1. Introduction
With the widespread integration of distributed energy sources supply to the power grid, the penetration rate of power electronic equipment in the electronic power system is gradually increased. This phenomenon leads to the low-inertia, weak damping, and weak frequency support characteristics of the traditional power system [
1,
2], significantly affecting its stability and security. To address the issue of grid instability and frequency oscillations arising from the high proportion of renewable energy [
3,
4], some scholars, drawing from the operational characteristics of synchronous generators, introduced virtual inertia and damping links through the simulation of its power swing equation. Based on this, VSG control technology is proposed [
5,
6]. This control strategy makes the grid-connected converter capable of primary frequency regulation (PFR) and one-time voltage regulation, improving the anti-interference ability of the system [
7].
Introducing virtual inertia and damping mechanisms is an effective strategy for improving the system’s PFR capability and enhancing the dynamic stability of the system’s frequency. However, the traditional virtual inertia control strategy alters the system characteristics of the TVSG’s APL from first-order to second-order oscillatory characteristics, resulting in transient oscillations within the VSG’s grid-connected system during active power and grid frequency disturbances [
8], weakening the dynamics of the APL system. The introduction of damping mechanisms can be viewed as an equivalent to increasing PFR parameters; however, larger damping parameters may result in greater steady-state deviations within the APL [
9,
10]. Therefore, the TVSG based on a fixed damping strategy contradicts transient performance and steady-state performance, which cannot eliminate the problem of active steady-state deviation caused by damping characteristics while suppressing transient oscillation [
11].
Researchers have embarked on an extensive array of studies to tackle the identified technical difficulties and refine the active power response performance within the TVSG. These investigations are categorically divided into two distinct approaches: the adaptive virtual inertia damping methodology [
12] and the equivalent damping ratio strategy [
13]. To enhance the response rate of TVSG steady-state frequency tracking, a VSG control strategy based on the intermittent variation in virtual inertia is proposed in [
14]. However, this intermittent variation introduces redundant nonlinear characteristics that adversely affect the system’s stability. The authors of [
15] introduce a fuzzy controller into the VSG power swing equation to enhance the system’s response performance during transient processes while also addressing the adverse effects of discontinuous virtual inertia settings on system stability. The authors of [
16,
17] propose a VSG control strategy incorporating synergistic adaptive virtual inertia and damping parameters, which not only enhances the transient stability of the power outputs of the VSG system but also further mitigates frequency deviations resulting from active power disturbances, thereby improving the dynamics of the APL system. However, it is important to note that most aforementioned studies are predicated on stable operating conditions of the grid, concentrating on enhancing system stability under small disturbances, and thus failing to address the steady-state deviations arising from the coupling of damping and frequency modulation parameters. Furthermore, the improper selection of adaptive parameter ranges can adversely impact the steady-state performance of VSG grid-connected systems.
In the context of equivalent damping ratio methodologies, the authors of [
18] conducted a qualitative analysis of the fault limit clearing time and the fault limit clearing angle in the VSG and established the influence mechanisms between control parameters and the transient characteristics of the APL system in the TVSG. Based on this, a control strategy with flexible parameter selection to optimize the transient performance of the VSG is proposed. However, if the fault persists for an extended duration, the VSG will still encounter the challenge of desynchronization with the grid. The authors of [
19] incorporate first-order differential compensation into the power swing equation of the VSG, effectively suppressing transient oscillations within the system without impacting the steady outputs of the APL system in the TVSG during grid-connected operation. However, this control strategy neglects the influence of high-frequency interference signals on system stability. The authors of [
20,
21] introduce the first-order lead–lag compensator within the VSG damping feedback loop, enhancing the dynamics of the VSG while mitigating high-frequency interference effects during transient disturbances. However, this scheme does not describe the dominant pole assignment process for the APL. The authors of [
22] introduce band-pass damping feedback control into the APL to construct transient damping managed by the VSG, enhancing the system’s transient oscillation suppression performance. However, incorporating band-pass damping transforms the APL controlled by the VSG from a second-order system to a fourth-order system, which complicates the parameter design and may lead to power shocks.
In addition, other scholars have explored controlling inertia and damping parameters in the APL by introducing fuzzy logic [
23] and robust control [
24]. In [
25], a VSG control strategy based on fuzzy logic is provided, which effectively makes the dynamics of the APL more robust with increased adaptivity of damping and inertia. In [
26], an adaptive control strategy predicated on the radial basis function (RBF) algorithm is applied. By introducing the RBF neural network into the APL system, this strategy adaptively adjusts the virtual inertia and damping coefficient, effectively enhancing the system’s dynamic performance. However, the design of the fuzzy controller requires experienced personnel to verify its efficacy, and the difficulty of the design increases with the complexity of the electrical power system. Control strategies developed using neural network concepts require substantial data and time to assess their effectiveness, presenting challenges such as high sample dependency and a complex algorithmic structure.
In view of the above problems, this article firstly establishes a closed-loop small-signal model of the TVSG under given power and grid frequency variations, analyzes the transient oscillation mechanism of the TVSG combined with root locus, and reveals the contradiction between the transient performance and steady-state performance of the TVSG control strategy. Secondly, a VSG control strategy incorporating Transient Damping Compensation (TDC) and virtual inertia adaptation is proposed. Utilizing the pole distribution trend and frequency response, the influence of control parameters introduced by TDC on system stability is qualitatively analyzed, and a tuning scheme for related control parameters is provided based on the dominant pole method. Subsequently, an improved virtual inertia adaptive strategy based on the ISRU approach rate is designed based on the TDC algorithm, providing the value range for adaptive changes in virtual inertia to optimize the dynamics of the TDC-VSG. Finally, the proposed strategy’s effectiveness is verified through Matlab/Simulink simulations and Hardware-in-the-Loop (HIL) semi-physical experiments.
2. Basic Principles of the TVSG
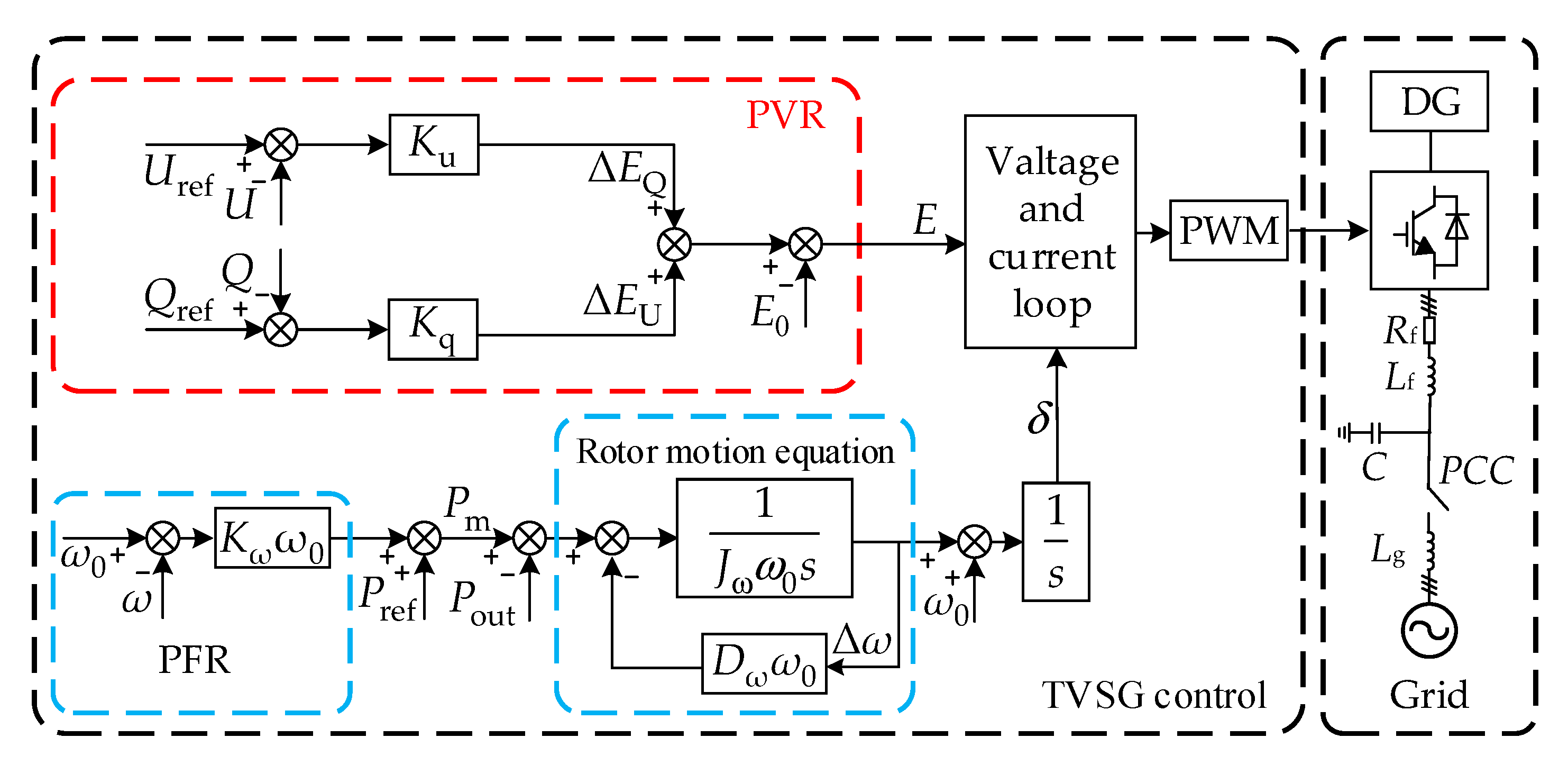
Combined with typical grid-connected converter topology, power swing equation, and electromagnetic equation of the SG, the TVSG main circuit topology and its simplified structure are constructed, as shown in
Figure 1.
Predicated on the second-order mathematical model of the traditional SG, the mechanical equation for the APL controller in the TVSG [
19] is presented in Equation (1):
where
Jω is the virtual inertia;
Dω is the damping coefficient;
ω is the virtual angular frequency;
ω0 is the rated angular frequency; and
Pm and
Pout are, respectively, designated as the VSG’s virtual machine power and output active power.
The virtual mechanical power
Pm is composed of the active power regulation instruction
Pref and the frequency regulation power output by the PFR characteristic, as shown in the following equation:
where
Kω is designated as the FPR coefficient.
Based on the operational principles of the traditional SG reactive power regulator, the primary voltage regulation (PVR) equation for the voltage amplitude command
E, emitted by the TVSG, is presented as follows:
where
E0 is the TVSG’s no-load potential; Δ
EQ is the reactive power regulation deviation; Δ
EU is the voltage regulation deviation;
Kq is the power adjustment coefficient;
Qref is the reactive power adjustment instruction;
Q is the instantaneous reactive power value of the TVSG output;
Ku is the voltage regulation coefficient;
Uref is the voltage regulation instruction; and
U is the instantaneous terminal voltage.
This paper primarily optimizes the dynamics and transient stability of the APL for the TVSG, achieving decoupling control of active and reactive power in the VSG power control link under inductive line impedance conditions [
10]. Consequently, the PVR characteristics of the VSG reactive power loop and voltage–current double closed-loop control strategy are not extensively discussed. Predicated on the above analysis, the TVSG control block diagram is illustrated in
Figure 2.
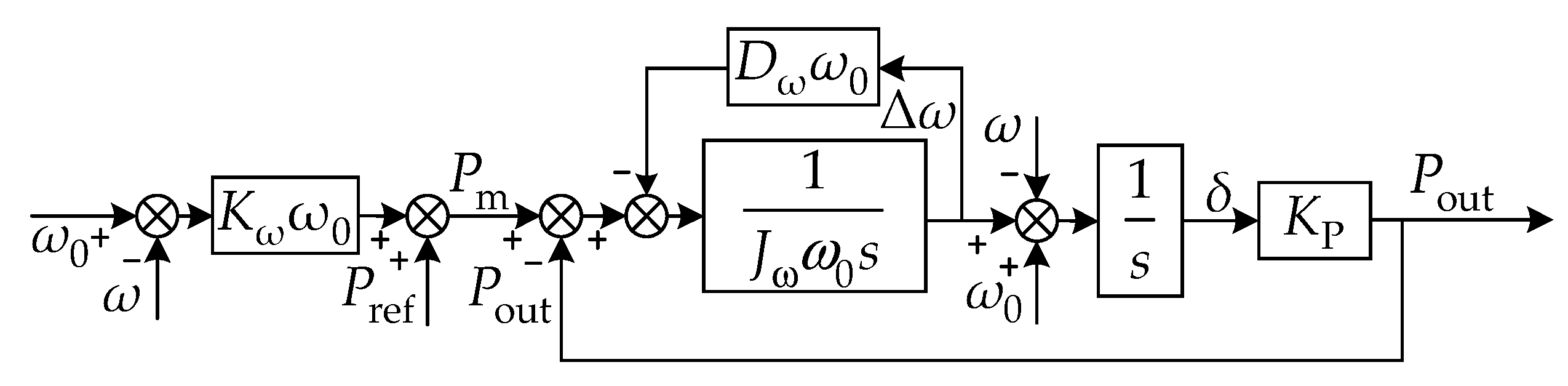
The virtual inertia and damping characteristics in the TVSG system are primarily reflected in the APL characteristics of its power swing equation, specifically the
P-
ω characteristics. Based on Equations (1) and (2), the VSG’s open-loop transfer function is derived as follows:
where
KA represents the power droop coefficient;
τ is the inertial time constant. Equation (4) illustrates that
GP-ω serves as a first-order inertial component. Considering the inherent inertia transition characteristic of
τ, changes in Δ
ω exhibit a lag relative to Δ
P, with the extent of this lag contingent upon parameters such as
Jω,
Dω, and
Kω. The interaction between
Dω and
Kω determines the extent of steady-state deviation in the TVSG’s grid-connected outputs. The selection of
Kω is primarily governed by the system’s rated capacity, and it must also adhere to the criterion that a 100% variation in active power results in a frequency deviation not exceeding ±1% of the rated frequency, corresponding to
Kω = Δ
Pref/(
ω0Δ
ω). Consequently, the effect of
Dω on the steady-state output characteristics of grid-connected VSG systems can be evaluated by adjusting its magnitude. The impact of
Dω on the steady-state output characteristics of the APL system in the TVSG can be assessed by varying the magnitude of
Dω. 4. TDC-VSG Control Strategy
To address the dynamic and static requirements of modern power systems for the VSG during grid-connected operation, this section focuses on damping the transient oscillations caused by active power and grid frequency perturbations. Additionally, it aims to correct the steady-state deviations that result from a fixed damping control strategy. A TDC-VSG control strategy is provided in this section, and a detailed analysis of its transient oscillation suppression performance and comprehensive parameter design methods are provided.
4.1. TDC-VSG Control Principle
To fully reflect the damping characteristics of the VSG during transient oscillations and mitigate the steady-state deviations attributed to these characteristics, a transient damping link based on a first-order differential approach is integrated into the damping feedback loop to enhance the transient stability of the APL system in the TVSG. The specific expression is as follows:
Introducing differential links renders the damping circuit more susceptible to high-frequency interference signals and facilitates an increase in the harmonic components of the control signal [
20]. Therefore, a first-order lead–lag link is incorporated into the APL to enhance the dynamics and high-frequency disturbance rejection of the TVSG damping feedback loop. The specific expression is as follows:
where
TT represents the attenuation time constant of the TDC-VSG;
DT is the transient damping coefficient. Predicated on Equation (11), the block diagram of the TDC-VSG is shown in
Figure 5.
The small-signal model of the APL in the TDC-VSG, considering given power and grid frequency variations, is derived from
Figure 5 as follows:
where
GPTDC(
s) is the closed-loop transfer function of the APL system in the TDC-VSG under given power variations, while
GωTDC(
s) is the closed-loop transfer function of the APL under frequency variations. Coefficient
a1 =
Jωω0 +
TT (
DTω0 +
Kωω0),
b1 =
Kω +
TTKP.Based on Equation (12), the steady output active power Δ
Pouts of the APL system in the TDC-VSG during grid-connected operation can be expressed as follows:
By comparing Equation (8) with Equation (13), the damping characteristics of the TDC-VSG achieve a decoupling operation between the damping characteristics and the PFR characteristics during steady-state operation. As a result, the damping characteristics only affect the transient oscillation process, thus eliminating the steady-state deviation caused by the fixed damping control strategy.
4.2. Transient Performance Analysis of the TDC-VSG
Through the comparison and analysis of Equations (7) and (12), it becomes evident that the TDC-VSG introduces a zero point and a pole into the APL system; the location of the zero point is associated with TT. When TT is small, Equation (12) approximates Equation (7), leading to less pronounced damping characteristics of the TDC-VSG; hence, TT should not be excessively small.
To analyze the influence of control parameters
TT and
DT on the transient stability of the TDC-VSG, the pole distribution trend of
GPTDP(
s) under varying
TT and
DT is constructed in
Figure 6.
Figure 6a shows that at
TT = 0.5, the TDC-VSG’s real pole
sT3 is near the imaginary axis. Similarly, poles
sT1 and
sT2 are also close to the imaginary axis, suggesting that the APL system is prone to oscillation. However, as
DT increases, the real pole
sT3 gradually moves away from the imaginary axis while remaining as a real pole, and
sT1 and
sT2 move closer to the real axis, resulting in enhanced stability performance of the dynamics of the system. At
DT = 17.3, the dominant poles
sT1 and
sT2 transition from conjugate poles to real-axis poles, causing the TDC-VSG system to shift from underdamped to overdamped characteristics, significantly improving oscillation suppression performance, thereby validating the effectiveness of the TDC-VSG.
As shown in
Figure 6b, when
DT = 20, the new pole
sT3 of the TDC-VSG rapidly approaches the imaginary axis with increasing
TT. However, the system stability is primarily influenced by the conjugate poles
sT1 and
sT2, which are very close to the imaginary axis, preventing
sT3 from becoming the dominant pole. Furthermore, as
TT increases, the distance between the conjugate poles and the imaginary axis exhibits only minor changes initially and gradually approaches the imaginary axis later, indicating that the overall variation is limited. This results in a small change in the system’s damping ratio, suggesting that
TT has minimal impact on the transient stability of the APL system in the TDC-VSG. Consequently, the transient stability of the APL system in the TDC-VSG is predominantly determined by the transient damping coefficient
DT. Additionally, a large
TT extends the transient oscillation process due to hysteresis characteristics; therefore, the selection of
TT should not be too large, so this paper takes
TT = 0.5.
To verify the impact of
DT on system stability performance, the unit step response characteristic curve of the APL system in the TDC-VSG under given power and grid frequency variations is constructed based on Equation (12), as shown in
Figure 7. It can be seen from
Figure 7a that increasing
DT enhances the power oscillation suppression characteristics of the system under active power disturbances.
Figure 7b illustrates that introducing
DT eliminates the steady-state deviation caused by the fixed damping control strategy under grid frequency variations; however, excessive transient damping
DT prolongs the recovery time to the steady-state. Thus, the system’s dynamic response performance and stability can be enhanced through a reasonable configuration of
DT. As illustrated in
Figure 7c,d, when
TT is small, the Transient Damping Compensation characteristic of the TDC-VSG is not pronounced, and the system continues to exhibit transient oscillations. When
TT = 0.5, the system’s power oscillation can be effectively suppressed. However, further increasing
TT prolongs the system’s recovery time, aligning with the theoretical analysis above.
4.3. Parameter Design of the TDC-VSG
Predicated on Equation (12), the closed-loop transfer function of the APL system in the TDC-VSG under given power variations is derived as follows:
Based on classical control principles and the theoretical analysis in
Figure 6, the stability performance of the TDC-VSG is primarily influenced by the dominant poles
sT1 and
sT2. Thus, the transient damping parameter
DT can be designed using the dominant pole method [
29] and frequency domain analysis. Based on Equation (14), it can be deduced as follows:
where
kp is the coefficient;
ξ is the damping ratio of the APL; and
ωs is the natural frequency of the APL. The concrete expression of the damping ratio
ξ and natural frequency
ωs are shown as follows:
Based on classical control theory, analyzing the frequency domain index relationships of the TDC-VSG yields the expressions for phase angle margin
γ and cutoff frequency
ωc of the APL as follows:
To ensure the transient stability of the APL system in the TDC-VSG, the transient damping coefficient
DT must satisfy the phase angle margin of 30° <
γ < 70°. Using Equations (16) and (17), the feasible region for
DT is illustrated in
Figure 8. Hence, this paper adopts
γ = 57.3°,
ξ ≈ 0.707, and
DT ≈ 17.32.
5. Virtual Inertia Adaptive Control Strategy Based on TDC Algorithm
Section 3.2 highlights that
Jω must be appropriately configured to improve the system’s frequency support capability. The relationship between
Jω and frequency is demonstrated in Equations (18) and (19) as follows:
From the preceding equation, when Pref − Pout − (Dωω0 + Kωω0)(ω − ω0) remains constant, an increase in the value of Jω significantly enhances the inhibitory effect on |dω/dt|. Similarly, when Pref − Pout is held constant, larger Jω correlates with a more pronounced inhibitory effect on |ω − ω0|.
To optimize the dynamics and the transient stability of the APL system in the TVSG, the TVSG adaptive control strategy [
14] employs |d
ω/d
t| to dynamically adjust the
Jω in real time, and its specific expression is provided below:
where
J0 is the steady-state value of the virtual inertia;
Tj is the threshold of inertia determination;
KJ is the inertia compensation coefficient;
TD is the judgment threshold of the damping coefficient; and
Kd is the compensation coefficient of the damping coefficient.
5.1. Virtual Inertia Adaptive Control Strategy Based on ISRU
Nonetheless, the TVSG adaptive control strategy solely accounts for the frequency change rate of the APL system, overlooking the impact of network frequency disturbances on the system’s stability performance, and failing to address the instability issues arising from excessive
Jω compensation. Consequently, building upon the traditional VSG adaptive control strategy, this paper introduces a virtual inertia adaptive control strategy that integrates the ISRU approach rate, further enhancing the VSG control’s transient stability. The specific mathematical expression is presented as follows:
where
a is the adjustment coefficient of the ISRU function;
A(
x) is the ISRU function.
The variation trends of the ISRU function and its derivatives are illustrated in
Figure 9. As a nonlinear function capable of facilitating soft switching continuous control, the ISRU function features a changing boundary that allows
Jω to vary between
J0 +
Kj and
J0 −
Kj, thereby mitigating the instability issues associated with excessive inertia compensation coefficients. In comparison to the traditional virtual inertia compensation value
Kj[(d
ω|
ω −
ω0|)/d
t|
ω −
ω0|)], the virtual inertia adaptive control strategy incorporating the characteristics of the ISRU function, when
a = 2, is capable of suppressing frequency deviations more swiftly and enhancing the frequency recovery rate.
5.2. Parameter Settings of the TDC-VSG Adaptive Control Strategy
The result of adjusting virtual inertia
J0 is evident from the grid-connected block diagram of the TVSG presented in
Figure 3. The open-loop transfer function
TP(
s) of the APL system is shown below:
At the cutoff angular frequency
ωc of the APL, defined as
ωc = 2π
fcp, the amplitude of
TP(
s) for the TVSG equals 1, as illustrated by Equation (24):
Solving the above equation yields the following:
To satisfy the virtual inertia requirements of the TVSG, the expression under the radical sign in Equation (25) should be greater than zero as shown below:
To ensure that the system phase margin
γref > 45° and the cutoff frequency remains below 0.2 times the rated frequency [
30], the following conditions must be satisfied:
By substituting Equation (23) into Equation (27), the following is obtained:
The
J-
fcp characteristic curve and phase angle margin constraint curve are delineated in accordance with Equations (25) and (28), as illustrated in
Figure 10. Predicated on the selection area of
Jω and
fcp depicted in
Figure 10,
fcq_min = 2.30, allowing for the determination of the virtual inertia
J0, which is selected as 0.9.
The appropriate compensation coefficient
Kj and the virtual inertia switching threshold
Tj are determined to enhance the dynamics and precision of the TDC-VSG adaptive control strategy.
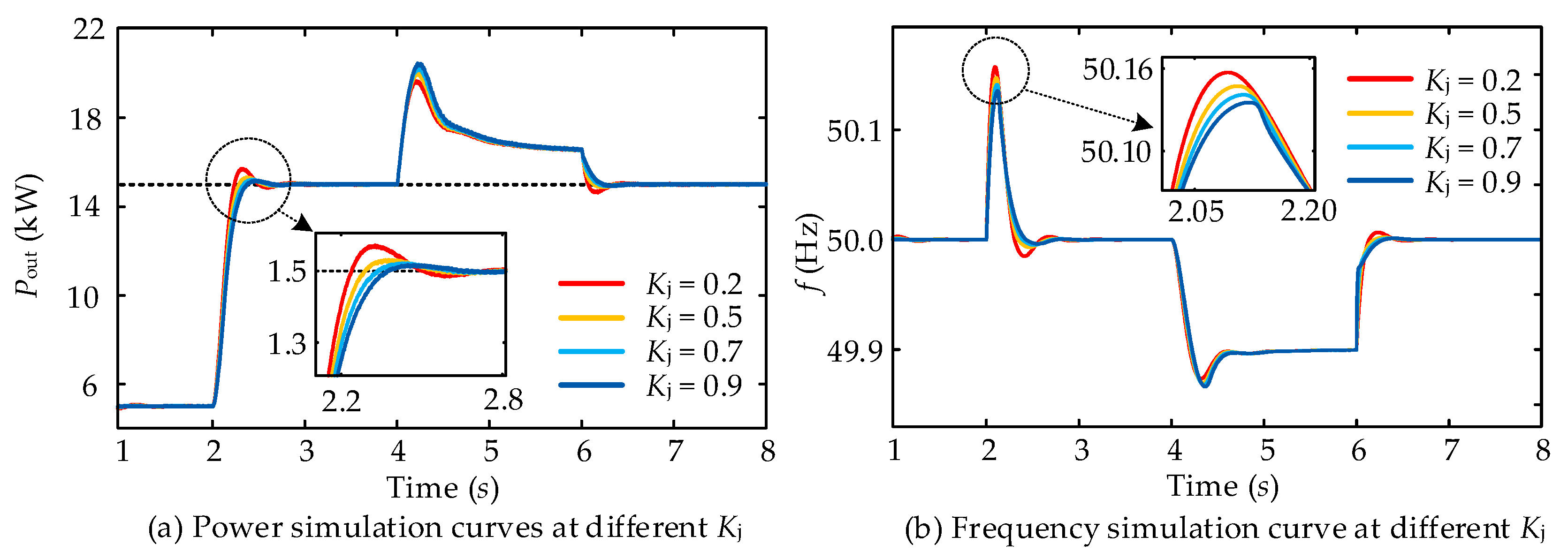
Figure 11 displays the system’s active power and frequency output characteristics under various control parameters.
The output characteristics of the system corresponding to various compensation coefficients are illustrated in
Figure 11a. When
Kj = 0.9, the control system demonstrates the most pronounced effectiveness in suppressing transient oscillations. The output characteristics of TDC-VSG under varying
Tj are depicted in
Figure 11b. As
Tj decreases, the system performs better in mitigating power and frequency oscillations. Consequently, the optimal switching threshold
Tj identified is 0.2.
7. Experimental Results and Analysis
To further prove the feasibility of the TDC-VSG adaptive control strategy, the VSG grid-connected experiments were conducted on the HIL platform and the details of the experimental platform are illustrated in
Figure 18. The VSG main circuit topology is integrated into the Field Programmable Gate Array (FPGA) of the HIL real-time simulator, while the control program is executed on the Central Processing Unit (CPU) of the HIL, with an oscilloscope employed for output waveforms. The control parameters for the hardware experiment are as follows: the steady-state damping coefficients for the TVSG control strategy are set to
Dω =
Kω = 7.6; the compensation coefficients for the traditional adaptive control are configured as
KJ = 0.2 and
Kd = 10; the compensation coefficient for the TDC-VSG adaptive control is set at
Kj = 0.9, with the steady-state damping coefficient designated as
DT = 17.32. The specific experimental conditions are set as follows: In Test Condition 1, the reference power
Pref increases from 0 kW to 15 kW at 7.5 s and subsequently decreases to 0 kW at 10 s. In Test Condition 2, the grid frequency drops from 50 Hz to 49.9 Hz.
Figure 19a,b illustrates that the experimental outcomes under given power and grid frequency variations align closely with the simulation results. When
Dω =
Kω = 7.6, significant transient oscillations occur within the TVSG control strategy, accompanied by steady-state deviations attributable to damping characteristics during grid frequency variations. The traditional adaptive control strategy significantly mitigates power and frequency oscillations under both disturbances; however, it further exacerbates the steady-state deviation during grid frequency variations. The TDC-VSG control strategy not only suppresses transient oscillations but also solves the issue of steady-state deviation resulting from damping characteristics, exhibiting a faster active response rate under both disturbances. The experimental results confirm the simulation findings, proving the feasibility of the TDC-VSG control strategy.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}