1. Introduction
Forest ecosystems constitute a crucial component of global natural resources. As the largest terrestrial carbon pool, they contribute over 60% of terrestrial carbon sinks and play an irreplaceable role in regulating the climate and stabilizing the biosphere [
1]. Tree height serves as a key factor that characterizes the vertical structure of forests. It is also an important indicator for assessing carbon stock, productivity, and ecosystem service functions [
2,
3,
4], as well as for estimating biomass and evaluating forest health [
5,
6]. Therefore, it holds significant importance to acquire tree height information within forest systems in a rapid, real-time, and high-precision manner.
Tree height information is predominantly obtained via two approaches, namely manual ground-based surveys and remote sensing inversion [
7]. Manual survey methods are capable of providing more precise forest data in low-density and sparse forests [
8,
9]. However, it proves challenging to acquire accurate information in forests featuring complex topography, intricate stand structures, and high vegetation coverage. In this study, topography refers to the physical characteristics of the land surface, including elevation, slope, and terrain features, which can significantly influence the accuracy of tree height measurements. Moreover, such surveys typically demand a substantial amount of time and labor [
10]. To address the limitations of manual surveys, remote sensing technology, which boasts the advantages of extensive coverage and high precision, has been extensively utilized in recent years for the collection and monitoring of forest- related data, including that of various tree species [
11,
12]. Light detection and ranging (LiDAR) can be classified into ground-based LiDAR (TLS), airborne laser scanning (ALS), and satellite-borne LiDAR based on different platforms. ALS is capable of acquiring high-precision three-dimensional forest structural information and extracting forest features such as tree heights. Nevertheless, it is constrained by the flight altitude of the aircraft, route planning, and the high cost [
13,
14,
15,
16,
17]. Satellite-borne LiDAR, on the contrary, is characterized by large-scale coverage and all-weather operability. This feature can guarantee the continuity and stability of the data. It also has robust anti-interference capabilities and can penetrate forest vegetation to provide information on the canopy stratification structure, understory vegetation, and the ground surface [
15,
18,
19].
The Ice, Cloud, and Land Elevation Satellite (ICESat-1; 2003–2009) pioneered spaceborne full-waveform altimetry through its Geoscience Laser Altimeter System (GLAS), enabling unprecedented monitoring of polar elevation dynamics across glaciers, ice sheets, and sea ice [
20]. As ICESat-1’s successor, ICESat-2 (launched September 2018) [
21] features the Advanced Terrain Laser Altimeter System (ATLAS), employing photon-counting LiDAR technology with multi-beam micropulses at high repetition rates for three-dimensional along-track feature characterization [
22,
23]. Neuenschwander et al. [
24] conducted accuracy assessments of extracted ground and canopy heights in Finnish forests, while Yu et al. [
25] systematically analyzed influencing factors on ICESat-2’s height estimation accuracy. Their respective studies reported Bias of 0.28
(ground) and −0.21
(canopy), with corresponding RMSE values of 0.96
and 2.50
. Launched in December 2018, the Global Ecosystem Dynamics Investigation (GEDI) [
26] represents the first dedicated satellite LiDAR system for vegetation vertical structure monitoring, featuring superior technical specifications including reduced footprint diameter, enhanced sampling density, and improved resolution/sensitivity compared to conventional spaceborne LiDAR systems. However, its performance remains susceptible to slope, vegetation height, and beam sensitivity factors.
Launched from China’s Taiyuan Satellite Launch Center in August 2022, the Terrestrial Ecosystem Carbon Inventory Satellite (TECIS) represents China’s inaugural quantitative remote sensing satellite dedicated to terrestrial ecosystem monitoring. Equipped with the next-generation Carbon Sinks and Aerosol LiDAR (CASAL) as its primary payload—the nation’s first multi-beam full-waveform LiDAR system—TECIS specializes in the high-precision measurement of carbon stocks, forest resources, and productivity [
27,
28,
29,
30]. The satellite features an advanced payload configuration, including (1) the CASAL with dual-mode vegetation measurement and aerosol detection capabilities (see
Figure 1 for operational schematic); (2) a directional multi-spectral camera (DMC) for spectral characterization; (3) a fluorescence spectral imager (FSI) for assessing vegetation physiological status; and (4) a directional polarization camera (DPC) for atmospheric correction. These payloads work synergistically to form a comprehensive Earth observation system. Pang et al. [
31] validated TECIS’s forest monitoring capability through waveform analysis, demonstrating strong consistency between the satellite’s canopy parameters and the 75th percentile heights from airborne laser scanning (ALS) (random forest model:
,
1.38
).
Table 1 systematically compares the mission-critical parameters of four generations of spaceborne LiDARs-ICESat, ICESat-2, GEDI, and TECIS.
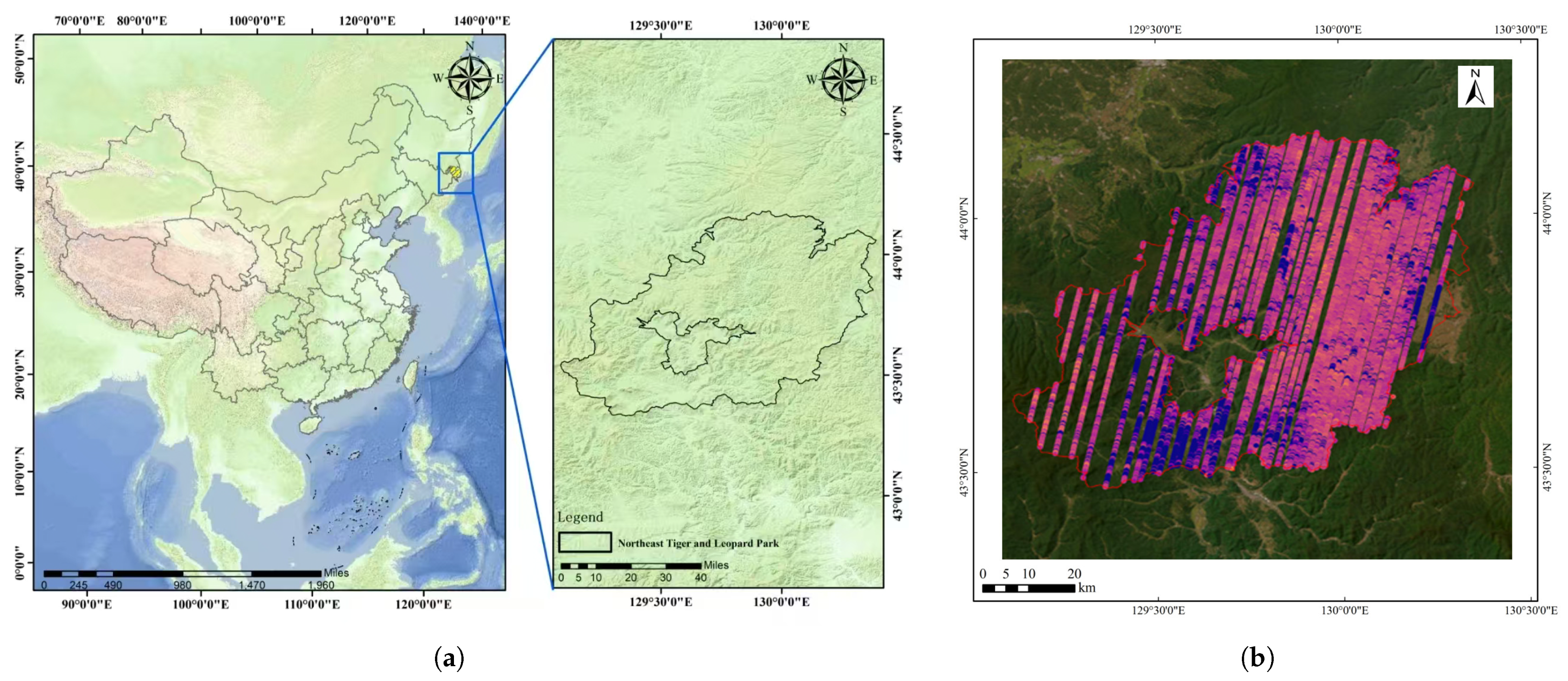
While forest canopy height inversion studies utilizing ICESat/GLAS and GEDI datasets have been extensively documented, research employing laser full-waveform data from domestic terrestrial carbon monitoring satellites remains comparatively limited. Given significant variations in payload hardware specifications, the performance of terrestrial carbon monitoring satellites for forest canopy height retrieval warrants comprehensive investigation. This study employs China’s Northeast Tiger and Leopard National Park as a test site to (1) evaluate the accuracy of CASAL-derived ground and canopy height estimates and (2) establish a methodological foundation for subsequent TECIS applications in forest canopy height and aboveground biomass quantification.
4. Discussion
This study employed an airborne laser scanning (ALS)-derived digital terrain model (DTM) and Hmax as reference data to evaluate the accuracy of the Carbon Sinks and Aerosol LiDAR (CASAL) system in two key areas. First, CASAL’s performance in DTM estimation was assessed across varying slope, vegetation cover, and tree height conditions. Second, its capability in canopy height estimation was examined under different slope, vegetation cover, and forest type scenarios. These analyses provide a comprehensive understanding of CASAL’s accuracy in diverse environmental settings.
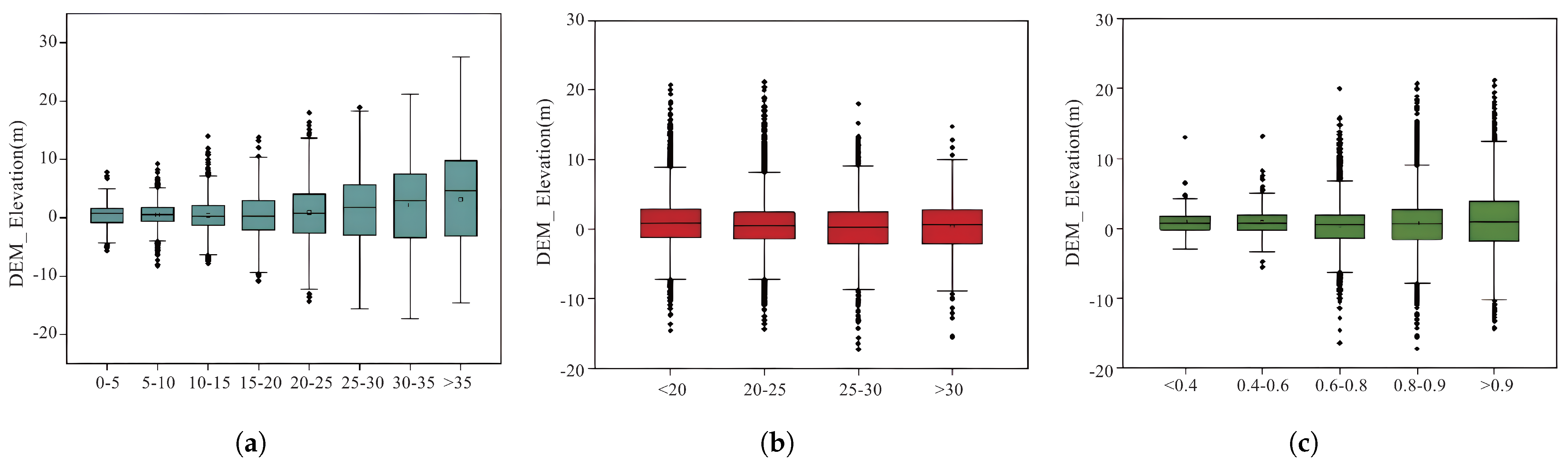
4.1. Digital Terrain Model
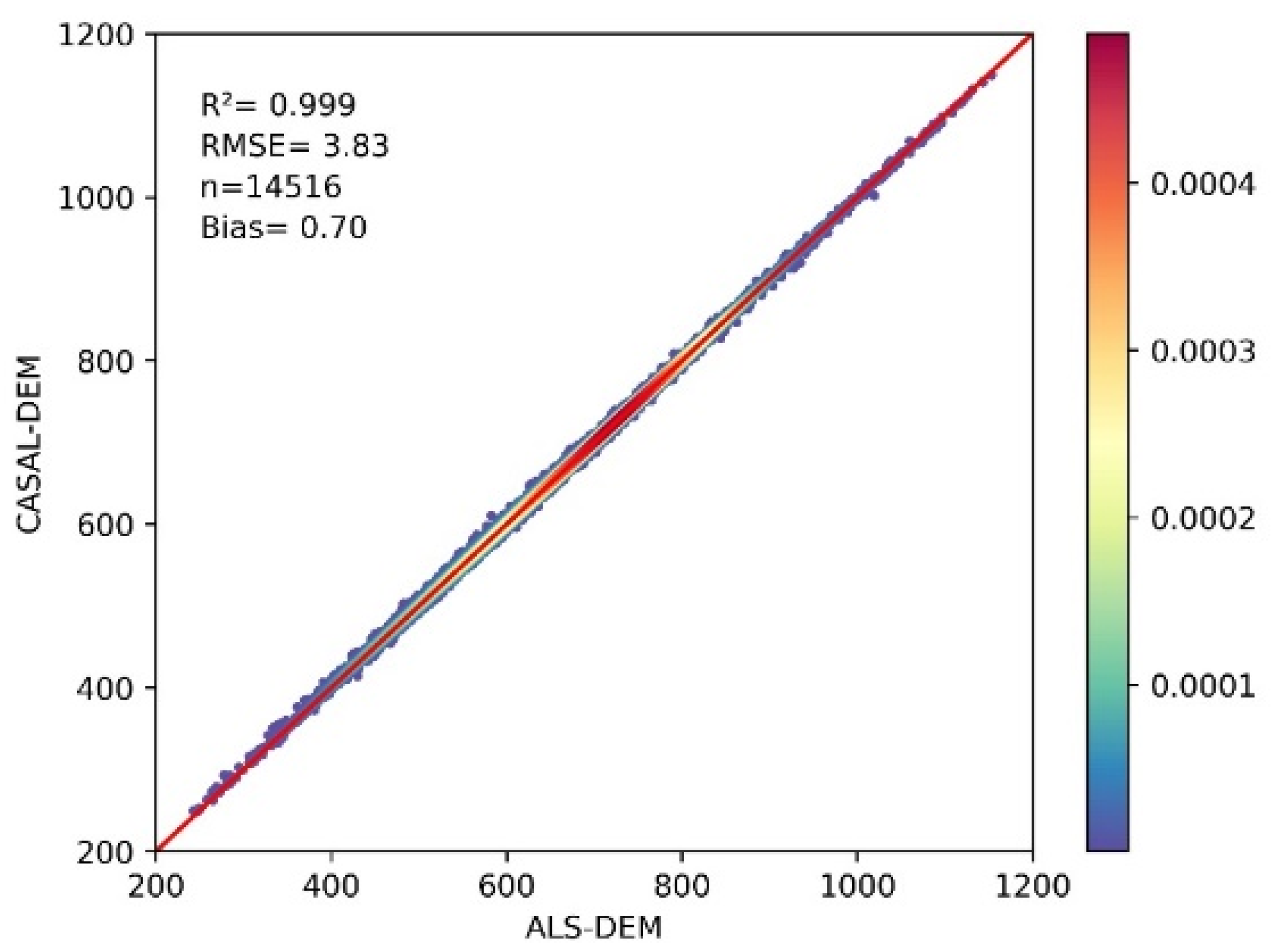
The study results demonstrate an exceptionally strong correlation (
) between CASAL-derived ground elevations and airborne light detection and ranging (LiDAR) DTM products. This high correlation confirms CASAL’s reliability for ground elevation inversion, particularly in flat or low-slope terrain. However, CASAL-DTM accuracy shows greater sensitivity to slope than to vegetation cover or tree height. This phenomenon likely results from reduced laser pulse penetration on steep slopes, increasing terrain inversion errors. Thus, CASAL applications in complex terrain may require correction through integration with additional data sources or algorithms. The median DTM difference (0.57 m) aligns with findings from comparable studies. For instance, Adam et al. [
15] reported GEDI median DTM differences of −0.26 m and 0.18 m in Thuringia, suggesting systematic sensor-specific biases in topographic elevation inversion. Wang et al. [
42] noted significant GEDI DTM variations across land cover and forest types, likely attributable to vegetation-specific laser pulse reflection and penetration characteristics. These findings corroborate previous GEDI topographic accuracy studies, further validating LiDAR data inversion performance variations across land cover types. CASAL-DTM exhibits minor topographic elevation overestimation compared to ALS-DTM, though within a smaller magnitude. Specifically, CASAL-DTM demonstrates lower error metrics than GEDI, with mean square error (RMSE) = 3.83 m, Bias = 0.70 m, median = 0.57 m, and median absolute deviation (MAD) = 2.96 m. These results indicate CASAL’s high accuracy for topographic elevation inversion, particularly in forested regions. Compared to GEDI, CASAL demonstrates more stable elevation inversion performance, potentially due to higher point cloud density and optimized data processing algorithms. Furthermore, the strong agreement between CASAL and ALS-DTM elevation inversions underscores CASAL’s potential for forest terrain monitoring applications.
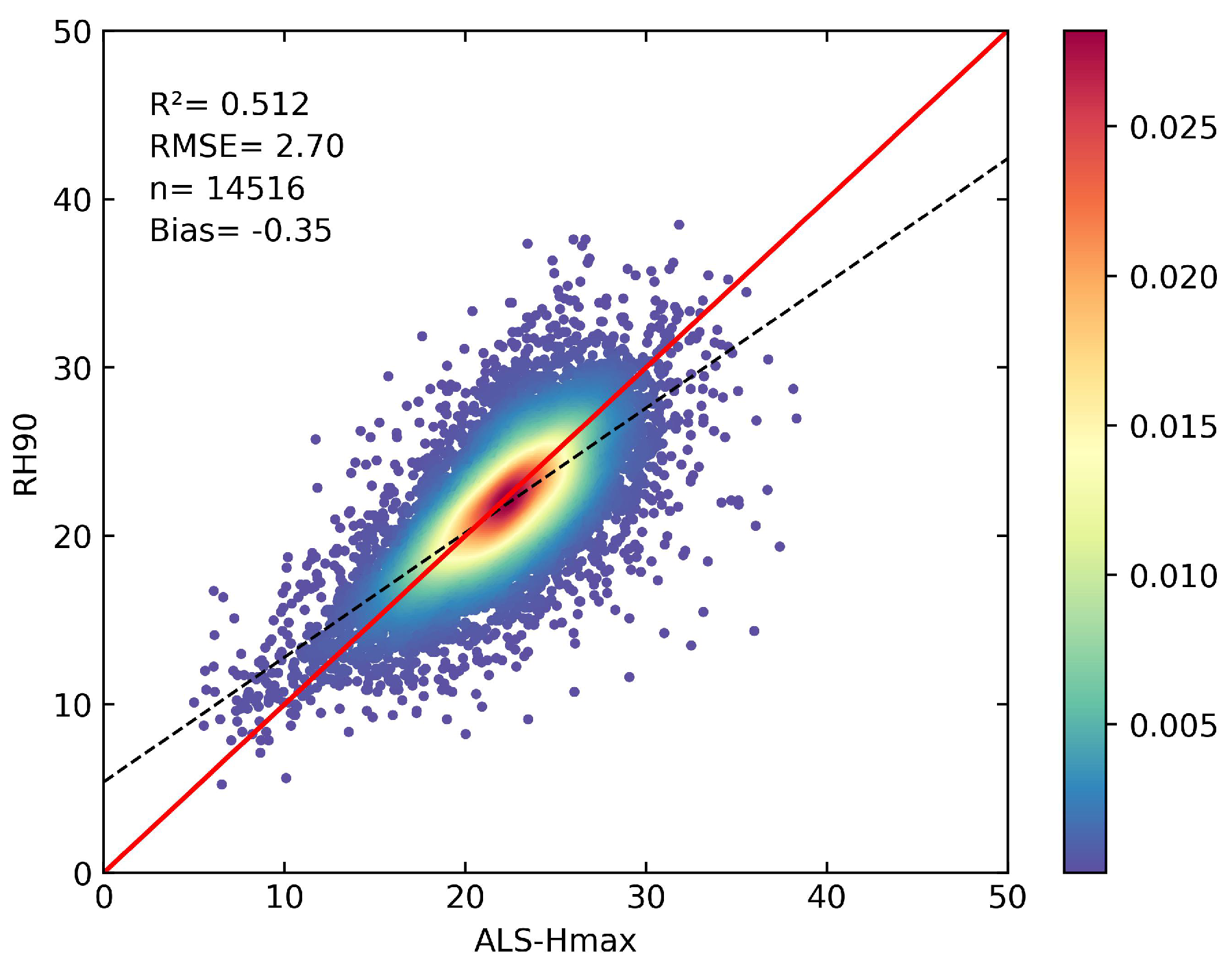
4.2. Canopy Height
Among CASAL-derived relative height (RH) metrics, RH90 exhibited the strongest correlation with ALS-Hmax. This finding contrasts with Potapov and Zhu et al. [
16,
18], who identified GEDI’s RH95 as the optimal indicator of true forest height. This discrepancy likely arises from differences in pulse width between CASAL and GEDI systems. Furthermore, our results diverge from Liu et al.’s [
39] findings. Their research demonstrated that ICESat-2’s RH98 most accurately represented true forest height. This inconsistency may result from temporal discrepancies between CASAL and ALS data acquisitions, which were not considered in our analysis. Additionally, their study incorporated diverse land cover types, potentially influencing results. These findings suggest that optimal height percentiles may vary across satellite systems depending on land cover characteristics.
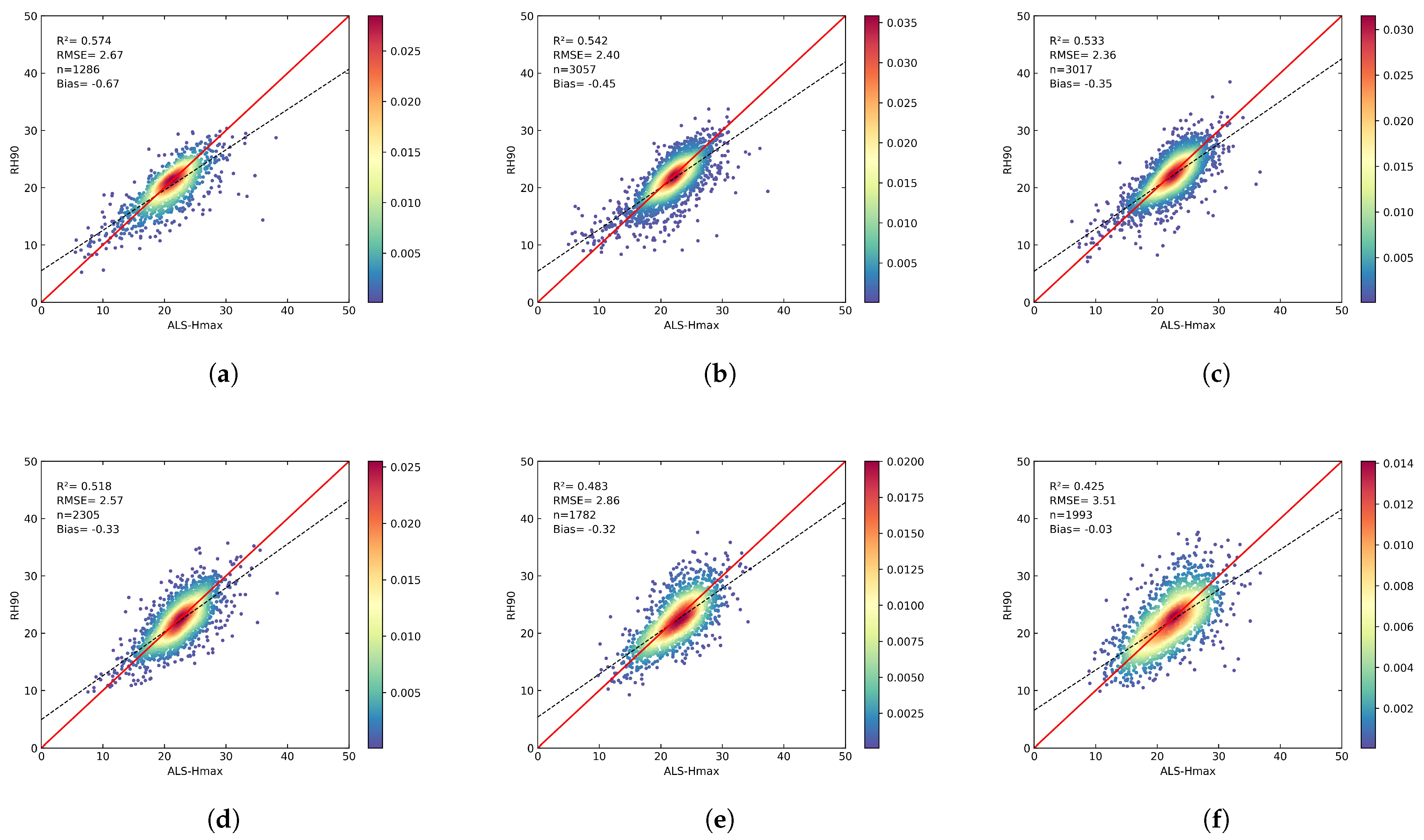
Steep terrain significantly contributes to CASAL waveform broadening and increased overlap between canopy and understory echoes. This broadening effect exacerbates waveform overlap, making CASAL-based canopy height estimation in high-slope areas particularly sensitive to terrain influence, thereby reducing estimation accuracy. Canopy height estimation accuracy (, RMSE) declines with increasing slope. This occurs because waveform decomposition’s last peak reliably references canopy height in flat terrain, whereas slope-induced waveform broadening in non-flat areas reduces accuracy when using the last peak as a reference. As terrain slope increases, last-peak-based canopy height estimation becomes less accurate, explaining the observed inverse relationship between slope and estimation precision.
The forest canopy height estimation accuracy (
and RMSE) in this study surpasses that reported by Chen et al. [
43] for southwestern Quebec using CASAL parameters. This improvement is attributed to winter data collection, when reduced vegetation coverage enables CASAL laser pulses to penetrate forest stands more effectively, yielding precise understory topographic information. Enhanced penetration of CASAL laser pulses through winter canopies facilitates accurate differentiation between canopy and ground peaks, thereby improving canopy height estimation precision.
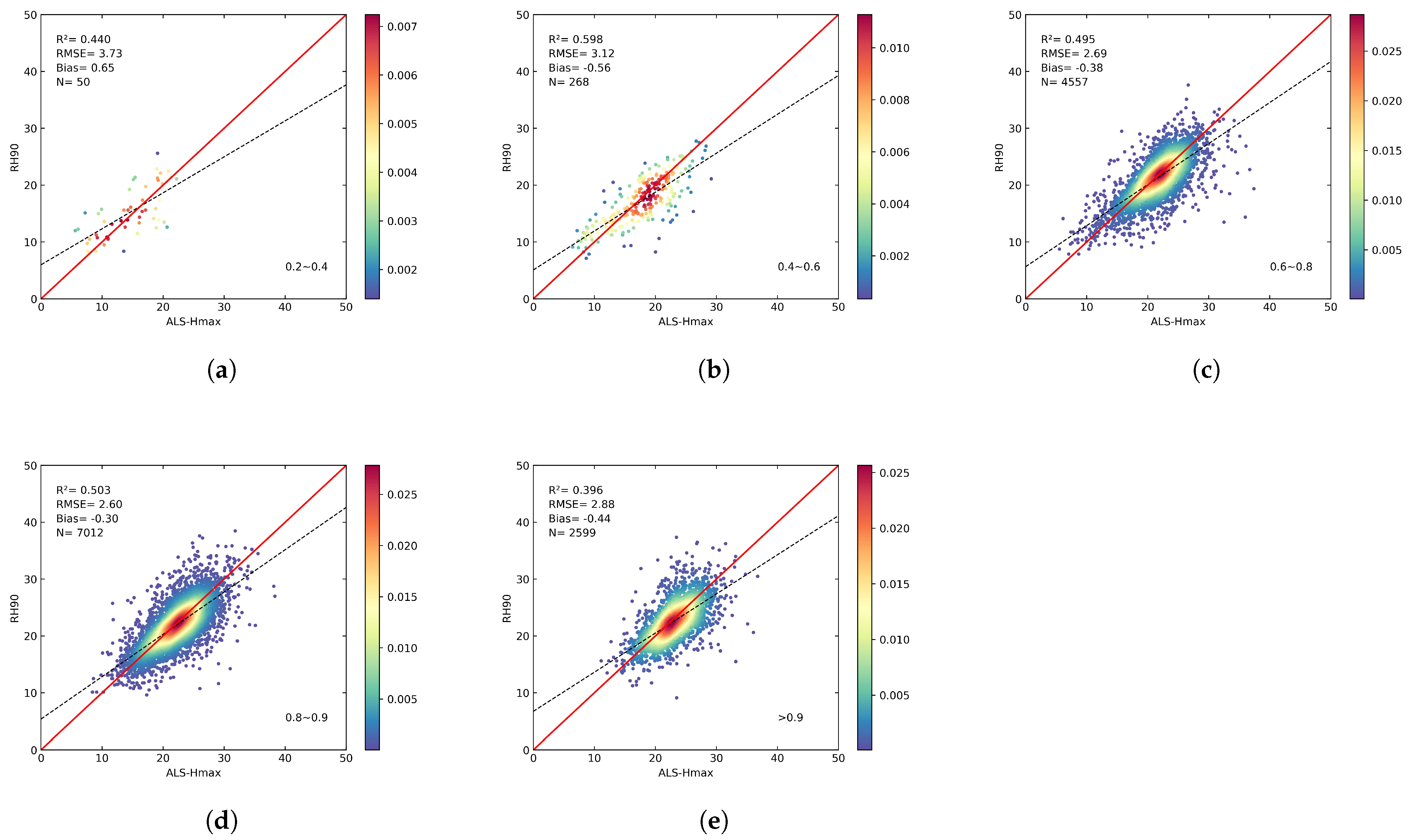
CASAL exhibits maximum canopy height inversion error at vegetation cover , likely due to limited laser pulse penetration through dense, structurally complex canopies, resulting in a misclassification of canopy echoes as ground returns. Conversely, in low-vegetation-cover areas, the highest waveform echo elevation may not correspond to the tallest canopy tree, potentially due to tree dispersion within the 25 m footprint and geolocation errors. The observed discrepancy between highest echo elevation and actual canopy height may result from tree dispersion within the 25 m footprint and geolocation inaccuracies.
CASAL demonstrated optimal accuracy in mixed forests, evidenced by maximum
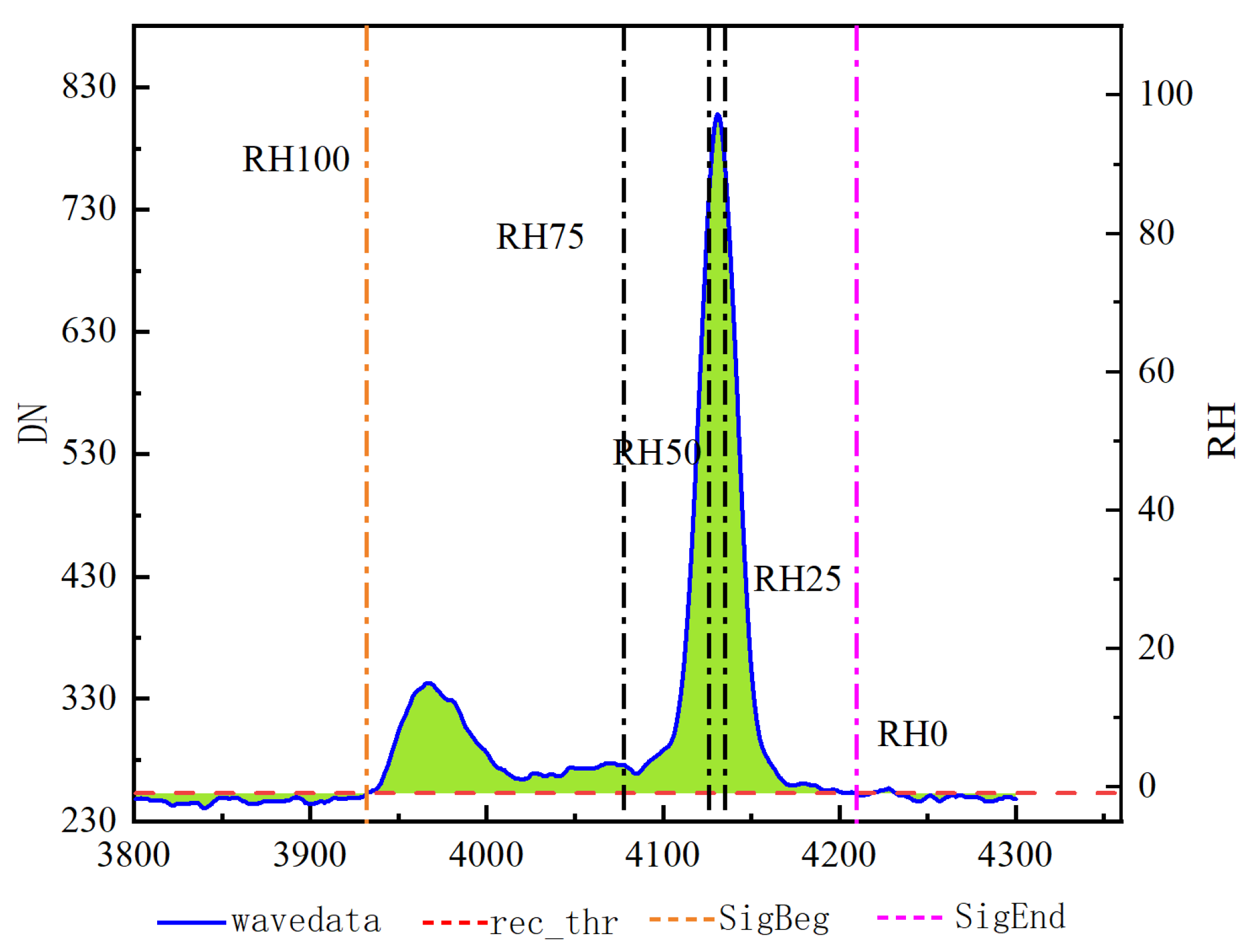
values and minimum RMSE and MAD metrics. Broadleaf forests showed moderate accuracy, whereas coniferous forests exhibited the poorest performance among the three forest types. These performance variations likely stem from structural and canopy complexity differences among forest types, influencing system inversion efficacy.The study area contains extensive mixed and broadleaf forests. During winter leaf-off conditions, CASAL’s laser pulses effectively penetrate the canopy, enabling precise retrieval of subcanopy terrain information. Our findings demonstrate that winter leaf-off conditions in deciduous broadleaf forests significantly enhance the performance of spaceborne LiDAR canopy height retrievals. The improved signal penetration during winter is evidenced by the distinct separation of canopy and ground peaks in waveform data (
Figure 4), enabling a more accurate identification of these features and consequently higher precision in forest canopy height estimation.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}