
Improved PR Control Without Load Current Sensors and Phase-Locked Loops for APFs

Abstract
1. Introduction
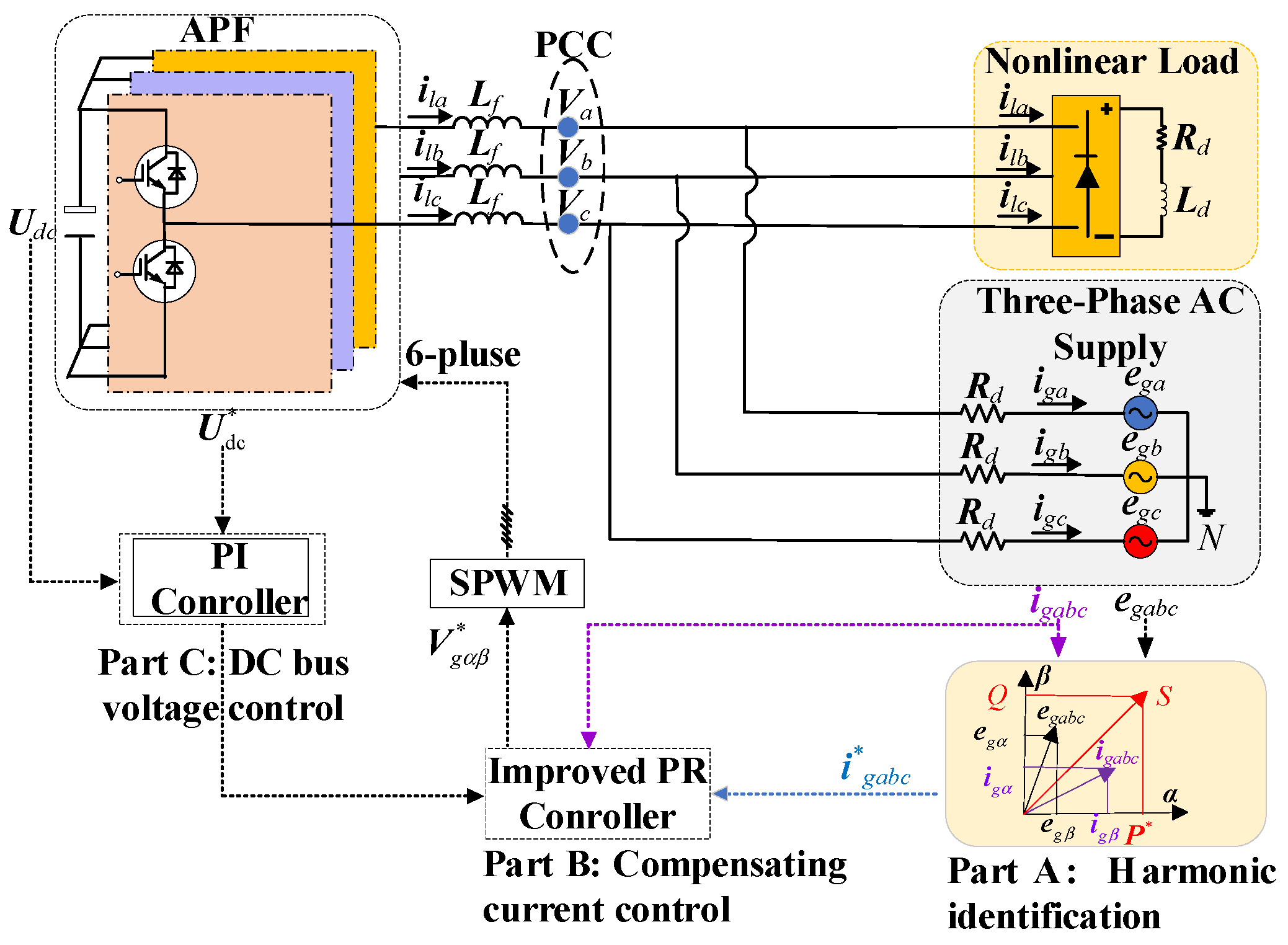
- Harmonic reference extraction based on instantaneous power theory: In the proposed scheme, the reference current is derived by applying frequency domain instantaneous power theory to the measured grid-side voltage and current. This allows the fundamental active power to be isolated and used as the reference, enabling precise extraction of the desired current component. Compared to the time-domain SCEA method adopted in [22,23], which suffers from intrinsic delay due to quarter-cycle accumulation, the proposed approach offers faster response and improved real-time performance.
- Sensorless control strategy without load current measurement: The control architecture utilizes only grid-side voltage and current measurements to both generate and track the reference current, completely eliminating the need for load-side current sensors. Such a design simplifies the sensing configuration and improves system robustness, especially in contrast to [22,23], where both grid-side and load-side current sensors are still required.
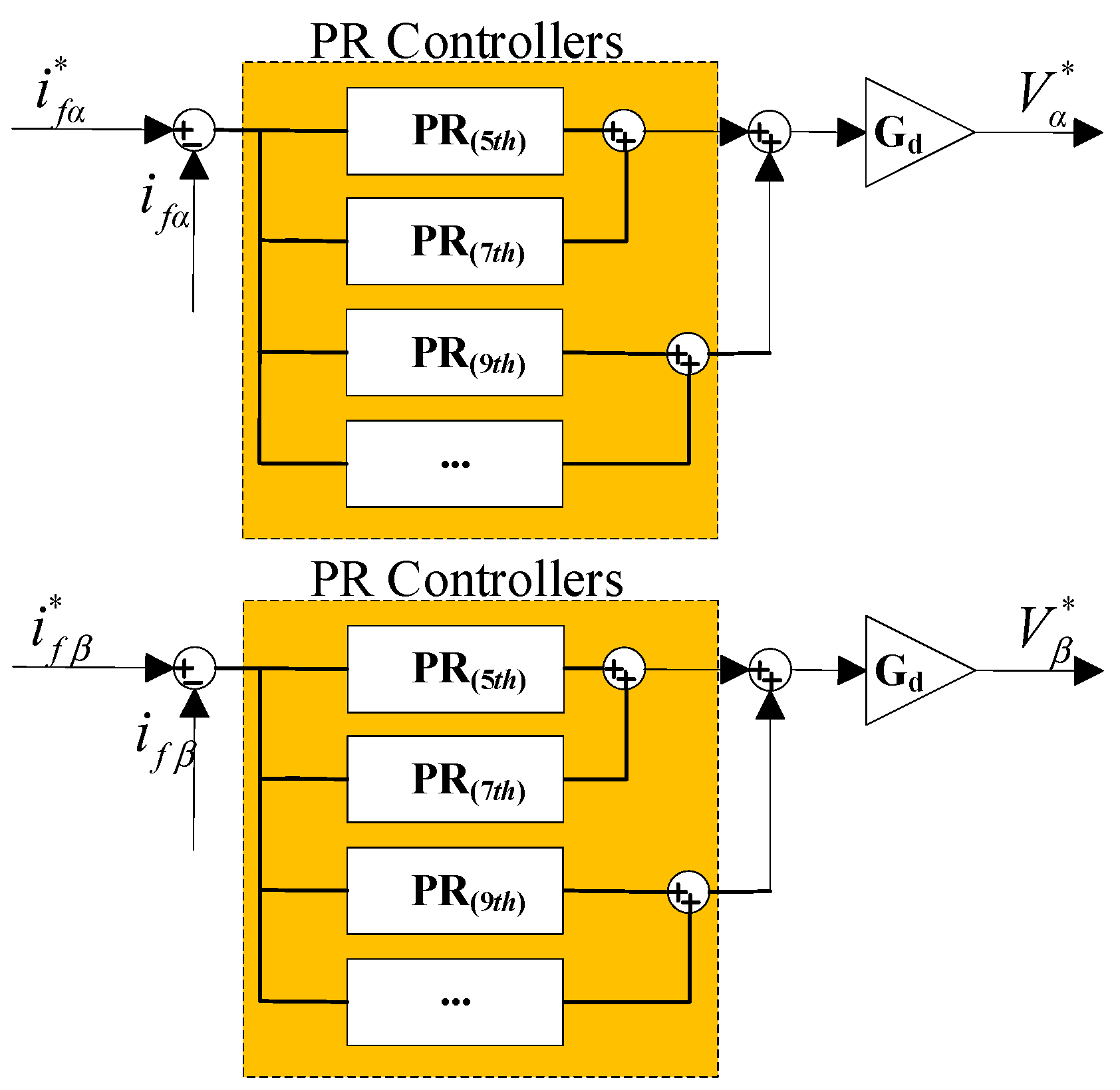
- Reduced PR controller demand through instantaneous power theory: Instead of assigning a dedicated PR controller for each harmonic order, the proposed method performs harmonic compensation through instantaneous power theory, with only a single PR controller used for tracking the fundamental frequency current. The compensation effect for higher-order harmonics is achieved indirectly through accurate shaping of the inverter current. This reduces controller count and computational burden while maintaining effective multi-order harmonic suppression.
2. APF Control System
3. A PLL-Less Load Current Sensorless Improved PR Control
3.1. PLL-Less Load Current Sensorless Strategy
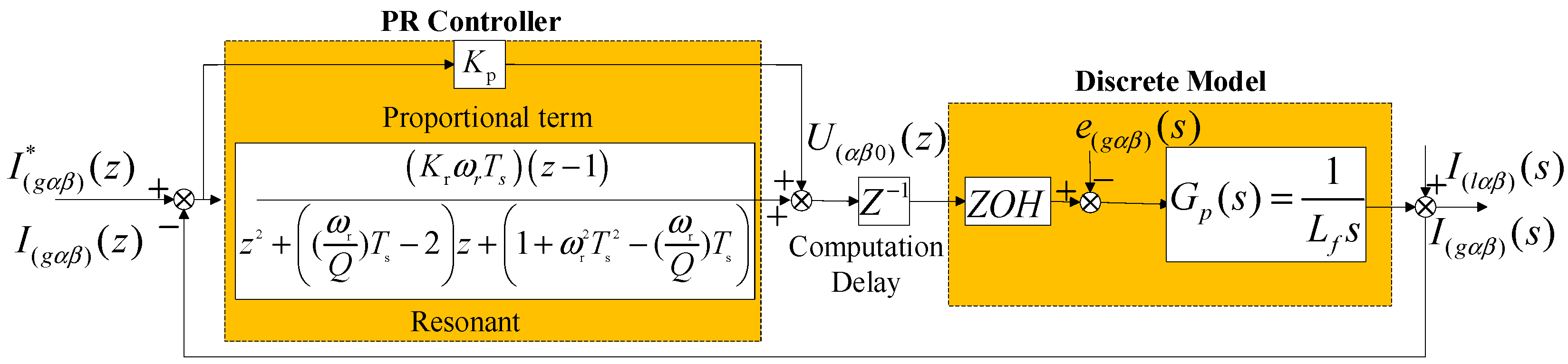
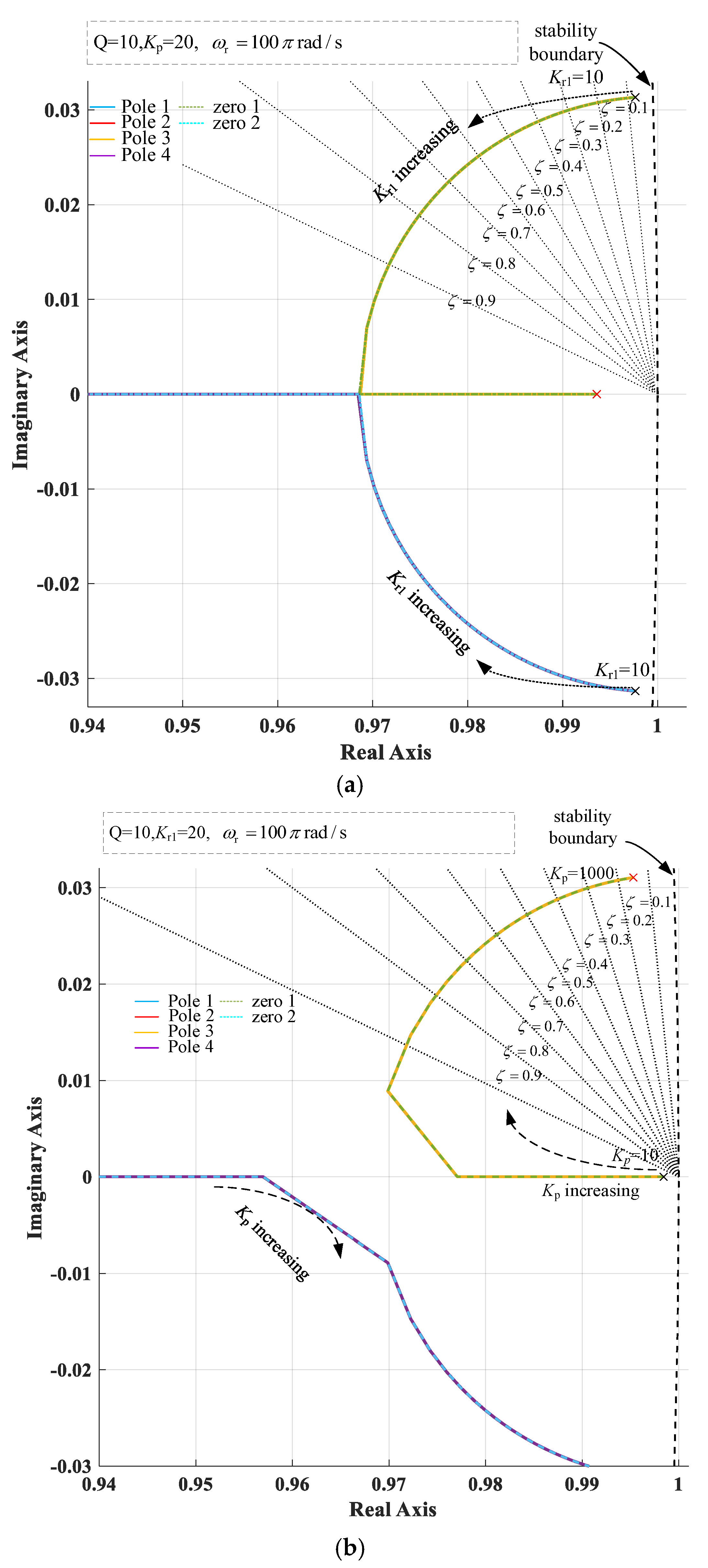
3.2. PR Controller Parameter Design
4. Simulation Verification
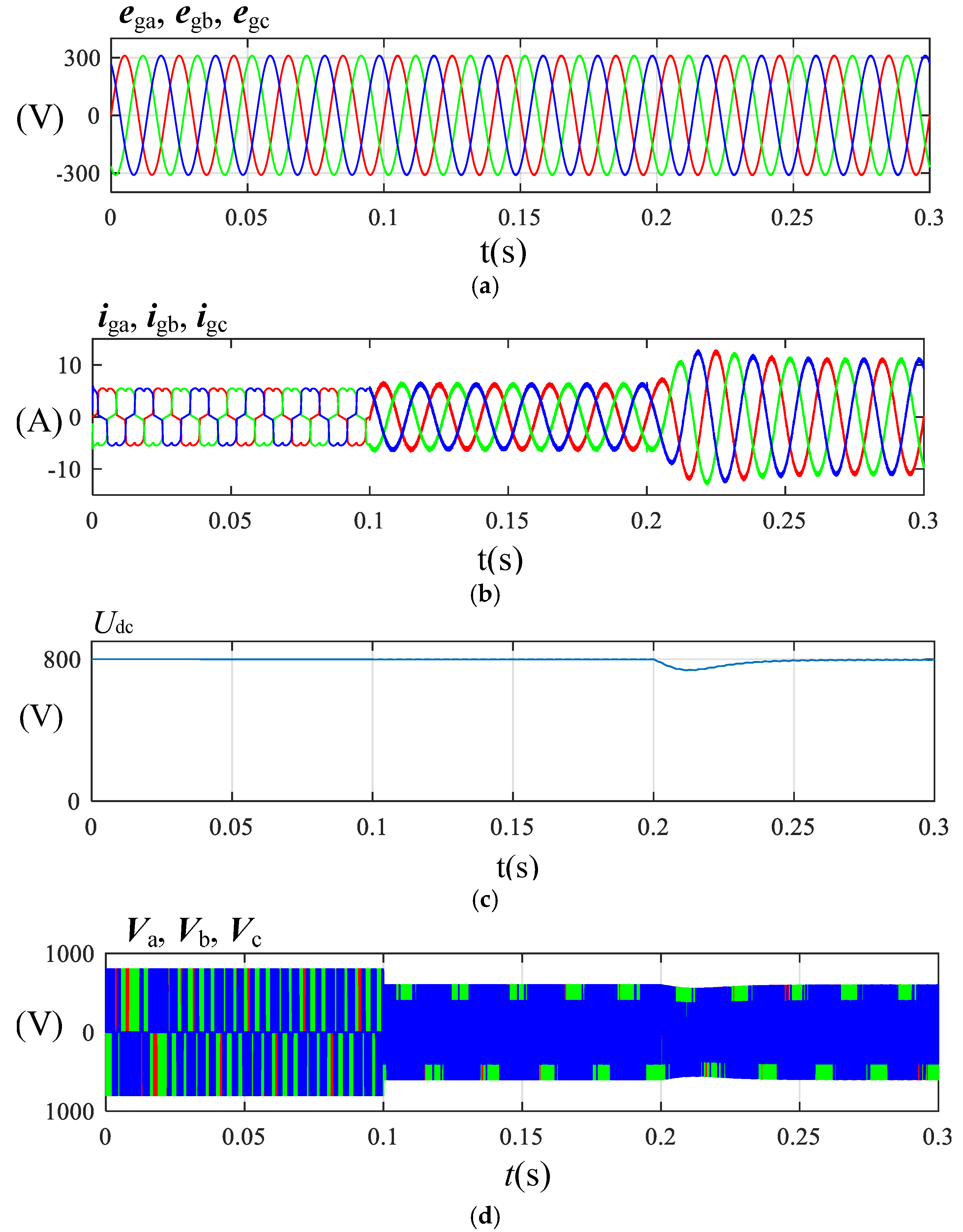
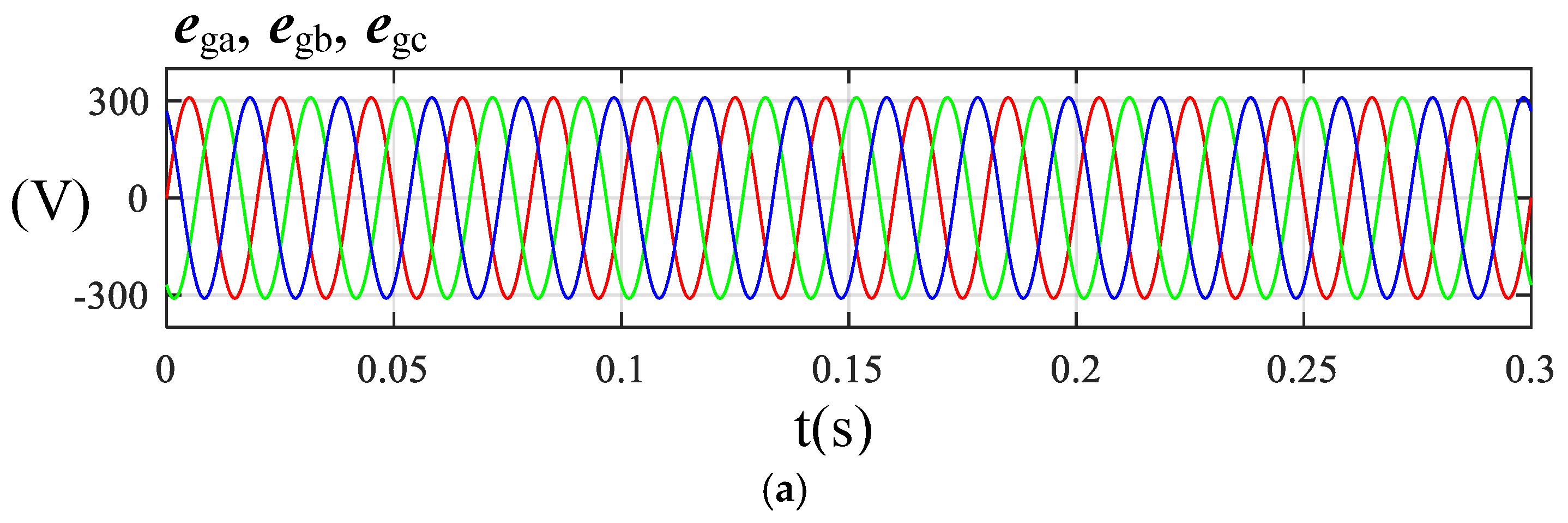
4.1. Traditional PR Control Simulation Analysis
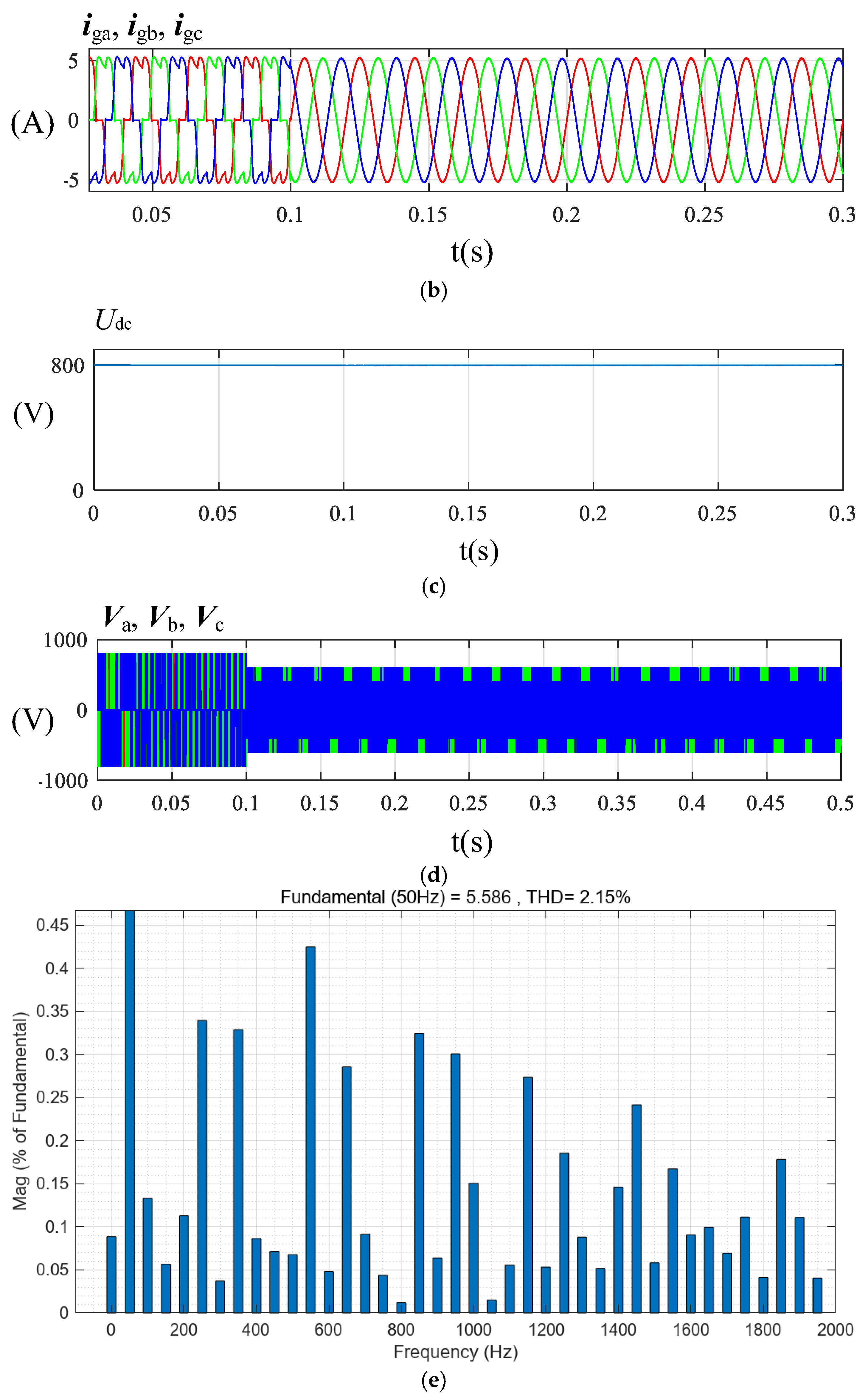
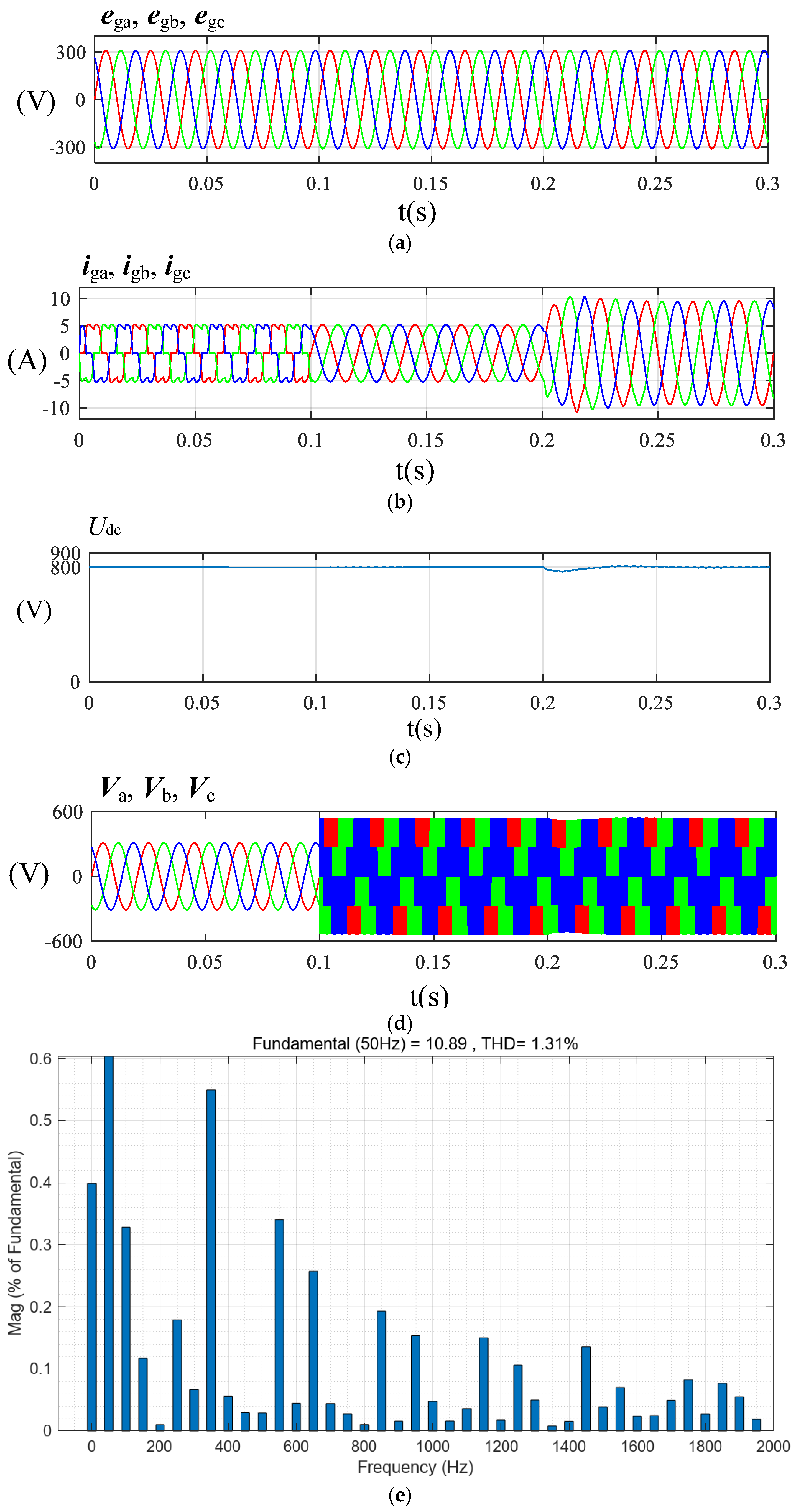
4.2. Simulation Analysis of Proposed PR Control Method
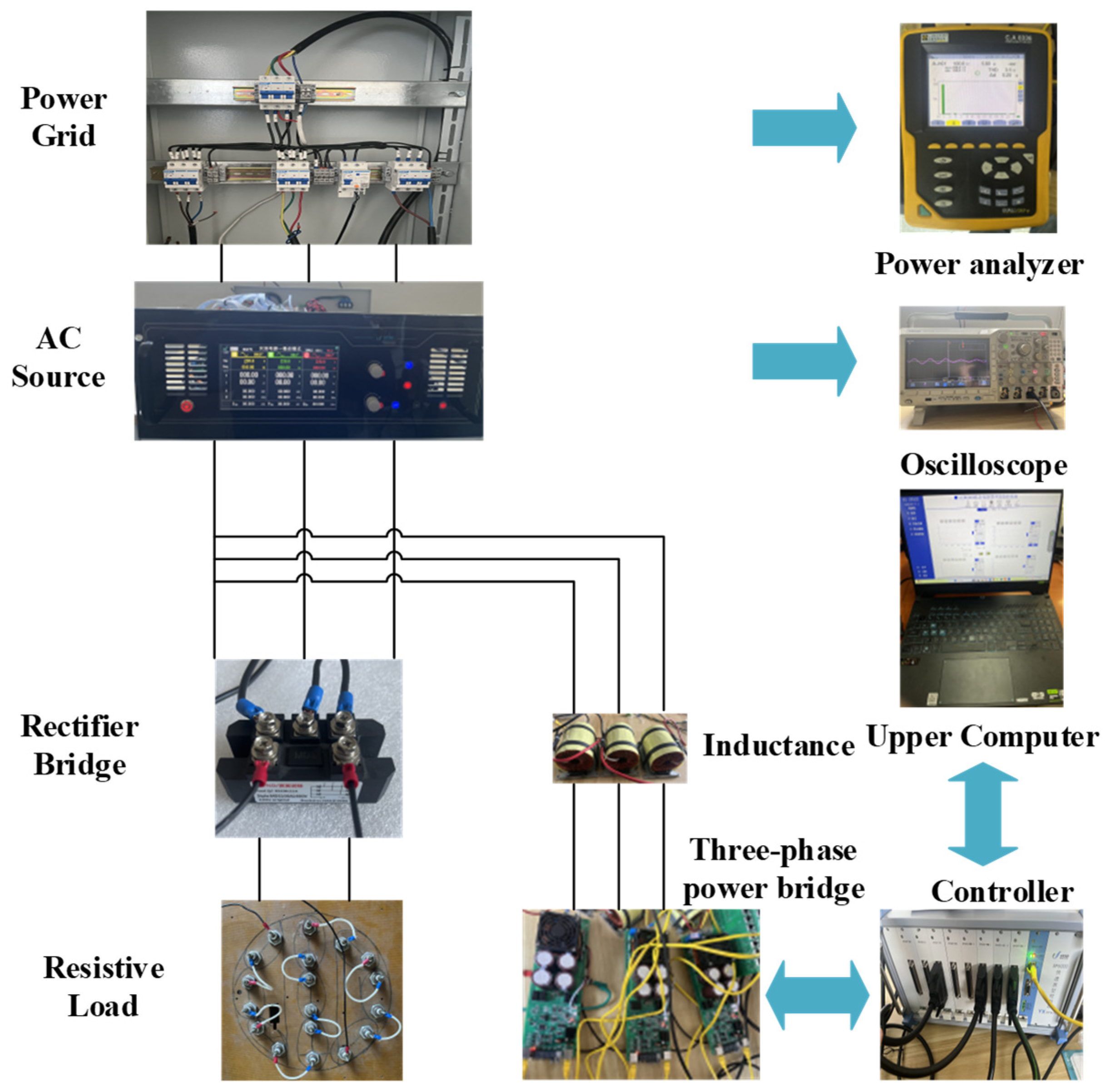
5. Experimental Verification
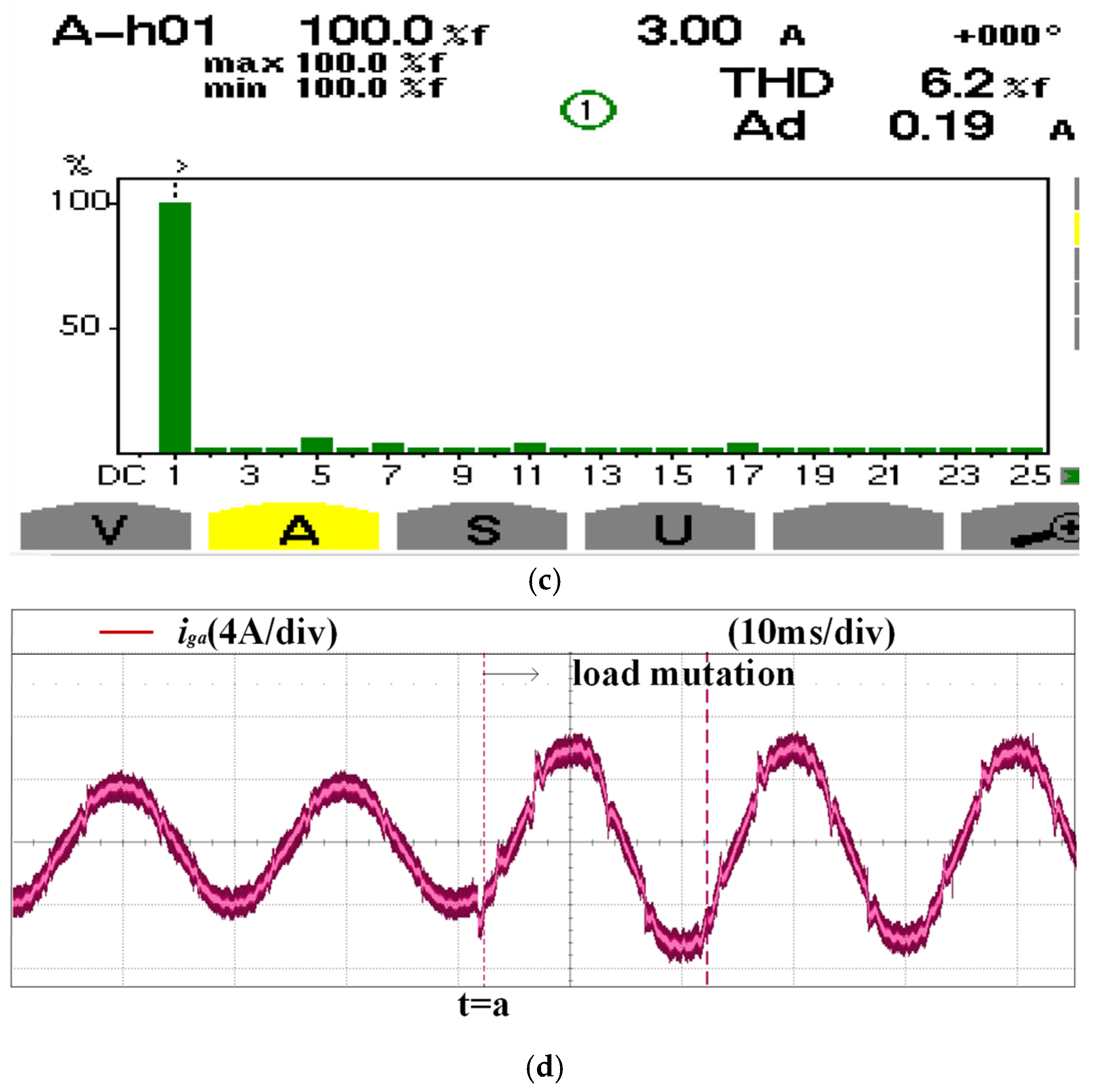
5.1. Analysis of Traditional PR Control Experiments
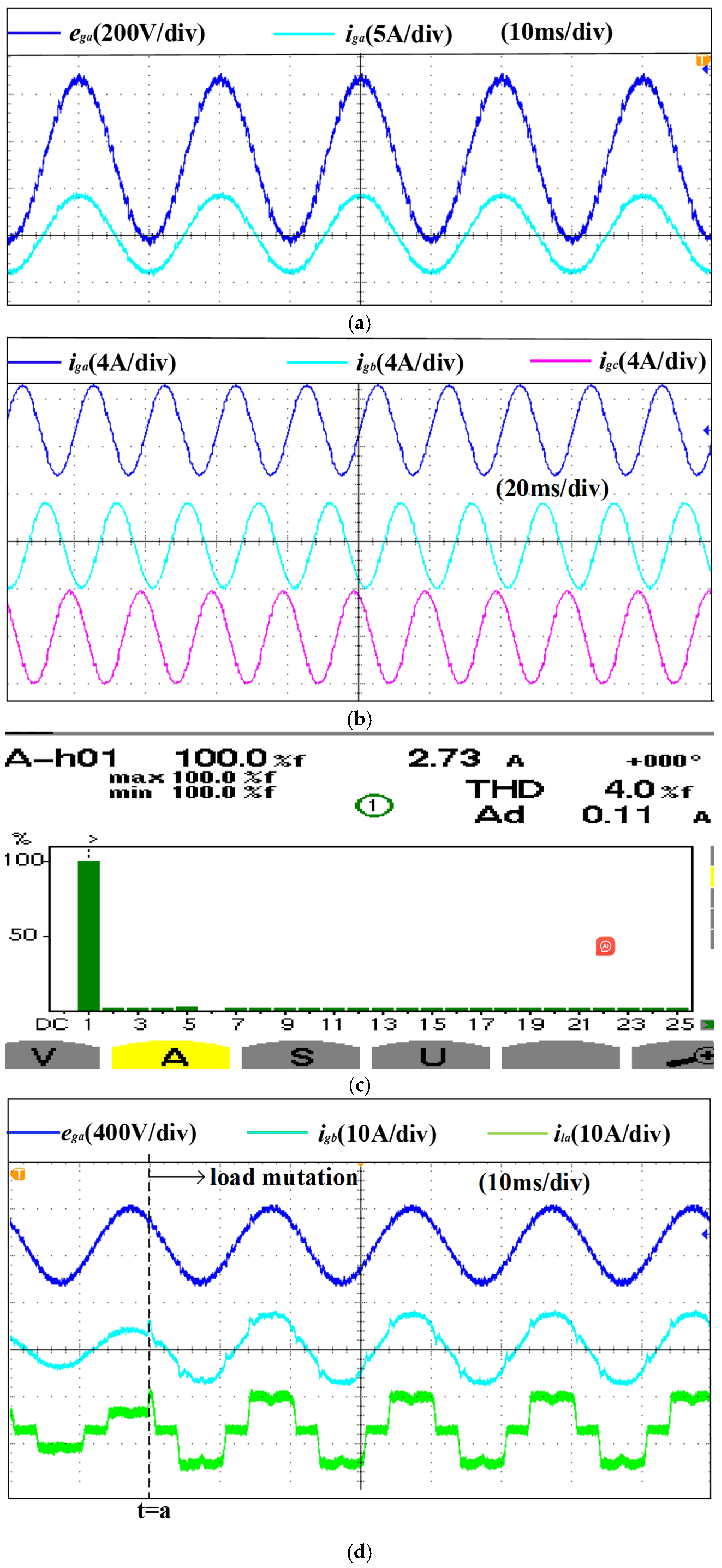
5.2. Analysis of Proposed PR Control Experiment
6. Conclusions
- (1)
- The proposed reference current generation method eliminates the need for load-side current sensors and relies solely on grid voltage and current measurements. This avoids the dependence on load-side signals inherent in traditional methods, thereby reducing sensor count and improving cost efficiency.
- (2)
- A control strategy that operates without a PLL is developed, eliminating the need for synchronous coordinate transformation. This enhances the system’s robustness against frequency fluctuations and PLL-related errors.
- (3)
- The proposed parameter tuning approach does not rely on empirical adjustment. Instead, it is grounded in discrete domain modeling and root locus analysis, offering a quantifiable and visually guided method for controller design.
- (4)
- The proposed harmonic compensation scheme eliminates the need to design individual PR controllers for each harmonic order. By integrating an instantaneous power theory with a single set of fundamental PR controllers, multi-order harmonic compensation can be achieved, thereby reducing computational complexity and resource consumption.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jiang, X.; Yi, H.; Zhuo, F.; Li, Y. A Stabilization Strategy Based on Grid Current Feedforward for the Harmonic Oscillation of APF System. IEEE J. Emerg. Sel. Top. Power Electron. 2024, 12, 2116–2129. [Google Scholar] [CrossRef]
- Upanya, M.; Anushree, S.; Masood, M.; Deekshitha, G.N.; Kumara, K.P.N. Harmonic Mitigation Using Active and Passive Filters. In Proceedings of the 2025 International Conference on Sustainable Energy Technologies and Computational Intelligence (SETCOM), Gandhinagar, India, 21–23 February 2025; pp. 1–6. [Google Scholar] [CrossRef]
- Li, Y.; Yi, H.; Zhuo, F.; Jiang, X. Harmonic Oscillation and Stabilization Strategy of Source-Current-Detected Shunt APF Considering Interaction with Nonlinear Load and Grid Impedance. IEEE J. Emerg. Sel. Top. Power Electron. 2024, 12, 420–430. [Google Scholar] [CrossRef]
- Woo, D.; Kim, S. Accurate Harmonic Current Control for Large-Capacity LCL-Type Active Power Filter with Inverter-Side Current Feedback. IEEE Trans. Ind. Appl. 2025, 61, 4065–4078. [Google Scholar] [CrossRef]
- Fei, J.; Wang, J.; Zhang, L. Complementary Sliding Mode Control Using Petri Probabilistic Fuzzy Recurrent Neural Network for Active Power Filter. IEEE Trans. Autom. Sci. Eng. 2025, 22, 8108–8122. [Google Scholar] [CrossRef]
- Yan, Q.; Zhang, L.; Zhao, R.; He, J.; Guo, L.; Zhang, Z. A Paralleled Current and Voltage Control Strategy with Compound PI Controllers for Three-Phase Active Power Filters. IEEE Trans. Power Electron. 2024, 39, 6989–7001. [Google Scholar] [CrossRef]
- Ou, M.; Zou, J.; Liu, Q.; Yang, H. A Dual-Loop Control Strategy Based on PI and Repetitive Control for APF with CoolSiC™ MOSFET. In Proceedings of the 2023 6th International Conference on Electrical Engineering and Green Energy (CEEGE), Grimstad, Norway, 6–9 June 2023; pp. 29–34. [Google Scholar] [CrossRef]
- Dong, X.; Li, H. Model Predictive Control for A PLL-Less SiC Grid-Tied Inverter with Zero-Voltage-Ride-Through Capability. In Proceedings of the 2022 IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 9–13 October 2022; pp. 1–7. [Google Scholar] [CrossRef]
- Mishra, M.K.; Mishra, A.; Lal, V.N. An Advanced PLL-less Control Scheme for LVRT Capability with Harmonics Current Mitigations in Grid-Tied PV System Under Weak and Distorted Grid. In Proceedings of the 2022 IEEE Applied Power Electronics Conference and Exposition (APEC), Houston, TX, USA, 20–24 March 2022; pp. 1298–1304. [Google Scholar] [CrossRef]
- Bacon, V.D.; de Souza, V.; Padim, E.T.; da Silva, S.A.O. Influence of the PLL phase-angle quality on the static and dynamic performance of grid-connected systems. In Proceedings of the 2017 Brazilian Power Electronics Conference (COBEP), Juiz de Fora, Brazil, 19–22 November 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Parvez, M.; Elias, M.F.M.; Rahim, N.A.; Blaabjerg, F.; Abbott, D.; Al-Sarawi, S.F. Comparative Study of Discrete PI and PR Controls for Single-Phase UPS Inverter. IEEE Access 2020, 8, 45584–45595. [Google Scholar] [CrossRef]
- Gupta, R.K.; Jena, S.; Babu, B.C. Analysis of PR controller for eliminating double frequency oscillations in DC-link of 3-Φ shunt APF during source disturbances. In Proceedings of the 2013 Students Conference on Engineering and Systems (SCES), Allahabad, India, 12–14 April 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Sharma, S.; Verma, V. A Brief Review Regarding Sensor Reduction and Faults in Shunt Active Power Filter. In Proceedings of the 2018 2nd IEEE International Conference on Power Electronics, Intelligent Control and Energy Systems (ICPEICES), Delhi, India, 22–24 October 2018; pp. 426–430. [Google Scholar] [CrossRef]
- Ribeiro, R.L.A.; Azevedo, C.C.; Sousa, R.M. A non-standard adaptive control for shunt active power filter without current harmonic detection. In Proceedings of the IECON 2010—36th Annual Conference on IEEE Industrial Electronics Society, Glendale, AZ, USA, 7–10 November 2010; pp. 2007–2012. [Google Scholar] [CrossRef]
- Nedeljković, D.; Nemec, M.; Drobnič, K.; Ambrožič, V. Active power filter with a reduced number of current sensors. Elektrotehniški Vestn. 2009, 76, 275–280. [Google Scholar]
- Wojciechowski, D.; Strzelecki, R. Sensorless predictive control of three-phase parallel active filter. In Proceedings of the AFRICON 2007, Windhoek, South Africa, 26–28 September 2007; pp. 1–7. [Google Scholar] [CrossRef]
- Wojciechowski, D. Grid voltages sensorless control system of the PWM rectifier with active filtering function. In Proceedings of the IEEE Compatibility in Power Electronics, Gdynia, Poland, 1–3 June 2005; pp. 238–246. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, Z.; Jiao, J.; Liu, J. Grid-Voltage Sensorless Model Predictive Control of Three-Phase PWM Rectifier Under Unbalanced and Distorted Grid Voltages. IEEE Trans. Power Electron. 2020, 35, 8663–8672. [Google Scholar] [CrossRef]
- Ketzer, M.B.; Jacobina, C.B. Nonlinear virtual flux oriented control for sensorless active filters. In Proceedings of the 2013 Brazilian Power Electronics Conference, Gramado, Brazil, 27–31 October 2013; pp. 393–398. [Google Scholar] [CrossRef]
- Al-Gahtani, S.F.; Nelms, R.M. Performance of a Shunt Active Power Filter for Unbalanced Conditions Using Only Current Measurements. Energies 2021, 14, 397. [Google Scholar] [CrossRef]
- Al-Gahtani, S.; Nelms, R.M. A New Voltage Sensorless Control Method for a Shunt Active Power Filter for Unbalanced Conditions. In Proceedings of the 2019 IEEE International Conference on Environment and Electrical Engineering and 2019 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Genova, Italy, 11–14 June 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Alathamneh, M.; Ghanayem, H.; Nelms, R.M. Shunt active power filter voltage sensorless method using a PR controller for unbalanced grid conditions. Energy Rep. 2023, 9 (Suppl. S1), 1056–1064. [Google Scholar] [CrossRef]
- Alathamneh, M.; Ghanayem, H.; Nelms, R.M. A Robust Three-Phase Shunt Active Power Filter with Frequency Adaptive PR Controller and Sensorless Voltage Control. In Proceedings of the 2023 IEEE Industry Applications Society Annual Meeting (IAS), Nashville, TN, USA, 29 October–2 November 2023; pp. 1–8. [Google Scholar] [CrossRef]
- Santiprapan, P.; Areerak, K.; Areerak, K. An Adaptive Gain of Proportional-Resonant Controller for an Active Power Filter. IEEE Trans. Power Electron. 2024, 39, 1433–1446. [Google Scholar] [CrossRef]
- Lenwari, W.; Sumner, M.; Zanchetta, P. The Use of Genetic Algorithms for the Design of Resonant Compensators for Active Filters. IEEE Trans. Ind. Electron. 2009, 56, 2852–2861. [Google Scholar] [CrossRef]
- Santiprapan, P.; Areerak, K.; Areerak, K. Proportional plus resonant control for active power filter in unbalanced system. In Proceedings of the 2017 International Electrical Engineering Congress (iEECON), Pattaya, Thailand, 8–10 March 2017; pp. 1–4. [Google Scholar] [CrossRef]
- Pan, M.; Xi, Z.; Zhou, M. An Improved PR Controller Current Tracking Control Strategy Research for Active Power Filter; Atlantis Press: Dordrecht, The Netherlands, 2015. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Supply voltage and frequency | eg = 380 V(rms), f = 50 Hz |
| Active power filter circuit | Lf = 0.0022 H |
| C = 1500 µF, Udc = 600 V | |
| Nonlinear load | RL = 120 Ω |
| Sampling frequency | fs = 20 kHz |
| Switching frequency | fsw = 20 kHz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liao, J.; Yuan, W.; Zhang, Y.; Zou, J.; Zhang, X. Improved PR Control Without Load Current Sensors and Phase-Locked Loops for APFs. Appl. Sci. 2025, 15, 7830. https://doi.org/10.3390/app15147830
Liao J, Yuan W, Zhang Y, Zou J, Zhang X. Improved PR Control Without Load Current Sensors and Phase-Locked Loops for APFs. Applied Sciences. 2025; 15(14):7830. https://doi.org/10.3390/app15147830
Chicago/Turabian StyleLiao, Jianling, Wei Yuan, Yankui Zhang, Jia Zou, and Xu Zhang. 2025. "Improved PR Control Without Load Current Sensors and Phase-Locked Loops for APFs" Applied Sciences 15, no. 14: 7830. https://doi.org/10.3390/app15147830
APA StyleLiao, J., Yuan, W., Zhang, Y., Zou, J., & Zhang, X. (2025). Improved PR Control Without Load Current Sensors and Phase-Locked Loops for APFs. Applied Sciences, 15(14), 7830. https://doi.org/10.3390/app15147830