Abstract
As port operations rapidly evolve toward intelligent and heavy-duty applications, fault diagnosis for core equipment demands higher levels of real-time performance and robustness. Deep learning, with its powerful autonomous feature learning capabilities, demonstrates significant potential in mechanical fault prediction and health management. This paper first provides a systematic review of deep learning research advances in rotating machinery fault diagnosis over the past eight years, focusing on the technical approaches and application cases of four representative models: Deep Belief Networks (DBNs), Convolutional Neural Networks (CNNs), Auto-encoders (AEs), and Recurrent Neural Networks (RNNs). These models, respectively, embody four core paradigms, unsupervised feature generation, spatial pattern extraction, data reconstruction learning, and temporal dependency modeling, forming the technological foundation of contemporary intelligent diagnostics. Building upon this foundation, this paper delves into the unique challenges encountered when transferring these methods from generic laboratory components to specialized port equipment such as shore cranes and yard cranes—including complex operating conditions, harsh environments, and system coupling. It further explores future research directions, including cross-condition transfer, multi-source information fusion, and lightweight deployment, aiming to provide theoretical references and implementation pathways for the technological advancement of intelligent operation and maintenance in port equipment.
1. Introduction
Port equipment serves as the core hub of modern logistics systems, with its operational status directly impacting the overall efficiency and safety of port operations. Typical large-scale core port equipment, such as quay container cranes (quayside gantry cranes) and tire-mounted/rail-mounted container gantry cranes (yard gantry cranes) [1], exhibits structural complexity characterized by large dimensions, flexibility, and multi-mechanism coordination [2]. Operationally, this equipment exhibits distinct characteristics including heavy loads, frequent starts and stops, and exposure to impact loads. Simultaneously, this equipment endures prolonged operation in highly saline, humid marine environments prone to corrosion [3]. These factors collectively result in more complex and concealed failure modes for critical components such as hoisting mechanisms, traveling mechanisms, wire ropes, and steel structures.
Therefore, fault diagnosis for port equipment faces more stringent demands than general rotating machinery: on one hand, extremely high safety and reliability requirements mean that even minor faults can lead to catastrophic consequences; on the other hand, enormous downtime costs demand diagnostic systems to possess high precision and early warning capabilities to enable predictive maintenance and minimize unplanned downtime. Driven by sustained growth in import-export trasssde, port equipment operates under increasingly intense workloads. Its operational data exhibits multidimensional, heterogeneous, and massive characteristics [4], posing significant challenges for data-driven precision equipment management. Achieving accurate fault diagnosis for port equipment [5] is a core element in ensuring safe operation, protecting personnel safety, and controlling maintenance costs.
To achieve this goal, the industry has progressed through distinct technological phases. Early approaches predominantly relied on traditional methods such as manual inspection and vibration monitoring [6]. Manual inspection heavily depended on technicians’ experience, entailed high on-site operational risks, and lacked consistency; vibration monitoring [7] utilizes techniques like Fourier transforms but faces limitations in accuracy and real-time performance. These methods are costly and struggle to establish precise models for extracting deep features from data.
Therefore, deep learning technology—capable of autonomously learning features from big data—can be introduced as a developmental and breakthrough approach to fault diagnosis in port equipment [8]. Its core advantage is that as a universal function approximator, it can directly learn highly nonlinear mapping relationships from data without relying on complex explicit physical models. This ability not only makes it a breakthrough in the fields of image recognition and natural language processing but also is accelerating its penetration into multiple scenes such as industry, commerce, finance, people’s livelihood and agriculture, showing strong cross-domain adaptability and generalization ability.
In the industrial field, deep learning is widely used in quality inspection and defect recognition. For example, abdulrahim Mohammed et al. [9] systematically reviewed the application of deep learning in automatic welding defect detection and analyzed the ability of single-stage and two-stage models in processing small-size defects, low image contrast and diversified defect geometry. Aman nohwal et al. [10] used a convolutional neural network (CNN) and fully connected network (FCN) to realize automatic discrimination of tungsten inert gas welding (TIG) defects of stainless steel 304 based on visible spectral images. In addition, Junlai Zhao et al. [11] proposed a deep learning method based on 3D point cloud data, which realized the real-time detection of powder bed defects in the process of laser powder bed fusion (LPBF) and further expanded the perception dimension of industrial quality monitoring.
In the direction of business intelligence, deep learning provides a new path for business process optimization and risk prediction. Junyi Xu et al. [12] proposed an improved Bilstm Kan framework, introduced the agent attention mechanism to enhance the modeling ability of long-term dependencies, and used Kan to replace the traditional MLP, which improved the performance of business process prediction and enhanced the interpretability of the model. Nicola Contuzzi et al. [13] built an overall architecture that integrates IOT sensors, LSTM networks and business intelligence systems to achieve collaborative optimization of sales forecasting, raw material procurement and logistics management in the organic food processing industry. Budan Wu et al. [14] proposed a business process activity prediction model based on a transformer and attention mechanism, which quantifies the impact of events and attributes through an attention score and provides highly explanatory prediction results.
In financial analysis, deep learning also shows excellent time series modeling and risk identification ability. Yahui Bai et al. [15] summarized the extensive application of reinforcement learning in the financial field through systematic review and meta-analysis, proposed the “RL premium” index to unify performance evaluation, and discussed key challenges such as interpretability, unstable environment and model robustness. The 4C FinNet framework proposed by SHIMENG Yang et al. [16] converts the financial statement data into a four channel feature map and combines mobilenetv2 and LSTM networks to significantly improve the accuracy and robustness of financial risk prediction.
In addition, in-depth learning also plays an important role in social fields such as people’s livelihood and agriculture. Miia Chabot et al. [17] developed a flood management decision support system (DSS) integrating convlstm, digital twins and economic risk assessment, which improved the accuracy of flood prediction and the ability of risk visualization and provided a new tool for adaptive governance. Pouya Bohlol et al. [18] proposed a non-destructive method based on deep learning and adaptive data enhancement, which realized the intelligent identification of the quality of exported saffron and provided a feasible technical path for the quality control system of agricultural products.
The above cross-domain success jointly confirms the strong potential of deep learning to mine common patterns from complex data. Based on this, it has also made great progress in the specific field of mechanical equipment fault diagnosis. Specifically, in this field, in-depth learning relies on the parallel computing ability of general purpose computing on graphics processing units (GPGPUs) to independently mine potential features from complex data streams such as operating parameters and state parameters of mechanical equipment [19]. This approach significantly enhances diagnostic accuracy and efficiency by performing multi-level, multi-dimensional analysis of sensor signals to extract features reflecting equipment health status. With diverse models designed to address distinct data pattern recognition challenges, this paper focuses on four key architectures: Recurrent Neural Networks (RNNs) [20], CNNs [21], Auto-encoders (AEs) [22], and Deep Belief Networks (DBNs) [23]. This selection is justified not only by their extensive application and relative maturity in fault diagnosis but, more critically, because they fundamentally represent four complementary and core data processing paradigms.
Deep Bayesian Networks (DBNs) embody the paradigm of unsupervised pre-training and deep feature generation, excelling at autonomously learning robust degenerate feature representations from unlabeled mechanical equipment vibration data [24]. Convolutional Neural Networks (CNNs) embody the paradigm of spatial local feature extraction, efficiently capturing fault-related local impact patterns from signals (especially image data after time-frequency transformation), making them suitable for analyzing vibration images or acoustic images of mechanical equipment [25]. AEs embody the paradigm of data compression and reconstruction learning, primarily serving feature dimensionality reduction, data denoising, and anomaly detection [26]. They are highly suitable for establishing baseline models of normal operation for mechanical equipment under unlabeled conditions. Recurrent neural networks and their variants (e.g., LSTM, GRU) embody the paradigm of temporal dynamic modeling. They comprehend temporal dependencies in signals [27], enabling diagnosis and prediction of fault evolution processes. These four paradigms systematically cover the core technological chain in fault diagnosis—from feature learning and spatial pattern recognition to time series analysis—collectively forming the technical foundation for tackling complex diagnostic tasks in mechanical equipment.
In recent years, several outstanding review papers have systematically examined the application of deep learning in fault diagnosis for general mechanical equipment. The review by Neupane et al. [28] not only systematically reviews the application of mainstream deep learning models such as CNNs, RNNs, and auto-encoders in the diagnosis of general components like bearings and gears, but it also places particular emphasis on summarizing cutting-edge paradigms such as reinforcement learning and federated learning. It comprehensively catalogs over 30 publicly available dataset resources, providing researchers with a crucial methodological foundation and experimental benchmarks. Zhao et al. [29] analyzed the application, advantages, and limitations of deep learning, graph embedding, and Transformer-based methods in rolling bearing fault diagnosis. Furthermore, they delve into major challenges in current research—such as complex network structures, insufficient information attention, difficulties in graph data processing, and long-term dependency modeling—and propose future directions focused on designing lightweight models, enhancing computational efficiency and robustness, and deepening the extraction of fault features. Xin et al. [30] provide a detailed summary of traditional data-driven approaches (including expert systems, signal decomposition, and machine learning models), traditional deep learning approaches (including auto-encoders, deep belief networks, convolutional neural networks, and recurrent neural networks), and emerging graph embedding methods and Transformer models. They highlight the advantages of these methods in feature extraction, temporal modeling, and non-Euclidean data processing while also pointing out common issues such as high model complexity, inadequate modeling of long-term dependencies, and sensitivity to data sparsity and noise. Garcia et al. [31] conducted a comprehensive analysis of signal processing, machine learning, deep learning, and hybrid physics-data-driven models in industrial equipment condition monitoring and predictive maintenance through a hybrid systematic literature review combining natural language processing and expert validation. They meticulously categorized mainstream technologies, explored key challenges and proposed solutions while integrating Industry 5.0 concepts to guide future research directions. Covering practical applications across diverse industrial equipment, this work provides essential reference for researchers and practitioners in related fields.
To sum up, deep learning, as a universal approximator, has shown strong modeling ability in many tasks across images, languages, industrial vision, business processes, financial time series, environmental prediction, agricultural quality inspection and even mechanical equipment fault diagnosis. This cross-domain success not only verifies the universality of its methodology but also provides a solid technical endorsement and migration potential for its further application in port equipment fault diagnosis, which is also a complex scenario with high noise, nonlinear and multimodal data characteristics.
For the field of fault diagnosis, the above research work provides a solid theoretical foundation. However, most existing reviews focus primarily on validating the methods themselves on generic components such as bearings and gears. They have not sufficiently addressed the unique challenges that arise when applying these advanced technologies to the specific complex industrial setting of “port equipment.” For instance: How can we address the challenges to model robustness posed by extreme operating conditions in ports? How can effective diagnostics be achieved despite scarce failure data? And how can diagnostic models be engineered for integration with existing port management systems?
Therefore, this paper aims to fill this research gap. Its core contribution lies not merely in listing four models but in constructing a systematic knowledge framework that bridges “general-purpose algorithms” to “port applications.” It not only reviews methodologies but also focuses on exploring their adaptability, challenges, and implementation pathways within port environments. The logical progression of this paper is as follows: First, it is grounded in deep learning models validated on general components and possessing strong transfer potential. Subsequently, it systematically analyzes their applicability, limitations, and future breakthrough directions when addressing the unique diagnostic challenges of port equipment.
Compared with the existing reviews, the main contributions of this paper are as follows:
- A systematic overview framework for port fault diagnosis applications is proposed. This paper goes beyond the traditional “model introduction—application case” paradigm and constructs a progressive discussion structure of “methodological basis—general component verification—port scenario challenge analysis—system deployment path”, which provides a complete guide from theory to practice for the implementation of deep learning technology in port equipment.
- This paper provides a comparative analysis of multidimensional and insightful deep learning models. This paper is not limited to the common accuracy comparison but constructs a qualitative and quantitative comparison framework from the core principles, applicable data types, calculation efficiency, noise resistance and port application potential and other dimensions, providing a profound decision-making basis for model selection under the port scene.
- This paper realizes the deep integration of deep learning and port diagnosis scenarios and systematically analyzes the domain-specific challenges. For the first time, this paper systematically identifies and deeply analyzes the core bottlenecks caused by the “high reliability paradox” of the port, such as data scarcity, model robustness under dynamic adverse conditions, and interpretability requirements under multi-system coupling and safety requirements and sorts out the corresponding adaptive technology path.
- A clear implementation path of system level project is outlined. This paper fills the practical gap from algorithm prototype to industrial system integration and discusses in detail the “cloud edge end” collaborative architecture, the integration scheme with SCADA/ERP and other port management systems, as well as the standardized deployment process, providing a clear road map for the industrial transformation of the research results.
Based on the above contributions, this paper follows a logical framework of “theoretical foundation—methodological review—challenge analysis—practical pathways—future outlook.” The introduction clarifies the background of intelligent operation and maintenance for port equipment and the application value of deep learning. Subsequently, the paper systematically explains the literature search and screening methods to ensure the comprehensiveness and reliability of the review. It then details the fundamental principles of four types of deep learning models and summarizes their application cases in the diagnosis of general mechanical components. Building on this foundation, it critically analyzes data, environmental, and system-level challenges encountered when transferring these methods to specialized port scenarios, proposing corresponding countermeasures. It then explores hardware architecture and integration pathways for system deployment from an engineering perspective. Finally, the paper clarifies its contributions through discussion and outlines future research directions—including lightweight approaches, interpretability, and integration of physical mechanisms—aiming to provide systematic guidance for the technological advancement of intelligent port equipment maintenance.
2. Literature Review Methodology
2.1. Literature Search Strategy
To comprehensively cover relevant domestic and international research, this review systematically searched two major Chinese and English academic databases: Web of Science (WoS) across all collections and China National Knowledge Infrastructure (CNKI). The search timeframe was restricted to January 2018 through October 2025 to focus on the latest achievements during the rapid development phase of deep learning in the field of fault diagnosis.
The search employed a combination strategy of “subject terms/keywords.” In the CNKI database, the basic search query used the Chinese term “深度学习” (deep learning) combined with “故障诊断” (fault diagnosis). In the WoS database, the corresponding search used “Deep learning” AND “fault diagnosis.” The preliminary search results indicate that since 2018, research attention in this field has been steadily increasing, with a significant upward trend in annual publication volume, as shown in Figure 1. As of October 2025, approximately 1800 relevant papers have been published this year, with the total expected to surpass the 2024 figure of nearly 2500 by year-end. This confirms the timeliness and significance of this review’s topic selection.
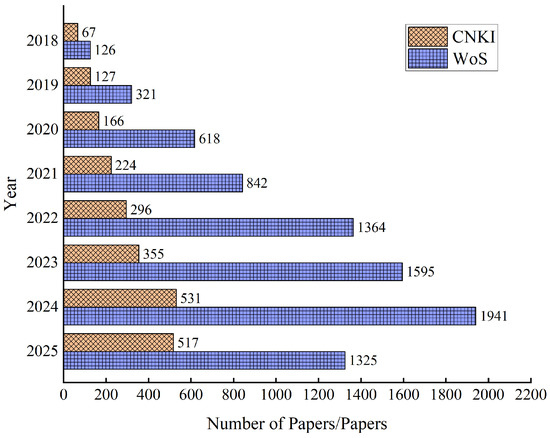
Figure 1.
Number of deep learning-related articles in the field of rotating machinery fault diagnosis.
2.2. Inclusion and Exclusion Criteria for Literature
Based on preliminary searches, explicit inclusion and exclusion criteria were established to precisely identify literature highly relevant to this research topic.
Inclusion Criteria: (1) Research must explicitly address the application of one of four target deep learning models—Deep Belief Networks (DBNs), Convolutional Neural Networks (CNNs), Auto-encoders (AEs), or Recurrent Neural Networks (RNNs) and their variants—in mechanical fault diagnosis. (2) The research subjects must be typical rotating mechanical components or systems, such as bearings, gearboxes, engines, etc. (3) The literature type must be journal articles or review papers.
Exclusion Criteria: (1) Research subjects involving non-rotating mechanical equipment or fields completely unrelated to port equipment operating conditions. (2) Literature where the full text is unavailable, duplicated publications, or works not written in Chinese or English.
Based on the aforementioned criteria, the search terms were refined and supplemented. Specific search queries were constructed for each of the four model categories, with the results shown in Figure 2. The Chinese search terms included the following: “深度学习 + 故障诊断 + 循环神经网络” (Deep learning + fault diagnosis + recurrent neural network), “深度学习 + 故障诊断 + 卷积神经网络” (Deep learning + fault diagnosis + convolutional neural network), “深度学习 + 故障诊断 + 自编码” (Deep learning + fault diagnosis + auto-encoder), and “深度学习 + 故障诊断 + 深度置信网络” (Deep learning + fault diagnosis + deep belief network). The English search terms include: “Deep learning + fault diagnosis + RNN,” “Deep learning + fault diagnosis + CNN,” “Deep learning + fault diagnosis + Auto Encoder,” and “Deep learning + fault diagnosis + DBN.” Analysis reveals that the Web of Science database contains a larger volume of literature overall compared to CNKI, reflecting the greater activity within the international academic community in this interdisciplinary research field.
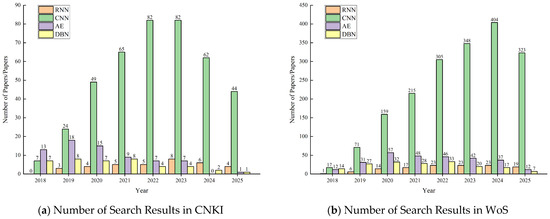
Figure 2.
(a) Number of search results for four models in CNKI; (b) Number of search results for four models in WoS.
2.3. Literature Search Process
Literature screening followed a systematic process. First, relevant literature was identified through preliminary database searches, with duplicate records excluded. Subsequently, initial screening was conducted by reviewing article titles and abstracts against inclusion and exclusion criteria. Full-text articles that passed this screening were downloaded and critically evaluated to assess their relevance to the study topic and depth of content. Ultimately, 130 articles were confirmed for inclusion in this review, undergoing in-depth qualitative analysis and discussion. This process ensured the comprehensiveness and representativeness of the selected literature.
2.4. Literature Quality Assessment
During the intensive reading phase, the 130 papers ultimately included underwent comprehensive evaluation across multiple dimensions, including methodological innovation, soundness of experimental design, representativeness of datasets, and credibility and comparability of results. Particular emphasis was placed on studies that proposed novel model architectures, effectively addressed specific diagnostic challenges, and were thoroughly validated on public datasets or real-world industrial data. This ensured that the technical approaches discussed in this review possess sufficient advancement and reference value.
3. Basic Architecture of Deep Learning Models
3.1. DBN
A typical DBN model primarily consists of multiple layers of RBMs and a single layer of Back-Propagation (BP) neural networks. Its core lies in employing a layer-wise greedy learning algorithm to optimize the connection weights between RBM layers [32], with its basic structure shown in Figure 3. In a DBN model, the output of neurons in the preceding layer serves as the input for neurons in the subsequent layer. This process repeats across each layer until the entire neural network completes training. This approach allows for the creation of multiple reasonable hidden and visible layers based on practical requirements, thereby enhancing the model’s breadth and depth. This improvement boosts the model’s learning and computational capabilities [33] and enables the exploration of deep characteristics within the raw data [34].
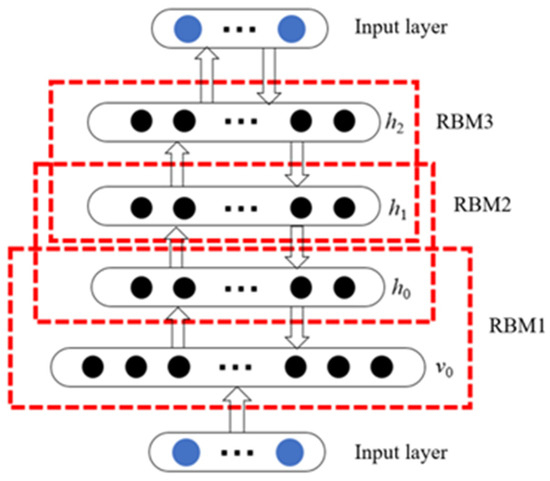
Figure 3.
Structure of DBNs.
Each RBM consists of bidirectionally connected hidden and visible layers, with connections between neurons at the same layer level removed [35]. The basic structure of an RBM is shown in Figure 4, where and denote the bias vectors of the hidden and visible layers, respectively. W represents the weight matrix between the hidden and visible layers. n and m denote the number of neurons in the hidden and visible layers, respectively. and denote the neuron states of the hidden and visible layers, respectively. denotes the state of the i-th neuron in the hidden layer and the j-th neuron in the visible layer. For states , the energy function of the RBM is defined as:
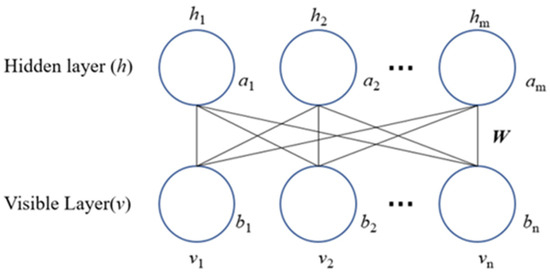
Figure 4.
Basic structure of RBM.
3.2. CNN
The CNN model [36] is essentially a multilayer perceptron, with its key features being the restricted connections between neurons and shared weights [37]. The basic structure of the CNN is shown in Figure 5, consisting of an input layer, convolutional layers, pooling layers, and fully connected layers. The reduced number of weights facilitates network optimization while lowering the risk of overfitting. Moreover, the ability to directly input multidimensional vibration signals into the network eliminates the need for data rearrangement during feature extraction and classification processes.
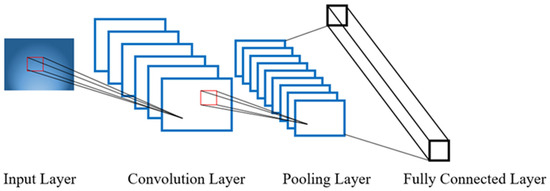
Figure 5.
Basic structure of a convolutional neural network.
The essence of a convolutional layer lies in performing convolution calculations by scanning the feature maps of the input layer with a convolution kernel, thereby extracting multidimensional features based on the objective function. The convolution operation is defined as:
In the formula: “” denotes the convolution operation; represents the input feature map combination; k denotes the convolution kernel connecting the i-th input feature map and the j-th output feature map; is the input to the l-th layer of the network; f is the activation function; is the bias term.
Pooling layers correspond one-to-one with convolutional layers. By performing operations such as averaging, calculating probability values, or finding maximum values on the feature points extracted from convolutional layers, pooling not only reduces feature dimensions but also increases channel capacity while preventing overfitting. The computational principle of pooling is illustrated in Figure 6, with its operation defined as follows:
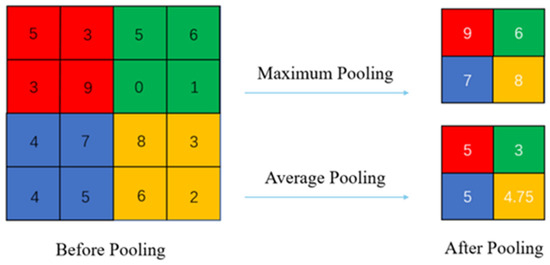
Figure 6.
The principle of pooling computation.
In the formula: β denotes the network multiplicative bias; down (*) denotes the pooling function.
After undergoing multiple convolutional and pooling layers, the CNN completes feature extraction and compression of the input signal. It then connects to a fully connected layer to obtain global information. The output from the fully connected layer is typically fed into a classifier employing Softmax logistic regression for classification. If the actual classification result deviates from the expected classification result, the error is propagated backward layer by layer to update the parameters of each network layer.
3.3. AE
Auto-encoders are neural networks designed to reconstruct input signals as faithfully as possible, comprising an encoder and a decoder. Their fundamental architecture is illustrated in Figure 7. If the output layer can effectively reconstruct the input layer, the hidden layers can serve as features representing the input signal [38]. The efficient representation of input data is termed encoding, typically with dimensions far smaller than the input data, enabling auto-encoders for dimensionality reduction. More importantly, auto-encoders serve as powerful feature detectors for pre-training deep neural networks.
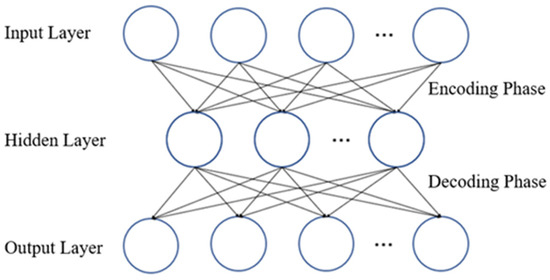
Figure 7.
AE structural diagram.
The process of data passing from the output layer to the hidden layer is called encoding, and its mathematical expression is:
Here, f is the activation function; is the vector of the hidden layer; is the input vector, with n denoting the number of neurons in the input layer; k denotes the number of neurons in the hidden layer; is the weight matrix connecting the input layer to the hidden layer; is the bias vector of the hidden layer.
The process of data passing from the hidden layer to the output layer is called decoding, and its mathematical expression is:
Among these: is the output vector of the reconstruction layer, where the number of neurons in the output layer is identical to that in the input layer. and are the bias vectors of the output layer.
3.4. RNN
Recurrent Neural Networks (RNNs) are a crucial type of neural network model in deep learning, primarily used for processing data with sequential characteristics (e.g., temporal order, logical sequence). Within their network architecture, the outputs of neurons can be fed back into other neurons for computation. This feature also endows RNNs with “memory” capabilities [39]. The basic structure of an RNN is shown in Figure 8, primarily consisting of an input layer, hidden layers, and an output layer. Through connections between nodes in the hidden layers, RNNs store historical information within the network architecture for use in subsequent computations. This mechanism also introduces dependency relationships among the input data.
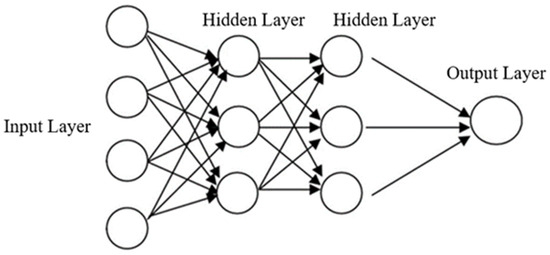
Figure 8.
RNN architecture diagram.
To address the issue of long-term dependencies in RNNs, Long Short-Term Memory (LSTM) networks [40] and Gated Recurrent Unit (GRU) networks [41] were developed as improvements upon RNNs. LSTM and GRU combine short-term and long-term memory through a “gate structure,” resolving the long-term dependency problem inherent in RNNs [42]. The essence of the “gate structure” is a fully convolutional neural network that performs phase-wise multiplication, utilizing the Sigmoid activation function.
4. Signal Preprocessing and Feature Extraction for Deep Learning
Vibration and acoustic monitoring signals from port equipment are inherently non-stationary, non-Gaussian time-varying signals, whose fault characteristics often manifest as transient impacts or dynamic changes in frequency components. Directly feeding these raw one-dimensional time-series signals into deep learning models is feasible but overlooks temporal dependencies and frequency-domain features within the signals, resulting in limited model performance. Effective signal preprocessing and feature extraction aim to condense and highlight the key fault-related information implicit in the signals, transforming it into a form more suitable for deep learning models to understand and process. This constitutes a critical step in enhancing the diagnostic model’s performance, robustness, and generalization capability.
4.1. Signal Preprocessing Methods
Signal preprocessing first requires data cleaning and quality assessment, which form the foundation for ensuring the reliability of subsequent analysis. The focus of data cleaning lies in addressing outliers and missing data issues. Typically, statistical 3σ criteria or box plots are employed to identify and handle outliers [43], thereby eliminating the impact of sensor failures or transmission interference. For missing values, reasonable filling can be achieved through interpolation methods [44] or deep learning-based approaches to ensure data continuity. Concurrently, signal quality must be assessed using quantitative parameters such as signal-to-noise ratio and kurtosis metrics, providing scientific basis for selecting subsequent processing strategies. This step is particularly crucial for ensuring the reliability of long-term monitoring data for port equipment.
In signal denoising, due to the complex operating environment of port equipment, signals are often subject to intense noise interference, necessitating the adoption of multiple effective denoising methods. Traditional filtering techniques, including low-pass, high-pass, and band-pass filters, are suitable for noise removal within specific frequency bands. Wavelet threshold denoising leverages the multi-resolution properties of wavelet transform (WT) [45] to suppress noise at different scales. Experimental modal decomposition (EMD) [46] achieves signal reconstruction by decomposing and removing noise-dominated intrinsic modal function (IMF) components; deep learning approaches utilize network structures like auto-encoders to learn the mapping relationship between noise and useful signals. The judicious selection of these methods is crucial for extracting faint fault features in highly noisy backgrounds.
Data standardization and augmentation are vital steps for enhancing model training effectiveness and generalization capabilities. Normalization scales data to a specific range (e.g., [0, 1] or [−1, 1]) to eliminate dimensional effects; standardization transforms data into a normal distribution with mean 0 and standard deviation 1, accelerating model convergence. Addressing the scarcity of fault samples in port equipment, data augmentation techniques like noise injection and temporal stretching expand training datasets, effectively enhancing model robustness and generalization capabilities.
4.2. Feature Extraction Technology
Core feature extraction methods include time-domain feature extraction and frequency-domain feature extraction. Time-domain features are extracted directly from signal waveforms, encompassing statistical features (mean, variance, peak, kurtosis, skewness, etc.), dimensionless features (waveform factor, peak factor, pulse factor, etc.), and temporal features (autocorrelation function, cross-correlation function, etc.). These features are computationally straightforward, possess clear physical significance, and effectively reflect signal amplitude characteristics and distribution patterns, making them suitable for rapid assessment of port equipment operational status.
Frequency-domain features involve transforming signals to the frequency domain via Fourier transform for analysis. They extract spectral characteristics (spectral centroid, frequency variance, mean square frequency, etc.), spectral line features (amplitude and phase information of primary frequency components), and envelope spectrum features. These reveal signal periodicity and resonance characteristics, making them particularly suitable for fault diagnosis in rotating components like bearings and gears. They hold significant value in monitoring port equipment transmission systems.
4.3. Time-Frequency Analysis Method
Time-frequency analysis simultaneously reveals the energy distribution of signals across both time and frequency dimensions, making it a powerful tool for processing non-stationary signals. The Short-Time Fourier Transform (STFT) [47] segments a signal using a fixed-length sliding window function, applying a Fourier transform to each segment to reveal how the signal’s frequency components vary over time. The result is a spectrogram. The limitation of STFT lies in its time-frequency resolution, constrained by the Heisenberg Uncertainty Principle, which prevents achieving both high time resolution and high frequency resolution simultaneously.
Wavelet Transform (WT) analyzes signals using scalable, shiftable mother wavelet functions, exhibiting multiresolution analysis characteristics: short time windows achieve high temporal resolution for high-frequency components, while long time windows achieve high frequency resolution for low-frequency components. This makes WT particularly suitable for capturing transient impact components in port equipment vibration signals. Empirical Mode Decomposition (EMD) is an adaptive signal decomposition method that breaks down complex signals into a series of intrinsic mode functions (IMFs). Each IMF component contains information about a specific frequency band within the original signal. This method is entirely data-driven, requiring no predefined basis functions.
Additionally, Variational Modal Decomposition (VMD) [48] achieves adaptive signal decomposition through a variational framework, effectively avoiding modal aliasing issues. The Hilbert-Huang Transform (HHT) [49] combines EMD with the Hilbert transform to provide a high-resolution time-frequency representation.
The aforementioned time-frequency analysis methods each possess distinct characteristics. Their core principles and applicability are summarized in Table 1. Understanding these differences forms the foundation for their subsequent effective integration with deep learning models.

Table 1.
Characteristics comparison of major time-frequency analysis methods.
4.4. A Fusion Paradigm of Time-Frequency Analysis and Deep Learning
Time-frequency analysis methods provide deep learning with rich, high-information-density input features. The effective integration of these two approaches has formed two primary technical paradigms, offering robust technical support for port equipment fault diagnosis.
The feature input paradigm employs time-frequency analysis as a fixed front-end feature extractor. By converting one-dimensional raw vibration signals into two-dimensional time-frequency images, it fully leverages deep learning’s strengths in image processing. Specifically, port equipment monitoring signals are converted into time-frequency images—such as spectrograms or wavelet scale maps—via methods like STFT, CWT, or EMD. These images are then fed into convolutional neural networks for deep feature learning and classification. This “signal → image → diagnosis” technical pathway transforms fault diagnosis into an image recognition problem, yielding significant practical results. It is particularly well-suited for handling impact-induced fault characteristics in port equipment vibration signals, such as typical failure modes like bearing spalling and gear tooth breakage.
The collaborative analysis and decision fusion paradigm emphasizes deeper synergy between time-frequency analysis and deep learning at the feature level. This approach first decomposes signals into multiple components using time-frequency analysis techniques like EMD or VMD. Statistical features are then extracted from each component to form feature vectors, which are fed into deep belief networks or fully connected networks for diagnostic analysis. An alternative implementation path involves establishing separate deep learning models for different components, followed by decision-level fusion. This paradigm offers greater flexibility, leveraging the strengths of time-frequency analysis in signal decomposition and deep learning in modeling nonlinear relationships. It is particularly well-suited for comprehensive multi-source signal analysis and composite fault diagnosis in complex port equipment.
In practical applications, both paradigms offer distinct advantages. The feature input paradigm fully leverages CNNs’ exceptional capability in image feature extraction, offering a straightforward diagnostic workflow and excelling in single fault mode identification. The collaborative analysis and decision fusion paradigm, through multi-level feature extraction and model fusion, demonstrates greater adaptability when handling complex faults and system-level diagnostic challenges. For the uniquely complex operational environments of port equipment, appropriate fusion strategies can be selected based on specific diagnostic requirements to achieve optimal diagnostic outcomes.
4.5. Feature Selection and Dimension Reduction
Feature selection and dimensionality reduction are crucial steps in optimizing model performance. Feature selection aims to identify the most effective subset of features from a large number of extracted features. Filtering methods [50] evaluate feature importance based on statistical metrics such as correlation coefficients and chi-square tests; wrapping methods [51] select optimal feature subsets through model performance feedback, such as recursive feature elimination; embedding methods perform feature selection automatically during model training, such as LASSO regression.
Feature dimensionality reduction maps high-dimensional features to lower-dimensional spaces through mathematical transformations. Principal Component Analysis (PCA) preserves key feature information via linear transformations; Linear Discriminant Analysis (LDA) retains class discriminative information while reducing dimensions [52]; t-SNE, as a nonlinear dimensionality reduction method [53], facilitates visualization analysis of high-dimensional data. When processing multi-sensor fusion data from port equipment, these techniques can effectively eliminate redundant information and enhance diagnostic efficiency.
4.6. Special Considerations for Port Equipment
The unique operating environment of port equipment imposes special demands on signal preprocessing. In terms of environmental adaptability, preprocessing methods must withstand high temperatures, high humidity, and highly corrosive marine conditions. For real-time requirements, online monitoring systems demand preprocessing algorithms with high computational efficiency. Regarding multi-source data fusion, integration of multi-sensor information such as vibration, acoustic, and temperature data is essential. Concerning adaptability to operational variations, preprocessing strategies must accommodate drastic changes in equipment load and speed. These specialized considerations must be integrated throughout the entire preprocessing workflow design to ensure the diagnostic system’s reliability in real industrial environments.
5. Applications of Deep Learning in the Field of Fault Diagnosis
In the field of equipment fault diagnosis, traditional execution processes primarily consist of signal collection, data processing, feature extraction, and feature recognition. Integrating equipment operating parameters and processes with deep learning enables the establishment of feature relationships with deep-level correlated variables. The application approach can be summarized as follows:
- (1)
- After processing signal data, deep learning methods are utilized to reveal the intrinsic features of the data, thereby avoiding errors from manual selection. After feature selection, widely adopted fault diagnosis techniques are applied to partially optimize diagnostic outcomes.
- (2)
- Following signal data processing, deep learning methods are applied separately to data with low and high correlation for feature selection. This approach significantly simplifies the process and reduces computational load.
- (3)
- Collected signals are imported into a predefined model to output desired target results. Through feature selection learning and result classification during the process, the entire workflow is simulated and learned. This approach reduces complexity and minimizes errors, enabling comprehensive optimization across all steps. However, it may increase computational load and potentially impact model generalization.
5.1. Diagnostic Methods and Application Potential of DBNs
5.1.1. Fault Diagnosis Method Based on DBN
Currently, DBN-based fault diagnosis methods are widely applied in fields such as rolling bearings, gearboxes, and hydraulic pipelines.
Given the limitations of traditional rolling bearing fault diagnosis methods (e.g., shallow network structures and reliance solely on time-frequency component features), Guo et al. [54] proposed a novel fault diagnosis approach based on the DBN model, incorporating a multi-domain feature fusion algorithm. The main steps are as follows: First, vibration acceleration data is processed using noise reduction algorithms to extract time-domain, frequency-domain, and IMF energy features. Next, efficient features are selected and subjected to dimensionality reduction and fusion. Finally, the processed features are input into the DBN for fault diagnosis. The statistical results demonstrate that compared to traditional methods, this approach significantly improves accuracy while reducing analysis time, exhibiting good applicability across various fault types.
During the fault diagnosis process of the DBN model, the most time-consuming part is the structural debugging of the network layer. To reduce computation time and improve the accuracy of bearing fault diagnosis, Li Yibing et al. [55] improved the DBN model based on the particle swarm optimization algorithm. To address parameter assignment issues within the model, this algorithm employs adaptive time estimation for minor adjustments. It then extracts low-dimensional fault features from raw vibration acceleration data and utilizes a Softmax classifier to distinguish fault types.
Given the complexity of equipment operating environments, extracting features from vibration acceleration signals presents significant challenges, making accurate feature extraction crucial. Ren Zhaohui et al. [56] employed an unsupervised feature extraction method. Considering the high feature extraction efficiency of the DBN model, they utilized one-dimensional mapping to assign DBN features of modal components to a particle swarm optimization support vector machine, thereby completing bearing fault diagnosis.
To address gearbox fault diagnosis challenges, Zheng Pengfei et al. [57] proposed two fault diagnosis algorithms based on the DBN model, utilizing variational modal decomposition and wavelet denoising techniques, respectively. The results demonstrated that the DBN algorithm, grounded in gearbox big data, not only identifies gearbox faults but also accurately classifies fault types, exhibiting outstanding diagnostic performance.
To address the issues of low accuracy and poor generalization in intelligent fault diagnosis caused by poor training data quality, Tang et al. [58] proposed an improved Bi-DBN method for bearing fault diagnosis. This method introduces a reverse generation component into the standard DBN, reducing imbalance rates and enhancing feature learning efficiency. Additionally, parameters optimized using a quantum genetic algorithm further improved the fitting accuracy of the Bi-DBN model.
To address the “black-box” nature of existing deep neural network (DNN)-based fault diagnosis models for shore-to-ship container crane (STSC) trolley mechanisms—which fail to provide rational explanations for decision-making—Liao et al. [59] proposed a knowledge-based reverse deep belief network (KBRDBN). This approach constructs an efficient neural-symbolic system by extracting two types of relational knowledge: confidence rules and soft rules. Compared to other typical DNNs and neural-symbolic models, the KBRDBN achieves higher accuracy, effectively performing knowledge discovery and uncertainty reasoning, with an average diagnostic accuracy of 98.8%.
To address the performance dependency of DBN fault diagnosis models on the number of hidden layer neurons and the difficulty in determining optimal structures, Sun et al. [60] proposed an IHHO-DBN-ELM-based fault detection method. This approach incorporates the Improved Harris-Hawke Optimization (IHHO) algorithm into the optimization of the DBN and Extreme Learning Machine (ELM). It first employs the Cyclically Recurrent Convolutional Blind Deconvolution (CYCBD) algorithm to denoise bearing vibration signals, followed by IHHO of the DBN structure. The optimized DBN-ELM model achieves a fault classification accuracy of 99.17%, demonstrating significant performance enhancement.
Addressing the limited predictive capability of traditional methods for bearing measurement data with strong dynamic characteristics and nonlinearity, Wang et al. [61] proposed a Continuous Delay Hidden Layer Deep Belief Network (CDHLDBN). They constructed a KPCA-CDHLDBN bearing life prediction model based on Kernel Principal Component Analysis (KPCA) preprocessing. The results demonstrate that this model better predicts nonlinear dynamic time series data, exhibiting superior prediction accuracy and faster prediction speed compared to other deep learning models.
Vibration signals extracted from rolling bearings are often mixed with noise signals, making it difficult to identify fault characteristic parameters using time-domain and frequency-domain methods. Zhao et al. [62] proposed a novel rolling bearing fault diagnosis method based on wavelet packet decomposition (WPD) for feature extraction and the chaotic sparrow search optimization algorithm (CSSOA) for optimizing DBN parameters, establishing the WPD-CSSOA-DBN fault diagnosis model. The results demonstrate that this method exhibits enhanced feature extraction capabilities and outstanding rolling bearing fault diagnosis performance.
To address the scarcity of labeled samples and the homogeneity of monitoring data in rotating machinery fault diagnosis, Han et al. [63] proposed a novel multi-source heterogeneous information fusion (MSHIF) network approach. By designing data-augmented deep belief networks (DEDBN) and data-augmented one-dimensional convolutional neural networks (DE-1DCNN), this method enables more comprehensive and robust identification of rotating machinery health status under limited datasets. The results demonstrate that MSHIF achieves average recognition accuracies of 99.491%, 99.143%, and 99.037% across three distinct case studies.
To address the randomness of DBN training parameters, Xu et al. [64] proposed a DBN optimization method based on the Sparrow Search Algorithm (SSA), combined with Wavelet Transform (WT) and Ensemble Empirical Mode Decomposition (EEMD) to extract multidimensional features from vibration signals. This approach significantly enhanced fault diagnosis accuracy and effectiveness, achieving a remarkable 99.17% recognition rate. It outperformed traditional feature sets and mainstream diagnostic methods like PSO-DBN and SSA-SVM, demonstrating high generalization capability and stability.
To address the challenge of effectively utilizing spatial features in time-series signals for bearing fault classification under varying operating conditions, Lin et al. [65] proposed a novel model named SPRout-DBN. This model first encodes vibration signals into two-dimensional images using the Gramian Angular Difference Field (GADF). It then extracts fixed-size time-fused feature vectors through a residual network with spatial pyramid pooling. Finally, a Deep Binary Network (DBN) performs classification and cross-domain learning. The method achieved accuracies of 99.81% and 99.41% on two datasets, demonstrating its robustness and effectiveness across diverse operational environments.
To address the lack of interpretability in bearing fault diagnosis, poor generalization under varying operating conditions and noisy environments, and reliance on large amounts of labeled data, Zhong [66] proposed a multi-source physical information neural network, M-IPISincNet. This approach designs a physical information convolution layer based on an enhanced SincNet architecture. It integrates prior knowledge of fault frequency, employs multi-scale convolutions to extract high- and low-frequency features, and incorporates a Deep Binary Network (DBN) for feature fusion of vibration and current signals. The results demonstrate that the model maintains high accuracy even in zero-signal-to-noise-ratio (SNR) noise environments while featuring fewer parameters and low memory consumption.
To address the insufficient generalization capability of diagnostic models caused by sparse target domain labels, poor pseudo-label quality, and significant inter-domain distribution differences, Wang et al. [67] proposed a semi-supervised domain adaptation method, CSS-DADBN. This approach utilizes RNNs to generate pseudo labels, employs the Chaotic Sparrow Search Algorithm (CSSOA) to optimize confidence and entropy thresholds for selecting high-quality pseudo labels, and leverages a DBN for feature extraction and fusion. It also incorporates MMD loss to mitigate inter-domain distribution differences. The results demonstrate the model’s robust generalization capability and stability in cross-domain tasks.
Currently, most gear fault diagnosis methods cannot distinguish the severity of faults due to the high similarity among monitoring signals. This necessitates enhancing the sensitivity, stability, and accuracy of diagnostic methods, thereby increasing diagnostic complexity. To address this issue, Gai et al. [68] proposed a DBN model based on the Sparrow Search Algorithm and successfully applied it to gear fault severity diagnosis.
Addressing the challenge of diagnosing pipeline faults in hydraulic systems, Huang Xufang et al. [69] extracted time-domain and frequency-domain feature parameters from hydraulic pipeline vibration acceleration data collected over multiple time intervals. They employed a DBN model to identify hydraulic pipeline faults. The results demonstrated that the DBN model not only accurately identified the operational status of hydraulic pipelines but also distinguished between single faults and concurrent faults, achieving an overall accuracy exceeding 99%.
In summary, the general workflow for equipment fault diagnosis using the DBN model is as follows: (1) Collect real-time data from the equipment requiring diagnosis. (2) Screen the data, removing unreasonable entries, and divide it into training and test sets. (3) Establish the DBN diagnostic model, obtain preliminary results using the training set, and adjust the model based on actual data. (4) Validate the trained diagnostic model using the test set.
5.1.2. Diagnostic Potential of DBN in Port Equipment
Based on the above analysis, Deep Belief Networks demonstrate unique application value and development prospects in the field of port equipment fault diagnosis. The DBN’s powerful unsupervised feature learning capability makes it particularly well-suited to address the scarcity of fault samples encountered in port equipment. Large-scale port handling equipment such as gantry cranes and yard cranes exhibit high reliability and low failure rates during operation, resulting in extremely limited fault samples available for training. DBNs can autonomously learn deep feature representations from vast amounts of unlabeled normal operation data, establishing accurate health state baseline models. By monitoring shifts in feature distributions, they enable early fault warning, effectively mitigating the reliance of traditional methods on large fault sample sets.
In handling complex operating conditions, the DBN demonstrates exceptional adaptability through its deep nonlinear network architecture. Port equipment experiences drastic load and speed variations during operation, resulting in highly non-stationary signal characteristics. The DBN learns essential fault features that remain relatively stable despite operational changes. Specifically, an enhanced DBN model combined with intelligent optimization algorithms can adaptively adjust network parameters, maintaining stable diagnostic performance under variable conditions. Furthermore, the DBN’s feature-level fusion capability enables effective integration of multimodal monitoring data such as vibration and current signals, providing technical support for system-level health management of complex port equipment.
Notably, breakthroughs in DBN interpretability open possibilities for its application in safety-critical port environments. Knowledge-based reverse deep belief networks transform “black-box” decision processes into understandable confidence rules by constructing neural-symbolic systems, significantly enhancing the credibility of diagnostic outcomes. This feature is crucial for the safe operation of port equipment, enabling intelligent diagnostics to provide reliable decision support for field engineers. Furthermore, the DBN’s capabilities in processing time-series data lay the foundation for its application in predictive maintenance. By constructing enhanced network architectures, it effectively captures equipment performance degradation trends, supporting the transition from “preventive maintenance” to “predictive maintenance” operational models.
With ongoing advancements in model optimization techniques and the deepening of port intelligentization initiatives, the DBN will demonstrate broader application prospects in addressing critical challenges such as resolving the “high reliability paradox” and achieving precise predictive maintenance. This will provide robust technical support for establishing intelligent operation and maintenance systems for port equipment.
5.2. Diagnostic Methods and Application Potential of CNNs
5.2.1. Fault Diagnosis Method Based on CNN
The original CNN model required two-dimensional input data. Implementation approaches for CNNs in fault diagnosis can be broadly categorized into two types: starting from the input data, converting the data type into two-dimensional format; or starting from the model structure, transforming it into a form that accepts one-dimensional data.
To effectively diagnose rolling bearing faults, Xu et al. [70] proposed a diagnostic model based on the Online Transfer Convolutional Neural Network (OTCNN). The OTCNN first constructs an Offline Convolutional Neural Network (Off-CNN) and an Online Convolutional Neural Network (On-CNN) with identical structures, using multi-channel data fusion and grayscale image conversion as model inputs. Then, source domain features and model parameters in the fully connected layer are obtained from the pre-trained Off-CNN; finally, the parameters of On-CNN are initialized using Off-CNN parameters, achieving domain adaptation through pre-trained source domain features. The results demonstrate that the OTCNN model can reduce training time by half while maintaining accuracy.
For electric motor fault diagnosis, Junior et al. [71] designed a multi-head 1D CNN model based on vibration signals to distinguish six distinct motor faults. Vibration signals measured in two directions were simultaneously input to the multi-head 1D CNN model for training. The results demonstrated the model’s capability to successfully extract features and diagnose motor faults while enabling real-time monitoring of motor operational status.
In the field of hydraulic transmission systems, Tang et al. [72] applied Bayesian Optimization (BO) to adaptive deep learning and employed a CNN model for fault feature extraction and classification in hydraulic piston pumps. First, acoustic signals were converted into time-frequency distributions via continuous wavelet transform. Second, an initial CNN model was established by setting initial parameters to determine the range for each parameter to be optimized. Third, the optimal parameter combination was selected based on BO to construct the CNN-BO model. Finally, the diagnostic efficiency of the CNN-BO model was analyzed using confusion matrices and t-distributed stochastic neighborhood embedding (TSNE). The results demonstrated that the CNN-BO model exhibits higher accuracy and robustness for hydraulic piston pump fault diagnosis.
Regarding rotating machinery fault diagnosis, traditional methods may be constrained by fault features and diagnostic models. Consequently, Li et al. [73] combined Mel-frequency cepstral coefficients (MFCCs) with a Multi-Fusion Convolutional Neural Network (MFCNN) to propose a novel fault diagnosis method based on MFCC feature extraction. This approach not only enhances the quality of obtained fault features but also improves diagnostic performance under varying noise conditions.
To address issues such as the inability to simultaneously extract spatio-temporal features from fault signals, loss of critical feature information, and poor performance in noisy environments, Chen et al. [74] proposed an electric motor bearing fault diagnosis model (ECMCTP). This model utilizes continuous wavelet transform (CWT) to convert one-dimensional vibration signals into two-dimensional time-frequency images, then concurrently extracts spatial and temporal features through parallel CNN and Transformer branches. The results demonstrate that the ECMCTP model achieves 100% fault diagnosis accuracy under noise-free conditions and exhibits superior noise immunity even at low signal-to-noise ratios.
Addressing the challenge of distinguishing and isolating faults with similar frequency characteristics in the frequency domain during composite fault diagnosis of rotating machinery, Wang et al. [75] proposed a composite fault diagnosis method for motor drive systems. This method combines a physically parameterized polar diagram (PPD) enhanced by adaptive filtering with SSA-optimized rotationally invariant convolutional neural networks (SSA-RICNN). The results demonstrate higher diagnostic accuracy for composite faults.
Addressing the challenge of unsatisfactory fault identification results from traditional methods under limited sample sizes and complex environmental noise interference, Yang et al. [76] proposed a fault diagnosis model based on a hybrid framework combining Variational Modal Decomposition (VMD) optimized by an Improved Black Kite Algorithm (IBKA), CNN, and Twin Extreme Learning Machine (TELM). Research indicates that this model maintains robust fault diagnosis capabilities across varying degrees of noise interference.
Addressing challenges in rotary machinery fault diagnosis signals—including complex spectral components, high-energy noise, wide bandwidth, and intricate pattern recognition—Liu et al. [77] proposed a fault diagnosis method based on an improved minimum control recursive averaging-improved spectral subtraction (IMCRA-ISSA) and CNN-TCN model. First, IMCRA-ISSA is applied for signal denoising. Subsequently, the completely integrated empirical mode decomposition with adaptive noise (CEEMDAN) algorithm extracts multi-scale intrinsic mode functions. Finally, the CNN-TCN diagnostic model identifies mechanical fault signals under varying noise levels and operating conditions. This approach effectively reduces noise in mechanical fault signals, addressing the challenge of wideband noise interference in signal processing.
To address the challenges in fault diagnosis for rotating machinery under conditions of strong noise, significant time-varying characteristics, and multi-condition transfer learning scenarios, Pang et al. [78] proposed a WGS-CNN-based model. By integrating WT with a CNN, they improved the initialization strategy for convolutional layers and introduced adaptive Gaussian windows (GW) and quadratic functions to enhance feature extraction capabilities and noise resistance. The results demonstrate that this model consistently achieves over 90% noise resistance on public datasets, significantly outperforming other models.
Addressing fault diagnosis challenges in rotor motors during variable-speed operation—specifically in extracting spatial, temporal, and hierarchical features—Yang et al. [79] proposed a hybrid CNN-BiLSTM-MHSA model. This approach combines the CNN’s spatial pattern recognition capabilities, BiLSTM’s ability to capture long- and short-term temporal dependencies, and MHSA’s key feature enhancement capabilities. Research indicates that its fault diagnosis accuracy reaches 99.33%, outperforming CNN, LSTM, and CNN-LSTM.
To address the issues of extremely low signal-to-noise ratio in early-stage rolling bearing scenarios and the significant impact of input signal length and segmentation strategies on diagnostic accuracy, Zhong et al. [80] proposed an intelligent diagnostic method based on WI-CNN. This approach utilizes Gramian Angular Field theory to construct high-resolution fault features, employs an adaptive stochastic resonance (ASR) strategy driven by particle swarm optimization for denoising preprocessing, performs data segmentation and resampling via waveform cross-correlation coefficients, and finally feeds the data into a CNN for intelligent fault detection. This approach demonstrated high diagnostic accuracy, fast iteration speed, and strong algorithmic robustness in a mixed diagnostic strategy for 10 different fault types on a self-built test platform.
Addressing the issue of diminished feature extraction capability in high-noise environments, Yin et al. [81] proposed an attention-driven hybrid model based on IENEMD and parallel multi-scale CNN. This model utilizes IENEMD to decompose raw vibration signals for noise reduction, while an attention-driven parallel multi-scale CNN adaptively amplifies information-rich components to generate robust fault features. Three case studies and comparative experiments across nine different signal-to-noise ratio (SNR) levels validate the superior performance of this hybrid model.
Addressing the susceptibility of rolling bearings to noise interference under complex operating conditions and the low diagnostic accuracy of traditional methods, Shao et al. [82] proposed a hybrid framework for rolling bearing fault diagnosis based on Variational Modal Decomposition-Discrete Wavelet Transform (VMD-DWT) and a hybrid attention mechanism deep separable convolutional neural network-bidirectional long short-term memory network (HADS-CNN-BiLSTM). This approach achieved a 99.58% fault diagnosis accuracy on the CWRU dataset and 100% accuracy on the Xi’an Jiaotong University (XJTU-SY) dataset.
To address overfitting and poor generalization in rolling bearing fault diagnosis due to sparse fault samples, Bian et al. [83] proposed a Siamese Neural Network (SNN) model based on a wide first-layer kernel deep convolutional neural network (WDCNN) and a bidirectional long short-term memory network (BiLSTM). This model maintains robust diagnostic performance under strong noise interference, effectively resolving overfitting issues in deep learning models under small-sample conditions while enhancing the model’s generalization capability and robustness.
To address challenges such as complex data types and insufficient training samples in mechanical fault diagnosis, Longdengren [84] proposed a fault diagnosis method based on one-dimensional data augmentation and a CNN model. First, a stacked auto-encoder was enhanced using a backpropagation neural network (BPNN) with a softmax classifier to augment one-dimensional vibration signals. Then, the augmented dataset is directly converted into two-dimensional images to train the CNN. This model not only ensures diagnostic efficiency under conditions of numerous fault types and limited training data but also achieves a training accuracy exceeding 98%.
In the field of track monitoring, CNN models can also meet practical application requirements. High false negative rates, high false positive rates, and poor robustness are the primary issues with existing track damage monitoring methods. Han Qiang et al. [85] proposed a multi-level feature fusion-based rail surface damage monitoring method. First, rail images are captured, and damaged areas are annotated. Second, a training strategy is established to increase the quantity and diversity of the training set. Finally, a multi-level feature fusion-based object detection network is trained to automatically detect damaged rail sections. The experimental results demonstrate optimal performance when constructing the damage dataset, meeting practical rail damage detection requirements.
Due to the poor stationarity of planetary gearbox vibration signals, substantial prior knowledge and diagnostic expertise are required to identify and interpret fault characteristics. Hu et al. [86] proposed an intelligent fault diagnosis method based on Empirical Mode Decomposition (EMD) and Deep Convolutional Neural Networks (DCNNs), which accurately and effectively classifies the operating status and fault types of planetary gearboxes. The general procedure involves first performing EMD on the vibration signal to obtain Intrinsic Mode Functions (IMFs). The DCNN then fuses IMF components to extract features, which are finally recognized by a classifier to achieve automatic fault diagnosis. Additionally, Yao Mingjing et al. [87] proposed a gearbox fault diagnosis model based on an improved CNN model and validated it using a gearbox experimental platform. The test results demonstrated that this model can effectively extract gearbox fault vibration signals, distinguish different fault types, and classify them with high accuracy (up to 99.2%).
Of course, the application of the CNN extends beyond the aforementioned domains. For instance, in hydraulic pump fault diagnosis, Du Mingzhe et al. [88] proposed an intelligent fault diagnosis method based on empirical wavelet transform (EWT) and CNN. This approach enables accurate and efficient classification of hydraulic pump operating states and fault types.
5.2.2. Diagnostic Potential of CNN in Port Equipment
Based on a systematic analysis of literature on the application of convolutional neural networks in fault diagnosis, CNN models demonstrate unique and broad application prospects in the field of intelligent operation and maintenance for port equipment. The exceptional spatial feature extraction capability of CNNs provides significant advantages when processing complex monitoring data from port equipment. By converting vibration and acoustic signals into two-dimensional time-frequency images through time-frequency analysis techniques, followed by deep feature learning using CNNs, this “signal → image → diagnosis” technical pathway effectively captures transient impact fault characteristics unique to port equipment. This approach provides a powerful technical means for condition monitoring of critical rotating components such as bearings and gearboxes.
In addressing the challenges of complex port environments, CNNs demonstrate exceptional adaptability. To tackle the harsh conditions of high noise and strong interference at port sites, researchers have developed various enhanced CNN architectures. These include parallel multi-scale CNNs incorporating attention mechanisms and improved models integrating physical prior knowledge. Such innovative structures significantly enhance diagnostic performance under low-signal-to-noise-ratio conditions. Notably, transfer learning-based online transfer CNN models rapidly adapt to the dynamic operating conditions of port equipment through domain adaptation techniques. This approach substantially reduces model training time while maintaining diagnostic accuracy, offering a viable solution for real-time intelligent monitoring of port machinery.
CNNs also excel in multi-source information fusion and specialized component diagnostics. By constructing multi-branch network architectures, CNNs effectively integrate multi-modal monitoring data—including vibration, current, and acoustic signals—enabling more comprehensive equipment condition assessments. In specialized port equipment inspection, CNN-based visual detection technology can be directly applied to intelligent recognition in specific scenarios such as rail surface damage, container lock button status, and wire rope defects, effectively complementing traditional vibration diagnostics. This multi-path fusion application enables CNNs to meet the diverse diagnostic demands of port equipment, ranging from general components to specialized facilities.
With the continuous advancement of deep learning technology, CNNs will see deeper integration into port equipment fault diagnosis. Their unique advantages in interference resistance, cross-operating-condition adaptability, and multi-source data fusion provide robust technical support for resolving diagnostic challenges in port’s unique environments. By integrating with emerging technologies like edge computing and digital twins, CNNs are poised to play a more pivotal role in port equipment predictive maintenance systems, laying a solid technical foundation for building intelligent, precision-driven port equipment operation and maintenance management systems.
5.3. Diagnostic Methods and Application Potential of Auto-Encoders
5.3.1. Fault Diagnosis Method Based on Auto-Encoder
Currently, addressing the data distribution imbalance issue in mechanical system monitoring and diagnostic methods, Zhao et al. [89] designed a bearing-rotor system imbalance fault diagnosis model based on the Normalized Conditional Variational Auto-Encoder with Adaptive Focal Loss (NCVAE-AFL). The NCVAE-AFL model enhances feature learning capabilities and improves the generalization performance of the diagnostic framework.
Intelligent gearbox fault diagnosis often faces the challenge of insufficient typical fault samples. In response, He et al. [90] proposed a novel diagnostic model: the Deep Transfer Multi-Wavelet Auto-Encoder (BTMWAE). First, key features from gearbox vibration signals are extracted and learned using the BTMWAE model. Next, high-quality samples are selected for pre-training. Finally, the obtained parameters are transferred to the target model to perform fault diagnosis. Experiments demonstrate that this method can not only assess the severity of single faults in gearboxes but also identify compound faults.
With the growing demand for intelligent mechanical fault diagnosis, transfer learning techniques have been widely applied in data-driven enhancement. However, the scarcity of labeled data samples remains a challenge. Therefore, Li et al. [91] proposed a deep learning-based method to transfer fault diagnosis information collected from one machine to others. First, an AE model is employed to project feature data from different machines into a common subspace. Second, a cross-machine adaptive algorithm is used for knowledge generalization, mitigating data distribution discrepancies caused by machine variations. Applied to diverse rolling bearing datasets, this approach validates the feasibility of transferring fault diagnosis information across machines, offering a novel and promising method for mechanical equipment fault diagnosis.
In noisy environments, AE-based intelligent fault diagnosis struggles to leverage data collection effectively. To address this, Zhang et al. [92] proposed a novel Ensemble Deep Contractive Auto-Encoder (EDCAE). First, multiple Deep Contractive Auto-encoders (DCAEs) are designed to automatically learn invariant feature representations, effectively handling diverse noisy data. Second, Fisher discriminant analysis is applied to select low-dimensional features, which are then identified and classified using a Softmax classifier. Finally, accurate diagnostic conclusions are obtained by combining the results. The application results of the EDCAE in gearboxes, rolling bearings, and other fields demonstrate the method’s significant advantages.
Bearing condition monitoring and fault diagnosis are crucial for enhancing the safety and reliability of wheels and tracks. Shao et al. [93] proposed a novel Tracking Deep Wavelet Auto-Encoder (TDWAE) method. First, an activation function is employed to design the wavelet auto-encoder (WAE) for enhanced feature quality. Second, a deep wavelet auto-encoder (DWAE) is constructed for advanced feature learning and fault diagnosis. Finally, an adaptive tracking learning algorithm is developed to further improve diagnostic efficiency and performance. When applied to the vibration acceleration signal analysis of locomotive bearings, this method demonstrates superior diagnostic effectiveness compared to traditional diagnostic approaches and standard deep auto-encoders.
In the diagnosis of failures in various rotating machinery, the classification, direction, and severity of rolling bearing failures remain one of the most significant challenges in this field. To address this issue, Shao et al. [94] proposed an Ensemble Deep Auto-encoder (EDAE) method. First, an auto-encoder (AE) is generated using activation functions. Second, the EDAE is constructed for unsupervised feature learning from vibration signals. Finally, a combination strategy is employed to integrate diagnostic data, ensuring both accuracy and stability. Diagnostic analysis of bearing vibration signals validated that this method not only eliminates reliance on manual feature extraction for rolling bearing fault diagnosis but also overcomes limitations inherent in deep learning models.
To address the challenge of abundant non-fault state monitoring data versus scarce fault state data and the difficulty of diagnosing multiple mixed faults, Yang et al. [95] proposed a diagnostic method based on feature reconstruction and sparse auto-encoder (SAE) models. They designed a feature reconstruction algorithm to solve long-sequence feature and weak data feature extraction problems and introduced an improved SAE model to adapt to small-sample data training. Experiments demonstrate that this method achieves high diagnostic accuracies of ≥99.4% and ≥99.7% for multiple mixed faults under data imbalance conditions, applicable to gearboxes and rolling bearings, respectively, showcasing its efficient diagnostic capability and superiority with small training samples.
Addressing the challenges of feature extraction and low diagnostic accuracy in rolling bearing vibration signals under strong noise interference, Ji et al. [96] proposed a joint deep learning model (MDCAE-CACNN) integrating a multi-scale dilated convolutional auto-encoder (MDCAE) and a convolutional neural network with channel attention (CACNN). The MDCAE utilizes convolutional kernels with varying receptive field sizes to capture multi-timescale features and denoise bearing vibration signals, while the CACNN effectively extracts fault features and accurately diagnoses fault types through its channel attention mechanism. The results demonstrate that this model achieves significant improvements in diagnostic accuracy under various noise conditions, exhibiting high precision, strong robustness, and generalization capabilities.
To address the challenge of extracting useful features from bearing signals for fault classification, Li et al. [97] proposed an intelligent fault diagnosis method based on stacked denoising auto-encoders (SDAEs) and adaptive deep hybrid kernel extreme learning machines (ADHKELMs). The SDAE is employed for deep feature extraction, while a novel ADHKELM model is constructed by integrating hybrid kernel extreme learning machines combining polynomial and wavelet kernel functions. Experiments validated that this method outperforms other related approaches in fault classification accuracy, robustness, and generalization capability, with its superiority demonstrated through two sets of experimental data.
To address the challenges of poor stability in gearbox vibration signals, difficulty in extracting fault features, and low diagnostic accuracy in complex operational environments, Wu et al. [98] proposed a gearbox fault diagnosis method based on an improved stacked denoising auto-encoder (SDAE) and kernel extreme learning machine (KELM). The SDAE network structure was optimized using an adaptive weight particle swarm optimization (SAPSO) algorithm to extract deep feature information from the raw signal. The extracted fault features were then input into KELM for fault classification. The results demonstrated that this method achieved a classification accuracy of 97.2% under low-signal-to-noise-ratio conditions, exhibiting high effectiveness and robustness.
Addressing the limitations of network structure and hyperparameter optimization in traditional deep learning and transfer learning-based rolling element bearing fault diagnosis methods, Chang et al. [99] proposed a Multi-Objective Deep Auto-encoder (MODAE) approach. The Multi-Objective Particle Swarm Optimization (MOPSO) algorithm determines the optimal network structure and hyperparameters, employing a data-driven method to automatically search for network architectures with enhanced generalization and feature extraction capabilities. The results demonstrate high diagnostic accuracy and superior generalization capabilities in multi-fault classification and cross-condition fault diagnosis scenarios.
To address the scarcity of labeled samples in large fault datasets and the severe limitations of existing semi-supervised diagnostic methods under extremely limited labeled samples, Deng et al. [100] proposed a semi-supervised integrated fault diagnosis framework (ADAE-LFDM) based on adversarial decoupled auto-encoders (ADAE) and low-dimensional feature distance metrics (LFDM). The experimental results demonstrate that this method achieves over 97% diagnostic accuracy even with only one labeled sample per fault type and maintains an average diagnostic accuracy of 85% across operating conditions, outperforming other approaches.
Addressing the poor performance of fault diagnosis methods under limited labeled samples, Miao et al. [101] proposed a semi-supervised fault diagnosis method based on a Dual-Stream Attention Cyclic Auto-encoder (DA-CAE). This approach designed a CAE to capture and utilize high-dimensional feature information through a recurrent structure while introducing a DA module to effectively extract key features from a global perspective. The experimental results demonstrated that DA-CAE significantly improved the performance of auto-encoders across different labeling rates, outperforming comparative methods in low-labeling-rate scenarios. Particularly under extremely low labeling rates, it exhibited higher accuracy and stability.
Addressing the limitation of traditional auto-encoder (AE)-based fault identification methods requiring training data from faulty machines, Pawlik et al. [102] proposed an auto-encoder-based fault identification technique (AE-FIT). This method trains solely on data from undamaged machines. By preprocessing vibration signals, rotational speed, and operating conditions to derive load-dependent amplitude relationships, it feeds these inputs into an AE-based neural network for training. The results demonstrate that this method effectively detects and identifies gearbox faults—including those under varying loads and temperatures—without requiring faulty machine data.
Addressing the challenge of establishing separate models for different components due to thermal conduction effects and the resulting difficulty in fault localization, Chen et al. [103] proposed an adaptive noise reduction-based multi-component condition monitoring method. This approach combines data-adaptive noise reduction with an improved variational auto-encoder (LSTM-VAE) to construct a normal behavior model (NBM) for the gearbox. It enables simultaneous monitoring of multiple gearbox components’ operational states while accounting for inter-component correlations. The results demonstrate that this method effectively balances modeling accuracy and efficiency for multi-component NBMs, achieving early warning of gearbox anomalies and precise fault localization.
To address the challenges of representing complex relationships between measurement signals and bearing health using Support Vector Machines (SVMs) and the difficulty of feature selection in high-dimensional data, Dunbosen et al. [104] proposed a method combining Sparse Auto-encoders (SAEs) and SVM: features are extracted from vibration signals to form high-dimensional feature vectors, which are then learned using a deep sparse auto-encoder. Selected deep features are subsequently fed into the SVM for training. This approach achieves superior accuracy and stability compared to traditional SVM methods.
Addressing the high noise and dimensionality challenges in rolling bearing failure data from large machinery, Li et al. [105] proposed a fault diagnosis method based on an improved stacked auto-encoder. Based on an improved Dropout method, a classification deep auto-encoder network model was constructed. A layer-wise greedy algorithm was employed to adaptively extract effective features from high-dimensional data, while sparse constraints and “damage noise” were incorporated into the original auto-encoder to enhance the robustness of feature representation. Compared with the BPNN and SVM, this method demonstrates superior stability and higher accuracy for rolling bearing fault diagnosis.
5.3.2. Diagnostic Potential of Auto-Encoder in Port Equipment
Based on a systematic analysis of literature on auto-encoder applications in fault diagnosis, the AE model demonstrates unique and significant application value in the field of intelligent operation and maintenance for port equipment. Auto-encoders possess unparalleled advantages in port equipment diagnostic scenarios characterized by sparse data, owing to their exceptional unsupervised feature learning capabilities. Large port equipment such as gantry cranes and yard cranes exhibit high reliability and low failure rates, resulting in extremely limited fault samples. Auto-encoders can autonomously learn effective feature representations from vast amounts of unlabeled data, enabling precise detection of early anomalies by constructing a baseline model of normal operating conditions. Improved architectures like variational auto-encoders and deep shrinkage auto-encoders further enhance diagnostic performance under data imbalance by incorporating adaptive focus loss and multi-scale feature extraction mechanisms. This provides an effective technical pathway to resolve the “high reliability paradox” in port equipment.
Auto-encoders demonstrate robust interference resistance and resilience when addressing complex port environmental challenges. To address intense noise interference in port settings, structures like stacked denoising auto-encoders and multi-scale dilated convolutional auto-encoders effectively filter environmental noise to extract robust fault features. Integrated deep contraction auto-encoders learn noise-invariant feature representations through the collaborative operation of multiple DCAEs, maintaining stable diagnostic performance even in high-noise environments. Simultaneously, wavelet-based auto-encoder enhancements combined with adaptive tracking learning algorithms better capture fault features in non-stationary signals, adapting to complex operating conditions with drastic load variations in port equipment.
AEs also excel in system-level condition monitoring and early warning. By constructing normal behavior models, AEs enable anomaly detection without requiring fault samples—a feature particularly suited for health monitoring of critical port equipment. Fault recognition techniques based on auto-encoders can be trained solely using data from undamaged machinery, effectively detecting faults in components like gearboxes under varying load and temperature conditions. Multi-component condition monitoring methods, combined with improved variational auto-encoders, can simultaneously monitor the operational status of multiple components while accounting for their correlations, providing reliable technical support for system-level health management of complex port equipment.
The deep integration of advanced techniques like semi-supervised learning and transfer learning with an AE further broadens its application prospects in port equipment diagnostics. The semi-supervised framework combining adversarial decoupled auto-encoders with low-dimensional feature distance metrics maintains high diagnostic accuracy even under extremely limited labeled samples. Deep transfer multi-wavelet auto-encoders enable cross-device knowledge sharing through parameter migration, offering novel approaches for collaborative diagnostics of multiple identical port equipment units. These technological advancements will significantly accelerate the practical application of AEs in intelligent port equipment maintenance, laying a solid foundation for constructing smarter, more efficient equipment health management systems.
5.4. Diagnostic Methods and Application Potential of RNNs
5.4.1. Fault Diagnosis Method Based on RNN
Benefiting from the recurrent architecture of RNN models, this approach excels at processing time-series data, enabling effective handling of time-history data. RNN models are not only applicable in fault diagnosis but also show great potential in lifespan prediction.
Guo et al. [106] proposed an RNN-based health indicator prediction method. Existing bearing health indicators suffer from the following shortcomings: on one hand, due to the varying ranges of statistical features, many features do not contribute equally to indicator construction; on the other hand, it is challenging to determine failure thresholds, as these thresholds typically differ across machines. The proposed health indicator prediction method overcomes these limitations, with its reliability validated through experimental results.
Addressing the challenge of CNN models processing time-series data, Zhang et al. [20] proposed an RNN-based method for rotating machinery fault classification. First, it converts one-dimensional time-series vibration signals into two-dimensional image signals. Second, it employs Gated Recurrent Units (GRUs) to extract features from both time-series data and two-dimensional images. Finally, a Multi-Layer Perceptron (MLP) is used for fault classification. The experimental results demonstrate that this approach achieves superior performance compared to traditional deep learning methods.
Addressing the structural and transmission complexities of rotating machinery, Yang et al. [107] proposed an intelligent fault diagnosis method based on Long-Short-Term Memory Recurrent Neural Networks (LSTM-RNN). This approach utilizes data signals collected from multiple sensors within the system, leveraging the spatial and temporal dependencies embedded in the data to detect faults and classify corresponding fault types. The feasibility of this method was demonstrated through validation on a simulator.
To address the challenges of feature extraction and low classification accuracy in variable-speed rolling bearings, Ma et al. [108] proposed a method based on bandwidth-divided variational modal decomposition (BDVMD), fractional-domain time-shifted multiscale fractional Boltzmann-Shannon mutual entropy (FRTSMFrBSIE), and parameter-optimized gated recurrent units with multi-head self-attention (IDBO-GRU-MHSA). The experimental results demonstrate that this approach effectively enhances feature extraction quality and fault classification accuracy, ultimately achieving a classification accuracy of 98.75%.
Addressing accuracy and robustness issues in fault diagnosis for rolling bearings under diverse load conditions, Sun et al. [109] proposed a hybrid fault diagnosis method (GGRU-1DCNN-AdaBN) based on an improved gated recurrent unit (GGRU) network, one-dimensional convolutional neural network (1DCNN), and adaptive batch normalization (AdaBN). The results demonstrate outstanding fault diagnosis accuracy and robustness under both constant and variable load conditions, coupled with strong generalization capabilities and versatility.
To address the challenge of accurately diagnosing compound faults in rolling bearings under strong noise conditions, Yin et al. [110] proposed a compound fault diagnosis method for bearings based on an improved dual-channel model combining a Deep Residual Shrinkage Network (DRSN) and Gated Recurrent Unit (GRU). The results demonstrate that this method significantly improves fault diagnosis accuracy under strong noise conditions, achieving an accuracy rate of 91.2%. It effectively decouples and identifies composite faults, exhibiting superior noise resistance and diagnostic capabilities.
Addressing the limitations of accuracy and timeliness in conventional wind turbine gearbox fault prediction methods, Wang et al. [111] proposed a fault prediction approach based on an improved ant lion optimization algorithm (IALO) and a gated recurrent unit (GRU) model. The results indicate that this method outperforms conventional approaches in both prediction accuracy and timeliness, effectively enhancing fault early warning performance for wind turbine gearboxes. It reduces the risk of severe accidents caused by delayed alerts, ensuring the safe and stable operation of wind turbines.
To address the limitations of traditional fault diagnosis methods in handling complex nonlinear signals, Luo et al. [112] proposed an intelligent fault diagnosis model based on an improved Gorilla Troop Optimization (IGTO) algorithm-optimized VMD and LSTM network. The results demonstrated superior accuracy and stability on both the CWRU and Jiangnan University datasets, proving the model’s superior performance in processing complex signals.
To enhance the accuracy and adaptability of defect detection in rotating machinery under varying load conditions, Ahsan et al. [113] proposed a hybrid model integrating Continuous Wavelet Transform (CWT), LeNet-5, and LSTM. This model achieves high accuracy across different load conditions, enabling precise fault detection and diagnosis, and provides a powerful tool for predictive maintenance in industrial environments.
Addressing the challenges of feature extraction and fault diagnosis for gearbox vibration signals, Zhang et al. [114] proposed a gearbox fault diagnosis method based on VMD and optimized LSTM. This approach utilizes VMD to extract gear vibration signal features, quantifies features using permutation entropy (PE), and employs the Chameleon Search Algorithm (CSA) to optimize LSTM parameters. The results demonstrate that this method accurately and rapidly identifies gearbox faults under varying lubrication pressures, achieving an accuracy exceeding 97.8% and reaching 100% under normal lubrication conditions, highlighting its superior performance in gearbox fault diagnosis.
To address the low accuracy of common rolling bearing fault diagnosis, Meng et al. [115] developed a rolling bearing fault diagnosis method based on hyperparameter optimization algorithms and LSTM. The results indicate that after optimization, the accuracy of this method improved to 95.91%, 98.93%, and 99.89%, respectively. Compared to the other three diagnostic models, the model combining the hyperparameter optimization algorithm with LSTM demonstrated superior fault diagnosis capabilities.
To address the classification of common electric spindle faults and enable early fault detection, Alkhanafseh et al. [116] proposed a novel recurrent neural network (RNN) model integrating long short-term memory (LSTM), gated recurrent units (GRUs), and two fully connected layers. The results indicate that this model achieves accuracies of 99.87%, 99.599%, and 99.48% on training, validation, and testing datasets, respectively, effectively classifying 10 distinct motor fault scenarios.
Inspired by infinitesimal methods, An [117] proposed a novel intelligent fault diagnosis model utilizing RNNs for bearing fault diagnosis. First, the model segments samples and extends them to each time period dimension through an input network. Second, it stores the dataset and transmits it to a long-short term memory network, outputting it to the next phase. Finally, the network’s output data predicts the equipment’s health status. This method was validated on bearings under varying speeds and loads, demonstrating higher accuracy than traditional approaches.
When data acquisition involves significant noise, the results from soft sensors become unreliable. To address this, Lee et al. [118] designed a novel soft sensor employing an RNN model as its fundamental architecture and Bayesian techniques for computation. Compared to traditional soft sensors, this new approach offers distinct advantages: it quantifies the reliability of prediction values, thereby reducing production costs caused by erroneous predictions.
For machinery health monitoring, Zhou Qicai et al. [119] proposed a bearing fault diagnosis model based on an improved stacked RNN. Leveraging the deep network’s strong nonlinear adaptability and the RNN’s temporal propagation characteristics, this model addresses gradient decay issues in stacked RNNs through gated recurrent units, enabling bearing condition classification and identification. It effectively diagnoses bearing faults with reliable performance and generalization capabilities.
Additionally, RNN models can be combined with CNN models to predict engine remaining life. Wang, Kaiye et al. [120] proposed the Convolutional Independently Recurrent Neural Network (CIndRNN) model. This model extracts high-dimensional features from sensor data and reconstructs multivariate time series to predict engine remaining life, achieving higher accuracy than other machine learning methods.
5.4.2. Diagnostic Potential of RNN in Port Equipment
Based on a systematic analysis of literature on the application of recurrent neural networks (RNNs) and their variants in fault diagnosis, RNN models demonstrate unique and significant application value in the field of intelligent operation and maintenance for port equipment. RNNs possess inherent advantages in processing continuous monitoring data from port equipment due to their inherent recurrent feedback structure and temporal memory capabilities. The operational states of large port equipment such as quay cranes and yard cranes exhibit distinct temporal evolution characteristics, with performance degradation processes often manifesting as gradual changes over time series. RNNs and their enhanced variants (e.g., LSTM, GRU) effectively capture long-term dependencies within monitoring parameters like vibration and temperature. By learning from historical states, they enable accurate predictions of equipment health trends. Particularly for predicting the remaining life of critical components like bearings and gearboxes, RNN-based health indicator prediction methods overcome the limitations of traditional statistical features. They establish personalized failure thresholds, providing a scientific basis for predictive maintenance of port equipment.
When addressing complex port operating conditions, RNNs demonstrate exceptional adaptability and robustness. To address the characteristics of port equipment, such as drastic load changes and significant speed fluctuations, an improved gated recurrent unit network combined with adaptive batch normalization maintains stable diagnostic performance under varying operating conditions. Specifically, the optimized GRU model incorporating a multi-head self-attention mechanism effectively handles fault feature extraction for variable-speed rolling bearings, achieving high diagnostic accuracy even under complex operating states. Furthermore, a dual-channel model integrating deep residual contraction networks with GRUs excels in diagnosing composite faults under high-noise conditions. It effectively decouples and identifies multiple fault features, which is crucial for achieving precise diagnostics in the noisy port operating environment.
RNNs also demonstrate strong potential in system-level fault diagnosis and early warning. By constructing a hybrid LSTM-GRU recurrent neural network model, it effectively handles multi-fault mode classification for components like electric spindles, enabling precise early-stage fault detection. RNN soft sensors integrated with Bayesian techniques not only deliver reliable predictions but also quantify prediction uncertainty, providing dual safeguards for port equipment safety. The improved stacked RNN model effectively resolves gradient vanishing issues in deep networks through gated recurrent units, enabling accurate classification and identification of bearing conditions and demonstrating strong engineering applicability.
The deep integration of optimization algorithms with RNNs further enhances their practicality and reliability in port equipment diagnostics. LSTM networks based on improved optimization algorithms significantly boost diagnostic model accuracy and stability through automatic parameter optimization. Novel hybrid architectures like convolutional independent recurrent neural networks combine the CNN’s spatial feature extraction capabilities with the RNN’s temporal modeling strengths, providing more effective technical means for multi-source sensor data analysis and remaining life prediction in port equipment. The advancement of these innovative technologies will substantially accelerate the practical application of RNNs in intelligent port equipment maintenance. This lays a solid foundation for constructing more precise and reliable predictive maintenance systems, ultimately achieving a fundamental shift in port equipment management from “reactive repair” to “proactive early warning.”
5.5. Comparative Analysis and Discussion of Four Deep Learning Models
5.5.1. Multi-Dimensional Performance Comparison Analysis
As discussed in the preceding sections, the four types of deep learning models—DBN, CNN, AE, and RNN—each possess distinct characteristics in the field of fault diagnosis, forming a complementary technical framework. However, due to variations in the datasets, preprocessing methods, and evaluation criteria employed across different studies, a simple comparison of accuracy rates reported in the literature often fails to accurately reflect the true performance of the models. For instance, achieving nearly 100% accuracy for a single fault type under simple operating conditions differs fundamentally in technical significance and practical value from attaining 85% accuracy for complex faults under noisy, variable conditions.
To systematically evaluate the comprehensive performance of these four models, this paper constructs a comparative analysis framework based on five dimensions: core principles, applicable data, computational efficiency, noise resistance, and port application potential. The DBN excels in unsupervised feature learning, making it particularly suited for addressing the scarcity of fault samples in port equipment. The CNN possesses unique advantages in spatial feature extraction, effectively handling two-dimensional data such as time-frequency images. The AE demonstrates outstanding performance in anomaly detection and data reconstruction, offering novel approaches for equipment condition monitoring. The RNN, leveraging its temporal modeling capabilities, shows significant potential in predictive maintenance.
In practical applications, model selection requires comprehensive consideration of multiple factors. The unique operating environment of port equipment imposes stringent demands on diagnostic systems: they must withstand high temperatures, high humidity, and highly corrosive marine conditions while meeting real-time monitoring requirements and processing complex signals under variable operating conditions. As shown in Table 2, different models excel in distinct dimensions. Researchers must strike the optimal balance between model complexity, computational efficiency, and diagnostic accuracy based on specific diagnostic tasks, data characteristics, and performance requirements.
Table 2.
Multidimensional comparative analysis table of four neural network types.
This multidimensional, systematic comparative analysis not only avoids the limitations of single-metric evaluations but also provides comprehensive, objective reference criteria for selecting fault diagnosis models for port equipment. It further advances the scientific application and effective implementation of deep learning technologies in intelligent port operations and maintenance.
5.5.2. Discussion on Model Selection Based on Comparison
Based on the comprehensive comparison in Table 2, we derive the following guiding insights to assist in selecting diagnostic models for port equipment:
When the diagnostic objective involves pattern recognition and classification of known faults, especially when data can be converted into image formats (such as time-frequency plots), CNNs are typically the preferred choice due to their favorable balance between accuracy and computational efficiency. When the focus is on online monitoring of equipment status and early anomaly detection, especially in scenarios with scarce or difficult-to-obtain fault samples, the AE and its variants demonstrate unique advantages. They can unsupervised learn normal operating patterns and issue early warnings for abnormal states deviating from these patterns. When diagnostic tasks are strongly correlated with the sequential operational behavior of equipment—such as predicting remaining useful life or diagnosing faults coupled with specific operational processes—RNN/LSTM models are a natural choice due to their profound ability to capture temporal dynamics. When facing high data annotation costs and the desire to pre-train models from large amounts of unlabeled data, the DBN remains a valuable feature learning tool.
It is crucial to emphasize that the diagnostic environment for port equipment is complex, and a single model often struggles to address all challenges. Future trends lie in developing hybrid models, such as using CNNs to extract spatial features before feeding them into RNNs for temporal analysis (CNN-RNN hybrid architecture), or employing AEs for data denoising followed by CNNs or RNNs for fine-grained classification. Researchers should flexibly select or integrate these models based on the specific diagnostic target, available data resources, and performance requirements.
6. Core Challenges and Breakthrough Pathways for Intelligent Diagnostics of Port Equipment
6.1. Challenges and Countermeasures at the Data Level
As a data-driven technology, deep learning heavily relies on large-scale, high-quality training data for its performance. However, in the field of port equipment diagnostics, constructing such datasets presents unique challenges stemming from the inherent characteristics of the equipment. This chapter will systematically analyze these core data-level challenges and explore the most promising current countermeasures.
6.1.1. Data Characteristics and Core Challenges of Port Equipment
The data environment for port equipment exhibits characteristics distinctly different from those of general rotating machinery. The primary challenges can be summarized as follows:
- (1)
- The extreme scarcity of failure data and the “high reliability paradox”: As high-value, high-reliability assets, core port equipment (such as quay cranes and yard cranes) undergoes exceptionally stringent design, manufacturing, and maintenance standards, resulting in an inherently low failure rate. This creates a fundamental contradiction with the deep learning model’s requirement for a large volume of failure samples, thus forming the “high reliability paradox”: The events we most urgently need intelligent diagnostics to prevent are precisely those that occur extremely rarely but carry catastrophic consequences—and it is precisely for these events that data is the scarcest.
- (2)
- Professional Barriers and High Costs of Data Annotation: The operational states and failure modes of port equipment are complex, requiring deep involvement from domain experts (such as senior maintenance engineers) to accurately annotate data samples. This annotation process, heavily reliant on scarce expert knowledge, is time-consuming, labor-intensive, and costly, making the construction of large-scale annotated datasets extremely challenging both economically and practically.
- (3)
- The inherent extreme imbalance in data categories: throughout a device’s entire lifecycle, it spends the vast majority of time in normal operating conditions, while abnormal and failure states account for an extremely small proportion. This imbalance results in collected datasets where “normal” samples may outnumber ‘fault’ samples by several orders of magnitude. Training models directly on such datasets causes them to learn patterns from the dominant class, leading them to predict nearly all inputs as “normal” to achieve high overall accuracy—while possessing virtually zero actual fault detection capability.
6.1.2. Cutting-Edge Technical Approaches to Addressing Data Challenges
To address these challenges, a single technology is unlikely to suffice; instead, a combination of strategies is required, covering every stage from data generation to algorithm design.
(1) Addressing Data Scarcity: Generation and Migration
Simulation-Based Data Generation and Digital Twins: By establishing high-fidelity physical models or digital twins of critical port components (such as hoisting mechanism gearboxes), various failures (e.g., gear tooth pitting, bearing spalling) can be simulated in a virtual environment, generating corresponding, precisely annotated simulation data. This approach offers a potential solution to the extreme scenario of “zero failure samples.” Furthermore, integrating Generative Adversarial Networks (GANs) [121] or Variational Auto-encoders (VAEs) can enhance the diversity and realism of generated data, making it more closely align with the distribution of real-world data.
Cross-Device and Cross-Condition Transfer Learning: This approach aims to leverage models trained on laboratory test benches or other similar yet data-rich equipment. Through domain adaptation techniques [122], it transfers the learned generic fault features to target port equipment. Its core rationale is that despite differences in equipment size and operating conditions, the fundamental physical mechanisms of faults (such as shock characteristics and modulation phenomena) remain consistent. Models can be fine-tuned and adapted based on this universal knowledge.
(2) Addressing Labeling Challenges: Weak Supervision and Active Learning
Weakly supervised [123] and self-supervised learning: Weakly supervised learning can utilize imperfect yet readily available labels (such as timestamps like “after overhaul” or “failure shutdown” recorded in equipment maintenance logs) to guide model training. Self-supervised learning goes further by designing pretext tasks (e.g., predicting masked signal segments, determining the sequence of temporal fragments). This enables models to autonomously learn useful feature representations from vast amounts of unlabeled data, significantly reducing reliance on manual annotation.
Active Learning [124]: This strategy constructs an iterative loop that enables the model to autonomously “select” unlabeled samples most informative for improving its performance, which are then submitted to experts for annotation. This approach maximizes the utility of expert annotations, thereby achieving optimal model performance at minimal annotation cost.
(3) Addressing Class Imbalance: Algorithms and Resampling
At the algorithmic level, weighted cross-entropy loss functions or Focal Loss can be employed. By increasing the weight of minority class samples in the loss function, the model is compelled to focus more on fault samples that are difficult to classify correctly during training.
At the data level, oversampling and undersampling techniques can be employed. Among these, Synthetic Minority Oversampling Technique (SMOTE) [125] and its derivative algorithms synthesize new, plausible fault samples by interpolating minority class samples within the feature space. This effectively balances the dataset distribution, serving as a classic and effective solution for addressing class imbalance.
Through this multi-dimensional technological approach, we aim to develop robust and reliable deep learning diagnostic models for port equipment under conditions of scarce data, costly annotation, and imbalanced distribution. This will ultimately overcome the constraints of the “high reliability paradox.”
6.2. Environmental Challenges and Countermeasures
In the specific industrial setting of ports, the successful deployment of deep learning fault diagnosis models depends not only on the superiority of their algorithms but also on their adaptability to complex, demanding, and dynamic operational environments. This chapter will delve into the specific threats posed by port-specific challenges to model performance and systematically explore corresponding algorithmic and engineering adaptation strategies.
6.2.1. The Mutual Influence Between Environmental Harshness and Data Quality
Salt spray corrosion caused by the high salinity and humidity of port environments affects far more than just mechanical structures; it profoundly impacts the perception layer of diagnostic systems. It can lead to gradual drift or sudden failure in the measurement accuracy of sensors such as vibration and temperature sensors, causing the data input into the model to deviate from reality from the outset. This sensor-level performance degradation gradually distorts the “healthy” baseline learned by the model, potentially masking early faults or triggering numerous false alarms. Furthermore, extreme weather conditions—such as strong winds, heavy rain, and sudden temperature shifts—act as powerful noise sources that can directly overwhelm faint fault signals. while simultaneously inducing substantial vibration responses in the equipment’s large metal structures—responses unrelated to faults but easily misinterpreted by models as structural damage.
Consequently, corresponding adaptation strategies must be multi-layered and integrated. At the hardware level, industrial-grade sensors with higher protection ratings (e.g., IP68) and corrosion resistance should be deployed, complemented by redundant deployment designs. At the algorithmic level, online data quality assessment modules and self-calibration algorithms must be incorporated to detect and compensate for sensor performance degradation. Concurrently, models insensitive to baseline drift (such as those focused on relative changes like differential features or sequential analysis) should be prioritized. Structures like Deep Auto-encoders (DAEs) should be leveraged to effectively filter out additive noise introduced by the environment.
6.2.2. The Challenge of Dynamic Operation Modes on Model Robustness
The highly unstable loading patterns of port equipment (instantaneous shifts from empty to fully loaded states involving dozens of tons) and frequent start-stop operations result in operational conditions that exhibit pronounced non-stationarity and dynamic variability both temporally and spatially. For a “static” model trained on fixed operational datasets, drastic changes in load and speed cause significant shifts in the feature distribution of vibration signals. Such distribution shifts caused by normal operation can exceed the magnitude of feature changes triggered by early-stage faults. This leads to a high volume of false positives, potentially eroding field personnel’s trust through a “boy who cried wolf” effect.
Enhancing model robustness in this dynamic environment hinges on teaching it to distinguish between “operational variations” and “genuine faults.” One of the most effective technical approaches is Deep Transfer Learning combined with Domain Adaptation. By incorporating a domain discriminator into the model and applying adversarial training, the feature extraction network is compelled to learn deep features that are invariant to operational variations like load and speed yet solely indicative of equipment health status. Additionally, constructing a comprehensive training dataset covering all common load-speed combinations and explicitly incorporating operational parameters as auxiliary inputs during training can effectively guide the model to understand normal behavior patterns under varying operating conditions.
6.2.3. Advanced Requirements for System Complexity and Safety Criticality
As a complex system involving the coordinated operation of multiple pieces of equipment, ports experience vibration transmission and electromagnetic interference generated by device interactions. This results in measurement signals contaminated by excitation from multiple sources, posing significant challenges for precise fault localization. Models are prone to misinterpreting vibrations caused by adjacent equipment as faults in the target device. More critically, port equipment constitutes safety-critical systems where the reliability and interpretability of fault diagnosis outcomes directly impact the safety of personnel, cargo, and assets. The inherent “black-box” nature of deep learning models is unacceptable in this context. A diagnosis that achieves high accuracy but fails to provide decision-making rationale cannot be relied upon to guide critical operational decisions such as production shutdowns for maintenance.
Addressing these challenges requires innovation in both system architecture and model mechanisms. To tackle multi-source interference and fault localization, multi-sensor information fusion techniques must be developed. By deploying sensor networks and modeling equipment system topologies using technologies like Graph Neural Networks (GNNs), vibration propagation paths can be better understood, enabling interference isolation and fault tracing. To meet safety-critical requirements, explainability (XAI) must be central to model design. This includes visualizing the raw signal segments underlying model decisions via attention mechanisms or employing post hoc explanation methods like SHAP and LIME to substantiate diagnostic conclusions [126]. Furthermore, uncertainty quantification is crucial. Models should output uncertainty estimates for current diagnostic results (e.g., via Monte Carlo Dropout [127]), proactively triggering human review when confidence is low. This builds a collaborative diagnostic ecosystem based on mutual trust between humans and machines.
Through these targeted adaptation strategies, deep learning models can transition from an idealized “greenhouse” to real-world “stormy conditions,” ultimately becoming trusted guardians of port equipment health.
6.3. System Deployment Engineering Path
This section aims to transcend the algorithmic level and explore, from a systems engineering perspective, the critical factors that must be considered for the successful deployment of deep learning fault diagnosis models in real port environments. These include hardware architecture, real-time requirements, integration with existing industrial systems, and standardized deployment processes, providing a clear roadmap for advancing theoretical research toward industrial implementation.
6.3.1. System Architecture and Recommendations of Hardware Configuration
Deploying validated deep learning diagnostic models from laboratory environments to real-world port operations constitutes a systematic engineering endeavor involving hardware, software, and workflow integration. To ensure successful implementation and tangible value generation, comprehensive system-level planning is essential. An ideal deployment architecture is a collaborative intelligent diagnostic system spanning cloud, edge, and endpoint layers.
Within this framework, the “end-side” comprises high-protection-grade sensors and data acquisition units deployed at critical locations on equipment like gantry cranes and yard cranes. These components are responsible for real-time sensing of multimodal data including vibration, sound, and imagery. The “edge” layer is supported by edge computing gateways distributed across the terminal site. These gateways require medium-performance GPUs or dedicated AI accelerator cards. Their core mission is to run lightweight diagnostic models (e.g., pruned and quantized) to achieve millisecond-to-second local real-time inference and early fault warnings, thereby overcoming network latency and ensuring the immediacy of critical operations. The “cloud” relies on high-performance computing clusters within the port data center. It aggregates comprehensive data, performs complex model retraining, conducts macro-level health assessments, and predicts the remaining lifespan of critical components.
6.3.2. Real-Time Processing Challenges and Performance Optimization
This architecture poses significant challenges to real-time processing capabilities. To meet the demand for rapid fault response in port equipment, the end-to-end latency of the entire system—from data acquisition to result output—must be strictly limited to within seconds. Achieving this goal relies not only on the aforementioned edge computing paradigm but also requires deep optimization of diagnostic models. This includes adopting adaptive sampling strategies to balance resource consumption between normal and abnormal states, or designing parallel processing pipelines to maximize computational efficiency.
6.3.3. Integration with Port Management Systems
The value of an isolated intelligent diagnostic system is limited. It must achieve deep integration with the port’s existing operational management framework—the Supervisory Control and Data Acquisition (SCADA) system and the Enterprise Resource Planning (ERP) [128] system—to form a closed-loop decision-making process. Through integration with the SCADA system, diagnostic results appear in real time on the central control display. This enables dispatchers to analyze equipment health status alongside real-time operational parameters (such as current and load), achieving transparent monitoring. Furthermore, integration with the ERP system enables predictive maintenance alerts from the diagnostic system to automatically trigger maintenance work orders and drive spare parts procurement processes. This seamlessly translates technical diagnostic conclusions into precise operational management actions, ultimately automating the journey from “condition awareness” to “maintenance execution.” This significantly enhances the overall efficiency and economic benefits of port operations.
6.3.4. Standardized Deployment Workflow
A clear and actionable standardized deployment workflow is essential for project success. This process should begin with a well-defined diagnostic requirement specification, progress through data infrastructure deployment, historical data collection and model development, system integration and joint debugging, trial operation and model iteration, ultimately culminating in a standardized solution for full-scale deployment. Through this systematic engineering approach, deep learning fault diagnosis technology can bridge the gap from “laboratory prototype” to “industrial-grade application,” truly taking root in complex and demanding port environments to become a reliable cornerstone supporting their intelligent transformation and upgrading.
6.4. Future Pathways for Technological Development
Despite the remarkable achievements of deep learning in diagnosing standard rotating components such as bearings and gearboxes, it faces a fundamental leap when transitioning from controlled laboratory environments to the complex realities of port industrial settings. Port equipment, including quay cranes, yard cranes, and ship unloaders, constitutes complex systems operating continuously under extreme conditions. This section aims to systematically analyze the core bottlenecks in this technology transfer process and establish a future-oriented research framework with feasible pathways.
6.4.1. The Unique Characteristics and Core Challenges of Port Equipment
The unique attributes of port equipment pose a formidable system-level challenge to data-driven deep learning models.
- (1)
- The primary challenge stems from its extremely complex and dynamic operating conditions. Unlike the constant rotational speeds and loads found in laboratory settings, a single operational cycle of a ship-to-shore crane involves drastic load fluctuations, frequent starts and stops, and high-speed impacts. This results in vibration signals exhibiting pronounced non-stationarity and non-Gaussian characteristics. This dynamic nature renders diagnostic models trained under single stable conditions highly prone to misinterpretation, often mistaking normal operations for faults. Consequently, false alarm rates remain persistently high, severely undermining the model’s field credibility.
- (2)
- Secondly, the harsh operating environment and deep background interference pose significant challenges for feature extraction. The high-salt, high-humidity conditions at port sites not only accelerate mechanical corrosion but also directly impact sensor measurement accuracy and lifespan. More critically, intense environmental noise (such as sea winds, wave surges, and operational sounds from adjacent equipment) combined with electromagnetic interference can completely drown out or distort the key feature signals that characterize early, subtle faults. This demands that deep learning models possess robustness and noise resistance beyond laboratory standards, enabling them to perform robust feature learning that “separates the wheat from the chaff.”
- (3)
- A deeper challenge lies in the port equipment’s nature as a complex, multi-subsystem, tightly coupled system. A localized failure (e.g., bearing wear in a hoisting mechanism) can trigger chain reactions, manifesting as multimodal symptoms like structural vibration anomalies, hydraulic pressure fluctuations, or altered motor current characteristics. This multi-source coupling and propagation effect of failures renders “isolated” diagnostic models—designed for single components or single failure modes—ineffective. This necessitates a diagnostic framework with a system-level perspective [129] capable of understanding and analyzing dynamic interdependencies between subsystems, enabling precise fault tracing and isolation.
- (4)
- Ultimately, all these technical challenges converge under the essential constraints of reliability and cost-effectiveness for engineering implementation. Port equipment downtime carries extremely high costs and critical safety implications, which dramatically magnifies the drawbacks of deep learning models’ “black box” nature. The lack of interpretability in the decision-making process makes it difficult for field engineers and managers to understand and trust the model’s diagnostic results, thereby hindering their use in guiding actual maintenance decisions. Therefore, enhancing the model’s interpretability and reliability—ensuring its outputs are not only accurate but also “trustworthy”—is key to achieving technological implementation.
6.4.2. Future Research Directions and Pathways for Convergence Development
To build next-generation intelligent diagnostic systems for port equipment, future research should focus on advancing the deep integration of deep learning with specific industrial scenarios, forming a complete technological closed loop from perception to decision-making.
- (1)
- Cross-Domain Adaptive and Robust Model Learning: The core objective is to enable models to “learn to ignore operating conditions and focus on faults.” Future efforts should prioritize the development of deep transfer learning and domain adaptation algorithms. By leveraging richly annotated laboratory data (source domain) and employing techniques such as feature distribution alignment and adversarial training, models can overcome distribution discrepancies caused by drastic variations in port field conditions (target domain). This approach achieves robust diagnostics across operating conditions, fundamentally resolving the challenge of model generalization.
- (2)
- Multi-source Information Fusion and Digital Twin-Driven Diagnostics: It is imperative to overcome reliance on single vibration signals and establish a multi-source heterogeneous information fusion diagnostic framework based on digital twins. By integrating multi-modal data including vibration, acoustics, current, stress, video, and even maintenance logs, the real-time status of physical equipment is faithfully mapped in the virtual space. Within this framework, deep learning models perform multi-evidence collaborative reasoning to comprehensively evaluate and precisely locate complex coupled faults, elevating diagnostics from the “component level” to the “system level.”
- (3)
- Lightweight Design and Edge Intelligence Deployment: To address on-site computing bottlenecks, lightweight model design tailored for edge computing must be pursued. Research encompasses model pruning, quantization, knowledge distillation, and efficient neural network architectures (such as separable convolutions) to significantly reduce model size and computational overhead while preserving performance. Building upon this foundation, a cloud-edge collaborative intelligent operations framework is established: the edge handles real-time, lightweight anomaly detection and early warning, while the cloud manages model updates, big data analytics, and remaining lifespan prediction, enabling optimized allocation of computational resources.
- (4)
- Explainable AI and Physical Mechanism Embedding: Overcoming the “Black Box” Dilemma is Key to Gaining On-Site Trust. On one hand, actively introduce explainable AI (XAI) technologies, such as visualizing key signal segments underlying model decisions through attention mechanisms, or employing post hoc explanation methods like SHAP and LIME to provide logical justification for diagnostic conclusions. On the other hand, a more fundamental approach lies in exploring Physical Information Neural Networks (PINNs) [130]. By embedding physical prior knowledge—such as equipment dynamic equations and characteristic fault frequencies—as constraints during model training, the outputs become both data-driven and physically compliant. This gives rise to a next-generation diagnostic model that truly “understands both the what and the why.”
Successfully applying deep learning to port equipment diagnostics represents a profound transformation from “algorithmic innovation” to “system implementation.” It demands that researchers step out of the laboratory to confront the complexity, uncertainty, and stringent constraints of industrial environments. By driving the convergence of data-driven approaches with physical mechanisms, integrating intelligent models with systems engineering, and aligning academic innovation with industrial practice, we can overcome current limitations. This will ultimately lead to the development of a truly intelligent, reliable, and trustworthy port equipment health management system, providing the core driving force for intelligent port operations and maintenance.
7. Discussion
Compared to previous reviews in this field, the original contributions of this paper are primarily reflected in the following four aspects, achieving a deepening and leap from “general method overviews” to “domain-specific guidelines”:
(1) Proposing a systematic review framework tailored for port applications, establishing a complete knowledge chain from methodology to engineering implementation.
Most existing reviews follow a conventional narrative structure of “model introduction-general application cases-future outlook,” focusing primarily on the performance of deep learning models on standard components (e.g., bearings, gears). This paper breaks this paradigm by constructing a progressive framework: “methodological foundation-general application validation-domain challenge analysis-system deployment path.” This framework not only addresses “What deep learning models are available for diagnostics” and “How well they perform in lab settings,” but also systematically tackles the core engineering question: “How to deploy these models in complex, demanding port environments.” It is dedicated to solving the “last mile” challenge of transferring technology from the laboratory to industrial sites.
(2) It provides multidimensional, insightful model comparison analysis, offering deep decision-making support for model selection in port scenarios.
Most reviews limit model comparisons to single or few dimensions like accuracy or computational cost. This paper innovatively constructs a multidimensional qualitative-quantitative comparison framework (see Table 2) encompassing core principles, suitable data types, computational efficiency, robustness to noise, and port application potential. This analysis transcends simple performance metric listings, revealing the intrinsic strengths of each model and their alignment with external port environment demands. For instance, it explicitly highlights AE’s potential for anomaly detection under scarce fault samples, RNN’s advantages in temporal modeling for predictive maintenance, and CNN’s applicability in visual diagnostics through time-frequency analysis. This provides researchers and engineers with profound and actionable decision support for model selection across diverse port diagnostic scenarios—such as condition monitoring, early warning systems, and lifespan prediction.
(3) Achieved deep integration of deep learning with port diagnostic scenarios, systematically analyzing domain-specific challenges and mapping adaptive technical pathways.
This paper systematically identifies and thoroughly analyzes the fundamental impacts of port-specific factors—such as salt spray corrosion, unstable loads, and interference from multi-device collaborative operations—on deep learning model performance. This approach moves beyond merely “applying” generic methods to port scenarios, instead treating the “uniqueness” of port environments as the core variable driving technological innovation. Based on this, the paper outlines and recommends targeted solutions including cross-domain adaptation, digital twin-driven data generation, multi-source information fusion, and explainable AI embedded with physical mechanisms. This contribution advances the review’s depth from “diagnosis feasibility” to “achieving robust, reliable diagnostics within this complex environment,” significantly enhancing its practical guidance value.
(4) Outlines a clear system-level engineering implementation pathway, bridging the gap between algorithm prototyping and industrial system integration.
Most reviews stop at algorithmic discussions with minimal focus on engineering deployment. This paper dedicates a section to detailing key practical issues, including “cloud-edge-device” collaborative computing architectures, hardware selection considerations, integration interfaces with existing port management systems like SCADA/ERP, and standardized deployment workflows. This provides port operators and technology implementers with a clear roadmap, demonstrating how to encapsulate advanced diagnostic algorithms into a stable, usable industrial system that seamlessly integrates with existing business processes. It offers an indispensable blueprint for the practical transformation and value realization of research outcomes.
In summary, the value of this paper lies in its distinct domain orientation and engineering systematicity. It serves not only as a comprehensive catalog of deep learning-based fault diagnosis methods but also as a practical technology guide for intelligent operation and maintenance of port equipment. Its aim is to propel deep learning technology from an advanced laboratory tool into a core productivity enabler that tangibly safeguards port security and enhances operational efficiency.
In addition, based on the systematic review of this study, we also clearly observed that fault “detection”, as the front end and foundation of fault “diagnosis”, will be the next key breakthrough to promote the field towards the “active early warning” operation and maintenance paradigm. Future overview work can focus on the following emerging directions:
- Ultra early weak fault detection technology. How to achieve high reliability and low false alarm detection when the characteristic signal is completely submerged by strong background noise in the embryonic stage of fault is the difficulty and frontier of current research.
- Unsupervised and self-supervised fault detection paradigms. In view of the fact that the normal state data of the industrial site is far more than the fault data, how to use a large number of normal samples or unlabeled data to train the model, establish the health baseline, and effectively detect any “unknown” anomalies that deviate from the baseline is the key to solve the problem of data dependence.
- Fault detection based on causal reasoning. The introduction of causal discovery and causal inference model into fault detection helps to understand the internal causal relationship between system variables, so as to distinguish “correlation” and “causality”, improve the interpretability and robustness of detection results, and avoid false positives caused by mixed factors (such as operating condition fluctuations).
An in-depth review of these directions will further promote the paradigm shift in intelligent operation and maintenance from “accurate diagnosis” to “active early warning”, which is also another important enlightenment for subsequent research provided by this paper.
8. Conclusions
This paper provides a systematic review of deep learning-based self-diagnostic methods for port equipment. It first establishes a solid theoretical foundation by detailing the architectures and principles of four representative models: deep belief networks, convolutional neural networks, auto-encoders, and recurrent neural networks.
This paper systematically summarizes the self-diagnosis methods of port equipment based on deep learning. Firstly, a solid theoretical foundation is built, and the architecture and principles of four representative models, DBNs, CNNs, AEs and RNNs, are described in detail. These models are powerful general function approximators in essence, and their core ability to autonomously learn nonlinear mapping relationships from complex data has been verified not only in other fields (such as industrial defect detection, business intelligence prediction, etc.) but also in the underlying logic of their successful application in port equipment fault diagnosis. On this basis, this paper comprehensively reviews the successful application and practical cases of these models in the fault diagnosis of general rotating machinery components and verifies their technical feasibility.
However, the core contribution of this paper lies beyond a mere review of model applications. It delves deeply into the unique challenges encountered when migrating these methods from controlled laboratory environments to the complex and demanding industrial setting of ports. The paper systematically analyzes core bottlenecks arising from the “high reliability paradox” of port equipment—including data scarcity, robustness requirements under dynamic harsh conditions, and explainability demands amid multi-system coupling and stringent safety requirements. It explores a series of cutting-edge countermeasures such as cross-domain adaptation, digital twins, and multi-source information fusion. Furthermore, from an engineering implementation perspective, this paper outlines a “cloud-edge-end” collaborative deployment architecture tailored for port applications and an integration pathway with existing management systems, bridging theoretical research to industrial practice.
Although this paper focuses on the specific application scenario of port equipment, the review framework built by this research from “methodological basis” to “domain challenge analysis” and then to “system deployment path”, as well as the technical strategies to deal with the core challenges such as data scarcity, environmental interference, system coupling, etc., have universal reference significance. For example, in the field of wind power generation, wind turbines also face the problems of variable operating conditions, strong noise and scarcity of fault samples. In the field of rail transit, the health monitoring of train running gear also has high requirements for the lightweight deployment and time series modeling ability of the model. In high-precision manufacturing fields such as CNC machine tools, tool wear prediction and early fault detection also need to integrate multi-source information and physical mechanisms. The cutting-edge paths discussed in this paper, such as cross-domain adaptation, digital twin drive, and multi-source information fusion, provide portable solutions and clear technical development guidelines for the intelligent operation and maintenance of this complex industrial equipment.
To sum up, this review shows that the value of deep learning is rooted in its strong general approximation ability. The systematic work of this paper involves deeply exploring how to transform this general intelligence from a wide range of machine learning fields into a special diagnostic solution that can accurately respond to the unique industrial challenges of the port (such as data scarcity, environmental interference, system coupling, etc.) through a specific model architecture (such as DBN, CNN, AE, RNN) and a systematic engineering path, thus providing a key theoretical basis and practical guide for the construction of a truly intelligent, reliable and reliable port equipment health management system.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Conflicts of Interest
Author Haifeng Wang was employed by the company Shanghai Zhenhua Heavy Industries Co., Ltd. The remaining authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| DBN | Deep Belief Network |
| CNN | Convolutional Neural Network |
| AE | Auto-encoder |
| RNN | Recurrent Neural Network |
| LSTM | Long Short-Term Memory |
| GRU | Gated Recurrent Unit |
| RBM | Restricted Boltzmann Machine |
| BP | Back Propagation |
| STFT | Short-Time Fourier Transform |
| WT | Wavelet Transform |
| EMD | Empirical Mode Decomposition |
| IMF | Intrinsic Mode Function |
| VMD | Variational Mode Decomposition |
| HHT | Hilbert-Huang Transform |
| CWT | Continuous Wavelet Transform |
| PCA | Principal Component Analysis |
| LDA | Linear Discriminant Analysis |
| t-SNE | t-distributed Stochastic Neighbor Embedding |
| LASSO | Least Absolute Shrinkage and Selection Operator |
| MFCC | Mel-Frequency Cepstral Coefficients |
| GAN | Generative Adversarial Network |
| VAE | Variational Auto-encoder |
| SMOTE | Synthetic Minority Over-sampling Technique |
| XAI | Explainable Artificial Intelligence |
| SHAP | SHapley Additive exPlanations |
| LIME | Local Interpretable Model-agnostic Explanations |
| PINN | Physics-Informed Neural Network |
| SCADA | Supervisory Control and Data Acquisition |
| ERP | Enterprise Resource Planning |
| GPU | Graphics Processing Unit |
| GPGPU | General-Purpose computing on Graphics Processing Units |
| SNR | Signal-to-Noise Ratio |
| RUL | Remaining Useful Life |
| CNN-RNN | Convolutional Recurrent Neural Network |
| CNN-LSTM | Convolutional Long Short-Term Memory |
| CNN-BiLSTM | Convolutional Bidirectional Long Short-Term Memory |
| CNN-BiLSTM-MHSA | Convolutional Neural Network-Bidirectional Long Short-Term Memory-Multi-Head Self-Attention |
| CNN-TCN | Convolutional Neural Network-Temporal Convolutional Network |
| DRSN-GRU | Deep Residual Shrinkage Network-Gated Recurrent Unit |
| OTCNN | Online Transfer Convolutional Neural Network |
| MFCNN | Multi-Fusion Convolutional Neural Network |
| ECMCTP | Efficient Cross space Multiscale CNN Transformer Parallelism |
| WGS-CNN | Wavelet Gaussian Window-based Convolutional Neural Network |
| WI-CNN | Wave Intercorrelation-Convolutional Neural Network |
| HADS-CNN-BiLSTM | Hybrid Attention mechanism Depthwise Separable Convolutional Neural Network-Bidirectional Long Short-Term Memory |
| WDCNN | Wide first-layer kernel Deep Convolutional Neural Network |
| NCVAE-AFL | Normalized Conditional Variational Auto-Encoder with Adaptive Focal Loss |
| BTMWAE | Deep Transfer Multi-Wavelet Auto-Encoder |
| EDCAE | Ensemble Deep Contractive Auto-Encoder |
| TDWAE | Tracking Deep Wavelet Auto-Encoder |
| EDAE | Ensemble Deep Auto-Encoder |
| MDCAE-CACNN | Multi-scale Dilated Convolutional Auto-encoder-Channel Attention Convolutional Neural Network |
| SDAE-ADHKELM | Stacked Denoising Auto-encoder-Adaptive Deep Hybrid Kernel Extreme Learning Machine |
| MODAE | Multi-Objective optimized Deep Auto-Encoder |
| ADAE-LFDM | Adversarial Decoupled Auto-encoder-Low-dimensional Feature Distance Metric |
| DA-CAE | Dual-stream Attention Cyclic Auto-Encoder |
| AE-FIT | Auto-Encoder-based Fault Identification Technique |
| LSTM-VAE | Long Short-Term Memory Variational Auto-encoder |
| Bi-DBN | Bi-directional Deep Belief Network |
| KBRDBN | Knowledge-Based Reverse Deep Belief Network |
| IHHO-DBN-ELM | Improved Harris Hawks Optimization-Deep Belief Network-Extreme Learning Machine |
| CDHLDBN | Continuous Delay Hidden Layer Deep Belief Network |
| WPD-CSSOA-DBN | Wavelet Packet Decomposition-Chaotic Sparrow Search Optimization Algorithm-Deep Belief Network |
| MSHIF | Multi-Source Heterogeneous Information Fusion |
| DEDBN | Data-Enhanced Deep Belief Network |
| SPRout-DBN | Spatial Pyramid Pooling Residual network with Deep Belief Network |
| M-IPISincNet | Multi-source Physics-Informed Improved SincNet |
| CSS-DADBN | Chaotic Sparrow Search-Domain Adaptive Deep Belief Network |
| GGRU-1DCNN-AdaBN | Gated Recurrent Unit-1D Convolutional Neural Network-Adaptive Batch Normalization |
| IDBO-GRU-MHSA | Improved Dragonfly Optimization-Gated Recurrent Unit-Multi-Head Self-Attention |
| IBKA-VMD | Improved Black Kite Algorithm-Variational Mode Decomposition |
| IMCRA-ISSA | Improved Minimum Controlled Recursive Average-Improved Spectral Subtraction |
| CEEMDAN | Complete Ensemble Empirical Mode Decomposition with Adaptive Noise |
| CIndRNN | Convolutional Independently Recurrent Neural Network |
| FCN | Fully Convolutional Network |
| TIG | Tungsten Inert Gas |
| LPBF | Laser Powder Bed Fusion |
| BiLSTM-KAN | Bidirectional Long Short-Term Memory-Kolmogorov-Arnold Network |
| 4C-FinNet | Four-Channel Financial Network |
| MobileNetV2 | MobileNet Version 2 |
| ConvLSTM | Convolutional Long Short-Term Memory |
| DSS | Decision Support System |
References
- Huang, T.; Qin, Y.B.; Jiang, H. Research on the collaborative scheduling model of “AGV-quay crane-yard crane” in port area based on multi objective optimization. Navig. China 2025, 48, 290–298. [Google Scholar]
- Zhang, L.G.; Li, C.H.; Wang, Y.C.; Zhang, W.; Zhang, Y.W.; Zhang, Z. Parameters of quayside cranes for 24,000 TEU ultra-large container ships. Chin. J. Constr. Mach. 2022, 20, 557–560. [Google Scholar]
- Li, Z.L.; Ma, L.; Xin, Y.L.; Gu, X.K.; Huang, G.S.; Sun, M.X. Engineering Application Research of Novel Anti-corrosion Technology System in Low-latitude Maritime Regions of China. Shipbuild. China 2025, 66, 252–265. [Google Scholar]
- Wang, Z.H.; Claramunt, C.; Wang, Y.H. Extracting global shipping networks from massive historical automatic identification system sensor data: A bottom-up approach. Sensors 2019, 19, 3363. [Google Scholar] [CrossRef]
- Ren, G.; Liu, Z.; Sun, W. Review of Research on Mechanical Fault Detection Technology. Agric. Eqlipment Veh. Eng. 2021, 59, 69–73. [Google Scholar]
- Guo, X.; Feng, B.; Li, Y.; Shen, H. A Brief Discussion on Methods and Significance of Traditional Fault Diagnosis. Consum. Guide 2017, 31, 1–270. [Google Scholar] [CrossRef]
- Li, Y.; Xiao, B.; Huang, J. Application of Vibration Online Monitoring Systems in Port Machinery. Lift. Transp. Mach. 2022, 2, 69–75. [Google Scholar]
- Peng, C. Summary of fault diagnosis and prediction methods based on deep learning. Mod. Electron. Technol. 2022, 45, 111–120. [Google Scholar]
- Mohammed, A.; Hussain, M. Advances and challenges in deep learning for automated welding defect detection: A technical survey. IEEE Access 2025, 13, 94553–94569. [Google Scholar] [CrossRef]
- Nohwal, A.; Patel, N.; Aravindan, S.; Jha, S. Deep learning for automated defect recognition in tungsten inert gas welds of stainless steel 304. Measurement 2025, 253, 117850. [Google Scholar] [CrossRef]
- Zhao, J.L.; Yang, Z.H.; Chen, Q.P.; Zhang, C.; Zhao, J.H.; Zhang, G.Q.; Dong, F.; Liu, S. Real-time detection of powder bed defects in laser powder bed fusion using deep learning on 3D point clouds. Virtual Phys. Prototyp. 2025, 20, e2449171. [Google Scholar] [CrossRef]
- Xu, J.Y.; Fang, X.W. ATT-BLKAN: A hybrid deep learning model combining attention is used to enhance business process prediction. IEEE Access 2025, 13, 36175–36189. [Google Scholar] [CrossRef]
- Contuzzi, N.; Galiano, A.M.; Casalino, G. Integrated IoT-based production, deep learning, and business intelligence approaches for organic food production. J. Ind. Inf. Integr. 2025, 46, 100850. [Google Scholar] [CrossRef]
- Wu, B.D.; Hong, S.Y.; Lin, R.H. Explainable prediction for business process activity with transformer neural networks. Knowl. Inf. Syst. 2025, 67, 9221–9252. [Google Scholar] [CrossRef]
- Bai, Y.H.; Gao, Y.H.; Wan, R.Z.; Zhang, S.; Song, R. A review of reinforcement learning in financial applications. Annu. Rev. Stat. Its Appl. 2025, 12, 209–232. [Google Scholar] [CrossRef]
- Yang, S.M.; Li, C.; Li, Z.X.; Li, T.; Wang, Z.G. 4C-FinNet: A multi-channel feature map and spatio-temporal feature fusion method for financial risk prediction. Expert Syst. Appl. 2025, 284, 127789. [Google Scholar] [CrossRef]
- Chabot, M.; Bertrand, J.L. Adaptive flood risk management: A decision support system integrating deep learning, digital twins, and economic risk assessment. Glob. Environ. Change 2025, 95, 103069. [Google Scholar] [CrossRef]
- Bohlol, P.; Bakherad, A.; Omid, M.; Firouz, M.S.; Hosseinpour-Zarnaq, M. Deep learning approach and adaptive data augmentation technique for non-destructive quality recognition of exported saffron. J. Food Compos. Anal. 2025, 144, 107758. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, J.; Cheng, Y.; Wang, J.; Hu, K. Memory-enhanced hybrid deep learning networks for remaining useful life prognostics of mechanical equipment. Measurement 2022, 187, 110354. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhou, T.; Huang, X.; Cao, L.; Zhou, Q. Fault diagnosis of rotating machinery based on recurrent neural networks. Measurement 2021, 171, 108774. [Google Scholar] [CrossRef]
- Wang, C.; Li, B.; Jiao, B. Fault Diagnosis of Rolling Bearing Based on Convolutional Neural Network of Convolutional Block Attention Module. J. Phys. Conf. Ser. 2021, 1732, 12045. [Google Scholar] [CrossRef]
- Zhao, K.; Jiang, H.; Liu, C.; Wang, Y.; Zhu, K. A new data generation approach with modified Wasserstein auto-encoder for rotating machinery fault diagnosis with limited fault data. Knowl.-Based Syst. 2022, 238, 107892. [Google Scholar] [CrossRef]
- Zhang, Y.; Ji, J.; Ma, B. Fault diagnosis of reciprocating compressor using a novel ensemble empirical mode decomposition-convolutional deep belief network. Measurement 2020, 156, 107619. [Google Scholar] [CrossRef]
- Yin, G.; Zhu, M.; Yan, Y.H.; Wang, H.J.; Jiang, M.H.; Liu, Q.L. DMIFD: A deep learning-based method for multimodal industrial fault diagnosis. Chin. J. Sci. Instrum. 2025, 46, 215–227. [Google Scholar]
- Tao, J.P.; Zhang, W.D.; Zhong, Q.W.; Peng, L.L.; Zheng, S.B.; Chen, X.Q. Bearing Fault Diagnosis Based on Adaptive Denoise Residual Network with Image Features of Vibration Signals. Noise Vib. Control 2024, 44, 109–116. [Google Scholar]
- San Martin, G.; Droguett, E.L.; Meruane, V.; Moura, M.D. Deep variational auto-encoders: A promising tool for dimensionality reduction and ball bearing elements fault diagnosis. Struct. Health Monit. 2019, 18, 1092–1128. [Google Scholar] [CrossRef]
- Morchid, M. Parsimonious memory unit for recurrent neural networks with application to natural language processing. Neurocomputing 2018, 314, 48–64. [Google Scholar] [CrossRef]
- Neupane, D.; Bouadjenek, M.R.; Dazeley, R.; Aryal, S. Data-driven machinery fault diagnosis: A comprehensive review. Neurocomputing 2025, 627, 129588. [Google Scholar] [CrossRef]
- Zhao, J.D.; Wang, W.M.; Huang, J.; Ma, X.L. A comprehensive review of deep learning-based fault diagnosis approaches for rolling bearings: Advancements and challenges. AIP Adv. 2025, 15, 020702. [Google Scholar] [CrossRef]
- Xin, Y.C.; Zhu, J.N.; Cai, M.Y.; Zhao, P.Y.; Zuo, Q.Z. Machine learning based mechanical fault diagnosis and detection methods: A systematic review. Meas. Sci. Technol. 2025, 36, 012004. [Google Scholar] [CrossRef]
- Garcia, J.; Rios-Colque, L.; Peña, A.; Rojas, L. Condition monitoring and predictive maintenance in industrial equipment: An NLP-assisted review of signal processing, hybrid models, and implementation challenges. Appl. Sci. 2025, 15, 5465. [Google Scholar] [CrossRef]
- Duan, L.; Zhao, J.; Qu, H.; Zhang, D.; Qin, T. Gearbox Intelligent Diagnosis Method Based on Deep Belief Network. Sci. Eng. Technol. 2020, 20, 11099–11104. [Google Scholar]
- Li, C.; Xiong, J.; Su, N.; Zhang, Q.; Liang, Q.; Ye, B. Application Review of Deep Learning in Fault Diagnosis. Mach. Tool Hydraul. 2020, 48, 174–184. [Google Scholar]
- Tuerxun, W.; Xu, C.; Guo, H.Y.; Guo, L.; Yin, L.J. Fault classification in wind turbine based on deep belief network optimized by modified tuna swarm optimization algorithm. J. Renew. Sustain. Energy 2022, 14, 033307. [Google Scholar] [CrossRef]
- Xie, M.; Deng, Y.L.; Lyu, J. Personalized Recommendation Algorithm Based on Depth-Restricted Boltzmann Machine. J. Data Acquis. Process. 2022, 37, 456–462. [Google Scholar]
- Zhao, X.; Wang, L.M.; Zhang, Y.F.; Han, X.M.; Deveci, M.; Parmar, M. A review of convolutional neural networks in computer vision. Artif. Intell. Rev. 2024, 57, 99. [Google Scholar] [CrossRef]
- Zhao, G.; Zhang, G.; Liu, Y.; Zhang, B.; Hu, C. Lithium-ion battery remaining useful life prediction with Deep Belief Network and Relevance Vector Machine. In Proceedings of the 2017 IEEE International Conference on Prognostics and Health Management (ICPHM), Shanghai, China, 19–21 June 2017. [Google Scholar]
- Yin, A.; Wang, Y.; Dai, Z.; Ren, H. Evaluation Method of Bearing Health State Based on Variational Auto Encoder. J. Vib. Meas. Diagn. 2020, 40, 1011–1016. [Google Scholar]
- Zhao, R.; Yan, R.; Chen, Z.; Mao, K.; Wang, P.; Gao, R. Deep learning and its applications to machine health monitoring. Mech. Syst. Signal Process. 2019, 115, 213–237. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long Short-term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Lawrynczuk, M.; Zarzycki, K. LSTM and GRU type recurrent neural networks in model predictive control: A review. Neurocomputing 2025, 632, 129712. [Google Scholar] [CrossRef]
- Bolhasani, E.; Aboutalebi, S.H.; Merrikhi, Y. Computational models of multisensory integration with recurrent neural networks: A critical review and future directions. Adv. Intell. Syst. 2025; ahead of print. [Google Scholar] [CrossRef]
- Zhou, L.J.; Wang, W.L.; Ji, Y.; Chen, J.X. Research progress on application of machine learning in continuous casting process. China Metall. 2024, 34, 10–21. [Google Scholar]
- Wang, P.L.; Shi, Y. Big Data Development and Corporate Innovation Vitality: A Quasi-Natural Experiment Based on National Big Data Comprehensive Pilot Zones. Stat. Decis. 2025, 41, 174–178. [Google Scholar]
- Wang, J.X.; Yang, S.Q.; Dong, Y.C. Combined Denoising Methods for Complex Signals. Acta Math. Sci. 2025, 45, 1229–1244. [Google Scholar]
- Wei, G.; Chen, M.L.; Luo, H.; Gao, C.F.; Cheng, J.Y.; Wang, J.; Hou, C.Z. Noise reduction method of high frequency signal in dynamic gravimetry. J. Natl. Univ. Def. Technol. 2025, 47, 78–85. [Google Scholar]
- Xi, Y.Z.; Li, B.; Zhang, Y.Z. Fault Arc Diagnosis Method Based on Multi-feature Fusion. Proc. CSU-EPSA 2025. [Google Scholar] [CrossRef]
- Xu, T.Y.; Zheng, Y.; Li, Z.F.; Chen, Y.L.; Chen, Q.J. Fault Diagnosis of Hydropower Unit Shaft System Based on ITTAO-VMID and CNN-BiLSTM. China Rural Water Hydropower. 2025. Available online: https://link.cnki.net/urlid/42.1419.TV.20250715.1037.012 (accessed on 21 October 2025).
- Zhang, B.; Yang, C.; Zheng, H.H.; Yan, J.Y.; Ma, C.Y. Geomagnetic Data Denoising Based on Deep Residual Shrinkage Network. Appl. Geophys. 2025, 22, 820–834. [Google Scholar] [CrossRef]
- Peng, Y.L.; Peng, Y.J.; Wang, S.Y.; Zhou, L.A.; Su, L.L. Improvement of credit risk assessment for agricultural loans based on information and method optimization. Syst. Eng.-Theory Pract. 2025. Available online: https://kns.cnki.net/kcms2/article/abstract?v=vfP_nAZksBKM99oUUbzkh33TMN8PQgaC8LKly-jVA9kHnMeECoxpvKruRf1k1c5UyoviM2HCtUW83Eosdcqkh_e48SUtJ14Vz2ORbasBJBlBSxGtivtQuOyv46Fqw_QswXKBjE0n3unvQ3wA49uD6Lfg7hnIkb7A3VAm21u0Yao=&uniplatform=NZKPT (accessed on 21 October 2025).
- Chen, J.; Chen, Y.; Jiang, H.; Duan, P.B.; Lin, W.Q.; Qiu, X.H.; Xu, Y. Research on Prediction Method of Reactor Axial Power Deviation Based on Combined Feature Selection and Temporal Convolutional Network. Nucl. Power Eng. 2025, 46, 239–247. [Google Scholar]
- Lyu, Y.Y.; Zhang, Y.; Liu, Y.T.; Wang, G.Q. Linear Discriminant Analysis Method for High-Dimensional Data Based on Efficient Covariance Matrix Estimation. Stat. Decis. 2025, 41, 42–46. [Google Scholar]
- Qu, H.Y.; Li, J.; Dai, H.D.; Wang, X.B.; Zhang, Y. Aircraft arc fault identification based on t-SNE dimensionality reduction fusion with SAPSO-BP. J. Electron. Meas. Instrum. 2025. Available online: https://link.cnki.net/urlid/11.2488.TN.20251013.0947.002 (accessed on 21 October 2025).
- Guo, X.; Wu, N.; Cao, X. Fault diagnosis of rolling bearing of mine ventilator based on characteristic fusion and DBN. Ind. Mine Autom. 2021, 47, 14–20. [Google Scholar]
- Li, Y.; Wang, L.; Jiang, L. Rolling bearing fault diagnosis based on DBN algorithm improved with PSO. J. Vib. Shock 2020, 39, 89–96. [Google Scholar]
- Ren, Z.; Yu, T.; Ding, D.; Zhou, S. Fault Diagnosis Method of Rolling Bearing Based on VMD-DBN. J. Northeast. Univ. (Nat. Sci.) 2021, 42, 1105–1110. [Google Scholar]
- Zheng, P.F. Research on Fault Diagnosis Methods for Marine Gearboxes Based on Deep Belief Networks. Master’s Thesis, Wuhan University of Technology, Wuhan, China, 2019. [Google Scholar]
- Tang, J.; Wu, J.; Hu, B.; Liu, J. Towards a fault diagnosis method for rolling bearing with Bi-directional deep belief network. Appl. Acoust. 2022, 192, 108727. [Google Scholar] [CrossRef]
- Liao, X.; Ming, X.; Xia, M. KBRDBN: An interpretable deep belief network for the fault diagnosis of the trolley mechanism in ship-to-shore cranes. IEEE Trans. Instrum. Meas. 2024, 73, 3511212. [Google Scholar] [CrossRef]
- Sun, L.; Tao, X.; Lu, Y. A bearing fault diagnosis method based on hybrid artificial intelligence models. PLoS ONE 2025, 20, e0327646. [Google Scholar] [CrossRef] [PubMed]
- Wang, M.; Xu, J.; Niu, X.; Chen, E.; Liu, P. A novel continuous delay hidden layer deep belief network and its application in life prediction of rolling bearings. Meas. Sci. Technol. 2024, 35, 035113. [Google Scholar] [CrossRef]
- Zhao, F.; Jiang, Y.; Cheng, C.; Wang, S. An improved fault diagnosis method for rolling bearings based on wavelet packet decomposition and network parameter optimization. Meas. Sci. Technol. 2024, 35, 025004. [Google Scholar] [CrossRef]
- Han, D.; Zhang, Y.; Yu, Y.; Tian, J.; Shi, P. Multi-source heterogeneous information fusion fault diagnosis method based on deep neural networks under limited datasets. Appl. Soft Comput. 2024, 154, 111371. [Google Scholar] [CrossRef]
- Xu, D.; Li, C. Optimization of deep belief network based on sparrow search algorithm for rolling bearing fault diagnosis. IEEE Access 2024, 12, 10470–10481. [Google Scholar] [CrossRef]
- Lin, D.; Jiao, W.; Dong, Z.; Rehman, A.U.; Wang, W.; Jiang, Y.; Sun, J. SPRout-DBN: A cross domain bearing fault diagnosis method based on spatial pyramid pooling residual network-DBN. Meas. Sci. Technol. 2024, 35, 125020. [Google Scholar] [CrossRef]
- Zhong, J.; Zheng, Y.; Ruan, C.; Chen, L.; Bao, X.; Lyu, L. M-IPISincNet: An explainable multi-source physics-informed neural network based on improved SincNet for rolling bearings fault diagnosis. Inf. Fusion 2025, 115, 102761. [Google Scholar] [CrossRef]
- Wang, S.; Zhao, F.; Cheng, C.; Chen, H.; Jiang, Y. Threshold-optimized and features-fused semi-supervised domain adaptation method for rotating machinery fault diagnosis. Neurocomputing 2025, 613, 128734. [Google Scholar] [CrossRef]
- Gai, J.; Zhong, K.; Du, X.; Yan, K.; Shen, J. Detection of gear fault severity based on parameter-optimized deep belief network using sparrow search algorithm. Measurement 2021, 185, 110079. [Google Scholar] [CrossRef]
- Huang, X.; Yang, X.; Zhang, X.; Feng, L. An Intelligent Fault Diagnosis Method of Acro-Hydraulic Pipeline Based on DBN. Mach. Des. Res. 2021, 3, 94–98. [Google Scholar]
- Xu, Q.; Zhu, B.; Huo, H.; Meng, Z.; Li, J.; Fan, F.; Cao, L. Fault diagnosis of rolling bearing based on online transfer convolutional neural network. Appl. Acoust. 2022, 192, 108703. [Google Scholar] [CrossRef]
- Ribero, R.F.; Areias, I.A.D.; Campos, M.M.; Teixeira, C.E.; da Silva, L.E.B.; Gomes, G.F. Fault detection and diagnosis in electric motors using 1d convolutional neural networks with multi-channel vibration signals. Measurement 2022, 190, 110759. [Google Scholar] [CrossRef]
- Tang, S.; Zhu, Y.; Yuan, S. A novel adaptive convolutional neural network for fault diagnosis of hydraulic piston pump with acoustic images. Adv. Eng. Inform. 2022, 52, 101554. [Google Scholar] [CrossRef]
- Li, G.; Wu, J.; Deng, C.; Chen, Z. Parallel multi-fusion convolutional neural networks based fault diagnosis of rotating machinery under noisy environments. ISA Trans. 2022, 128, 545–555. [Google Scholar] [CrossRef] [PubMed]
- Chen, Q.; Zhang, F.; Wang, Y.; Yu, Q.; Lang, G.; Zeng, L. Bearing fault diagnosis based on efficient cross space multiscale CNN transformer parallelism. Sci. Rep. 2025, 15, 12344. [Google Scholar] [CrossRef]
- Wang, C.; Yao, Y.; Li, B.; Lin, H.; Yuan, Y.; Zhang, K. Compound fault diagnosis for motor drive system based on adaptive filtering enhanced physical polar diagram and SSA-RICNN. Meas. Sci. Technol. 2025, 36, 086130. [Google Scholar] [CrossRef]
- Yang, J.; Li, X.; Mao, M. Fault diagnosis model via vibration signal analysis with an improved BKA-VMD and CNN-TELM hybrid framework. Energy Sci. Eng. 2025, 13, 781–810. [Google Scholar] [CrossRef]
- Liu, Y.; Xu, Z.; He, Y.; Guo, P.; Mu, K. Acoustic fault diagnosis method for rotating machinery based on improved spectral subtraction and CNN-TCN model. Measurement 2025, 256, 118482. [Google Scholar] [CrossRef]
- Pang, P.; Tang, J.; Zhang, J.; Fang, H.; Hou, Y.; Fang, B. Research on fault diagnosis and feature extraction mechanism of rotating machinery based on WGS-CNN. IEEE Sens. J. 2025, 25, 24485–24508. [Google Scholar] [CrossRef]
- Yang, Z.; Li, W.; Yuan, F.; Zhi, H.; Guo, M.; Xin, B.; Gao, Z. Hybrid CNN-BiLSTM-MHSA model for accurate fault diagnosis of rotor motor bearings. Mathematics 2025, 13, 334. [Google Scholar] [CrossRef]
- Zhong, W.; Pang, B. Intelligent diagnosis method for early weak faults based on wave intercorrelation-convolutional neural networks. Electronics 2025, 14, 2808. [Google Scholar] [CrossRef]
- Yin, C.; Lee, H.P.; Ko, J.H.; Wang, Y. Intelligent fault diagnosis of rolling bearings in strong noise environment: An attention-driven hybrid model based on IENEMD and parallel multiscale CNN. Int. J. Precis. Eng. Manuf.-Green Technol. 2025, 12, 1091–1116. [Google Scholar] [CrossRef]
- Shao, L.; Zhao, B.; Kang, X. Rolling bearing fault diagnosis based on VMD-DWT and HADS-CNN-BiLSTM hybrid model. Machines 2025, 13, 423. [Google Scholar] [CrossRef]
- Bian, C.; Jia, C.; Li, J.; Chen, X.; Wang, P. Rolling bearing fault diagnosis under small sample conditions based on WDCNN-BiLSTM siamese network. Sci. Rep. 2025, 15, 29591. [Google Scholar] [CrossRef]
- Long, Y.; Zhou, W.; Luo, Y. A fault diagnosis method based on one-dimensional data enhancement and convolutional neural network. Measurement 2021, 180, 109532. [Google Scholar] [CrossRef]
- Han, Q.; Liu, J.; Feng, Q.; Wang, S.; Dai, P. Damage Detection Method for Rail Surface Based on Multi-Level Feature Fusion. China Railw. Sci. 2021, 42, 41–49. [Google Scholar]
- Hu, Y.; Chen, H.P.; Cheng, Z.; Zhang, L.; Zhang, Y. Fault Diagnosis for Planetary Gearbox Based on EMID and Deep Convolutional Neural Networks. J. Mech. Eng. 2019, 55, 9–18. [Google Scholar] [CrossRef]
- Yao, M.J.; Tang, X.; Lv, A. Research on fault diagnosis of planetary gearbox based on improved convolutional neural network. Manuf. Technol. Mach. Tools 2021, 7, 141–145. [Google Scholar]
- Du, M.; Wang, B. Fault Diagnosis of Hydraulic Pump Based on Empirical Wavelet Transform and Convolutional Neural Network. Hydraul. Pneum. 2020, 1, 163–170. [Google Scholar]
- Zhao, X.; Yao, J.; Deng, W.; Jia, M.; Liu, Z. Normalized Conditional Variational Auto-Encoder with adaptive Focal loss for imbalanced fault diagnosis of Bearing-Rotor system. Mech. Syst. Signal Process. 2022, 170, 108826. [Google Scholar] [CrossRef]
- He, Z.; Shao, H.; Wang, P.; Lin, J.; Cheng, J.; Yang, Y. Deep transfer multi-wavelet auto-encoder for intelligent fault diagnosis of gearbox with few target training samples. Knowl.-Based Syst. 2020, 191, 105313. [Google Scholar] [CrossRef]
- Li, X.; Jia, X.; Zhang, W.; Ma, H.; Luo, Z.; Li, X. Intelligent cross-machine fault diagnosis approach with deep auto-encoder and domain adaptation. Neurocomputing 2020, 383, 235–247. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, X.; Gao, L.; Chen, W.; Li, P. Ensemble deep contractive auto-encoders for intelligent fault diagnosis of machines under noisy environment. Knowl.-Based Syst. 2020, 196, 105764. [Google Scholar] [CrossRef]
- Shao, H.; Jiang, H.; Zhao, K.; Wei, D.; Li, X. A novel tracking deep wavelet auto-encoder method for intelligent fault diagnosis of electric locomotive bearings. Mech. Syst. Signal Process. 2018, 110, 193–209. [Google Scholar] [CrossRef]
- Shao, H.; Jiang, H.; Lin, Y.; Li, X. A novel method for intelligent fault diagnosis of rolling bearings using ensemble deep auto-encoders. Mech. Syst. Signal Process. 2018, 102, 278–297. [Google Scholar] [CrossRef]
- Yang, J.; Chen, J.; Zhan, X.; Liu, C.; Yang, C. A feature reconstruction and SAE model based diagnosis method for multiple mixed faults. Meas. Sci. Technol. 2024, 35, 086130. [Google Scholar] [CrossRef]
- Ji, M.; Chu, C.; Yang, J. A joint deep learning model for bearing fault diagnosis in noisy environments. J. Mech. Sci. Technol. 2024, 38, 3265–3281. [Google Scholar] [CrossRef]
- Li, X.; Jin, W. A method for diagnosing rolling bearing faults based on SDAE-ADHKELM. Meas. Sci. Technol. 2023, 34, 025004. [Google Scholar] [CrossRef]
- Wu, Z.; Yan, H.; Zhan, X.; Wen, L.; Jia, X. Gearbox fault diagnosis based on optimized stacked denoising auto encoder and kernel extreme learning machine. Processes 2023, 11, 1936. [Google Scholar] [CrossRef]
- Chang, X.; Yang, S.; Li, S.; Gu, X. Rolling element bearing fault diagnosis based on multi-objective optimized deep auto-encoder. Meas. Sci. Technol. 2024, 35, 096007. [Google Scholar] [CrossRef]
- Deng, C.; Deng, Z.; Miao, J. Semi-supervised ensemble fault diagnosis method based on adversarial decoupled auto-encoder with extremely limited labels. Reliab. Eng. Syst. Saf. 2024, 242, 109740. [Google Scholar] [CrossRef]
- Miao, J.; Deng, Z.; Deng, C.; Dong, M. Semi-supervised fault diagnosis method based on dual-stream attention cyclic auto-encoder for rotating components with low label rate. IEEE Sens. J. 2024, 24, 4948–4959. [Google Scholar] [CrossRef]
- Pawlik, P.; Kania, K.; Przysucha, B. Gearbox fault identification using auto-encoder without training data from the damaged machine. Measurement 2025, 242, 115805. [Google Scholar] [CrossRef]
- Chen, Y.; Liu, Y.; Han, S.; Qiao, Y. Multi-component condition monitoring method for wind turbine gearbox based on adaptive noise reduction. IET Renew. Power Gener. 2023, 17, 2613–2624. [Google Scholar] [CrossRef]
- Dun, B.; Wang, F.; Deng, G.; Liu, X. A Rolling Bearing Fault Diagnosis Method Based on Sparse Auto encoder and SVM. In Proceedings of the 12th National Conference on Vibration Theory and Applications, Nanning, China, 15–17 February 2017. [Google Scholar]
- Li, Q.; Hou, R.; Ding, X. Roller bearing fault diagnosis based on improved stacked auto-encoder. Comput. Eng. Des. 2019, 40, 2064–2070. [Google Scholar]
- Guo, L.; Li, N.; Jia, F.; Lei, Y.; Lin, J. A recurrent neural network based health indicator for remaining useful life prediction of bearings. Neurocomputing 2017, 240, 98–109. [Google Scholar] [CrossRef]
- Yang, R.; Huang, M.; Lu, Q.; Zhong, M. Rotating Machinery Fault Diagnosis Using Long-short-term Memory Recurrent Neural Network. IFAC-PapersOnLine 2018, 51, 228–232. [Google Scholar] [CrossRef]
- Ma, J.; Wei, J.; Li, Q.; Xia, L. Variable-speed bearing fault diagnosis based on BDVMD, FRTSMFrBSIE, and parameter-optimized GRU-MHSA. Processes 2025, 13, 498. [Google Scholar] [CrossRef]
- Sun, L.; Zhu, X.; Xiao, J.; Cai, W.; Ma, Q.; Zhang, R. A hybrid fault diagnosis method for rolling bearings based on GGRU-1DCNN with AdaBN algorithm under multiple load conditions. Meas. Sci. Technol. 2024, 35, 076201. [Google Scholar] [CrossRef]
- Yin, S.; Chen, Z. Research on compound fault diagnosis of bearings using an improved DRSN-GRU dual-channel model. IEEE Sens. J. 2024, 24, 35304–35311. [Google Scholar] [CrossRef]
- Wang, Y.; Sun, W.; Liu, H.; Liu, H.; Wang, S.; Zhou, Q. Study on gearbox fault warning based on the improved M-IALO-GRU model. Appl. Sci. 2025, 15, 3175. [Google Scholar] [CrossRef]
- Luo, X.; Yu, F.; Qian, J.; An, B.; Duan, N. An intelligent fault diagnosis model for rolling bearings based on IGTO-optimized VMD and LSTM networks. Appl. Sci. 2025, 15, 4338. [Google Scholar] [CrossRef]
- Ahsan, M.; Hassan, M.W.; Rodriguez, J.; Abdelrahem, M. Enhanced fault diagnosis in rotating machinery using a hybrid CWT-LeNet-5-LSTM model: Performance across various load conditions. IEEE Access 2025, 13, 1026–1045. [Google Scholar] [CrossRef]
- Zhang, B.; Sun, S.; Yin, X.; He, W.; Gao, Z. Research on gearbox fault diagnosis method based on VMD and optimized LSTM. Appl. Sci. 2023, 13, 11637. [Google Scholar] [CrossRef]
- Meng, W.; Zhao, P.; Shi, Y.; Li, L.; Meng, Z. Intelligent fault diagnosis of mechanical engineering using NLF-LSTM optimized deep learning model. Optim. Eng. 2025, 26, 891–912. [Google Scholar] [CrossRef]
- Alkhanafseh, Y.; Akinci, T.C.; Ayaz, E.; Martinez-Morales, A.A. Advanced dual RNN architecture for electrical motor fault classification. IEEE Access 2024, 12, 2965–2976. [Google Scholar] [CrossRef]
- An, Z.; Li, S.; Wang, J.; Jiang, X. A novel bearing intelligent fault diagnosis framework under time-varying working conditions using recurrent neural network. ISA Trans. 2020, 100, 155–170. [Google Scholar] [CrossRef]
- Lee, M.; Bae, J.; Kim, S.B. Uncertainty-aware soft sensor using Bayesian recurrent neural networks. Adv. Eng. Inform. 2021, 50, 101434. [Google Scholar] [CrossRef]
- Zhou, Q.; Shen, H.; Zhao, J.; Liu, X. Bearing Fault Diagnosis Based on Improved Stacked Recurrent Neural Network. J. Tongji Univ. (Nat. Sci.) 2019, 47, 1500–1507. [Google Scholar]
- Wang, K. A Method for Predicting the Health Status of Mechanical Equipment Based on Recurrent Neural Networks. Master’s Thesis, Beijing University of Posts and Telecommunications, Beijing, China, 2019. [Google Scholar]
- Li, C.; Lin, W.; Xu, L. TCN-GAN-based Temporal Traffic Anomaly Detection. J. Inf. Secur. Res. 2025, 11, 907–916. [Google Scholar]
- Li, J.Q.; Liu, R.Y.; Han, X.P.; Huang, T.; He, Y.L. Across Working Conditions Fault Diagnosis of Synchronous Generator Based on Domain Adaptation and Improved Capsule Network. Acta Energiae Solaris Sin. 2025, 46, 629–638. [Google Scholar]
- Yan, G.; Liu, J.F. Weakly Supervised Semantic Segmentation Based on White Box Transformer and Dynamic Convolution. Comput. Technol. Dev. 2025. [Google Scholar] [CrossRef]
- Shan, C.C.; Mei, C.; Li, W.T.; Guo, Y.Y.; Qian, W.X.; Xiong, Z. Semantic Perception Active Learning Method for the Datum Map of Scene Matching Navigation System. Comput. Sci. 2025. Available online: https://kns.cnki.net/kcms2/article/abstract?v=vfP_nAZksBJZpz9HDNbpKJB_QAw3s09HQPGchwrovrEwohu5OedbPKfHJBD9HoJK5xEvc8b4fo8OTKjX4uVHABrIdp80o0PS8FFHmgbNw0na4rMLuPeC9YFE-wvHUX8l99nQtLeJsbO6ShMufCNa3JoBpVFHuI8ppmrv3Rq_JWY=&uniplatform=NZKPT (accessed on 21 October 2025).
- Li, W.Z.; Liu, Q.M.; Ye, C.M.; Wang, Y.J. Research on fault diagnosis of rotating machinery based on deep learning and SMOTE data enhancement. J. Mech. Strength. 2025. Available online: https://link.cnki.net/urlid/41.1134.TH.20250910.0921.002 (accessed on 21 October 2025).
- Yu, H.Y.; Zhu, W.Q. Risks Identification of Artificial Intelligence and Construction of Governance Path. Inf. Stud. Theory Appl. 2025. Available online: https://link.cnki.net/urlid/11.1762.G3.20250901.0932.002 (accessed on 21 October 2025).
- Cheng, X.Y.; Zheng, J.F.; Zhang, Q.; Pei, H.; Jiang, L. Remaining Useful Life Prediction of Equipment Based on Health Index Construction from Multi-Sensor Coupled Data. J. Rocket. Force Univ. Eng. 2025, 39, 11–21. [Google Scholar]
- Yang, P.; Cheng, T.; Xu, M.M.; Min, J.C.; Zhou, D. Common Processes and Performance Analysis of Enterprise Operations Management. Sichuan Nonferrous Met. 2025, 3, 11–14. [Google Scholar]
- Zaporozhets, A.A.; Eremenko, V.S.; Serhiienko, R.V.; Lvanov, S.A. Development of an Intelligent System for Diagnosing the Technical Condition of the Heat Power Equipment. In Proceedings of the 2018 IEEE 13th International Scientific and Technical Conference on Computer Sciences and Information Technologies (CSIT), Lviv, Ukraine, 11–14 September 2018; pp. 48–51. [Google Scholar]
- Zhao, S.S.; Chen, J.F.; He, Y.G.; Zhang, C.L. Online Diagnosis Method of Open-circuit Fault for Four-level Converter Based on Light-weight CNN and PINN. High Volt. Eng. 2025, 1–16. [Google Scholar] [CrossRef]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).