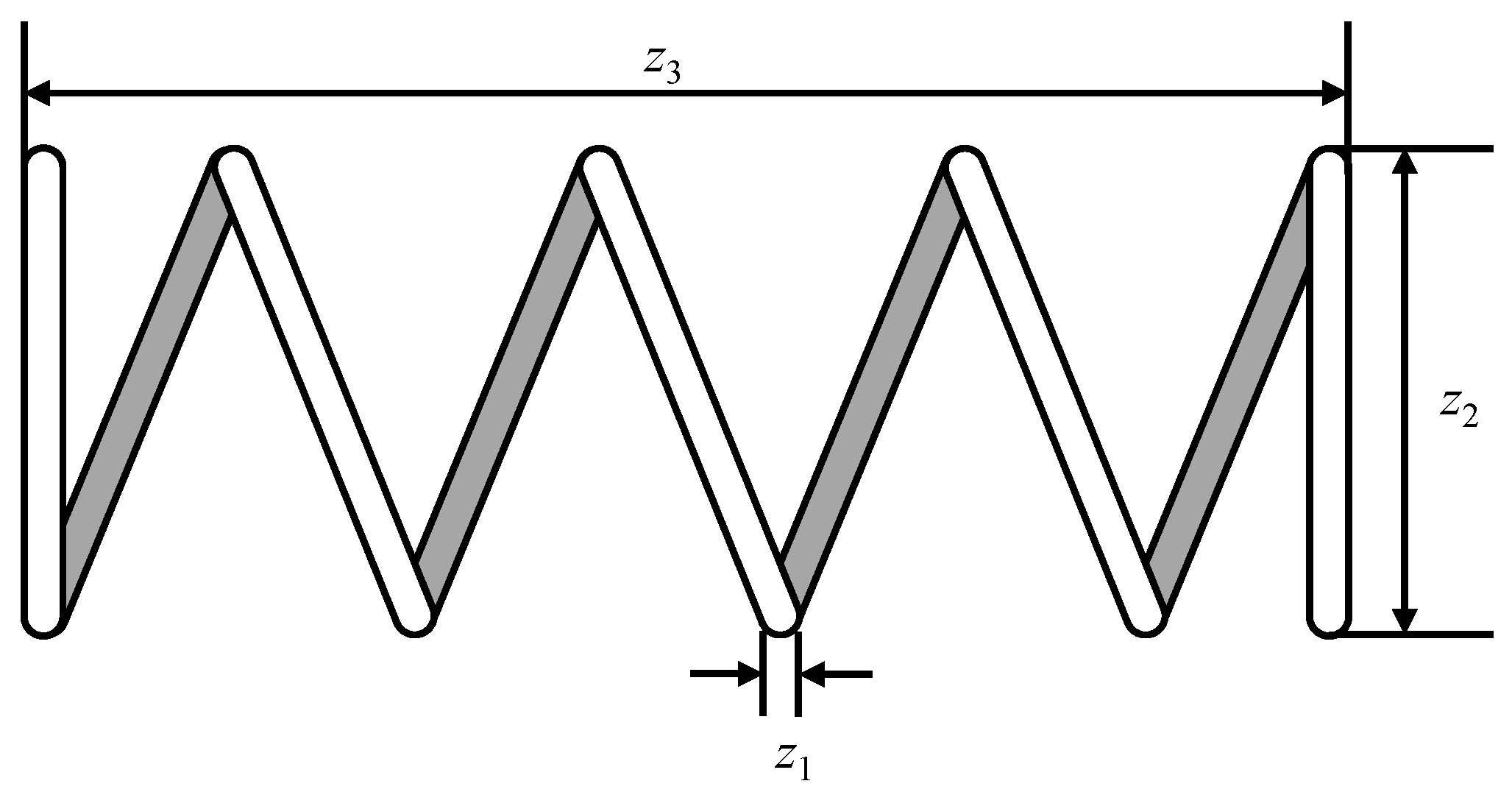
The above section validates the effectiveness and superiority for the DMMAEO on the 58 test functions. To further analyze the practicability for the DMMAEO, two types of engineering application problems are addressed using the DMMAEO. The first type of engineering application problem comprises six engineering optimization problems, including three-bar truss design (EA1) [
42], spring design (EA2) [
43], pressure vessel design (EA3) [
44], tubular column design (EA4) [
45], piston lever design (EA5) [
46], and reinforced concrete beam design (EA6) [
47]. The second type of engineering application problem in this section is an unmanned ground vehicle (UGV) multi-target path planning problem (EA7) [
48]. Different from the 58 test functions in the previous section, these engineering application problems are constrained optimization problems. To deal with the constraint conditions of these engineering application problems in a simple and efficient way, this section adopts a penalty function approach [
49] as the constraint handling strategy. A detailed presentation of the aforementioned seven engineering application problems, as well as the corresponding experimental results and analysis across seven engineering application problems, is provided by the subsequent subsections.
5.7. UGV Multi-Target Path Planning (EA7)
The fourth engineering application problem used in this section is the UGV multi-target path planning problem, which is common in tasks such as warehousing logistics, data collection, and security patrols. A map for the multi-target path planning problem is shown in
Figure 11, where the black area represents the infeasible region formed by different types of obstacles, the white area represents the feasible region, and the pentagrams represent the multiple predefined targets. For this problem, the UGV needs to start from one of the multiple predefined targets, navigate sequentially through a series of predefined targets while avoiding obstacles, stop at each predefined target to perform the corresponding task operation, and finally return to the starting location. Therefore, this problem aims to obtain the shortest feasible path for the UGV through multiple predefined targets in an obstacle environment so as to achieve the efficient processing of related tasks. The detailed description of the mathematical model for this UGV multi-target path planning problem are given through Equation (
50).
where
represents the total path connecting all predefined targets in turn, which consists of a series of path points
;
K is the overall amount for sub-paths, which is also the same as the overall amount for predefined targets;
denotes the path length for the
k-th sub-path in the total path; and
represents the infeasible region in the obstacle environment.
In accordance with the features from the UGV multi-target path planning problem, the problem can be transformed into two types of sub-problems: a path planning problem between any two predefined targets and a traveling salesman problem. In this way, the optimal solution of path planning problem between any two predefined targets yields the shortest path between any two predefined targets. Then, based on the results of the shortest path between any two predefined targets, the optimal solution of traveling salesman problem yields the shortest total path through all predefined targets.
In addition, a smooth path is helpful for the subsequent tracking control of UGV to avoid unnecessary overdriving and slipping. For this purpose, the cubic quasi-uniform B-spline curve approach is applied to generate the smooth path for the UGV multi-target path planning problem, which can guarantee driveability and smoothness for the generated path [
50]. The B-spline curve is constructed through
where
indicates the B-spline curve;
m is the order of B-spline curve, and the corresponding degree of B-spline curve is
; the overall control points amount is
, which needs to be greater than or equal to the order
m;
represents the
-th control point of B-spline curve;
indicates the B-spline basic function with
m-order for
-th control point, which is calculated through Cox-de Boor recursion formulas as
where ‛
’ is defined in Equation (
53); and the B-spline basic function is formed through a non-decreasing sequence with continuously varying values
called the knot vector, whose values at the beginning and end are commonly fixed at 0 and 1, respectively. For a cubic quasi-uniform B-spline curve, the degree needs to be set at 3, the knots at both ends in the knot vector have a repetition of 4, and the middle knots are uniformly distributed. So when the order
m is set to 4 and the distribution of the knot vector is set according to the previous requirements, the cubic quasi-uniform B-spline curve can be obtained to generate the smooth path. The cubic quasi-uniform B-spline curve can generate a smooth path through the determination of several control points, the generated path passes through the first and last control points, and the adjustment of individual control points can locally modify the generated path. These characteristics make the cubic quasi-uniform B-spline curve suitable for generating smooth paths and effectively improve the computational efficiency. Additionally, the UGV in the multi-target path planning problem needs to stop at each predefined target to perform the corresponding task operation. So, the cubic quasi-uniform B-spline curve approach is only required to generate a smooth path between any two predefined targets, and there is no need to ensure smoothness for the total path at each target.
With the combination of the cubic quasi-uniform B-spline curve approach and the proposed DMMAEO, the steps involved in solving multi-target path planning problem are shown below:
Step 1 Set the elements associated with multi-target path planning problem such as map , order m and number of control points in each sub-path, and the predefined multiple targets denoted by and in each sub-path.
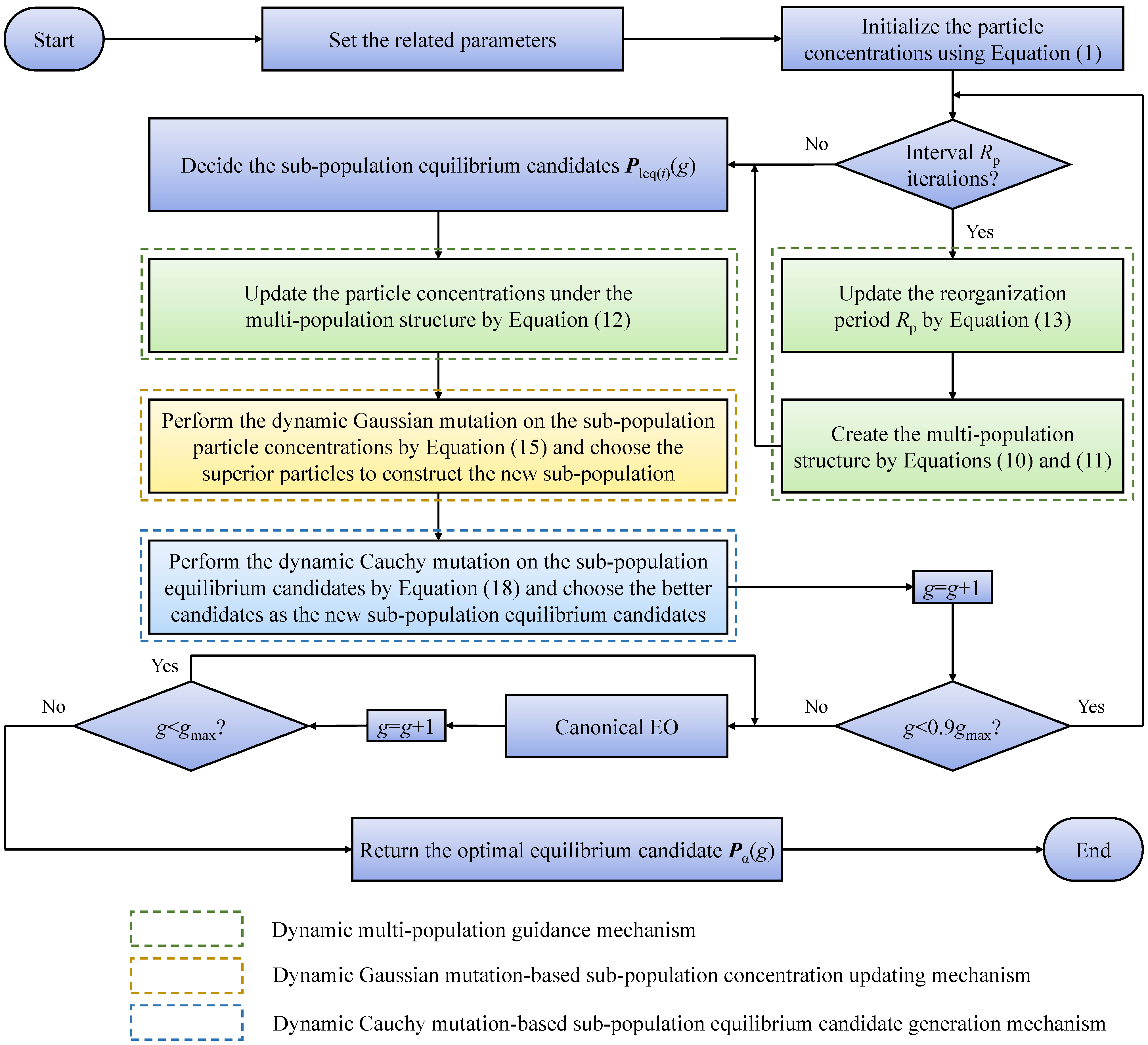
Step 2 Set the related parameters for DMMAEO, including current iteration number g, maximum iteration number , population size N, particle dimension as per number of control points, sub-population number M, and reorganization period .
Step 3 Set the cost function of DMMAEO according to Equation (
50).
Step 4 Initialize the control points using the DMMAEO concentration initialization mechanism and calculate the cost function of the corresponding initial sub-path generated by the cubic quasi-uniform B-spline curve between any two predefined targets.
Step 5 Optimize the control point positions in each sub-path based on the DMMAEO to find the shortest sub-path between any two predefined targets.
Step 6 Run Step 5 until the termination condition specified by this path planning sub-problem between any two predefined targets is satisfied.
Step 7 Based on the shortest sub-path between any two predefined targets, calculate the cost function of the total paths connecting all predefined targets generated by the random keys technology [
51].
Step 8 Optimize the connection sequence of each sub-path in the total path based on the DMMAEO to find the shortest total path through all predefined targets.
Step 9 Run Step 8 until the termination condition specified by this traveling salesman sub-problem is satisfied.
Step 10 Return the shortest total path through all predefined targets for the multi-target path planning.
5.8. Results and Analysis of DMMAEO on Engineering Application Problems
For examining the practicability of DMMAEO, the seven engineering application problems (EA1-EA7) mentioned above are solved by the DMMAEO in this subsection, which are also solved by several recent promising algorithms with three categories mentioned in the previous section (EO [
11], PSO [
8], GWO [
5], HHO [
6], SMA [
7], MPSO [
36], MELGWO [
37], LWMEO [
20], SASS [
52], and SaCHBA_PDN [
53]) for comparison. Among the compared algorithms, SASS is the best algorithm for addressing engineering optimization problem, and SaCHBA_PDN is the best algorithm for addressing the path planning problem. Similar to the previous section, the compared algorithms adopt identical experimental settings to ensure the fairness of optimization performance comparison in solving engineering application problems. In this section, the best fitness value (Best), average fitness value (Ave.), worst fitness value (Worst), and standard deviation of fitness value (Std.) are applied in assessing the algorithm performance.
Table 15,
Table 16,
Table 17,
Table 18,
Table 19,
Table 20 and
Table 21 show the results for the compared algorithms, which are obtained by implementing each algorithm 30 times independently on each engineering application problem. In
Table 15,
Table 16,
Table 17,
Table 18,
Table 19,
Table 20 and
Table 21, the best results and the top-performing algorithm are highlighted in bold.
As per the results of the three-bar truss design (EA1) from
Table 15, the DMMAEO exhibits a superior performance compared to the other algorithms in minimizing the volume of three-bar truss. Regarding the spring design (EA2), the DMMAEO achieves the strongest performance in minimizing the spring weight compared to other algorithms based on the results from
Table 16. Regarding the pressure vessel design (EA3), the DMMAEO outperforms the compared algorithms in terms of minimizing the fabrication cost of the pressure vessel based on the results from
Table 17. As per the results of the tubular column design (EA4) from
Table 18, the DMMAEO exhibits a superior performance compared to the other algorithms in designing a uniform column of the tubular section to carry a compressive load at minimum cost. Regarding the piston lever design (EA5), the DMMAEO achieves the strongest performance in minimizing the oil volume when the lever of the piston is lifted up from 0° to 45° compared to the other algorithms based on the results from
Table 19. Regarding the reinforced concrete beam design (EA6), the DMMAEO outperforms the compared algorithms in terms of minimizing the total cost of the structure based on the results from
Table 20. As per the results of UGV multi-target path planning problem (EA7) in
Figure 11 and
Table 21, the compared algorithms generate feasible paths in different types and the DMMAEO performs better in obtaining the shortest path compared to other algorithms. Therefore, the DMMAEO outperforms other compared algorithms and obtains the top rank in all seven engineering application problems. These results mean that the DMMAEO is superior to other compared algorithms and exhibits the most competitive overall performance within the compared algorithms for addressing engineering application problems. Based on the aforementioned results, it can be seen that the DMMAEO efficiently solves the engineering application problem by constructing dynamic multi-population mutation architecture. In the UGV multi-target path planning problem (EA7) especially, the dynamic multi-population mutation architecture in the DMMAEO could effectively deal with the problems caused by various obstacles, multi-stage optimization, and numerous local optima through enhancing population diversity and search ability, which makes the DMMAEO more suitable for the UGV multi-target path planning problem.
To summarize, the results and analysis mentioned above indicate that the proposed DMMAEO has practicability and competitiveness in solving engineering application problems.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}