functions and step size adjustments. Unlike GMR-RRT*, which depends on prior training data, TA-RRT* dynamically analyzes the terrain during execution, enabling efficient real-time sampling without pre-computed models. Similarly, compared to deep learning-based methods, TA-RRT* strikes a balance between computational complexity and path quality, making it particularly suitable for resource-constrained applications such as autonomous robotics.
5. Discussion of Real-World Scenarios
To effectively deploy the TA-RRT* algorithm in real-world autonomous driving applications, it should be designed to adapt dynamically to key factors such as sensor deployment configurations, environmental variability, and the specifications of the mobility platform’s kinematic model. Specifically, sensor deployment constitutes a pre-processing stage that is addressed prior to the implementation of TA-RRT*. Environmental dynamics are accounted for during the algorithm’s execution, ensuring responsiveness to changing conditions. Finally, the integration of the mobility kinematic model occurs post-computation, during the control phase of the mobility platform. This section provides a comprehensive analysis and discussion of these three critical components, emphasizing their roles in ensuring the algorithm’s practical applicability and robustness.
5.1. Sensor Deployment Information
Firstly, the practical implementation challenges related to sensor deployment can vary depending on the utilization of primary perception sensors. In practice, most research institutions and commercial autonomous vehicles assume the use of cameras as fundamental sensors [
26,
27,
28]. However, due to considerations such as cost and real-time performance limitations, LiDAR may not be employed in certain systems [
27]. Consequently, this discussion categorizes sensor deployment scenarios into two primary cases: (1) a Camera-Based Perception System, and (2) a LiDAR-Camera Fusion-Based Perception System that integrates data from both LiDAR and cameras. These scenarios are explored further in the subsequent analysis.
The Camera-Based Perception System primarily focuses on the generation of camera-based uMaps as well as localization and mapping. The creation of uMaps may involve constructing a 2D map using 2D BEV information derived from cameras [
29], or alternatively, generating a 3D map through camera-based 3D reconstruction and landmark detection [
30]. Localization and mapping are then performed on the generated uMap using a global positioning system (GPS) and landmark-based references to ensure accurate spatial alignment and navigation.
In contrast, LiDAR-based perception systems utilize point cloud data from LiDAR sensors to generate high-definition (HD) maps, which serve as the foundation for localization and mapping [
31,
32]. However, these systems face inherent limitations stemming from the characteristics of LiDAR data, such as occlusion issues caused by the linear propagation of signals, low resolution resulting from limited channel density in point clouds, and the absence of color and texture information. To address these challenges, LiDAR data are often fused with camera data, enabling the system to overcome these deficiencies and improve the accuracy of localization and mapping processes [
31,
32].
Moreover, the reliability of the global path planning algorithm is highly correlated with the exploration space, which is closely related to the HD map generation range of each vehicle [
33]. Therefore, various studies have been conducted to expand the exploration space, which can be broadly categorized into two approaches [
34,
35,
36,
37,
38,
39,
40].
The first approach focuses on expanding the sensor detection range [
34,
35]. This method involves using LiDAR, radar, or high-resolution cameras with a wider detection radius to acquire or fuse more refined information from distant areas, thereby enlarging the exploration space. However, in the case of LiDAR, increasing the detection range significantly raises costs, which may reduce its commercial viability. Additionally, even with a wider sensor range, performance limitations may arise due to reduced recognition accuracy at longer distances and the potential for occlusions within the detection range.
The second approach involves expanding the exploration space through information exchange between nearby vehicles or infrastructures via networks [
36,
37,
38,
39,
40]. In this method, adjacent vehicles or infrastructures collect information from their respective perception sensors and share it with each other. By combining these shared data, portions of the HD map are collaboratively generated, enhancing the overall exploration capability.
After the creation of such maps and the completion of localization and mapping on these maps, the proposed TA-RRT* algorithm is employed to perform global path planning.
5.2. Consideration of Kinematic Model
To deploy the TA-RRT* algorithm on an actual mobility platform, it is essential to consider the kinematic model of the platform during operation. This discussion will focus on the two-axle model, which applies to most mobility platforms, including vehicles such as cars or bicycles, where the front axle is responsible for steering and the rear axle provides propulsion. Specifically, the bicycle model will be utilized as the basis for this analysis.
For the real-world implementation of TA-RRT* in the two-axle model, it is necessary to account for the physical constraints of the mobility platform, such as its minimum turning radius, steering angle limits, and velocity constraints. In particular, during the trajectory planning phase of TA-RRT*, waypoints are derived using methods such as Pure Pursuit [
41] or the Stanley algorithm [
42]. The Stanley algorithm is a path tracking method originally developed for autonomous vehicles. It employs a nonlinear feedback control law to minimize the cross-track error and heading deviation, ensuring a smooth trajectory. To ensure these waypoints are feasible for the mobility platform, the physical constraints of the kinematic model—including the minimum turning radius, steering angle limits, and velocity constraints—must be considered. This involves evaluating the suitability of each derived waypoint and, if necessary, generating modified waypoints that comply with these physical constraints.
where
and
are the Cartesian coordinates of the vehicle’s rear axle center,
v denotes the vehicle’s linear velocity,
represents the vehicle’s orientation angle relative to the global coordinate frame,
L is the distance between the front and rear axles (wheelbase) and
is the steering angle of the front wheel.
In particular, the following physical constraints are taken into account: the minimum turning radius,
; the steering angle limit,
; and the velocity constraint,
. Here,
represents the minimum radius within which the mobility platform can execute a turn, given the steering angle limitations. This is defined by the following equation:
Furthermore, the steering angle limit is defined as , where represents the steering angle of the front axle, constrained by the maximum value . Additionally, the velocity is bounded by the acceleration and deceleration capabilities, expressed as . By taking these parameters into account, the feasibility of a given waypoint is evaluated, and a new waypoint closest to the original one is determined within the constraints of these limitations for operational use. In cases where a four-axle model is considered, the Double Ackermann Model may be applied.
5.3. Dynamic Environment
In practice, when designing global path planning (GPP) algorithms, the environment is typically assumed to be static, and the GPP algorithm is developed under this assumption. Any dynamic changes in the environment are usually addressed through Local Path Planning (LPP). However, when incorporating dynamic environments into GPP operations, it is common to recompute the global path whenever environmental changes are detected. This approach ensures that the system adapts to the new environment by generating an updated global path and continuing operations accordingly. Specifically, the system initially operates based on a pre-computed global path while periodically monitoring for environmental changes. Upon detecting such changes, the system recomputes the global path and subsequently performs LPP to handle finer adjustments within the updated environment. A detailed discussion of related studies addressing this approach can be found in the Related Words Section of this paper.
6. Conclusions
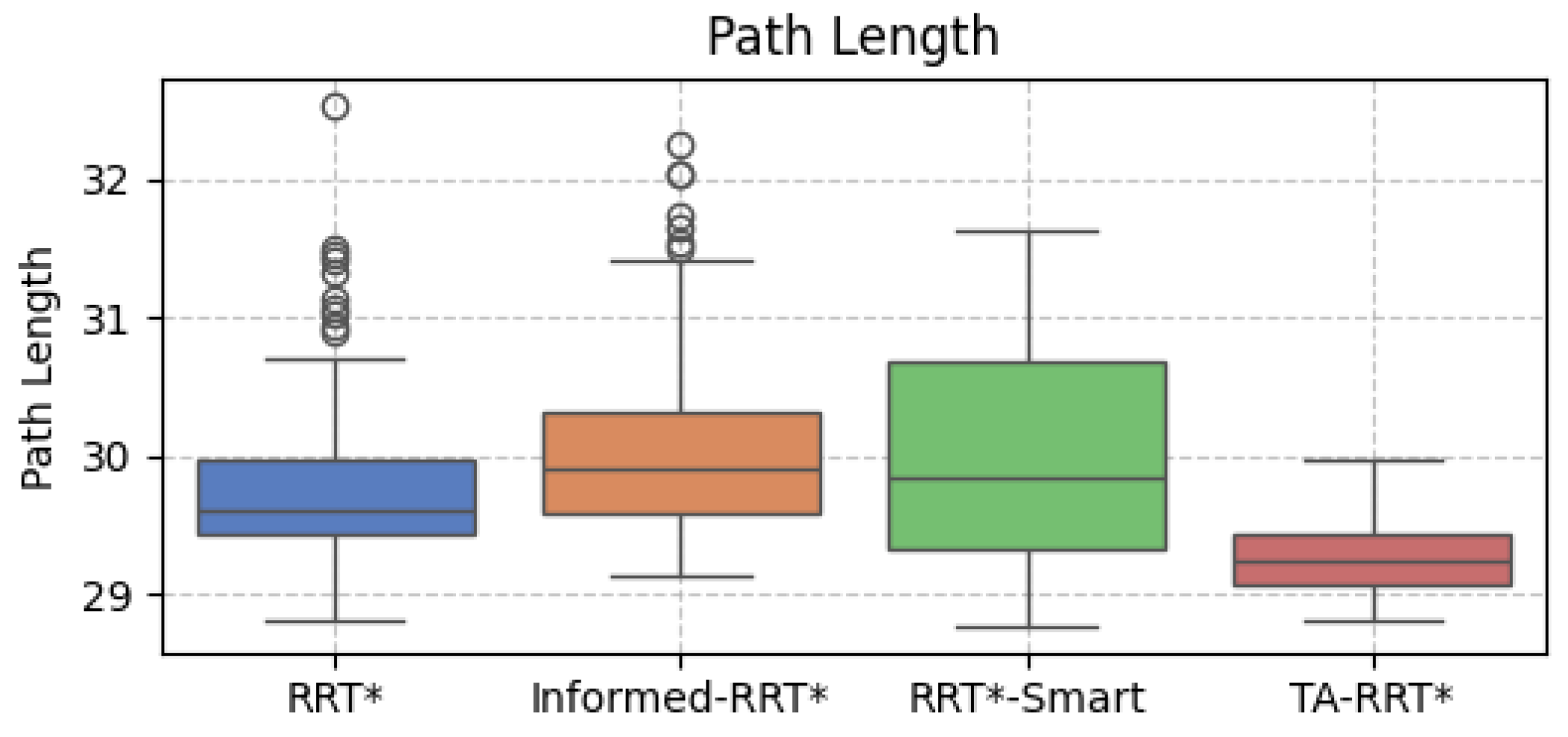
In this paper, we proposed a terrain analysis-based adaptive RRT* (TA-RRT*) algorithm to address the path planning problem. The proposed algorithm enables efficient path exploration by analyzing the complexity of terrain and employing density-based sampling using the terrain corners. Notably, TA-RRT* demonstrated the ability to effectively optimize its initial path, even in complex environments. The experimental results showed superior performance in terms of path length compared to conventional RRT* algorithms, and it produced more consistent results. The proposed TA-RRT* algorithm demonstrated its robustness through path replanning in dynamic scenarios, effectively navigating changing conditions with reliable performance.
In future research, we plan to improve the performance of the proposed algorithm by applying it to various operational environments and platforms. Through this, we aim to improve the algorithm’s versatility and allow it to maintain consistent performance in various conditions.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}