4.2. Solution Algorithm Design
WOA is characterized by its advantages of few algorithmic parameters and robust global search capabilities [
39]; however, conventional WOA implementations are fundamentally incompatible with multimodal transportation route optimization problems due to their exclusive applicability to continuous optimization domains, coupled with inherent limitations in local search efficacy that predispose the algorithm to premature convergence in combinatorial search spaces. This study proposes a multi-strategy enhanced whale optimization algorithm (IWOA) employing discrete encoding mechanisms, featuring three principal innovations: First, Sobol sequences are implemented during population initialization to ensure low-discrepancy solution distribution, significantly reducing computational overhead in the preliminary optimization phase. Second, the canonical position update mechanism is fundamentally reconceptualized through discrete operator transformations, enabling effective adaptation to combinatorial optimization problems. Third, strategic enhancements, including variable neighborhood search (VNS) operators for local intensification and elitist preservation mechanisms, are integrated to systematically expand the solution space while mitigating local optima entrapment risks. This hybrid design paradigm synergistically balances exploration–exploitation dynamics, thereby improving global convergence properties and solution quality for complex multimodal transportation optimization challenges. The algorithm was implemented using MATLAB R2021a, and its core parameters are explicitly defined as follows: initial population size, maximum iterations, VNS adoption rate, and elitism preservation rate.
The algorithm employs a positive integer-based hybrid encoding strategy, where the core representation integrates both feasible multimodal path
and corresponding transportation mode
information into a unified one-dimensional vector. Specifically, the first n positions of the encoding vector store the sequential node indices along the transportation path, while the subsequent n − 1 positions encode the transportation modes utilized between consecutive node pairs. The mathematical expression and schematic diagram of this encoding method are shown in Equation (46) and
Figure 3, respectively. Numbers denote nodes in the path, and R/H/W represent road transportation, railway transportation, and waterway transportation, respectively.
- (2)
Sobol sequence initialization population
The Sobol sequence, a low-discrepancy sequence demonstrating superior uniformity characteristics in high-dimensional space, systematically addresses the issue of solution clustering through its quasi-random sampling mechanism. By generating solution populations that uniformly cover the search space with minimized dispersion, it fundamentally enhances initialization quality and optimization efficiency. This approach not only substantially mitigates population aggregation during the initialization phase but also achieves comprehensive spatial coverage of the solution domain. Consequently, it establishes favorable initial conditions for global optimization while significantly enhancing the probability of algorithmic convergence to globally optimal solutions through improved exploration–exploitation balance.
- (3)
Whale individual location update
Given the distinctive combinatorial optimization characteristics inherent in multimodal transportation route selection problems, the canonical position update mechanism of the whale optimization algorithm has been fundamentally reconceptualized through discrete state transition operators, as formally presented in Equation (47). This algorithmic adaptation specifically addresses the discrete nature of transportation mode selection and path sequencing decisions, ensuring operational compatibility with the problem’s inherent combinatorial optimization structure.
Within the algorithmic framework, denotes the current iteration count, represents the maximum allowable iterations, while is a stochastically generated vector uniformly distributed within the interval [0, 1], serving as a randomization operator in the position update mechanism. denotes the position-updated whale agent, represents the current whale agent in the solution space, and corresponds to the currently identified optimal whale agent within the evolutionary population.
The
operator in the proposed evolutionary algorithm operates through the following rigorous mechanism: Initially, it identifies common intermediate transshipment node positions
(excluding origin and destination nodes) shared between two parental paths. Subsequently, the algorithm performs reciprocal exchange of both nodal sequences and transportation mode assignments from position
to the destination between whale agents
and
, thereby generating two novel offspring individuals. Crucially, this crossover mechanism is constrained to nodes with transshipment capabilities and is triggered exclusively when the stochastic pairing of encoded whale agents satisfies the prerequisite condition of shared intermediate transshipment nodes, ensuring operational validity and solution feasibility in multimodal transportation networks. This operational mechanism is schematically represented in
Figure 4.
Diverging from the
,
operator imposes a minimum requirement of two crossover points for valid path segment exchange between parental routes. The operational protocol mandates (1) identification of at least two shared nodal positions (excluding origin-destination pairs) between parental encodings and (2) reciprocal exchange of path segments and corresponding transportation mode assignments bounded by these crossover points. Should the cardinality of shared nodes prove insufficient for dual-crossover operations, the algorithm initiates a stochastic path regeneration procedure to ensure offspring feasibility. This constrained crossover mechanism, graphically illustrated in
Figure 4, maintains solution validity through rigorous topological preservation while enhancing genetic diversity through adaptive recombination strategies. This operational mechanism is schematically represented in
Figure 5.
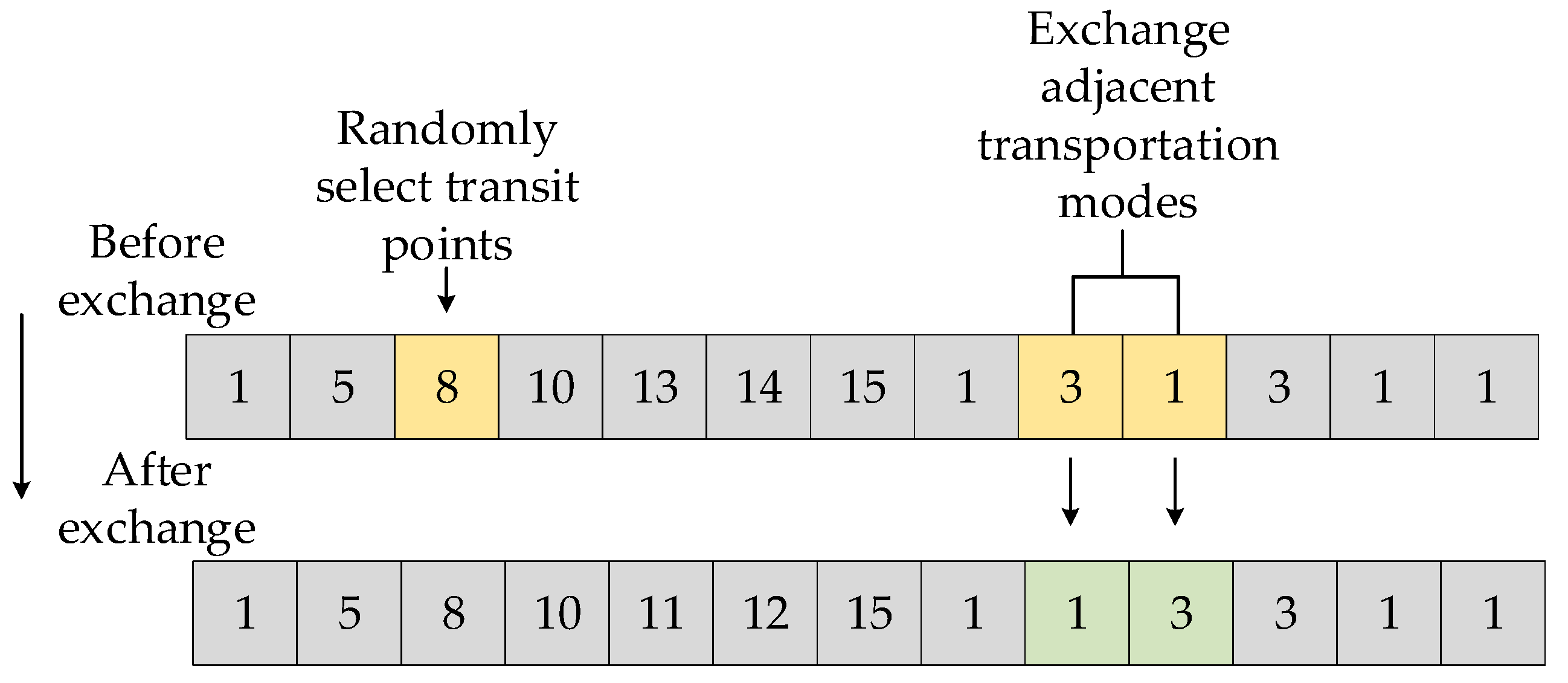
operates by generating perturbed solutions through systematic application of predefined neighborhood operators to incumbent solutions, followed by rigorous validity verification procedures. Within this algorithmic architecture, four distinct neighborhood structures are implemented, with each whale agent stochastically selecting one operator per iteration under a uniform probability distribution across all available neighborhood transformation mechanisms.
The neighborhood search operators comprise four distinct mechanisms: Transport Mode Mutation stochastically selects a path segment and substitutes its current transport mode with an alternative viable option from available modes; Transshipment Node Insertion randomly identifies an insertion position, validates potential intermediate nodes maintaining bidirectional connectivity with adjacent nodes, inserts a qualified transshipment node, and assigns randomized transport modes to newly formed segments; Path Segment Reconfiguration selects a subpath for topological restructuring by exploring alternative nodal sequences and connectivity patterns to discover optimized routing configurations; Intermodal Transition Swap randomly selects a transshipment node and exchanges transport modes between its preceding and succeeding path segments, with operational schematics respectively illustrated in
Figure 6,
Figure 7,
Figure 8 and
Figure 9, demonstrating constrained stochastic perturbations that maintain network feasibility while enhancing solution diversity.
The variable neighborhood search (VNS) algorithm operates as a local search metaheuristic that systematically explores multiple predefined neighborhood structures around incumbent solutions to identify superior candidates, thereby refining selected individuals within the evolutionary population. Through cyclic activation of distinct neighborhood operators, it implements conditional transition logic: successful improvement triggers reversion to the primary neighborhood for intensified search, while exhaustive exploration without progress prompts sequential neighborhood switching. This hierarchical search protocol synergistically enhances solutions initially generated by the whale optimization algorithm’s tripartite position update strategies, enabling comprehensive solution space exploration that mitigates local optima entrapment risks. The mechanism probabilistically elevates global convergence likelihood while improving solution quality metrics through adaptive balance between intensification and diversification across dynamically reconfigured search landscapes.
In summary, the methodological workflow of the IWOA proposed in this study is systematically illustrated in
Figure 10, delineating the synergistic integration of discrete encoding mechanisms, Sobol sequence initialization, hybrid crossover operators, and variable neighborhood search strategies within the algorithmic architecture.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}