
Dynamic Interaction Analysis of Long-Span Bridges Under Stochastic Traffic and Wind Loads

 ,
, 
Abstract
1. Introduction
2. Framework for Stochastic Traffic–Bridge Coupled Vibration Under Combined Wind Action
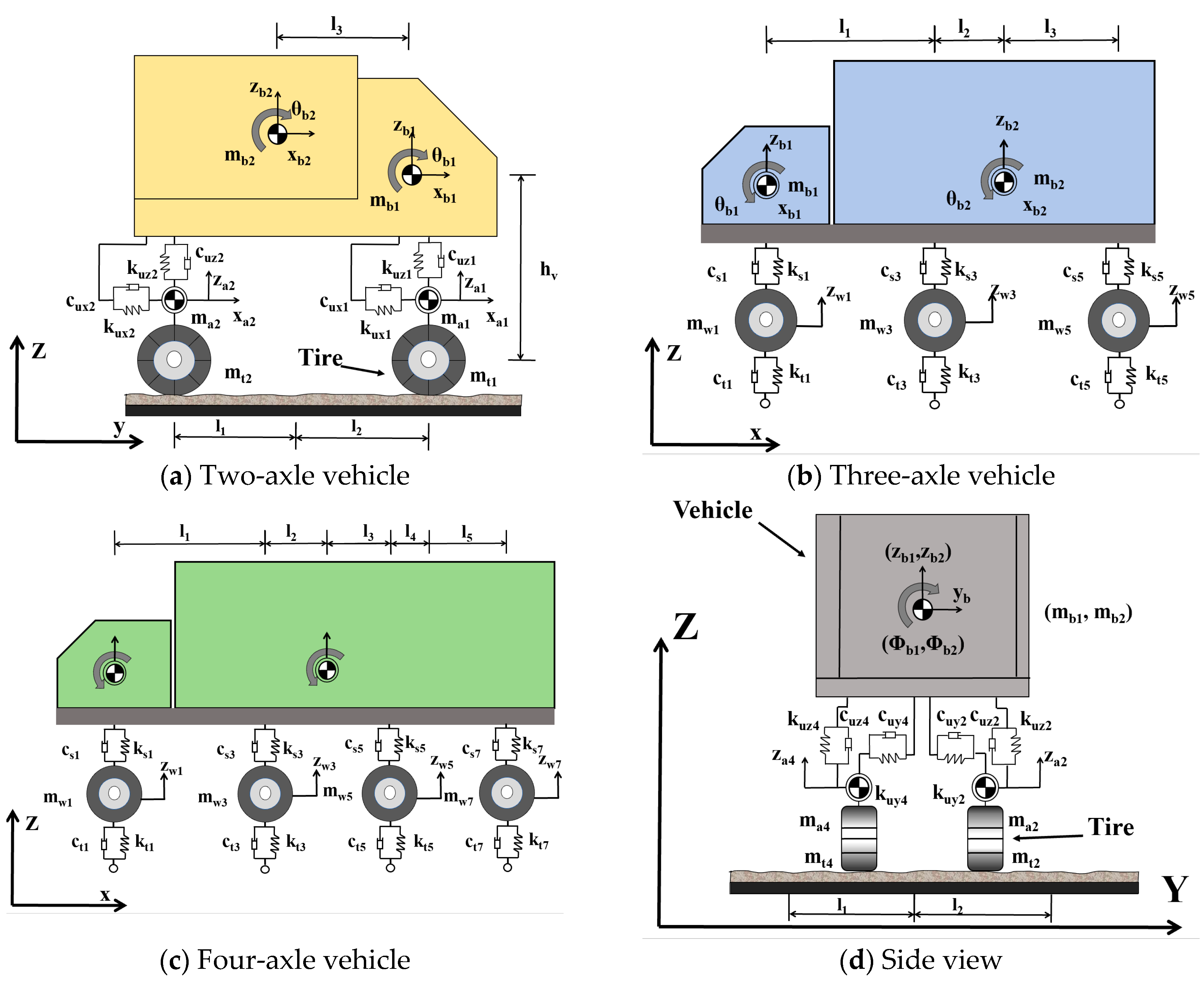
2.1. Vehicle–Bridge Coupling Dynamics Equation
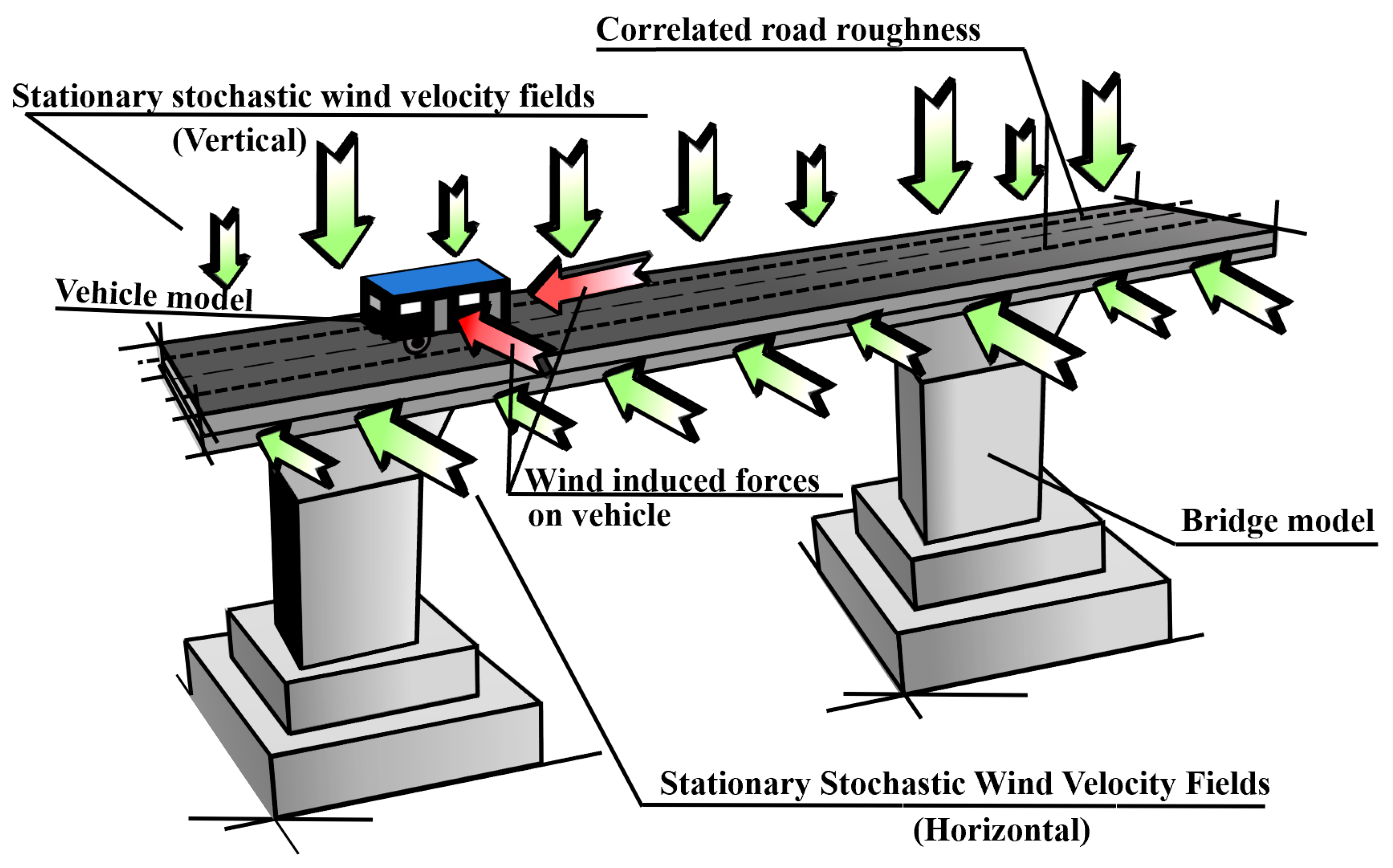
2.2. Derivation of Wind Loads
3. Nonlinear Dynamic Solution Methods for Large-Span Structures
3.1. Newmark-β Method
3.2. Newton–Raphson Methodology
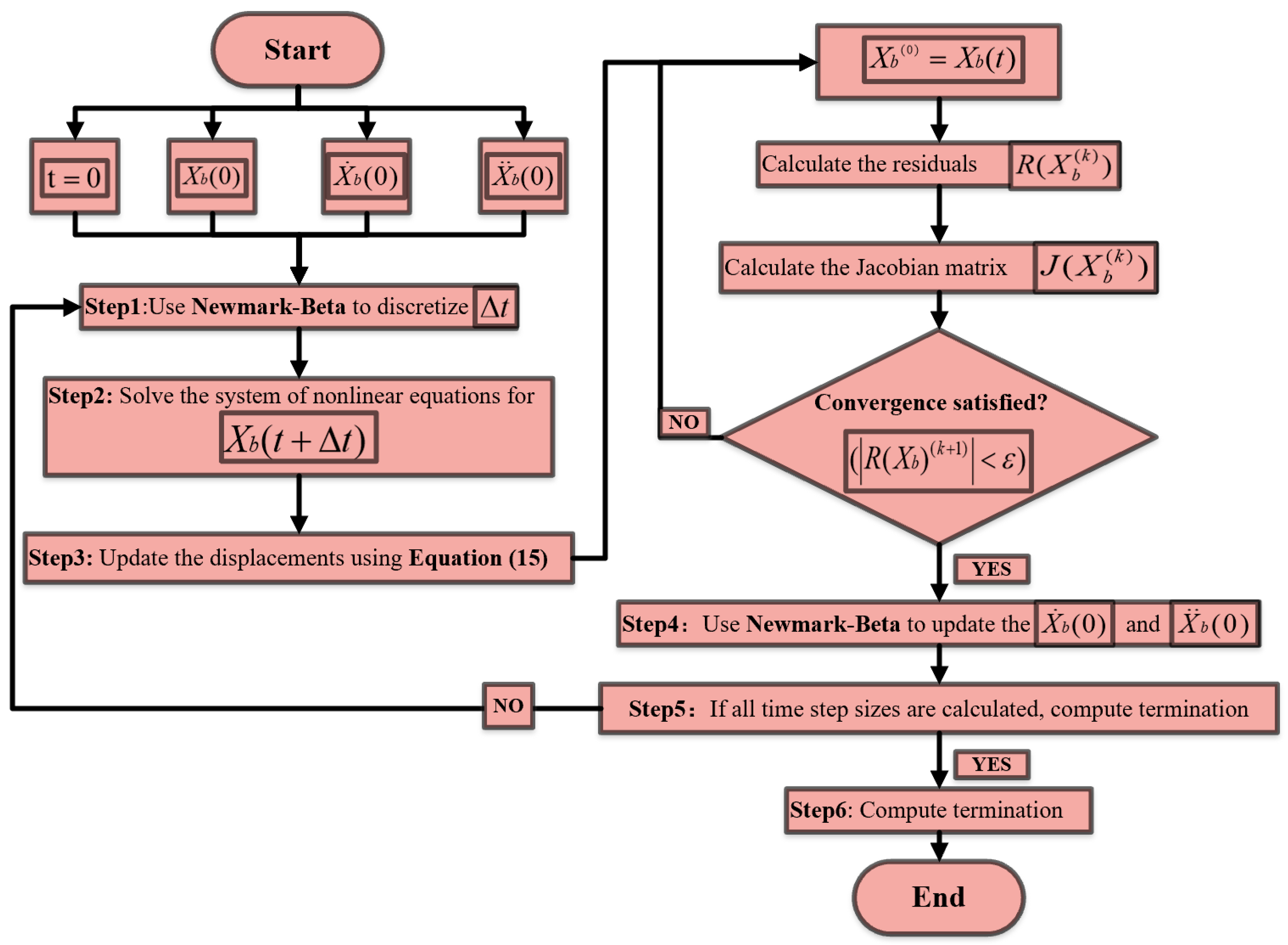
3.3. Large-Span Nonlinear Dynamics Solution
- (1)
- Initial conditions: The initial displacement , initial velocity , and initial acceleration are given at the initial moment t = 0.
- (2)
- Time-step discretization (Newmark-β method): The kinetic equations are discretized within time step using the Newmark-β method to obtain a system of nonlinear equations with respect to . This method was chosen for its balance between computational efficiency and accuracy in handling dynamic systems.
- (3)
- Iterative solution (Newton–Raphson method): For each time step , the system of nonlinear equations is solved iteratively using the Newton–Raphson method:
- (4)
- Update acceleration and velocity: After obtaining the converged displacement , the acceleration and velocity are updated using the formulas of the Newmark-β method:
- (5)
- Repeat steps 2 to 4 iteratively until all time steps have been calculated.
4. Application Examples
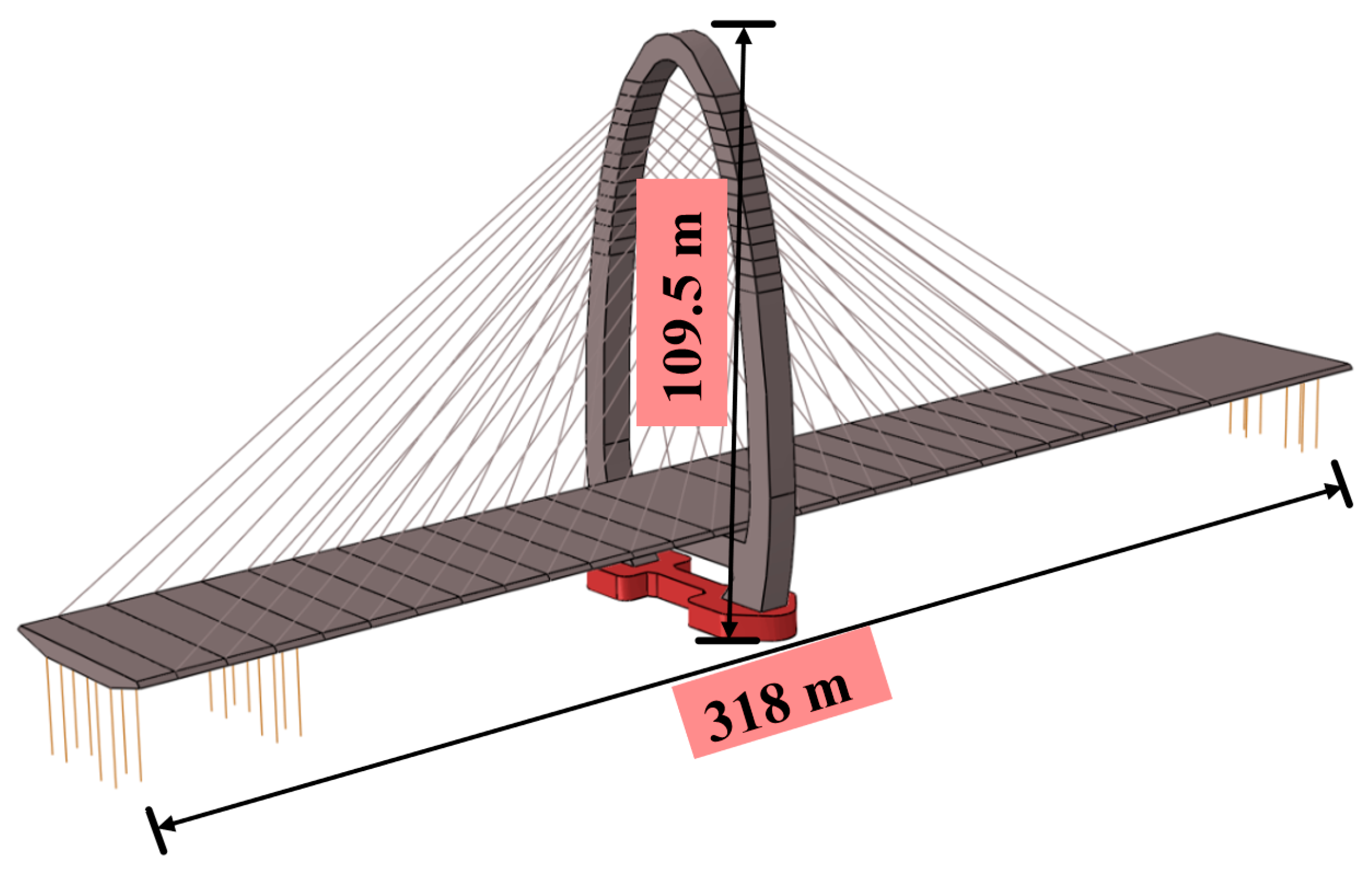
4.1. Overview of Project
4.2. Characteristics of Bridge Dynamics Under Different Traffic Densities
4.2.1. Bridge Vibration Response Under Sparse Traffic Flow
4.2.2. Bridge Vibration Response Under Dense Traffic Flow
4.2.3. Wind Load Effects
5. Conclusions
- (1)
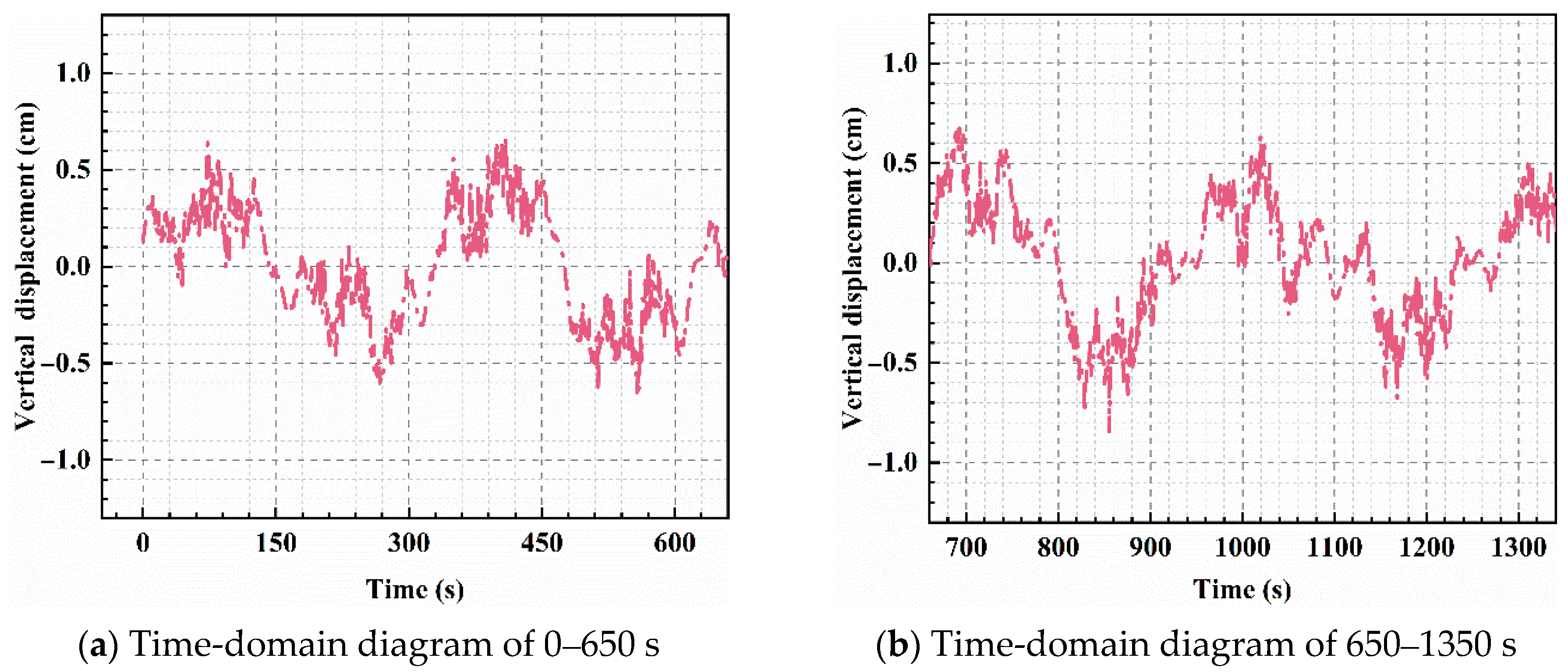
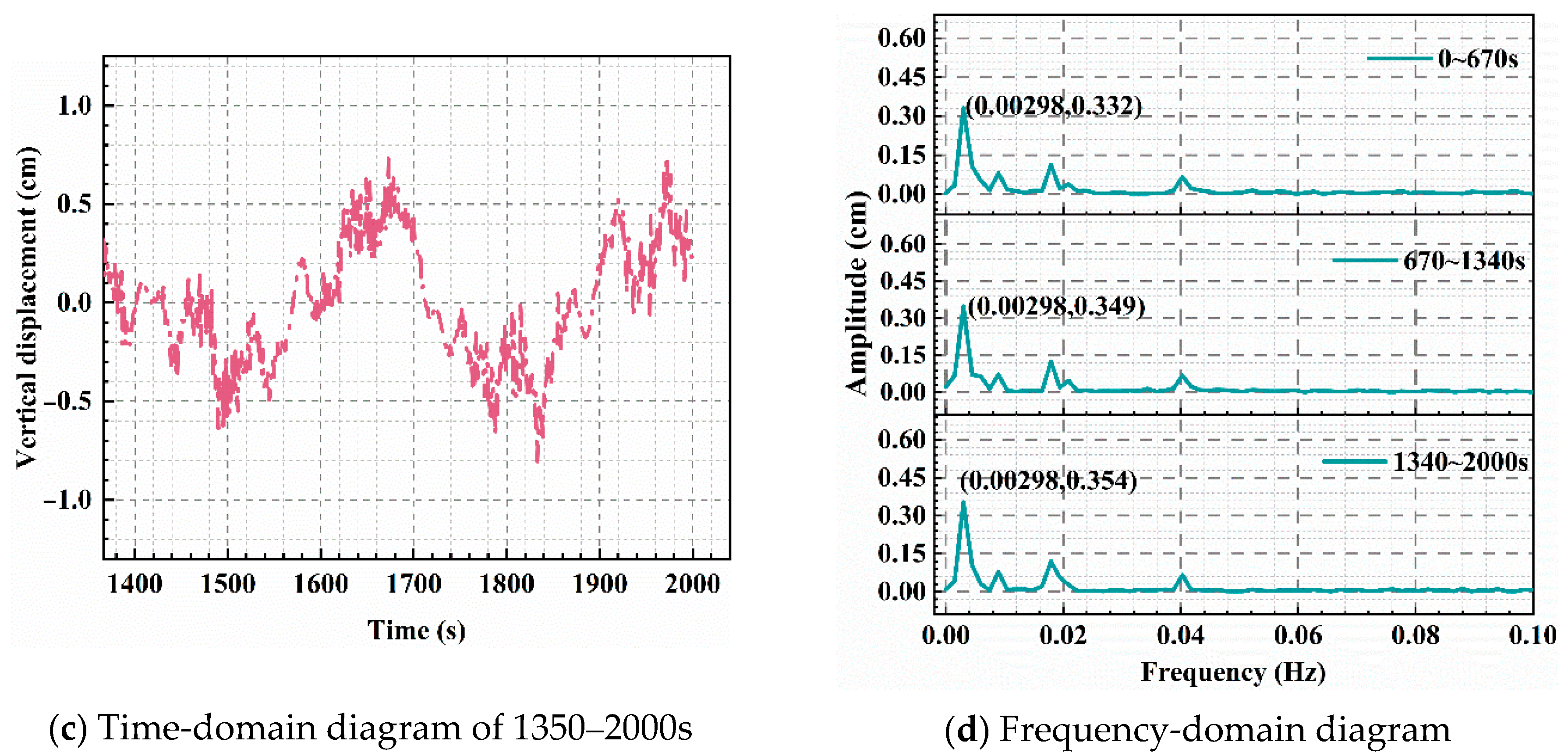
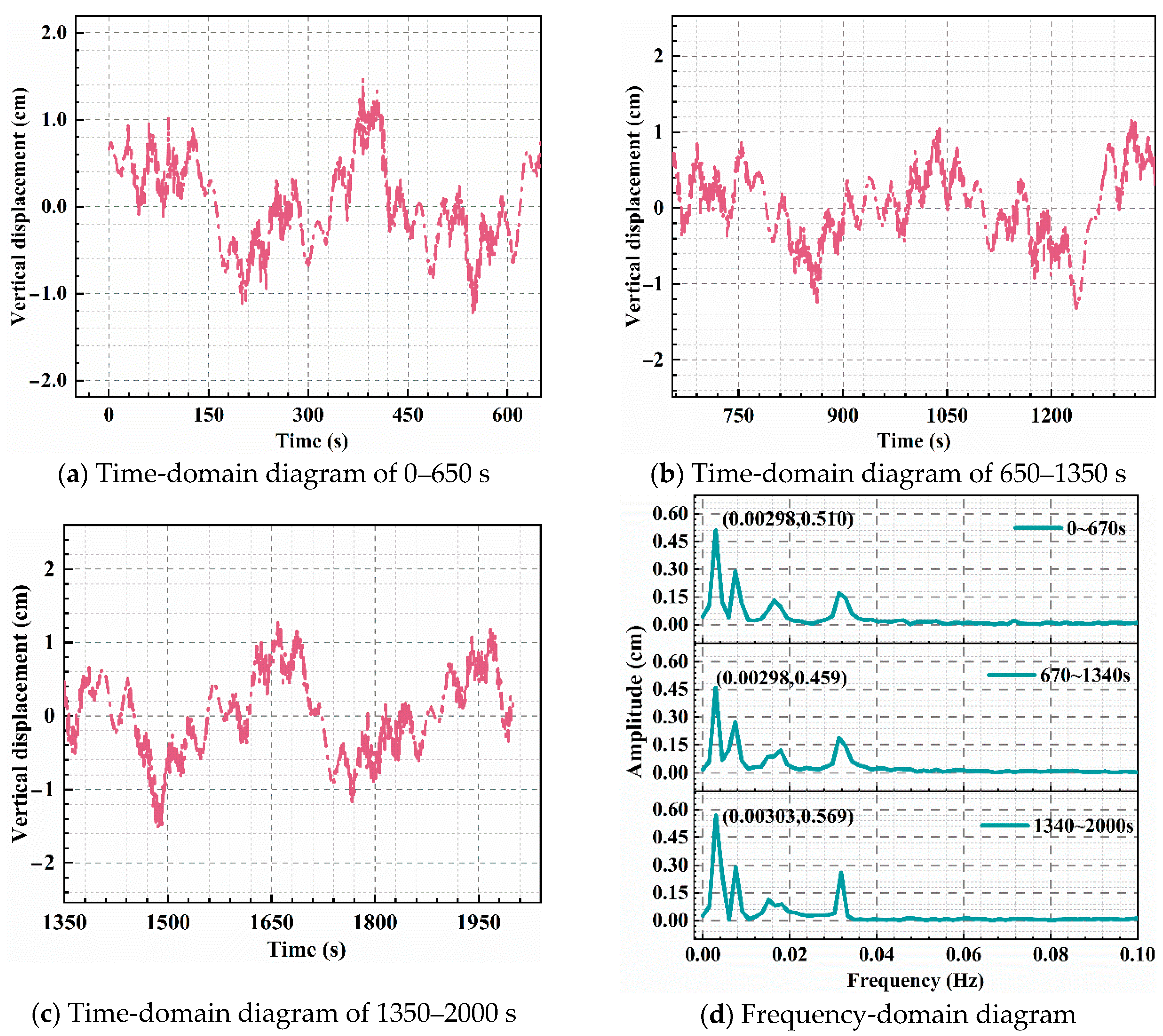
- The study reveals that under sparse traffic conditions, the vertical vibration amplitude of the bridge typically ranges from approximately 0.1 to 0.7 cm, with a peak displacement of 0.78 cm observed during specific time intervals. This indicates that sparse traffic results in lower vibration amplitudes due to the extended intervals between vehicles, leading to reduced vibration accumulation.
- (2)
- Under dense traffic conditions, the vertical vibration amplitude increases to a range of 0.3 to 1.5 cm with a maximum recorded displacement of 1.5 cm. Dense traffic conditions amplify the bridge’s vibration response by up to 114.28%, highlighting the significant impact of continuous vehicle loads on bridge dynamics.
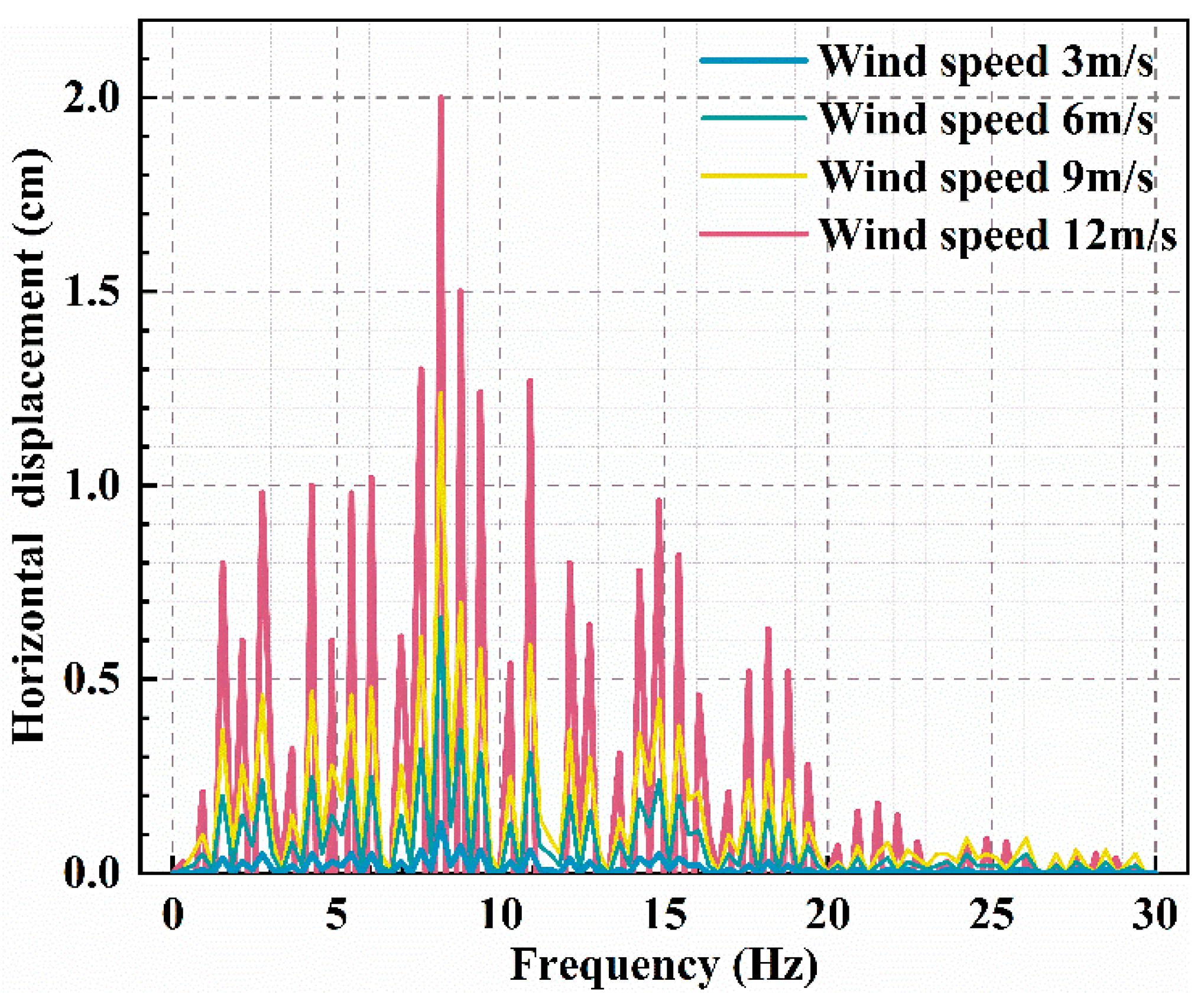
- (3)
- The analysis indicates that wind loads exert a negligible effect on the vertical displacements of the bridge while significantly influencing its lateral displacements. Wind loads introduce an additional force that affects the bridge’s horizontal vibration, especially under conditions of dense traffic and high wind speeds. Under such conditions, the maximum lateral displacement of the bridge induced by wind loads can reach up to 2 cm.
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, C.S.; Zhang, W.T.; Yang, M.Y. Shear lag effect of composite girders in cable-stayed bridges under dead loads. Eng. Struct. 2023, 281, 115752. [Google Scholar] [CrossRef]
- Wang, C.Y.; Chen, B.; Li, Y.L.; Wang, H.R.; Tan, L.G.; Zhang, Y.N.; Zhang, H. YOLOv8-CDD: An improved concrete defect detection method combined CNN with transformer. Meas. Sci. Technol. 2025, 36, 015409. [Google Scholar] [CrossRef]
- Hashlamon, I.; Nikbakht, E.; Topa, A.; Elhattab, A. Numerical Parametric Study on the Effectiveness of the Contact-Point Response of a Stationary Vehicle for Bridge Health Monitoring. Appl. Sci. 2021, 11, 7028. [Google Scholar] [CrossRef]
- Ge, S.W.; Zeng, J.; Jin, B.W.; Zhou, W.; Qin, X.L. Design wave calculation of a passenger catamaran under multiple load control parameters. Pol. Marit. Res. 2022, 29, 3–11. [Google Scholar] [CrossRef]
- Dong, S.H.; Liu, W.; Li, H.Y. Study on the Mechanical Properties and Durability of Tunnel Lining Concrete in Coastal Areas. Buildings 2024, 14, 2606. [Google Scholar] [CrossRef]
- Liu, Y.; Xu, H.D.; Xia, W.; Cai, W.F.; Zheng, S.L. Research on a Vibration Model of a Superstructure under the Vibration Load of Metro Trains. Buildings 2024, 14, 2342. [Google Scholar] [CrossRef]
- Song, J.; Fang, X.J.; Bi, K.M.; Ding, H.; Qin, H.L. Tuned inerter damper for adjacent bridges vibration control considering nonlinearities. Eng. Struct. 2025, 325, 119504. [Google Scholar] [CrossRef]
- Fang, C.; Li, Y.L.; Xu, Y.L. Nonlinear dynamic response of sea-crossing bridges to 3D correlated wind and wave loads. Adv. Struct. Eng. 2022, 25, 3268–3283. [Google Scholar] [CrossRef]
- Yang, X.Z.; Dong, Y.D.; Liu, X.; Qiu, T.; Zhou, J. Seismic Behavior of Concrete Beam-Column Joints Reinforced with Steel-Jacketed Grouting. Buildings 2024, 14, 3239. [Google Scholar] [CrossRef]
- Wu, Q.; Han, B.; Yu, J.P.; Yan, W.T.; Zhang, J.Q.; Xie, H.B. A Theoretical Model to Identify the Fundamental Frequency of Simply Supported Girders from a Passing Heavy Vehicle. Appl. Sci. 2022, 12, 2422. [Google Scholar] [CrossRef]
- Xu, C.Y.; Luo, H.; Gan, X.B.; Liu, M.G.; Guo, H. Train-Bridge Coupled Vibration of a Long-Span Steel Truss Suspension Bridge Under Complex Driving Conditions. Int. J. Struct. Stab. Dyn. 2025, 25, 2550006. [Google Scholar] [CrossRef]
- Chen, X.; Geng, X.; Fu, W.W.; Tan, L.H.; Guan, J.C.; Liu, T. Vibration serviceability assessment of ribbon-shaped large-span footbridge at high altitudes under wind-pedestrians coupling effects. Structures 2024, 66, 106885. [Google Scholar] [CrossRef]
- Zhao, J.; Wang, K.; Wu, D.; Huang, Q.; Yu, M. Optimization Strategy for Modal Test Measurement Points of Large-Span Steel Beams Based on Improved Particle Swarm Optimization Algorithm with Random Weights. Appl. Sci. 2022, 12, 12082. [Google Scholar] [CrossRef]
- Gao, J.; Yang, T.S.; Zhang, X. Life Prediction and Reliability Evaluation of Reinforced Concrete Frame Structures Considering the Collision Response under Earthquake Conditions. Buildings 2024, 14, 3357. [Google Scholar] [CrossRef]
- Yan, X.Y.; Zhao, Z.; He, H.X. Coupled Vibration of a Vehicle Group-Bridge System and Its Application in the Optimal Strategy for Bridge Health Monitoring. Appl. Sci. 2024, 14, 5236. [Google Scholar] [CrossRef]
- Wu, T.Y.; Qiu, W.L.; Wu, H.; Yao, G.W.; Guo, Z.W. Coupled Vibration Analysis of Ice-Wind-Vehicle-Bridge Interaction System. J. Mar. Sci. Eng. 2023, 11, 535. [Google Scholar] [CrossRef]
- Wang, S.Q.; Wan, X.; Guo, M.H.; Qiao, H. Dynamic response of long-span arch bridge and riding comfort under wind load. Ksce J. Civ. Eng. 2025, 29, 100021. [Google Scholar] [CrossRef]
- Zhang, N.; Ge, G.H.; Xia, H.; Li, X.Z. Dynamic analysis of coupled wind-train-bridge system considering tower shielding and triangular wind barriers. Wind Struct. 2015, 21, 311–329. [Google Scholar] [CrossRef]
- Li, D.S.; Hu, X.; Zhou, X.X.; Luo, W.; Zhu, A.X.; Yu, Z.Y. Modeling Random Exit Selection in Intercity Expressway Traffic with Quantum Walk. Appl. Sci. 2022, 12, 2139. [Google Scholar] [CrossRef]
- Wang, B.; Xia, C.P.; Min, Q.; Zhu, S.Y.; Li, Y.L. Dynamic Amplification Factors of an Arch Bridge Under Random Traffic Flows. Int. J. Struct. Stab. Dyn. 2024, 24, 2450064. [Google Scholar] [CrossRef]
- Yu, Y.X.; Guo, L.; Chen, Z.G.; Gao, H.L.; Shi, Z.F.; Zhang, G.L. Dynamics modelling and vibration characteristics of urban rail vehicle axle-box bearings with the cage crack. Mech. Syst. Signal Process. 2023, 205, 110870. [Google Scholar] [CrossRef]
- Li, Y.; Ren, W.Y.; Jin, D.P.; Hui, P.; Zeng, L.G.; Wu, D.P. Potential Predictability of Vehicular Staying Time for Large-Scale Urban Environment. IEEE Trans. Veh. Technol. 2014, 63, 322–343. [Google Scholar] [CrossRef]
- Wu, G.X.; Shi, F.Y.; Kirby, J.T.; Liang, B.C.; Shi, J. Modeling wave effects on storm surge and coastal inundation. Coast. Eng. 2018, 140, 371–382. [Google Scholar] [CrossRef]
- Ahmad, I.; Noor, R.M.; Ali, I.; Imran, M.; Vasilakos, A. Characterizing the role of vehicular cloud computing in road traffic management. Int. J. Distrib. Sens. Netw. 2017, 13, 155014771770872. [Google Scholar] [CrossRef]
- Sitton, J.D.; Zeinali, Y.; Rajan, D.; Story, B.A. Frequency Estimation on Two-Span Continuous Bridges Using Dynamic Responses of Passing Vehicles. J. Eng. Mech. 2020, 146, 04019115. [Google Scholar] [CrossRef]
- Khattra, S.K.; Rai, H.S.; Singh, J. Towards Automated Structural Stability Design of Buildings—A BIM-Based Solution. Buildings 2022, 12, 451. [Google Scholar] [CrossRef]
- Zhou, S.H.; Song, G.Q.; Wang, R.P.; Ren, Z.H.; Wen, B.C. Nonlinear dynamic analysis for coupled vehicle-bridge vibration system on nonlinear foundation. Mech. Syst. Signal Process. 2017, 87, 259–278. [Google Scholar] [CrossRef]
- Vahidi-Moghaddam, A.; Rajaei, A.; Yazdi, E.A.; Eghtesad, M.; Necsulescu, D.S. Nonlinear forced vibrations of nonlocal strain gradient microbeams. Mech. Based Des. Struct. Mach. 2023, 51, 1035–1053. [Google Scholar] [CrossRef]
- Yin, X.; Xiao, S.; Feng, K.; Huang, Z.; Zuo, L.; Quan, Y. Three-Dimensional Stochastic Traffic-Bridge Coupled Vibration Analysis Considering Combined Wind-Wave Action. Int. J. Struct. Stab. Dyn. 2025. [Google Scholar] [CrossRef]
- Zinno, R.; Haghshenas, S.S.; Guido, G.; VItale, A. Artificial Intelligence and Structural Health Monitoring of Bridges: A Review of the State-of-the-Art. IEEE Access. 2022, 10, 88058–88078. [Google Scholar] [CrossRef]
- Melchiorre, J.; D’Amato, L.; Agostini, F.; Rizzo, A.M. Acoustic emission onset time detection for structural monitoring with U-Net neural network architecture. Dev. Built Environ. 2024, 18, 100449. [Google Scholar] [CrossRef]
- Zhou, Y.F.; Chen, S.R. Dynamic Simulation of a Long-Span Bridge-Traffic System Subjected to Combined Service and Extreme Loads. J. Struct. Eng. 2015, 141, 04014215. [Google Scholar] [CrossRef]
- Yin, X.F.; Huang, Z.; Liu, Y. Framework of vehicle-bridge coupled analysis for suspension bridges under refined vehicle modeling considering realistic traffic behavior. Structures 2023, 47, 1991–2005. [Google Scholar] [CrossRef]
- Wei, K.; Bai, Z.Y.; Zhang, J.T.; Yang, Q.S. Numerical investigation into the dynamic response of a long-span floating suspension bridge under random traffic flow loads. Ocean Eng. 2025, 326, 120888. [Google Scholar] [CrossRef]
- Huang, Z.; Yin, X.F.; Quan, Y.; Liu, Y.; Xiang, P. Stochastic vibration prediction of long-span bridges under traffic load based on deep neural network of multi-mode information fusion. Adv. Eng. Softw. 2025, 207, 103953. [Google Scholar] [CrossRef]
- Shen, Y.B.; Lin, Z.Y.; Wang, Z.F. Single-Side Accumulative Jacking Construction Method for Large-Span Arched Latticed Shells. J. Constr. Eng. Manag. 2022, 148, 06022001. [Google Scholar] [CrossRef]
- Chen, Y.M.; Liao, Y.; Zhu, L.M.; Chen, L.K.; Chen, Y.L. Robustness of a Steel Truss Bridge Subjected to Sudden Member Breakage during the Continuous-to-Simply-Supported Transition. Buildings 2024, 14, 3035. [Google Scholar] [CrossRef]
- Zhang, W.; Cai, C.S. Fatigue Reliability Assessment for Existing Bridges Considering Vehicle Speed and Road Surface Conditions. J. Bridge Eng. 2012, 17, 443–453. [Google Scholar] [CrossRef]
- Zhang, X.B.; Wang, J.; Chen, Z.Z.; Quan, Y.; Zheng, Z.Z.; Zhang, T.Y.; Cao, J.; Xie, X.N.; Liu, X.C.; Xiang, P. A distributed fiber optic sensor-based approach for crack asphalt structure under freeze-thaw cycling tests. Constr. Build. Mater. 2025, 476, 141262. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Elastic Modulus (GPA) | Poisson Ratio | Density (kg· m−3) |
|---|---|---|---|
| Main girder | 206 | 0.30 | 7850 |
| Cables | 201 | 0.30 | 7800 |
| Pier | 31.0 | 0.20 | 2400 |
| Pylon | 34.5 | 0.23 | 2500 |
| Lanes | Class 1 Car (veh) | Class 2 Car (veh) | Class 3 Car (veh) | Class 4 Car (veh) | Class 5 Car (veh) | Class 6 Car (veh) |
|---|---|---|---|---|---|---|
| 1–4 lanes | 5112 | 2903 | 1412 | 856 | 443 | 48 |
| 5–8 lanes | 4833 | 2823 | 1325 | 721 | 313 | 33 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, R.; Quan, Y.; Wang, J.; Li, L.; Ge, D.; Guo, S.; Hu, Y.; Xiang, P. Dynamic Interaction Analysis of Long-Span Bridges Under Stochastic Traffic and Wind Loads. Appl. Sci. 2025, 15, 7577. https://doi.org/10.3390/app15137577
Wu R, Quan Y, Wang J, Li L, Ge D, Guo S, Hu Y, Xiang P. Dynamic Interaction Analysis of Long-Span Bridges Under Stochastic Traffic and Wind Loads. Applied Sciences. 2025; 15(13):7577. https://doi.org/10.3390/app15137577
Chicago/Turabian StyleWu, Ruien, Yang Quan, Jia Wang, Le Li, Dingfu Ge, Siman Guo, Yaoyu Hu, and Ping Xiang. 2025. "Dynamic Interaction Analysis of Long-Span Bridges Under Stochastic Traffic and Wind Loads" Applied Sciences 15, no. 13: 7577. https://doi.org/10.3390/app15137577
APA StyleWu, R., Quan, Y., Wang, J., Li, L., Ge, D., Guo, S., Hu, Y., & Xiang, P. (2025). Dynamic Interaction Analysis of Long-Span Bridges Under Stochastic Traffic and Wind Loads. Applied Sciences, 15(13), 7577. https://doi.org/10.3390/app15137577