

Robust Model-Free Control for MMC Inverters in Cold Ironing Systems

 , ,
, ,  ,
,  and
and
Abstract
1. Introduction
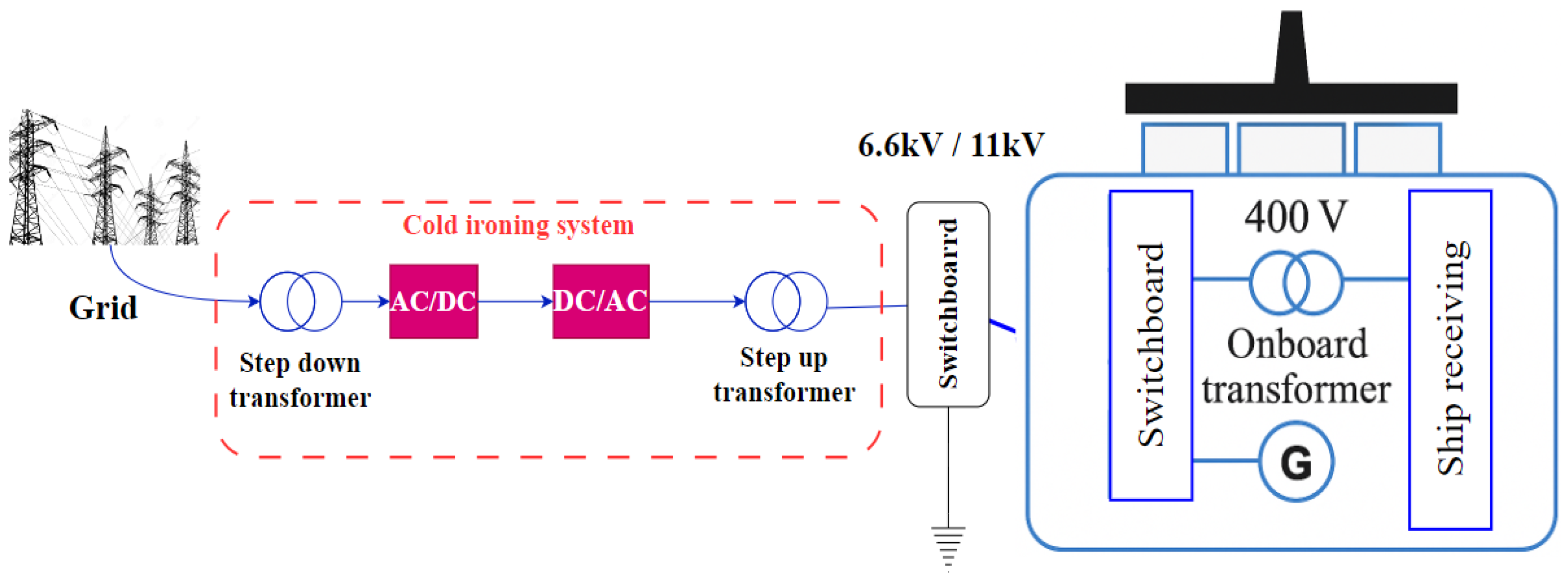
1.1. Centralized Distribution
1.2. Decentralized Distribution
1.3. DC Distribution
- Application of a robust model-free control approach for the MMC converter in shore power electrification systems.
- Comparison with classical controllers to highlight the benefits of model-free control in terms of performance and robustness.
- Validation through simulations in Simulink, demonstrating improvements in THD, dynamic response, and stability.
2. Description and Modeling of the MMC Converter
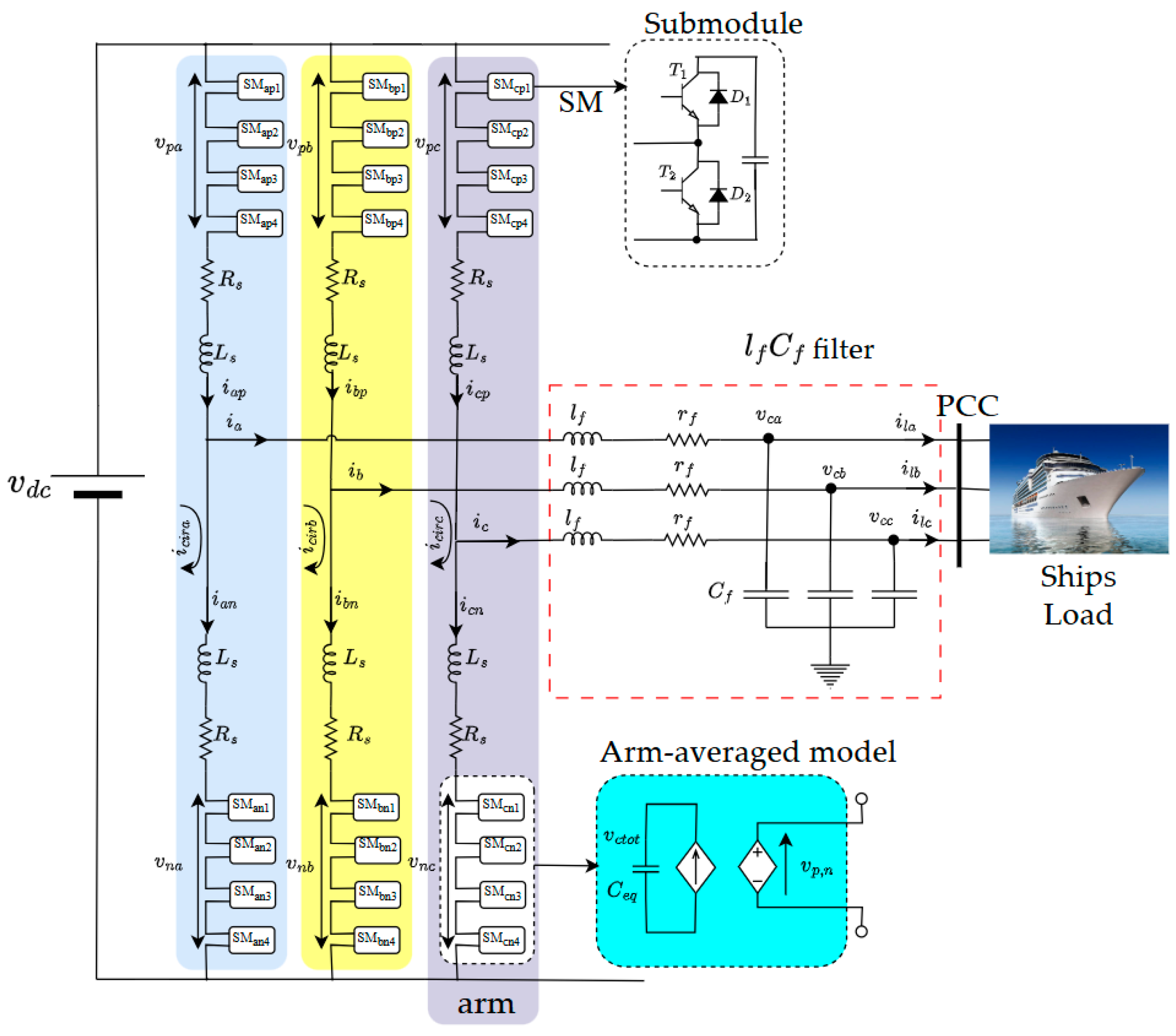
2.1. Description of the MMC Converter
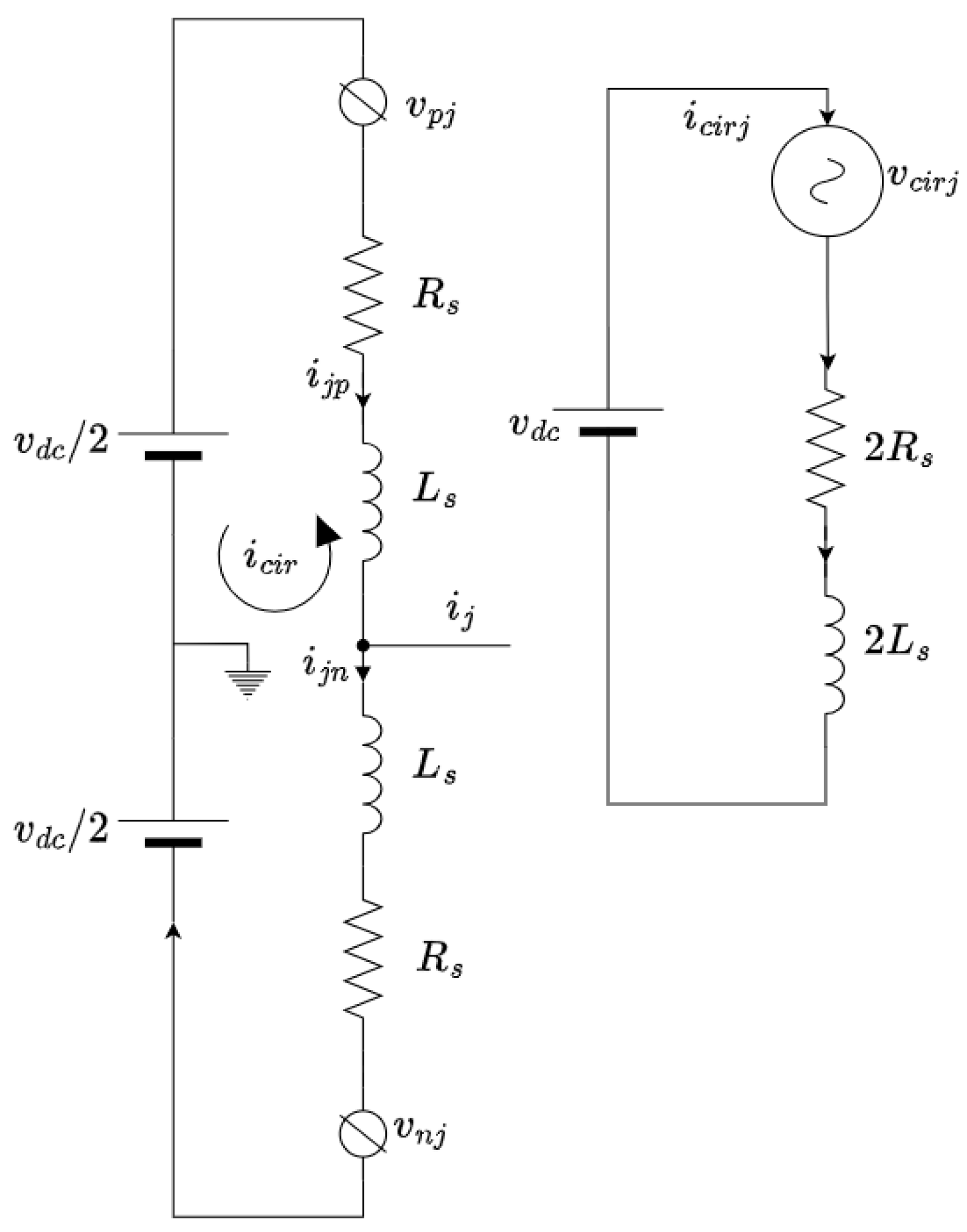
2.2. Modeling of the MMC Converter
3. Proposed Control Strategy
3.1. Application to the Studied System
- Outer loop: this loop uses an iPIa to regulate the output voltage and provides the internal current references and uses an iPIa controller.
- Inner loop: this loop uses a simple Proportional gain controller to generate the converter input control signal.
3.2. Modulation Technique
3.3. Stability Analysis
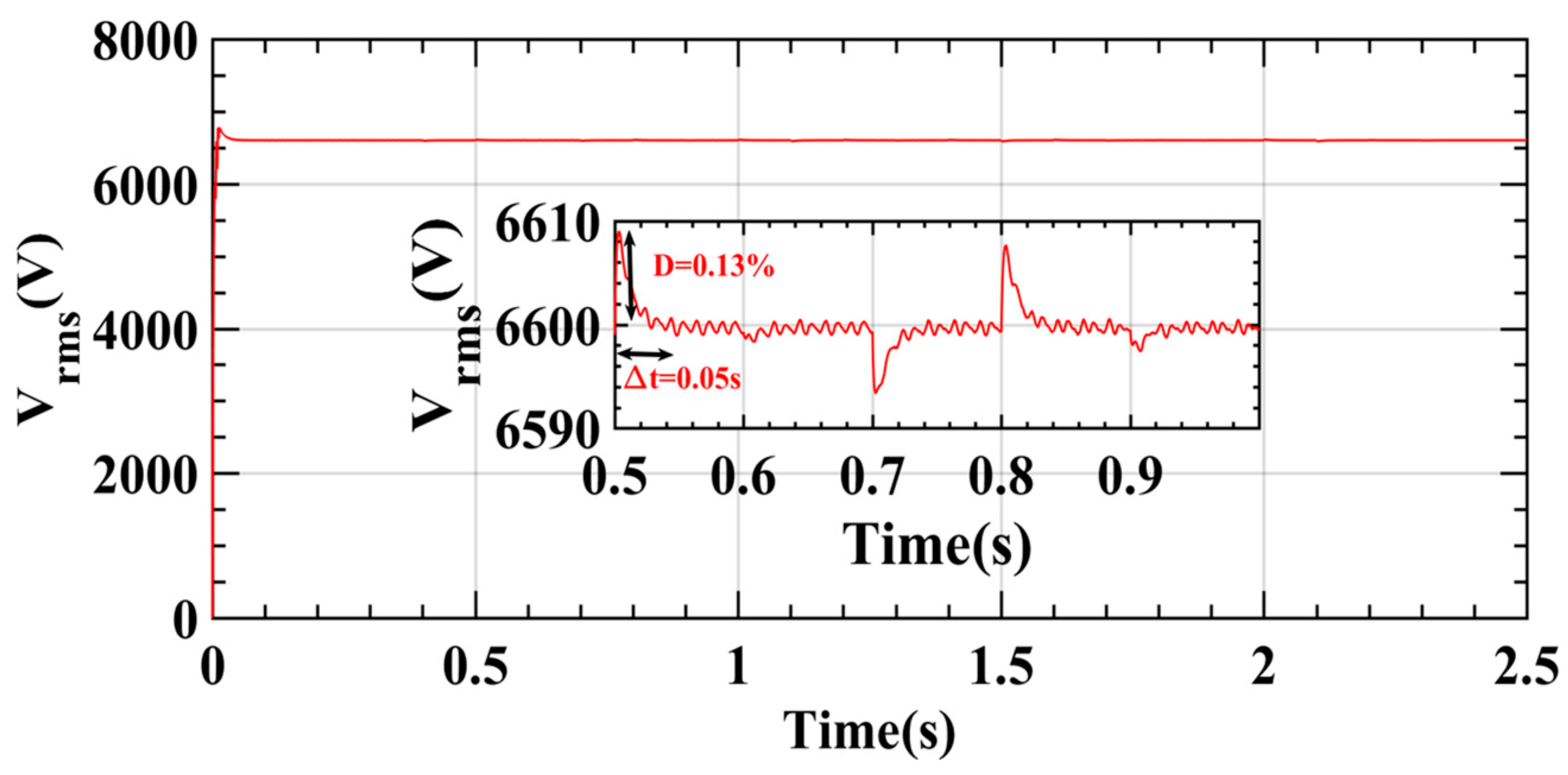
4. Simulation Results
4.1. Test of Ship Load Profile
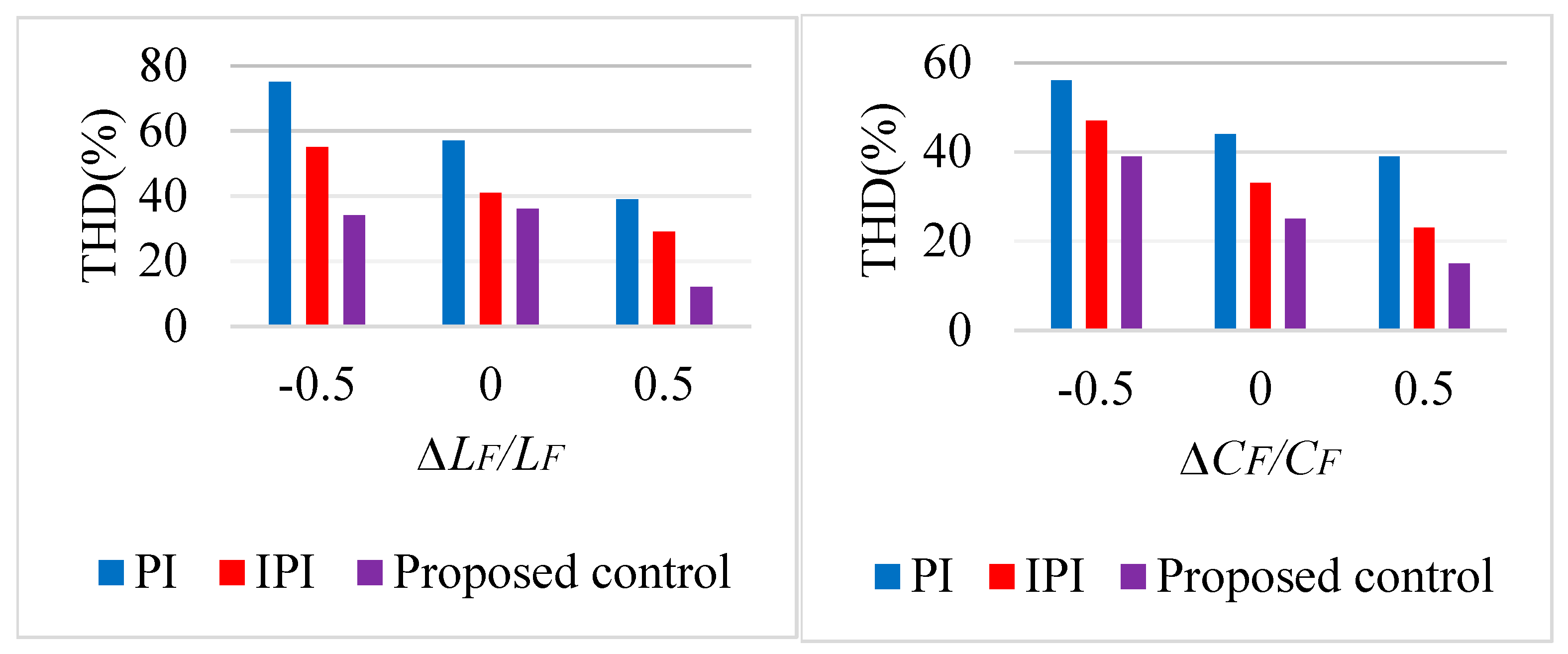
4.2. Robustness Analysis
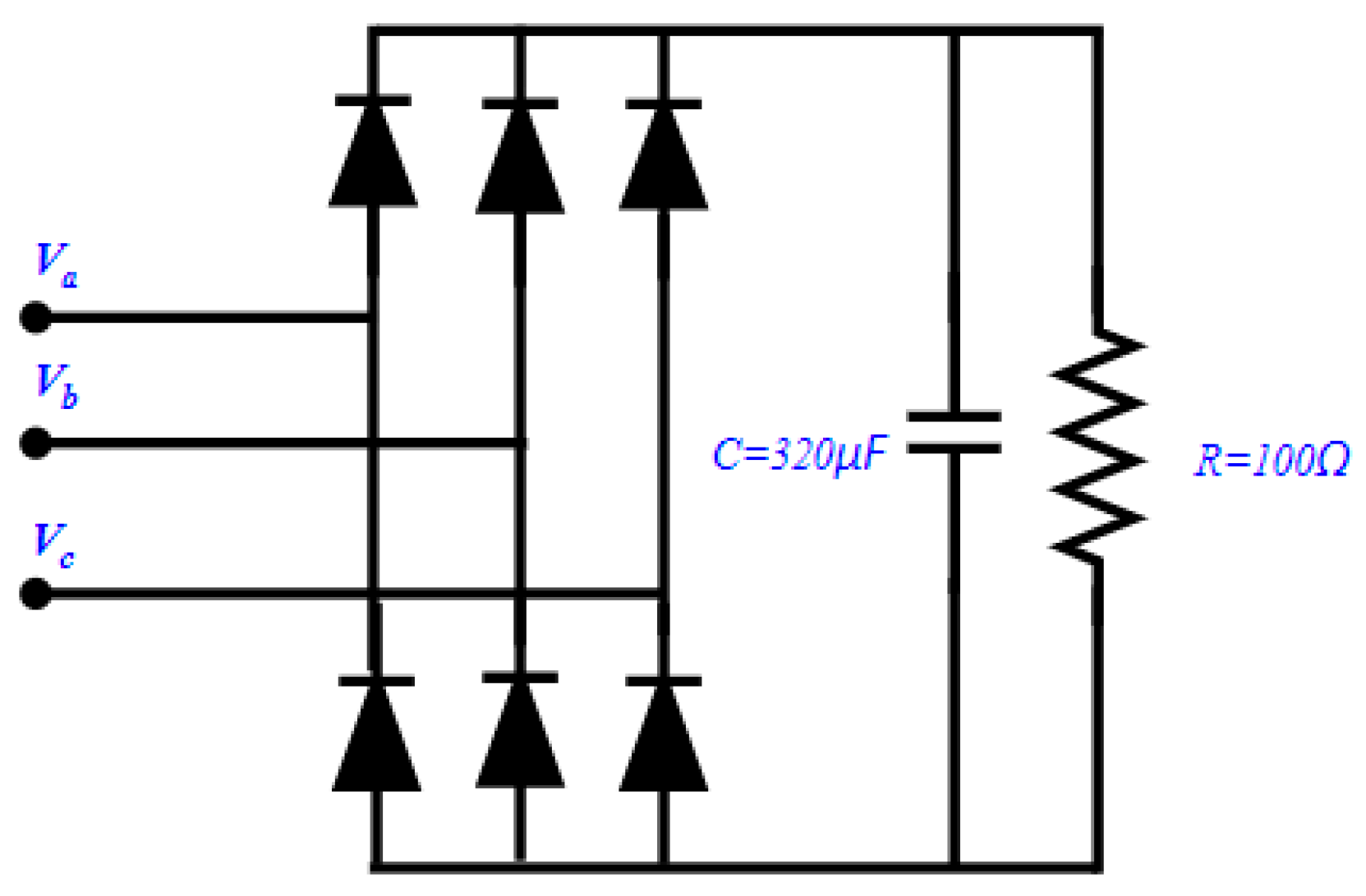
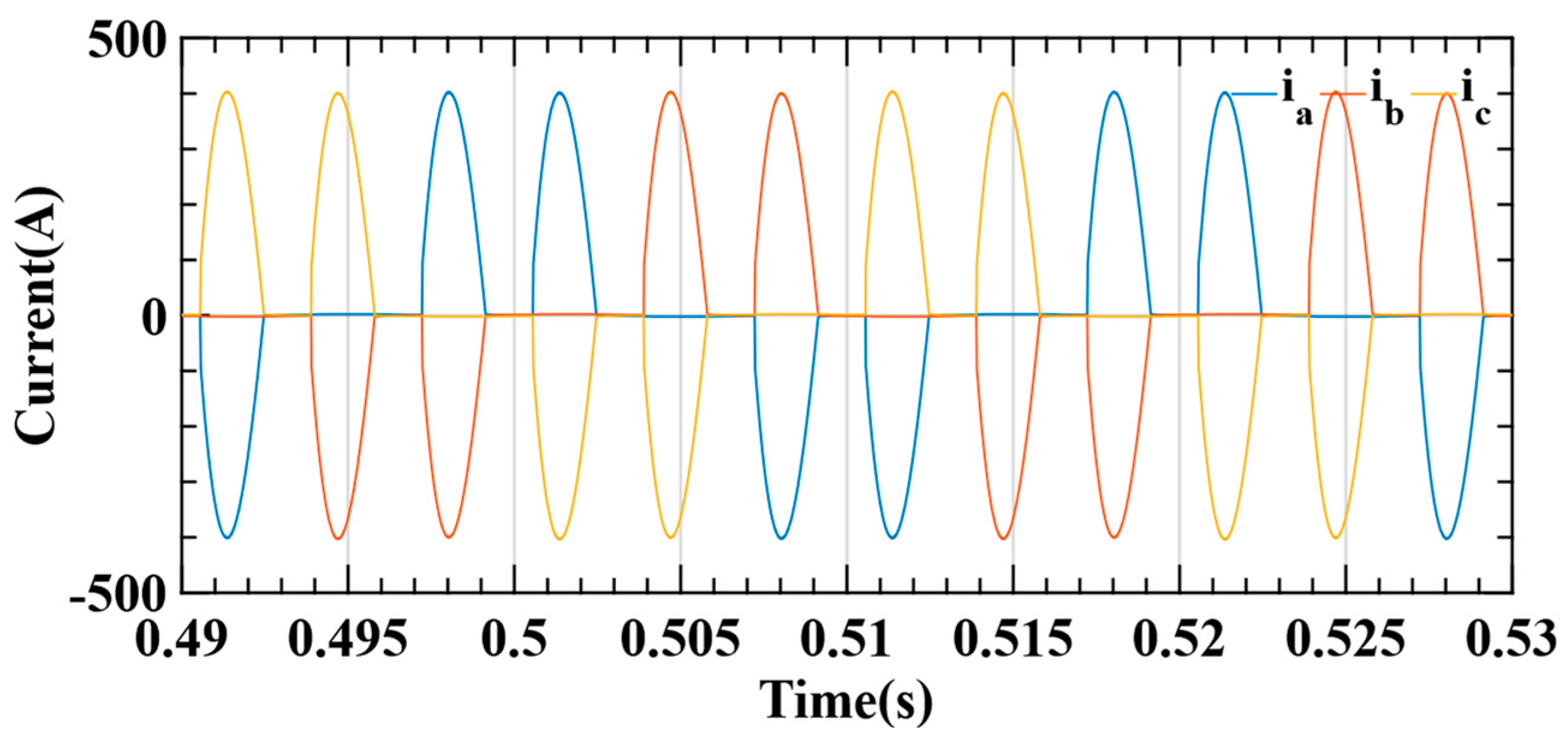
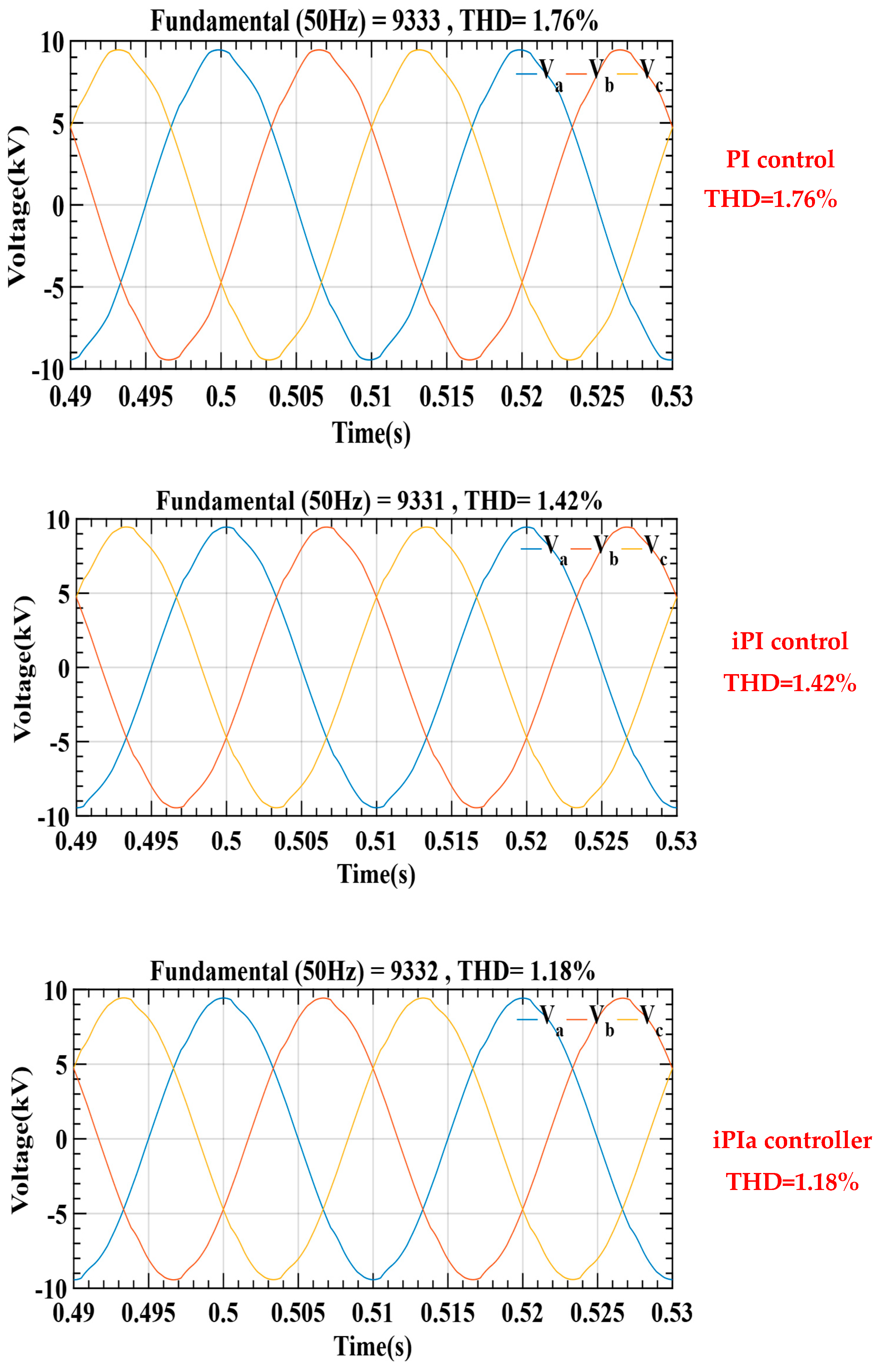
4.3. Nonlinear Loading Conditions
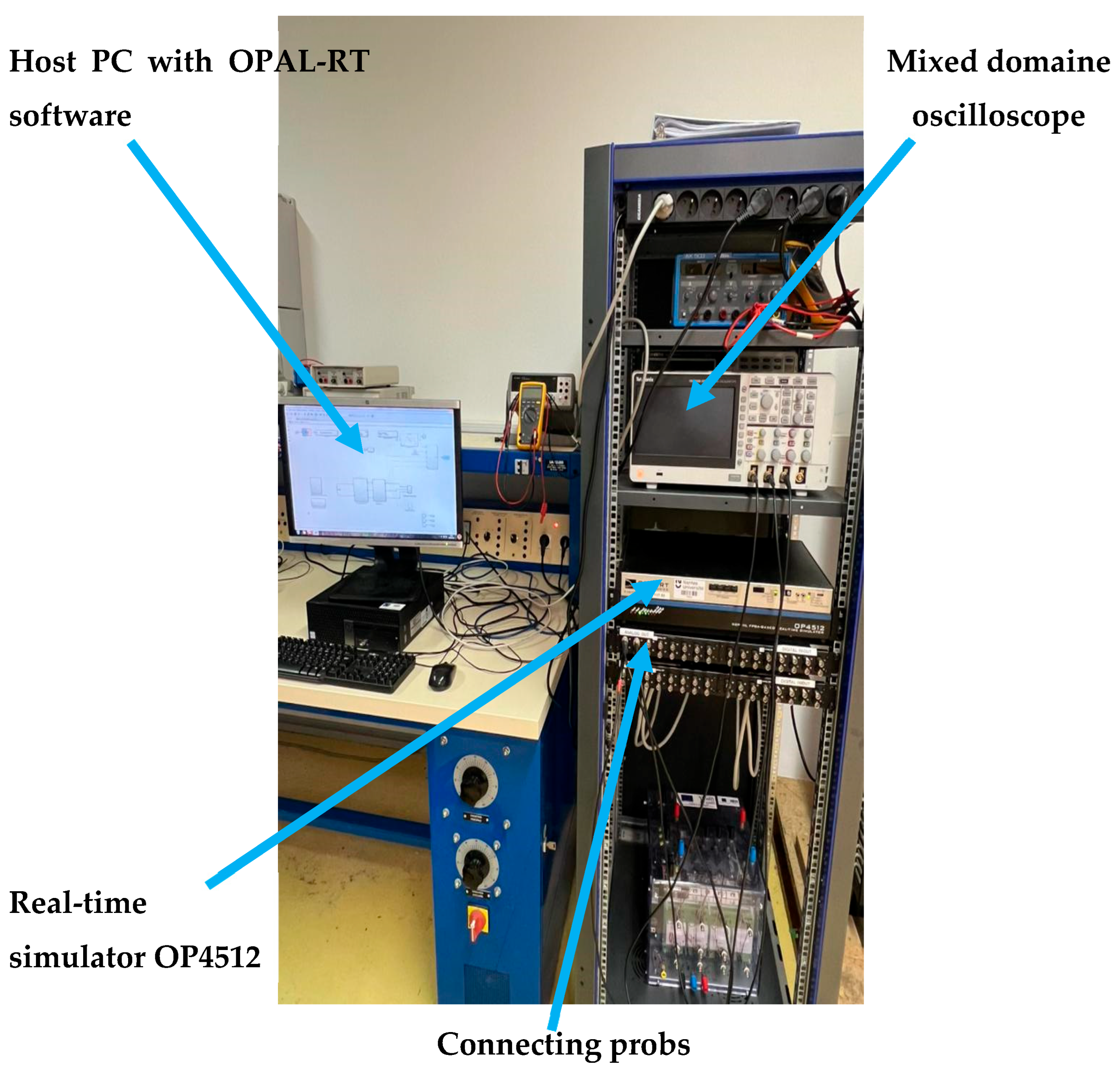
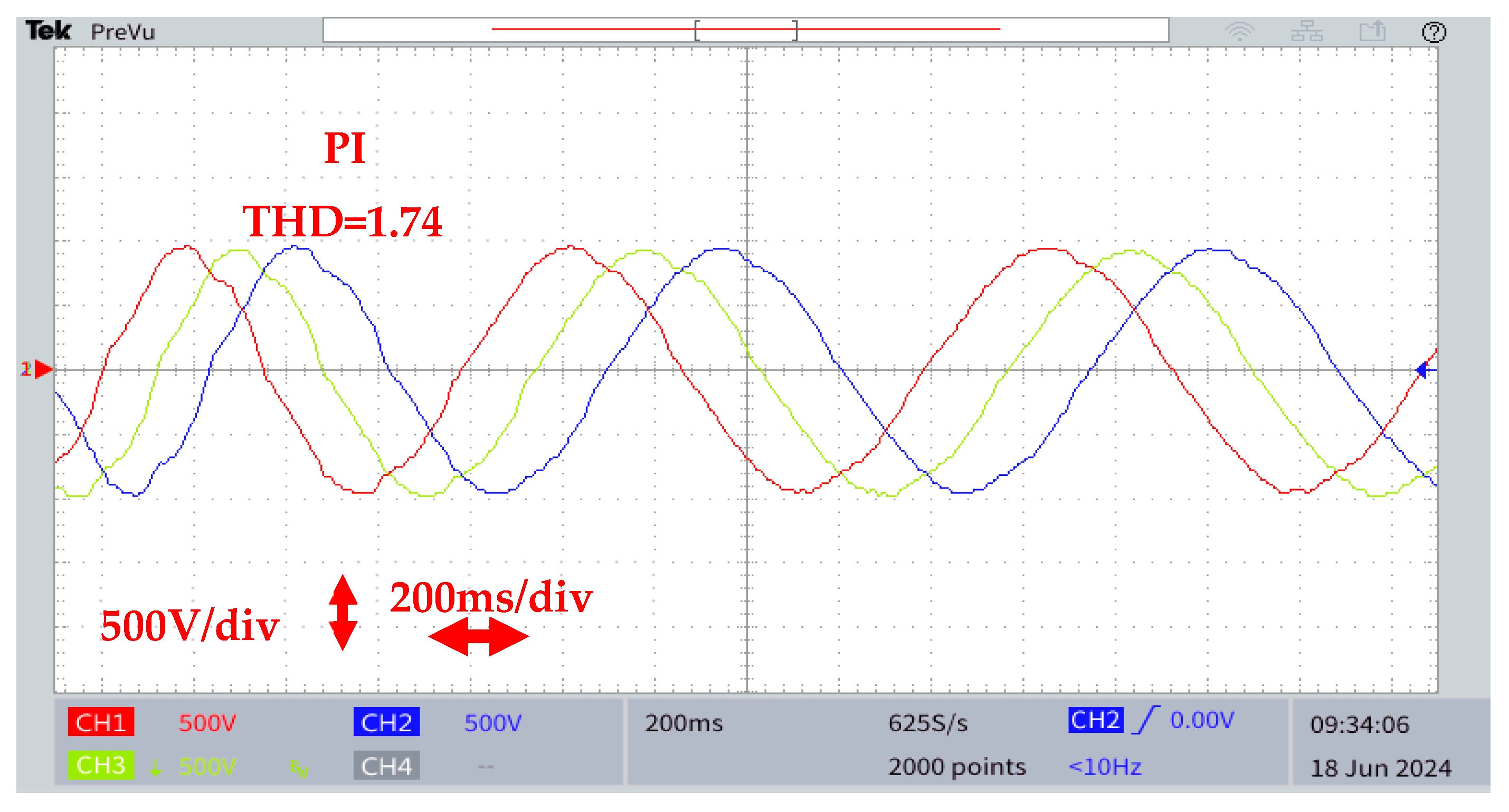
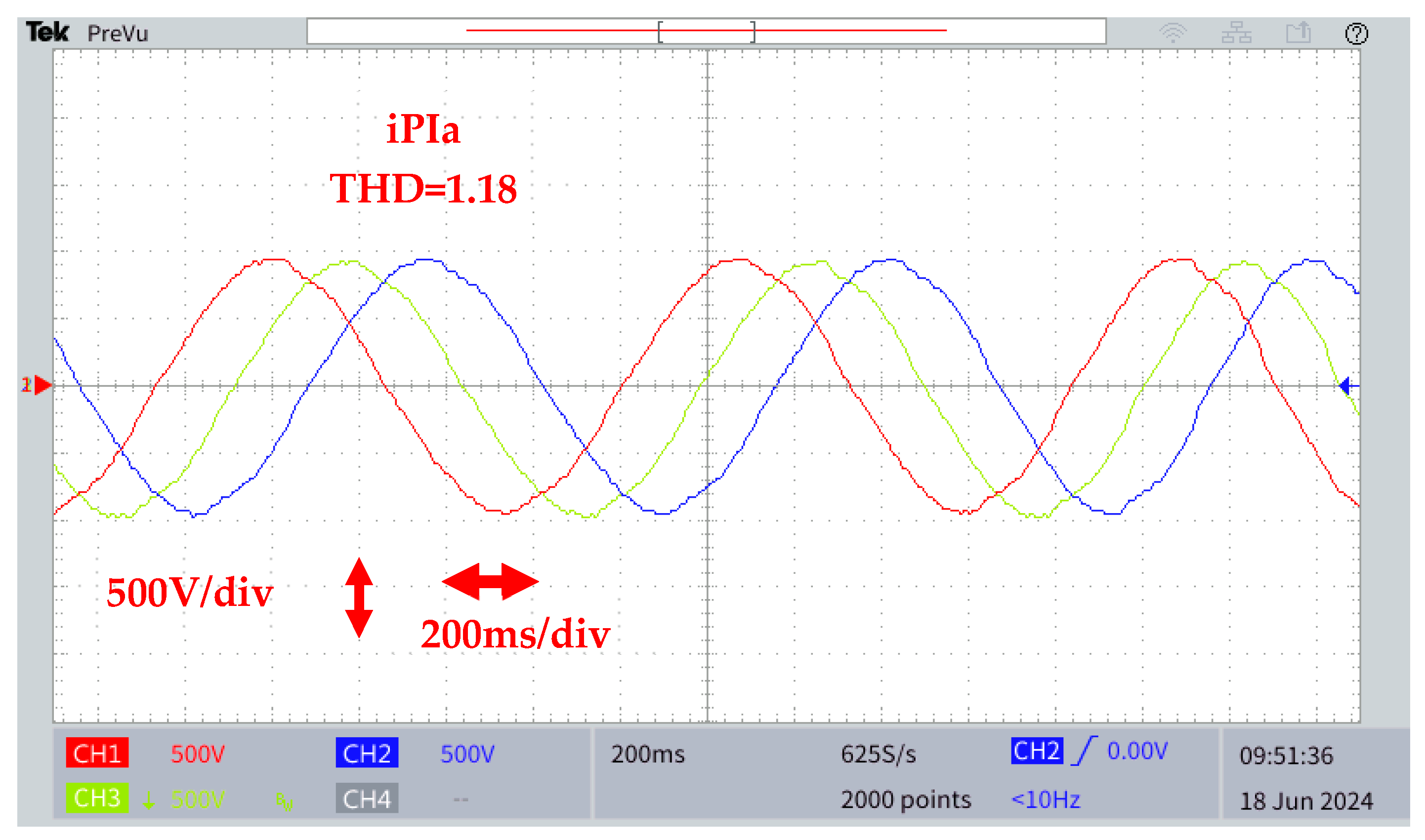
4.4. OPAL-RT Validation Result
5. Conclusions
- Regulating the voltage at the PCC during a variable load.
- Reducing voltage harmonics for a nonlinear load with THD equal to 1.18%.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| MMC | Modular Multilevel Converter |
| THD | Total Harmonic Distortion |
| CI | Cold Ironing |
| MFC | Model-Free Control |
| GHG | GreenHouse Gases |
| TEUs | Twenty-Foot Equivalent Units |
| DG | Decentralized Generation |
| SM | SubModule |
| iPI | intelligent Proportional-Integral |
| SISO | Single Input Single Output |
| MIMO | Multi-Input Multi-Output |
| HIL | Hardware-In-the-Loop |
| PI | Proportional–Integral |
| iPIa | Intelligent proportional–integral adaptive |
References
- International Maritime Organization. Site officiel de l’IMO. 2025. Available online: http://www.imo.org/ (accessed on 29 May 2025).
- Vancouver Fraser Port Authority. Homepage FR|Vancouver Fraser Port Authority. 2025. Available online: https://www.portvancouver.com/fr (accessed on 29 May 2025).
- Smith, R. Directive 2006/54/EC of the European Parliament and of the Council of 5 July 2006. In Core EU Legislation; Macmillan Education UK: London, UK, 2015; pp. 333–345. [Google Scholar] [CrossRef]
- Etcher, K. An Introduction to Shore Power. GVHA. 2025. Available online: https://gvha.ca/about-gvha/blog/an-introduction-to-shore-power/ (accessed on 29 May 2025).
- Rapport technique, Innovation Maritime. L’électrification des quais au Québec; Réseau MeRLIN et Technopole maritime du Québec: Rimouski, QC, Canada, 2022; Available online: https://www.innovationmaritime.ca/ (accessed on 29 May 2025).
- IEC/ISO/IEEE 80005-2012; ICS code: 47.020.60, IEC/ISO/IEEE Utility Connections in Port—Part 1: High Voltage Shore Connection (HVSC) Systems. IEEE: Piscataway, NJ, USA, 2012. [CrossRef]
- He, J.; Li, X.; Xu, H.; Zhu, J.; Dai, P.; Chu, H. Review and Discussion on Standards for Shore-to-Ship Power Supply System. In Proceedings of the 4th Annual International Conference on Material Engineering and Application (ICMEA 2017), Wuhan, China, 15–17 December 2017; Volume 146. [Google Scholar]
- Baizura Binti Ahamad, N.; Guerrero, J.M.; Su, C.-L.; Vasquez, J.C.V.; Zhaoxia, X. Microgrids Technologies in Future Seaports. In Proceedings of the 2018 IEEE International Conference on Environment and Electrical Engineering and 2018 IEEE Industrial and Commercial Power Systems Europe, EEEIC/I and CPS Europe 2018, Palermo, Italy, 12–15 June 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Sciberras, E.A.; Zahawi, B.; Atkinson, D.J.; Juandó, A.; Sarasquete, A. Cold ironing and onshore generation for airborne emission reductions in ports. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2016, 230, 67–82. [Google Scholar] [CrossRef]
- Sciberras, E.A. Shipboard Electrification: Emission Reduction and Energy Control. Ph.D. Thesis, Newcastle University, Newcastle upon Tyne, UK, 2016. Available online: https://theses.ncl.ac.uk/jspui/handle/10443/3229 (accessed on 29 May 2025).
- Bernacchi, R. Shore-to-ship power: Opportunities and challenges. In MEDports Forum 2019. 2019. Available online: https://medports.org/wp-content/uploads/2019/10/Roberto-BERNACCHI-Shore-to-Ship-Power-ABB-MEDports-FORUM-2019.pdf (accessed on 29 May 2025).
- IEC/ISO/IEEE 80005-2014; ICS Code: 47.020.60, Utility Connections in Port—Part 3: Low Voltage Shore Connection (LVSC) Systems. IEEE: Piscataway, NJ, USA, 2014. Available online: https://cdn.standards.iteh.ai/samples/21961/a99297bdae7a4d82b8f355889d528989/IEC-PAS-80005-3-2014.pdf (accessed on 29 May 2025).
- Ryan, M.; De Doncker, R.; Lorenz, R. Decoupled control of a 4-leg inverter via a new 4×4 transformation matrix. In Proceedings of the 30th Annual IEEE Power Electronics Specialists Conference, Record, (Cat. No.99CH36321), Charleston, SC, USA, 1 July 1999; pp. 187–192. [Google Scholar] [CrossRef]
- Vechiu, I.; Curea, O.; Camblong, H. Transient Operation of a Four-Leg Inverter for Autonomous Applications With Unbalanced Load. IEEE Trans. Power Electron. 2010, 25, 399–407. [Google Scholar] [CrossRef]
- Zhou, X.; Tang, F.; Loh, P.C.; Jin, X.; Cao, W. Four-Leg Converters With Improved Common Current Sharing and Selective Voltage-Quality Enhancement for Islanded Microgrids. IEEE Trans. Power Deliv. 2016, 31, 522–531. [Google Scholar] [CrossRef]
- Mehrasa, M. Control of Modular Multilevel Converters in High Voltage Direct Current Power Systems. Ph.D. Thesis, University of Beira Interior, Covilhã, Portugal, 2019. Available online: https://scispace.com/pdf/control-of-modular-multilevel-converters-in-high-voltage-4t9494qzsv.pdf (accessed on 29 May 2025).
- Shahparasti, M.; Mohamadian, M.; Yazdian, A.; Ahmad, A.A.; Amini, M. Derivation of a Stationary-Frame Single-Loop Controller for Three-Phase Standalone Inverter Supplying Nonlinear Loads. IEEE Trans. Power Electron. 2014, 29, 5063–5071. [Google Scholar] [CrossRef]
- Loh, P.C.; Newman, M.; Zmood, D.; Holmes, D. A comparative analysis of multiloop voltage regulation strategies for single and three-phase UPS systems. IEEE Trans. Power Electron. 2003, 18, 1176–1185. [Google Scholar] [CrossRef]
- Wai, R.; Lin, C.; Wu, W.; Huang, H. Design of backstepping control for high-performance inverter with stand-alone and grid-connected power-supply modes. IET Power Electron. 2013, 6, 752–762. [Google Scholar] [CrossRef]
- Bayhan, S.; Trabelsi, M.; Abu-Rub, H.; Malinowski, M. Finite-Control-Set Model-Predictive Control for a Quasi-Z-Source Four-Leg Inverter Under Unbalanced Load Condition. IEEE Trans. Ind. Electron. 2017, 64, 2560–2569. [Google Scholar] [CrossRef]
- Gałecki, A. Particle swarm optimization of the multioscillatory LQR for a three-phase grid-tie converter. Przeglad Elektrotech. 2018, 94, 43–48. [Google Scholar] [CrossRef]
- Mohagheghi, S.; Del Valle, Y.; Venayagamoorthy, G.K.; Harley, R.G. A Proportional-Integrator Type Adaptive Critic Design-Based Neurocontroller for a Static Compensator in a Multimachine Power System. IEEE Trans. Ind. Electron. 2007, 54, 86–96. [Google Scholar] [CrossRef]
- Heredero-Peris, D.; Chillón-Antón, C.; Sánchez-Sánchez, E.; Montesinos-Miracle, D. Fractional proportional-resonant current controllers for voltage source converters. Electr. Power Syst. Res. 2019, 168, 20–45. [Google Scholar] [CrossRef]
- Zhao, L.; Li, Z.; Li, H.; Liu, B. Backstepping integral sliding mode control for pneumatic manipulators via adaptive extended state observers. ISA Trans. 2024, 144, 374–384. [Google Scholar] [CrossRef] [PubMed]
- Gong, X.; Fu, W.; Bian, X.; Fei, J. Adaptive Backstepping Terminal Sliding Mode Control of Nonlinear System Using Fuzzy Neural Structure. Mathematics 2023, 11, 1094. [Google Scholar] [CrossRef]
- Liu, X.; Qiu, L.; Rodriguez, J.; Wu, W.; Ma, J.; Peng, Z.; Wang, D.; Fang, Y. Neural Predictor-Based Dynamic Surface Predictive Control for Power Converters. IEEE Trans. Ind. Electron. 2022, 70, 1057–1065. [Google Scholar] [CrossRef]
- Zandi, O.; Poshtan, J. Voltage control of DC–DC converters through direct control of power switches using reinforcement learning. Eng. Appl. Artif. Intell. 2023, 120, 105833. [Google Scholar] [CrossRef]
- Zheng, L.; Jiang, F.; Song, J.; Gao, Y.; Tian, M. A Discrete-Time Repetitive Sliding Mode Control for Voltage Source Inverters. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1553–1566. [Google Scholar] [CrossRef]
- Kumar, N.; Saha, T.K.; Dey, J. Sliding-Mode Control of PWM Dual Inverter-Based Grid-Connected PV System: Modeling and Performance Analysis. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 435–444. [Google Scholar] [CrossRef]
- Zangeneh Bighash, E.; Sadeghzadeh, S.M.; Ebrahimzadeh, E.; Blaabjerg, F. Adaptive-Harmonic Compensation in Residential Distribution Grid by Roof-Top PV Systems. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 2098–2108. [Google Scholar] [CrossRef]
- Uddin, W.; Zeb, K.; Adil Khan, M.; Ishfaq, M.; Khan, I.; Islam, S.U.; Kim, H.-J.; Park, G.S.; Lee, C. Control of Output and Circulating Current of Modular Multilevel Converter Using a Sliding Mode Approach. Energies 2019, 12, 4084. [Google Scholar] [CrossRef]
- Jin, Y.; Cong, H.; Yang, Y.; Ji, A.; Fan, M.; Li, X.; Rodriguez, J. Finite-Control-Set Predictive Sliding Mode Control for LC-filtered Single-Phase Inverters. In Proceedings of the 2024 IEEE 10th International Power Electronics and Motion Control Conference (IPEMC 2024-ECCE Asia), Chengdu, China, 17–20 May 2024; pp. 1–7. [Google Scholar]
- Jouybary, H.S.; Khaburi, D.A.; El Hajjaji, A.; Mabwe, A.M. Optimal Sliding Mode Control of Modular Multilevel Converters Considering Control Input Constraints. Energies 2025, 18, 2757. [Google Scholar] [CrossRef]
- Gao, X.; Tian, W.; Pang, Y.; Kennel, R. Model-Predictive Control for Modular Multilevel Converters Operating at Wide Frequency Range With a Novel Cost Function. IEEE Trans. Ind. Electron. 2022, 69, 5569–5580. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, J.; Li, Z.; Sun, Y.; He, H. Adaptive Fast-Optimization Predictive Control of MMC With Improved Hybrid Control Framework. IEEE Trans. Ind. Electron. 2024, 71, 12338–12347. [Google Scholar] [CrossRef]
- Gutierrez, B.; Kwak, S.-S. Modular Multilevel Converters (MMCs) Controlled by Model Predictive Control With Reduced Calculation Burden. IEEE Trans. Power Electron. 2018, 33, 9630–9641. [Google Scholar] [CrossRef]
- Abdullahi, S.; Jin, T. Centralized controller design for voltage estimation error constrained in islanded DC-microgrids: Kalman Filtering Method. Simul. Model. Pract. Theory 2023, 125, 102753. [Google Scholar] [CrossRef]
- Guo, Z.; Li, K.-J.; Liu, Z.; Wang, J.; Li, L. A Novel Multistage Model Predictive Control with Reduced Calculation Burden for Modular Multilevel Converters in High Voltage Direct Current System. In Proceedings of the 2021 IEEE International Conference on Predictive Control of Electrical Drives and Power Electronics (PRECEDE), Jinan, China, 20–22 November 2021; pp. 759–764. [Google Scholar]
- Goff, G.L.; Fadel, M.; Bodson, M. Modélisation Analytique Modulaire du Convertisseur Modulaire Multiniveaux (MMC). In Proceedings of the Symposium de Genie Electrique (SGE 2021), Nantes, France, 6–8 July 2021. [Google Scholar]
- Najmi, V.; Nazir, M.N.; Burgos, R. A new modeling approach for Modular Multilevel Converter (MMC) in D-Q frame. In Proceedings of the 2015 IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015; pp. 2710–2717. [Google Scholar] [CrossRef]
- Doublet, M. Commande tolérante aux défauts et diagnostic des systèmes à retard inconnu par une approche sans modèle. Ph.D. Thesis, Université de Lorraine, Nancy, France, 2018. Available online: https://theses.hal.science/tel-01977205 (accessed on 29 May 2025).
- Fliess, M.; Join, C. Commande sans modèle et commande à modèle restreint. E-STA Sci. Technol. L’Automatique 2008, 5, 1–23. [Google Scholar]
- Fliess, M.; Join, C. Model-free control. Int. J. Control 2013, 86, 2228–2252. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | Values |
|---|---|
| Number of submodules per arm (N) | 4 |
| Capacity of an SM (Csm) | 31 mF |
| Arm inductance (Ls) | 10 mH |
| Arm resistance (Rs) | 0.1 Ω |
| Frequency | 50 Hz |
| DC bus voltage(vdc) | 25 kV |
| MMC voltage vrms | 6.6 kV |
| Load resistance | 100 Ω |
| The voltage of each submodule | 6250 V |
| Output power | 1.3 MW |
| Filter inductance (lf) | 1 mH |
| Filter resistance (rf) | 0.1 Ω |
| Filter capacitor (Cf) | 100 µF |
| {kpv, kiv}: (PI controller parameters for voltage outer loop) | {1, 100} |
| kpc (P controller parameters for current inner loop) | 150 |
| {kpicir, kiicir}: (PI controller parameters for circulating current loop) | {1.5, 5.5} |
| α0 | 4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abdel Kader, C.; Aït-Ahmed, N.; Houari, A.; Aït-Ahmed, M.; Yao, G.; El-Bah, M. Robust Model-Free Control for MMC Inverters in Cold Ironing Systems. Appl. Sci. 2025, 15, 7343. https://doi.org/10.3390/app15137343
Abdel Kader C, Aït-Ahmed N, Houari A, Aït-Ahmed M, Yao G, El-Bah M. Robust Model-Free Control for MMC Inverters in Cold Ironing Systems. Applied Sciences. 2025; 15(13):7343. https://doi.org/10.3390/app15137343
Chicago/Turabian StyleAbdel Kader, Cheikh, Nadia Aït-Ahmed, Azeddine Houari, Mourad Aït-Ahmed, Gang Yao, and Menny El-Bah. 2025. "Robust Model-Free Control for MMC Inverters in Cold Ironing Systems" Applied Sciences 15, no. 13: 7343. https://doi.org/10.3390/app15137343
APA StyleAbdel Kader, C., Aït-Ahmed, N., Houari, A., Aït-Ahmed, M., Yao, G., & El-Bah, M. (2025). Robust Model-Free Control for MMC Inverters in Cold Ironing Systems. Applied Sciences, 15(13), 7343. https://doi.org/10.3390/app15137343