1. Introduction
Rock-socketed piles are a prevalent form of pile foundation utilized in underground bedrock to transfer structural loads of large buildings. They exhibit high bearing performance, low settlement, and allow for the full exploitation of the structural strength of the pile body and the surrounding rock mass. The bearing capacity of rock-socketed piles is attributable primarily to two factors: side frictional resistance and pile base resistance. Among these factors, the side resistance shaft resistance is considered the dominant factor under common working loads [
1,
2,
3]. The development of side resistance is influenced primarily by the shear stress at the pile–rock contact interface, which is largely contingent on the material strength of the pile and the rock body, as well as the interface morphology [
4]. Additionally, extensive laboratory experiments and field observations have demonstrated that the roughness of a hole wall strongly affects the bearing capacity of rock-socketed piles.
In a previous study, Pells et al. [
5] examined the roughness of the sleeves formed via various drilling techniques in Sydney sandstone. They classified the hole wall roughness into four grades on the basis of the size of the concavity and convexity of the inner wall of the borehole. Subsequently, Rowe et al. [
6], Williams et al. [
4], Horvath et al. [
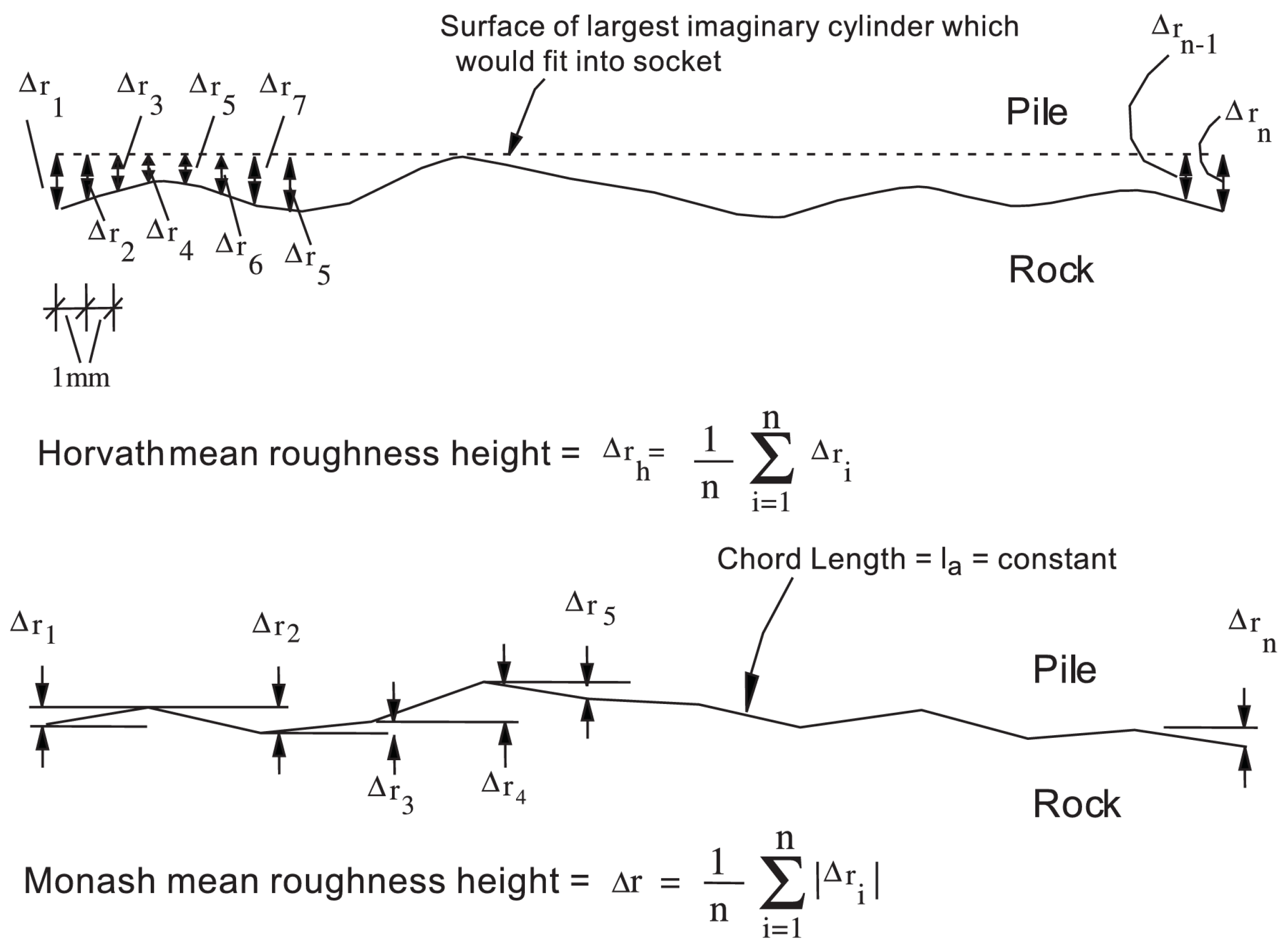
7] investigated the correlation and influencing factors between the side resistance and roughness from different perspectives. Rowe et al. proposed a relationship between the ultimate side friction resistance and hole wall roughness, and Williams et al. noted that the degree of roughness was influenced by the rock type, the drilling method employed, and the drilling speed. Furthermore, Horvath et al. proposed a factor,
, for the quantitative characterization of roughness, which accounts for the socket length, hole radius, and undulation of the sidewall. Seidel et al. [
8] proposed a shaft resistance coefficient SRC that can describe the side resistance–settlement relationship by idealizing the undulating rock surface as multiple short lines of constant length, and assuming that the bump heights are approximated as Gaussian distributions, as shown in
Figure 1.
The aforementioned studies were typically founded upon experimental and idealized analyses. With the swift advancements in computer technology and numerical modeling, the ability to construct intricate pile–rock models, and rapidly solve and compute them has become possible. Numerical simulations, including the finite element method (FEM) [
9,
10,
11,
12], discrete element method (FDM) [
13], and boundary element method (BEM), have been employed by numerous researchers to examine the side resistance [
14,
15,
16] and shear response of rock-socketed piles [
17,
18,
19,
20]. For example, Emirler et al. [
21] utilized a finite element approach to investigate the influence of pile surface roughness on the pile load-carrying capacity and elucidate the associated damage mechanism. Similarly, Gutiérrez-Ch et al. [
15] conducted load tests using a numerical discrete element model of a rock-socketed pile to analyze the effects of different roughnesses on the settlement response and lateral shear capacity. Jiang et al. [
22] solved the load–displacement curves using the finite difference method and assumed that the contact interface was circular and wavy, with the goal of considering the effect of roughness on the bearing capacity.
The roughness data employed in the aforementioned methods is typically measured by a mechanical profilometer [
23]. The amount of data measured by profilometers is relatively small, and the accuracy is relatively low. Liu et al. [
24] utilized an umbrella-shaped aperture gauge to measure the aperture of bored piles and designed the roughness of the pile bodies based on the aperture. Nevertheless, in reality, the aperture cannot completely reflect the roughness of the hole wall. Subsequently, ultrasound was employed to measure the shape of the boreholes [
25]. Since ultrasound utilizes the slurry to transmit sound waves and thereby obtain the positional information of the hole wall, its measurement accuracy is highly influenced by the properties of the slurry. When the density of the slurry is non-uniform, the measured roughness of the hole wall will become unreliable. Conversely, the more advanced laser method has gained widespread acceptance in the field of measurement. The laser’s independence from mud propagation enables it to measure the dry hole and circumvent the inaccuracy inherent in wave velocity calculation, arising from disparate mud properties. The laser sensor is smaller in size, with higher measurement accuracy and efficiency, and is more suitable for the detection of dry boreholes in pile foundations. However, there is a lack of laser equipment available for the detection of dry boreholes in pile foundations.
Owing to the dearth of real and sufficient hole wall roughness data, these previous methods typically employ approximate empirical formulas to calculate the roughness, or utilize a limited amount of local data to represent the overall roughness. Moreover, equivalent roughness factors are commonly applied in simulations, whereas direct numerical simulations utilizing actual three-dimensional models are seldom considered. In fact, sparse data with large errors may weaken the confidence of the simulation results, leading to distortions in the shaft resistance and load curves. Accordingly, a 3D laser scanning-based borehole roughness measurement instrument was developed for the purpose of accurately measuring the point cloud of the borehole wall and extracting the surface roughness. The point cloud is employed to reconstruct the surface model of the borehole in three dimensions, and subsequently, the roughness and morphological undulations of the borehole wall are extracted from the three-dimensional model. Additionally, the reconstructed 3D model was imported into FLAC3D for simulation of the ballast, allowing for the calculation of the bearing response of the rock-socketed pile and the proportion of side resistance to the total bearing capacity. The three-dimensional numerical simulation provides a comprehensive and effective response to the bearing characteristics and settlement characteristics of the pile foundation. Finally, the extracted roughness is introduced into the approximate empirical formula to calculate the theoretical axial side resistance of the pile, thereby verifying the validity of the results of the three-dimensional numerical simulation.
2. Method
2.1. Borehole Laser Scanning System
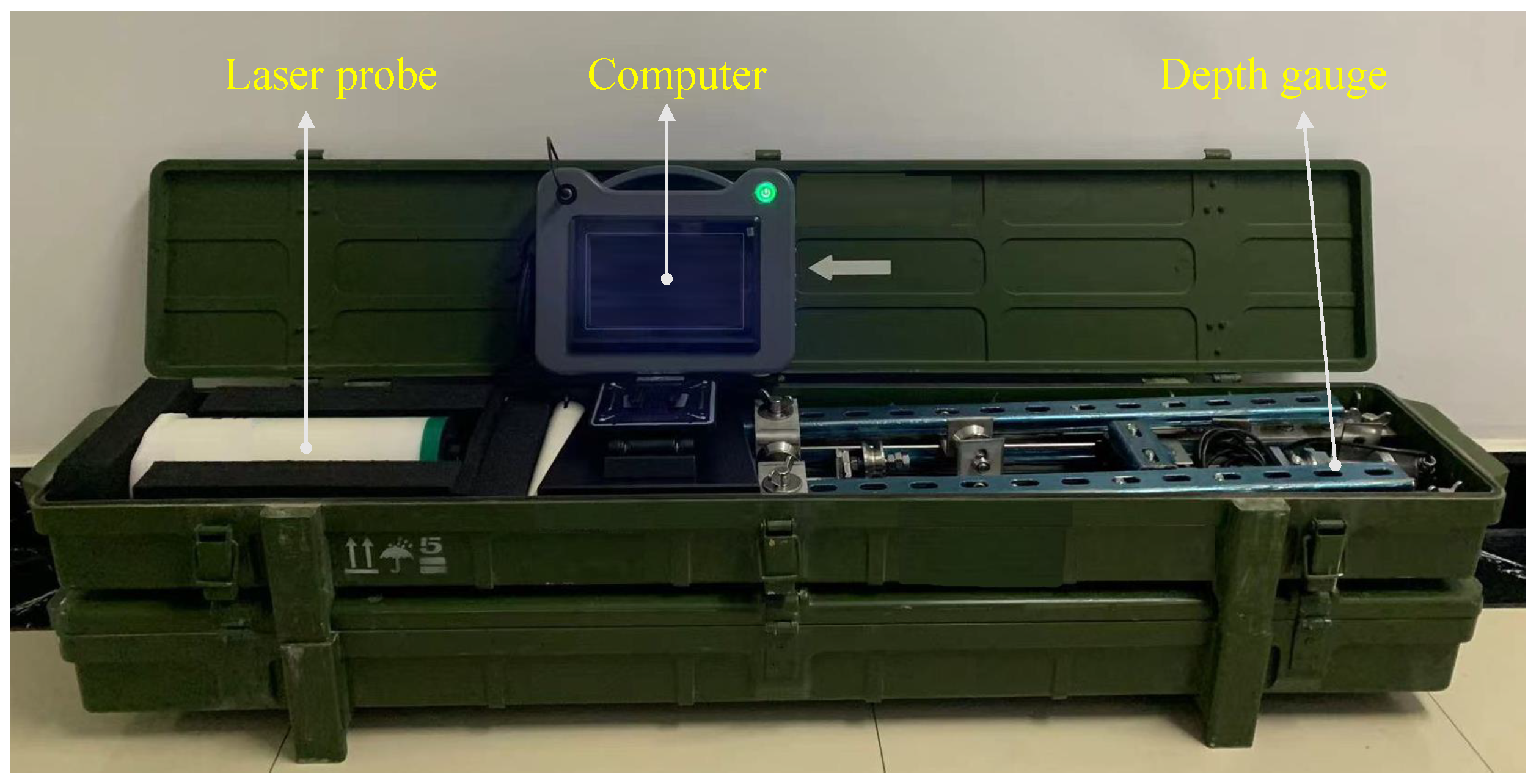
To access the surface morphology of boreholes for rock-socketed piles in situ, a LiDAR-based roughness measurement system was developed. The system utilizes the flight time of the laser to range, enabling the rapid acquisition of the surface morphology of the measured borehole. The system hardware comprises a laser probe, depth gauge, stabilizer, computer, CNC winch, and the necessary power supply and data transmission cables. A photograph of the main components of the laser system is shown in
Figure 2. The system is capable of automatically measuring dry boreholes of varying diameters and depths, with a minimum diameter of 0.1 m, and can complete the sizing process with high precision and efficiency.
In the field, the devices are positioned as illustrated in
Figure 3, with a computer utilized to oversee the entirety of the measurement process. The CNC winch is employed to lower and elevate the LiDAR in a vertical trajectory, and the sampling density of the drilling point cloud can be regulated by modulating the lowering velocity. A depth gauge is affixed to the winch and linked to the LiDAR via a cable, enabling real-time recording of the depth at which the LiDAR was situated. The LiDAR continuously emits laser beams and receives reflected signals from the borehole wall while descending at a constant speed. It also continuously rotates to scan the borehole wall step by step, recording and transmitting the time difference and rotation angle in real time. A corrector is employed to mitigate the impact of laser vibration on the measurement accuracy.
The above raw data were summarized in a computer for processing to obtain the 3D point cloud data of the borehole. First, the ranging and angular values recorded by the laser probe were used to calculate the 2D polar coordinate positions of the points on the rock surface within the borehole, and this polar coordinate system, with the center of the laser sensor at the time of the measurement as the origin, represents the cross-section of the borehole at different depths. The depth data were subsequently introduced to transform the 2D coordinates of the points into the 3D coordinate system in which the entire borehole is located. This conversion process is shown in Equation (
1),
where
c is the speed of light,
t and
is the time and angular values recorded by the laser probe, respectively.
2.2. Reconstruction of Borehole Models
The raw point clouds acquired via laser scanning are typically of inferior quality and contain noise and outliers resulting from the subsurface environment, equipment errors, and other factors. To reconstruct a superior mesh model, these data must undergo filtering to remove these artifacts. As outliers are characterized by a sparse distribution, and are situated at a considerable distance from the main body of the point cloud, they can be effectively removed through the utilization of statistical filtering. Statistical filtering is a method of removing outliers on the basis of the density of the point cloud. The fundamental premise is to initially traverse and calculate the distance between each point and its K nearest neighbors, which satisfies a Gaussian distribution. The distances of each point are subsequently compared with the population mean and variance, with points outside the n-fold variance considered outliers. Additionally, noise is typically Gaussian distributed near the hole wall and is eliminated through bilateral filtering. Compared with the commonly utilized Gaussian filtering, nonlinear bilateral filtering is capable of more effectively preserving the edge features of the point cloud while simultaneously facilitating superior handling of Gaussian noise. This prevents the loss of the roughness of the whole wall due to excessive smoothing.
Given the discontinuous nature of the 3D point cloud, it is not possible to extract and numerically simulate the roughness of the continuous hole wall. Accordingly, this paper presents a methodology for extracting a continuous surface model of a borehole from an unorganized point cloud. There are numerous surface reconstruction algorithms that are based on point clouds. In this paper, we utilize the Delaunay triangulation algorithm, which preserves the original position of the points. Unlike other algorithms, this approach does not alter the position of the point cloud, ensuring that the dissection results are unique and accurately reflect the true geometric features of the borehole. Additionally, it avoids smoothing the surface of the model, thus preventing any adverse effects on the roughness of the borehole surface.
2.3. Roughness Measurement and Characterization
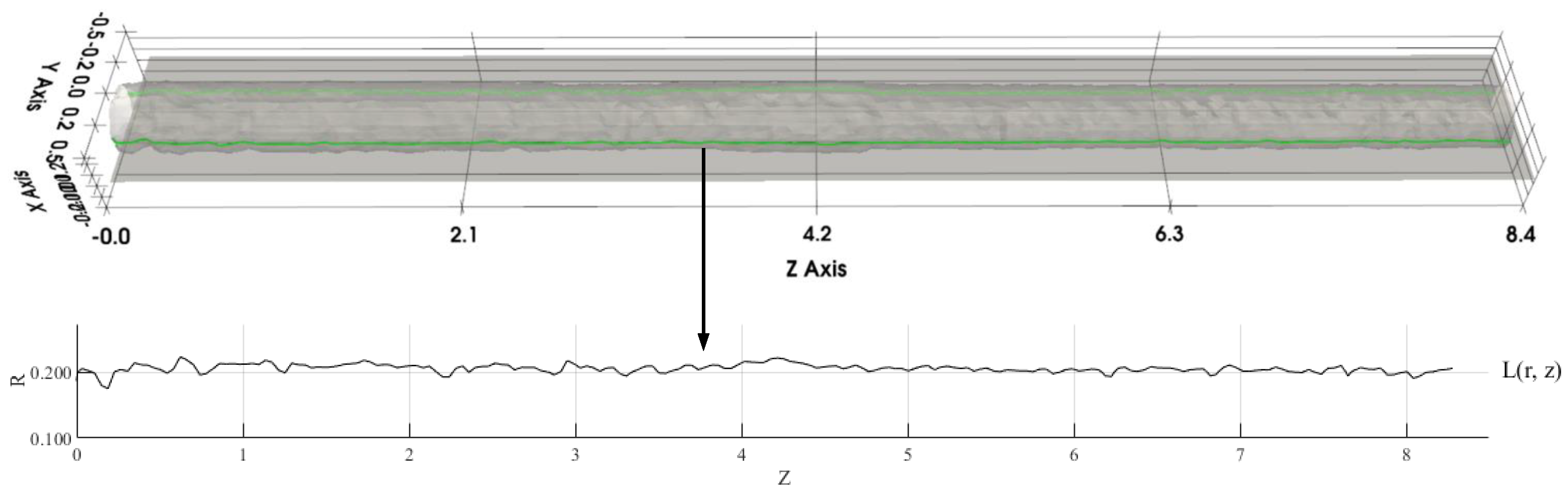
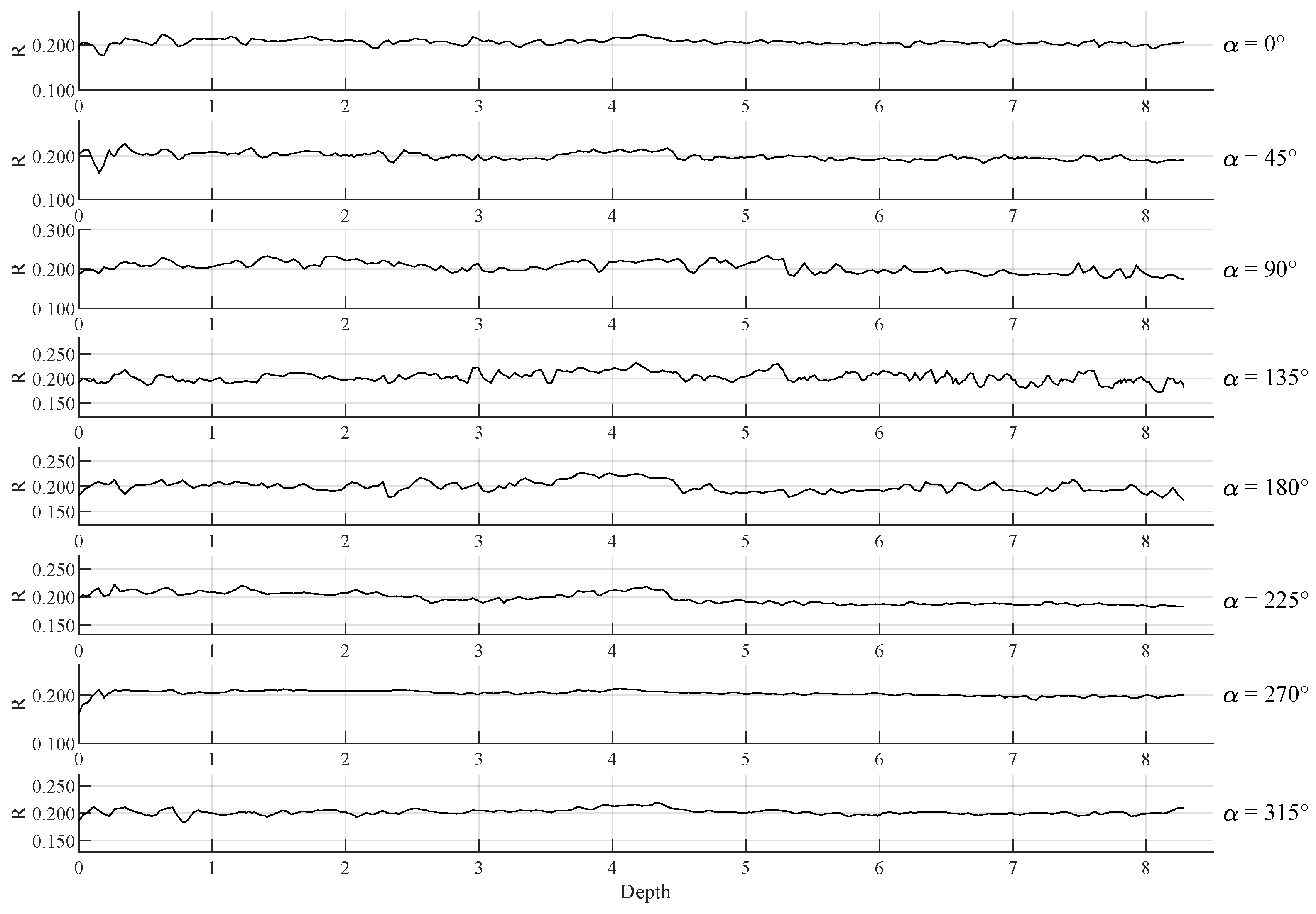
When the vertical bearing capacity of rock-socketed piles is considered, the roughness of the borehole wall in the vertical direction is the main concern because the shear action mainly occurs in the vertical direction. The reconstructed 3D mesh model is vertically dissected to extract the contour lines of the borehole in different orientations. Taking the central axis of the borehole as the center axis, the borehole is sectioned using planes with different angles, and the intersection lines between the planes and the surface model are the vertical contour lines of the corresponding angles, as shown in
Figure 4. Moreover, since the surface model is continuous in three-dimensional space, it is theoretically possible to intercept countless contour lines with different orientations, thus obtaining the complete 360° roughness information of the drill hole.
To characterize the roughness of the drilled hole contour lines, the roughness factor
proposed by Horvath is introduced.
is calculated according to Equation (
2), where
r is the average roughness height,
is the radius of the drilled hole,
is the length of the bumpy and undulating contour lines, and
is the nominal hole depth. Given that the extracted contour lines are in 3D coordinates, a conversion to radius undulations along the depth direction is undertaken in accordance with the specifications set forth in Equation (
3).
2.4. FLAC3D Modelling
This section outlines the methodology for utilizing the reconstructed 3D surface model and FLAC3D for numerical simulation, with the objective of determining the ballast response of the rock-socketed pile. Given that the filled concrete can better accommodate the shape of the borehole, and that the shape of the pile is primarily determined by that of the borehole, it is possible to replace the geometric model of the pile with the reconstructed borehole model. In the traditional use of FLAC3D for load simulation, the lack of realistic pile geometry, and the difficulty of modeling many uneven microelements in detail, have led to the use of smooth cylinders endowed with certain shear parameters instead of real piles. However, this approach fails to account for the varying directions and magnitudes of the undulations, and the accuracy of the results is contingent upon the precise specification of the roughness and friction parameters. In this regard, this paper employs a 3D mesh model based on actual measurements for numerical simulation, which increases the model preprocessing procedure and the complexity of solving the calculation but reduces the error introduced by parameter estimation. The simulation results are more accurate, and more comprehensively reflect the bearing performance of the pile foundation.
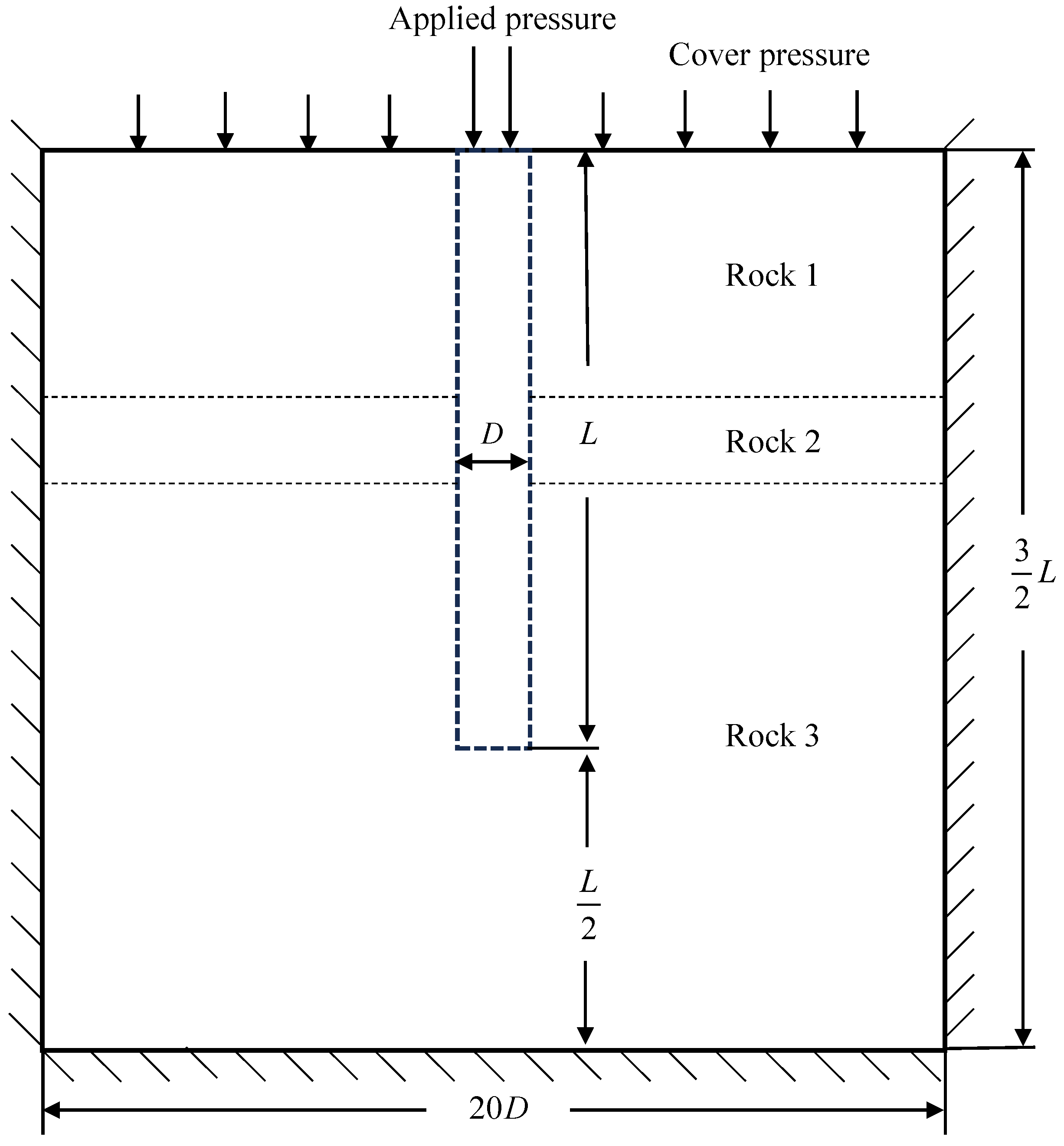
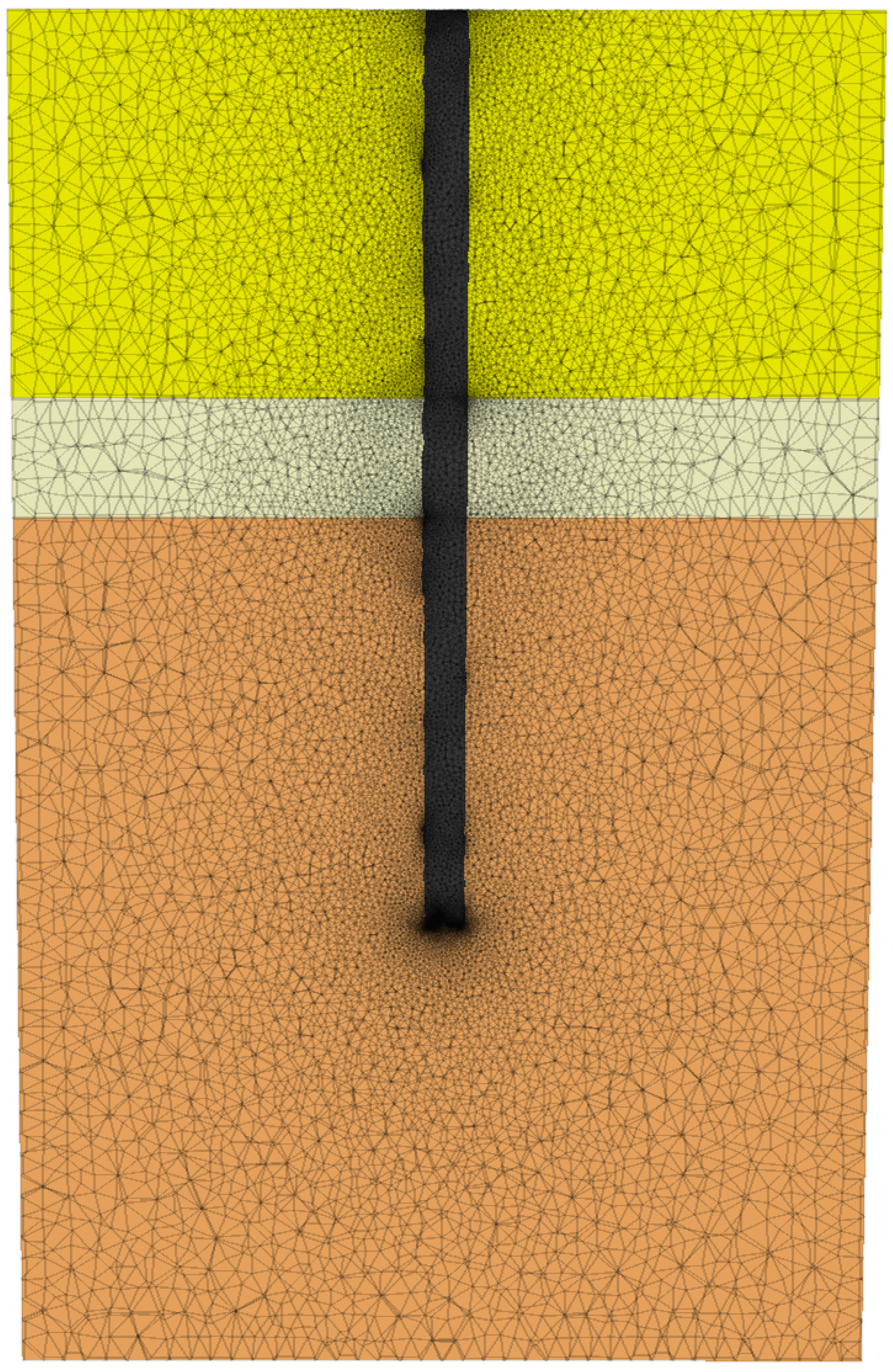
The surface model, reconstructed from the point cloud, contains a multitude of complex triangular meshes of varying dimensions. This method lacks the upper and lower surfaces of the unmeasured pile, which cannot be directly imported into FLAC3D for simulation. Accordingly, a model preprocessing stage was incorporated into the workflow to ensure the construction of a comprehensive and accurate pile–rock model. In this work, the top and bottom surfaces of the reconstructed model were complemented using Rhinoceros 8 modeling software, thereby forming a closed pile model. The pile body is subsequently positioned at the coordinate center, and several different stratigraphic models are constructed around the pile body in accordance with the actual conditions of the strata. The overall dimensions of the stratigraphic models are illustrated in
Figure 5. They have a length and width of
and a height of
, where
D and
L are the diameter and length of the pile, respectively. This range is sufficient to avoid the boundary effect of the geotechnical soil on the results, as previously discussed in reference [
26].
The pile–rock model is imported into FLAC3D for simulation, and the load test can be divided into 3 steps. In Step 1, the initial ground stress induced by gravity in the experimental area is generated. The pile and rock are set as elastic–plastic Mohr–Coulomb materials, and the real ground material parameters are input into the FLAC3D intrinsic model. These parameters are typically derived from geotechnical tests of core materials in the field. Given that the pile body passes through different strata, care is taken to set the parameters at different depths of the pile body to the model parameters of the corresponding strata. The boundary conditions are then set according to the actual stresses, as shown in
Figure 5, the normal displacements at the sides and bottom of this modeled area are fixed, and the normal displacements at the top surface of the pile and the upper surface of the strata are set to be free. In addition, the surface of the rock formation supporting the rock-socketed pile is usually covered with a soft soil layer, which contributes minimally to the side friction resistance. Modeling it as a soil layer for simulation increases the number of meshes and computation time but has a smaller effect on the simulation results. Therefore, a certain normal pressure is applied on the top of the model to simulate the pressure generated by the weight of the soft soil instead of establishing a solid model of the soil layer. After the above setup is complete, the initial equilibrium ground stress is resolved, the initial displacements in all directions are set to zero, and the current model is saved.
In Step 2, the contact surface model of the pile–rock interface is generated. An interface is utilized as the contact surface model, which is a non-thickness unit provided by FLAC3D for shear deformation of complex contact surfaces. The interface is modeled using the “shift-around method”, and the pile body is set as a linear elastic material. Given that the shear strength of the surrounding rock and soil is much lower than that of the concrete under the working load of the rock-socketed pile, the intrinsic model of the pile is considered a linear-elastic material. The equilibrium stress state of this model should subsequently be resolved after placing the pile.
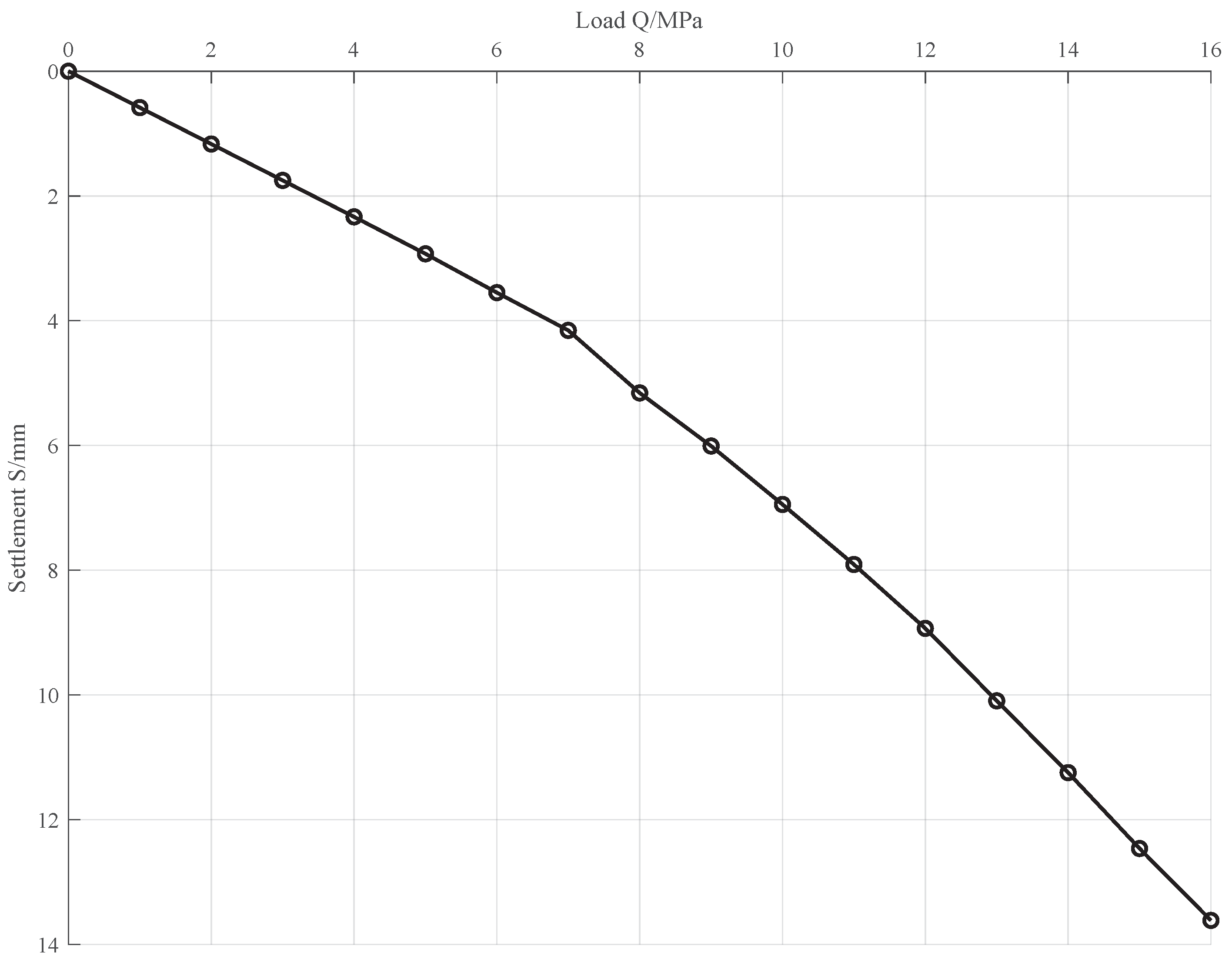
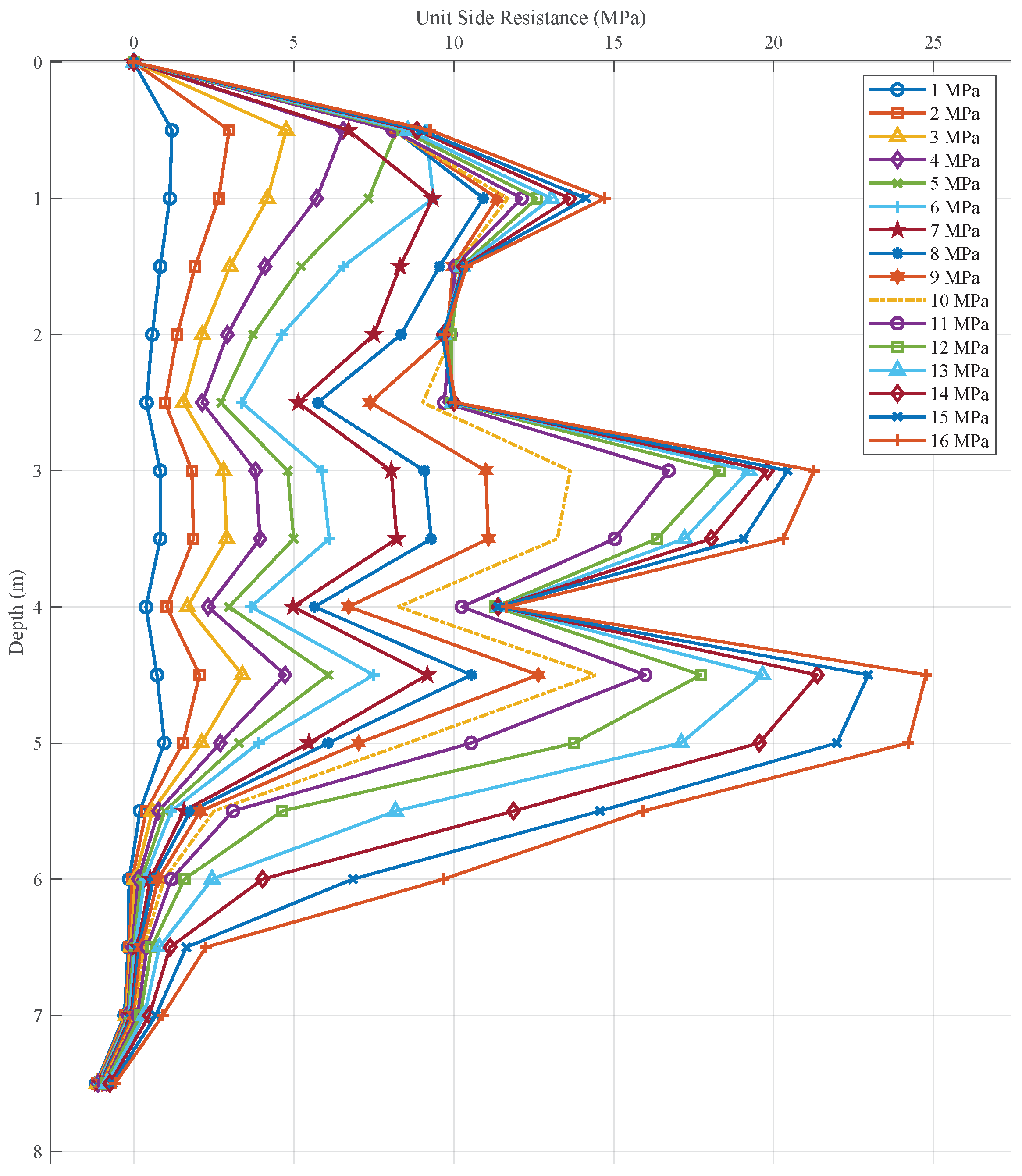
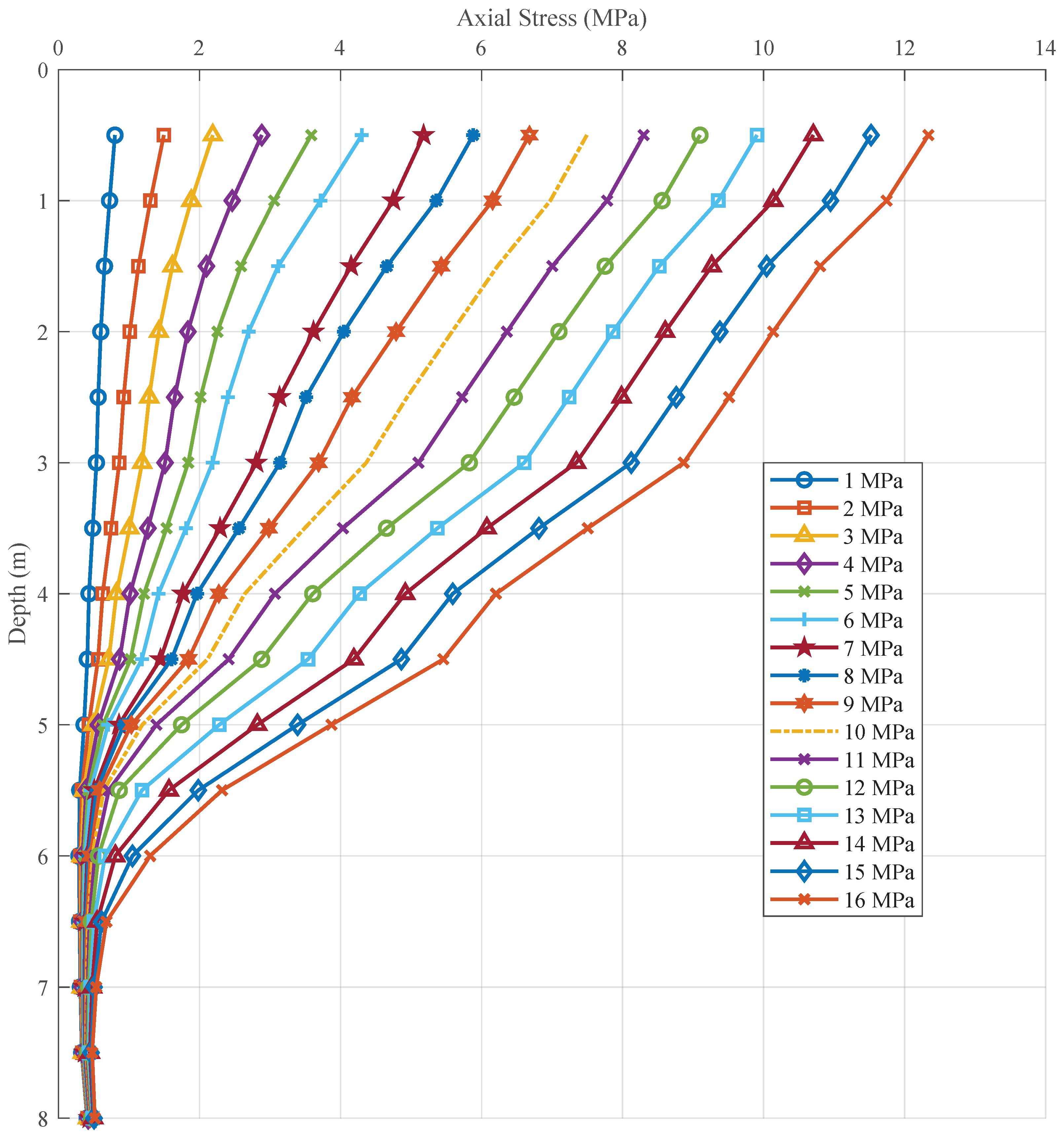
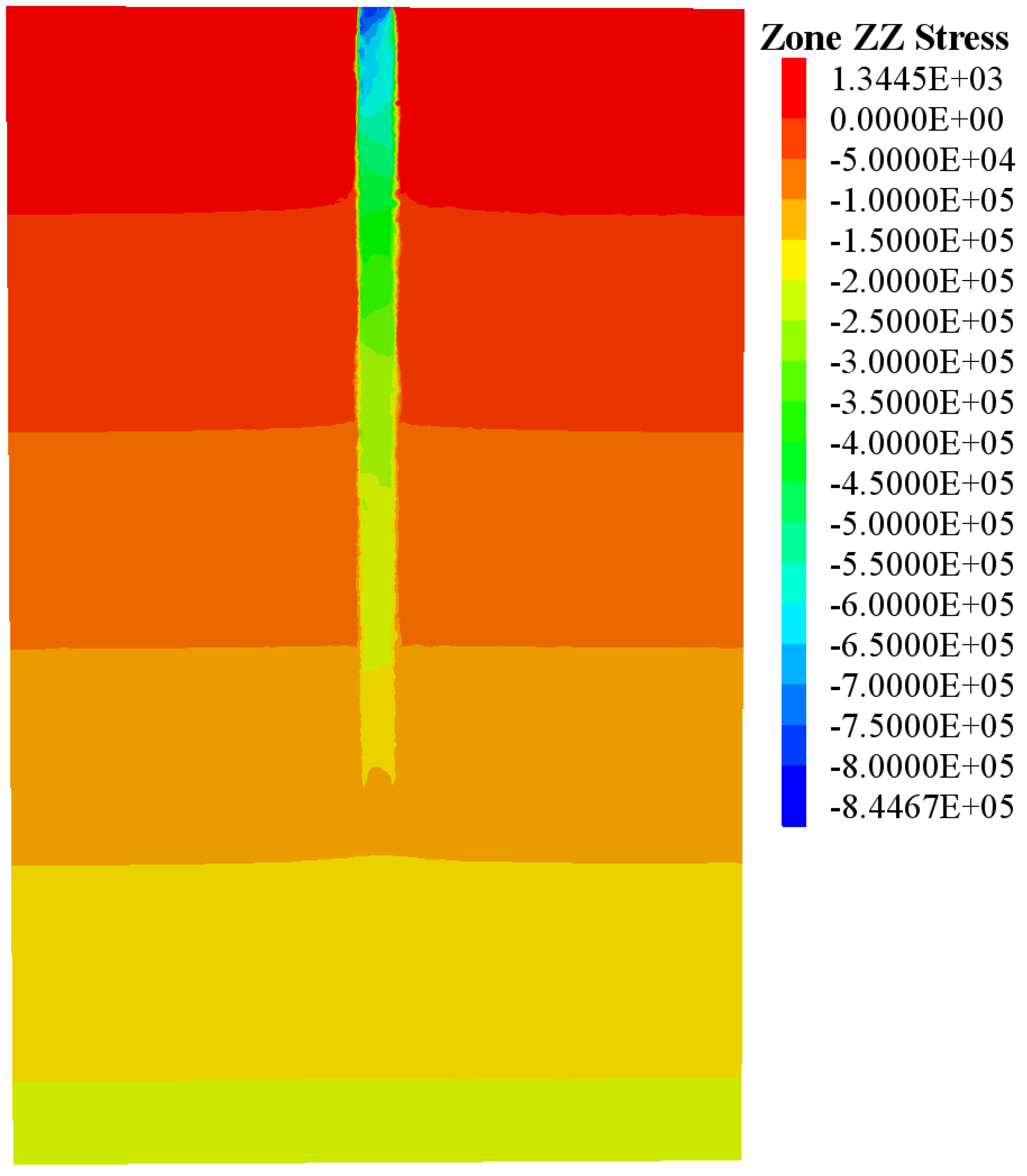
In Step 3, the load–displacement response of the pile foundation is resolved. First, the range and step size of the applied stress are determined. The stress is gradually applied to the top surface of the pile, and then increases again after equilibrium is reached. In this work, a step size of 1 MPa is employed until the specified maximum stress of 16 MPa is attained, which is achieved through the use of FISH loop construction. The large strain mode of FLAC is employed to guarantee the precision of the position and contact detection calculations and to forestall the model’s excessive movement in relation to one another, which could otherwise result in the failure of the solution. At the same time, the history of the stresses and displacements at the top and bottom of the pile are recorded, as are the stresses at different depths of the pile.
4. Conclusions
This paper presents a device for in situ measurement of socket sidewall roughness, and a numerical modeling method based on real measurement data. A laser scanning system for measuring the morphology of dry boreholes is designed to rapidly acquire numerous point clouds of the hole walls. The paper then outlines the process of extracting the roughness of the borehole from the surface model reconstructed from the point cloud, and proposes a method for load simulation in FLAC3D using the reconstructed 3D surface model. Compared with existing methodologies, the proposed approach offers a more realistic and comprehensive evaluation of the bearing performance of rock-socketed piles, providing a basis for decision-making in the construction design of rock-socketed piles. Under the condition of accurate parameter assignment, the side resistance and bearing capacity of the pile foundation can be predicted with greater accuracy.
A real borehole for a rock-socketed pile was tested and simulated, and the results demonstrated that the laser system accomplished the measurement of the borehole wall, and that the 3D model of the borehole was successfully constructed. On the basis of the reconstructed model, the roughness of the contour lines in different orientations was extracted, and the average of the hole was 0.036. A load test was subsequently conducted in FLAC3D using the measured 3D model. The simulation results demonstrate that in this pile, the load is affected by both the side resistance and the end resistance, with the side resistance being the dominant factor. The ultimate bearing capacity can be selected by the settlement threshold.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}