Abstract
Distributed-drive electric vehicles (DDEVs), through independent, rapid, and precise control of the driving/braking torque of each wheel, offer unprecedented opportunities to enhance their handling stability, ride comfort, energy economy, and safety. However, their inherent over-actuation characteristics and multi-degree-of-freedom motion coupling pose significant challenges to the vehicle chassis control system. Chassis coordinated control, by coordinating multiple subsystems such as drive, braking, steering, and suspension, has become a key technology to fully leverage the advantages of distributed drive and address its challenges. This paper reviews the core issues in chassis coordinated control for DDEVs, comparatively analyzes several distributed electric drive coordinated control architectures, and systematically outlines recent research progress in lateral–longitudinal, lateral–vertical, longitudinal–vertical, and combined three-dimensional (lateral–longitudinal–vertical) coordinated control, including control architectures, key technologies, commonly used algorithms, and control allocation strategies. By analyzing and comparing the advantages, disadvantages, and application scenarios of different coordinated control schemes, this paper summarizes the key scientific problems and technical bottlenecks in this field and looks forward to development trends in intelligence, integration, and scenario-based fusion, aiming to provide a reference for the development of high-performance chassis control technology for DDEVs.
1. Introduction
At present, global industries are experiencing a deep systemic change, driven primarily by advancements in new energy and intelligentization, the effects of which are both extensive and profound [1,2,3,4,5,6]. In the automotive sector, electric vehicles, by virtue of their inherent advantages in environmental protection, energy structure optimization, operational efficiency, and the enhancement of driving/riding experience, have become a core strategic direction for global automotive technology development and industrial transformation [7,8,9]. With the continuous evolution of electric vehicle technology, the drive system, as one of its core subsystems, is undergoing a significant technological revolution from centralized to distributed configurations and from mechanical transmission to electronic control execution. Among these, distributed-drive architectures, represented by in-wheel motor or wheel-side motor drive technology, offer revolutionary potential and opportunities for the control of vehicle dynamics due to their unique characteristic of applying direct driving force to the wheels [10,11].
By arranging power units in close proximity to the drive wheels, either directly or indirectly, distributed-drive technology empowers each wheel with independent, swift, and accurate control over its driving or braking torque. Such enhanced control flexibility fundamentally changes the conventional architecture of internal combustion engine vehicles, characterized by a singular power source and intricate mechanical drivetrains, while also offering novel pathways to transcend the limitations in handling stability, ride smoothness, energy efficiency, and active safety inherent in traditional automobiles. For instance, the real-time optimal allocation of drive/brake torque to individual wheels enables a more effective management of traction, finer direct yaw moment control, and more adaptable vehicle attitude adjustments, leading to a notable expansion of the vehicle’s handling envelope and safety margins during limit conditions [12,13].
However, while distributed-drive systems endow vehicles with an excellent control potential, their inherent over-actuation characteristics and the strong coupling of multi-degree-of-freedom motions introduced by multiple actuators also pose unprecedented challenges to the design of vehicle chassis control systems. Specifically, the vehicle chassis system can typically be decoupled into three main motion control subsystems: longitudinal, lateral, and vertical. The longitudinal subsystem (involving drive and braking) is primarily responsible for regulating the vehicle’s acceleration and deceleration dynamic responses, directly affecting its acceleration performance, energy efficiency, and pitch dynamics [14,15]. The lateral subsystem mainly undertakes path tracking and heading maintenance tasks, crucial for the vehicle’s handling stability and transient response characteristics [16,17]. The vertical subsystem is dedicated to the control of body attitude and attenuation of vibrations, directly influencing ride comfort, ride smoothness, and tires’ road holding capability [18,19]. As the mutual coupling and constraints between the control objectives of various subsystems become increasingly significant, achieving effective coordination and unified control among different subsystems has become a critical technical challenge. Especially in complex control scenarios characterized by a high dynamics, multiple variables, and strong coupling, how to efficiently perform torque distribution among the drive wheels and achieve coordinated scheduling among executive systems like drive, braking, steering, and suspension has become a core scientific problem and technical bottleneck faced by current research in distributed-drive chassis systems [20]. If coordinated control strategies are improperly designed or absent, not only will it be impossible to fully unleash the inherent potential of the distributed-drive architecture, but it may also lead to conflicts between actuators and imbalances in kinematic/dynamic coupling, consequently causing a deterioration in the overall vehicle performance and a reduction in control robustness. For this reason, coordinated chassis control technology for DDEVs has emerged. This technology aims to achieve a synergistic improvement in overall vehicle dynamic performance, energy efficiency, and driving safety. It accomplishes this by systematically coordinating and optimizing control tasks across multiple degrees of freedom—longitudinal (drive/braking), lateral (steering), and vertical (suspension)—and their corresponding actuators, such as in-wheel motors, Active Front Steering (AFS), and Active/Semi-Active Suspension Systems (ASS/SAS). This technology is not only a key technological support for enhancing the intelligence level of electric vehicles but also lays a solid foundation for deep integration and collaborative operation with high-level autonomous driving systems [21].
Coordinated chassis control technology is crucial for the advancement of next-generation, high-performance DDEVs. In view of its significance, this paper aims to systematically collate and critique pivotal recent research in this domain.
Our review is structured as follows. First, we dissect and contrast the features and suitability of various coordinated control frameworks for DDEVs. Second, we detail recent breakthroughs in two-dimensional coordinated control, including lateral–longitudinal, lateral–vertical, and longitudinal–vertical motions. We then extend this analysis to comprehensive three-dimensional (lateral–longitudinal–vertical) integration. For each paradigm, we cover the primary control objectives, significant technological hurdles, prevalent algorithms, and essential torque/force distribution methods. By conducting a thorough examination of the merits, drawbacks, and potential applications of current coordinated control strategies, this review seeks to identify the critical unresolved scientific questions and technological bottlenecks in contemporary research and to project future developmental trajectories concerning intelligentization, integration, adaptability to diverse scenarios, and a profound synergy with advanced autonomous driving systems, thereby offering valuable references and inspiration for both academic scholars and engineering practitioners in this discipline.
2. Architectures for Coordinated Control of DDEV Chassis
In the implementation process of coordinated chassis control for DDEVs, the design and selection of the control architecture constitutes a core challenge. The control architecture plays a dual role. It not only defines the system’s internal mechanics—such as information flow paths, decision-making authority, and command transmission modes—but also directly dictates the system’s ultimate outcomes. These outcomes include the performance of coordinated control, the complexity of implementation, operational reliability, and future functional scalability. Currently, architectures applied to vehicle chassis’ integrated control can mainly be categorized into decentralized architectures, centralized architectures, and hierarchical architectures [22,23].
2.1. Decentralized Architecture
A decentralized control architecture can be regarded as a natural evolution of early automotive electronic control systems’ development, and it remains the most widely used architectural form in traditional fuel vehicles to this day, with its typical structure shown in Figure 1. In a decentralized control architecture, each major functional subsystem of the vehicle chassis, such as the drive/braking system [24,25,26,27], steering system [28,29,30,31], and suspension system [32,33,34,35], is equipped with an independent Electronic Control Unit (ECU). Each ECU is independently responsible for sensor information processing, control logic computation, and actuator drive control for its corresponding subsystem.
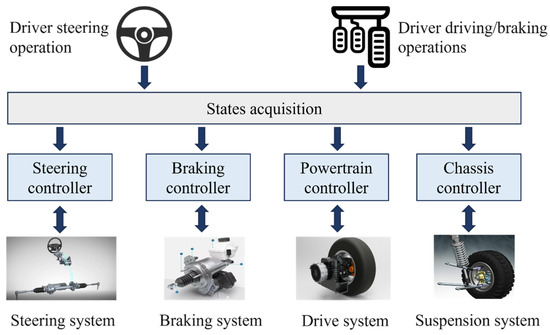
Figure 1.
Decentralized architecture.
The core characteristic of this architecture lies in its high degree of modularity and the independence among its subsystems. Each subsystem and its controller can be considered a relatively independent unit, typically developed and supplied by different vendors, while the vehicle manufacturer is primarily responsible for defining interface specifications and completing the system’s integration. This model can, to a certain extent, shorten development cycles and optimize economic benefits [36]. For conventional vehicles, the decentralized architecture can satisfy their basic functional requirements under most operating conditions. However, complex nonlinear coupling relationships exist among the vehicle’s longitudinal, lateral, and vertical dynamics [37,38]. The limitations of the decentralized architecture become particularly evident near or at the handling limits. Inherent issues—such as insufficient information sharing, a lack of a unified decision-making mechanism, and potential response delays—make it difficult to achieve effective decoupling and deep coordinated control of the vehicle’s three-dimensional dynamic behaviors.
2.2. Centralized Architecture
Corresponding to decentralized architecture, centralized control architecture represents another philosophy of system integration, with its core objective being to achieve optimal vehicle-level control through a global information fusion and a unified decision-making mechanism. Its typical structure is shown in Figure 2. In a centralized control architecture, sensory information from all the subsystems of the vehicle chassis is gathered into a single central controller. This central processing unit is solely responsible for global state assessments, control decision-making, and the generation of control commands, and it dispatches these commands to the various actuators. Under this architecture, information achieves a high degree of centralization and sharing, the control logic typically adopts a top-down design approach, and the central controller possesses the highest control authority over the entire chassis system.
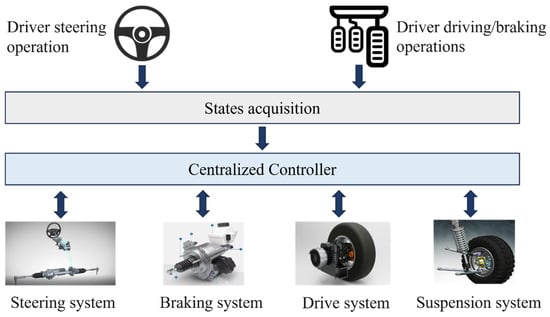
Figure 2.
Centralized architecture.
Although centralized control architectures exhibit a high degree of integration and theoretical optimal control potential, some studies indicate that they still face numerous constraints in practical engineering applications, making their widespread adoption difficult [39,40]. Specifically, due to the lack of relative independence among various parts of the control system, the development of overall vehicle control functions is highly dependent on deep collaboration and coordination among electronic control system suppliers. Furthermore, global integrated control places extremely high demands on the data processing capabilities of the central processor, leading to a huge computational load on the ECU. At the same time, this control architecture also has deficiencies in terms of flexibility for functional expansion and systems’ fault tolerance capabilities.
2.3. Hierarchical Architecture
To effectively overcome the insufficient coordination capability of decentralized architectures and the excessive implementation complexity and reliability risks of centralized architectures, the hierarchical control architecture emerged. This control architecture was first proposed by Fruechte et al. [41] and is widely considered one of the most promising technical approaches for achieving the coordinated control of complex systems, especially chassis coordinated control. The typical structure of a hierarchical architecture is shown in Figure 3. In this architecture, complex vehicle control tasks are decomposed and processed at different layers. A typical hierarchical structure usually includes three distinct levels: a Decision Layer, a Coordination Layer, and an Execution Layer. The Decision Layer is responsible for generating the desired overall vehicle motion control targets (e.g., the desired yaw rate, center of gravity sideslip angle) based on driver intent, real-time vehicle status, and external environmental information. The Coordination Layer calculates the generalized forces/moments (e.g., total driving/braking torque) required to achieve the vehicle control targets issued by the Decision Layer. Subsequently, it optimally distributes these calculated forces/moments to the individual physical actuators. This distribution is achieved through advanced control allocation algorithms and by comprehensively considering physical constraints such as the dynamic response characteristics and torque output limits of actuators (e.g., drive motors, brakes), as well as tire adhesion limits. The Execution Layer is responsible for receiving and accurately tracking the specific control commands allocated by the Coordination Layer. It rapidly and precisely drives the corresponding actuating mechanisms through the controllers of various subsystems (e.g., motor controllers, steering actuator controllers, suspension controllers).
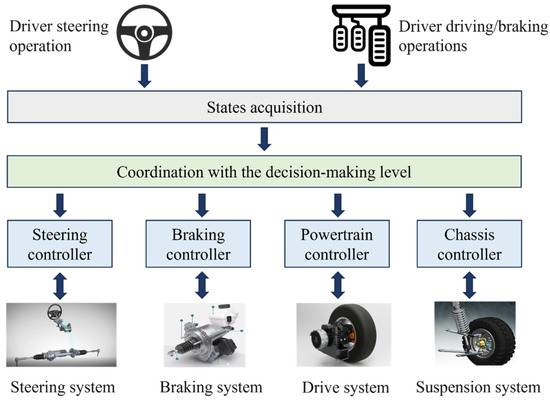
Figure 3.
Hierarchical architecture.
The hierarchical architecture provides a clear and efficient framework for achieving complex chassis coordinated control, and thus has attracted extensive research and exploration from numerous scholars. Against this backdrop, Guo et al. [42] proposed a three-layer control framework based on Adaptive Model Predictive Control (AMPC). This framework, through its use of the AMPC algorithm and a dynamic weight adjustment mechanism, effectively coordinates the handling and lateral stability of DDEVs. This approach fully demonstrates the unique advantages of hierarchical control in handling multi-objective, time-varying nonlinear systems. Lee et al. [43] proposed a hierarchical architecture for integrated chassis control that fuses semi-active suspension and differential braking control. In the control allocation layer, they introduced suspension damping control based on a roll-region index, successfully achieving effective coordination between the semi-active suspension and differential braking, thereby simultaneously enhancing the vehicle’s lateral stability and roll control performance. Wang et al. [44], on the other hand, utilized a hierarchical control architecture to effectively address the real-time coordination challenges of path tracking, handling, and stability control for autonomous vehicles in actual driving scenarios. The study employed an adaptive coordinated control strategy based on Model Predictive Control (MPC). To enhance the model’s prediction accuracy, it used Adaptive Forgetting Factor Recursive Least Squares (AFF-RLS) to estimate tire cornering stiffness in real time. Additionally, the strategy combined phase plane analysis to delineate vehicle stability regions with an adaptive weight function adjustment to achieve a dynamic coordination of multiple control objectives. Under challenging conditions of a high speed, large curvature, and varying road adhesion, this method significantly improved the vehicle’s path tracking accuracy, handling flexibility, and lateral stability. Ultimately, this led to an optimization of the overall vehicle performance.
To more clearly elucidate the characteristics of different control architectures, Table 1 provides a comparative analysis of their key features. Decentralized control architectures offer a certain flexibility and economic benefits in terms of their development model. However, their operational mode, in which each subsystem functions independently, significantly constrains their coordinated control capabilities. This makes it difficult to achieve vehicle-level global optimization and, consequently, creates inherent limitations in fully exploiting the intrinsic over-actuated potential of DDEVs. Theoretically, centralized control architectures possess the potential to achieve a globally optimal control and can effectively avoid local control conflicts. However, they face several significant practical challenges. Their demands on the computational power of the central processing unit are extremely stringent, the system development complexity is high, and the risk of a single point of failure is prominent. This risk of the entire system failing from a single point of failure constitutes a significant technical bottleneck, especially for automotive chassis control systems that require an extremely high reliability. In comparison, hierarchical control architectures exhibit more balanced characteristics and prominent overall advantages in performance, flexibility, and reliability.

Table 1.
Comparison of coordinated control architectures for DDEVs.
In summary, the hierarchical control architecture is widely considered the mainstream technical direction for the future of coordinated chassis control in DDEVs, offering the greatest potential for development and application. This consensus is based on its outstanding performance in several key areas: handling complex system coupling, achieving multi-objective coordinated optimization, ensuring system reliability and scalability, and adapting to the over-actuated characteristics of DDEVs.
3. Two-Dimensional Coordinated Control Strategies for DDEV Chassis
Based on the combination of coordinated control for different motion directions, the two-dimensional coordinated control strategies for the chassis of DDEVs can be primarily classified into three typical modes: lateral–longitudinal coordination, lateral–vertical coordination, and longitudinal–vertical coordination. The following sections will provide a detailed analysis of these three types of coordinated control strategies, delving into their current research status and core control mechanisms, and they will offer a summary. They will also identify the core problems that urgently need to be solved at the current stage, while also providing an outlook on future developments.
3.1. Lateral and Longitudinal Coordinated Control Strategies
DDEV chassis possess independent driving and braking torque control capabilities at each wheel, offering unprecedented opportunities to enhance vehicles’ lateral handling stability, path tracking accuracy, and overall safety [49,50]. However, an inherent and complex nonlinear coupling relationship exists between the vehicle’s longitudinal and lateral motions. This coupling effect is particularly pronounced in extreme driving conditions such as high-speed cornering and emergency obstacle avoidance, or on slippery, uneven, and varying road conditions. For example, longitudinal acceleration or deceleration behavior directly alters the vertical load distribution on the tires, thereby affecting their cornering stiffness and the maximum lateral adhesion force they can generate [51]. Conversely, lateral steering maneuvers can also introduce disturbances to the vehicle’s maintenance of longitudinal speed and driving stability [52]. Therefore, by implementing effective longitudinal–lateral dynamics coordinated control, it is possible to further expand the vehicle’s handling stability boundaries and overall dynamic performance limits, while avoiding redundancy in distributed-drive control functions and potential dynamic conflicts [21,53].
Currently, control strategies based on coordination among various subsystems have become a widely adopted technical path in this field. In the lateral and longitudinal stability control of chassis, common subsystems include AFS [54], Active Rear Steering (ARS) [55], Four-Wheel Steering (4WS) [12], Direct Yaw moment Control (DYC) [56], the Anti-lock Braking System (ABS) [57], Traction Control System (TCS) [58], differential braking systems [59], and differential steering systems [60]. Existing research primarily focuses on the integration and optimization of advanced steering systems (particularly represented by AFS) and DYC. Therefore, coordinated control between these two has naturally become a research focus for many scholars.
Figure 4 shows a typical hierarchical coordinated control framework for the longitudinal and lateral dynamics of a distributed-drive chassis. In this framework, the upper-layer controller receives and processes steering and pedal operation commands from the driver and fuses environmental perception information. Based on the vehicle dynamics model, this layer is responsible for determining the desired vehicle motion state, for example, calculating the desired additional yaw moment required to maintain vehicle yaw stability. The core task of the middle-layer coordination controller is to rationally and optimally distribute the generalized control commands (such as the desired total longitudinal force and additional yaw moment) generated by the upper-layer controller to the individual independent actuators. Finally, the bottom-layer controller is responsible for execution. It first receives the specific torque or angle commands allocated by the middle layer. Then, while considering the physical limitations of the actuators (such as motor response rate and maximum output torque), it precisely drives each actuator via its respective drive/braking and steering controllers. This process ultimately achieves coordinated control of the vehicle’s longitudinal and lateral dynamics.
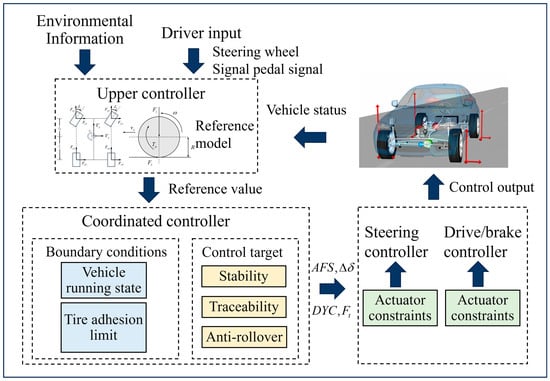
Figure 4.
Hierarchical cooperative control of steering and driving/braking systems.
Numerous advanced control theories have been successfully applied in the field of lateral and longitudinal coordinated control for DDEV chassis, including Linear Quadratic Regulator (LQR) [61], Sliding Mode Control (SMC) [62,63], MPC [64,65], feedforward–feedback control [66], and Multi-Agent Systems (MAS) theory [67,68]. Among these, MPC has received particularly widespread application and in-depth research due to its unique advantages in handling multivariable systems, explicitly considering constraints, and utilizing predictive models to optimize future behavior [69,70]. Researchers extensively utilize MPC to address the over-actuated characteristics of DDEVs and the complex coupling between lateral and longitudinal dynamics, aiming to enhance vehicle handling stability and path tracking accuracy. Specifically, Zhou et al. [71] proposed a hierarchical control system based on Nonlinear Model Predictive Control (NMPC). The upper-layer NMPC controller was designed to address the challenges of nonlinearity, Multi-Input Multi-Output (MIMO) characteristics, and over-actuation in the coordinated control of lateral and longitudinal motion for four-wheel independent-drive electric vehicles. To achieve this, the controller utilized a nonlinear three-degree-of-freedom vehicle model and a nonlinear tire model. Furthermore, it innovatively employed the wheel slip ratio as a virtual control input. Through Hardware-in-the-Loop (HIL) simulation validation, the system was shown to effectively satisfy comprehensive control objectives for lateral and longitudinal motion under various driving conditions, such as constant speed, acceleration, deceleration cruising, and driving on low-adhesion surfaces. Guo et al. [42] developed an AMPC framework. This framework innovatively includes three distinct components: a dynamic monitoring layer, an online optimization layer, and a bottom-layer control. First, the dynamic monitoring layer establishes a dynamic stability boundary based on the phase plane of the center of gravity’s sideslip angle versus its rate of change. It also designs variable weighting factors accordingly. Second, the online optimization layer constructs an AMPC strategy with adaptive objective weights. This strategy is capable of adjusting the relative weights of handling and lateral stability in the objective function in real time, based on weight information from the monitoring layer. Finally, the bottom-layer control achieves a precise and decoupled allocation of the driver-requested driving force and the upper layer’s calculated additional yaw moment. This is accomplished by optimizing the drive torque distribution error and tire utilization rate. Simulation results show that this strategy effectively enhances the vehicle’s handling flexibility under normal operating conditions and significantly improves lateral stability under extreme operating conditions.
MAS theory provides another effective approach for solving distributed coordinated control problems in complex large-scale systems. This theory provides an effective approach by decomposing complex global control problems into several simpler, independent subproblems. Each subproblem is then assigned to an individual agent for analysis and control. The decomposition process begins with a thorough analysis of the controlled object. This involves examining the interrelationships among its subsystems, their mechanisms of action, and their impact on overall system performance. Ultimately, this method facilitates the entire closed-loop control process, from dynamic modeling and real-time data acquisition to intelligent reasoning and decision-making [72,73,74]. Figure 5 illustrates a traditional mechanism model-based multi-agent coordinated control scheme for AFS and DYC, wherein AFS and DYC are treated as two independent agents that perform online optimization based on the vehicle’s physical model to formulate a coordinated control strategy. These strategies are then specifically implemented by lower-level execution controllers, acting upon the chassis system to achieve the dual objectives of enhancing path tracking accuracy and vehicle stability. When deeply integrated with advanced control methods and specific control architectures, the concept of decomposing complex systems and achieving control through agent coordination has attracted widespread attention and in-depth research from numerous scholars in the field of chassis coordinated control. For example, Zhang et al. [75] proposed a coordinated optimal control method based on MAS for AFS and DYC in Four-Wheel Independent-Drive Electric Vehicles (4WIDEV), where the four wheels of the vehicle are modeled as independent agents. This method transforms the vehicle’s complex high-dimensional model into four lower-dimensional agent models and employs Distributed Model Predictive Control (DMPC) and SMC for coordinated control, aiming to dynamically balance vehicle driving stability and energy economy. Research results show that, compared to traditional centralized control strategies, this MAS method can increase the solving speed of torque distribution by 32.33 times and reduce the average energy consumption of in-wheel motors by 16.6%, while ensuring driving stability under typical operating conditions such as constant-speed cornering and accelerating cornering. Cai et al. [76] adopted a multi-agent method based on Cooperative Distributed Model Predictive Control (Co-DMPC) for the coordinated control of Four-Wheel Drive/Four-Wheel Steering (4WD/4WS) vehicles. This method begins by establishing distributed state equations for both the steering and the drive/braking systems. These equations are designed to reflect the coupling between their respective states and control inputs. Next, it meticulously designs local optimization problems that feature cost function coupling. This is complemented by information exchange protocols and iterative solving mechanisms between the agents. Through this structured approach, the method achieves effective coordinated control of the vehicle’s complex coupled chassis system. This not only reduces the computational burden on each local controller but also effectively improves the vehicle’s path tracking accuracy, dynamic response speed, and overall driving stability.

Figure 5.
Mechanism model-based multi-agent AFS and DYC collaborative control method.
Table 2 further lists other relevant chassis lateral and longitudinal coordinated control strategies. From this, it can be seen that the combination of AFS and DYC is one of the most common and extensively researched coordinated control pairings. AFS is primarily responsible for providing precise lateral path guidance and improving vehicles’ transient response characteristics, while DYC effectively suppresses vehicles’ instability tendencies by actively generating direct yaw moment. Its effect is particularly significant under limit operating conditions where the tire adhesion force approaches saturation, and this inherent functional complementarity enables the combination to achieve significant results in enhancing vehicles’ handling stability and active safety. Furthermore, examining the control effects achieved by these studies, the vast majority point to improvements in vehicle stability (covering yaw stability, roll stability, etc.) and handling performance (such as path tracking accuracy, steering sensitivity). This profoundly reflects the fundamental original intention and core objectives of chassis integrated control research, namely ensuring vehicles’ controllability and safety under various complex driving conditions. In the field of chassis lateral and longitudinal coordinated control, improving and assuring handling stability remains the primary and most common research pursuit. This holds true even though ride comfort and energy economy are also important evaluation metrics, often considered as secondary optimization objectives or constraints in many studies.
Table 2.
Lateral and longitudinal cooperative control strategies.
3.2. Lateral and Vertical Coordinated Control Strategies
An inherent and complex coupling relationship also exists between the vehicle’s lateral and vertical dynamics, and this coupling effect has a direct and significant impact on both the vehicle’s handling stability and ride comfort [85,86]. For example, when an ASS designed to enhance ride comfort actively adjusts the vehicle’s body attitude, it inevitably alters the instantaneous vertical load on each wheel. This load variation will directly affect the tires’ effective cornering stiffness and the maximum lateral adhesion force they can generate, thereby posing potential constraints on the vehicle’s steering response characteristics and limit its handling performance [87].
DDEVs, by virtue of their architectural characteristic of independent, rapid, and precise controllability of each wheel’s driving/braking torque, provide a more flexible and powerful platform for integrating and efficiently coordinating key chassis subsystems such as AFS [88,89] and ASS/SAS [90,91,92].
The key to implementing this type of lateral and vertical coordinated control lies in constructing an advanced control strategy capable of integrating multi-source information. This strategy must perceive in real time and comprehensively assess the vehicle’s dynamic states in both lateral (e.g., yaw rate, sideslip angle of the center of gravity, lateral acceleration) and vertical (e.g., roll angle, suspension travel, wheel load) dimensions, and based on this, perform a synchronized and optimized allocation of control commands. This requires the coordination of multiple key subsystems. ASS/SAS are responsible for the precise control of vertical forces and the suppression of vehicle roll and pitch. Simultaneously, active steering and differential braking systems affect the vehicle’s lateral dynamic behavior. A high degree of command sharing and action coordination among these systems is essential to ultimately optimize the overall vehicle performance.
Figure 6 shows a typical hierarchical coordinated control framework for the lateral and vertical dynamics of DDEVs. The upper-layer controller determines the desired vehicle motion state based on driver input and environmental road information, in conjunction with relevant lateral and vertical vehicle dynamics reference models. The middle-layer controller first receives the desired targets from the upper layer. It then calculates the generalized forces and moments needed to achieve these targets, such as the desired additional yaw moment for the steering system and the total adjustment force for the suspension system. This calculation is based on the vehicle’s dynamics model and current state. While performing this task, the controller also adjusts the weights of the responding subsystems according to different control objectives. The main vertically coordinated subsystems include SAS and ASS. Its schematic diagram is shown in Figure 7. SAS actively adjusts the damping force magnitude of its shock absorbers based on real-time perceived road unevenness and vehicle body vibration information. By varying the rate of energy absorption and dissipation by the suspension for wheel hop and body motion, it optimizes tire–ground adhesion and attenuates the transmission of vibrations to the vehicle body, thereby improving the vehicle’s ride comfort and handling stability without actively inputting energy, and to some extent it assists in controlling the vehicle’s roll and pitch attitudes [93,94,95]. ASS incorporates an actuation system capable of actively generating and outputting force, along with complex control units. Based on the vehicle’s real-time dynamic parameters and road preview or real-time feedback information, it can not only adjust damping characteristics but also actively apply or absorb energy to generate precise control forces to independently control the vertical motion of each wheel. Through the active control of the suspension system, changes in vehicle body attitude (such as roll angle) can be reduced to varying degrees, and the dynamic tendencies of the vehicle’s body can be suppressed, thereby better balancing and satisfying the comprehensive requirements for vehicles’ ride comfort and handling stability [96,97,98].
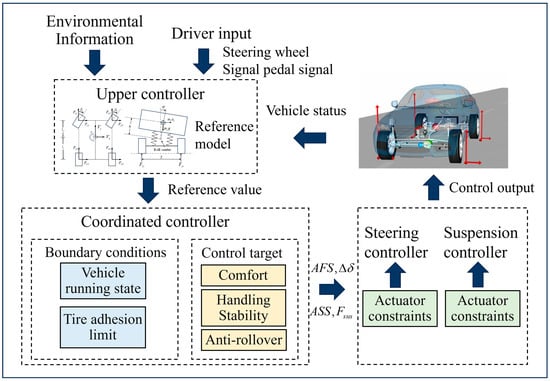
Figure 6.
Hierarchical cooperative control of steering and suspension systems.
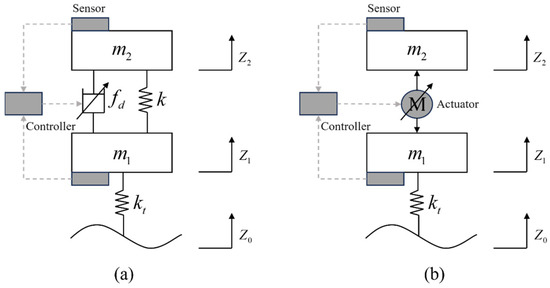
Figure 7.
Schematic diagrams of (a) semi-active suspension and (b) active suspension.
In coordinated control frameworks, various control algorithms have emerged in the research field to achieve complex coordinated control objectives for vehicles’ lateral and vertical dynamics; Table 3 lists common lateral–vertical coordinated control strategies. Among these, SMC [99,100,101] has gained a widespread application in vehicles’ dynamic control due to its strong robustness against system parameter uncertainties and external disturbances. Lee et al. [43], in their research into an integrated control strategy for semi-active suspension and differential braking, employed SMC to construct the upper-layer controller for generating the desired yaw control moment and roll control moment. Fuzzy Logic Control (FLC) [102,103] is another important control strategy. Its prominent advantages lie in not relying on an accurate mathematical model of the controlled object and being able to conveniently incorporate the designer’s empirical knowledge and heuristic rules. This makes FLC exhibit a good applicability and flexibility in handling highly nonlinear complex systems with significant uncertainties, as well as in dynamically allocating weights among multiple objectives or adaptively adjusting controller parameters within hierarchical control architectures. For example, in their research on coordinated control for multi-axle steering and active suspension systems, Chen et al. [104] developed a strategy to dynamically balance handling stability and ride comfort. Their approach utilized fuzzy logic algorithms to adjust the weighting coefficients between two controllers: a Dual Sliding Mode Controller (DSM) and a Dual Linear Quadratic Regulator (DLQR). This adjustment was performed in real time, based on the vehicle’s speed and front-wheel steering angle. As a result, their method effectively coordinated the vehicle’s dynamic demands under various driving conditions. Similarly, Hu et al. [105], in their roll controller design for active suspension, also utilized fuzzy control to adaptively adjust the parameters of a proportional–integral (PI) controller based on real-time roll angle error and its rate of change, to cope with varying operating conditions and enhance the adaptability of the control system. March et al. [106] applied Fuzzy Logic Control to coordinate AFS and ASS. In their scheme, the output of the fuzzy controller served as the reference input for the lower-level suspension normal force controller. Simulation results verified that this integrated chassis control scheme achieved a more effective and comprehensive improvement in overall vehicle performance compared to independent subsystem control. MPC is also finding an increasing application in lateral–vertical coordinated control, being capable of synergistically optimizing suspension systems, steering systems, and even DDEV drive torques within a single framework. For example, Xiao et al. [107] proposed an ideal integrated control architecture for AFS, ASS, and DYC, structured with high-level and low-level controllers. In the high-level controller, they utilized an MPC algorithm. This algorithm determines the constrained optimal control targets, including the four-wheel longitudinal forces, front tire lateral forces, and a supplementary roll moment. Subsequently, the low-level controller is responsible for implementation. It uses an optimal distribution algorithm for the actuators and tire slip controllers to execute the control actions computed by the high-level MPC. Furthermore, MAS theory and learning-based control methods also provide new perspectives for solving such complex coordination problems. Liang et al. [86] adopted a distributed MAS architecture, wherein AFS and ASS are treated as independent agents, each employing a Multi-constraint Distributed Model Predictive Control (MDMPC) strategy. This architecture allows AFS and ASS agents to work cooperatively through information exchange while handling multiple system constraints, aiming to jointly optimize the vehicle’s lateral and vertical dynamic performance, ultimately enhancing the vehicle’s comprehensive handling performance, safety, and comfort. Its effectiveness has been validated through simulation analysis and Hardware-in-the-Loop (HIL) testing. In terms of learning-based control, Xu et al. [108] applied a Generalized Regression Neural Network (GRNN) to construct inverse system models of AFS and Hydraulic Power Suspension (HPS). The study first analyzed the coupling characteristics between AFS and HPS, and then utilized the GRNN to learn and identify the inverse dynamics characteristics of these two subsystems. The inputs to the GRNN are the state variables of the AFS and HPS systems, and its outputs directly serve as the desired steering commands for AFS and the desired actuator control commands for HPS. Through this decoupling control strategy based on the GRNN inverse system model, effective decoupling and coordinated control of the vehicle’s lateral (dominated by AFS) and vertical (dominated by HPS) motions were ultimately achieved.
Table 3.
Lateral and vertical cooperative control strategies.
Prospectively, research on coordinated lateral and vertical control for DDEV chassis will deepen towards a more profound understanding of coupling mechanisms, more comprehensive performance optimization, and engineering implementation closer to practical applications. Further research is needed to provide a more solid foundation for the design of coordinated control strategies. A primary requirement is to deepen the understanding of lateral and vertical coupling mechanisms, especially under extreme and highly dynamic conditions. Additionally, there is a need to develop advanced models. This includes creating online parameter identification methods and high-fidelity coupled dynamics models that can accurately capture tires’ nonlinear characteristics, suspension’s dynamic responses, and complex vehicle body attitude changes. Simultaneously, future research will focus on multi-objective adaptive optimization and personalized driving/riding experiences. Building on the existing balance of handling stability and comfort, more dimensional objectives such as energy consumption (e.g., of the active suspension), component durability, driver’s driving intention, and personalized preferences will be incorporated into a unified optimization framework. Research will investigate adaptive weight adjustment mechanisms and learning-based optimization algorithms to meet the dynamic and personalized demands of different driving scenarios and user requirements.
3.3. Longitudinal and Vertical Coordinated Control Strategies
Under the DDEV chassis architecture, significant coupling effects exist between the vehicle’s longitudinal and vertical dynamic behaviors [109,110]. Specifically, the longitudinal motion (such as acceleration and braking) and vertical motion (such as suspension’s compression and rebound, vehicle body pitch) during vehicles’ operation constitute a dynamic interactive system. This coupling relationship exhibits a clear bidirectional nature: longitudinal control actions (such as driving or braking) directly cause a shift in the vehicle’s center of gravity, thereby inducing vertical dynamic responses (like vehicle pitch and changes in suspension travel). Conversely, vertical disturbances (such as road unevenness or impacts) affect longitudinal traction/braking performance by altering tires’ normal loads and may even lead to traction force fluctuations or sudden changes in adhesion conditions. Simultaneously, this coupling relationship also has a dual nature: On the one hand, it poses a challenge to traditional decoupled control strategies, as control input in a single direction inevitably causes responses in other degrees of freedom, increasing the system design complexity. On the other hand, this characteristic also provides new opportunities for the development of integrated control strategies. Thanks to the independent controllability of each wheel drive unit in DDEV chassis and the introduction of vertical executive units like active suspension, cross-dimensional information fusion and control coordination can be achieved at the control system level. For example, by precisely adjusting the longitudinal driving/braking torque of each wheel, the vehicle pitch attitude can be actively regulated to enhance vertical ride comfort and driving stability. Meanwhile, active suspension systems can improve the efficiency of vehicles’ longitudinal acceleration response and traction/braking limits by optimizing wheels’ normal load distribution. As shown in Figure 8, a typical hierarchical coordinated control framework features a middle-layer coordination controller. This controller decomposes control tasks for various actuators (such as drive motors, active suspension, and braking systems) based on upper-layer commands, control objectives, and boundary conditions. Within this framework, the design of the coordinated control strategy is of crucial importance.
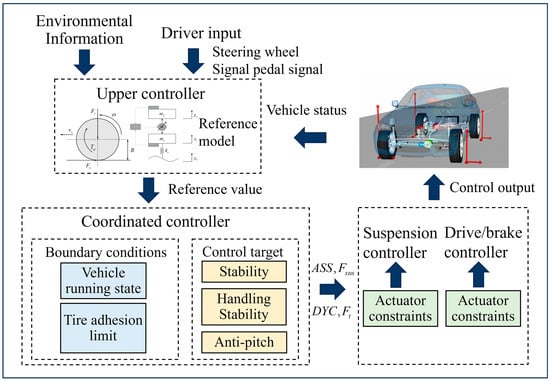
Figure 8.
Hierarchical cooperative control of driving/braking and suspension systems.
At the current stage, longitudinal and vertical coordinated control strategies can be broadly categorized in three ways based on their primary objectives. The first category centers on enhancing ride comfort and vehicle body attitude control. The second focuses on improving handling stability and optimizing traction and braking performance. The third category is oriented towards improving the overall vehicle energy efficiency while also considering dynamic performance.
When a vehicle accelerates/decelerates, brakes, or drives on uneven roads, the significant coupling of longitudinal and vertical dynamics can easily lead to undesirable body attitudes such as pitch, directly affecting ride comfort and handling stability. These types of coordinated control strategies aim to effectively suppress vehicle body attitude changes and enhance ride smoothness by coordinating drive/braking systems and suspension systems. Valdivieso-Soto et al. [111] utilized in-wheel motors for the active control of vehicle pitch motion. They adopted a control strategy based on Lyapunov functions to actively suppress vehicle pitch. The core of this strategy was to leverage the coupling relationship between longitudinal forces and pitch motion. By precisely regulating the drive/brake torque of each in-wheel motor, the system actively generated a corrective moment. As a result, this method effectively attenuated the vehicle pitch’s angular velocity and angular acceleration under various operating conditions. Zhang et al. [112] studied the coordinated smoothness control of active suspension and braking intensity. The study employed MPC to regulate the active suspension and regarded braking intensity as a disturbance or known input to the suspension control. By establishing a longitudinal–vertical coupled dynamics model to predict vehicle attitude changes during braking and actively adjusting the suspension parameters, the experimental results showed that this coordinated strategy could effectively suppress the “nosedive” phenomenon during braking, reduce the vertical acceleration impact, and improve ride comfort. Furthermore, Meng et al. [113] proposed a method for suppressing transient suspension impacts based on vehicle speed control. After onboard sensors identify road bump excitations, this method uses fuzzy control to regulate the vehicle speed, simultaneously implements MPC for the ASS, and dynamically adjusts control weights to adapt to changes in vehicle speed. Simulation results demonstrate that, compared to sole suspension control, this coordinated strategy can improve vehicles’ performance at different stages, further enhancing driving safety and ride comfort.
Under extreme operating conditions (such as acceleration on low-adhesion surfaces or emergency braking), the coupling of longitudinal forces and vertical loads is crucial for the tire adhesion utilization rate and overall vehicle stability. These types of coordinated control strategies are dedicated to maximizing tire potential and enhancing vehicles’ handling stability, traction, and braking performance by optimizing the vertical load distribution and precisely controlling longitudinal forces. Wang et al. [114] implemented the integrated control of ASS and ABS based on a T-S fuzzy neural network model. Experimental results showed that this method could effectively shorten the braking time and distance and demonstrated a good, robust performance on rough road surfaces. Another study by Wang et al. [115] adopted a fusion control strategy combining MPC and SMC, observed dynamic vertical loads on wheels using an Extended Kalman Filter (EKF), and addressed control signal delays using a Synchronous Phase Pre-compensation Calculator (SPPC). This ultimately achieved synchronized control of the drive system and active suspension, significantly enhancing the vehicle’s extrication capability and driving stability on low-adhesion surfaces such as ice, snow, and sand.
Longitudinal–vertical coordinated control for DDEV chassis not only focuses on enhancing their dynamic performance but can also improve overall energy utilization efficiency of the vehicle through methods such as optimizing energy recovery. Zhang et al. [112] proposed a coordinated control method incorporating neuro-fuzzy control and MPC. This method first establishes a longitudinal–vertical coupled model under braking conditions, uses MPC to regulate active suspension to enhance ride comfort, and treats braking intensity as a disturbance input. Simultaneously, to improve energy recovery efficiency, a neuro-fuzzy optimization framework was designed to optimize membership functions, achieving control of the powertrain, with this framework considering the constraints imposed by the vehicle’s vertical motion on braking torque. Simulation results show that the proposed coordinated control method can simultaneously improve the vehicle’s energy recovery efficiency and ride comfort, achieving multi-objective coordinated optimization. Similarly, Huang et al. [116] adopted a fuzzy coordinated control strategy between a composite braking system and active suspension, aiming to synergistically improve braking energy recovery efficiency and braking safety, thereby optimizing the overall performance of the vehicle chassis. Table 4 lists common longitudinal–vertical coordinated control strategies.
Table 4.
Longitudinal and vertical cooperative control strategies.
In summary, research on longitudinal–vertical coordinated control for DDEV chassis has made significant progress. The effective coordination of multiple subsystems—including drive, braking, and suspension—has demonstrated great potential to enhance vehicle ride comfort, handling stability, driving performance under extreme conditions, and even energy utilization efficiency. However, current research still faces numerous common and specific challenges. First, accurate vehicle dynamics modeling and real-time parameter identification remain bottlenecks. This is especially true for obtaining online tire–road adhesion states and dynamic vertical loads and for addressing model uncertainties and nonlinear coupling effects. Second, while suppression strategies exist, the issue of an increased unsprung mass from in-wheel motor systems and its negative impacts on ride smoothness and tire grounding still requires more optimized solutions. Finally, achieving a dynamic optimal balance between conflicting performance objectives (such as comfort versus handling stability) is a key aspect that needs to be deepened. This also includes the on-vehicle validation and improvement of evaluation systems for coordinated control strategies under real, complex, and extreme operating conditions.
4. Three-Dimensional Coordinated Control Strategies for DDEV Chassis
In the field of coordinated chassis control for DDEVs, following significant progress in various two-dimensional (e.g., longitudinal–lateral, longitudinal–vertical) dynamic coordinated control strategies, the research focus has further expanded to integrated the coordinated control of lateral, longitudinal, and vertical (three-dimensional) aspects to achieve a more comprehensive improvement in overall vehicle dynamic performance. Currently, for such complex three-dimensional coordinated control problems, the adopted strategies can be mainly divided into two major technical directions: weight-based allocation (Figure 9) and optimization-based approaches (Figure 10).
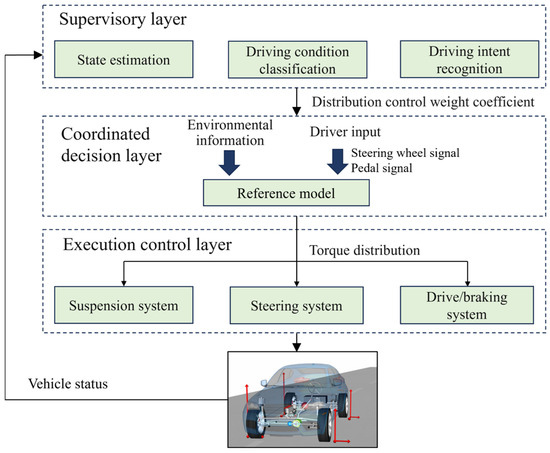
Figure 9.
Three-dimensional lateral–longitudinal–vertical cooperative control based on weight allocation.
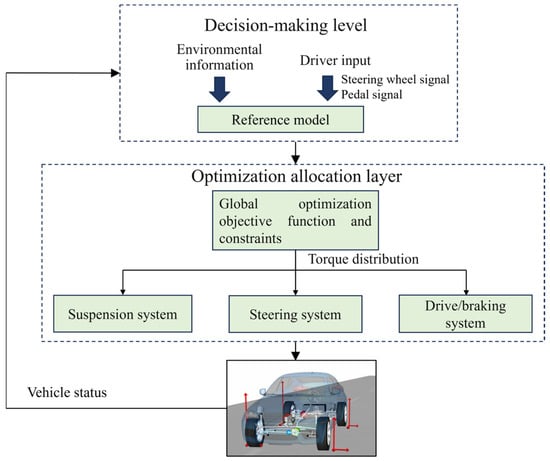
Figure 10.
Three-dimensional cooperative control in lateral, longitudinal, and vertical directions based on weight allocation.
The core idea of weight-based allocation strategies for three-dimensional coordinated control lies in dynamically assigning weighting factors to the contributions of different control objectives (such as driving stability, ride comfort, path tracking accuracy) or actuators (such as steering system, drive/braking system, suspension system). These weighting factors are adaptively adjusted according to real-time varying vehicle states, driver intention, or the driving environment, aiming to achieve a refined comprehensive coordination of the vehicle’s longitudinal, lateral, and vertical dynamics under complex and variable operating conditions. The advantage of this strategy is that its control logic is relatively intuitive, and it exhibits a high execution efficiency under specific conditions.
Zhao et al. [117] proposed a hierarchical control strategy to coordinate ASS, AFS, and DYC. In this architecture, the upper-layer controller calculates the total corrective yaw moment required by the vehicle and allocates this moment to the ASS and the middle-layer controller according to a preset linear weighting coefficient q, reflecting an initial weight division for vertical and lateral control actions in the top-level design. Subsequently, the middle-layer controller employs an adaptive fuzzy control method to dynamically coordinate the control actions of AFS and DYC according to different operating regions determined by real-time parameters such as wheel sideslip angle and tire–road friction force. This fuzzy logic-based adaptive adjustment achieves a more refined dynamic weight allocation or control priority adjustment. Finally, the lower-layer controller is responsible for accurately tracking the local control targets of the respective subsystems. Through this multi-level, multi-mechanism weight allocation and coordination, this strategy effectively achieves a coordinated control of longitudinal, lateral, and vertical dynamics, enhancing vehicles’ lateral stability and vertical performance including ride comfort and trajectory tracking capability.
Complementing the aforementioned strategies that focus on the continuous or fuzzy adaptive adjustment of weighting coefficients, coordinated control strategies based on mode switching achieve three-dimensional coordination by applying various preset control modes according to different vehicle states and driving conditions. Each mode typically corresponds to a specific set of weight allocation schemes or control priorities.
Chen et al. [118] proposed an integrated control strategy for braking, yaw, and roll that fuses mode switching with dynamic weights. This strategy adopts a hierarchical structure, wherein its monitoring layer dynamically divides the vehicle’s operating state into four control modes based on vehicle yaw rate deviation and Time-to-Rollover (TTR) index: normal braking, braking–yaw integrated, braking–roll integrated, and braking–yaw–roll three-dimensionally integrated. This mode division directly determines the weighting coefficients of various control components (such as the sideslip angle of the center of gravity, yaw rate, load transfer ratio, and braking force) in the objective function of the upper-layer NMPC. These weighting coefficients are pre-optimized and set for different control modes, ensuring that when specific risks (such as sideslip or rollover) are identified, the controller can prioritize stabilizing the corresponding vehicle dynamics. This method cleverly combines discrete mode judgment with continuous optimal control, achieving an effective coordination of longitudinal, lateral, and vertical aspects. The accurate assessment of driving conditions is also key to successful mode switching. Fegani et al. [119] designed a specific vehicle state monitor based on key parameters such as slip ratio to evaluate in real time the criticality of the current driving situation. Based on the monitor’s output, the control system can intelligently schedule the intervention timing and intensity of three control actions: braking, steering, and suspension. Through an advanced LPV/H∞ control framework, this strategy achieves a smooth coordination between actuators, ensures robustness and stability during mode switching under different operating conditions, and significantly improves the overall dynamic behavior of the vehicle. This study conducted simulations on a complex, experimentally validated full-vehicle model, verifying its effectiveness. However, the researchers also pointed out that when actually deployed on a real vehicle, sensor noise, actuator delays, and robustness under variable environmental conditions still require further validation, and the parameter scheduling of the LPV controllers is highly dependent on an accurate estimation of vehicle states. To pursue its broader adaptability, Zhao et al. [120] proposed an adaptive mode switching coordinated control strategy for lateral, longitudinal, and vertical dynamics based on stability domains. The core of this strategy lies in adaptively switching between various preset control modes by the online identification of current driving conditions (such as driver operations, vehicle speed, road adhesion) and the vehicle’s comprehensive stability state (multi-dimensional information such as yaw, roll, and pitch). Each mode corresponds to specific control logic and weight configurations for longitudinal, lateral, and vertical subsystems, aiming to optimize comprehensive performance factors such as stability, comfort, safety, and economy under different driving conditions. This stability domain-based adaptive switching mechanism enables the control system to more proactively respond to complex and variable driving environments.
In conclusion, three-dimensional coordinated control strategies based on weight allocation (including mode switching) achieve an effective coordination of the vehicle’s longitudinal, lateral, and vertical dynamics by dynamically adjusting the weighting relationships between various control objectives or actuators through predefined rules, state monitoring, or optimization algorithms.
Contrasting with weight-based allocation methods, optimization-based coordinated control strategies formally define the complex coordination task of multiple chassis subsystems as a mathematical optimization problem.
Hierarchical control architectures, due to their inherent modular characteristics and effective management capability for complex system control tasks, are also widely used in vehicles’ three-dimensional coordinated control and are often deeply integrated with various optimization algorithms. Zhao et al. [20] proposed a modularly integrated longitudinal, lateral, and vertical vehicle stability control strategy. In this hierarchical architecture, the upper-level vehicle body control layer employs a Nonlinear Sliding Mode Control (NSMC) algorithm to calculate the total control forces and moments required by the vehicle based on higher-level commands (such as desired path, stability objectives). The introduction of SMC aims to enhance systems’ robustness against model uncertainties and external disturbances. The middle layer is designed as a tire force allocation layer, which, through advanced optimization algorithms, optimally allocates the generalized control forces and moments calculated by the upper layer to the longitudinal and lateral forces of each wheel. This allocation process also indirectly influences the dynamic distribution and effective utilization of vertical loads. The lower-level actuator control layer is responsible for precisely driving the corresponding actuators to accurately achieve the optimal tire force output determined by the middle layer. This study aims to comprehensively enhance vehicles’ driving safety, handling stability, ride comfort, and road tracking capability. Chen et al. [121] proposed a Unified Chassis Control (UCC) strategy. This strategy, through an ingenious fixed-point control allocation algorithm, effectively allocates the generalized control forces/moments calculated by the upper-layer controller to the target slip ratio and slip angle for each tire. It is noteworthy that for driving conditions on uneven roads, this study designed an H∞ robust controller based on a modified quarter-vehicle model to ensure the performance and stability of vertical control. Furthermore, to address the issue of the instantaneous loss of tire contact force that may be caused by emergency situations such as uneven roads or tire blowouts, the strategy also introduced a Reconfigurable Control Allocation (RCA) method, significantly enhancing the system’s fault tolerance and robustness. The core concept of UCC lies in implementing a unified coordinated management and optimal allocation for all key chassis actuators, with a particular focus on the importance of maintaining tire contact stability under vertical disturbances and enhancing the system’s robust adaptability. The ultimate goal is to comprehensively improve vehicles’ driving stability and ride comfort. Table 5 lists common longitudinal, lateral, and vertical coordinated control strategies.
Table 5.
Longitudinal, lateral, and vertical cooperative control strategies.
In summary, research on coordinated chassis control for DDEVs has entered a new stage of the integrated coordination of lateral, longitudinal, and vertical (three-dimensional) aspects, aiming to achieve the comprehensive optimization of overall vehicle dynamic performance. To achieve this goal, researchers have explored various advanced coordinated control approaches. One prominent class of these methods focuses on achieving a comprehensive coordination of the vehicle’s three-dimensional dynamics. This is accomplished by dynamically adjusting either the relative importance of various control objectives (such as stability, comfort, and path tracking) or the action priorities among the executive systems (steering, drive/braking, and suspension). This typically involves using adaptive rules, vehicle state-based mode switching logic, or specific optimization algorithms to finely tune the contributions of various control aspects, achieving positive results in balancing multiple performance indicators. Another class of methods formulates the complex three-dimensional coordination problem as a unified control command-solving framework, by defining an evaluation system that comprehensively reflects the desired overall performance and systematically seeking an optimal combination of control actions under the premise of strictly adhering to vehicles’ dynamic characteristics, actuator capability boundaries, and driving safety constraints. Such methods often utilize techniques like Model Predictive Control for the prospective and integrated management of multiple subsystems, demonstrating significant potential in enhancing path tracking accuracy, handling stability, ride comfort, and system robustness. Looking to the future, three-dimensional integrated coordinated control for DDEV chassis will deeply integrate artificial intelligence technologies, advancing to a new stage of intelligent decision-making characterized by autonomous learning and personalized adaptation capabilities. By developing theories for a global performance integration and multi-objective dynamic balancing, the aim is to expand vehicle performance boundaries under complex and even extreme operating conditions and to significantly enhance active adaptability and safety in variable environments by leveraging advanced multi-source perception and predictive control.
5. Discussion
The core of research on coordinated chassis control for DDEVs is to maximize the potential of the independent drive/braking of each wheel to enhance the overall vehicle performance, and the key to achieving this goal lies in effective multi-subsystem coordination. In the choice of control architecture, hierarchical architecture, due to its comprehensive advantages in task decoupling, balancing global and local control, and system flexibility, has become an industry consensus and the mainstream direction for future development. On this basis, research on coordinated control strategies has gradually deepened, evolving from two-dimensional coupling to three-dimensional integration. At the level of two-dimensional coordinated control, significant progress has been made. Researchers have successfully enhanced handling stability and path tracking accuracy, balanced ride comfort, and optimized energy efficiency for specific objectives. These advancements were achieved through two primary means. The first was the precise coordination of key subsystems, such as Active Steering, Direct Yaw moment Control, Active/Semi-Active Suspension, and differential drive/braking. The second involved leveraging advanced algorithms like Model Predictive Control (MPC), Sliding Mode Control (SMC), Fuzzy Logic Control (FLC), and Multi-Agent Systems (MASs). However, this progress has also revealed ongoing challenges, particularly in the areas of accurate modeling, online parameter identification, and multi-objective conflict resolution. Furthermore, to achieve a more comprehensive optimization of overall vehicle dynamic performance, research has advanced towards integrated three-dimensional (lateral–longitudinal–vertical) coordinated control. This advanced control is typically implemented through two main approaches: methods based on weight allocation (including mode switching) and those based on global optimization. Both approaches conduct a higher-level regulation and performance optimization of the vehicle’s multi-dimensional dynamics. This evolution signifies a clear trend in chassis control towards higher levels of integration and intelligence.
Looking to the future, coordinated chassis control technology for DDEVs will evolve towards deeper levels of intelligence and refinement. Its core lies in first breaking through the bottlenecks in the high-precision modeling and real-time perception of complex vehicle dynamic behavior, especially online tire–road interactions and the precise transmission of vertical loads, to provide a solid physical basis and accurate state inputs for subsequent advanced control strategies. On this foundation, future research will primarily focus on overcoming the limitations of existing control theories, particularly in computational efficiency and nonlinear processing capabilities. A promising path forward is the deep integration of artificial intelligence algorithms, such as reinforcement learning and neural networks. By doing this, coordinated control systems can be endowed with capabilities for autonomous learning, online optimization, and personalized adaptation. This will ultimately drive a paradigm shift from traditional model-based control to an intelligent control framework that combines both data-driven and model-based approaches. Ultimately, these technological advancements will deeply serve high-level autonomous driving. Through standardized integration architectures and comprehensive testing and validation systems, an efficient linkage between chassis coordinated control and autonomous driving decision-making and planning layers will be promoted, achieving an optimization of vehicle performance and driving intelligence in all scenarios.
Funding
This work has been supported by the National Natural Science Foundation of China (52225212, 52272418, U22A20100) and the National Key Research and Development Program of China (2022YFB2503302).
Institutional Review Board Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
We would like to extend our gratitude to all the researchers and professionals.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Zhu, X.; Chikangaise, P.; Shi, W.; Chen, W.-H.; Yuan, S. Review of Intelligent Sprinkler Irrigation Technologies for Remote Autonomous System. Int. J. Agric. Biol. Eng. 2018, 11, 23–30. [Google Scholar] [CrossRef]
- Li, H.; Geng, W.; Hassan, M.M.; Zuo, M.; Wei, W.; Wu, X.; Ouyang, Q.; Chen, Q. Rapid Detection of Chloramphenicol in Food Using SERS Flexible Sensor Coupled Artificial Intelligent Tools. Food Control 2021, 128, 108186. [Google Scholar] [CrossRef]
- Bo, W.; Xiaoxue, D.; Yana, W.; Hanping, M. Multi-Machine Collaboration Realization Conditions and Precise and Efficient Production Mode of Intelligent Agricultural Machinery. Int. J. Agric. Biol. Eng. 2024, 17, 27–36. [Google Scholar] [CrossRef]
- Li, Y.; Xu, L.; Lv, L.; Shi, Y.; Yu, X. Study on Modeling Method of a Multi-Parameter Control System for Threshing and Cleaning Devices in the Grain Combine Harvester. Agriculture 2022, 12, 1483. [Google Scholar] [CrossRef]
- Zhang, Z.; Lu, Y.; Zhao, Y.; Pan, Q.; Jin, K.; Xu, G.; Hu, Y. TS-YOLO: An All-Day and Lightweight Tea Canopy Shoots Detection Model. Agronomy 2023, 13, 1411. [Google Scholar] [CrossRef]
- Zhai, X.; Li, Z.; Zhang, J.; Shi, J.; Zou, X.; Huang, X.; Zhang, D.; Sun, Y.; Yang, Z.; Holmes, M.; et al. Natural Biomaterial-Based Edible and pH-Sensitive Films Combined with Electrochemical Writing for Intelligent Food Packaging. J. Agric. Food Chem. 2018, 66, 12836–12846. [Google Scholar] [CrossRef]
- Jose, A.; Shrivastava, S. Evolution of Electrical Vehicles, Battery State Estimation, and Future Research Directions: A Critical Review. IEEE Access 2024, 12, 158627–158646. [Google Scholar] [CrossRef]
- Fesli, U.; Ozdemir, M.B. Electric Vehicles: A Comprehensive Review of Technologies, Integration, Adoption, and Optimization. IEEE Access 2024, 12, 140908–140931. [Google Scholar] [CrossRef]
- Hu, Z.; Mehrjardi, R.T.; Ehsani, M. On the Lifetime Emissions of Conventional, Hybrid, Plug-in Hybrid and Electric Vehicles. IEEE Trans. Ind. Applicat. 2024, 60, 3502–3511. [Google Scholar] [CrossRef]
- Yu, Y.; Hao, S.; Guo, S.; Tang, Z.; Chen, S. Motor Torque Distribution Strategy for Different Tillage Modes of Agricultural Electric Tractors. Agriculture 2022, 12, 1373. [Google Scholar] [CrossRef]
- Jiangyi, H.; Fan, W. Design and Testing of a Small Orchard Tractor Driven by a Power Battery. Eng. Agríc. 2023, 43, e20220195. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, S.; Zhao, X.; Zheng, Z. Path Tracking and Handling Stability Coordinated Control of 4WS and DYC for Distributed In-Wheel Motor Drive Electric Vehicle Under Extreme Conditions. IEEE Trans. Veh. Technol. 2024, 73, 18402–18417. [Google Scholar] [CrossRef]
- Feng, Z.; Zhao, S.; Gao, W.; Zhang, Y.; Fei, L. Study on a Novel In-Wheel Motor Driving System Driven by Two Permanent Magnet Synchronous Disc Motors. IEEE Trans. Veh. Technol. 2023, 72, 5922–5933. [Google Scholar] [CrossRef]
- Dong, H.; Xi, J. Model Predictive Longitudinal Motion Control for the Unmanned Ground Vehicle with a Trajectory Tracking Model. IEEE Trans. Veh. Technol. 2022, 71, 1397–1410. [Google Scholar] [CrossRef]
- Azzaghdam, E.T.; Alankus, O.B. Longitudinal Control of Autonomous Vehicles Consisting Power-Train with Non-Linear Characteristics. IEEE Trans. Intell. Veh. 2022, 7, 133–142. [Google Scholar] [CrossRef]
- Alves, J.A.V.; Chinelato, C.I.G.; Angelico, B.A. Vehicle Lateral Stability Regions for Control Applications. IEEE Access 2022, 10, 87787–87802. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, L.; Liu, S.; Wang, J. Event-Triggered Adaptive Fuzzy Approach-Based Lateral Motion Control for Autonomous Vehicles. IEEE Trans. Intell. Veh. 2024, 9, 1260–1269. [Google Scholar] [CrossRef]
- Xu, H.; Liu, J.; Luo, T.; Yao, Y.; Lv, C. Model-Based Design of an Active Suspension for the Improvement of In-Wheel Motor Drive Electric Vehicle. IEEE Access 2024, 12, 45597–45615. [Google Scholar] [CrossRef]
- Liu, S.; Zhang, L.; Liu, Y.; Wang, J.; Yang, C.; Zhang, J. Motion Posture Control of Corner Module Architecture Intelligent Electric Vehicle on Deep-Potholed Roads. IEEE/ASME Trans. Mechatron. 2024, 29, 4480–4491. [Google Scholar] [CrossRef]
- Zhao, H.; Chen, W.; Zhao, J.; Zhang, Y.; Chen, H. Modular Integrated Longitudinal, Lateral, and Vertical Vehicle Stability Control for Distributed Electric Vehicles. IEEE Trans. Veh. Technol. 2019, 68, 1327–1338. [Google Scholar] [CrossRef]
- Wang, Z.; Ding, X.; Zhang, L. Chassis Coordinated Control for Full X-by-Wire Four-Wheel-Independent-Drive Electric Vehicles. IEEE Trans. Veh. Technol. 2023, 72, 4394–4410. [Google Scholar] [CrossRef]
- Skrickij, V.; Kojis, P.; Šabanovič, E.; Shyrokau, B.; Ivanov, V. Review of Integrated Chassis Control Techniques for Automated Ground Vehicles. Sensors 2024, 24, 600. [Google Scholar] [CrossRef] [PubMed]
- Yu, F.; Li, D.-F.; Crolla, D.A. Integrated Vehicle Dynamics Control—State-of-the Art Review. In Proceedings of the 2008 IEEE Vehicle Power and Propulsion Conference, Harbin, China, 3–5 September 2008; IEEE: New York, NY, USA, 2008; pp. 1–6. [Google Scholar]
- Yang, S.; Zhai, C.; Gao, Y.; Dou, H.; Zhao, X.; He, Y.; Wang, X. Planting Uniformity Performance of Motor-Driven Maize Precision Seeding Systems. Int. J. Agric. Biol. Eng. 2022, 15, 101–108. [Google Scholar] [CrossRef]
- Xu, S.; Li, J.; Zhang, X.; Song, J.; Zeng, X. Research on Composite Braking Control Strategy of Four-Wheel-Drive Electric Vehicles with Multiple Motors Based on Braking Energy Recovery Optimization. IEEE Access 2023, 11, 110151–110163. [Google Scholar] [CrossRef]
- Tong, X.; Wang, Y.; Guan, Y.; Tian, S.; Wu, T. Layered Control Strategy of Brake-by-Wire Based on Residual Collision Time. J. Jiangsu Univ. (Nat. Sci. Ed.) 2025, 46, 28–35. [Google Scholar] [CrossRef]
- Fu, X.; Xiao, S.; Xu, C. Parallel Compound Braking Strategy of Vehicle Driven by Wheel Motor. J. Jiangsu Univ. (Nat. Sci. Ed.) 2025, 46, 9–17. [Google Scholar] [CrossRef]
- Tang, Z.; Zhang, H.; Li, H.; Li, Y.; Ding, Z.; Chen, J. Developments of Crawler Steering Gearbox for Combine Harvester Straight Forward and Steering in Situ. Int. J. Agric. Biol. Eng. 2020, 13, 120–126. [Google Scholar] [CrossRef]
- Luo, Y.; Wei, L.; Xu, L.; Zhang, Q.; Liu, J.; Cai, Q.; Zhang, W. Stereo-Vision-Based Multi-Crop Harvesting Edge Detection for Precise Automatic Steering of Combine Harvester. Biosyst. Eng. 2022, 215, 115–128. [Google Scholar] [CrossRef]
- Chen, T.; Xu, L.; Ahn, H.S.; Lu, E.; Liu, Y.; Xu, R. Evaluation of Headland Turning Types of Adjacent Parallel Paths for Combine Harvesters. Biosyst. Eng. 2023, 233, 93–113. [Google Scholar] [CrossRef]
- Liu, G.; Zhang, H.; Zhang, D.; Shen, Y.; Wang, Z. Path Tracking and Anti-Rollover Control of High Gap Four-Wheel Independent Drive Sprayer. J. Jiangsu Univ. (Nat. Sci. Ed.) 2023, 44, 657–664. [Google Scholar] [CrossRef]
- Li, J.; Nie, Z.; Chen, Y.; Ge, D.; Li, M. Development of Boom Posture Adjustment and Control System for Wide Spray Boom. Agriculture 2023, 13, 2162. [Google Scholar] [CrossRef]
- Chen, S.; Zhou, Y.; Tang, Z.; Lu, S. Modal Vibration Response of Rice Combine Harvester Frame under Multi-Source Excitation. Biosyst. Eng. 2020, 194, 177–195. [Google Scholar] [CrossRef]
- Xu, L.; Chai, X.; Gao, Z.; Li, Y.; Wang, Y. Experimental Study on Driver Seat Vibration Characteristics of Crawler-Type Combine Harvester. Int. J. Agric. Biol. Eng. 2019, 12, 90–97. [Google Scholar] [CrossRef]
- Xue, W.; Zhang, C. Variable Universe Fuzzy PID Control for Vehicle Active Suspension Based on Genetic Algorithm. J. Jiangsu Univ. (Nat. Sci. Ed.) 2024, 45, 8–15. [Google Scholar] [CrossRef]
- Vivas-Lopez, C.A.; Tudon-Martinez, J.C.; Hernandez-Alcantara, D.; Morales-Menendez, R. Global Chassis Control System Using Suspension, Steering, and Braking Subsystems. Math. Probl. Eng. 2015, 2015, 263424. [Google Scholar] [CrossRef]
- Zhao, H.; Lu, X.; Chen, H.; Liu, Q.; Gao, B. Coordinated Attitude Control of Longitudinal, Lateral and Vertical Tyre Forces for Electric Vehicles Based on Model Predictive Control. IEEE Trans. Veh. Technol. 2022, 71, 2550–2559. [Google Scholar] [CrossRef]
- Shi, X.; Wang, H.; Chen, L.; Sun, X.; Yang, C.; Cai, Y. Robust Path Tracking Control of Distributed Driving Six-Wheel Steering Commercial Vehicle Based on Coupled Active Disturbance Rejection. IEEE Trans. Veh. Technol. 2023, 72, 13940–13952. [Google Scholar] [CrossRef]
- Mazzilli, V. Integrated Chassis Control: Classification, Analysis and Future Trends. Annu. Rev. Control 2021, 51, 172–205. [Google Scholar] [CrossRef]
- Tang, C.; Khajepour, A. Wheel Modules with Distributed Controllers: A Multi-Agent Approach to Vehicular Control. IEEE Trans. Veh. Technol. 2020, 69, 10879–10888. [Google Scholar] [CrossRef]
- Schilke, N.A.; Fruechte, R.D.; Boustany, N.M.; Karmel, A.M.; Repa, B.S.; Rillings, J.H. Integrated Vehicle Control. In Proceedings of the International Congress on Transportation Electronics, San Francisco, CA, USA, 1–3 May 1989; IEEE: Dearborn, MI, USA, 1988; pp. 97–106. [Google Scholar]
- Guo, J.; Dai, Z.; Liu, M.; Xie, Z.; Jiang, Y.; Yang, H.; Xie, D. Distributed Drive Electric Vehicle Handling Stability Coordination Control Framework Based on Adaptive Model Predictive Control. Sensors 2024, 24, 4811. [Google Scholar] [CrossRef]
- Lee, K.; Seol, J. Development of Integrated Chassis Control of Semi-Active Suspension with Differential Brake for Vehicle Lateral Stability. World Electr. Veh. J. 2025, 16, 91. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, L.; Cai, Y.; Sun, X.; Wang, H. Adaptive Coordinated Control Strategy for Autonomous Vehicles Based on Four-Wheel Steering. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2025, 239, 548–563. [Google Scholar] [CrossRef]
- Gordon, T.; Howell, M.; Brandao, F. Integrated Control Methodologies for Road Vehicles. Veh. Syst. Dyn. 2003, 40, 157–190. [Google Scholar] [CrossRef]
- Chokor, A.; Talj, R.; Doumiati, M.; Hamdan, A.; Charara, A. A Comparison between a Centralised Multilayer LPV/∞ and a Decentralised Multilayer Sliding Mode Control Architectures for Vehicle’s Global Chassis Control. Int. J. Control 2022, 95, 303–318. [Google Scholar] [CrossRef]
- Liang, J.; Lu, Y.; Yin, G.; Fang, Z.; Zhuang, W.; Ren, Y.; Xu, L.; Li, Y. A Distributed Integrated Control Architecture of AFS and DYC Based on MAS for Distributed Drive Electric Vehicles. IEEE Trans. Veh. Technol. 2021, 70, 5565–5577. [Google Scholar] [CrossRef]
- Fan, X.; Chen, M.; Huang, Z.; Yu, X. A Review of Integrated Control Technologies for Four In-Wheel Motor Drive Electric Vehicle Chassis. J Braz. Soc. Mech. Sci. Eng. 2025, 47, 89. [Google Scholar] [CrossRef]
- Li, Z.; Chen, H.; Liu, H.; Wang, P.; Gong, X. Integrated Longitudinal and Lateral Vehicle Stability Control for Extreme Conditions with Safety Dynamic Requirements Analysis. IEEE Trans. Intell. Transport. Syst. 2022, 23, 19285–19298. [Google Scholar] [CrossRef]
- Cui, L.; Chakraborty, S.; Ozbay, K.; Jiang, Z.-P. Data-Driven Combined Longitudinal and Lateral Control for the Car Following Problem. IEEE Trans. Contr. Syst. Technol. 2025, 33, 991–1005. [Google Scholar] [CrossRef]
- Shi, X.; Wang, H.; Cai, Y.; Sun, X.; Chen, L.; Yang, C. Two-Stage Auxiliary Drifting Path Tracking Control for Distributed Driving Three-Axle Commercial Vehicles. ISA Trans. 2024, 153, 404–419. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, L.; Wang, C.; Wang, M.; Cao, D.; Wang, Z. Integrated Decision Making and Motion Control for Autonomous Emergency Avoidance Based on Driving Primitives Transition. IEEE Trans. Veh. Technol. 2023, 72, 4207–4221. [Google Scholar] [CrossRef]
- Yim, S.; Choi, J.; Yi, K. Coordinated Control of Hybrid 4WD Vehicles for Enhanced Maneuverability and Lateral Stability. IEEE Trans. Veh. Technol. 2012, 61, 1946–1950. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, C.; Guo, D.; Liu, Z.; Zhou, Z.; Wang, Z. Coordinated Steering Control Combining DDAS and AFS for the Front-Wheel-Independent- Drive Electric Vehicles. IEEE Trans. Transp. Electrific. 2024, 10, 6295–6308. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, H.; Zhao, W. A Human-Vehicle Game Stability Control Strategy Considering Drivers’ Steering Characteristics. IEEE Trans. Intell. Transport. Syst. 2021, 22, 7306–7316. [Google Scholar] [CrossRef]
- Cao, W.; Zhu, Z.; Nan, J.; Zhang, X.; Zou, Y.; Cui, Y. Combined LKA and DYC Control for Electric Vehicle with a Domain-Centralized E/E Architecture Based on Software-Defined Networking. IEEE Trans. Transp. Electrific. 2024, 10, 5439–5450. [Google Scholar] [CrossRef]
- Tavernini, D.; Vacca, F.; Metzler, M.; Savitski, D.; Ivanov, V.; Gruber, P.; Hartavi, A.E.; Dhaens, M.; Sorniotti, A. An Explicit Nonlinear Model Predictive ABS Controller for Electro-Hydraulic Braking Systems. IEEE Trans. Ind. Electron. 2020, 67, 3990–4001. [Google Scholar] [CrossRef]
- Liu, S.; Zhang, L.; Zhang, J.; Liu, X.; Wang, J. Traction Control for Electric Vehicles with Dual-Mode Coupling Drive System on Split Ramps. IEEE Trans. Transp. Electrific. 2024, 10, 2632–2642. [Google Scholar] [CrossRef]
- Hajiloo, R.; Khajepour, A.; Kasaiezadeh, A.; Chen, S.-K.; Litkouhi, B. A Model Predictive Control of Electronic Limited Slip Differential and Differential Braking for Improving Vehicle Yaw Stability. IEEE Trans. Control Syst. Technol. 2023, 31, 797–808. [Google Scholar] [CrossRef]
- Xu, T.; Fan, W.; Sun, Y.; Ji, X.; Liu, Y. Differential Steering Control Based on CNF and ADRC Techniques for Distributed-Drive Articulated Heavy Vehicles. IEEE Trans. Veh. Technol. 2024, 73, 6429–6442. [Google Scholar] [CrossRef]
- Yang, X.; Wang, Z.; Peng, W. Coordinated Control of AFS and DYC for Vehicle Handling and Stability Based on Optimal Guaranteed Cost Theory. Veh. Syst. Dyn. 2009, 47, 57–79. [Google Scholar] [CrossRef]
- Liu, J.; Wang, Y.; Zhang, Z.; Li, T. Robust Adaptive Backstepping Sliding Mode Attitude Control of Quadrotor UAV Based on RBF Network. J. Jiangsu Univ. (Nat. Sci. Ed.) 2025, 46, 36–42. [Google Scholar] [CrossRef]
- Huang, Y.; Zhuang, D. Vehicle Longitudinal Control Based on Disturbance Observer and Terminal Sliding Mode. J. Jiangsu Univ. (Nat. Sci. Ed.) 2024, 45, 513–520. [Google Scholar] [CrossRef]
- Ataei, M.; Khajepour, A.; Jeon, S. Model Predictive Control for Integrated Lateral Stability, Traction/Braking Control, and Rollover Prevention of Electric Vehicles. Veh. Syst. Dyn. 2020, 58, 49–73. [Google Scholar] [CrossRef]
- Guo, P.; Yu, L. Trajectory Tracking Control of Driverless Vehicle Based on Road Adaptive Model Predictive Control. J. Jiangsu Univ. (Nat. Sci. Ed.) 2023, 44, 270–275. [Google Scholar] [CrossRef]
- Liu, W.; Khajepour, A.; He, H.; Wang, H.; Huang, Y. Integrated Torque Vectoring Control for a Three-Axle Electric Bus Based on Holistic Cornering Control Method. IEEE Trans. Veh. Technol. 2018, 67, 2921–2933. [Google Scholar] [CrossRef]
- Zhang, N.; Wang, J.; Li, Z.; Li, S.; Ding, H. Multi-Agent-Based Coordinated Control of ABS and AFS for Distributed Drive Electric Vehicles. Energies 2022, 15, 1919. [Google Scholar] [CrossRef]
- Chen, W.; Shi, Z. Consensus Algorithm of Apron Multi-Agent Networks Based on Self-Triggered Impulsive Pinning Control. J. Jiangsu Univ. (Nat. Sci. Ed.) 2023, 44, 194–199. [Google Scholar] [CrossRef]
- Lu, E.; Xue, J.; Chen, T.; Jiang, S. Robust Trajectory Tracking Control of an Autonomous Tractor-Trailer Considering Model Parameter Uncertainties and Disturbances. Agriculture 2023, 13, 869. [Google Scholar] [CrossRef]
- Liu, H.; Yan, S.; Shen, Y.; Li, C.; Zhang, Y.; Hussain, F. Model Predictive Control System Based on Direct Yaw Moment Control for 4WID Self-Steering Agriculture Vehicle. Int. J. Agric. Biol. Eng. 2021, 14, 175–181. [Google Scholar] [CrossRef]
- Zhou, H.; Jia, F.; Jing, H.; Liu, Z.; Guvenc, L. Coordinated Longitudinal and Lateral Motion Control for Four Wheel Independent Motor-Drive Electric Vehicle. IEEE Trans. Veh. Technol. 2018, 67, 3782–3790. [Google Scholar] [CrossRef]
- Li, Y.; Cai, Y.; Sun, X.; Chen, L.; Lian, Y. Distributed Cooperative Control of Autonomous Vehicle Chassis Based on Multiagent Theory. IEEE Trans. Transp. Electrific. 2025, 11, 5324–5336. [Google Scholar] [CrossRef]
- Gheisarnejad, M.; Mirzavand, G.; Ardeshiri, R.R.; Andresen, B.; Khooban, M.H. Adaptive Speed Control of Electric Vehicles Based on Multi-Agent Fuzzy Q-Learning. IEEE Trans. Emerg. Top. Comput. Intell. 2023, 7, 102–110. [Google Scholar] [CrossRef]
- Liang, J.; Li, Y.; Yin, G.; Xu, L.; Lu, Y.; Feng, J.; Shen, T.; Cai, G. A MAS-Based Hierarchical Architecture for the Cooperation Control of Connected and Automated Vehicles. IEEE Trans. Veh. Technol. 2023, 72, 1559–1573. [Google Scholar] [CrossRef]
- Zhang, N.; Wang, J.; Li, Z.; Xu, N.; Ding, H.; Zhang, Z.; Guo, K.; Xu, H. Coordinated Optimal Control of AFS and DYC for Four-Wheel Independent Drive Electric Vehicles Based on MAS Model. Sensors 2023, 23, 3505. [Google Scholar] [CrossRef]
- Cai, Y.; Li, Y.; Lian, Y.; Chen, L.; Zhong, Y.; Sun, X.; Yuan, C. Cooperative Control of Coupled Multiagent System of Autonomous Vehicle Chassis Based on Co-DMPC. IEEE Trans. Transp. Electrific. 2025, 11, 1875–1890. [Google Scholar] [CrossRef]
- Aouadj, N.; Hartani, K.; Fatiha, M. New Integrated Vehicle Dynamics Control System Based on the Coordination of Active Front Steering, Direct Yaw Control, and Electric Differential for Improvements in Vehicle Handling and Stability. SAE Int. J. Veh. Dyn. Stab. NVH 2020, 4, 119–133. [Google Scholar] [CrossRef]
- Yakub, F.; Mori, Y. Enhancing Path Following Control Performance of Autonomous Ground Vehicle through Coordinated Approach under Disturbance Effect. IEEJ Trans. Electron. Inf. Syst. 2015, 135, 102–110. [Google Scholar] [CrossRef]
- Ding, N.; Taheri, S. An Adaptive Integrated Algorithm for Active Front Steering and Direct Yaw Moment Control Based on Direct Lyapunov Method. Veh. Syst. Dyn. 2010, 48, 1193–1213. [Google Scholar] [CrossRef]
- Di Cairano, S.; Tseng, H.E.; Bernardini, D.; Bemporad, A. Vehicle Yaw Stability Control by Coordinated Active Front Steering and Differential Braking in the Tire Sideslip Angles Domain. IEEE Trans. Control Syst. Technol. 2013, 21, 1236–1248. [Google Scholar] [CrossRef]
- Qiao, Y.; Chen, X.; Yin, D. Coordinated Control for the Trajectory Tracking of Four-Wheel Independent Drive–Four-Wheel Independent Steering Electric Vehicles Based on the Extension Dynamic Stability Domain. Actuators 2024, 13, 77. [Google Scholar] [CrossRef]
- Vignati, M.; Sabbioni, E. A Cooperative Control Strategy for Yaw Rate and Sideslip Angle Control Combining Torque Vectoring with Rear Wheel Steering. Veh. Syst. Dyn. 2022, 60, 1668–1701. [Google Scholar] [CrossRef]
- Lelkó, A.; Németh, B.; Gáspár, P. Reinforcement Learning-Based Robust Vehicle Control for Autonomous Vehicle Trajectory Tracking. Eng. Proc. 2024, 79, 30. [Google Scholar]
- Yang, S.; Geng, C. A Longitudinal/Lateral Coupled Neural Network Model Predictive Controller for Path Tracking of Self-Driving Vehicle. IEEE Access 2023, 11, 117121–117136. [Google Scholar] [CrossRef]
- Shen, X.; Yu, F. Investigation on Integrated Vehicle Chassis Control Based on Vertical and Lateral Tyre Behaviour Correlativity. Veh. Syst. Dyn. 2006, 44, 506–519. [Google Scholar] [CrossRef]
- Liang, J.; Lu, Y.; Pi, D.; Yin, G.; Zhuang, W.; Wang, F.; Feng, J.; Zhou, C. A Decentralized Cooperative Control Framework for Active Steering and Active Suspension: Multi-Agent Approach. IEEE Trans. Transp. Electrific. 2022, 8, 1414–1429. [Google Scholar] [CrossRef]
- Li, Y.; Cai, Y.; Sun, X.; Wang, H.; Chen, L.; Lian, Y.; Dong, Z. Distributed Modeling and Scenario-Driven Extension Hybrid-DMPC Coordinated Control of Autonomous Vehicle Chassis. IEEE Trans. Intell. Transport. Syst. 2025, 26, 7186–7196. [Google Scholar] [CrossRef]
- Cheng, S.; Li, L.; Liu, C.-Z.; Wu, X.; Fang, S.-N.; Yong, J.-W. Robust LMI-Based H-Infinite Controller Integrating AFS and DYC of Autonomous Vehicles with Parametric Uncertainties. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 6901–6910. [Google Scholar] [CrossRef]
- Chang, X.-H.; Liu, Y. Quantized Output Feedback Control of AFS for Electric Vehicles with Transmission Delay and Data Dropouts. IEEE Trans. Intell. Transport. Syst. 2022, 23, 16026–16037. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, L.; Wang, R.; Xu, X.; Shen, Y.; Liu, Y. Modeling and Test on Height Adjustment System of Electrically-Controlled Air Suspension for Agricultural Vehicles. Int. J. Agric. Biol. Eng. 2016, 9, 40–47. [Google Scholar]
- Cui, L.; Mao, H.; Xue, X.; Ding, S.; Qiao, B. Design Optimization and Test for a Pendulum Suspension of the Crop Sprayer Boom in Dynamic Conditions Based on a Six DOF Motion Simulator. Int. J. Agric. Biol. Eng. 2018, 11, 76–85. [Google Scholar] [CrossRef]
- Cui, L.; Xue, X.; Le, F.; Mao, H.; Ding, S. Design and Experiment of Electro Hydraulic Active Suspension for Controlling the Rolling Motion of Spray Boom. Int. J. Agric. Biol. Eng. 2019, 12, 72–81. [Google Scholar] [CrossRef]
- Wu, J.; Zhou, H.; Liu, Z.; Gu, M. Ride Comfort Optimization via Speed Planning and Preview Semi-Active Suspension Control for Autonomous Vehicles on Uneven Roads. IEEE Trans. Veh. Technol. 2020, 69, 8343–8355. [Google Scholar] [CrossRef]
- Liu, C.; Chen, L.; Yang, X.; Zhang, X.; Yang, Y. General Theory of Skyhook Control and Its Application to Semi-Active Suspension Control Strategy Design. IEEE Access 2019, 7, 101552–101560. [Google Scholar] [CrossRef]
- Canale, M.; Milanese, M.; Novara, C. Semi-Active Suspension Control Using “Fast” Model-Predictive Techniques. IEEE Trans. Control Syst. Technol. 2006, 14, 1034–1046. [Google Scholar] [CrossRef]
- Qin, W.; Liu, F.; Yin, H.; Huang, J. Constraint-Based Adaptive Robust Control for Active Suspension Systems Under the Sky-Hook Model. IEEE Trans. Ind. Electron. 2022, 69, 5152–5164. [Google Scholar] [CrossRef]
- Jin, X.; Wang, J.; He, X.; Yan, Z.; Xu, L.; Wei, C.; Yin, G. Improving Vibration Performance of Electric Vehicles Based on In-Wheel Motor-Active Suspension System via Robust Finite Frequency Control. IEEE Trans. Intell. Transport. Syst. 2023, 24, 1631–1643. [Google Scholar] [CrossRef]
- Manna, S.; Mani, G.; Ghildiyal, S.; Stonier, A.A.; Peter, G.; Ganji, V.; Murugesan, S. Ant Colony Optimization Tuned Closed-Loop Optimal Control Intended for Vehicle Active Suspension System. IEEE Access 2022, 10, 53735–53745. [Google Scholar] [CrossRef]
- Li, J.; Shang, Z.; Li, R.; Cui, B. Adaptive Sliding Mode Path Tracking Control of Unmanned Rice Transplanter. Agriculture 2022, 12, 1225. [Google Scholar] [CrossRef]
- Sun, J.; Wang, Z.; Ding, S.; Xia, J.; Xing, G. Adaptive Disturbance Observer-Based Fixed Time Nonsingular Terminal Sliding Mode Control for Path-Tracking of Unmanned Agricultural Tractors. Biosyst. Eng. 2024, 246, 96–109. [Google Scholar] [CrossRef]
- Wang, R.; Zhang, K.; Ding, R.; Jiang, Y.; Jiang, Y. A Novel Hydraulic Interconnection Design and Sliding Mode Synchronization Control of Leveling System for Crawler Work Machine. Agriculture 2025, 15, 137. [Google Scholar] [CrossRef]
- Zhang, Z.; Chen, C.; Li, H.; Xia, H. Design and Evaluation of a Control System for the Fertigation Device. J. ASABE 2022, 65, 1293–1302. [Google Scholar] [CrossRef]
- Chen, J.; Ning, X.; Li, Y.; Yang, G.; Wu, P.; Chen, S. A Fuzzy Control Strategy for the Forward Speed of a Combine Harvester Based on KDD. Appl. Eng. Agric. 2017, 33, 15–22. [Google Scholar] [CrossRef]
- Chen, H.; Gong, M.-D.; Zhao, D.-X.; Liu, W.-B.; Jia, G.-Y. Coordination Control of Multi-Axis Steering and Active Suspension System for High-Mobility Emergency Rescue Vehicles. Mathematics 2022, 10, 3562. [Google Scholar] [CrossRef]
- Hu, J.; Liu, Y.; Xiao, F.; Lin, Z.; Deng, C. Coordinated Control of Active Suspension and DYC for Four-Wheel Independent Drive Electric Vehicles Based on Stability. Appl. Sci. 2022, 12, 11768. [Google Scholar] [CrossRef]
- March, C.; Shim, T. Integrated Control of Suspension and Front Steering to Enhance Vehicle Handling. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2007, 221, 377–391. [Google Scholar] [CrossRef]
- Xiao, F.; Hu, J.; Jia, M.; Zhu, P.; Deng, C. A Novel Integrated Control Framework of AFS, ASS, and DYC Based on Ideal Roll Angle to Improve Vehicle Stability. Adv. Eng. Inform. 2022, 54, 101764. [Google Scholar] [CrossRef]
- Xu, F.; Zhou, C.; Liu, X.; Wang, J. GRNN Inverse System Based Decoupling Control Strategy for Active Front Steering and Hydro-Pneumatic Suspension Systems of Emergency Rescue Vehicle. Mech. Syst. Signal Process. 2022, 167, 108595. [Google Scholar] [CrossRef]
- Qin, Y.; Zhao, Z.; Wang, Z.; Li, G. Study of Longitudinal–Vertical Dynamics for In-Wheel Motor-Driven Electric Vehicles. Automot. Innov. 2021, 4, 227–237. [Google Scholar] [CrossRef]
- Bayar, K. Shortening the Braking Distance of a Passenger Car through Coordinated Control of Brakes and Active Suspension. Mühendis Ve Makina 2021, 62, 372–394. [Google Scholar] [CrossRef]
- Valdivieso-Soto, A.; Galluzzi, R.; Tramacere, E.; Cespi, R.; Castellanos Molina, L.M. Lyapunov-Based Pitch Control for Electric Vehicles Using In-Wheel Motors. Vehicles 2025, 7, 37. [Google Scholar] [CrossRef]
- Zhang, J.; Yang, Y.; Hu, M.; Yang, Z.; Fu, C. Longitudinal–Vertical Comprehensive Control for Four-Wheel Drive Pure Electric Vehicle Considering Energy Recovery and Ride Comfort. Energy 2021, 236, 121417. [Google Scholar] [CrossRef]
- Meng, X.; Kong, L.; Ding, R.; Liu, W.; Wang, R. Research on Active Suspension Control Based on Vehicle Speed Control Under Transient Pavement Excitation. World Electr. Veh. J. 2025, 16, 232. [Google Scholar] [CrossRef]
- Wang, W.-Y.; Chen, M.-C.; Su, S.-F. Hierarchical T—S Fuzzy-Neural Control of Anti-Lock Braking System and Active Suspension in a Vehicle. Automatica 2012, 48, 1698–1706. [Google Scholar] [CrossRef]
- Wang, H.; Hu, Y.; Pi, D.; Wang, J.; Wang, W.; Yan, Y.; Zhao, J.; Wong, P.K.; Xue, P.; Tao, S. Research on Longitudinal-Vertical Coordinated Recovery Drive Control for Corner-Modular Distributed Drive Vehicles. IEEE Trans. Transp. Electrific. 2025, 11, 7979–7990. [Google Scholar] [CrossRef]
- Huang, C.; Hong, J.; Bei, S.; Li, B. Coordinated Control of Vehicle Chassis Energy Flow and Dynamics Based on Hierarchical Hierarchy. Dyn. Syst. Appl. 2021, 30, 700–717. [Google Scholar] [CrossRef]
- Zhao, J.; Wong, P.K.; Ma, X.; Xie, Z. Chassis Integrated Control for Active Suspension, Active Front Steering and Direct Yaw Moment Systems Using Hierarchical Strategy. Veh. Syst. Dyn. 2017, 55, 72–103. [Google Scholar] [CrossRef]
- Chen, J.; Liu, Y.; Liu, R.; Xiao, F.; Huang, J. Integrated Control of Braking-Yaw-Roll Stability under Steering-Braking Conditions. Sci. Rep. 2023, 13, 21110. [Google Scholar] [CrossRef]
- Fergani, S.; Sename, O.; Dugard, L. An Integrated Vehicle Dynamic Controller. IEEE Trans. Veh. Technol. 2016, 65, 1880–1889. [Google Scholar] [CrossRef]
- Zhao, S.; Wu, X.; Lu, H. Adaptive Mode-Switching Coordinated Control Based on Stability Domain for Longitudinal-Lateral-Vertical Decoupling X-By-Wire Electric Vehicles. In Proceedings of the 2024 IEEE Vehicle Power and Propulsion Conference (VPPC), Washington, DC, USA, 7–10 October 2024; IEEE: New York, NY, USA, 2024; pp. 1–7. [Google Scholar]
- Chen, X.; Wang, M.; Wang, W. Unified Chassis Control of Electric Vehicles Considering Wheel Vertical Vibrations. Sensors 2021, 21, 3931. [Google Scholar] [CrossRef]
- Zhao, W.; Yang, Z.; Wang, C. Multi-Objective Optimization of Chassis Integrated System for Electric Wheel Vehicle. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 7–17. [Google Scholar] [CrossRef]
- Jia, J.; Yue, Y.; Sun, A.; Liu, X. Coordinated Control Strategy for Longitudinal, Lateral, and Vertical Motions of Distributed Electric Vehicles Based on Model Predictive Control. In Proceedings of the WCX SAE World Congress Experience, Detroit, MI, USA, 1 April 2025; p. 8300. [Google Scholar]
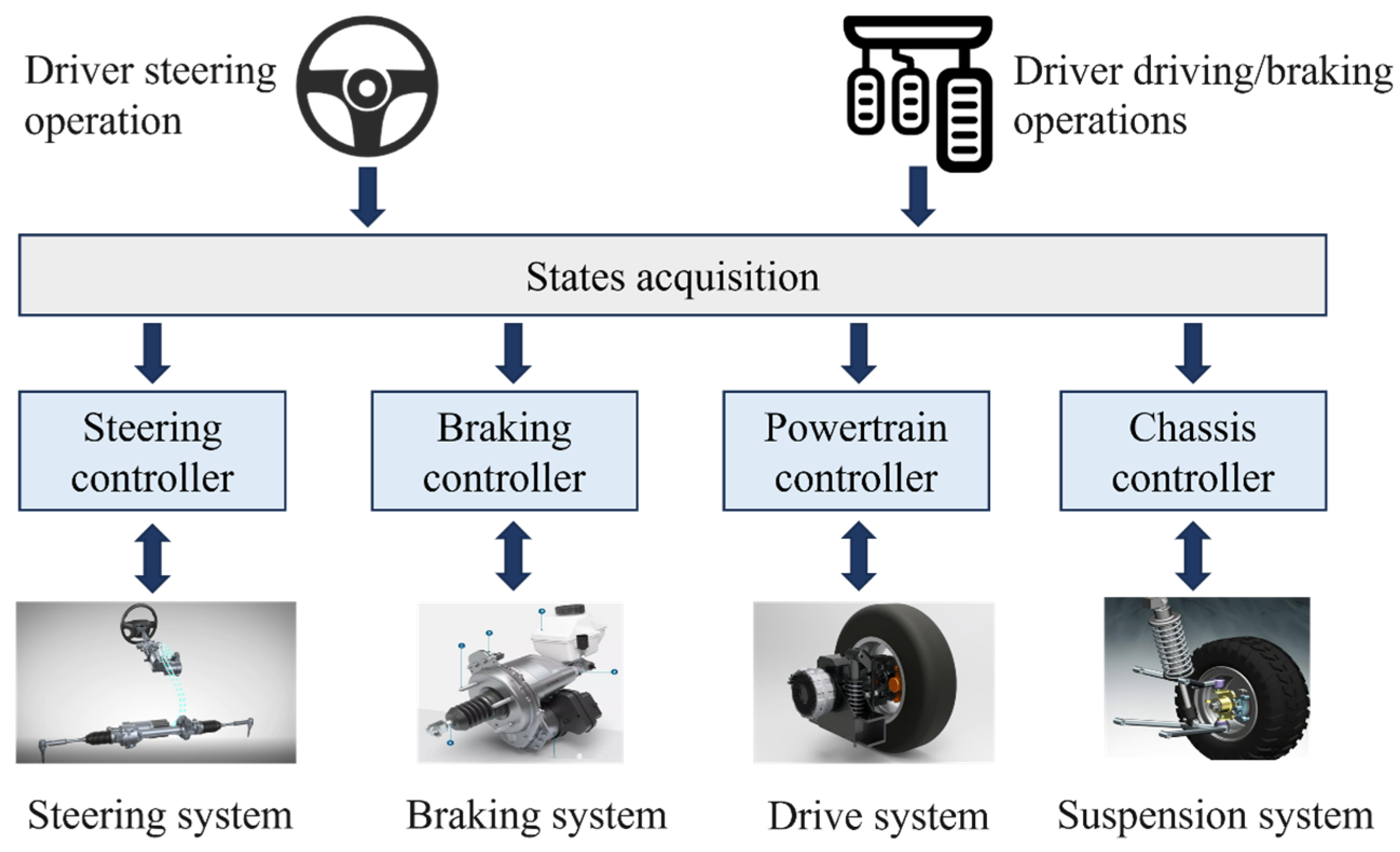



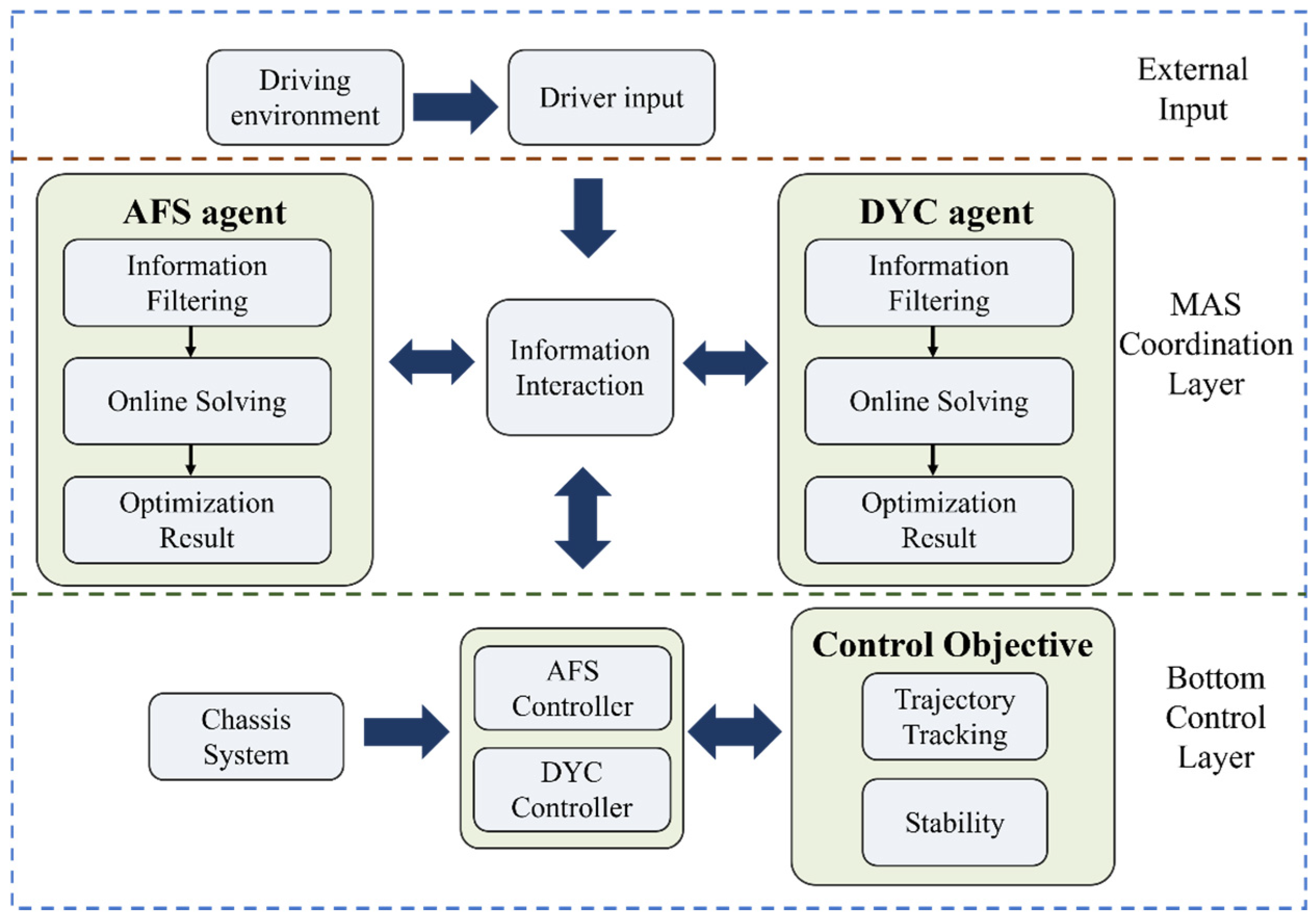




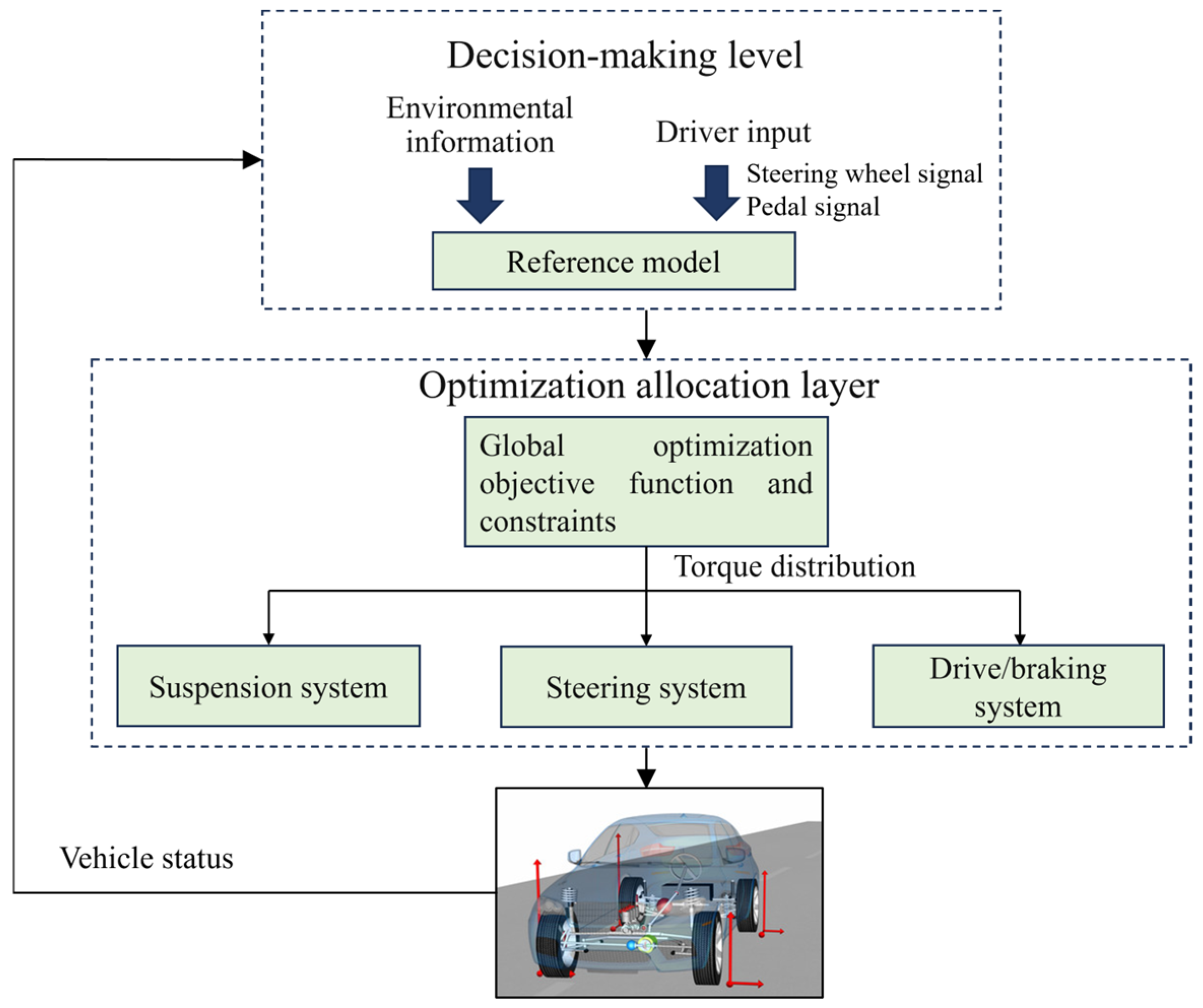
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).