
High-Resolution Mapping and Biomass Estimation of Suaeda salsa in Coastal Wetlands Using UAV Visible-Light Imagery and Hue Angle Inversion

 , ,
, ,
Abstract
1. Introduction
2. Materials and Methods
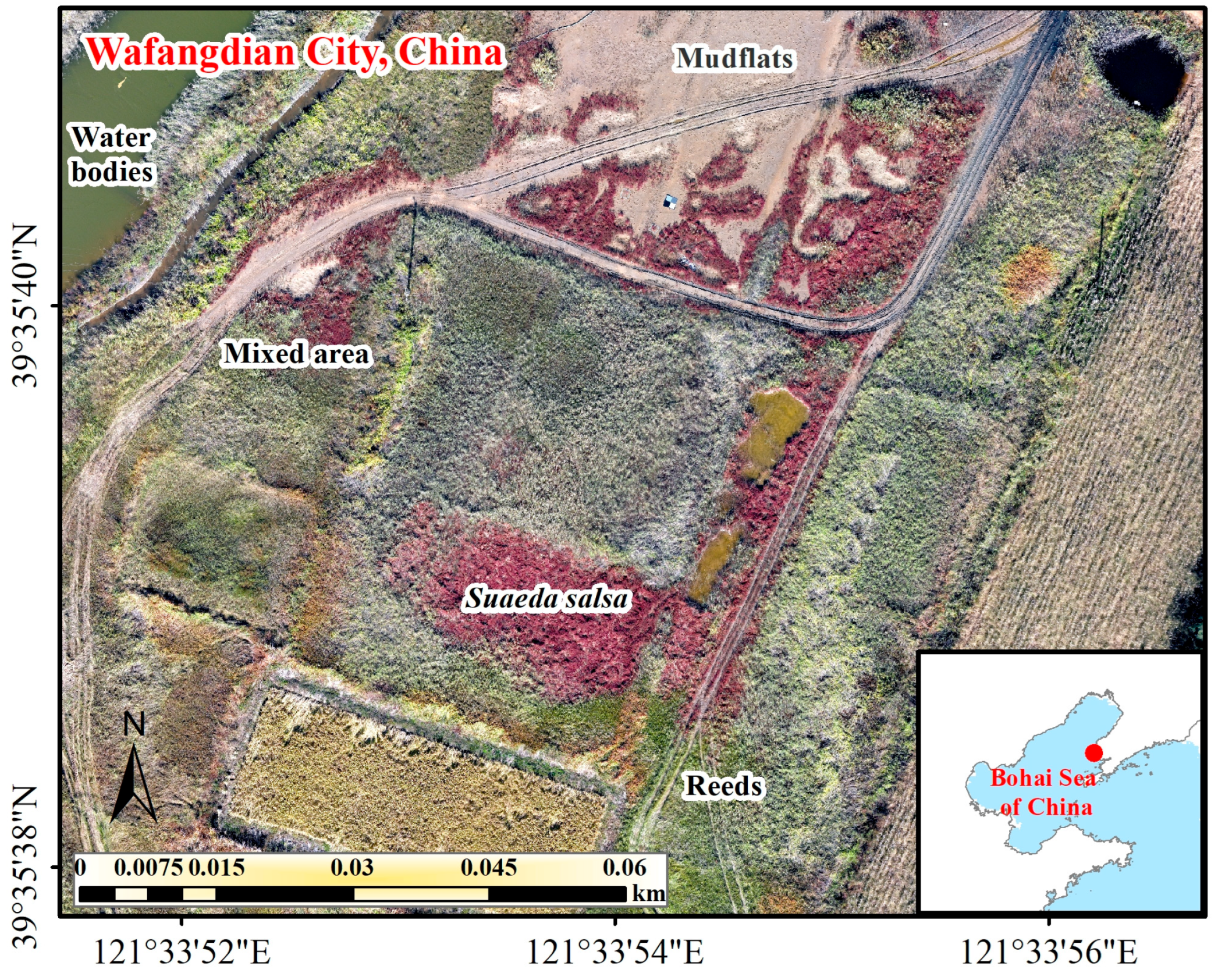
2.1. The Experimental Area
2.2. Design of Experiments
- (a)
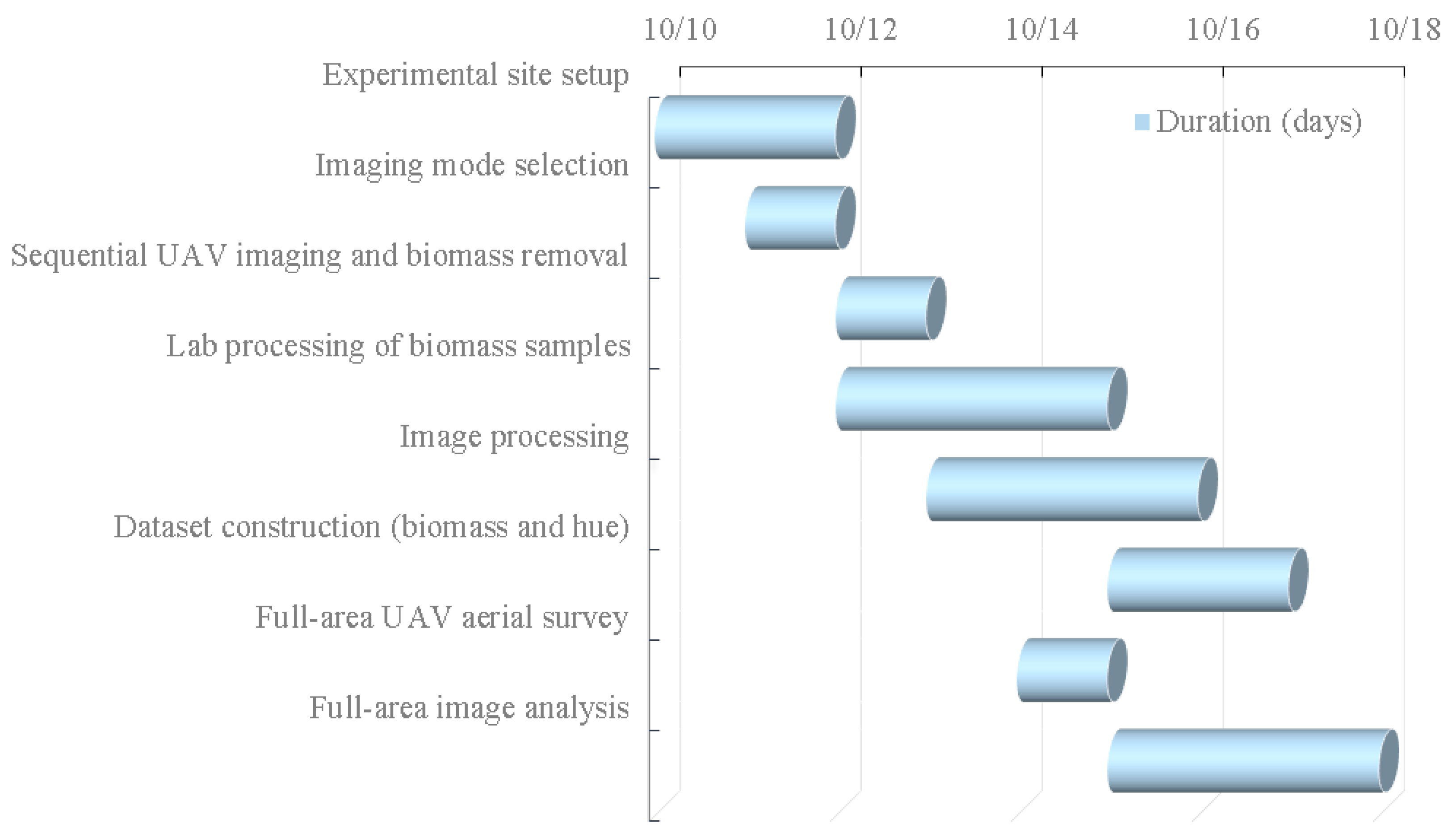
- Experimental Site Setup (Figure 3a): Prior to measurements, the area with the highest density of Suaeda salsa was identified and designated as the initial quadrat, representing the maximum biomass. The quadrat was then secured, and DRSPs were positioned in an adjacent open area for calibration purposes.
- (b)
- UAV Camera Parameter Configuration and Initial Imaging: To ensure consistent illumination throughout data collection, the visible-light camera’s exposure settings—including aperture, shutter speed, and ISO—were fixed before flight. A single-frame shooting mode was employed to capture high-resolution imagery of the Suaeda salsa quadrat.
- (c)
- Sequential UAV Imaging and Biomass Removal (Figure 3b): The UAV ascended to a fixed altitude of approximately 25 m to capture an initial image of the quadrat at its maximum Suaeda salsa biomass. Subsequently, portions of Suaeda salsa within the quadrat were evenly removed to incrementally reduce biomass. After each removal, another UAV image was captured, and the removed plant material was sealed in labeled bags for subsequent biomass analysis. This iterative process of incremental Suaeda salsa removal, UAV image acquisition, and sample storage continued until the quadrat was completely cleared.
- (d)
- Laboratory Processing of Biomass Samples: Upon the completion of UAV imaging, all plant samples were promptly transported to the laboratory. Roots were thoroughly rinsed with clean water to remove soil residues. Each sample was then wrapped in aluminum foil and oven-dried to a constant weight, and its dry biomass was meticulously recorded according to the sample labels.
- (e)
- Image Processing: For each UAV image, the quadrat-corresponding area was accurately extracted. The hue angle was subsequently calculated for this region, and the average hue angle was determined for further analysis.
- (f)
- Model Dataset Construction: Based on the sequential biomass removal, the Suaeda salsa biomass within the quadrat (expressed in kg/m2) was calculated for each UAV capture. This yielded a robust modeling dataset linking varying biomass levels with their corresponding mean hue angles.
2.3. Data Preprocessing
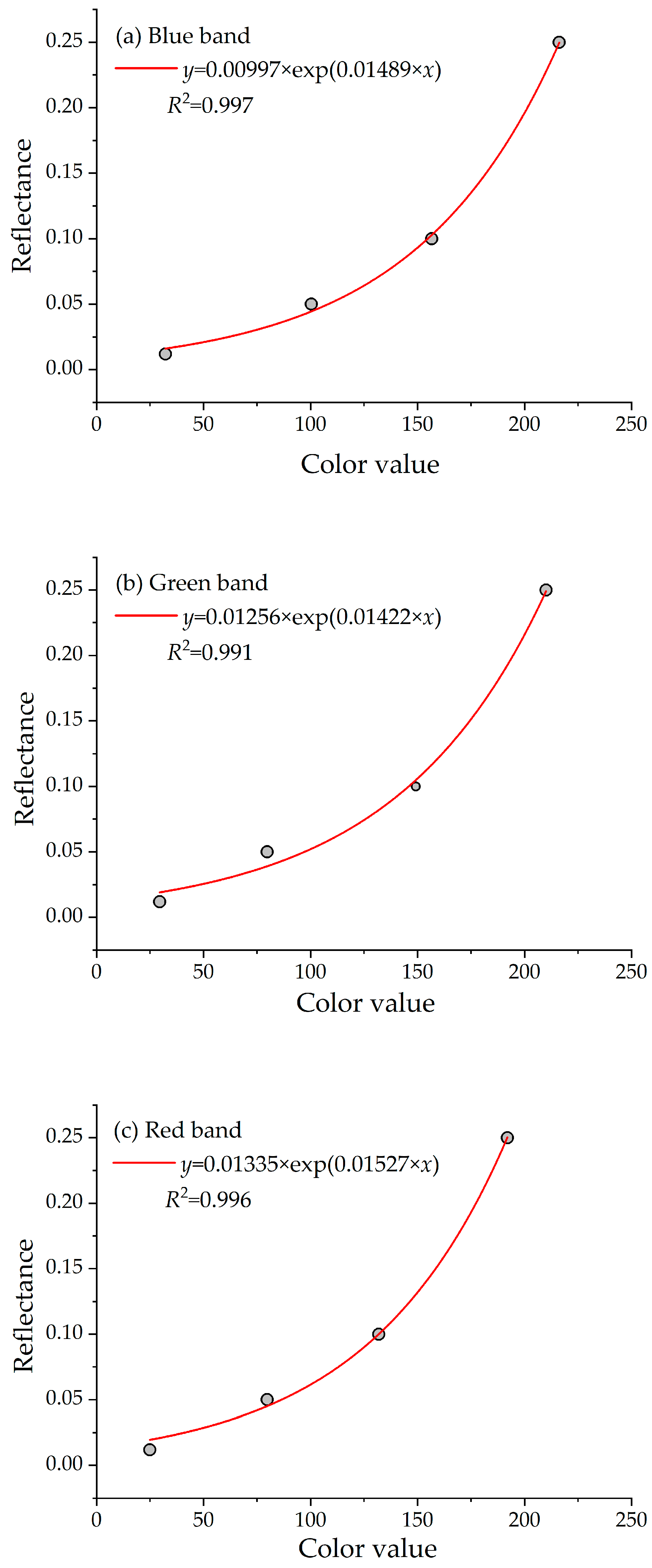
2.3.1. Reflectance Conversion Method
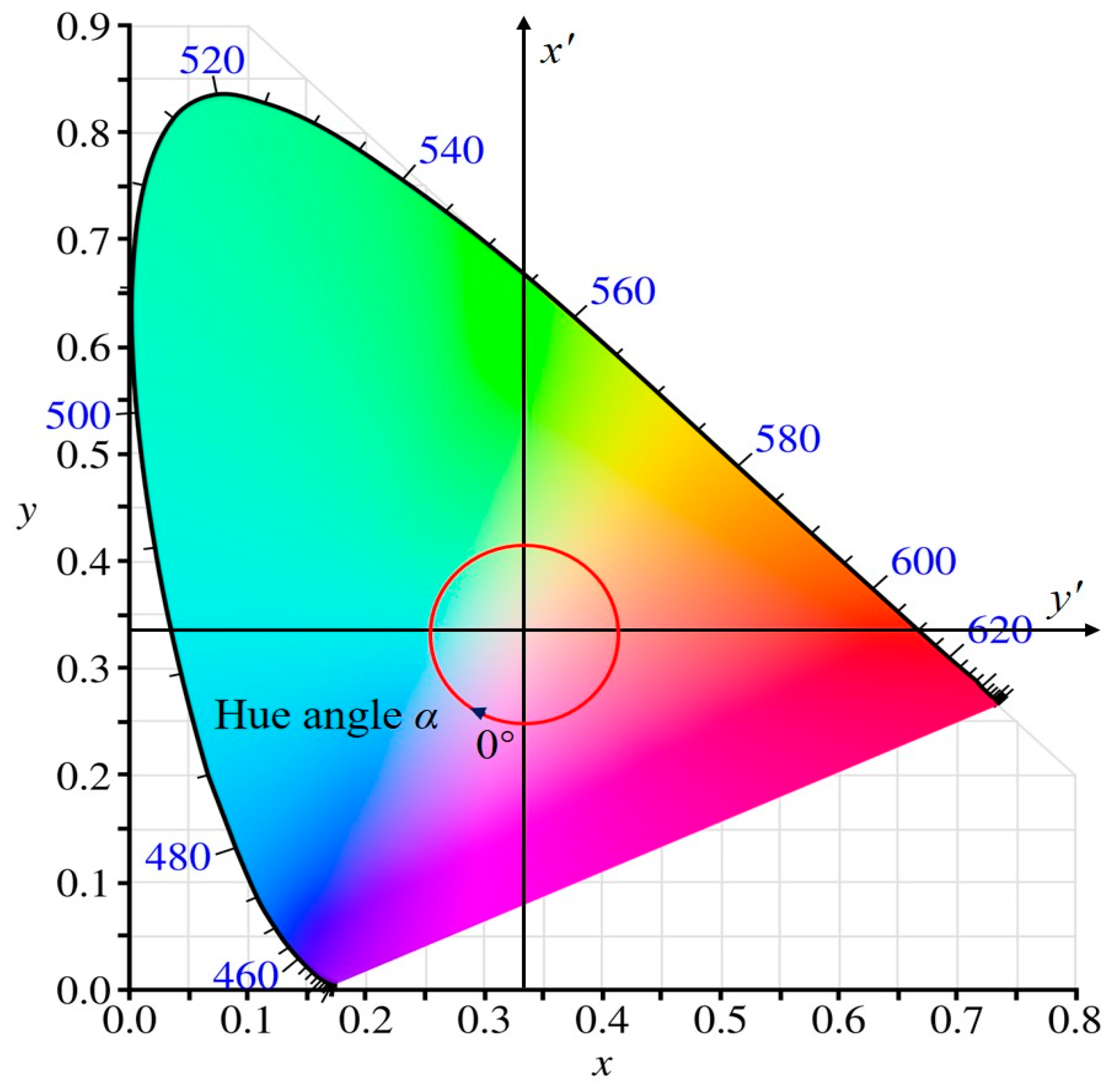
2.3.2. Methods for Calculating Hue Angle
2.4. Evaluation Method
3. Results
3.1. Reflectance Conversion
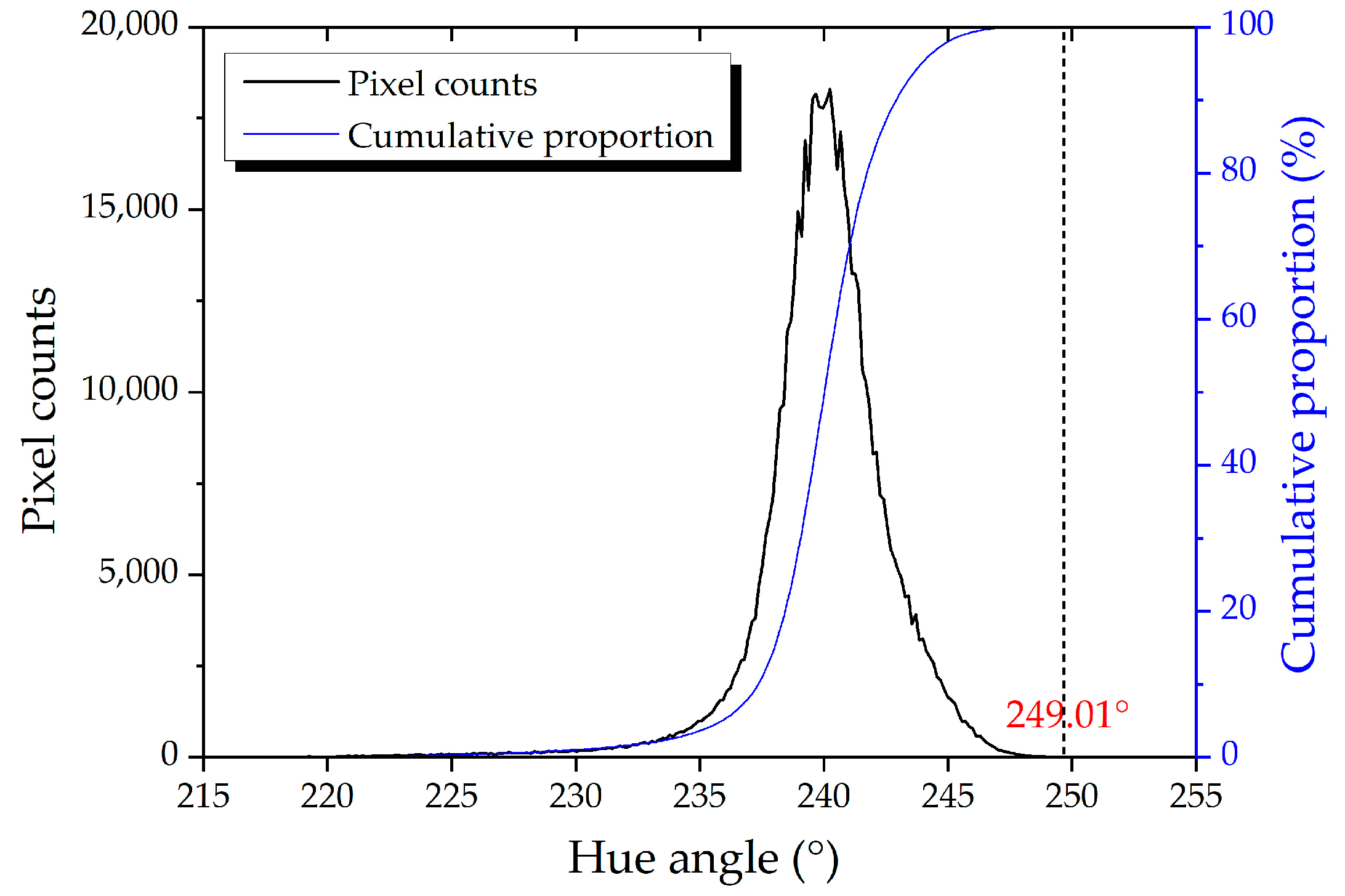
3.2. Hue Angle Cutoff Threshold
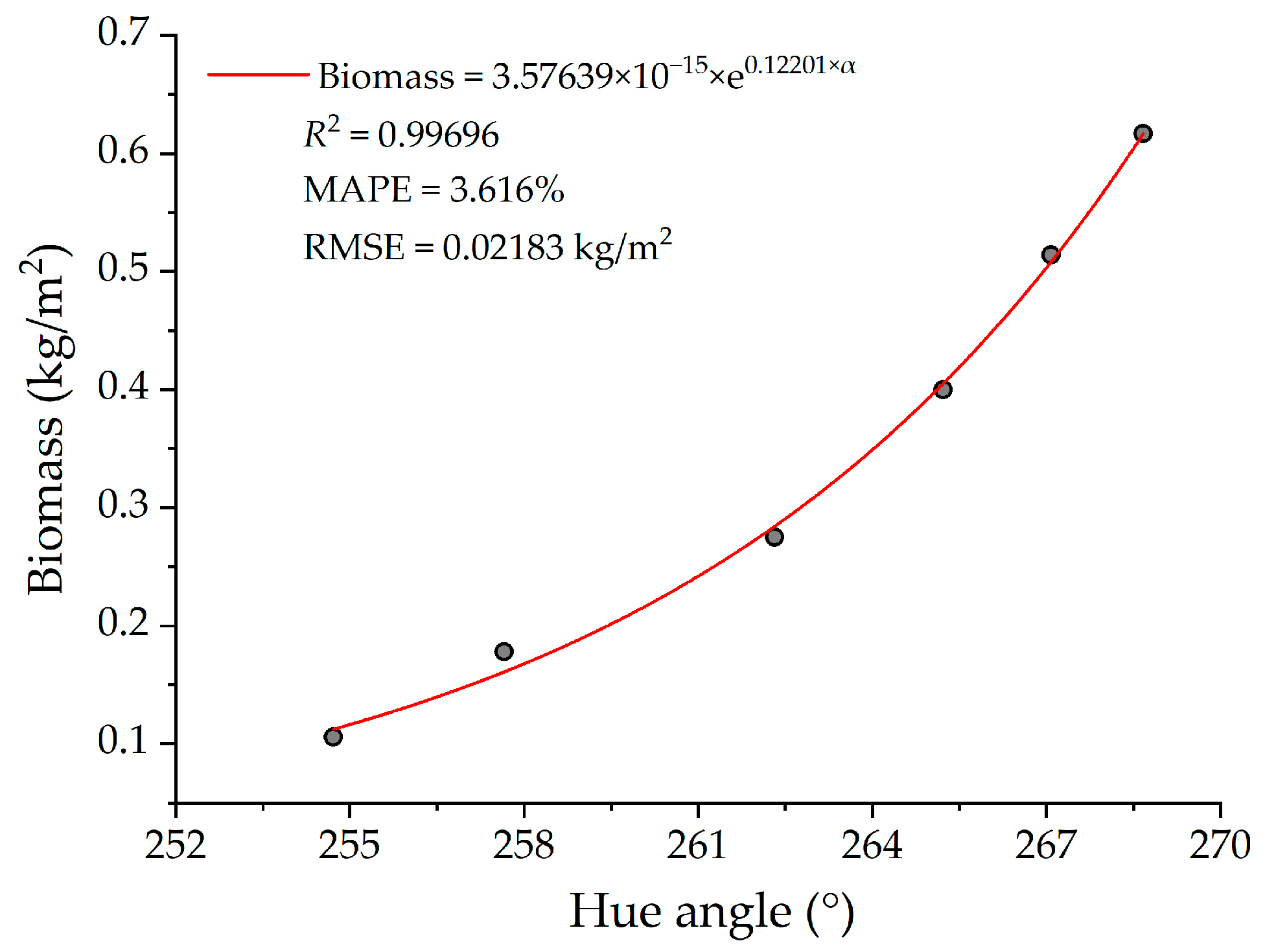
3.3. Inversion Model Construction
4. Discussion
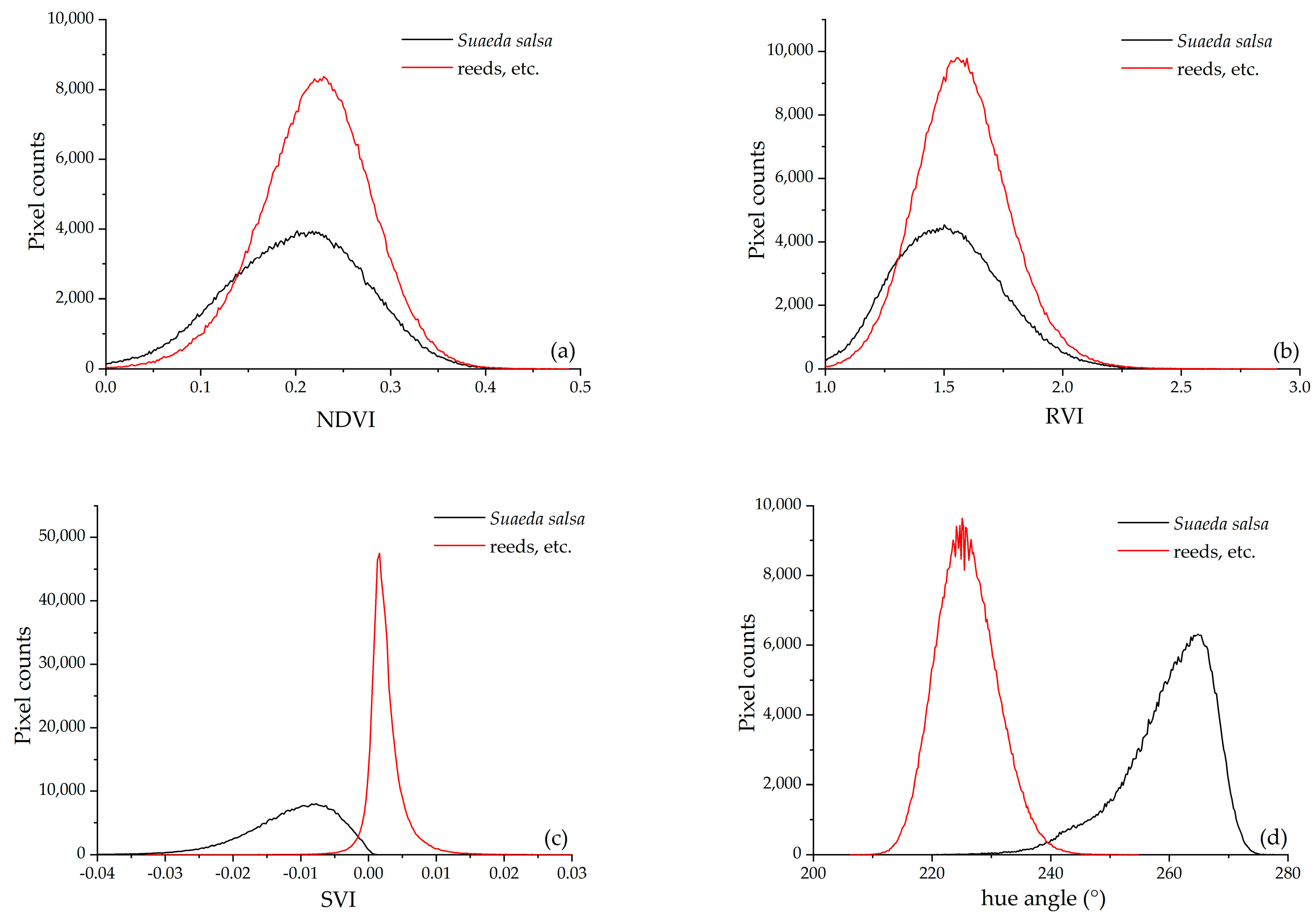
4.1. Applying Vegetation Indices to Extract Suaeda salsa from UAV Imagery
4.2. Factors Influencing Quantitative Inversion Using UAV Visible Imagery
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Feng, Y.; Xu, X.; Liu, J.; Han, J.; Lu, H. Planting Suaeda salsa improved the soil properties and bacterial community diversity in a coastal mudflat. Land Degrad. Dev. 2023, 34, 3262–3271. [Google Scholar] [CrossRef]
- Wang, F.; Tang, J.; Ye, S.; Lliu, J. Blue carbon sink function of Chinese coastal wetlands and carbon neutrality strategy. Bull. Chin. Acad. Sci. (Chin. Version) 2021, 36, 241–251. [Google Scholar]
- Fu, X.; Liu, G.; Huang, C.; Liu, Q. Remote sensing estimation models of Suaeda salsa biomass in the coastal wetland. Shengtai Xuebao/Acta Ecol. Sinica 2012, 32, 5355–5362. [Google Scholar]
- Song, Z.; Sun, Y.; Chen, P.; Jia, M. Assessing the ecosystem health of coastal wetland vegetation (Suaeda salsa) using the pressure state response model, a case of the Liao River estuary in China. Int. J. Environ. Res. Public Health 2022, 19, 546. [Google Scholar] [CrossRef] [PubMed]
- Lü, J.; Jiang, W.; Wang, W.; Chen, K.; Deng, Y.; Chen, Z.; Li, Z. Wetland landscape pattern change and its driving forces in Beijing-Tianjin-Hebei region in recent 30 years. Acta Ecol. Sinica 2018, 38, 4492–4503. [Google Scholar]
- Wu, T.; Zhao, D.; Kang, J.; Zhang, F.; Cheng, L. Suaeda salsa dynamic remote monitoring and biomass remote sensing inversion in Shuangtaizi River estuary. Ecol. Environ. 2011, 20, 24. [Google Scholar]
- Li, W.; Mu, M.; Chen, G.; Liu, W.; Liu, Y.; Liu, C. Research on Remote Sensing Inversion of Suaeda Salsa’s Biomass Based on TSAVI for OLI Band Simulation. Spectrosc. Spectr. Anal. 2016, 36, 1418–1422. [Google Scholar]
- Gao, T. Research on Community Information Extraction of Suaeda salsa Based on UAV Multispectral Data. Master’s Thesis, Dalian Ocean University, Dalian, China, June 2024. [Google Scholar]
- Li, W.; Wang, W.; Zhang, X. Carbon storage assessment of sea grass Suaeda salsa community in Liaohe Estuary wetland based on HY-1C CZI data. J. Dalian Ocean Univ. 2022, 37, 574–583. [Google Scholar]
- Han, M.; Pan, B.; Liu, Y.B.; Yu, H.Z.; Liu, Y.R. Wetland biomass inversion and space differentiation: A case study of the Yellow River Delta Nature Reserve. PLoS ONE 2019, 14, e0210774. [Google Scholar] [CrossRef]
- Dou, Z.; Li, Y.; Cui, L.; Pan, X.; Ma, Q.; Huang, Y.; Lei, Y.; Li, J.; Zhao, X.; Li, W. Hyperspectral inversion of Suaeda salsa biomass under different types of human activity in Liaohe Estuary wetland in north-eastern China. Mar. Freshw. Res. 2019, 71, 482–492. [Google Scholar] [CrossRef]
- Su, X.; Li, Y.; Jing, X.; Song, D.; Liu, G.; Xu, J.; Wang, X. Quantitative remote sensing inversion of Suaeda salsa growth density based on GF-6. Mar. Environ. Sci. 2023, 42, 151–159. [Google Scholar]
- Li, Y.; Chen, Y.; Chen, H.; Wang, C. Construction of Suaeda Salsa Vegetation Index Based on GF-1 WFV Images. Geomat. Inf. Sci. Wuhan Univ. 2019, 44, 1823–1831. [Google Scholar]
- Lin, Y.; Guo, J. Fuzzy Geospatial Object-Based Membership Function Downscaling. Remote Sens. 2023, 15, 1911. [Google Scholar] [CrossRef]
- CIE. Commission Internationale de l‘Eclairage Proceedings 1931; Cambridge Univ. Press: Cambridge, UK, 1932; pp. 19–29. [Google Scholar]
- Alföldi, T.T.; Munday, J.C., Jr. Water Quality Analysis by Digital Chromaticity Mapping of Landsat Data. Can. J. Remote Sens. 1978, 4, 108–126. [Google Scholar] [CrossRef]
- Bukata, R.P.; Bruton, J.E.; Jerome, J.H. Use of chromaticity in remote measurements of water quality. Remote Sens. Environ. 1983, 13, 161–177. [Google Scholar] [CrossRef]
- Bukata, R.P.; Pozdnyakov, D.V.; Jerome, J.H.; Tanis, F.J. Validation of a radiometric color model applicable to optically complex water bodies. Remote Sens. Environ. 2001, 77, 165–172. [Google Scholar] [CrossRef]
- Wang, S.; Li, J.; Zhang, B.; Spyrakos, E.; Tyler, A.N.; Shen, Q.; Zhang, F.; Kuster, T.; Lehmann, M.K.; Wu, Y. Trophic state assessment of global inland waters using a MODIS-derived Forel-Ule index. Remote Sens. Environ. 2018, 217, 444–460. [Google Scholar] [CrossRef]
- Li, M.; Sun, Y.; Li, X.; Cui, M.; Huang, C. An Improved Eutrophication Assessment Algorithm of Estuaries and Coastal Waters in Liaodong Bay. Remote Sens. 2021, 13, 3867. [Google Scholar] [CrossRef]
- Burket, M.O.; Olmanson, L.G.; Brezonik, P.L. Comparison of Two Water Color Algorithms: Implications for the Remote Sensing of Water Bodies with Moderate to High CDOM or Chlorophyll Levels. Sensors 2023, 23, 1071. [Google Scholar] [CrossRef]
- Wang, L.; Wang, X.; Meng, Q.; Chen, Y.; Wang, X.; Jiang, L.; Shang, Y. Retrieval and spatiotemporal variation of total suspended matter concentration using a MODIS-derived hue angle in the coastal waters of Qinhuangdao, China. Front. Mar. Sci. 2024, 11, 1434225. [Google Scholar] [CrossRef]
- Liu, R.; Xiao, Y.; Ma, Y.; Cui, T.; An, J. Red tide detection based on high spatial resolution broad band optical satellite data. ISPRS J. Photogramm. Remote Sens. 2022, 184, 131–147. [Google Scholar] [CrossRef]
- Dai, Y.; Yang, S.; Zhao, D.; Hu, C.; Xu, W.; Anderson, D.M.; Li, Y.; Song, X.-P.; Boyce, D.G.; Gibson, L. Coastal phytoplankton blooms expand and intensify in the 21st century. Nature 2023, 615, 280–284. [Google Scholar] [CrossRef]
- Zhao, D.; Luo, Q.; Qiu, Z. Chromaticity-Based Discrimination of Algal Bloom from Inland and Coastal Waters Using In Situ Hyperspectral Remote Sensing Reffectance. Water 2024, 16, 2276. [Google Scholar] [CrossRef]
- Shang, Y.; Jiang, L.; Wang, L.; Ye, Z.; Gao, S.; Tang, X. Methods for detecting green tide in the Yellow Sea using Google Earth Engine platform. Reg. Stud. Mar. Sci. 2024, 77, 103666. [Google Scholar] [CrossRef]
- Wang, L.; Meng, Q.; Wang, X.; Chen, Y.; Wang, X.; Han, J.; Wang, B. Identification of Floating Green Tide in High-Turbidity Water from Sentinel-2 MSI Images Employing NDVI and CIE Hue Angle Thresholds. J. Mar. Sci. Eng. 2024, 12, 1640. [Google Scholar] [CrossRef]
- He, S.; Zhang, S.; Tian, J.; Lu, X. UAV hyperspectral inversion of Suaeda Salsa leaf area index in coastal wetlands combined with multimodal data. Natl. Remote Sens. Bull. 2023, 27, 1441–1453. [Google Scholar] [CrossRef]
- Zhou, Z.; Yang, Y.; Chen, B. Estimating Spartina alterniflora fractional vegetation cover and aboveground biomass in a coastal wetland using SPOT6 satellite and UAV data. Aquat. Bot. 2018, 144, 38–45. [Google Scholar] [CrossRef]
- Bazzo, C.O.G.; Kamali, B.; Hütt, C.; Bareth, G.; Gaiser, T. A review of estimation methods for aboveground biomass in grasslands using UAV. Remote Sens. 2023, 15, 639. [Google Scholar] [CrossRef]
- Marcial-Pablo, M.d.J.; Gonzalez-Sanchez, A.; Jimenez-Jimenez, S.I.; Ontiveros-Capurata, R.E.; Ojeda-Bustamante, W. Estimation of vegetation fraction using RGB and multispectral images from UAV. Int. J. Remote Sens. 2019, 40, 420–438. [Google Scholar] [CrossRef]
- Adão, T.; Hruška, J.; Pádua, L.; Bessa, J.; Peres, E.; Morais, R.; Sousa, J.J. Hyperspectral imaging: A review on UAV-based sensors, data processing and applications for agriculture and forestry. Remote Sens. 2017, 9, 1110. [Google Scholar] [CrossRef]
- Wang, S.; Li, J.; Shen, Q.; Zhang, B.; Zhang, F.; Lu, Z. MODIS-based radiometric color extraction and classification of inland water with the Forel-Ule scale: A case study of Lake Taihu. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 8, 907–918. [Google Scholar] [CrossRef]
- Yang, C.; Fritz, B.K.; Suh, C.P.C. Practical methods for aerial image acquisition and reflectance conversion using consumer-grade cameras on manned and unmanned aircraft. Precis. Agric. 2024, 25, 2831–2852. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Type | Model Expression | R2 | MAPE (%) | RMSE (kg/m2) |
|---|---|---|---|---|
| Linear function | Biomass = −8.87436 + 0.03512 × α | 0.93650 | 12.985 | 0.09966 |
| Quadratic polynomial function | Biomass = 136.68861 − 1.07788 × α + 0.00213 × α2 | 0.99124 | 91.346 | 0.55293 |
| Exponential function | Biomass = 3.57639 × 10−15 × e0.12201×α | 0.99696 | 3.616 | 0.02183 |
| Power function | Biomass = 4.51642 × 10−79 × α32.16447 | 0.99674 | 3.554 | 0.02258 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Wang, X.; Su, X.; Wen, S.; Wang, X.; Meng, Q.; Jiang, L. High-Resolution Mapping and Biomass Estimation of Suaeda salsa in Coastal Wetlands Using UAV Visible-Light Imagery and Hue Angle Inversion. Appl. Sci. 2025, 15, 7423. https://doi.org/10.3390/app15137423
Wang L, Wang X, Su X, Wen S, Wang X, Meng Q, Jiang L. High-Resolution Mapping and Biomass Estimation of Suaeda salsa in Coastal Wetlands Using UAV Visible-Light Imagery and Hue Angle Inversion. Applied Sciences. 2025; 15(13):7423. https://doi.org/10.3390/app15137423
Chicago/Turabian StyleWang, Lin, Xiang Wang, Xiu Su, Shiyong Wen, Xinxin Wang, Qinghui Meng, and Lingling Jiang. 2025. "High-Resolution Mapping and Biomass Estimation of Suaeda salsa in Coastal Wetlands Using UAV Visible-Light Imagery and Hue Angle Inversion" Applied Sciences 15, no. 13: 7423. https://doi.org/10.3390/app15137423
APA StyleWang, L., Wang, X., Su, X., Wen, S., Wang, X., Meng, Q., & Jiang, L. (2025). High-Resolution Mapping and Biomass Estimation of Suaeda salsa in Coastal Wetlands Using UAV Visible-Light Imagery and Hue Angle Inversion. Applied Sciences, 15(13), 7423. https://doi.org/10.3390/app15137423