
xLSTM-Based Urban Traffic Flow Prediction for Intelligent Transportation Governance


Abstract
1. Introduction
- Proposing an xLSTM-based traffic forecasting model with matrix-based memory and exponential gating.
- Achieving 87.3% accuracy with 41.2 ms inference latency for real-time applications.
- Integrating the forecasting system into proactive police dispatch workflows.
- Developing a scalable, edge-deployable system architecture for smart city governance.
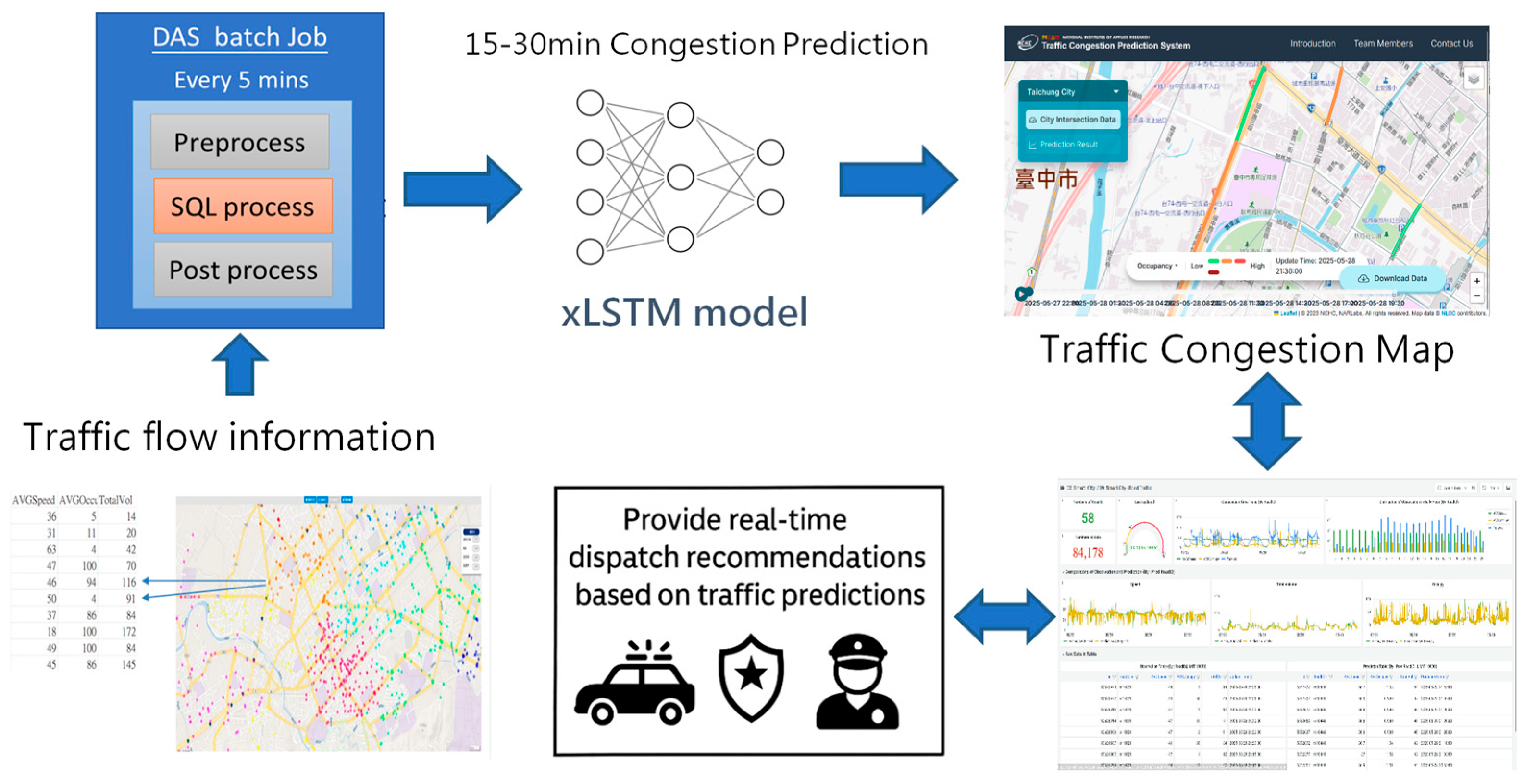
2. Materials and Methods
2.1. Data Collection and Preprocessing
2.2. xLSTM Model Architecture and Training [8]
3. Results
3.1. Performance Evaluation
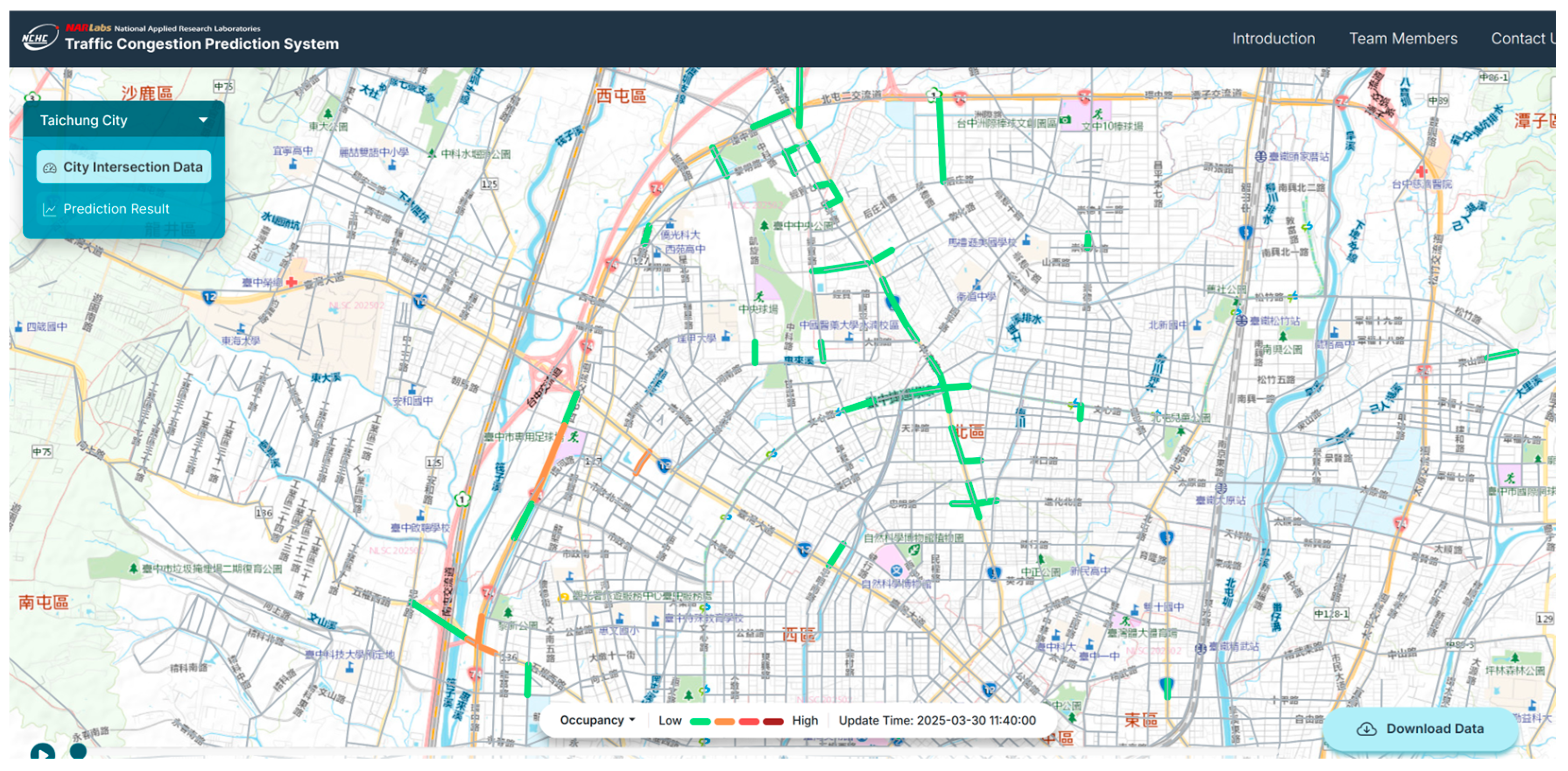
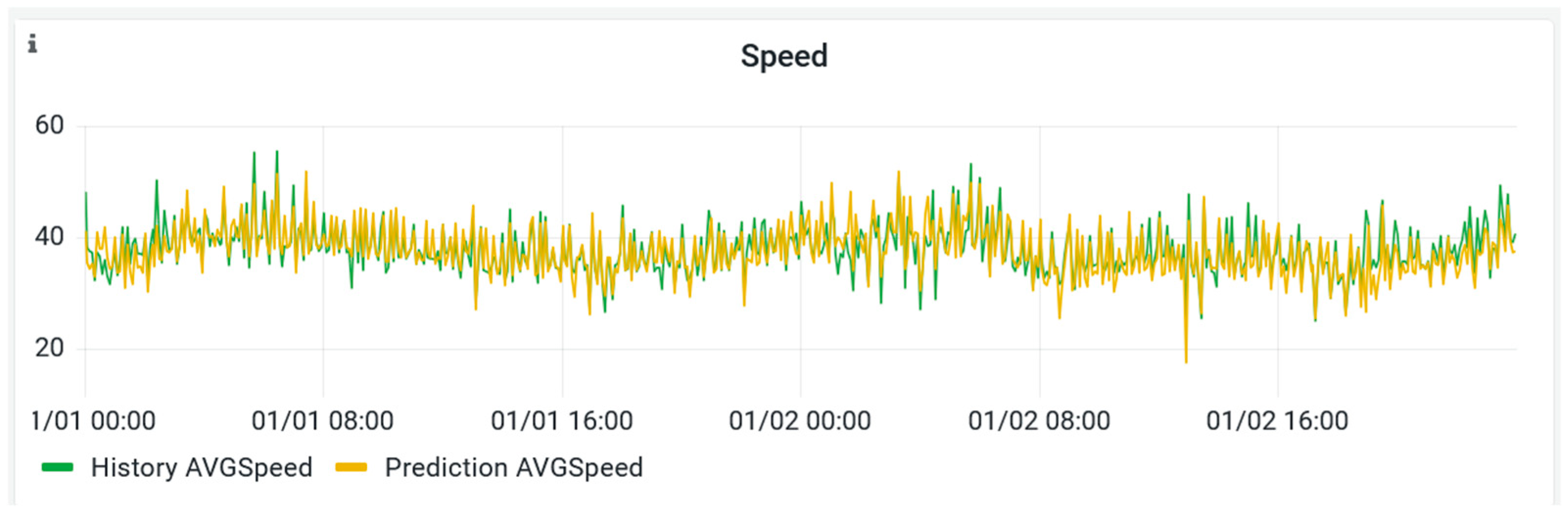
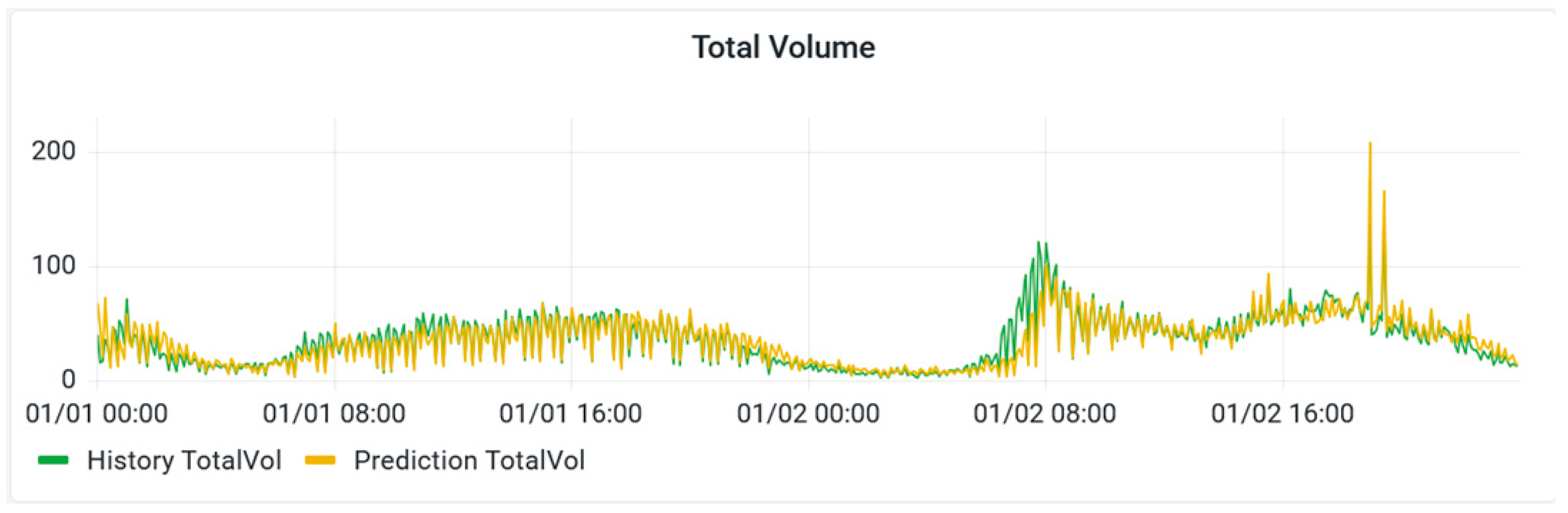
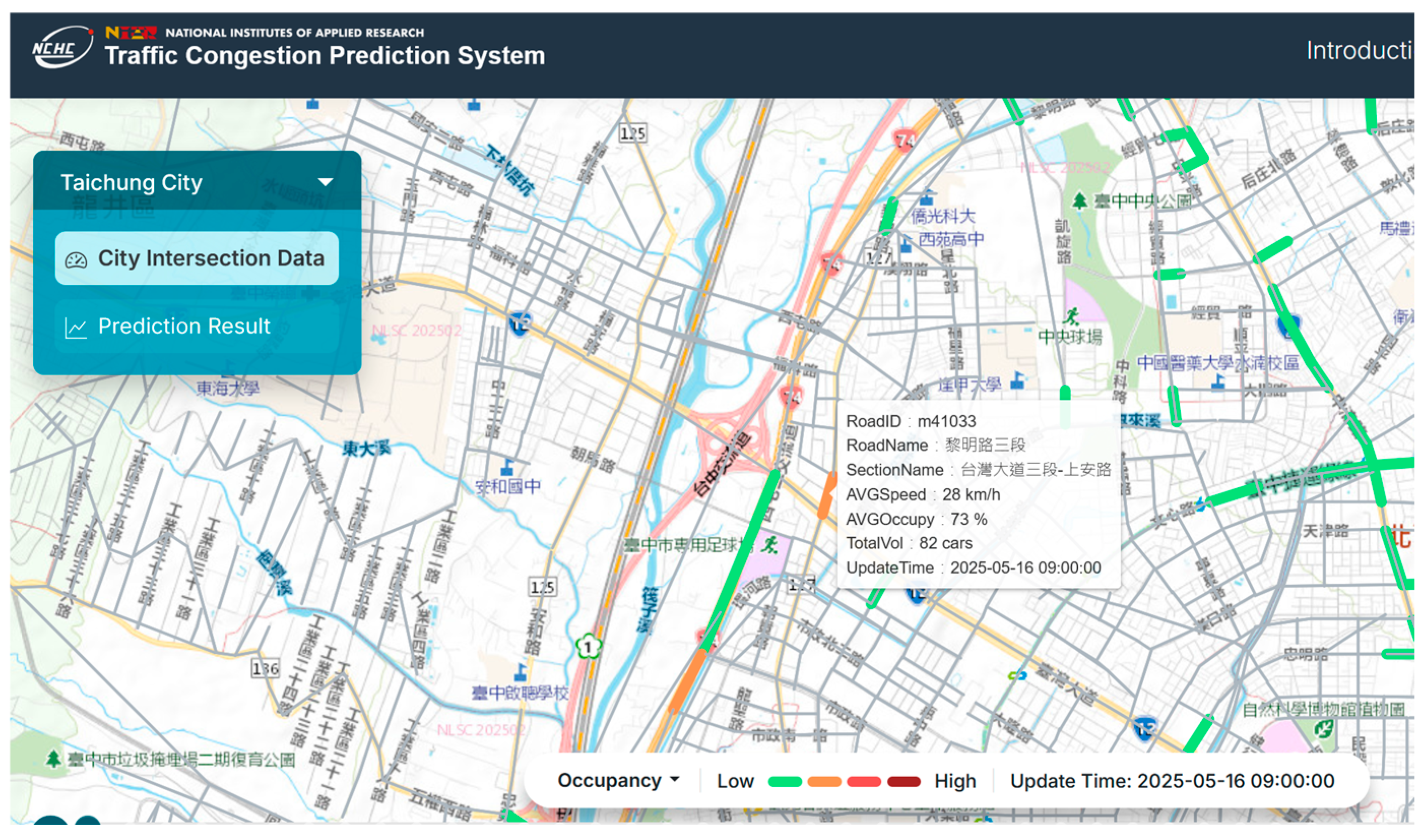
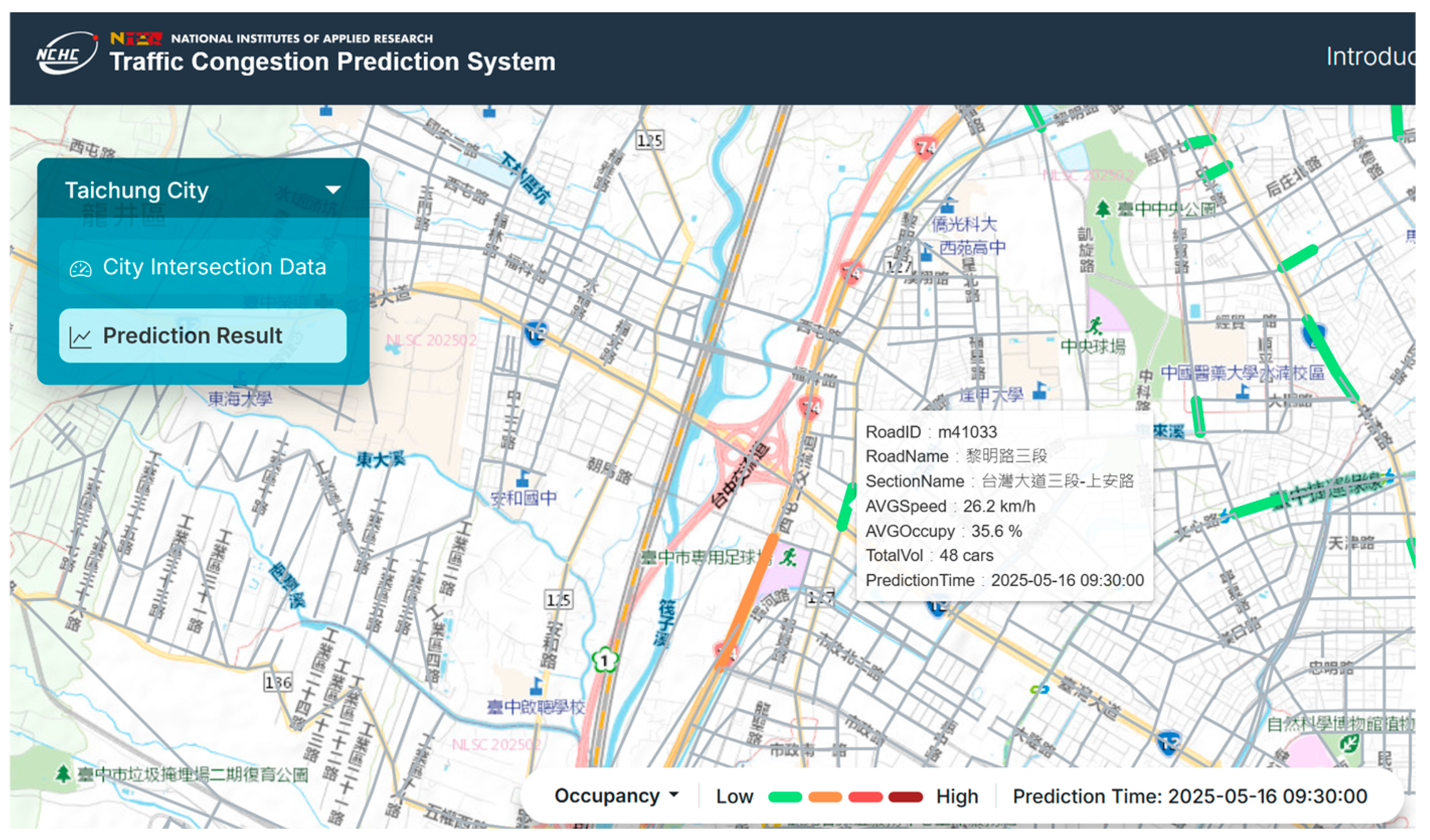
3.2. Case Study: Real-Time Congestion Prediction and Police Deployment
Real-Time Forecasting Scenario
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Abbreviation | Full Term |
| xLSTM | Extended Long Short-Term Memory |
| VD | Vehicle Detector |
| MAE | Mean Absolute Error |
| RMSE | Root Mean Square Error |
| ITS | Intelligent Transportation Systems |
| GRU | Gated Recurrent Unit |
| RNN | Recurrent Neural Network |
| GNN | Graph Neural Network |
| CCTV | Closed-Circuit Television |
| DPI | Dots Per Inch |
References
- Feng, J.; Li, Y.; Zhang, C.; Sun, F.; Meng, F.; Gui, A.; Jin, D. DeepMove: Predicting human mobility with attentional recurrent networks. In Proceedings of the 29th International World Wide Web Conference (WWW 2018), Lyon, France, 23–27 April 2018; pp. 1459–1468. [Google Scholar] [CrossRef]
- Zhao, L.; Song, Y.; Zhang, C.; Liu, Y.; Wang, P.; Lin, T.; Pei, J. T-GCN: A temporal graph convolutional network for traffic prediction. IEEE Trans. Intell. Transp. Syst. 2020, 21, 3848–3858. [Google Scholar] [CrossRef]
- Zhang, H.; Xie, Q.; Shou, Z.; Gao, Y. Dynamic Spatial–Temporal Memory Augmentation Network for Traffic Prediction. Sensors 2024, 24, 6659. [Google Scholar] [CrossRef] [PubMed]
- Li, M.; Abdel-Aty, M. Real-Time Crash Likelihood Prediction Using Temporal Attention–Based Deep Learning and Trajectory Fusion. J. Transp.Eng. Part A Syst. 2022, 148, 04022043. [Google Scholar] [CrossRef]
- Chen, X.; Chen, H.; Yang, Y.; Wu, H.; Zhang, W.; Zhao, J.; Xiong, Y. Traffic Flow Prediction by an Ensemble Framework with Data Denoising and Deep Learning Model. Phys. A Stat. Mech. Its Appl. 2021, 565, 125574. [Google Scholar] [CrossRef]
- Guo, S.; Lin, Y.; Feng, N.; Song, C.; Wan, H. Attention-based spatial-temporal graph convolutional networks for traffic flow forecasting. In Proceedings of the AAAI Conference on Artificial Intelligence (AAAI 2019), Honolulu, HI, USA, 27 January–1 February 2019; pp. 922–929. [Google Scholar] [CrossRef]
- Sharma, A.; Sharma, A.; Nikashina, P.; Gavrilenko, V.; Tselykh, A.; Bozhenyuk, A.; Masud, M.; Meshref, H. A Graph Neural Network (GNN)-Based Approach for Real-Time Estimation of Traffic Speed in Sustainable Smart Cities. Sustainability 2023, 15, 11893. [Google Scholar] [CrossRef]
- Beck, M.; Pöppel, K.; Spanring, M.; Auer, A.; Prudnikova, O.; Kopp, M.; Klambauer, G.; Brandstetter, J.; Hochreiter, S. xLSTM: Extended long short-term memory. In Proceedings of the 38th Conference on Neural Information Processing Systems (NeurIPS 2024), Vancouver, BC, Canada, 9–15 December 2024. [Google Scholar]
- Wang, D.; Yang, H.; Zhou, H. Dynamic Spatial–Temporal Self-Attention Network for Traffic Flow Prediction. Future Internet 2024, 16, 189. [Google Scholar] [CrossRef]
- Song, C.; Lin, Y.; Guo, S.; Wan, H. Spatial-Temporal Synchronous Graph Convolutional Networks: A New Framework for Spatial-Temporal Network Data Forecasting. Proc. AAAI Conf. Artif. Intell. 2020, 34, 914–921. [Google Scholar] [CrossRef]
- Liu, L.; Cao, Y.; Dong, Y. Attention-Based Multiple Graph Convolutional Recurrent Network for Traffic Forecasting. Sustainability 2023, 15, 4697. [Google Scholar] [CrossRef]
- Zheng, Z.; Zhou, Y.; Sun, Y.; Wang, Z.; Liu, B.; Li, K. Applications of Federated Learning in Smart Cities: Recent Advances, Taxonomy, and Open Challenges. Connect. Sci. 2022, 34, 1–28. [Google Scholar] [CrossRef]
- Jiang, J.; Han, C.; Zhao, W.X.; Wang, J. PDFormer: Propagation Delay-Aware Dynamic Long-Range Transformer for Traffic Flow Prediction. In Proceedings of the AAAI Conference on Artificial Intelligence, Washington, DC, USA, 7–14 February 2023; pp. 4365–4373. [Google Scholar]
- Jiang, M.; Liu, Z. Traffic Flow Prediction Based on Dynamic Graph Spatial-Temporal Neural Network. Mathematics 2023, 11, 2528. [Google Scholar] [CrossRef]
- Tomasiello, D.B.; Giannotti, M.; Feitosa, F.F. ACCESS: An agent-based model to explore job accessibility inequalities. Comput. Environ. Urban Syst. 2020, 81, 101462. [Google Scholar] [CrossRef]
- Kostopoulos, G.; Davrazos, G.; Kotsiantis, S. Explainable Artificial Intelligence-Based Decision Support Systems: A Recent Review. Electronics 2024, 13, 2842. [Google Scholar] [CrossRef]
- Zhang, J.; Zheng, Y.; Qi, D. Deep spatio-temporal residual networks for citywide crowd flows prediction. In Proceedings of the AAAI Conference on Artificial Intelligence (AAAI 2017), San Francisco, CA, USA, 4–9 February 2017; pp. 1655–1661. [Google Scholar] [CrossRef]
- Ma, X.; Dai, Z.; He, Z.; Ma, J.; Wang, Y.; Wang, Y. Learning traffic as images: A deep convolutional neural network for large-scale transportation network speed prediction. Sensors 2017, 17, 818. [Google Scholar] [CrossRef]
- Yu, B.; Yin, H.; Zhu, Z. Spatio-temporal graph convolutional networks: A deep learning framework for traffic forecasting. In Proceedings of the 27th International Joint Conference on Artificial Intelligence (IJCAI 2018), Stockholm, Sweden, 13–19 July 2018; pp. 3634–3640. [Google Scholar] [CrossRef]
- Ke, J.; Zheng, H.; Yang, H.; Chen, X. Short-term forecasting of passenger demand under on-demand ride services: A spatio-temporal deep learning approach. Transp. Res. Part C Emerg. Technol. 2017, 85, 591–608. [Google Scholar] [CrossRef]
- Chu, T.; Wang, J.; Codecà, L.; Li, Z. Multi-Agent Deep Reinforcement Learning for Large-Scale Traffic Signal Control. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1086–1095. [Google Scholar] [CrossRef]
- Nadarajan, J.; Sivanraj, R. Attention-Based Multiscale Spatiotemporal Network for Traffic Forecast with Fusion of External Factors. ISPRS Int. J. Geo-Inf. 2022, 11, 619. [Google Scholar] [CrossRef]
- Yan, P.; Li, Z.; Ijaradar, J.; Pape, S.; Körner, M.; Wang, M. An Imputation-Enhanced Hybrid Deep Learning Approach for Traffic Volume Prediction in Urban Networks: A Case Study in Dresden. Data Sci.Transp. 2024, 6, 22. [Google Scholar] [CrossRef]
- Zhou, J.; Dai, H.-N.; Wang, H. Lightweight Convolution Neural Networks for Mobile Edge Computing in Transportation Cyber Physical Systems. ACM Trans. Intell. Syst. Technol. 2019, 10, 11–12. [Google Scholar] [CrossRef]
- Zhou, T.; Ma, Z.; Wen, Q.; Wang, X.; Sun, L.; Jin, R. FEDformer: Frequency enhanced decomposed transformer for long-term series forecasting. In Proceedings of the 39th International Conference on Machine Learning (ICML 2022), Baltimore, MD, USA, 17–23 July 2022; pp. 27268–27286. [Google Scholar]
- Chen, Y.-T.; Liu, A.; Li, C.; Li, S.; Yang, X. Traffic flow prediction based on spatial-temporal multi factor fusion graph convolutional networks. Sci. Rep. 2025, 15, 12612. [Google Scholar] [CrossRef]
- Huang, X.; Jiang, Y.; Wang, J.; Lan, Y.; Chen, H. A Multi-Modal Attention Neural Network for Traffic Flow Prediction by Capturing Long-Short Term Sequence Correlation. Sci. Rep. 2023, 13, 21859. [Google Scholar] [CrossRef]
- Ling, J.; Lan, Y.; Huang, X.; Yang, X. A Multi-Scale Residual Graph Convolution Network with Hierarchical Attention for Predicting Traffic Flow in Urban Mobility. Complex Intell. Syst. 2024, 10, 3305–3317. [Google Scholar] [CrossRef]
- Li, Y.; Yu, R.; Shahabi, C.; Liu, Y. Diffusion convolutional recurrent neural network: Data-driven traffic forecasting. In Proceedings of the International Conference on Learning Representations (ICLR 2018), Vancouver, BC, Canada, 30 April–3 May 2018. [Google Scholar] [CrossRef]
- Dou, Z.; Guo, D. DPSTCN: Dynamic Pattern-Aware Spatio-Temporal Convolutional Networks for Traffic Flow Forecasting. ISPRS Int. J. Geo-Information. 2025, 14, 10. [Google Scholar] [CrossRef]
- Sayed, S.A.; Abdelhamid, Y.; Hefny, H.A. Traffic Flow Prediction Using Big Data and Geographic Information Systems: A Survey of Data Sources, Frameworks, Challenges, and Opportunities. Int. J. Comput. Digit. Syst. 2023, 14, 613–632. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Congestion Accuracy (%) | F1-Score | MAE | RMSE | Inference Latency (ms) |
|---|---|---|---|---|---|
| LSTM | 81.4 | 0.824 | 0.142 | 0.188 | 67.9 |
| GRU | 82.1 | 0.832 | 0.137 | 0.182 | 54.7 |
| xGRU | 84.2 | 0.854 | 0.127 | 0.166 | 39.5 |
| ST-GCN | 85.7 | 0.864 | 0.125 | 0.161 | 123.6 |
| DCRNN | 86.2 | 0.869 | 0.122 | 0.157 | 141.2 |
| Informer | 83.9 | 0.841 | 0.132 | 0.171 | 228.4 |
| Autoformer | 85.1 | 0.858 | 0.128 | 0.164 | 195.6 |
| xLSTM | 87.3 | 0.882 | 0.116 | 0.149 | 41.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, C.-I.; Chang, J.-S.; Hsieh, J.-W.; Wu, J.-H.; Chang, W.-Y. xLSTM-Based Urban Traffic Flow Prediction for Intelligent Transportation Governance. Appl. Sci. 2025, 15, 7859. https://doi.org/10.3390/app15147859
Huang C-I, Chang J-S, Hsieh J-W, Wu J-H, Chang W-Y. xLSTM-Based Urban Traffic Flow Prediction for Intelligent Transportation Governance. Applied Sciences. 2025; 15(14):7859. https://doi.org/10.3390/app15147859
Chicago/Turabian StyleHuang, Chung-I, Jih-Sheng Chang, Jun-Wei Hsieh, Jyh-Horng Wu, and Wen-Yi Chang. 2025. "xLSTM-Based Urban Traffic Flow Prediction for Intelligent Transportation Governance" Applied Sciences 15, no. 14: 7859. https://doi.org/10.3390/app15147859
APA StyleHuang, C.-I., Chang, J.-S., Hsieh, J.-W., Wu, J.-H., & Chang, W.-Y. (2025). xLSTM-Based Urban Traffic Flow Prediction for Intelligent Transportation Governance. Applied Sciences, 15(14), 7859. https://doi.org/10.3390/app15147859