

Progressive Landslide Prediction Using an Inverse Velocity Method with Multiple Monitoring Points of Synthetic Aperture Radar

 , ,
, ,
Abstract
1. Introduction
2. Materials and Methods
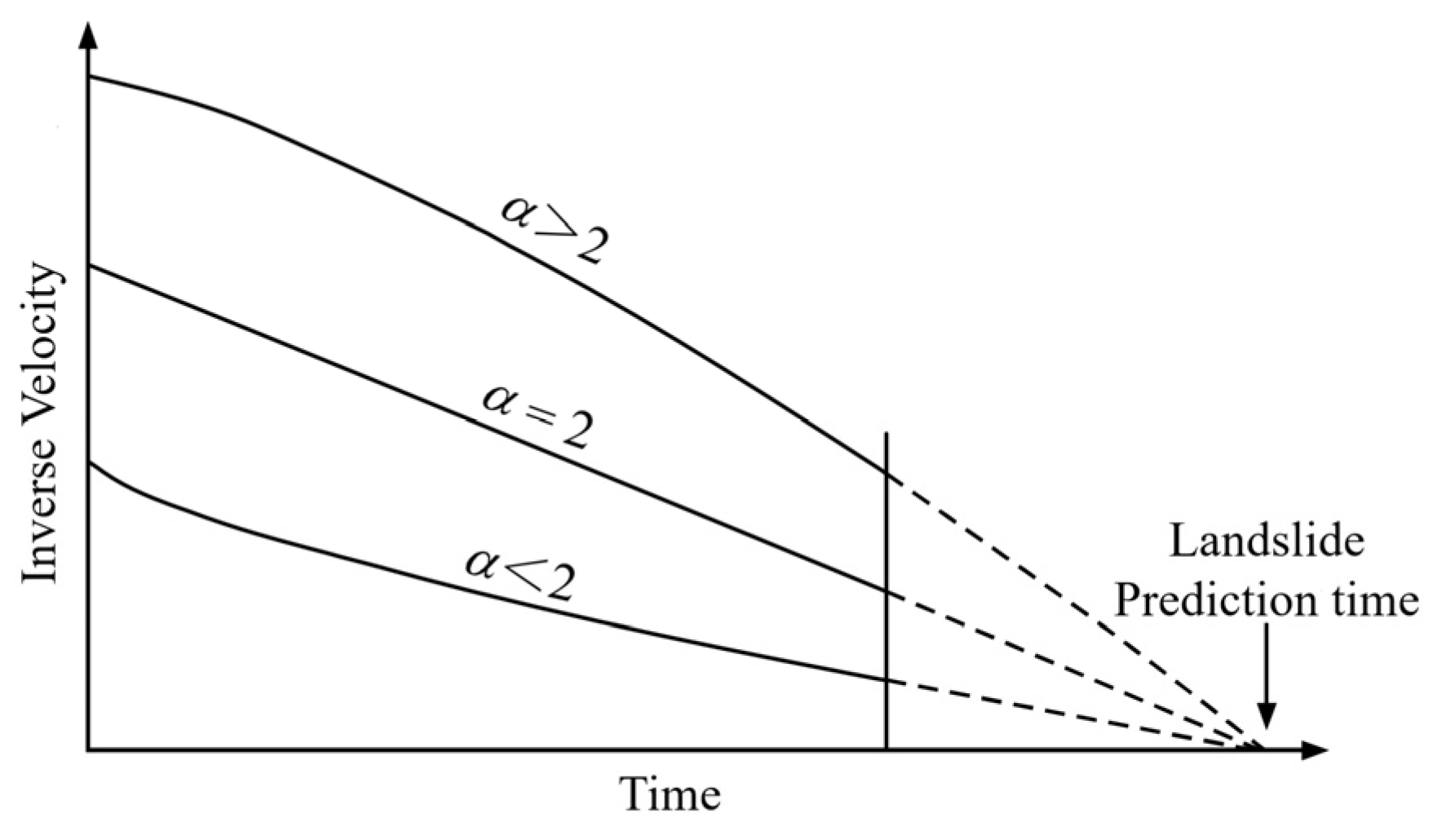
2.1. Principles of the Inverse Velocity Method (INV)
2.2. Principle of Nonlinear Least Squares
2.3. Principles of Slope Radar Monitoring
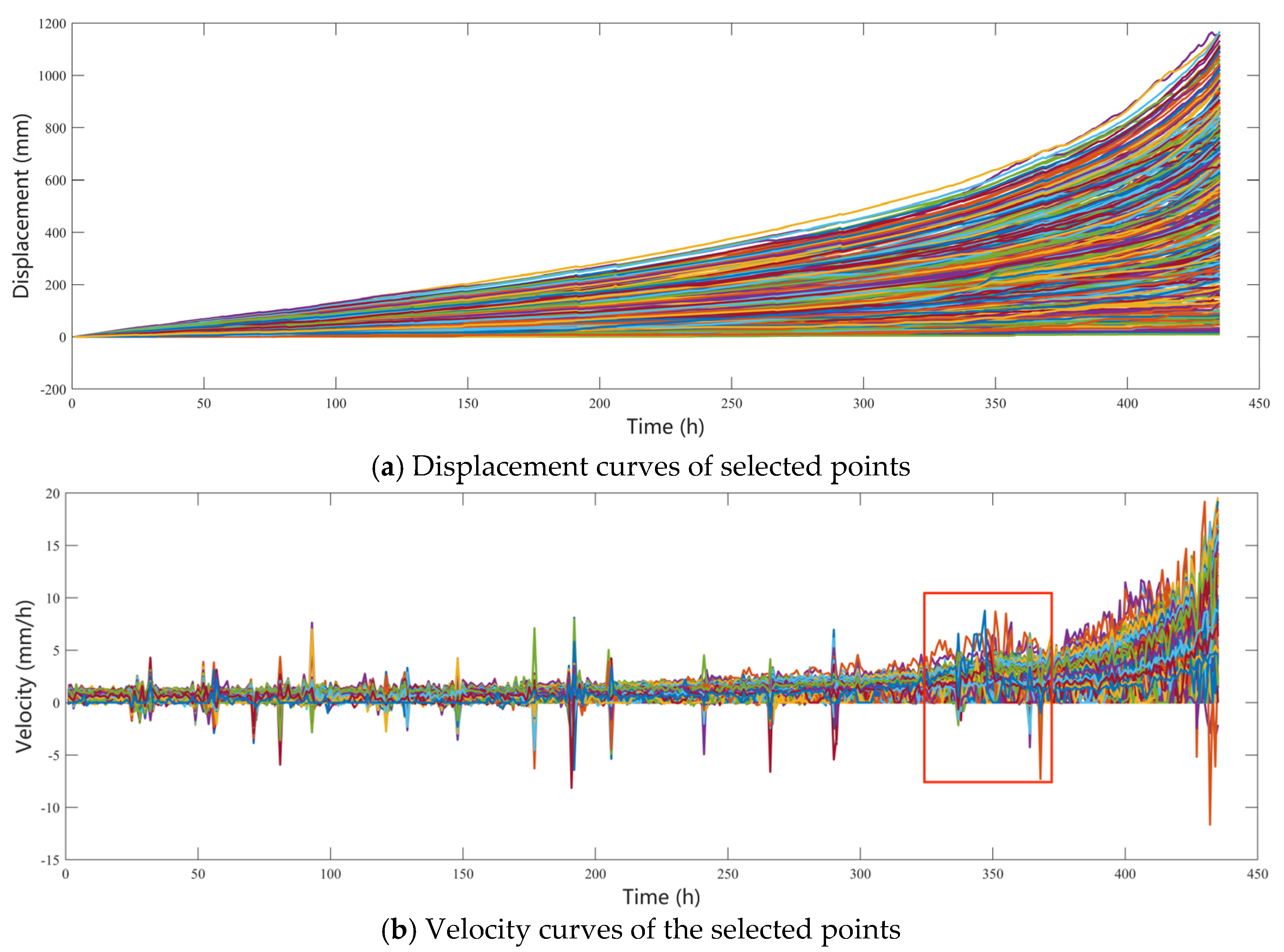
3. Mine Overview and Monitoring Data
4. Results
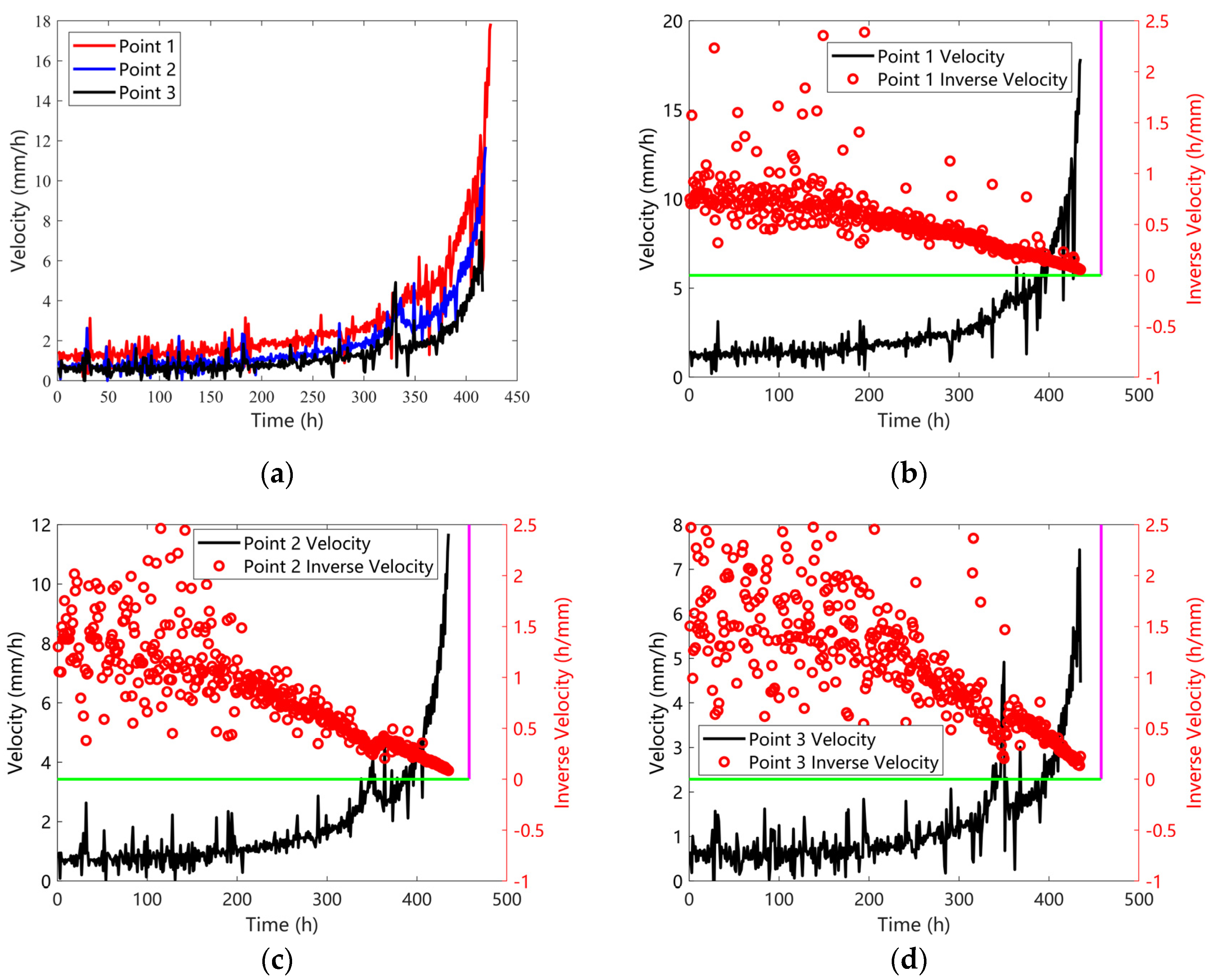
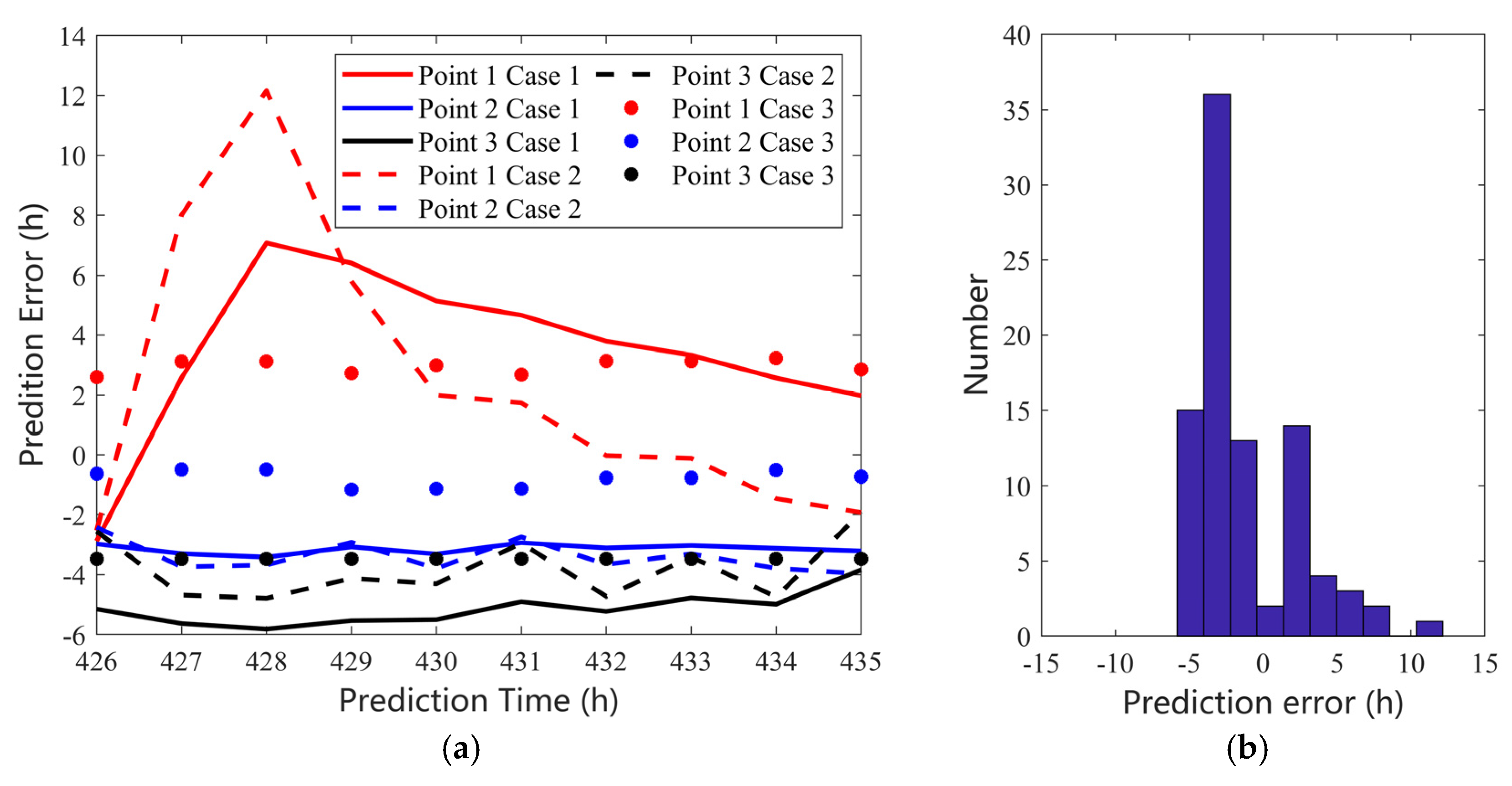
4.1. Single-Point Prediction Results
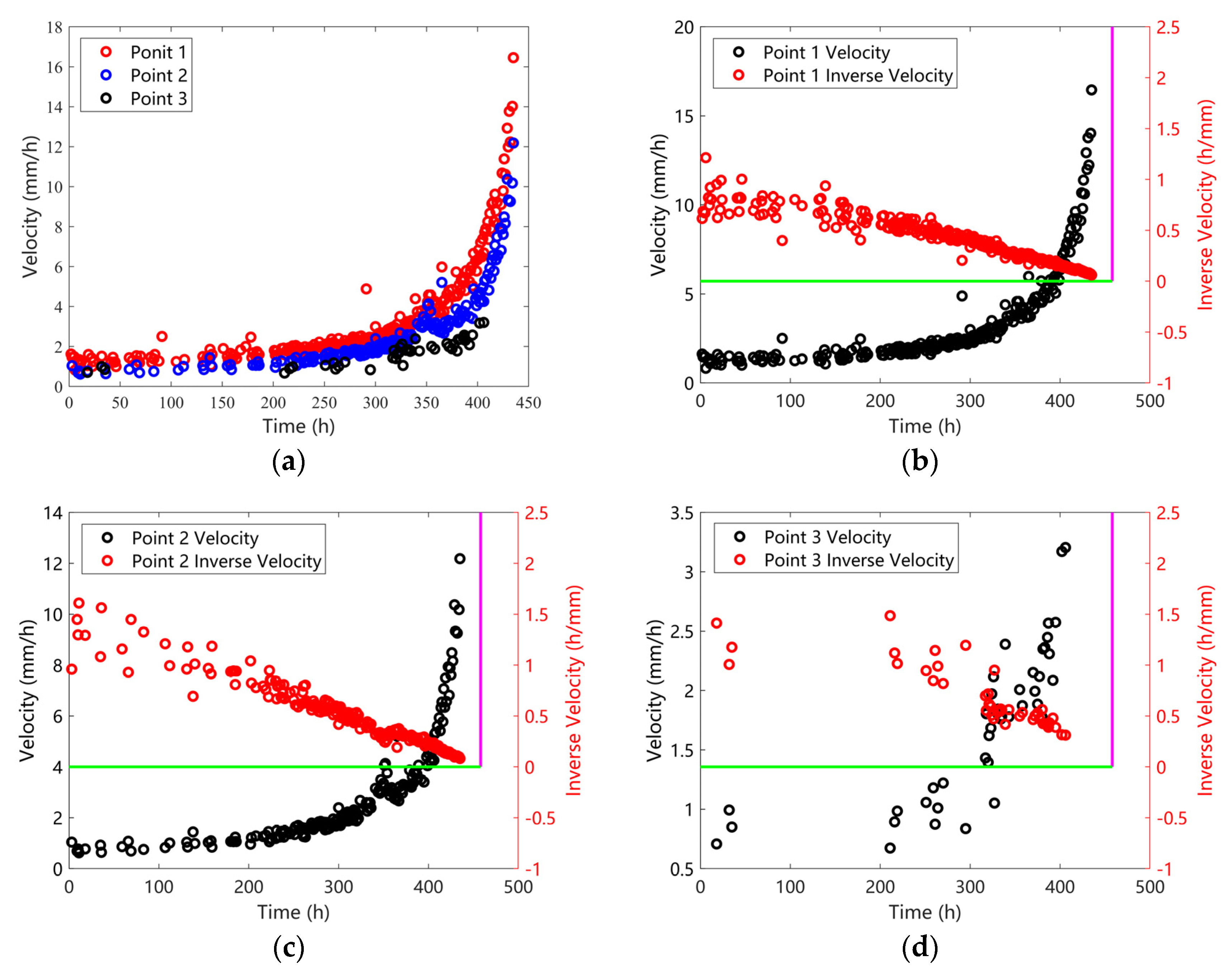
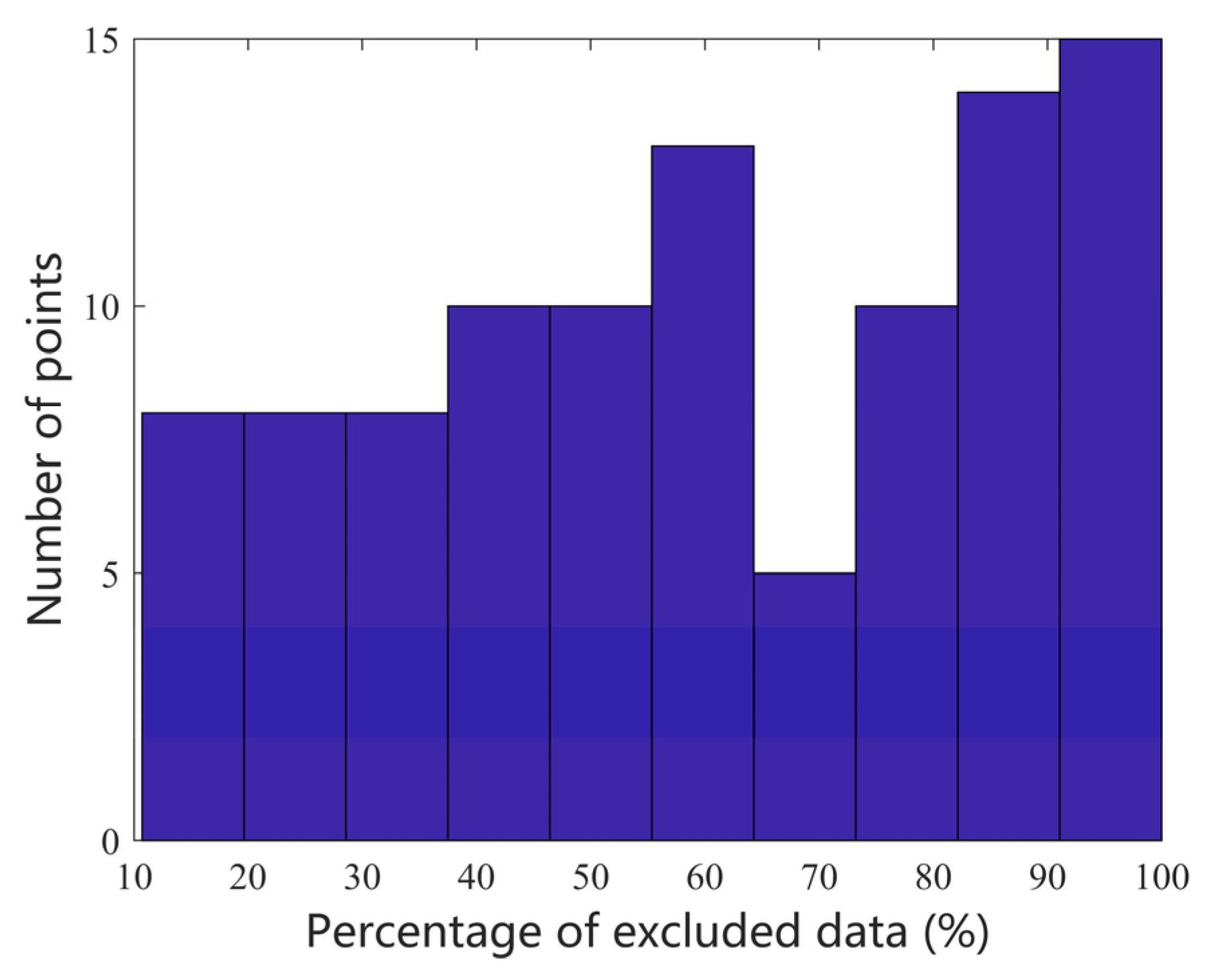
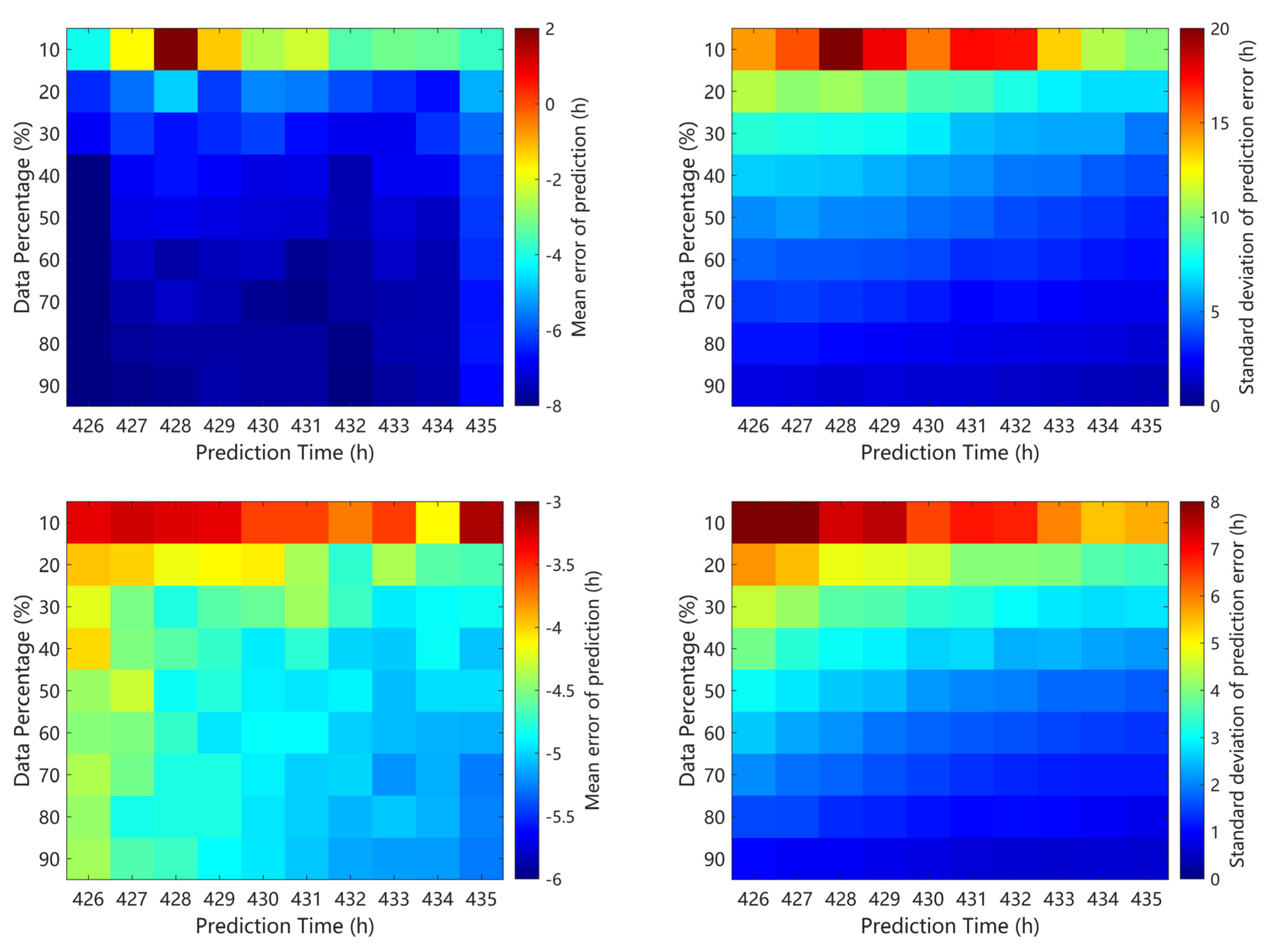
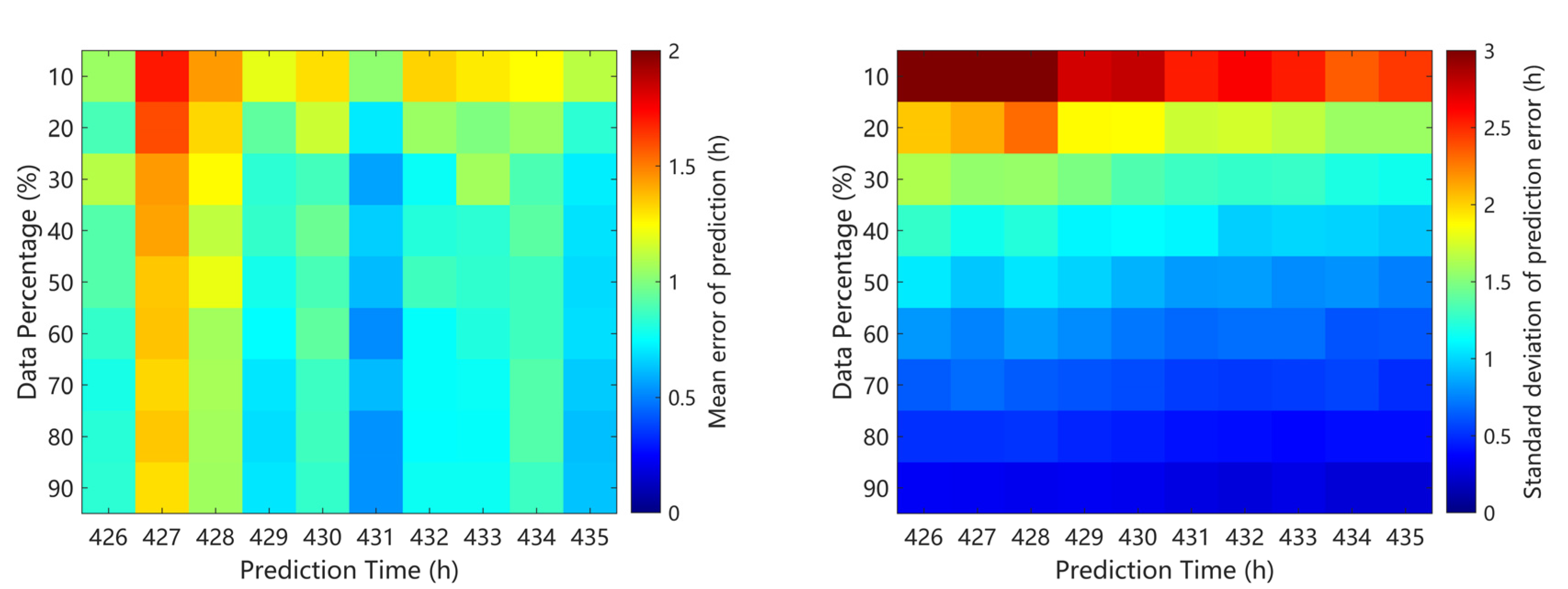
4.2. Multi-Point Joint Predictions
5. Discussion
6. Conclusions
- (1)
- A novel multi-point joint inverse velocity method for landslide time prediction is developed, which achieves prediction errors consistently constrained within 1 h. Minimal discrepancies (<2 h) were observed based on strict data exclusion, with enhanced stability and reliability emerging proportionally to the number of displacement monitoring points incorporated.
- (2)
- Point groups distributed across different landslide sectors can all be utilized for inverse velocity method-based failure time prediction, with variations in the slope of the inverse velocity fitting line reflecting spatial heterogeneity.
- (3)
- Single-point deformation velocity monitoring data yield inverse velocity method predictions with stochastic error distributions and limited stability.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| INV | inverse velocity method |
| SSAR | slope synthetic aperture radar |
| LOS | line-of-sight |
References
- Gong, W.; Zhang, S.; Juang, C.H.; Tang, H.; Pudasaini, S.P. Displacement prediction of landslides at slope-scale: Review of physics-based and data-driven approaches. Earth-Sci. Rev. 2024, 258, 104948. [Google Scholar] [CrossRef]
- Fukuzono, T. A simple method for predicting the failure time of slope using reciprocal of velocity. Technol. Disaster Prev. Sci. Technol. Agency 1989, 13, 111–128. [Google Scholar]
- Zhou, X.P.; Liu, L.J.; Xu, C. A modified inverse-velocity method for predicting the failure time of landslides. Eng. Geol. 2020, 268, 105521. [Google Scholar] [CrossRef]
- Wang, J.-Z.; Ju, N.-P.; Tie, Y.-B.; Bai, Y.-J.; Ge, H. A framework for identifying the onset of landslide acceleration based on the exponential moving average (EMA). J. Mt. Sci. 2023, 20, 1639–1649. [Google Scholar] [CrossRef]
- Tao, Y.; Zhang, R.; Du, H. Failure Prediction of Open-Pit Mine Landslides Containing Complex Geological Structures Using the Inverse Velocity Method. Water 2024, 16, 430. [Google Scholar] [CrossRef]
- Petley, D.N.; Bulmer, M.H.; Murphy, W. Patterns of movement in rotational and translational landslides. Geology 2002, 30, 719–722. [Google Scholar] [CrossRef]
- Rose, N.D.; Hungr, O. Forecasting potential rock slope failure in open pit mines using the inverse-velocity method. Int. J. Rock Mech. Min. Sci. 2007, 44, 308–320. [Google Scholar] [CrossRef]
- Dick, G.J.; Eberhardt, E.; Cabrejo-Liévano, A.G.; Stead, D.; Rose, N.D. Development of an early-warning time-of-failure analysis methodology for open-pit mine slopes utilizing ground-based slope stability radar monitoring data. Can. Geotech. J. 2015, 52, 515–529. [Google Scholar] [CrossRef]
- Wang, Y.P.; Xu, Q.; Zheng, G.; Zheng, H. A rheology experimental investigation on early warning model for landslide based on inverse-velocity method. Rock Soil Mech. 2015, 36, 1606–1614. [Google Scholar]
- Iwat, N.; Sasahara, K.; Watanabe, S. Improvement of Fukuzono’s Model for Time Prediction of an Onset of a Rainfall-Induced Landslide. In Proceedings of the 4th World Landslide Forum, Ljubljana, Slovenia, 30 May–2 June 2017. [Google Scholar]
- Qi, L.; Tan, W.; Huang, P.; Xu, W.; Qi, Y.; Zhang, M. Landslide prediction method based on a ground-based micro-deformation monitoring radar. Remote Sens. 2020, 12, 1230. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, Z.; Hu, J.; Xiao, S.; Shang, W. Bayesian machine learning-based method for prediction of slope failure time. J. Rock Mech. Geotech. Eng. 2022, 14, 1188–1199. [Google Scholar] [CrossRef]
- Ma, H.T.; Zhang, Y.H.; Yu, Z.X. Research on the identification of acceleration starting point in inverse velocity method and the prediction of sliding time. Chin. J. Rock Mech. Eng. 2021, 40, 355–364. [Google Scholar]
- Du, H.; Song, D. Investigation of failure prediction of open-pit coal mine landslides containing complex geological structures using the inverse velocity method. Nat. Hazards 2022, 111, 2819–2854. [Google Scholar] [CrossRef]
- Sharifi, S.; Macciotta, R.; Hendry, M.T. Critical assessment of landslide failure forecasting methods with case histories: A comparative study of INV, MINV, SLO, and VOA. Landslides 2024, 21, 1629–1643. [Google Scholar] [CrossRef]
- Voight, B. A method for prediction of volcanic eruptions. Nature 1988, 332, 125–130. [Google Scholar] [CrossRef]
- Voight, B. A relation to describe rate-dependent material failure. Science 1989, 243, 200–203. [Google Scholar] [CrossRef]
- Massonnet, D.; Feigl, K.L. Radar interferometry and its application to changes in the Earth’s surface. Rev. Geophys. 1998, 36, 441–500. [Google Scholar] [CrossRef]
- Osasan, K.S.; Afeni, T.B. Review of surface mine slope monitoring techniques. J. Min. Sci. 2010, 46, 177–186. [Google Scholar] [CrossRef]
- Severin, J.; Eberhardt, E.; Leoni, L.; Fortin, S. Development and application of a pseudo-3D pit Slope displacement map derived from ground-based Radar. Eng. Geol. 2014, 181, 202–211. [Google Scholar] [CrossRef]
- Caduff, R.; Schlunegger, F.; Kos, A.; Wiesmann, A. A review of terrestrial radar interferometry for measuring surface change in the geosciences. Earth Surf. Process. Landf. 2015, 40, 208–228. [Google Scholar] [CrossRef]
- Carlà, T.; Intrieri, E.; Di Traglia, F.; Nolesini, T.; Gigli, G.; Casagli, N. Guidelines on the use of inverse velocity method as a tool for setting alarm thresholds and forecasting landslides and structure collapses. Landslides 2017, 14, 517–534. [Google Scholar] [CrossRef]
- Gül, Y.; Hastaoğlu, K.Ö.; Poyraz, F. Using the GNSS method assisted with UAV photogrammetry to monitor and determine deformations of a dump site of three open-pit marble mines in Eliktekke region, Amasya province, Turkey. Environ. Earth Sci. 2020, 79, 248. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technical Parameters and Units | Numerical Value |
|---|---|
| Usage frequency (GHz) | 17~18 |
| Monitoring accuracy (mm) | 0.1 |
| Distance resolution (m) | 0.15~0.3 |
| Azimuthal resolution (mrad) | 4~10 |
| Collection frequency (min) | 1–10 |
| Prediction Errors (h) | Case 1 | Case 2 | Case 3 |
|---|---|---|---|
| Point 1 | 1.98 | −1.93 | 2.85 |
| Point 2 | −3.21 | −3.97 | −0.73 |
| Point 3 | −3.84 | −1.92 | −3.47 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, Y.; Zhang, Y.; Yu, Z.; Ma, M.; Hou, S.; Ma, H. Progressive Landslide Prediction Using an Inverse Velocity Method with Multiple Monitoring Points of Synthetic Aperture Radar. Appl. Sci. 2025, 15, 7449. https://doi.org/10.3390/app15137449
Ren Y, Zhang Y, Yu Z, Ma M, Hou S, Ma H. Progressive Landslide Prediction Using an Inverse Velocity Method with Multiple Monitoring Points of Synthetic Aperture Radar. Applied Sciences. 2025; 15(13):7449. https://doi.org/10.3390/app15137449
Chicago/Turabian StyleRen, Yi, Yihai Zhang, Zhengxing Yu, Mengxiang Ma, Shanshan Hou, and Haitao Ma. 2025. "Progressive Landslide Prediction Using an Inverse Velocity Method with Multiple Monitoring Points of Synthetic Aperture Radar" Applied Sciences 15, no. 13: 7449. https://doi.org/10.3390/app15137449
APA StyleRen, Y., Zhang, Y., Yu, Z., Ma, M., Hou, S., & Ma, H. (2025). Progressive Landslide Prediction Using an Inverse Velocity Method with Multiple Monitoring Points of Synthetic Aperture Radar. Applied Sciences, 15(13), 7449. https://doi.org/10.3390/app15137449