1. Introduction
Ground penetrating radar (GPR) is a non-invasive geophysical imaging technique that uses electromagnetic waves to detect and map subsurface structures. Its versatility and high-resolution capabilities have made it an indispensable tool in diverse applications, including civil engineering, utility mapping, archeology, environmental monitoring, and geotechnical investigations. GPR systems generate different types of data representations, such as A-scans (single trace), B-scans (cross-sectional images), C-scans (horizontal slices), and full 3D volumes, each providing varying levels of detail about subsurface features [
1,
2,
3,
4].
Despite its widespread adoption, interpreting GPR data remains a challenging task. The complexity arises from a range of factors: low signal-to-noise ratios, material heterogeneity, clutter, overlapping reflections, and ambiguities in characteristic patterns such as hyperbolas. Although still common in practice, manual interpretation is time-consuming, subjective, and highly reliant on expert knowledge. Traditional signal processing techniques, such as filtering, migration, and deconvolution, can help improve image clarity but often fall short in reliably extracting high-level information, especially in complex or noisy environments [
5,
6,
7,
8,
9].
Over the past decade, artificial intelligence (AI) has emerged as a transformative solution to many of these limitations. Classic machine learning (ML) techniques, including support vector machines (SVMs), random forests, and clustering algorithms, have demonstrated promise in automating tasks such as object classification and anomaly detection in GPR data. More recently, deep learning (DL) models—especially convolutional neural networks (CNNs) and U-Net-based architectures—have pushed the frontier by achieving superior performance in feature extraction, segmentation, and 3D data analysis. Additionally, hybrid models that incorporate physical knowledge, or fuse GPR with other sensing modalities such as LiDAR and InSAR, show growing potential to overcome generalization and data scarcity issues [
10,
11,
12,
13].
The goal of this review is to provide a comprehensive and structured overview of AI-driven techniques for interpreting GPR data. By bridging the theoretical underpinnings of AI models with practical deployment challenges, we aim to assess how well these methods translate to real-world scenarios. In particular, we focus on the evolution of AI models tailored for GPR, the methodological diversity within this space, and the spectrum of applications that demonstrate their impact [
14,
15,
16,
17].
This review is organized as follows:
Section 2 outlines the evolution of AI in GPR interpretation, presenting a historical and conceptual framework for understanding key methodological advances.
Section 3 provides a detailed survey of specific techniques, categorized by their underlying AI approach and application domain.
Section 4 discusses the translation of theory into practice, examining real-world case studies, performance trade-offs, and interpretability challenges. Finally,
Section 5 identifies current gaps, unresolved challenges, and future research directions at the intersection of AI and GPR.
2. Evolution of AI in GPR Interpretation
Artificial intelligence (AI) is increasingly a cornerstone in efforts to advance the interpretation of GPR data. Traditional signal processing techniques, while foundational, are limited in their ability to handle noisy, complex, or large-volume GPR datasets. Over time, researchers have adopted progressively sophisticated AI techniques—ranging from classic ML to DL and hybrid models—to improve detection, classification, segmentation, and data fusion. This section outlines the evolution of AI approaches for GPR interpretation, their key characteristics, and the datasets and evaluation practices that support their development.
2.1. From Rule-Based Systems to Classic Machine Learning
The earliest attempts to automate GPR interpretation employed rule-based systems and handcrafted algorithms designed to detect specific patterns such as hyperbolas (characteristic signatures of buried objects). These methods relied heavily on domain expertise and threshold-based logic but lacked robustness and adaptability across different environments.
Classic ML methods emerged in the early 2000s as researchers began exploring data-driven techniques to overcome these limitations. Algorithms such as SVMs, random forests, k-nearest neighbors (KNN), and Naïve Bayes classifiers were used to classify GPR reflections based on manually extracted features, such as amplitude, time-of-flight, and frequency-domain attributes.
Feature engineering played a pivotal role in this phase. Techniques such as wavelet transforms, histograms of oriented gradients, texture analysis, and principal component analysis helped reduce dimensionality and improve classification accuracy. For example, wavelet-based feature extraction combined with SVMs was found to be effective for classifying pipe and cable signatures in noisy environments [
18,
19,
20].
However, classic ML approaches have inherent limitations. They are sensitive to feature selection, require extensive tuning, and often struggle to generalize across different soil conditions or GPR hardware configurations. These drawbacks set the stage for the rise of deep learning. A comparison of rule-based systems with classic ML is summarized in
Table 1.
2.2. Rise of Deep Learning in GPR Interpretation
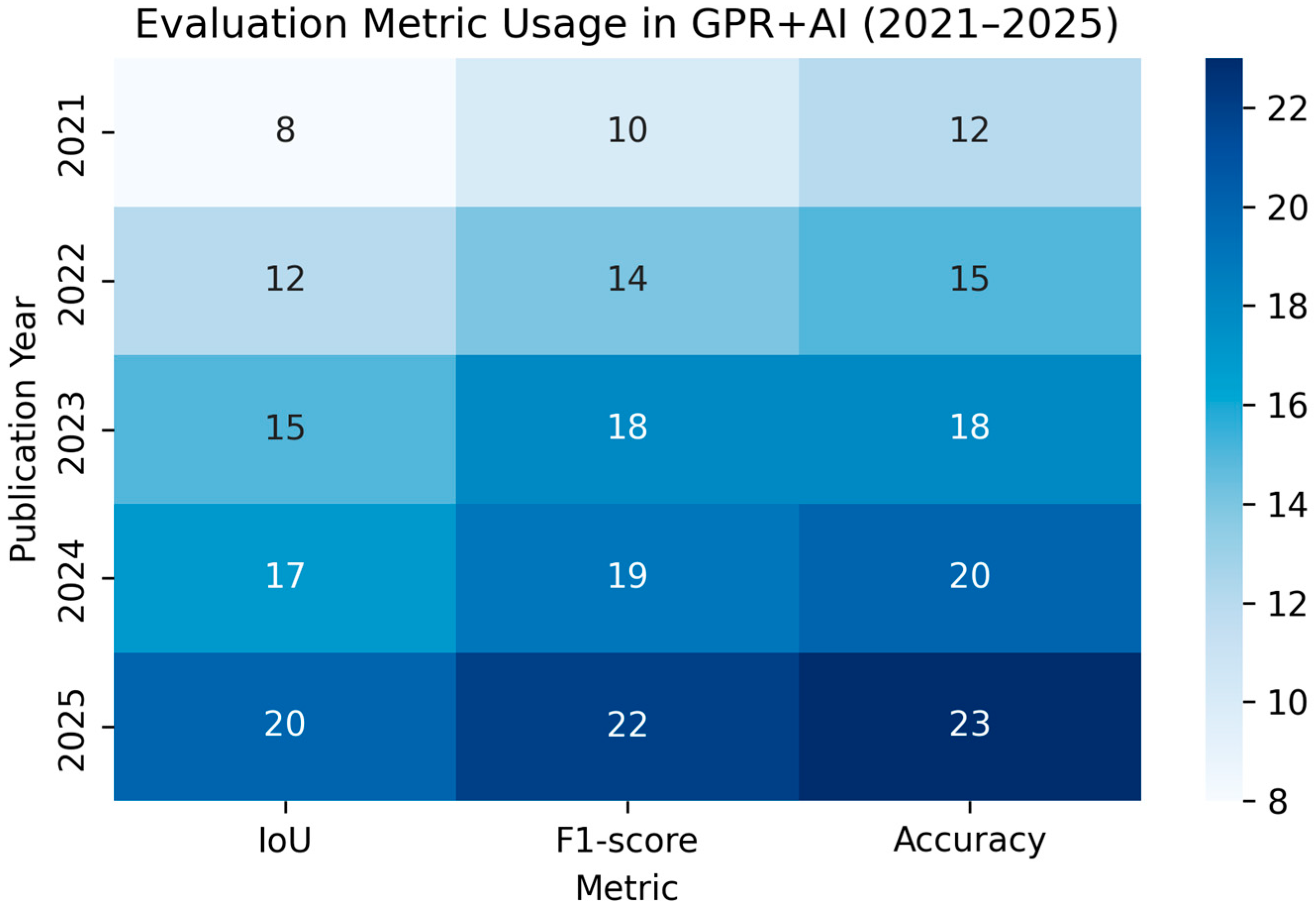
The introduction of DL models—particularly CNNs—marked a paradigm shift in GPR data interpretation. Unlike traditional ML methods, DL models can automatically learn spatial and temporal features from raw data, reducing the need for manual feature engineering. A heatmap of evaluation metric frequencies taken from studies of GPR with AI undertaken between 2021 and 2025 is presented in
Figure 1.
CNNs have been widely adopted for hyperbola detection, object localization, and subsurface image segmentation. Models such as YOLO (You Only Look Once), Faster R-CNN, and Mask R-CNN have been adapted to detect buried objects in GPR B-scans with remarkable precision. For instance, researchers have trained CNNs on annotated datasets to detect hyperbolic signatures with high accuracy, achieving real-time performance suitable for field deployment [
21].
More advanced architectures such as U-Net (originally designed for biomedical image segmentation) have been applied to GPR data with immense success. U-Net’s encoder–decoder structure enables the model to capture both low-level and high-level contextual information, making it ideal for segmenting complex subsurface images. Researchers have extended U-Net to 3D versions to work with volumetric GPR data, especially in applications such as archeological prospection and infrastructure inspection [
22,
23,
24].
Recurrent neural networks (RNNs) and long short-term memory (LSTM) networks have also been explored, particularly for analyzing sequential GPR data where temporal patterns are relevant. However, their adoption remains limited compared to CNN-based models [
25].
Figure 2 shows the data-to-decision pipeline using DL. Despite their impressive performance, DL models require large labeled datasets and substantial computational resources. Their “black-box” nature also raises concerns about interpretability, especially in safety-critical applications such as bridge inspections and utility mapping.
2.3. Transfer Learning and Pretrained Models
To address data scarcity, researchers have increasingly turned to transfer learning. Pretrained models on large natural image datasets (e.g., ImageNet) can be fine-tuned on smaller GPR datasets, allowing researchers to leverage generalized feature extractors while adapting to domain-specific tasks [
26,
27].
Transfer learning significantly reduces training time and data requirements, often achieving comparable or superior performance to models trained from scratch. It also introduces possibilities for cross-domain adaptation, where models trained in one environment (e.g., sandy soils) can generalize to others (e.g., clay or concrete) with minimal retraining.
However, challenges remain. Pretrained models may carry biases from their original domain, and fine-tuning these models for GPR tasks requires careful preprocessing, data augmentation, and normalization strategies. A summary of pretrained models used in GPR interpretation is presented in
Table 2.
2.4. Hybrid and Physics-Informed Approaches
Hybrid models represent the next frontier in AI-driven GPR interpretation. These approaches combine the strengths of data-driven learning with domain-specific knowledge, such as electromagnetic theory and subsurface physics [
28,
29,
30].
Figure 3 shows the hybrid pipeline combining physics-based simulation with deep learning.
Physics-informed neural networks (PINNs) and model-guided DL frameworks are gaining traction. For example, instead of learning subsurface features purely from data, models are constrained by known relationships, such as Maxwell’s equations or soil permittivity profiles. This improves generalization and enhances trust in the model’s output, especially when deployed in unfamiliar terrains [
31,
32].
Another strand of the hybrid approach involves data fusion, combining GPR with complementary sensing technologies such as LiDAR, InSAR, or optical imaging. Multimodal fusion helps overcome the limitations of individual sensors and enhances the accuracy of detection and classification tasks. For example, combining InSAR deformation data with GPR time slices has been proposed for the structural health monitoring of bridges and tunnels.
Ensemble methods that combine multiple AI models (e.g., SVM + CNN) or fuse handcrafted and learned features have also shown promise, particularly in handling imbalanced or noisy datasets.
2.5. Datasets and Evaluation Practices
The effectiveness of AI models in GPR interpretation is highly dependent on the availability and quality of training datasets. However, the scarcity of publicly accessible GPR datasets continues to hinder large-scale benchmarking, model comparison, and the reproducibility of results. Despite the growing interest in AI-driven GPR applications, only a limited number of datasets are widely used within the research community. Among them, gprMax stands out as a prominent open-source simulation tool that generates synthetic GPR data using finite-difference time-domain methods, enabling controlled experimentation and training data generation. Real-world datasets exported from commercial software such as Radan and ReflexW are also utilized, primarily in academic and industrial studies; however, their availability is often restricted due to licensing issues or proprietary concerns. In addition, many researchers develop custom field datasets tailored to specific application domains, such as utility detection at dedicated test sites or subsurface mapping in archeological investigations. While these datasets offer valuable domain-specific information, they are typically not standardized or openly shared, limiting their broader impact. The lack of centralized repositories or unified formats further complicates dataset accessibility and interoperability across research groups. This fragmented landscape poses significant challenges to the development, evaluation, and generalization of AI models, emphasizing the urgent need for collaborative efforts to build comprehensive, high-quality, and openly available GPR datasets that can drive innovation and facilitate robust comparisons across different AI methodologies. Addressing this issue is essential for advancing the field and bridging the gap between academic research and the practical deployment of AI in GPR interpretation [
33,
34].
To enhance the diversity and volume of training data in GPR interpretation, researchers frequently utilize data augmentation techniques such as flipping, cropping, noise injection, and the synthetic overlay of hyperbolas. These methods help mitigate data scarcity and improve model generalization. Despite these efforts, there remains a critical need for standardized, annotated datasets that comprehensively represent a wide range of soil conditions, subsurface object types, and GPR system configurations. The absence of such benchmarks hampers the fair comparison and reproducibility of AI models in this domain. When evaluating model performance, researchers typically adopt metrics tailored to specific tasks: Accuracy, Precision, Recall, and F1-score are commonly used for classification tasks; Intersection-over-Union (IoU) and Dice coefficient are employed for segmentation tasks; and Mean Average Precision (mAP) is the standard for object detection performance. However, the evaluation landscape lacks consistency and methodological rigor. Many studies do not incorporate essential validation practices such as cross-validation, ablation studies, or domain adaptation testing. This oversight limits our understanding of how well models generalize across different conditions and use cases, and poses challenges when seeking to assess robustness and practical applicability. Without unified evaluation protocols and diverse, high-quality datasets, the progress of AI-driven GPR interpretation risks being fragmented and difficult to benchmark reliably across research efforts [
35,
36,
37].
3. AI Techniques and Their Applications
Recent advancements in AI have transformed GPR interpretation from a manual, expert-driven process into a semi- or fully automated task. This section categorizes AI techniques into three broad groups—machine learning, deep learning, and hybrid/multimodal approaches—and maps them to key applications, ranging from utility mapping and infrastructure monitoring to archeological prospecting and autonomous robotic systems.
3.1. Machine Learning Approaches
3.1.1. Traditional Approaches and Feature Engineering
Classic ML techniques have played a crucial role in early efforts to automate GPR interpretation. These methods often rely on handcrafted features extracted from the raw data. Commonly used features include amplitude statistics, time-domain waveforms, texture measures (e.g., GLCM), and spectral content obtained via Fourier or wavelet transforms.
Algorithms such as SVMs, KNN, random forests, and Naïve Bayes classifiers have been trained to recognize object types or material boundaries in B-scans. These methods are particularly effective when paired with dimensionality reduction techniques like principal component analysis or independent component analysis.
In unsupervised contexts, clustering algorithms (e.g., K-means, DBSCAN) have been used to separate regions in GPR data based on statistical similarity. These are often employed in anomaly detection tasks, where the goal is to flag unusual subsurface features (e.g., voids, buried drums) without prior labels.
3.1.2. Limitations and Case Studies
Machine learning approaches, while generally lightweight and interpretable, often face challenges in generalizing across diverse or complex scenarios. Their effectiveness tends to diminish when confronted with noisy data, cluttered environments, or soil types that differ from those seen during training. Despite these limitations, ML methods continue to hold practical value in specific GPR applications, particularly in contexts where computational efficiency and model transparency are essential. For example, they are well-suited for utility detection in structured environments where subsurface conditions are relatively consistent and predictable. In transportation infrastructure projects, such as highways and railways, ML models are frequently employed for identifying layer boundaries, aiding engineers in assessing subsurface stratigraphy with minimal manual intervention. Additionally, ML techniques are often used as a preliminary step in anomaly detection, effectively serving as an initial screening tool that flags regions of interest for further analysis. These flagged regions can then be passed on to more complex deep learning models for refined interpretation, enabling a tiered analysis pipeline that balances speed, interpretability, and accuracy. By incorporating ML methods at the early stages of the GPR data processing workflow, practitioners can efficiently reduce data volume and focus computational resources on the most relevant segments. Furthermore, the use of ML in this hierarchical framework provides an added layer of robustness by combining fast decision-making with deeper, more nuanced analysis downstream. As such, ML approaches, while limited in adaptability, remain a valuable component in GPR interpretation pipelines when deployed strategically within their strengths [
38,
39]. The traditional ML algorithms used with GPR are summarized in
Table 3.
3.2. Deep Learning Techniques
Deep learning (DL) offers a data-driven approach that eliminates the need for manual feature engineering. DL models learn hierarchical representations directly from raw or preprocessed GPR data, enabling robust performance across varied tasks.
3.2.1. Feature-Based Classification and Clustering
Hyperbola detection is one of the most extensively studied tasks in GPR analysis, as it signifies the presence of buried point-like or elongated objects such as pipes, rebar, and cables. Traditionally, these hyperbolic signatures have served as key indicators in subsurface imaging due to the distinct geometric patterns that emerge when radar waves reflect off small, discrete targets. With the advent of deep learning, CNNs have been increasingly employed for this task, offering robust performance in identifying hyperbolic features amidst noisy and complex backgrounds. These CNNs are typically trained on large, annotated datasets, enabling them to learn the spatial and structural characteristics of hyperbolic patterns with high precision. To effectively perform hyperbola detection, researchers have adapted well-established object detection frameworks originally developed for natural image processing, including YOLO, Faster R-CNN, and the Single Shot MultiBox Detector (SSD). YOLO is known for its real-time detection capabilities—it treats detection as a regression problem, allowing it to simultaneously predict bounding boxes and class probabilities. Faster R-CNN offers high accuracy by using a region proposal network to generate candidate object regions before classification, making it suitable for high-resolution GPR data. Meanwhile, SSD balances speed and accuracy by predicting bounding boxes at multiple scales from feature maps, allowing the efficient detection of hyperbolas of varying sizes. The adaptation of these architectures to GPR data has significantly advanced the automation and reliability of hyperbola detection, facilitating the faster and more objective interpretation of subsurface features, which is crucial for applications in utility mapping, infrastructure assessment, and archaeological exploration [
40,
41].
These models are capable of detecting multiple hyperbolas within a single frame, even in high-noise environments, making them highly effective for practical applications. To enhance the accuracy and reliability of their predictions, researchers have integrated various post-processing techniques, such as non-maximum suppression and ellipse fitting. These refinements help reduce false positives and improve the precision of object localization. As a result, such models have been successfully applied across a range of domains, including utility mapping in complex urban infrastructure and the detection of reinforcement bars during concrete inspection. Their robustness under challenging conditions and adaptability to different use cases underscore their growing importance in GPR interpretation, where efficient and accurate feature recognition is essential for both construction and maintenance workflows [
42,
43,
44].
3.2.2. Semantic and Instance Segmentation
For a more granular interpretation of GPR data, semantic segmentation models have emerged as powerful tools by which to classify each pixel or voxel within a GPR image. Unlike traditional classification or object detection approaches that provide coarse results, semantic segmentation offers fine-grained spatial understanding by assigning a class label to every element of the input data. Several deep learning architectures have been widely adopted for this task. U-Net and its residual variant ResU-Net are among the most popular choices for both 2D and 3D GPR data segmentation, thanks to their encoder–decoder structure and skip connections that preserve spatial detail. DeepLabv3+ enhances segmentation performance further by incorporating atrous convolutions and spatial pyramid pooling, enabling multi-scale context aggregation, which is particularly useful for capturing subtle variations in subsurface features. Another notable architecture is SegNet, which also employs an encoder–decoder structure but is optimized for edge-aware boundary detection, making it suitable for applications that require the precise delineation of object boundaries.
These semantic segmentation models have demonstrated strong performance in mapping complex subsurface structures across a variety of domains. For instance, in civil engineering, they are used for tunnel lining assessment and defect localization by accurately identifying anomalies such as cracks or voids. In environmental studies, such models enable the detailed mapping of tree root systems, which is crucial for understanding soil-vegetation interactions and preventing infrastructure damage. Archeological investigations benefit from the ability of these models to distinguish layered interfaces and buried artifacts with high precision. Additionally, in geotechnical applications, semantic segmentation contributes to subsurface stratigraphy modeling, where detecting and interpreting layers of soil or rock is essential for construction planning and hazard assessment. Overall, the integration of semantic segmentation into GPR interpretation workflows enhances both the accuracy and interpretability of subsurface imaging, making it a valuable advancement for both research and practical applications [
45,
46].
3.2.3. Volumetric and 3D CNNs
The growing adoption of 3D GPR systems, such as multi-channel arrays and step-frequency radars, has driven the need for advanced models capable of processing volumetric data. Unlike traditional 2D approaches, these systems generate three-dimensional datasets that encompass spatial variations across both slices and depth. To address this, researchers have turned to 3D CNNs and VNet-like architectures, which are specifically designed to leverage the spatial correlations inherent in volumetric data. These models enable more effective feature extraction and pattern recognition in complex underground environments. As a result, they are particularly suited to applications requiring high-resolution interpretation, such as detecting archeological remains, identifying buried walls, and mapping intricate tree root systems. By incorporating depth-wise context and inter-slice continuity, 3D models offer a significant advantage over their 2D counterparts in terms of accuracy and reliability [
47,
48,
49].
Despite these benefits, the application of 3D models presents several challenges. Chief among them are the substantial computational costs and memory requirements associated with training and deploying 3D CNNs. Processing large-scale volumetric GPR datasets demands high-performance hardware and optimized algorithms to maintain efficiency. Furthermore, the increased data dimensionality can lead to extended training times and the risk of overfitting, especially in scenarios with limited annotated samples. Nonetheless, the superior capability of 3D models to capture complex subsurface structures continues to justify their growing use in the field. Ongoing research efforts aim to mitigate these challenges through model compression, hardware acceleration, and data augmentation techniques, making 3D GPR interpretation increasingly accessible and practical for a wide range of geophysical applications [
50].
3.2.4. Temporal Modeling with RNNs and LSTMs
While CNNs have proven highly effective in spatial analysis, certain GPR applications require attention to temporal dependencies, especially in scenarios involving sequential scans or multi-pass surveys. In such cases, recurrent neural networks and their advanced variant, LSTM networks, offer unique advantages by capturing evolving patterns over time. These temporal models have demonstrated strong performance in key GPR interpretation challenges. The primary application is monitoring changes in subsurface conditions—vital for structural health monitoring, detecting environmental shifts, and observing subsurface movements during repeated surveys. LSTMs have also shown effectiveness in time-lapse GPR studies, where consistent feature detection is essential despite variations in noise and scanning parameters. By learning and leveraging temporal correlations, these models are capable of highlighting subtle shifts that static spatial models may miss [
51,
52].
A comparison of CNN (classification), U-Net (segmentation), and YOLO (object detection) adapted for GPR is set out in
Figure 4. Beyond change detection, temporal models are valuable in addressing the persistent issue of transient noise and motion artifacts in GPR data. These disturbances can obscure true subsurface reflections and degrade interpretation accuracy, particularly in dynamic or mobile survey contexts. RNN-based architectures help mitigate this by modeling the expected temporal continuity of genuine subsurface signals, allowing them to distinguish between structural features and non-stationary noise. Incorporating such temporal modeling techniques into AI-driven GPR workflows enhances robustness and interpretability in time-sensitive applications. While not yet mainstream, these approaches hold considerable potential for tasks such as infrastructure degradation monitoring and the early detection of dynamic subsurface events such as sinkhole formation. Their integration paves the way for more advanced spatiotemporal analyses, pushing the boundaries of conventional deep learning in GPR interpretation.
3.3. Hybrid and Multimodal Approaches
Recognizing the limitations of purely data-driven or purely physics-based models, researchers have started combining both into hybrid frameworks that enhance robustness, accuracy, and generalizability.
3.3.1. Physics-Informed AI Models
Physics-informed neural networks (PINNs) and similar architectures incorporate constraints derived from Maxwell’s equations or material models into the loss function of AI models. This improves interpretability and ensures physically plausible outputs, particularly when utilizing sparse or noisy data. These examples include estimating permittivity profiles using AI models regularized by way of electromagnetic theory, constraining depth estimates in layer detection based on known propagation velocities, and so on [
53,
54].
These methods are highly relevant for geotechnical monitoring, where physical consistency is essential.
3.3.2. Sensor Fusion and Multimodal Learning
Combining GPR with complementary data sources significantly enhances interpretive accuracy and mitigates ambiguity, particularly in complex subsurface investigations. Multimodal data fusion strategies frequently integrate GPR with technologies such as LiDAR or photogrammetry for high-resolution surface mapping, InSAR or SAR for detecting structural movements, and visual or infrared imaging for capturing material contrasts. These integrated approaches leverage the strengths of each modality to offer a more comprehensive understanding of the surveyed environment. Data fusion can occur at different stages of the processing pipeline: early fusion involves concatenating raw data or extracted feature maps from each modality before feeding them into a model; late fusion merges the decision outputs from independently trained models to achieve a final prediction; and intermediate fusion employs architectures that learn shared representations across modalities through joint training. Each of these fusion strategies offers distinct advantages depending on the application context, data quality, and computational resources available. Early fusion may preserve richer contextual information but can be sensitive to data alignment and noise, while late fusion offers modularity and ease of implementation. Intermediate fusion often provides a balance, enabling deep learning models to exploit complex inter-modal relationships. These multimodal fusion techniques are proving particularly effective in real-world applications such as infrastructure health monitoring—where assessing the integrity of bridges, tunnels, or roads requires both surface and subsurface data—and in archaeological or cultural heritage contexts, where accurately mapping buried structures with minimal intrusion is essential. By synergizing GPR with complementary sensing technologies and applying intelligent fusion strategies, researchers and practitioners can significantly improve the reliability and depth of subsurface interpretation, facilitating more informed decision-making in both engineering and environmental domains [
55,
56]. The multimodal fusion framework integrating GPR, RGB, and thermal data for infrastructure assessment is shown in
Figure 5 and
Table 4.
3.3.3. Ensemble Models and Attention Mechanisms
To further enhance the performance of AI models in GPR interpretation, ensemble methods have emerged as a powerful strategy. These techniques combine the outputs of multiple models to leverage their complementary strengths. For example, stacking architectures that integrate CNNs with gradient boosting classifiers can significantly improve classification accuracy and generalization. CNNs are adept at learning spatial patterns and extracting hierarchical features from radargrams, while gradient boosting methods such as XGBoost are effective at handling structured data and correcting errors made by earlier models in the ensemble. By combining these distinct capabilities, the overall system becomes more robust to noise and variability in GPR data [
57,
58].
In addition to ensembling, attention mechanisms have been increasingly adopted to further refine model focus. These mechanisms dynamically weight the importance of different regions in the input data, allowing the model to concentrate on critical features such as hyperbola peaks, object boundaries, or subtle reflection patterns. This selective focus improves interpretability and enables the more accurate detection of features, even under challenging conditions. Moreover, both ensemble strategies and attention mechanisms are particularly valuable in scenarios with a class imbalance or limited labeled data—common challenges in GPR applications. Together, they help mitigate overfitting, enhance feature discrimination, and ultimately deliver more reliable interpretation results.
3.4. Applications in Practice
AI-driven GPR interpretation is being deployed across multiple real-world domains. Below are key application areas and illustrative examples.
3.4.1. Utility Mapping and Infrastructure Monitoring
In urban environments, GPR is commonly used to detect buried cables, pipes, and ducts. AI models trained on annotated B-scans can automate this process with high accuracy. One particular case study, using a CNN-based model trained on synthetic and field data, achieved 94% precision in detecting PVC and metallic pipes in mixed soils, significantly outperforming human operators in cluttered scenarios. Another case study, involving bridge and tunnel inspection, benefited from AI-enhanced GPR, where segmentation models detected delamination, voids, and corrosion-related anomalies [
59,
60].
3.4.2. Archeology and Environmental Studies
GPR is invaluable for non-invasive archeological prospecting. AI tools reduce the time and subjectivity involved in manually interpreting vast GPR grids. One case study, employing a U-Net model trained on 3D GPR volumes from Roman villa excavation sites, successfully segmented buried walls and foundations—as validated by ground-truth excavations. In environmental science, AI helps detect tree root networks, buried waste, and voids beneath forest floors or urban green spaces [
61,
62,
63].
3.4.3. Multilayer Analysis
Multilayer environments are ubiquitous in real-world GPR applications, including geotechnical assessments, archeological prospection, and subsurface utility mapping. These scenarios typically involve multiple strata with varying electromagnetic properties, causing signal attenuation, overlapping reflections, and complex hyperbolic patterns. Accurately interpreting such data remains a significant challenge for AI systems due to issues of generalization, ambiguity, and the need for representative training data.
Recent studies have begun to address these challenges using tailored AI models and hybrid approaches. (1) Deep Learning with Stratified Labeling: Research works proposed CNNs trained on synthetically generated multilayer datasets with known material transitions [
35,
64]. These models learn to distinguish layer interfaces and buried objects even when hyperbolic signatures overlap. (2) Physics-Informed AI: Integrating prior knowledge of electromagnetic wave propagation has shown promise in improving robustness across varying layer properties. For example, [
65] introduced a hybrid CNN + physics framework where model outputs are regularized using physical constraints related to permittivity and layer thickness. (3) Domain Adaptation for Generalization: To reduce the domain gap between simulated and real multilayer GPR data, researchers employed adversarial domain adaptation and style transfer to enhance generalization from synthetic to field-collected data [
66]. (4) Multi-Task Learning: Some models perform simultaneous detection and stratigraphic segmentation, thereby encouraging the network to learn contextual features across depth layers [
67]. (5) Transformer-Based Architectures: Recently, researchers explored transformer-based models for sequence modeling of GPR B-scans, allowing the network to retain long-range dependencies across multiple reflections—an advantage in complex stratigraphy [
68].
These advancements highlight that AI-driven multilayer analysis is an active area of research, and continued progress will depend on high-quality annotated datasets, physically informed learning objectives, and methods for robust domain generalization.
3.4.4. Autonomous and Robotic Systems
Autonomous vehicles, such as drones (UAVs) and ground robots (UGVs), are being equipped with GPR for remote and mobile surveying. These platforms often run lightweight DL models or quantized versions of CNNs for real-time analysis. One such example involves an edge-deployed YOLOv5 model on a robotic rover detecting buried pipes in real-time at speeds of 0.5 m/s, enabling the autonomous mapping of subsurface utilities during construction [
69,
70]. AI-GPR applications in field robotics are summarized in
Table 5.
3.5. Challenges and Best Practices
Despite the significant promise of AI techniques in GPR interpretation, their real-world deployment remains fraught with challenges. A primary concern is generalization: models trained under specific soil or environmental conditions often struggle when applied to different sites without further adaptation. Additionally, the scarcity of annotated GPR datasets (due to the high cost and expertise required for manual labeling) limits the performance and reliability of AI models. Interpretability also poses a serious issue, especially in high-stakes applications such as infrastructure monitoring or heritage conservation, where decision-making transparency is crucial; many AI systems still function as opaque black boxes. Moreover, computational constraints hinder the practical use of advanced models, as field-deployable hardware may not support the resource-intensive requirements of cutting-edge deep learning techniques. To address these limitations, researchers are developing various mitigation strategies. These include data augmentation and the use of synthetic data generation tools such as gprMax, which can create diverse training scenarios to improve model robustness. Transfer learning and domain adaptation are also increasingly adopted to help models generalize better across varied conditions with limited new data. To tackle the interpretability issue, explainable AI (XAI) methods such as Grad-CAM are being integrated to highlight important features contributing to model decisions, enhancing user trust. Furthermore, modular pipeline designs—where detection, classification, and post-processing are separated—are encouraged to improve adaptability, interpretability, and computational efficiency. These strategies are particularly relevant in sensitive contexts such as buried structure mapping in heritage sites, where accurate and non-invasive subsurface analysis is vital. In such applications, combining AI-driven tools with expert domain knowledge and physically informed constraints offers a promising pathway forward for reliable and ethical deployment.
AI techniques have transformed how GPR data is interpreted, moving from handcrafted heuristics to robust, adaptive models capable of real-time decision-making. Classic ML methods remain relevant for lightweight tasks, while DL architectures dominate in precision-demanding applications. Hybrid approaches and multimodal learning offer a pathway towards more reliable and interpretable models [
71,
72,
73].
The best practice pipeline for the development of an AI-GPR model is presented at
Figure 6. Crucially, the success of these techniques depends not just on technical sophistication but also on thoughtful integration into domain-specific workflows. The following sections of this paper explore how these methods perform in real-world scenarios and the challenges that remain in bridging the gap between theory and practice [
74,
75].
4. Discussion
AI-driven techniques have significantly advanced the field of GPR interpretation, but their deployment is not without complexity. A key strength of AI models (particularly deep learning) lies in their ability to generalize across various GPR scenarios, detecting patterns such as hyperbolas, stratigraphic layers, or structural voids that might elude manual inspection. These models excel at tasks such as segmentation and object detection, especially when applied to large datasets or complex 3D GPR volumes. Moreover, hybrid approaches that integrate physics-based constraints or multimodal sensor data represent promising strides towards more robust and interpretable models.
Despite these advancements, there remains a noticeable gap between academic research and practical implementation. Most AI models are developed and tested under controlled environments using clean, well-labeled datasets—often synthetic or from limited field trials. In contrast, real-world GPR data are noisy, variable, and often lack ground truth. This disparity limits the direct transferability of many AI solutions to operational contexts such as construction sites, heritage conservation zones, or disaster response efforts. Bridging this gap will require not only improved model generalization but also stronger collaboration between AI researchers and GPR domain experts.
Another important issue is interpretability. While deep learning offers impressive performance, it often functions as a “black box,” producing outputs without clear explanations. This lack of transparency can be problematic in high-stakes applications such as infrastructure monitoring or forensic investigations, where decisions may have legal or safety implications. XAI approaches, such as saliency maps, attention mechanisms, or rule-based post-processing, should be further explored and embedded into existing workflows to support user trust and decision-making.
Lastly, the potential of AI in GPR is not just in automation, but in augmenting expert analysis. Instead of replacing human interpreters, AI should act as an intelligent assistant, highlighting regions of interest, suggesting classifications, or accelerating repetitive tasks. In this sense, the future of AI in GPR lies not in full autonomy, but in thoughtful human–AI collaboration that leverages the strengths of both parties.
5. Open Challenges and Future Directions
5.1. Data Scarcity and Standardization
A fundamental challenge in applying AI to GPR interpretation is the lack of large, annotated, and diverse datasets. Unlike fields such as computer vision or natural language processing, GPR datasets are often proprietary, application-specific, and expensive to acquire. This scarcity hampers the training of high-performing deep learning models and makes fair benchmarking across studies difficult. Moving forward, the GPR community would benefit from collaborative initiatives to develop open-access benchmark datasets, incorporating a range of soil conditions, sensor types, and target materials. Synthetic data generation tools such as gprMax can help supplement real-world data, but their limitations must be carefully acknowledged [
76,
77,
78].
5.2. Model Generalization and Transferability
Generalization remains a major barrier to field deployment. Many AI models perform well in one environment but poorly in another due to differences in soil conductivity, antenna frequency, or survey geometry. Domain adaptation and transfer learning techniques offer a partial solution by enabling models trained in one domain to adapt to others. However, further work is needed to ensure robustness across diverse conditions. Incorporating meta-learning and continual learning strategies may allow models to update incrementally as new data become available, improving adaptability without requiring full retraining [
79,
80,
81,
82,
83,
84].
5.3. Explainability and Trust
As AI systems take on greater interpretive responsibility, ensuring that their decisions are understandable becomes vital. In domains such as infrastructure safety, law enforcement, and heritage preservation, interpretability is not optional. Future research should focus on integrating XAI methods—such as feature attribution, class activation mapping, and symbolic reasoning—into GPR analysis workflows. This would empower human experts to validate and refine AI outputs, fostering greater trust and accountability in decision-making processes [
85,
86,
87,
88,
89,
90].
5.4. Towards Integrated, Real-Time, and Edge-Aware Solutions
To truly bridge theory and practice, future AI models must be designed for deployment in real-time, field-ready environments. This involves reducing computational complexity, optimizing models for embedded hardware, and ensuring resilience to sensor noise or partial occlusion. Advances in edge AI, including model pruning and quantization, can facilitate on-device inference for mobile GPR platforms, such as UAVs, robotic rovers, or handheld units. Moreover, integrating AI models into modular interpretation pipelines, including pre-processing, detection, classification, and visualization, will streamline adoption and reduce operational friction [
91,
92,
93,
94,
95,
96,
97,
98,
99,
100,
101,
102].
Author Contributions
Conceptualization, L.Z. and A.M.A.; methodology, L.Z. and Y.L.; software, L.Z. and Y.L.; validation, L.Z., K.M. and A.M.A.; formal analysis, Y.L.; investigation, L.Z.; resources, K.M.; data curation, L.Z.; writing—original draft preparation, L.Z. and Y.L.; writing—review and editing, K.M. and A.M.A.; visualization, L.Z.; supervision, A.M.A.; project administration, K.M.; funding acquisition, A.M.A. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
No new data were created or analyzed in this study.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| AI | Artificial Intelligence |
| GPR | Ground Penetrating Radar |
| ML | Machine Learning |
| SVMs | Support Vector Machines |
| DL | Deep Learning |
| CNNs | Convolutional Neural Networks |
| KNN | K-nearest Neighbors |
| YOLO | You Only Look Once |
| RNNs | Recurrent Neural Networks |
| LSTM | Long Short-Term Memory |
| PINNs | Physics-Informed Neural Networks |
| IoU | Intersection-over-Union |
| mAP | Mean Average Precision |
| SSD | Shot MultiBox Detector |
| UAVs | Drones |
| UGVs | Ground Robots |
| XAI | Explainable AI |
References
- Rohman, B.P.; Nishimoto, M.; Ogata, K. Reconstruction of missing ground-penetrating radar traces using simplified U-Net. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Yue, Y.; Liu, H.; Meng, X.; Li, Y.; Du, Y. Generation of high-precision ground penetrating radar images using improved least square generative adversarial networks. Remote Sens. 2021, 13, 4590. [Google Scholar] [CrossRef]
- Wang, Q.; Chen, Y.; Shen, Y.; Li, M. Construction Environment Noise Suppression of Ground-Penetrating Radar Signals Based on an RG-DMSA Neural Network. Electronics 2024, 13, 2843. [Google Scholar] [CrossRef]
- Wang, X.; Liu, H. VAE-ResNet cascade network: An advanced algorithm for stochastic clutter suppression in ground penetrating radar data. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–12. [Google Scholar] [CrossRef]
- Liu, D.; Zhou, M.; Wang, X.; Shi, Z.; Sacchi, M.D.; Chen, W.; Liu, Z.; Wang, X. Enhancing Ground Penetrating Radar (GPR) Data Resolution Through Weakly Supervised Learning. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–13. [Google Scholar] [CrossRef]
- Lei, W.; Tan, X.; Luo, C.; Xue, W. Mutual Interference Suppression and Signal Enhancement Method for Ground-Penetrating Radar Based on Deep Learning. Electronics 2024, 13, 4722. [Google Scholar] [CrossRef]
- Tong, Z.; Zhang, Y.; Mao, T. Guiding GPT models for specific one-for-all tasks in ground penetrating radar. Autom. Constr. 2025, 171, 105979. [Google Scholar] [CrossRef]
- Zhang, J.; Lu, Y.; Yang, Z.; Zhu, X.; Zheng, T.; Liu, X.; Tian, Y.; Li, W. Recognition of void defects in airport runways using ground-penetrating radar and shallow CNN. Autom. Constr. 2022, 138, 104260. [Google Scholar] [CrossRef]
- Xue, W.; Chen, K.; Li, T.; Liu, L.; Zhang, J. Efficient underground target detection of urban roads in Ground-Penetrating Radar images based on neural networks. Remote Sens. 2023, 15, 1346. [Google Scholar] [CrossRef]
- Wang, Z.; Lei, M.; Wang, J.; Li, B.; Xu, J.; Jiang, Y.; Sui, Q.; Li, Y. Unsupervised deep learning-based ground penetrating radar image translation for internal defect recognition of underground engineering structures. Struct. Health Monit. 2024, 23, 649–670. [Google Scholar] [CrossRef]
- Yang, S.; Wang, Z.; Wang, J.; Cohn, A.G.; Zhang, J.; Jiang, P.; Nie, L.; Sui, Q. Defect segmentation: Mapping tunnel lining internal defects with ground penetrating radar data using a convolutional neural network. Constr. Build. Mater. 2022, 319, 125658. [Google Scholar] [CrossRef]
- Khedr, M.; Metawie, M.; Marzouk, M. Integrated ground penetrating radar and deep learning approach for rebar diameter classification in concrete elements. Front. Struct. Civ. Eng. 2025, 19, 524–540. [Google Scholar] [CrossRef]
- Chen, R.; Cao, L.; Lu, C.; Liu, L. Research on Intelligent Recognition Method of Ground Penetrating Radar Images Based on SAHI. Appl. Sci. 2024, 14, 8470. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, J.; Cohn, A.G.; Wang, Z.; Liu, H.; Kang, W.; Jiang, P.; Zhang, F.; Chen, K.; Guo, W.; et al. Arbitrarily-oriented tunnel lining defects detection from Ground Penetrating Radar images using deep Convolutional Neural networks. Autom. Constr. 2022, 133, 104044. [Google Scholar] [CrossRef]
- Park, D.W.; Kim, H.E.; Lee, K.; Park, J. Development of a Background Filtering Algorithm to Improve the Accuracy of Determining Underground Cavities Using Multi-Channel Ground-Penetrating Radar and Deep Learning. Remote Sens. 2024, 16, 3454. [Google Scholar] [CrossRef]
- Choi, Y.; Seo, S.; Jang, H.; Yoon, D. Improving the Performance of Deep-Learning-Based Ground-Penetrating Radar Cavity Detection Model using Data Augmentation and Ensemble Techniques. Geophys. Geophys. Explor. 2023, 26, 211–228. [Google Scholar]
- Qiu, Z.; Zhao, Z.; Chen, S.; Zeng, J.; Huang, Y.; Xiang, B. Application of an improved YOLOv5 algorithm in real-time detection of foreign objects by ground penetrating radar. Remote Sens. 2022, 14, 1895. [Google Scholar] [CrossRef]
- Zou, L.; Kikuta, K.; Alani, A.M.; Sato, M. Study on Wavelet Entropy for Airport Pavement Inspection using a Multi-Static GPR System. Geophysics 2021, 86, WA69–WA78. [Google Scholar] [CrossRef]
- Tong, Z.; Gao, J.; Yuan, D. Advances of deep learning applications in ground-penetrating radar: A survey. Constr. Build. Mater. 2020, 258, 120371. [Google Scholar] [CrossRef]
- Li, S.; Gu, X.; Xu, X.; Xu, D.; Zhang, T.; Liu, Z.; Dong, Q. Detection of concealed cracks from ground penetrating radar images based on deep learning algorithm. Constr. Build. Mater. 2021, 273, 121949. [Google Scholar] [CrossRef]
- Liu, H.; Lin, C.; Cui, J.; Fan, L.; Xie, X.; Spencer, B.F. Detection and localization of rebar in concrete by deep learning using ground penetrating radar. Autom. Constr. 2020, 118, 103279. [Google Scholar] [CrossRef]
- Dai, Q.; Lee, Y.H.; Sun, H.H.; Ow, G.; Yusof, M.L.M.; Yucel, A.C. 3DInvNet: A deep learning-based 3D ground-penetrating radar data inversion. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–16. [Google Scholar] [CrossRef]
- Wang, H.; Ouyang, S.; Liu, Q.; Liao, K.; Zhou, L. Deep-learning-based method for estimating permittivity of ground-penetrating radar targets. Remote Sens. 2022, 14, 4293. [Google Scholar] [CrossRef]
- Li, Y.; Liu, C.; Yue, G.; Gao, Q.; Du, Y. Deep learning-based pavement subsurface distress detection via ground penetrating radar data. Autom. Constr. 2022, 142, 104516. [Google Scholar] [CrossRef]
- Li, Z.; Zeng, Z.; Xiong, H.; Lu, Q.; An, B.; Yan, J.; Li, R.; Xia, L.; Wang, H.; Liu, K. Study on rapid inversion of soil water content from ground-penetrating radar data based on deep learning. Remote Sens. 2023, 15, 1906. [Google Scholar] [CrossRef]
- Xie, L.; Zhao, Q.; Ma, C.; Liao, B.; Huo, J. Ü-Net: Deep-learning schemes for ground penetrating radar data inversion. J. Environ. Eng. Geophys. 2020, 25, 287–292. [Google Scholar] [CrossRef]
- Giannakis, I.; Giannopoulos, A.; Warren, C. A machine learning scheme for estimating the diameter of reinforcing bars using ground penetrating radar. IEEE Geosci. Remote Sens. Lett. 2020, 18, 461–465. [Google Scholar] [CrossRef]
- Zou, L.; Yi, L.; Sato, M. On the use of lateral wave for the interlayer debonding detecting in an asphalt airport pavement using a multistatic GPR system. IEEE Trans. Geosci. Remote Sens. 2020, 58, 4215–4224. [Google Scholar] [CrossRef]
- Giannakis, I.; Giannopoulos, A.; Warren, C. A machine learning-based fast-forward solver for ground penetrating radar with application to full-waveform inversion. IEEE Trans. Geosci. Remote Sens. 2019, 57, 4417–4426. [Google Scholar] [CrossRef]
- Lu, G.; Kou, L.; Niu, P.; Lv, G.; Zhang, X.; Liu, J.; Xie, Q. GPRTransNet: A deep learning–based ground-penetrating radar translation network. Tunn. Undergr. Space Technol. 2025, 161, 106557. [Google Scholar] [CrossRef]
- Hu, H.; Fang, H.; Wang, N.; Liu, H.; Lei, J.; Ma, D.; Dong, J. A study of automatic recognition and localization of pipeline for ground penetrating radar based on deep learning. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Ji, Y.; Zhang, F.; Wang, J.; Wang, Z.; Jiang, P.; Liu, H.; Sui, Q. Deep neural network-based permittivity inversions for ground penetrating radar data. IEEE Sens. J. 2021, 21, 8172–8183. [Google Scholar]
- Hu, H.; Fang, H.; Wang, N.; Ma, D.; Dong, J.; Li, B.; Di, D.; Zheng, H.; Wu, J. Defects identification and location of underground space for ground penetrating radar based on deep learning. Tunn. Undergr. Space Technol. 2023, 140, 105278. [Google Scholar] [CrossRef]
- Yang, J.; Ruan, K.; Gao, J.; Yang, S.; Zhang, L. Pavement distress detection using three-dimension ground penetrating radar and deep learning. Appl. Sci. 2022, 12, 5738. [Google Scholar] [CrossRef]
- Bai, X.; Yang, Y.; Wei, S.; Chen, G.; Li, H.; Li, Y.; Tian, H.; Zhang, T.; Cui, H. A comprehensive review of conventional and deep learning approaches for ground-penetrating radar detection of raw data. Appl. Sci. 2023, 13, 7992. [Google Scholar] [CrossRef]
- Zhang, X.; Han, L.; Robinson, M.; Gallagher, A. A GANs-based deep learning framework for automatic subsurface object recognition from ground penetrating radar data. IEEE Access 2021, 9, 39009–39018. [Google Scholar] [CrossRef]
- Gao, R.; Zhu, H.; Liao, Q.; Qu, B.; Hu, L.; Wang, H. Detection of coal fire by deep learning using ground penetrating radar. Measurement 2022, 201, 111585. [Google Scholar] [CrossRef]
- Li, X.; Liu, H.; Zhou, F.; Chen, Z.; Giannakis, I.; Slob, E. Deep learning–based nondestructive evaluation of reinforcement bars using ground-penetrating radar and electromagnetic induction data. Comput. Aided Civ. Infrastruct. Eng. 2022, 37, 1834–1853. [Google Scholar] [CrossRef]
- Xu, H.; Yan, J.; Feng, G.; Jia, Z.; Jing, P. Rock layer classification and identification in ground-penetrating radar via machine learning. Remote Sens. 2024, 16, 1310. [Google Scholar] [CrossRef]
- Liu, B.; Ren, Y.; Liu, H.; Xu, H.; Wang, Z.; Cohn, A.G.; Jiang, P. GPRInvNet: Deep learning-based ground-penetrating radar data inversion for tunnel linings. IEEE Trans. Geosci. Remote Sens. 2021, 59, 8305–8325. [Google Scholar] [CrossRef]
- Gao, J.; Yuan, D.; Tong, Z.; Yang, J.; Yu, D. Autonomous pavement distress detection using ground penetrating radar and region-based deep learning. Measurement 2020, 164, 108077. [Google Scholar] [CrossRef]
- Wang, J.; Liu, H.; Jiang, P.; Wang, Z.; Sui, Q.; Zhang, F. GPRI2Net: A deep-neural-network-based ground penetrating radar data inversion and object identification framework for consecutive and long survey lines. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–20. [Google Scholar] [CrossRef]
- Wickramanayake, S.; Thiyagarajan, K.; Kodagoda, S. Deep learning for estimating low-range concrete sub-surface boundary depths using ground penetrating radar signals. IEEE Sens. Lett. 2022, 6, 1–4. [Google Scholar] [CrossRef]
- Liu, P.; Ding, Z.; Zhang, W.; Ren, Z.; Yang, X. Using ground-penetrating radar and deep learning to rapidly detect voids and rebar defects in linings. Sustainability 2023, 15, 11855. [Google Scholar] [CrossRef]
- Zou, L.; Tosti, F.; Alani, A.M. Nondestructive inspection of tree trunks using a dual-polarized ground-penetrating radar system. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5917108. [Google Scholar] [CrossRef]
- Xiong, X.; Meng, A.; Lu, J.; Tan, Y.; Chen, B.; Tang, J.; Zhang, C.; Xiao, S.; Hu, J. Automatic detection and location of pavement internal distresses from ground penetrating radar images based on deep learning. Constr. Build. Mater. 2024, 411, 134483. [Google Scholar] [CrossRef]
- Kang, M.S.; Kim, N.; Lee, J.J.; An, Y.K. Deep learning-based automated underground cavity detection using three-dimensional ground penetrating radar. Struct. Health Monit. 2020, 19, 173–185. [Google Scholar] [CrossRef]
- Leong, Z.X.; Zhu, T. Direct velocity inversion of ground penetrating radar data using GPRNet. J. Geophys. Res. Solid Earth 2021, 126, e2020JB021047. [Google Scholar] [CrossRef]
- Gao, K.; Donahue, C.; Henderson, B.G.; Modrak, R.T. Deep-learning-guided high-resolution subsurface reflectivity imaging with application to ground-penetrating radar data. Geophys. J. Int. 2023, 233, 448–471. [Google Scholar] [CrossRef]
- Roncoroni, G.; Forte, E.; Santin, I.; Pipan, M. Deep learning-based multifrequency ground penetrating radar data merging. Geophysics 2024, 89, F1–F9. [Google Scholar] [CrossRef]
- Han, H.; Wang, Y.; Zheng, Y. Permittivity inversion of ground penetrating radar by attention-based deep learning. IEEE Geosci. Remote Sens. Lett. 2024, 21, 1–5. [Google Scholar] [CrossRef]
- Cao, Q.; Al-Qadi, I.L.; Abufares, L. Pavement moisture content prediction: A deep residual neural network approach for analyzing ground penetrating radar. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–11. [Google Scholar] [CrossRef]
- Zhang, Y.C.; Yi, T.H.; Lin, S.; Li, H.N.; Lv, S. Automatic corrosive environment detection of RC bridge decks from ground-penetrating radar data based on deep learning. J. Perform. Constr. Facil. 2022, 36, 04022011. [Google Scholar] [CrossRef]
- Jin, Y.; Duan, Y. Wavelet scattering network-based machine learning for ground penetrating radar imaging: Application in pipeline identification. Remote Sens. 2020, 12, 3655. [Google Scholar] [CrossRef]
- Zhou, Z.; Huang, M.; Xu, H.; Yang, X.; Li, Y.; Jia, Z. Deep Learning-Based Interpolation for Ground Penetrating Radar Data Reconstruction. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2025, 18, 6329–6335. [Google Scholar] [CrossRef]
- Niu, F.; Huang, Y.; He, P.; Su, W.; Jiao, C.; Ren, L. Intelligent recognition of ground penetrating radar images in urban road detection: A deep learning approach. J. Civ. Struct. Health Monit. 2024, 14, 1917–1933. [Google Scholar] [CrossRef]
- Hu, M.; Liu, X.; Lu, Q.; Liu, S. Two-stage Denoising of Ground Penetrating Radar Data based on Deep Learning. IEEE Geosci. Remote Sens. Lett. 2024, 21, 1–5. [Google Scholar] [CrossRef]
- Khudoyarov, S.; Kim, N.; Lee, J.J. Three-dimensional convolutional neural network–based underground object classification using three-dimensional ground penetrating radar data. Struct. Health Monit. 2020, 19, 1884–1893. [Google Scholar] [CrossRef]
- Liu, H.; Wang, J.; Zhang, J.; Jiang, H.; Xu, J.; Jiang, P.; Zhang, F.; Sui, Q.; Wang, Z. Semisupervised deep neural network-based cross-frequency ground-penetrating radar data inversion. IEEE Trans. Geosci. Remote Sens. 2023, 61, 1–19. [Google Scholar] [CrossRef]
- Liu, B.; Zhang, J.; Lei, M.; Yang, S.; Wang, Z. Simultaneous tunnel defects and lining thickness identification based on multi-tasks deep neural network from ground penetrating radar images. Autom. Constr. 2023, 145, 104633. [Google Scholar] [CrossRef]
- Zou, L.; Feng, X.; Liu, H.; Alani, A.M.; Liu, C. Trunk health condition inspection using integrated 3D photogrammetry and holographic radar tomography. IEEE Trans. Geosci. Remote Sens. 2025, 63, 1–11. [Google Scholar] [CrossRef]
- Zou, L.; Wang, Y.; Giannakis, I.; Tosti, F.; Alani, A.M.; Sato, M. Mapping and Assessment of Tree Roots Using Ground Penetrating Radar with Low-Cost GPS. Remote Sens. 2020, 12, 1300. [Google Scholar] [CrossRef]
- Wang, H.; Liu, Q.; Zhou, L. Underground target localization method for ground penetrating radar based on deep learning. Measurement 2025, 253, 117647. [Google Scholar] [CrossRef]
- Torbali, M.E.; Zolotas, A.; Avdelidis, N.P. A state-of-the-art review of non-destructive testing image fusion and critical insights on the inspection of aerospace composites towards sustainable maintenance repair operations. Appl. Sci. 2023, 13, 2732. [Google Scholar] [CrossRef]
- Bergen, K.J.; Johnson, P.A.; de Hoop, M.V.; Beroza, G.C. Machine learning for data-driven discovery in solid Earth geoscience. Science 2019, 363, eaau0323. [Google Scholar] [CrossRef] [PubMed]
- Imai, T.; Mizutani, T.; Iguchi, T.; Haneda, T. Enhancing Deep Learning-Based GPR Data Inversion with Unsupervised Domain Adaptation: Comparison of Domain Classifiers. IEEE Trans. Geosci. Remote Sens. 2025, 63, 1–16. [Google Scholar] [CrossRef]
- Luo, T.X.; Zhou, Y.; Zheng, Q.; Hou, F.; Lin, C. Lightweight deep learning model for identifying tunnel lining defects based on GPR data. Autom. Constr. 2024, 165, 105506. [Google Scholar] [CrossRef]
- Xu, T.; Yuan, D.; Yang, G.; Li, B.; Fan, D. FM-GAN: Forward modeling network for generating approaching-reality B-scans of GPR pipelines with transformer tuning. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–13. [Google Scholar] [CrossRef]
- Zhang, X.; Zhao, X.; Lv, S.; Xv, L.; Lin, C.; Wen, J. Deep Learning Inversion of Ground Penetrating Radar with Prior Physical Velocity Field for Complex Subsurface Root System. IEEE Trans. Geosci. Remote Sens. 2025, 63, 1–15. [Google Scholar] [CrossRef]
- Liu, W.; Sun, F.; Zhao, H. A Deep Learning-Based Method for Attenuation Compensation in Ground-Penetrating Radar. IEEE Geosci. Remote Sens. Lett. 2025, 22, 1–5. [Google Scholar] [CrossRef]
- Moalla, M.; Frigui, H.; Karem, A.; Bouzid, A. Application of convolutional and recurrent neural networks for buried threat detection using ground penetrating radar data. IEEE Trans. Geosci. Remote Sens. 2020, 58, 7022–7034. [Google Scholar] [CrossRef]
- Li, X.; Cheng, X.; Zhao, Y.; Xiang, B.; Zhang, T. Deep Learning-Based Ground-Penetrating Radar Inversion for Tree Roots in Heterogeneous Soil. Sensors 2025, 25, 947. [Google Scholar] [CrossRef]
- Tong, Z.; Yuan, D.; Gao, J.; Wei, Y.; Dou, H. Pavement-distress detection using ground-penetrating radar and network in networks. Constr. Build. Mater. 2020, 233, 117352. [Google Scholar] [CrossRef]
- Liu, C.; Du, Y.; Yue, G.; Li, Y.; Wu, D.; Li, F. Advances in automatic identification of road subsurface distress using ground penetrating radar: State of the art and future trends. Autom. Constr. 2024, 158, 105185. [Google Scholar] [CrossRef]
- Vahidi, M.; Shafian, S.; Frame, W.H. Multi-depth soil moisture estimation via 1D convolutional neural networks from drone-mounted ground penetrating Radar data. Comput. Electron. Agric. 2025, 232, 110104. [Google Scholar] [CrossRef]
- Zou, L.; Liu, H.; Alani, A.M.; Fang, G. Surface Permittivity Estimation of Southern Utopia Planitia by High-Frequency RoPeR in Tianwen-1 Mars Exploration. IEEE Trans. Geosci. Remote Sens. 2024, 62, 1–9. [Google Scholar] [CrossRef]
- Xiong, H.; Li, J.; Li, Z.; Zhang, Z. GPR-GAN: A ground-penetrating radar data generative adversarial network. IEEE Trans. Geosci. Remote Sens. 2023, 62, 1–14. [Google Scholar] [CrossRef]
- Dai, Q.; Lee, Y.H.; Sun, H.H.; Qian, J.; Ow, G.; Yusof, M.L.M.; Yucel, A.C. A deep learning-based GPR forward solver for predicting B-scans of subsurface objects. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Feng, D.; Liu, Y.; Zhang, B.; Wang, X. Special Issue on Ground Penetrating Radar: Theory, Methods, and Applications. Appl. Sci. 2023, 13, 9847. [Google Scholar] [CrossRef]
- Williams, R.M.; Ray, L.E.; Lever, J.H.; Burzynski, A.M. Crevasse detection in ice sheets using ground penetrating radar and machine learning. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 4836–4848. [Google Scholar] [CrossRef]
- Huang, M.; Liang, J.; Zhou, Z.; Li, X.; Huo, Z.; Jia, Z. Enhanced ground-penetrating radar inversion with closed-loop convolutional neural networks. IEEE Geosci. Remote Sens. Lett. 2024, 22, 1–5. [Google Scholar] [CrossRef]
- Wang, Z.; Jiang, H.; Wang, W.; Xu, J.; Sui, Q.; Gao, S.; Wang, J. A Semisupervised Deep Learning Method for Ground Penetrating Radar Data Inversion and Concrete Subsurface Defect Imaging. IEEE Trans. Geosci. Remote Sens. 2025, 63, 1–11. [Google Scholar] [CrossRef]
- Bi, B.; Shen, L.; Zhang, P.; Huang, X.; Xin, Q.; Jin, T. TSVR-net: An end-to-end ground-penetrating radar images registration and location network. Remote Sens. 2023, 15, 3428. [Google Scholar] [CrossRef]
- Lin, Y.; Wang, J.; Ma, D.; Wang, Y.; Ye, S. Improved Cycle-Consistency Generative Adversarial Network-Based Clutter Suppression Methods for Ground-Penetrating Radar Pipeline Data. Remote Sens. 2024, 16, 1043. [Google Scholar] [CrossRef]
- Kumar, A.; Singh, U.K.; Pradhan, B. Enhancing Interpretability in Deep Learning-Based Inversion of 2D Ground Penetrating Radar Data: An Explainable AI (XAI) Strategy. IEEE Geosci. Remote Sens. Lett. 2024, 21, 1–5. [Google Scholar]
- Liang, X.; Yu, X.; Chen, C.; Jin, Y.; Huang, J. Automatic classification of pavement distress using 3D ground-penetrating radar and deep convolutional neural network. IEEE Trans. Intell. Transp. Syst. 2022, 23, 22269–22277. [Google Scholar] [CrossRef]
- Temlioglu, E.; Erer, I. A novel convolutional autoencoder-based clutter removal method for buried threat detection in ground-penetrating radar. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–13. [Google Scholar] [CrossRef]
- Kuchipudi, S.T.; Ghosh, D.; Gupta, H. Automated assessment of reinforced concrete elements using ground penetrating radar. Autom. Constr. 2022, 140, 104378. [Google Scholar] [CrossRef]
- Zheng, X.; Fang, S.; Chen, H.; Peng, L.; Ye, Z. Internal detection of ground-penetrating radar images using YOLOX-s with modified backbone. Electronics. 2023, 12, 3520. [Google Scholar] [CrossRef]
- Su, Y.; Wang, J.; Li, D.; Wang, X.; Hu, L.; Yao, Y.; Kang, Y. End-to-end deep learning model for underground utilities localization using GPR. Autom. Constr. 2023, 149, 104776. [Google Scholar] [CrossRef]
- Chun, P.J.; Suzuki, M.; Kato, Y. Iterative application of generative adversarial networks for improved buried pipe detection from images obtained by ground-penetrating radar. Comput. Aided Civ. Infrastruct. Eng. 2023, 38, 2472–2490. [Google Scholar] [CrossRef]
- Tian, H.; Bai, X.; Zhu, X.; Arun, P.V.; Mi, J.; Zhao, D. CIGGAN: A Ground Penetrating Radar Image Generation Method based on Feature Fusion. IEEE Trans. Geosci. Remote Sens. 2025, 63, 1–18. [Google Scholar] [CrossRef]
- Jafuno, D.; Mian, A.; Ginolhac, G.; Stelzenmuller, N. Classification of Buried Objects from Ground Penetrating Radar Images by using Second Order Deep Learning Models. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2025, 18, 3185–3197. [Google Scholar] [CrossRef]
- Kumar, A.; Singh, U.K.; Pradhan, B. Ground penetrating radar in coastal hazard mitigation studies using deep convolutional neural networks. Remote Sens. 2022, 14, 4899. [Google Scholar] [CrossRef]
- Faris, N.; Zayed, T.; Fares, A.; Abdelkhalek, S.; Abdelkader, E.M. Automated rebar recognition and corrosion assessment of concrete bridge decks using ground penetrating radar. Autom. Constr. 2024, 166, 105631. [Google Scholar] [CrossRef]
- Liu-Schiaffini, M.; Ng, G.; Grima, C.; Young, D. Ice thickness from deep learning and conditional random fields: Application to ice-penetrating radar data with radiometric validation. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–14. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, W.; Lv, S.; Yu, J.; Ge, D.; Guo, J.; Li, L. YOLOv11-CAFM model in ground penetrating radar image for pavement distress detection and optimization study. Constr. Build. Mater. 2025, 485, 141907. [Google Scholar] [CrossRef]
- Wang, S.; Gong, X.; Han, L. Monte Carlo full-waveform inversion of cross-hole ground-penetrating radar data based on improved residual network. Remote Sens. 2024, 16, 243. [Google Scholar] [CrossRef]
- Lv, S.; Wen, J.; Zhang, X. MPPINet: Multi-Path Permittivity Inversion Network for Tree Roots Ground Penetrating Radar Image Recognition. IEEE Trans. Instrum. Meas. 2024, 73, 1–14. [Google Scholar] [CrossRef]
- Chen, D.; Wang, M.; Wu, W.; Ji, D.; Zhao, B.; Liu, X.; Cui, X.; Liu, Y. Siam-Gabor-ResNet Used for Crevasse Detection with Ground Penetrating Radar Data. IEEE Trans. Geosci. Remote Sens. 2025, 63, 1–13. [Google Scholar] [CrossRef]
- Xue, W.; Li, T.; Peng, J.; Liu, L.; Zhang, J. Road underground defect detection in ground penetrating radar images based on an improved YOLOv5s model. J. Appl. Geophys. 2024, 229, 105491. [Google Scholar] [CrossRef]
- Liu, N.; Ge, Y.; Bai, X.; Zhang, Z.; Shangguan, Y.; Li, Y. Research on Damage Detection Methods for Concrete Beams Based on Ground Penetrating Radar and Convolutional Neural Networks. Appl. Sci. 2025, 15, 1882. [Google Scholar] [CrossRef]
Figure 1.
Heatmap of evaluation metric frequencies from GPR + AI studies (2021–2025). The data were primarily sourced from the Web of Science database, using combinations of relevant keywords (e.g., “GPR,” “AI,” “deep learning,” “object detection,”).
Figure 1.
Heatmap of evaluation metric frequencies from GPR + AI studies (2021–2025). The data were primarily sourced from the Web of Science database, using combinations of relevant keywords (e.g., “GPR,” “AI,” “deep learning,” “object detection,”).
Figure 2.
Data-to-decision pipeline using DL: (a) flowchart of applying DL in GPR reflection; (b) GPR image labeling and recognition with DL.
Figure 2.
Data-to-decision pipeline using DL: (a) flowchart of applying DL in GPR reflection; (b) GPR image labeling and recognition with DL.
Figure 3.
Overview of hybrid pipeline combining physics-based simulation with deep learning. Simulated GPR data generated from known subsurface models is used to train or fine-tune deep learning models. These models then generalize to real GPR data for tasks such as object detection, layer segmentation, or anomaly classification. This approach leverages interpretability of physical modeling and predictive power of AI.
Figure 3.
Overview of hybrid pipeline combining physics-based simulation with deep learning. Simulated GPR data generated from known subsurface models is used to train or fine-tune deep learning models. These models then generalize to real GPR data for tasks such as object detection, layer segmentation, or anomaly classification. This approach leverages interpretability of physical modeling and predictive power of AI.
Figure 4.
Model architecture comparison: CNN (classification), U-Net (segmentation), and YOLO (object detection) adapted for GPR applications. Each architecture follows a distinct design tailored to specific tasks: CNNs classify patterns (e.g., hyperbolas) in B-scans, U-Net performs pixel-wise segmentation of subsurface features, and YOLO detects and localizes objects by predicting bounding boxes and class labels in a single pass.
Figure 4.
Model architecture comparison: CNN (classification), U-Net (segmentation), and YOLO (object detection) adapted for GPR applications. Each architecture follows a distinct design tailored to specific tasks: CNNs classify patterns (e.g., hyperbolas) in B-scans, U-Net performs pixel-wise segmentation of subsurface features, and YOLO detects and localizes objects by predicting bounding boxes and class labels in a single pass.
Figure 5.
Conceptual multimodal fusion framework integrating GPR, RGB, and thermal data for infrastructure assessment. This framework illustrates how complementary sensing modalities—GPR for subsurface profiling, RGB imaging for surface-level inspection, and thermal data for temperature anomalies—can be integrated using AI models to enhance the reliability and accuracy of infrastructure condition assessment.
Figure 5.
Conceptual multimodal fusion framework integrating GPR, RGB, and thermal data for infrastructure assessment. This framework illustrates how complementary sensing modalities—GPR for subsurface profiling, RGB imaging for surface-level inspection, and thermal data for temperature anomalies—can be integrated using AI models to enhance the reliability and accuracy of infrastructure condition assessment.
Figure 6.
Best practice pipeline for developing an AI-GPR model (from data collection to validation).
Figure 6.
Best practice pipeline for developing an AI-GPR model (from data collection to validation).
Table 1.
Comparison of rule-based versus classic machine learning.
Table 1.
Comparison of rule-based versus classic machine learning.
| Criteria | Rule-Based Systems | Classic ML |
|---|
| Interpretability | High | Moderate |
| Accuracy | Low | Moderate-High |
| Adaptability | Low | Moderate |
| Data requirements | Low | Moderate |
Table 2.
Summary of Pretrained Models used in GPR Interpretation.
Table 2.
Summary of Pretrained Models used in GPR Interpretation.
| Model | Source Domain | Target Task | Performance Improvement |
|---|
| ResNet | ImageNet | Feature Extraction | 10% F1 gain |
| VGG16 | ImageNet | Hyperbola Detection | 8% F1 gain |
| U-Net | Medical Images | Segmentation | 12% IoU gain |
| YOLOv5 | COCO | Object Detection | 15% Precision gain |
Table 3.
Traditional Machine Learning Algorithms used with GPR.
Table 3.
Traditional Machine Learning Algorithms used with GPR.
| Algorithm | Input Features | Typical Application | Advantages | Limitations |
|---|
| SVM | Hyperbola shape descriptors | Target detection | High precision | Sensitive to noise |
| Random forest | Statistical feature vectors | Material classification | Robust to overfitting | Requires parameter tuning |
| KNN | Distance-based metrics | Clustering | Conceptually simple | Low accuracy on complex data |
| Naive Bayes | Intensity-based statistics | Anomaly detection | Fast and lightweight | Poor generalization ability |
Table 4.
Overview of hybrid and multimodal GPR models.
Table 4.
Overview of hybrid and multimodal GPR models.
| Model | Fusion Type | Sensors Used | Observed Benefits |
|---|
| gprMax + CNN | Physics + DL | Simulated GPR | Improved realism |
| GPR + RGB Fusion | Sensor-level | GPR + Camera | Better localization |
| PINN − GPR | Equation-informed | GPR | Physics-consistent results |
Table 5.
AI-GPR applications in field robotics.
Table 5.
AI-GPR applications in field robotics.
| Platform | Sensors Used | AI Model | Task | Deployment Scenario |
|---|
| UAV | GPR + GNSS | Lightweight CNN | Subsurface mapping | Minefields, agriculture |
| Ground Rover | GPR + LiDAR | U-Net | Pipe and rebar detection | Construction, inspection |
| Handheld Scanner | GPR | ResNet classifier | Target detection | Archaeological survey |
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}