C Band 360° Triangular Phase Shift Detector for Precise Vertical Landing RF System

 , ,
, ,  and
and
Abstract
1. Introduction
2. ±90° Versus ±180° Landing System
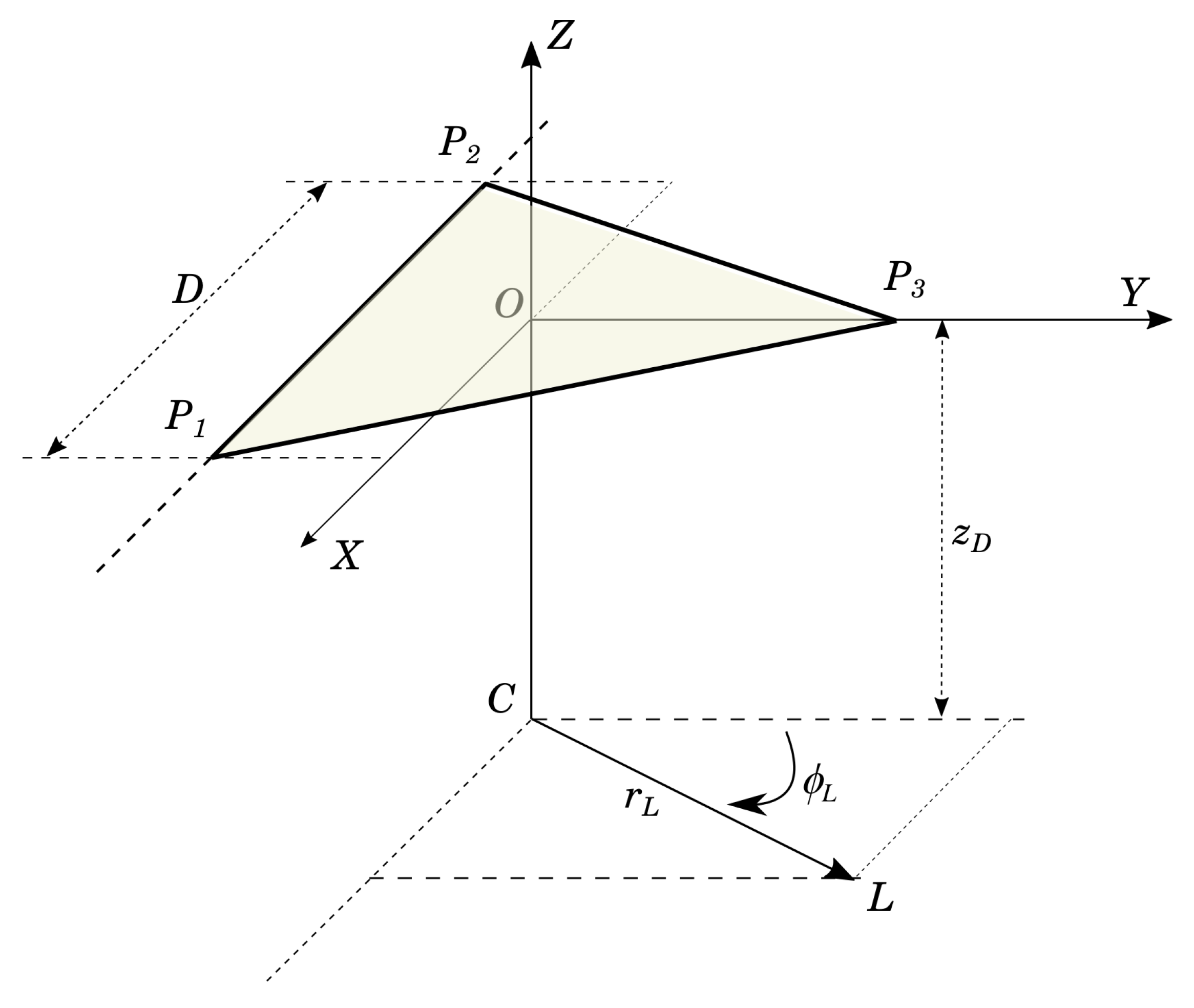
2.1. Basic Theory of Triangular Phase Shift Detector and Tracking Volume
2.2. Triangular Phase Shift Landing System with Analog Multipliers
2.3. Extending Phase Shift to ±180°
3. Circuit Design
3.1. Theoretical Design
3.2. Circuit Adjustments
3.3. Experimental Characterization
4. Landing Algorithm and Evaluation
5. Discussions
6. Conclusions
- The design has been realized with a double multiplication phase detector, in phase and phase-shifted, which facilitates the design because it allows an unbalancing of the different branches without loss of detection range. The increase in the phase detection range up to ±180° transforms into a directly proportional increase in the tracking area. An analysis of the tracking volumes (inverted cones) has been performed comparing different frequencies, distances between RF inputs, and phase detection ranges (±180° and ±90°).
- The results with ±180° show the possibility of increasing the working frequency and reducing the size of the antennas, while maintaining the tracking area of systems operating at ±90°. Compared to previous designs that have used this technique, an AGC has been included that substantially simplifies the calibration and modeling of the curves of this type of detector and, therefore, the algorithm to determine the phase shift from the voltages measured at the output of the multiplier. This makes possible its integration in a simple control circuit board or as part of the flight control system.
- A simple program is proposed that implements the guidance instructions from the calculated phase shifts, which could be integrated into the same flight control platform, thus avoiding the need to add additional processing and memory components.
- A prototype has been manufactured with commercial circuits and microstrip technology that operates in the C frequency band, avoiding the crossing of lines by means of switches. In this work, the calibration and characterization process has been performed at 5.3 GHz. The measurements show a dynamic range of more than 50 dB and an unambiguous detection range of ±177°, taking into account the uncertainty produced by the phase error of ±3°. The tracking area shows a considerable increase with respect to previous developments that have a theoretical phase shift of ±90°. As shown, it changes from an area of approximately 1 m radius to 3.3 m radius when the inputs are at D = 7 cm, the frequency is 2.5 GHz, and the drone is at 2 m height (Figure 4).
- Finally, a simulation program has been developed to visualize the drone trajectories and phase evolution. Different situations have been analyzed in which the drone stays inside the tracking zone (phase shifts lower than ±180°) and achieves a successful landing or goes out of it (phase shifts higher than ±180°) and lands at any wrong location.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Woo, C.; Kang, S.; Ko, H.; Song, H.; Kwon, J.O. Auto charging platform and algorithms for long-distance flight of drones. In Proceedings of the 2017 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 8–10 January 2017; pp. 186–187. [Google Scholar] [CrossRef]
- Basha, E.; Eiskamp, M.; Johnson, J.; Detweiler, C. UAV Recharging Opportunities and Policies for Sensor Networks. Int. J. Distrib. Sens. Netw. 2015, 11, 824260. [Google Scholar] [CrossRef]
- Gautam, A.; Sujit, P.B.; Saripalli, S. A survey of autonomous landing techniques for UAVs. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014; pp. 1210–1218. [Google Scholar] [CrossRef]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned Aerial Vehicles (UAVs): A Survey on Civil Applications and Key Research Challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Patruno, C.; Nitti, M.; Petitti, A.; Stella, E.; D’Orazio, T. A Vision-Based Approach for Unmanned Aerial Vehicle Landing. J. Intell. Robot. Syst. 2019, 95, 645–664. [Google Scholar] [CrossRef]
- Pluckter, K.; Scherer, S. Precision UAV Landing in Unstructured Environments. In Proceedings of the International Symposium on Experimental Robotics; Springer: Berlin/Heidelberg, Germany, 2018; pp. 177–187. [Google Scholar]
- Salagame, A.; Govindraj, S.; Omkar, S. Precision Landing of a UAV on a Moving Platform for Outdoor Applications. arXiv 2022, arXiv:2209.14436. [Google Scholar] [CrossRef]
- Janousek, J.; Marcon, P. Precision landing options in unmanned aerial vehicles. In Proceedings of the 2018 International Interdisciplinary PhD Workshop (IIPhDW), Świnoujście, Poland, 9–12 May 2018; IEEE: Piscataway, NJ, USA; pp. 58–60. [Google Scholar]
- Badakis, G.; Koutsoubelias, M.; Lalis, S. Robust precision landing for autonomous drones combining vision-based and infrared sensors. In Proceedings of the 2021 IEEE Sensors Applications Symposium (SAS), Sundsvall, Sweden, 23–25 August 2021; IEEE: Piscataway, NJ, USA; pp. 1–6. [Google Scholar]
- Mu, L.; Li, Q.; Wang, B.; Zhang, Y.; Feng, N.; Xue, X.; Sun, W. A vision-based autonomous landing guidance strategy for a micro-UAV by the modified camera view. Drones 2023, 7, 400. [Google Scholar] [CrossRef]
- Liu, X.; Xue, W.; Xu, X.; Zhao, M.; Qin, B. Research on unmanned aerial vehicle (UAV) visual landing guidance and positioning algorithms. Drones 2024, 8, 257. [Google Scholar] [CrossRef]
- García-Pulido, J.A.; Pajares, G.; Dormido, S. UAV landing platform recognition using cognitive computation combining geometric analysis and computer vision techniques. Cogn. Comput. 2023, 15, 392–412. [Google Scholar] [CrossRef]
- Moreira, M.; Azevedo, F.; Ferreira, A.; Pedro, D.; Matos-Carvalho, J.; Ramos, Á.; Loureiro, R.; Campos, L. Precision Landing for Low-Maintenance Remote Operations with UAVs. Drones 2021, 5, 103. [Google Scholar] [CrossRef]
- Supej, M.; Čuk, I. Comparison of Global Navigation Satellite System Devices on Speed Tracking in Road (Tran)SPORT Applications. Sensors 2014, 14, 23490–23508. [Google Scholar] [CrossRef] [PubMed]
- Koo, G.; Kim, K.; Chung, J.Y.; Choi, J.; Kwon, N.Y.; Kang, D.Y.; Sohn, H. Development of a high precision displacement measurement system by fusing a low cost RTK-GPS sensor and a force feedback accelerometer for infrastructure monitoring. Sensors 2017, 17, 2745. [Google Scholar] [CrossRef] [PubMed]
- Meng, Y.S.; Lee, Y.H.; Ng, B.C. Study of Propagation Loss Prediction in Forest Environment. Prog. Electromagn. Res. B 2009, 17, 117–133. [Google Scholar] [CrossRef]
- Dyukov, A. Mask Angle Effects on GNSS Speed Validity in Multipath and Tree Foliage Environments. Asian J. Appl. Sci. 2016, 4, 309–321. [Google Scholar]
- Tiemann, J.; Schweikowski, F.; Wietfeld, C. Design of an UWB indoor-positioning system for UAV navigation in GNSS-denied environments. In Proceedings of the 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2015; IEEE: Piscataway, NJ, USA; pp. 1–7. [Google Scholar]
- Benini, A.; Mancini, A.; Longhi, S. An IMU/UWB/vision-based extended kalman filter for mini-UAV localization in indoor environment using 802.15.4a wireless sensor network. J. Intell. Robot. Syst. 2013, 70, 461–476. [Google Scholar] [CrossRef]
- Queralta, J.P.; Almansa, C.M.; Schiano, F.; Floreano, D.; Westerlund, T. UWB-based system for UAV localization in GNSS-denied environments: Characterization and dataset. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; IEEE: Piscataway, NJ, USA; pp. 4521–4528. [Google Scholar]
- Zeng, Q.; Jin, Y.; Yu, H.; You, X. A UAV localization system based on double UWB tags and IMU for landing platform. IEEE Sens. J. 2023, 23, 10100–10108. [Google Scholar] [CrossRef]
- Ochoa-de Eribe-Landaberea, A.; Zamora-Cadenas, L.; Peñagaricano-Muñoa, O.; Velez, I. UWB and IMU-based UAV’s assistance system for autonomous landing on a platform. Sensors 2022, 22, 2347. [Google Scholar] [CrossRef] [PubMed]
- Kownacki, C.; Ambroziak, L.; Ciezkowski, M.; Wolniakowski, A.; Romaniuk, S.; Bozko, A.; Oldziej, D. Precision landing tests of tethered multicopter and VTOL UAV on moving landing pad on a lake. Sensors 2023, 23, 2016. [Google Scholar] [CrossRef] [PubMed]
- Guo, K.; Qiu, Z.; Miao, C.; Zaini, A.H.; Chen, C.L.; Meng, W.; Xie, L. Ultra-wideband-based localization for quadcopter navigation. Unmanned Syst. 2016, 4, 23–34. [Google Scholar] [CrossRef]
- Araña-Pulido, V.; Jiménez-Yguácel, E.; Cabrera-Almeida, F.; Quintana-Morales, P. Triangular Phase Shift Detector for Drone Precise Vertical Landing RF Systems. IEEE Trans. Instrum. Meas. 2021, 70, 8501808. [Google Scholar] [CrossRef]
- Lo, T.Y.; Chang, J.Y.; Wei, T.Z.; Chen, P.Y.; Huang, S.P.; Tsai, W.T.; Liou, C.Y.; Lin, C.C.; Mao, S.G. GPS-free wireless precise positioning system for automatic flying and landing application of shipborne unmanned aerial vehicle. Sensors 2024, 24, 550. [Google Scholar] [CrossRef] [PubMed]
- Araña-Pulido, V.; Jiménez-Yguácel, E.; Cabrera-Almeida, F.; Quintana-Morales, P. Antenna system for trilateral drone precise vertical landing. IEEE Trans. Instrum. Meas. 2022, 71, 3000508. [Google Scholar] [CrossRef]
- Sathaye, H.; Schepers, D.; Ranganathan, A.; Noubir, G. Wireless attacks on aircraft instrument landing systems. In Proceedings of the 28th USENIX Security Symposium (USENIX Security 19), Miami, FL, USA, 15–17 May 2019; pp. 357–372. [Google Scholar]
- Rezaeian, A.; Ardeshir, G.; Gholami, M. A low-power and high-frequency phase frequency detector for a 3.33-GHz delay locked loop. Circuits Syst. Signal Process. 2020, 39, 1735–1750. [Google Scholar] [CrossRef]
- Microsemi. 8 GHz Phase Frequency Detector IC with Dual 40 GHz Prescalers. Available online: http://www.microsemi.com (accessed on 21 July 2025).
- Sofimowloodi, S.; Razaghian, F.; Gholami, M. Low-power high-frequency phase frequency detector for minimal blind-zone phase-locked loops. Circuits Syst. Signal Process. 2019, 38, 498–511. [Google Scholar] [CrossRef]
- Zhang, M.; Wang, H.; Qin, H.; Zhao, W.; Liu, Y. Phase Difference Measurement Method Based on Progressive Phase Shift. Electronics 2018, 7, 86. [Google Scholar] [CrossRef]
- Vandenbussche, J.; Lee, P.; Peuteman, J. On the Accuracy of Digital Phase Sensitive Detectors Implemented in FPGA Technology. IEEE Trans. Instrum. Meas. 2014, 63, 1926–1936. [Google Scholar] [CrossRef]
- Bertotti, F.L.; Hara, M.S.; Abatti, P.J. A simple method to measure phase difference between sinusoidal signals. Rev. Sci. Instruments 2010, 81, 115106. [Google Scholar] [CrossRef] [PubMed]
- Han, J.; Ding, D. Design and Analysis of a Hybrid-Type RF MEMS Phase Detector in X-Band. Micromachines 2022, 13, 786. [Google Scholar] [CrossRef] [PubMed]
- Widarta, A. Null Technique for Precision RF Phase Shift Measurements. IEEE Trans. Instrum. Meas. 2019, 68, 1840–1843. [Google Scholar] [CrossRef]
- Mlynek, A.; Faugel, H.; Eixenberger, H.; Pautasso, G.; Sellmair, G. A simple and versatile phase detector for heterodyne interferometers. Rev. Sci. Instruments 2017, 88, 023504. [Google Scholar] [CrossRef] [PubMed]
- Verhaevert, J.; Van Torre, P. A low-cost vector network analyzer: Design and realization. In Proceedings of the Loughborough Antennas & Propagation Conference (LAPC 2017), Loughborough, UK, 13–14 November 2017; pp. 1–5. [Google Scholar] [CrossRef]
- ADMV1014. 24 GHz to 44 GHzWideband Microwave Downconverter. Analog Devices 2018. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/admv1014.pdf (accessed on 21 July 2025).
- Abbasi, M.; Carpenter, S.; Zirath, H.; Dielacher, F. A 80–95 GHz direct quadrature modulator in SiGe technology. In Proceedings of the 2014 IEEE 14th Topical Meeting on Silicon Monolithic Integrated Circuits in RF Systems, Newport Beach, CA, USA, 19–23 January 2014; IEEE: Piscataway, NJ, USA; pp. 56–58. [Google Scholar] [CrossRef]
- Pérez, B.; Pulido, V.A.; Perez-Mato, J.; Cabrera, F. 360° phase detector cell for measurement systems based on switched dual multipliers. IEEE Microw. Wirel. Compon. Lett. 2017, 27, 503–505. [Google Scholar] [CrossRef]
- Pérez-Díaz, B.; Araña-Pulido, V.; Cabrera-Almeida, F.; Dorta-Naranjo, B.P. Phase shift and amplitude array measurement system based on 360° switched dual multiplier phase detector. IEEE Trans. Instrum. Meas. 2021, 70, 8005411. [Google Scholar] [CrossRef]
- Dorta-Naranjo, B.P.; Araña-Pulido, V.; Cabrera-Almeida, F.; Jiménez-Yguácel, E. A 2–18 GHz 360° Phase Detector based on Switched Dual Multipliers and Fixed Delay Lines. IEEE Trans. Instrum. Meas. 2025, 74, 8501010. [Google Scholar] [CrossRef]
- MA4EX600L. Silicon Double Balanced HMICTM Mixer 4.2–6.0 GHz. Macom 2023. Available online: https://cdn.macom.com/datasheets/MA4EX600L1-1225.pdf (accessed on 21 July 2025).
- ADL5906. 10 MHz to 10 GHz 67 dB TruPwr Detector. Analog Devices 2023. Available online: https://www.analog.com/media/en/technical-documentation/data-sheets/adl5906.pdf (accessed on 21 July 2025).
- Umpierrez, P.; Arana, V.; Ramirez, F. Experimental Characterization of Oscillator Circuits for Reduced-Order Models. IEEE Trans. Microw. Theory Tech. 2012, 60, 3527–3541. [Google Scholar] [CrossRef]
- Höflinger, F.; Müller, J.; Törk, M.; Reindl, L.; Burgard, W. A wireless micro inertial measurement unit (IMU). In Proceedings of the 2012 IEEE International Instrumentation and Measurement Technology Conference Proceedings, Graz, Austria, 13–16 May 2012; pp. 2578–2583. [Google Scholar] [CrossRef]
- García, J.; Molina, J.M.; Trincado, J.; Sánchez, J. Analysis of sensor data and estimation output with configurable UAV platforms. In Proceedings of the Sensor Data Fusion: Trends, Solutions, Applications (SDF), Bonn, Germany, 10–12 October 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Varavin, A.; Ermak, G.; Vasiliev, A.; Fateev, A.; Varavin, N.; Zacek, F.; Zajac, J. Three-channel phase meters based on the AD8302 and field programmable gate arrays for heterodyne millimeter wave interferometer. Telecommun. Radio Eng. 2016, 75, 1009–1025. [Google Scholar] [CrossRef]
- Philippe, B.; Reynaert, P. A Quadrature Phase Detector in 28nm CMOS for Differential mm-Wave Sensing Applications Using Dielectric Waveguides. In Proceedings of the IEEE 44th European Solid State Circuits Conference (ESSCIRC) (ESSCIRC), Dresden, Germany, 3–6 September 2018; pp. 114–117. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Low (0 V) | High (3.3 V) | |
|---|---|---|---|
| P1-S1 (Branch 1) | In | Off | On |
| P2-S2 (Branch 2) | In | Off | On |
| P3-S3 (Branch 3) | In | Off | On |
| P4-S4 (Switch 1) | In | Phase-shifted | In phase |
| P5-S5 (Switch 2) | In | Phase-shifted | In phase |
| P6-S6 (Switch 3) | In | Phase-shifted | In phase |
| P7 () | Out | ||
| P8 () | Out | ||
| P9 () | Out |
| Switches | Output Voltage of Phase Detector | ||||
|---|---|---|---|---|---|
| S4 | S5 | S6 | |||
| 0 | 0 | 0 | |||
| 1 | 0 | 0 | |||
| 0 | 1 | 1 | |||
| 0 | 0 | 1 | |||
| A | Curve | Inputs | ||
|---|---|---|---|---|
| 2.3169 | 2.0173 | 243.5288 | 1-2 | |
| 2.3044 | 1.8025 | 127.1475 | 1-2 | |
| 2.3161 | 2.0857 | 84.8720 | 2-3 | |
| 2.3444 | 1.8893 | 320.1708 | 2-3 | |
| 2.3636 | 1.9995 | 343.6281 | 3-1 | |
| 2.3558 | 1.7404 | 214.9538 | 3-1 |
| Frequency (GHz) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 4.7 | 4.8 | 4.9 | 5.0 | 5.1 | 5.2 | 5.3 | 5.4 | 5.5 | 5.6 | 5.7 | |
| (dBm) | −46 | −49 | −51 | −51 | −50 | −52 | −52 | −52 | −50 | −50 | −45 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Araña-Pulido, V.; Dorta-Naranjo, B.P.; Cabrera-Almeida, F.; Jiménez-Yguácel, E. C Band 360° Triangular Phase Shift Detector for Precise Vertical Landing RF System. Appl. Sci. 2025, 15, 8236. https://doi.org/10.3390/app15158236
Araña-Pulido V, Dorta-Naranjo BP, Cabrera-Almeida F, Jiménez-Yguácel E. C Band 360° Triangular Phase Shift Detector for Precise Vertical Landing RF System. Applied Sciences. 2025; 15(15):8236. https://doi.org/10.3390/app15158236
Chicago/Turabian StyleAraña-Pulido, Víctor, B. Pablo Dorta-Naranjo, Francisco Cabrera-Almeida, and Eugenio Jiménez-Yguácel. 2025. "C Band 360° Triangular Phase Shift Detector for Precise Vertical Landing RF System" Applied Sciences 15, no. 15: 8236. https://doi.org/10.3390/app15158236
APA StyleAraña-Pulido, V., Dorta-Naranjo, B. P., Cabrera-Almeida, F., & Jiménez-Yguácel, E. (2025). C Band 360° Triangular Phase Shift Detector for Precise Vertical Landing RF System. Applied Sciences, 15(15), 8236. https://doi.org/10.3390/app15158236