1. Introduction
The significance of container ports in international trade has grown substantially due to the increase in global container port traffic [
1]. As critical hubs in the supply chain, ports facilitate value-added operations and manage complex logistics activities [
2]. The rising volume of container handling has introduced significant planning challenges and has exacerbated congestion and operational uncertainties at terminals. Disruptions to these critical transportation systems can have profound consequences for the supply chains that depend on them. Physical damage to ports can severely impair their functioning, leading to high costs for rebuilding port infrastructure and causing long-term reputational damage. Such damage may result from adverse weather conditions, equipment breakdowns, or armed attacks. For instance, some carriers were forced to reroute cargo due to armed attacks that posed threats in the Red Sea area, leading to increased prices on Asia-to-Europe and other trade routes, extended shipping times and higher costs. Additionally, the COVID-19 pandemic is recognized as one of the most significant recent disruptions, having a considerable impact on maritime supply chains [
3]. A successful port operation must integrate efficiency, resilience, and the capacity for seamless recovery from disruptions.
Resilient ports possess the capacity to anticipate and prepare for anticipated disasters, adapt to changing conditions, endure various disruptions, and mitigate their impacts through robust internal capabilities [
4,
5,
6,
7]. A resilient port can absorb damage while maintaining a certain level of service and strategically allocate resources for rapid recovery from disasters. Clearly, the berths and quay cranes are critical components of port operations, and effective, regular maintenance of QC is essential for minimizing the risk of equipment failure, thereby reducing the likelihood of port disruptions. Even in the event of an unexpected QC shutdown, efficient planning for internal capabilities—such as berth allocation and quay crane schedule—enhances resource utilization and strengthens port resilience.
To maintain operational efficiency during maintenance interruptions, it is crucial to effectively coordinate berth allocation and quay crane scheduling activities. During transitional phases, critical equipment such as QCs and their associated components are vulnerable to normal wear and tear, and adverse conditions can exacerbate the likelihood of malfunctions. This underscores the importance of proactive maintenance measures. Regular maintenance significantly reduces the risk of breakdowns, ensuring continuity from of operations from both short-term and medium-term strategic perspectives. During maintenance periods, the designated quay where the quay crane is stationed becomes inaccessible, rendering both the crane and occupied berth segment unavailable for vessel procedures. Additionally, non-crossover constraints prevent adjacent quay cranes from serving vessels on the opposite side during maintenance activities. Consequently, careful consideration of the quay crane maintenance is essential when optimizing container handling services along the waterfront. This requires a synchronized approach that integrates berth allocation and quay crane scheduling.
Based on our observations concerning QC maintenance, we conducted a study on berths allocation and QC assignment in dynamic scenarios involving preventive QC maintenance activities with strict time constraints. The main contributions of this research are as follows: (1) We introduce the integration of QC maintenance activities, characterized by rigid time windows, into the problem of dynamic berth allocation and quay crane assignment; (2) We develop a bi-level programming model that conceptualizes QC maintenance activities as virtual vessels, subject to constraints on start and completion times, berthing segments, and assigned QCs; (3) Given the NP-hard nature of this problem, we propose an enhanced Differential Evolution Algorithm that leverages specific problem properties. Furthermore, we present extensive computational analysis to validate the effectiveness of our approach.
The remainder of this paper is organized as follows:
Section 2 reviews the relevant literature.
Section 3 introduces the problem under consideration, while
Section 4 formulates the mathematical model.
Section 5 details the improved Differential Evolution Algorithm.
Section 6 presents the numerical experiments, and
Section 7 offers the conclusions.
2. Literature Review
Over the past decades, research on integrated planning for berth allocation and quay crane scheduling has primarily focused on deterministic issues. This article provides an overview of these studies and examines the problem of integrating Berth Allocation and Quay Crane Assignment (BACAP), which involves making operational decisions regarding berthing position, berthing time, and the allocation of QCs. Park and Kim [
8] investigated this problem, presenting a Mixed-Integer Programming (MIP) model and a Lagrangian-based heuristic method to solve the BAP and QCSP simultaneously. Similarly, Correcher [
9] and Agra [
10] addressed these problems sequentially. Imai et al. [
11] integrated the specific QC assignment into BACAP, treating it as a single, compact problem. Wei [
12] explored the energy efficiency optimization of Automated Quay Crane (AQC) operation sequences with time window constraints, formulating a Mixed-Integer Linear Programming (MILP) based on a detailed decomposition of the AQC operations. Wang [
13] analyzed BACAP by considering QC interference and the increased QC capacity demand resulting from deviations from the preferred berthing position. Song [
14] developed an integrated mathematical model and solution algorithm to optimize the berth and quay crane scheduling processes. The literature on uncertainties in quayside operations remains relatively underexplored, with Moorthy et al. [
15] being among the first to address these challenges. Luo et al. [
16] examined scheduling for machines with deadline-constrained maintenance, proposing polynomial-time algorithms for various objectives. Lee et al. [
17] developed a model aimed at minimizing tardiness in parallel machine scheduling involving a single maintenance activity. Other researchers have focused on uncertainties in vessel arrivals and operations. For instance, Han et al. [
18] studied the Berth Allocation Problem (BAP) and Quay Crane Assignment Problem (QCAP), considering variability in vessel arrival and container processing times. Hendriks et al. [
19] introduced a mixed-integer linear programming model for berth planning that aimed to reduce quay crane peak loads while taking into account agreed-upon arrival windows. Similarly, Tang et al. [
20] explored berth allocation from a proactive standpoint to enhance robustness.
Despite these contributions, research on proactive strategies for planning berth and quay crane operations remains limited. Xu et al. [
21] introduced a robust Berth Allocation Problem (BAP) model that accounts for uncertain vessel arrivals and processing times by incorporating non-vessel-specific buffer times and a hybrid heuristic algorithm for solutions. In contrast, Zhen and Chang [
22] investigated berth scheduling by balancing baseline schedule costs and solution robustness, incorporating time buffers to manage uncertainties in vessel arrivals and handling times. Plousios [
23] analyzed the conflicts between port operations and quay crane maintenance. Shang et al. [
24] developed two robust optimization models aimed at effectively addressing data uncertainty. Furthermore, recent studies have proposed various methods for addressing these challenges: Xiang et al. [
25] introduced a reactive strategy under uncertainty for berth allocation and quay crane assignment, highlighting the role of flexibility in operational planning; Iris and Lam [
26] applied a recoverable robustness approach to improve resilience in weekly berth and crane planning; Iris et al. [
27] developed an integrated model using set partitioning for efficient resource allocation; and Iris et al. [
28] enhanced the model with an Adaptive Large Neighborhood Search heuristic, providing insights into advanced optimization techniques for integrated berth allocation and quay crane assignment.
While various approaches such as buffer times and redundancy have been employed to address uncertainties in the Berth Allocation Problem (BAP) and Quay Crane Scheduling Problem (QCSP), previous research has yet to simulate real-world scenarios that account for quay crane availability and breakdowns. Moreover, many studies have neglected the inclusion of hard time window constraints based on reliability, a critical factor that enhances the realism of scheduling models. Additionally, the uneven workload distribution among cranes and vessel bays often results in bottlenecks, necessitating prioritization in operations.
To address these gaps, we propose a novel scheduling approach that integrates these overlooked factors. Our study introduces a proactive-reactive method that incorporates a reliability-based model into the Swarm Optimization with Differential Evolution (SWO-DE) algorithm, enhancing quay crane scheduling by accounting for crane reliability and operational disruptions. This integrated approach aims to balance operational efficiency while mitigating the impact of crane breakdowns, offering a more realistic and robust solution to the QCSP.
3. Problem Description
The occurrence of emergencies involving quay cranes can significantly impact the execution of terminal operation plans, particularly within container terminals that are actively functioning. In cases where the disruption is brief, minor adjustments to the operational plan or optimizations of the loading and unloading activities for the affected vessel may suffice. However, if the incident duration exceeds a critical threshold, more substantial changes to the operational schedule may be required.
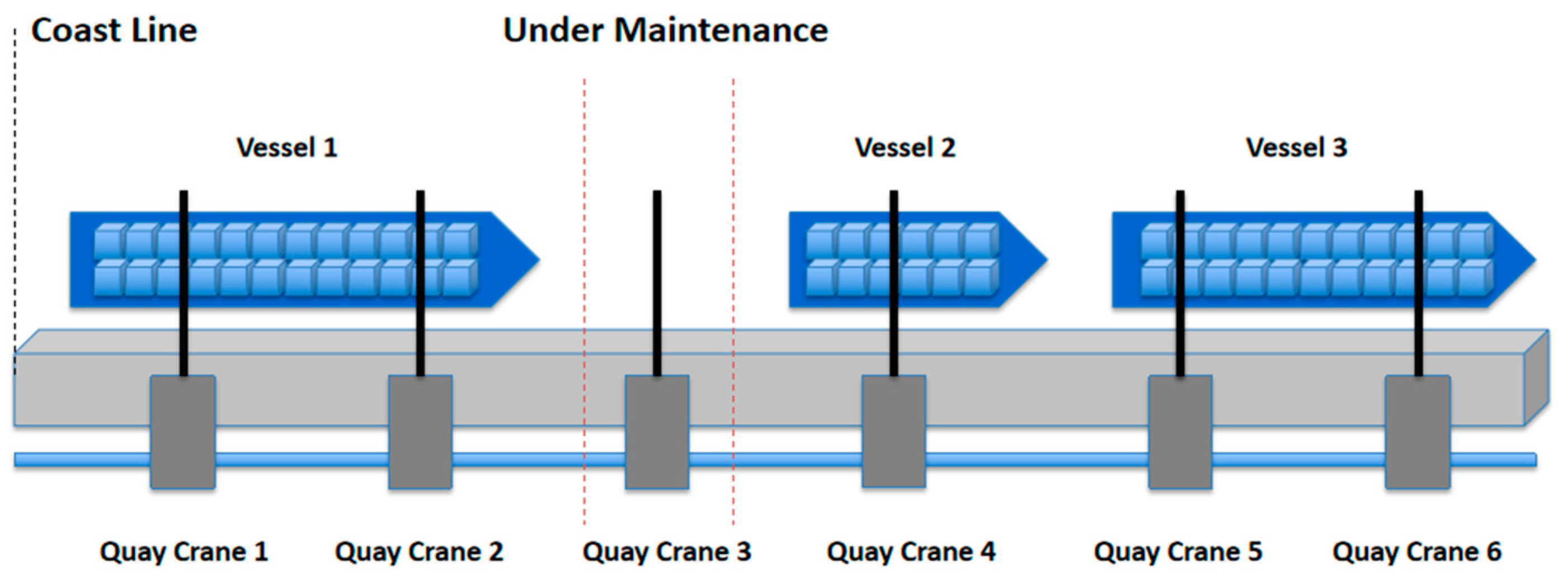
To further demonstrate the impact of quay crane (QC) maintenance activities, we consider an example involving four vessels. As shown in
Figure 1, QC3 is under maintenance, rendering both the crane and its associated berth segment unavailable for use. During this maintenance period, Vessels 1, 2, and 3 are scheduled for processing, but their service times overlap with the duration of QC3’s maintenance. As a result, Vessel 1, located to the left of QC3’s berth segment, can only be serviced by QCs 1 and 2 due to the non-crossover constraint, which prohibits QCs from crossing over the maintenance zone. On the other hand, Vessels 2 and 3, positioned to the right of QC3’s berth, must rely on QCs 4, 5, and 6 for their operations.
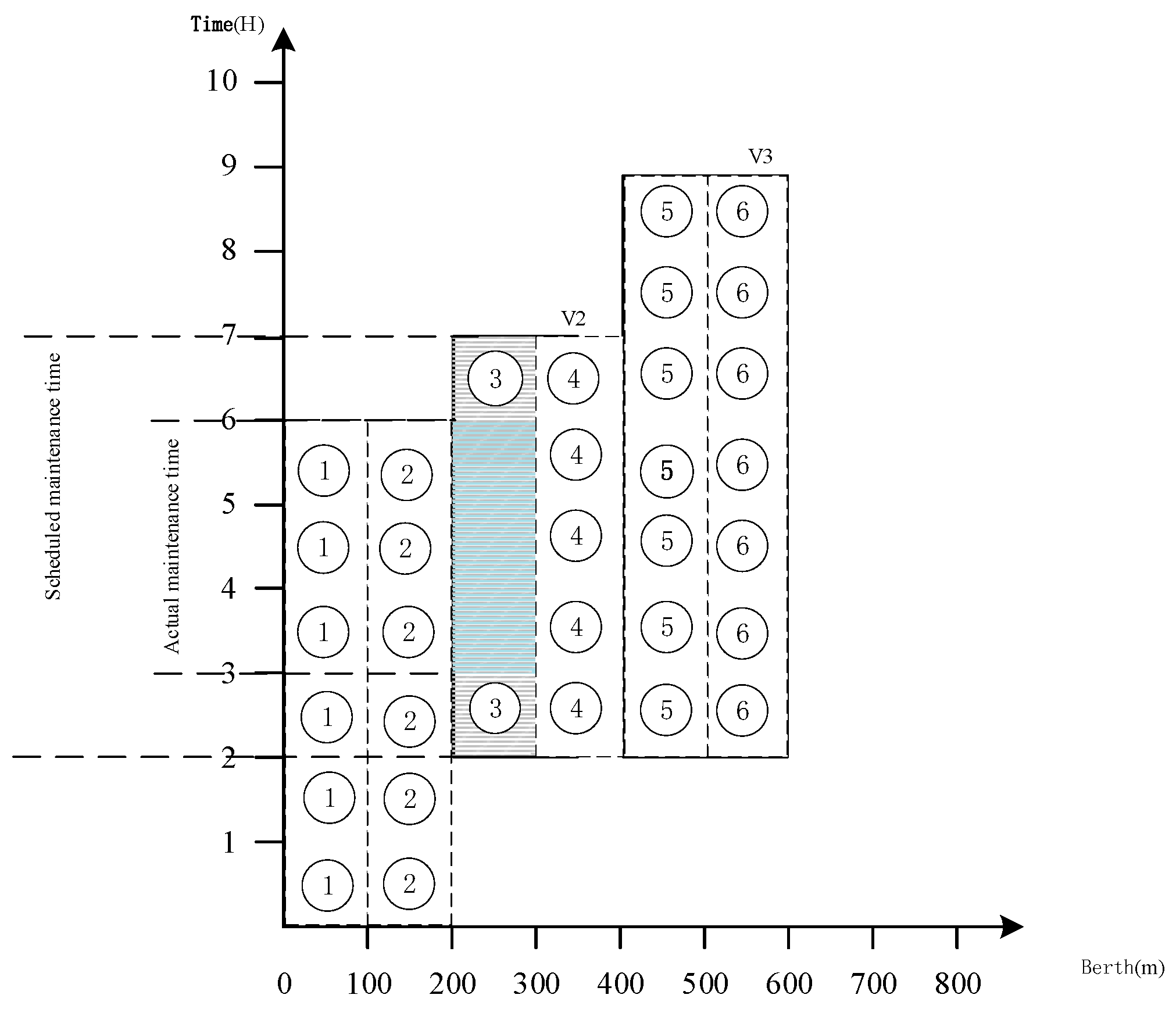
Figure 2 presents a vessel berth allocation schedule that incorporates quay crane (QC) maintenance over time. The vertical axis represents time in hours, while the horizontal axis indicates berth positions in meters. The plot is divided into two distinct zones, labeled V2 and V3, each representing different berthing areas for vessels. Notably, the blue-shaded area between hours 3 and 5 highlights the maintenance period for QC3, during which both the crane and its associated berth are unavailable. Furthermore, circles within each zone represent the quay cranes assigned to vessels at specific times and berth locations. For example, in zone V2, QC1 is assigned to service a vessel at berth position 100 m during hour 1. Thus, this diagram effectively illustrates the scheduling of quay cranes for vessel operations while accounting for the constraints posed by maintenance activities.
Problem Assumptions
The foundation of this study’s model rests on several key assumptions:
Each berth is designed to accommodate just one vessel at any given time.
Berths are considered to be continuous and universally accessible for docking, disregarding any potential physical or technical constraints like vessel draft or water depth.
The duration of vessel servicing is influenced by the specific berth to which it is assigned.
Vessels receive immediate service upon their arrival at the port.
Once initiated, vessel handling operations are carried out continuously without any breaks.
For crane scheduling, the model assumes:
- 6.
A predetermined number of cranes are necessary for servicing each vessel, and operations cannot commence until this exact crane count is available.
- 7.
Crane movement across berths is restricted; cranes cannot traverse through other berths engaged in loading or unloading activities.
4. Model Formulation
We present parameter notations and decision variables, and then propose a Mixed-integer programming for the integrated berth allocation and quay crane assignment problem with uncertain maintenance activities. The notations involved in the proposed model are listed in
Table 1.
Mixed-Integer Programming Model for the Integrated Berth Allocation, QC Assignment Problem
The model and the constraints of model for are given as follows:
The objective function seeks to minimize the total turnaround time of vessels by optimizing berth and quay crane scheduling while accounting for the impacts of crane maintenance. Equation (1) ensures that each vessel is allocated a unique berth, avoiding spatial conflicts between vessels. Equations (2) and (3) introduce spatial and temporal constraints, ensuring that no two vessels overlap in space or time. Specifically, Equation (2) dictates that if the berthing position of one vessel is to the left of another in a space-time diagram, the two cannot overlap spatially, while an earlier berthing time for one vessel ensures no temporal overlap. This guarantees distinct berthing periods and positions for vessels. Equations (4)–(6) impose further spatial constraints on berthing availability, ensuring that vessels are assigned within the physical limits of the berth and that the number of quay cranes allocated to each vessel does not exceed available capacity. Equation (7) introduces time constraints governing the start and completion of berthing operations, while Equation (8) ensures that vessel handling commences after the assigned berthing time and is completed before departure, reinforcing the sequential order of operations. Equation (9) imposes variable bounds, particularly concerning crane allocation and berthing time, to ensure feasibility of the scheduling decisions. Equation (10) guarantees that vessels assigned to the same berth maintain both spatial and temporal separation, preventing conflicts and ensuring efficient resource use. Equation (11) defines the spatial and temporal limits on crane movement, ensuring cranes do not shift excessively between berths and that vessel handling tasks are scheduled without overlap. Equation (12) limits the maximum operational time for each quay crane, preventing overuse and reducing the risk of breakdowns. Equation (13) ties vessel handling time to the number of allocated quay cranes and their efficiency, ensuring that handling time is proportional to the resources deployed. Equation (14) establishes a minimum berth utilization rate to enhance operational efficiency, ensuring that berths are used productively and not left idle. Lastly, Equation (15) dictates the minimum time interval between quay crane maintenance operations, ensuring regular servicing to maintain crane reliability and operational readiness. Together, these equations create a comprehensive framework for optimizing berth and quay crane scheduling while balancing operational constraints and minimizing disruptions from crane maintenance activities.
5. Solution Method
The SWO-DE (Swarm Optimization Differential Evolution) algorithm, based on the combination of swarm intelligence and differential evolution, is a hybrid optimization technique utilizing random search, introduced as an enhancement to traditional DE. SWO-DE integrates the advantages of swarm optimization with the adaptive properties of differential evolution, enhancing search efficiency through collective cooperation and competition among individuals. The algorithm incorporates a selection mechanism, ensuring that individuals in each generation are as competitive or superior to their predecessors, progressively optimizing the population’s average performance toward an optimal or satisfactory solution.
The first step in the SWO-DE algorithm is initializing the population. The range of the independent variable in the objective function is set to include solutions, forming the initial population. The population size is denoted by and the dimension of the feasible solution for the population is . The population of generation , obtained through continuous evolution, is initialized as , where one of the individuals is . Once the population initialization is complete, the following mutation operation is carried out.
In this step, three distinct individuals
are randomly selected from the parent population, with the condition that
. These individuals are used for mutation, where one is selected as the base vector and the other two act as the difference vectors. The new individual after mutation is calculated using the following formula:
In this equation, represents the population of generation , and the coefficient is the scaling factor, a crucial parameter for controlling the mutation process. The value of typically ranges from 0 to 2, with 0.5 often chosen as a standard value. As increases, the differences between individuals in the population of the same generation decrease more slowly, which in turn slows down the convergence rate of the entire algorithm. Conversely, a smaller leads to faster convergence. However, a scaling factor that is too small may cause the algorithm to converge prematurely, resulting in suboptimal or one-sided solutions.
After mutation, the next step is the crossover operation, where each mutated individual
undergoes crossover with the original individual
. The result of this operation, the trial vector
, is calculated as follows:
Here, is a random number in the range , and represents the crossover rate, which is also a random number within the same interval. Typically, a value of 0.3 is chosen as the optimal crossover rate. The variable represents the j-th component of the individual in generation . The condition ensures that at least one component of each individual in generation comes from the trial vector.
A flow chart outlining the DE algorithm is presented in
Figure 3. This flowchart illustrates the process of vessel berthing and Quay Crane (QC) assignment in a port. The process begins by inputting initial information about vessels, then determining if all vessels have been allocated to berthing slots. If not, berthing times and positions are calculated, adjusted as necessary, and Quay Cranes are assigned for loading and unloading. The system continuously checks if sufficient QCs are available and updates the schedule accordingly, repeating the process for the next vessel until all assignments are complete.
6. Numerical Experiments
In this section, we evaluate the effectiveness of the developed differential evolution algorithm through a series of computational experiments. The algorithm was implemented in Python 3.11 and executed on a system featuring an Intel Core i9-13900HX 2.20 GHz processor and 16 GB of memory.
The study focuses on analyzing quay crane (QC) maintenance sensitivity by simulating small-scale and large-scale scenarios for berth and crane allocation. The primary objective was to assess the impact of QC maintenance on overall operational efficiency, specifically targeting resource utilization and scheduling flexibility. To address this, two experimental setups were implemented.
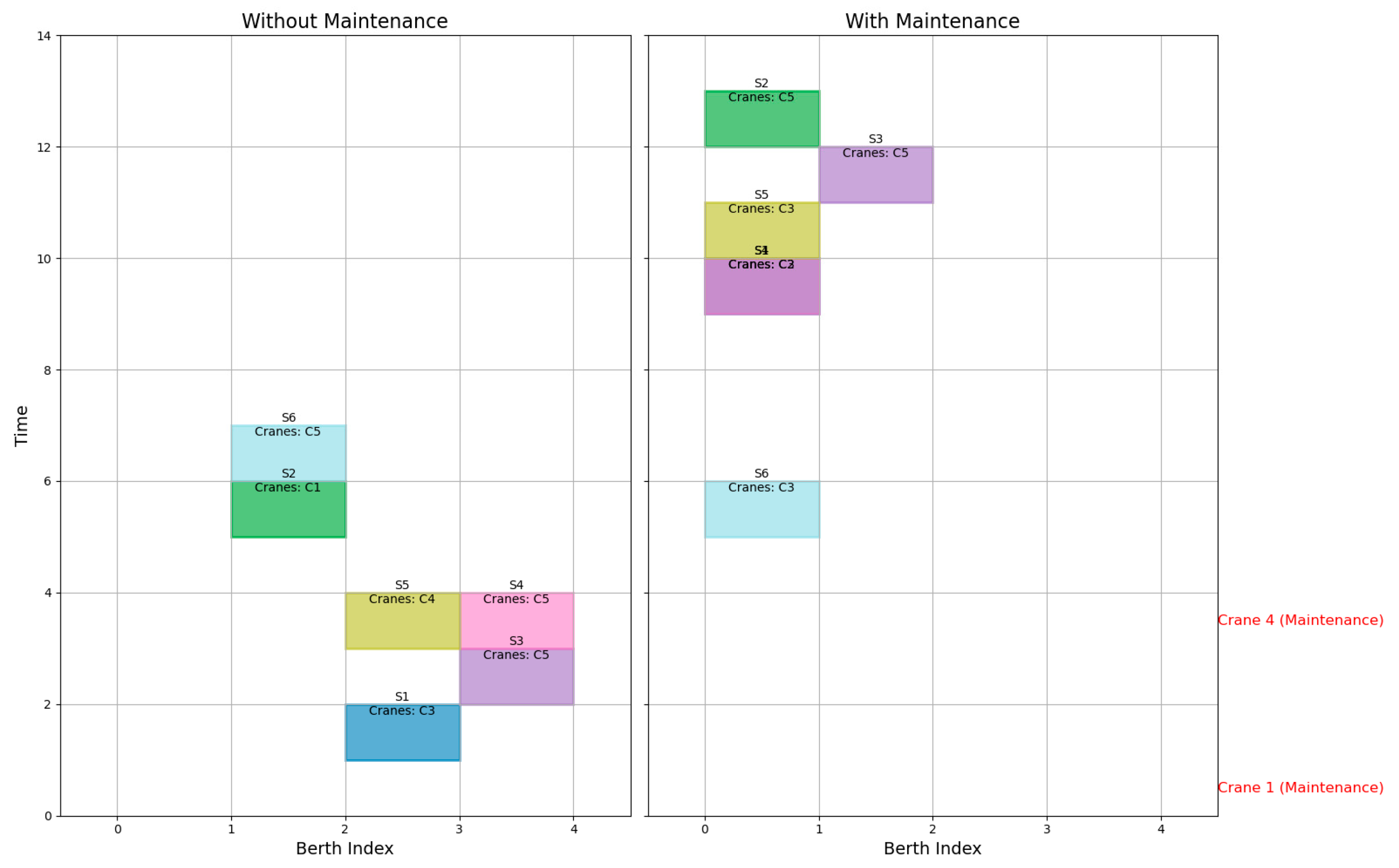
In the small-scale experiment, we examined a scenario involving 6 vessels, 4 berths, and 5 QCs. The arrival times of vessels were randomly generated to simulate real-world variability, and a predefined maintenance plan was applied, with Cranes 1 and 4 scheduled for maintenance. The maintenance durations were randomly assigned to introduce uncertainty into the schedule. The allocation of cranes to vessels was visualized under two conditions: one where all cranes were fully operational and another where crane availability was constrained due to maintenance. These visualizations revealed shifts in scheduling and highlighted potential delays in vessel processing due to maintenance-induced interruptions (
Figure 4).
For the large-scale experiment, the model was expanded to 20 vessels, 10 berths, and 10 QCs. Similar to the small-scale scenario, vessel arrival times were randomly generated, but the maintenance plan was more complex, involving multiple cranes being unavailable at different times. This larger-scale scenario provided valuable insights into how increased operational loads and crane unavailability affected resource allocation and scheduling. The results underscored the greater complexity in managing larger instances, where crane unavailability led to more significant delays and required increased flexibility in resource management (
Figure 5).
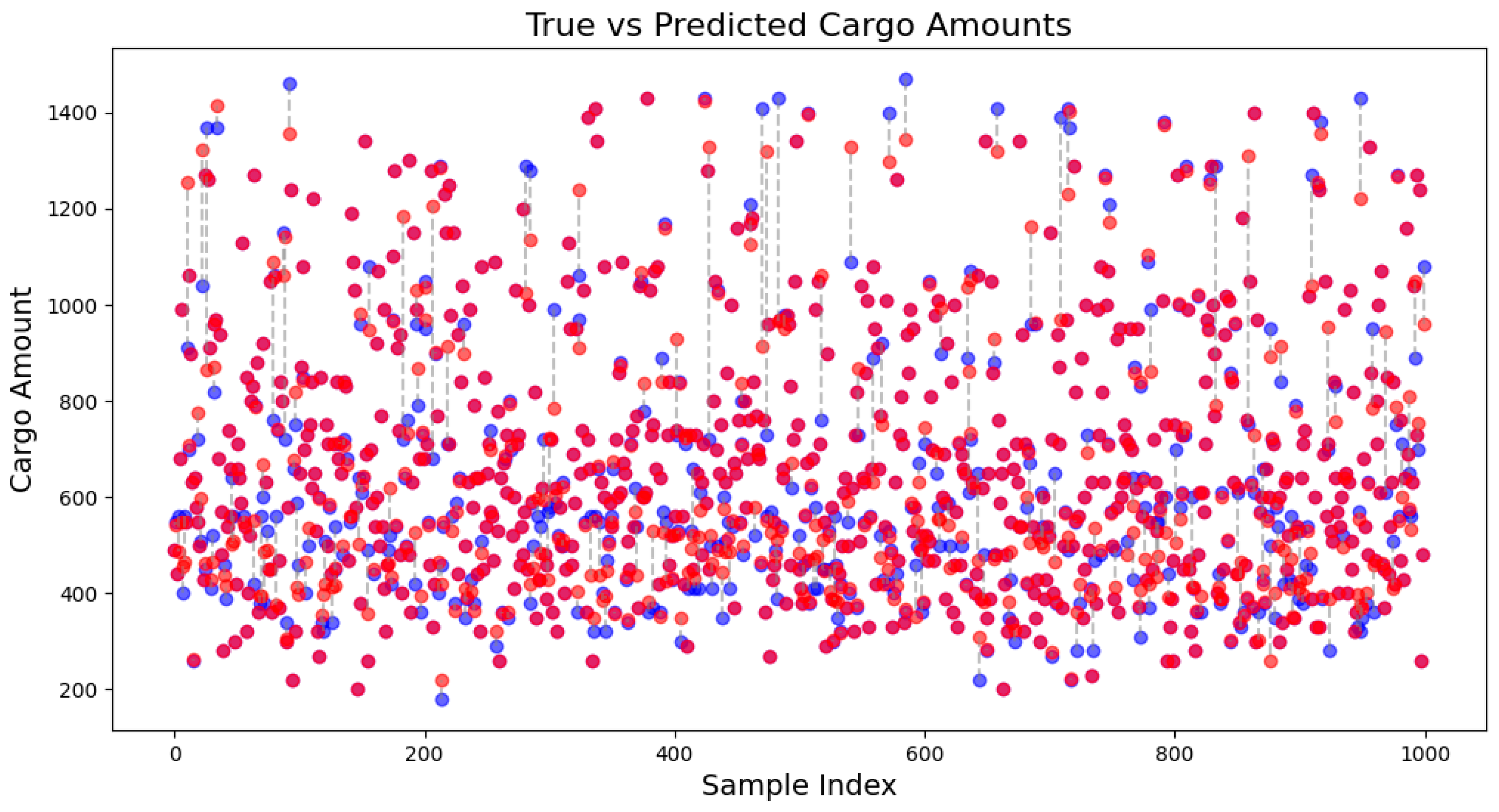
In addition, a machine learning model was developed using Random Forest regression to predict cargo handling amounts based on vessel characteristics and crane usage data. The model was trained and evaluated using real data, with its performance measured by the mean squared error (MSE).
Figure 6 illustrates a comparison between true and predicted cargo amounts. While the model performed well in predicting larger cargo amounts, some dispersion was observed for smaller loads, indicating slightly reduced accuracy in this range. Nevertheless, the model’s overall performance remained robust, and its predictive capability was successfully incorporated into berth and crane scheduling strategies, improving operational planning and resource allocation.
Additionally, the optimization scheme classified vessels based on their cargo-handling requirements, ensuring that cranes undergoing maintenance were allocated to vessels with fewer tasks and smaller sizes. This approach promoted a more consistent and efficient crane allocation, reducing reliance on traditional experience-based methods. By minimizing the impact of crane maintenance on the scheduling of berth and QC assignments, the flexibility and efficiency of the overall scheduling plan were significantly improved.
The results showed that maintenance activities led to a 34.8% increase in the objective value, demonstrating the substantial effect of crane maintenance on vessel turnaround times. Moreover, variations in input data, such as the timing of maintenance activities, resulted in schedules with different objective values. These findings emphasize the need for effective planning and execution of QC maintenance activities to ensure optimal berth and crane operations. Properly timed maintenance activities, combined with flexibility in vessel processing schedules, contribute to improved solutions and reduced operational costs (
Table 2).
Figure 7 illustrates the decrease in loss over iterations, showing a rapid reduction at the start, followed by a slower decline as the model approaches convergence. The loss stabilizes toward the end, indicating that the model has effectively learned and reached an optimal state. This pattern suggests a well-optimized training process, with diminishing returns from additional iterations. The results confirm that the model has achieved a low and stable loss, reflecting successful training.
Sensitivity Analysis
Furthermore, a sensitivity analysis was conducted to explore how varying key operational parameters impacted system performance. Parameters such as the number of vessels, berths, QCs, and maintenance duration, as well as the handling capacity of cranes, were adjusted. For each adjustment, the effect on the objective function comprising total costs, waiting times, crane movements, and overlap penalties was evaluated. The analysis revealed that increasing vessel numbers or extending maintenance duration led to higher costs and longer completion times, providing valuable insights into the key factors influencing scheduling outcomes.
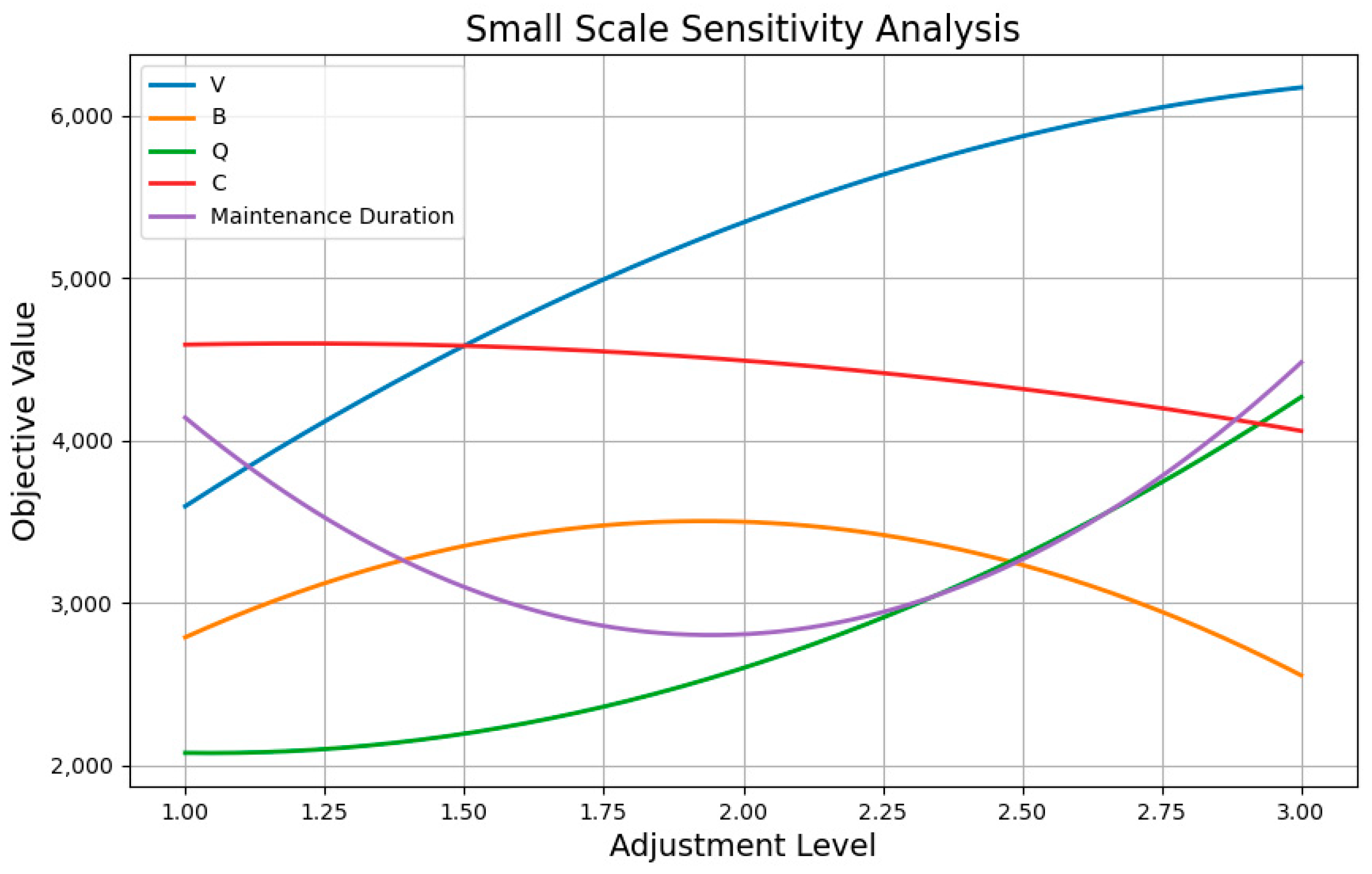
Specifically, we examined the impact of varying fault locations and the preferred berth segments of vessels on rescheduling strategies. A consistent relative fault degree for quay cranes was assumed across vessels of varying sizes. Additionally, sensitivity analysis was performed to assess the effect of different QC fault locations on the rescheduling process. For each vessel, five distinct fault scenarios were generated based on different fault locations, and five experiments were conducted to calculate average values, as depicted in
Figure 8.
In the Small Scale Sensitivity Analysis (
Figure 8), distinct trends emerge regarding the influence of different parameters on the objective value as the adjustment level changes. The most significant factor is the number of vessels, where an increase leads to a sharp rise in the objective value, reflecting the higher scheduling complexity and costs associated with handling a larger fleet. Conversely, the number of berths demonstrates an inverse relationship with the objective value, as more berths lead to greater operational efficiency and reduced costs. The number of quay cranes and the maintenance duration show more subtle effects. While an initial increase in quay cranes raises the objective value, the effect stabilizes at higher levels, suggesting diminishing returns once a certain crane capacity is reached. Maintenance duration exerts only a minor influence, indicating that its impact is secondary to other operational factors in this small-scale setting.
Figure 9 provides the results of the Large Scale Sensitivity Analysis, where similar trends are observed, though with notable differences in magnitude and patterns of influence. The number of vessels remains a critical driver of the objective value. However, in this larger-scale context, the number of quay cranes takes on an even more prominent role. At higher adjustment levels, increasing the number of quay cranes results in a significant rise in the objective value, emphasizing the importance of efficient crane management in larger, more complex operations. While the number of berths still contributes to reducing the objective value, its effect is less pronounced compared to the small-scale case, likely due to diminishing returns as system size grows. Maintenance duration continues to have a relatively minor impact, with its influence remaining stable across adjustments.
These findings underscore that, in large-scale scheduling problems, both the number of vessels and the allocation of quay cranes are primary cost drivers. In contrast, the availability of berths, while still beneficial, plays a diminishing role as operational complexity increases. Effective crane management becomes critical in larger port operations to avoid significant cost escalations.
In conclusion, the sensitivity analysis demonstrates that the number of vessels and quay cranes are crucial determinants of scheduling efficiency and overall costs. As the scale of the problem increases, the relative importance of these factors shifts, with crane management becoming increasingly dominant. Although berth availability helps lower costs, its influence weakens in larger-scale scenarios, stressing the need for strategies that prioritize the efficient utilization of cranes and vessel handling. These insights provide practical guidance for port operators in optimizing resource allocation, especially in high-traffic, large-scale environments, where balancing operational efficiency and resource constraints is critical to minimizing delays and associated costs.
7. Conclusions
This study investigates a novel BACASP model, which integrates preventive maintenance activities tailored for certain QCs. The research focuses on a time-varying scenario, where the composition of QCs allocated to a vessel may vary across different operational stages. A noteworthy contribution lies in the integration of QC preventive maintenance activities into the BACASP problem. To tackle this, a bi-level programming model is proposed alongside DE algorithms as solution methodologies. The models and heuristic search algorithm elucidated in this study significantly advance the realm of efficient resource management within container terminals, catering to practical applications.
Moreover, the rescheduling process outlined in the study assesses schedule feasibility via simulation, thereby markedly augmenting decision-making capabilities. The research augments the quantification model of port resilience and furnishes actionable recommendations for decision-making and planning aimed at bolstering the resilience of port systems through the implementation of pertinent strategies. Although the study primarily focuses on weekly berth and quay crane planning, it underscores the importance of accounting for potential parameter uncertainties when extending the planning horizon. Consequently, future research could expand our disaster database with additional disasters and disaster-related parameters to better identify the factors that drive the duration of port disruptions and the resilience of ports. We should investigate rescheduling strategies for quay cranes with specific setups and yard truck rescheduling as recovery methods. This approach will effectively assist planners in adapting to real-time changes.
Author Contributions
S.L.: Conceptualization, Methodology, Software, Validation, Formal analysis, Investigation, Resources, Data curation, Writing—original draft preparation, and Visualization; L.S.: Writing—review and editing, Supervision, Project administration, and Funding acquisition. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Transport Organization of Key Cargo Types in River-Sea Intermodal Transport (Grant No. Guangxi Technology AA23062021-2) and Transport Plan Preparation and Adjustment Optimization Based on Freight Demand Fulfillment (Grant No. K2023X024). The APC was funded by Guangxi Beibu Gulf International Port Group Co., Ltd., and China State Railway Group Co., Ltd.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
This study did not involve humans, and therefore, the statement regarding informed consent is not applicable.
Data Availability Statement
Restrictions apply to the availability of these data. The data were obtained from Guangxi Beibu Gulf International Port Group Co., Ltd., and are available with the permission of Guangxi Beibu Gulf International Port Group Co., Ltd. The restrictions are in place due to confidentiality agreements and proprietary rights.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Verschuur, J.; Koks, E.E.; Hall, J.W. Port disruptions due to natural disasters: Insights into port and logistics resilience. Transp. Res. Part D Transp. Environ. 2020, 85, 102393. [Google Scholar] [CrossRef]
- Liu, D.; Ge, Y. Modeling assignment of quay cranes using queueing theory for minimizing CO2 emission at a container terminal. Transp. Res. Part D Transp. Environ. 2018, 61, 140–151. [Google Scholar] [CrossRef]
- Lam, J.S.L.; Liu, C.; Gou, X. Cyclone risk mapping for critical coastal infrastructure: Cases of East Asian seaports. Ocean Coast. Manag. 2017, 141, 43–54. [Google Scholar] [CrossRef]
- Zhou, C.; Zhu, S.; Bell, M.G.H. Emerging technology and management research in the container terminals: Trends and the COVID-19 pandemic impacts. Ocean Coast. Manag. 2022, 230, 106318. [Google Scholar] [CrossRef] [PubMed]
- Fan, H.; Gong, X.; Lyu, J. Resilience assessment of strait/canal: A rule-based Bayesian network framework. Transp. Res. Part D Transp. Environ. 2023, 124, 103960. [Google Scholar] [CrossRef]
- Narasimha, P.T.; Jena, P.R.; Majhi, R. Impact of COVID-19 on the Indian seaport transportation and maritime supply chain. Transp. Policy 2021, 110, 191–203. [Google Scholar] [CrossRef]
- Elmi, Z.; Singh, P.; Meriga, V.K.; Goniewicz, K.; Borowska-Stefańska, M.; Wiśniewski, S.; Dulebenets, M.A. Uncertainties in Liner Shipping and Ship Schedule Recovery: A State-of-the-Art Review. Mar. Sci. Eng. 2022, 10, 563. [Google Scholar] [CrossRef]
- Park, Y.M.; Kim, K.H. A scheduling method for Berth and Quay cranes. OR Spectr. 2003, 25, 1–23. [Google Scholar] [CrossRef]
- Correcher, J.F.; Alvarez-Valdes, R.; Tamarit, J.M. New exact methods for the time-invariant berth allocation and quay crane assignment problem. Eur. J. Oper. Res. 2019, 275, 80–92. [Google Scholar] [CrossRef]
- Agra, A.; Oliveira, M. MIP approaches for the integrated berth allocation and quay crane assignment and scheduling problem. Eur. J. Oper. Res. 2018, 264, 138–148. [Google Scholar] [CrossRef]
- Imai, A.; Chen, H.C.; Nishimura, E.; Papadimitriou, S. The simultaneous berth and quay crane allocation problem. Transp. Res. Part E Logist. Transp. Rev. 2008, 44, 900–920. [Google Scholar] [CrossRef]
- Wei, M.; He, J.; Tan, C. Quay crane scheduling with time windows constraints for automated container port. Ocean Coast. Manag. 2023, 231, 106401. [Google Scholar] [CrossRef]
- Wang, T.; Wang, X.; Meng, Q. Joint berth allocation and quay crane assignment under different carbon taxation policies. Transp. Res. Part B Methodol. 2018, 117, 18–36. [Google Scholar] [CrossRef]
- Song, L.; Cherrett, T.; Guan, W. Study on berth planning problem in a container seaport: Using an integrated programming approach. Comput. Ind. Eng. 2011, 62, 119–128. [Google Scholar] [CrossRef]
- Moorthy, R.; Teo, C. Berth management in container terminal: The template design problem. OR Spectr. 2006, 28, 495–518. [Google Scholar] [CrossRef]
- Luo, W.; Cheng, T.C.E.; Ji, M. Single-machine scheduling with a variable maintenance activity. Comput. Ind. Eng. 2015, 79, 168–174. [Google Scholar] [CrossRef]
- Lee, W.; Wang, J.; Lee, L. A hybrid genetic algorithm for an identical parallel-machine problem with maintenance activity. J. Oper. Res. Soc. 2015, 66, 1906–1918. [Google Scholar] [CrossRef]
- Han, X.; Lu, Z.; Xi, L. A proactive approach for simultaneous berth and quay crane scheduling problem with stochastic arrival and handling time. Eur. J. Oper. Res. 2010, 207, 1327–1340. [Google Scholar] [CrossRef]
- Hendriks, M.; Laumanns, M.; Lefeber, E. Robust cyclic berth planning of container vessels. OR Spectr. 2010, 32, 501–517. [Google Scholar] [CrossRef]
- Tang, S.; Jin, J.G.; Lu, C. Investigation of berth allocation problem in container ports considering the variety of disruption. Comput. Ind. Eng. 2022, 172, 108564. [Google Scholar] [CrossRef]
- Xu, Y.; Chen, Q.; Quan, X. Robust berth scheduling with uncertain vessel delay and handling time. Ann. Oper. Res. 2012, 192, 123–140. [Google Scholar] [CrossRef]
- Zhen, L.; Chang, D. A bi-objective model for robust berth allocation scheduling. Comput. Ind. Eng. 2012, 63, 262–273. [Google Scholar] [CrossRef]
- Plousios, A. Maintenance and Spare Parts Inventory Optimization at Container Terminals: The Case of ECT; Erasmus University Rotterdam: Rotterdam, The Netherlands, 2009. [Google Scholar]
- Shang, X.T.; Cao, J.X.; Ren, J. A robust optimization approach to the integrated berth allocation and quay crane assignment problem. Transp. Res. Part E Logist. Transp. Rev. 2016, 94, 44–65. [Google Scholar] [CrossRef]
- Xiang, X.; Liu, C.; Miao, L. Reactive strategy for discrete berth allocation and quay crane assignment problems under uncertainty. Comput. Ind. Eng. 2018, 126, 196–216. [Google Scholar] [CrossRef]
- Iris, Ç.; Lam, J.S.L. Recoverable robustness in weekly berth and quay crane planning. Transp. Res. Part B Methodol. 2019, 122, 365–389. [Google Scholar] [CrossRef]
- Iris, Ç.; Pacino, D.; Ropke, S.; Larsen, A. Integrated Berth Allocation and Quay Crane Assignment Problem: Set partitioning models and computational results. Transp. Res. Part E Logist. Transp. Rev. 2015, 81, 75–97. [Google Scholar] [CrossRef]
- Iris, Ç.; Pacino, D.; Ropke, S. Improved formulations and an Adaptive Large Neighborhood Search heuristic for the integrated berth allocation and quay crane assignment problem. Transp. Res. Part E Logist. Transp. Rev. 2017, 105, 123–147. [Google Scholar] [CrossRef]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}