Bridge Damage Identification Based on Variational Modal Decomposition and Continuous Wavelet Transform Method

Abstract
1. Introduction
2. Bridge Damage Identification Methods
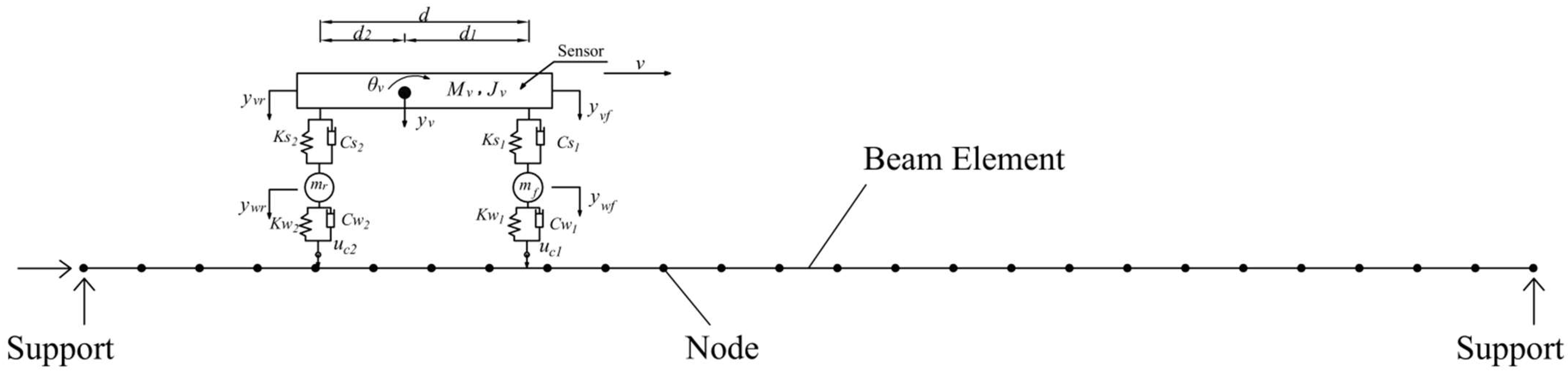
2.1. Vehicle–Bridge Coupling Analysis
Closed-Form Solutions for Contact Point Responses
2.2. Damage Identification Based on Continuous Wavelet Transform
2.2.1. Brief on Continuous Wavelet Transform
2.2.2. Selection of Wavelet Basis Functions and Wavelet Scales
2.2.3. Brief on Variational Modal Decomposition
3. Numerical Verification
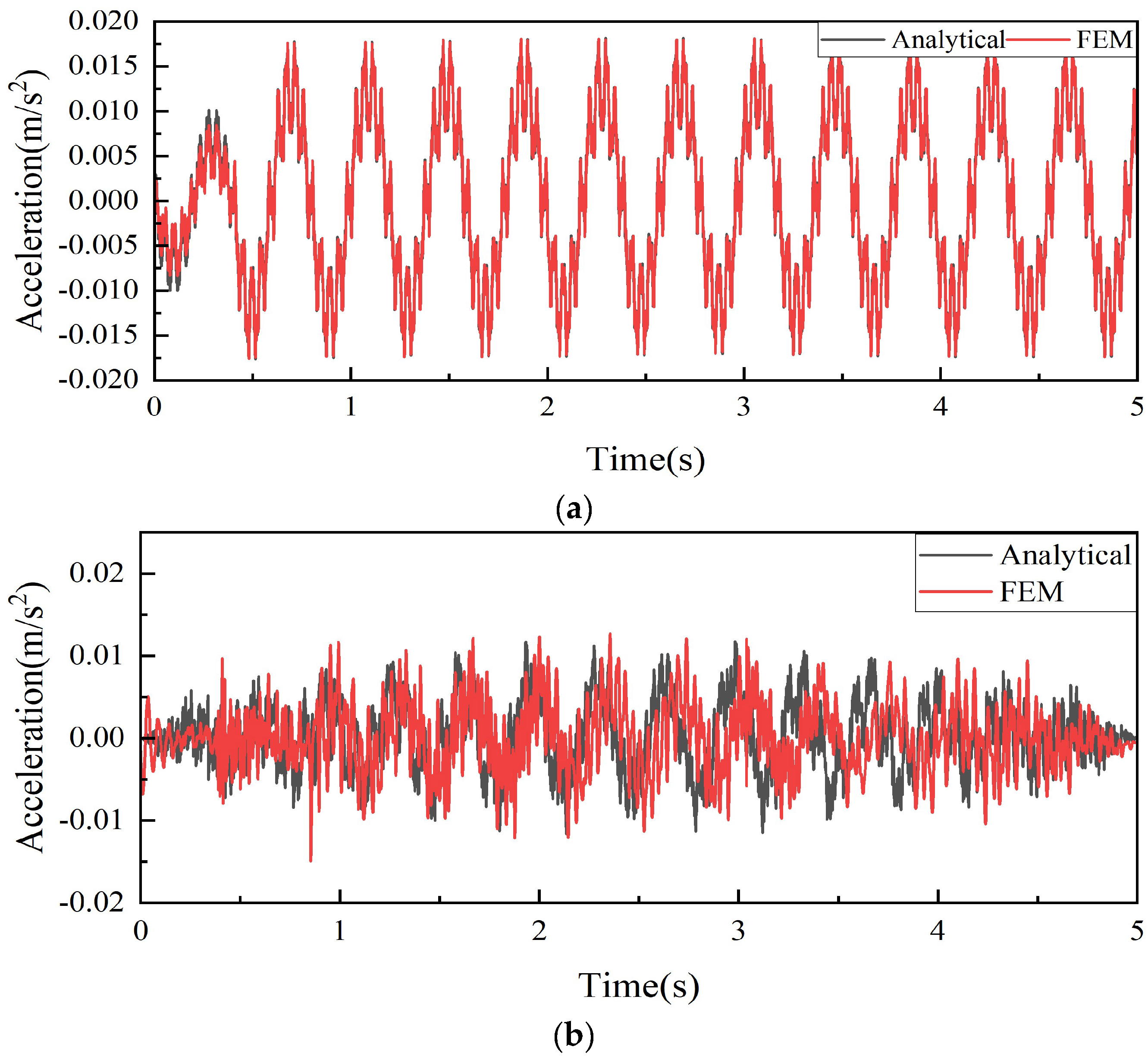
3.1. VBI Design of Simply Supported Bridges
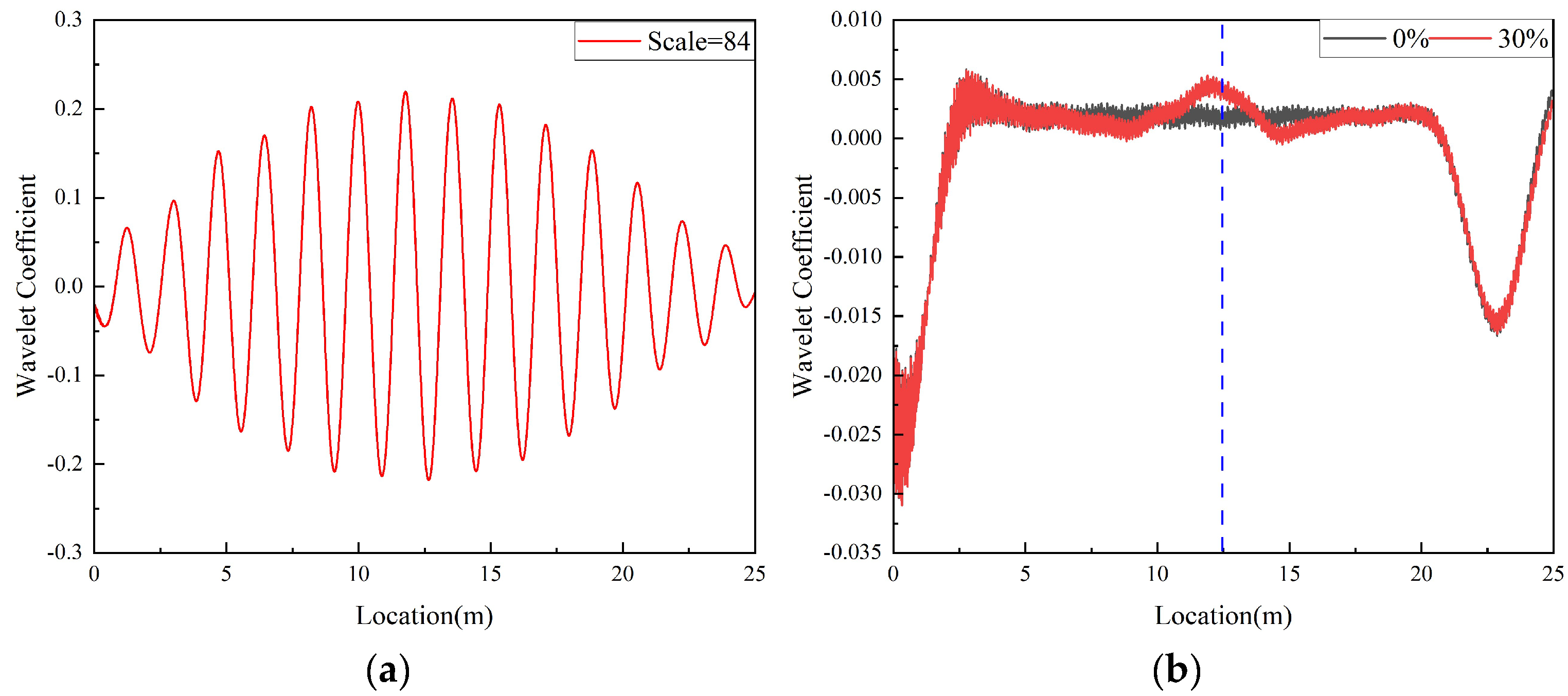
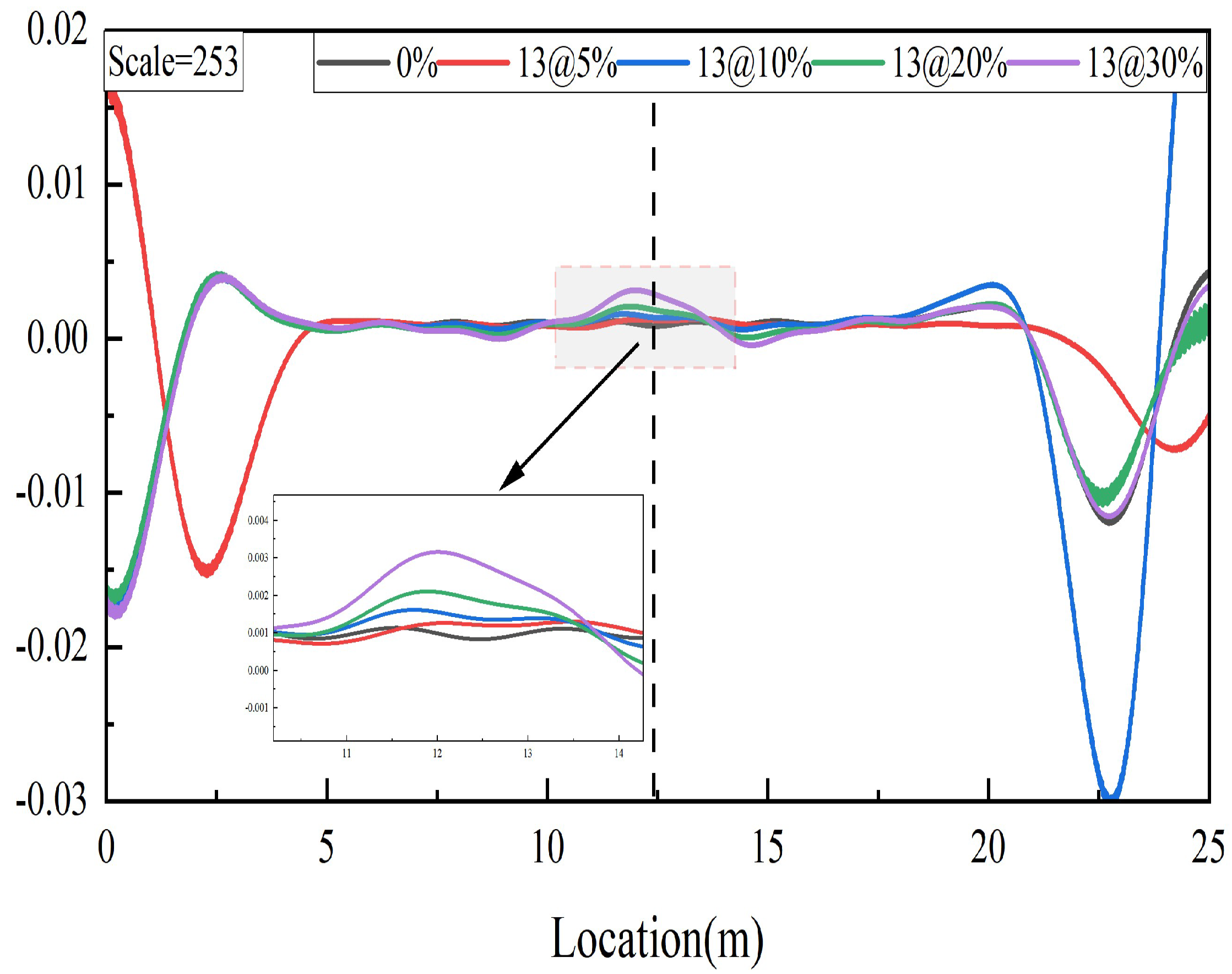
3.2. Damage Identification Based on Continuous Wavelet Transform
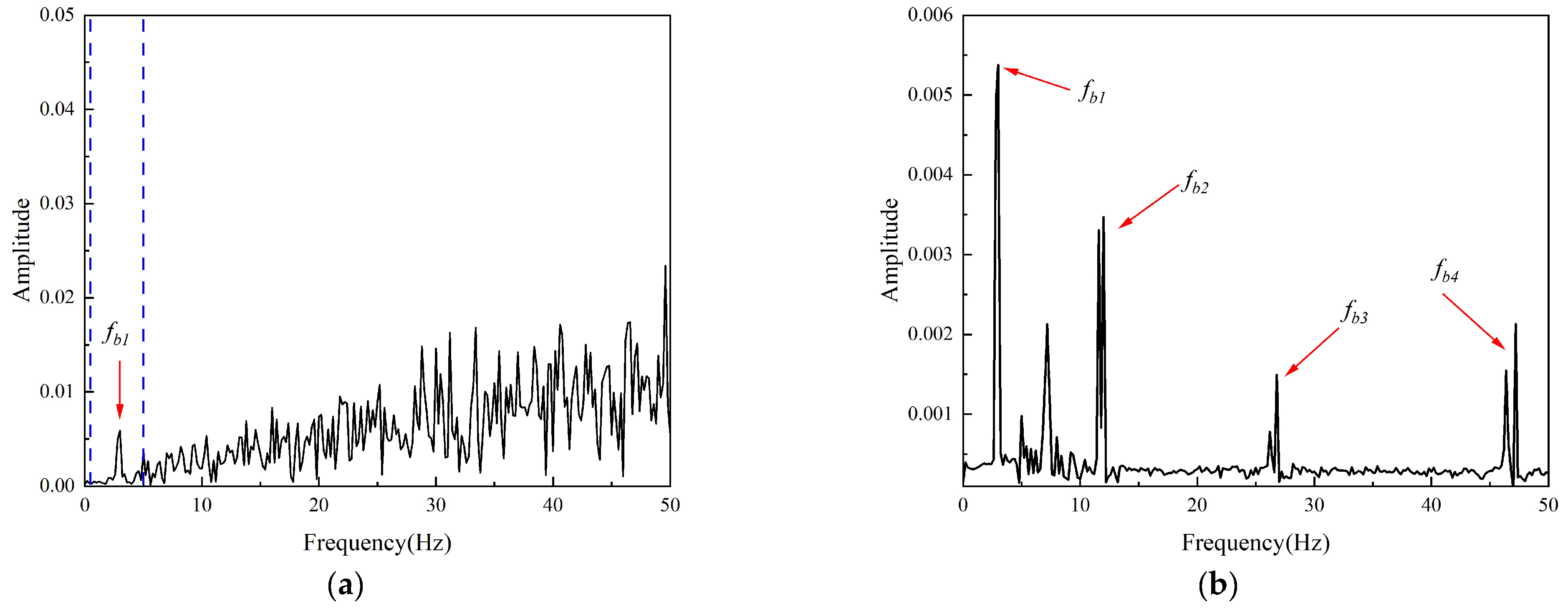
3.3. Damage Identification Based on Variational Modal Decomposition–Continuous Wavelet Transform
- (1)
- The test vehicle drives over the bridge at speed v, and the data are collected by the acceleration sensor on the test vehicle;
- (2)
- Obtain the contact point acceleration response by calculation;
- (3)
- Decompose the contact point acceleration response by variational modal decomposition transformation to obtain a number of IMFs.
- (4)
- Extract the IMFs corresponding to the first-order intrinsic frequency of the bridge, and use continuous wavelet transform for damage identification.
3.4. Multiple Damage Identification
4. Parameter Discussion
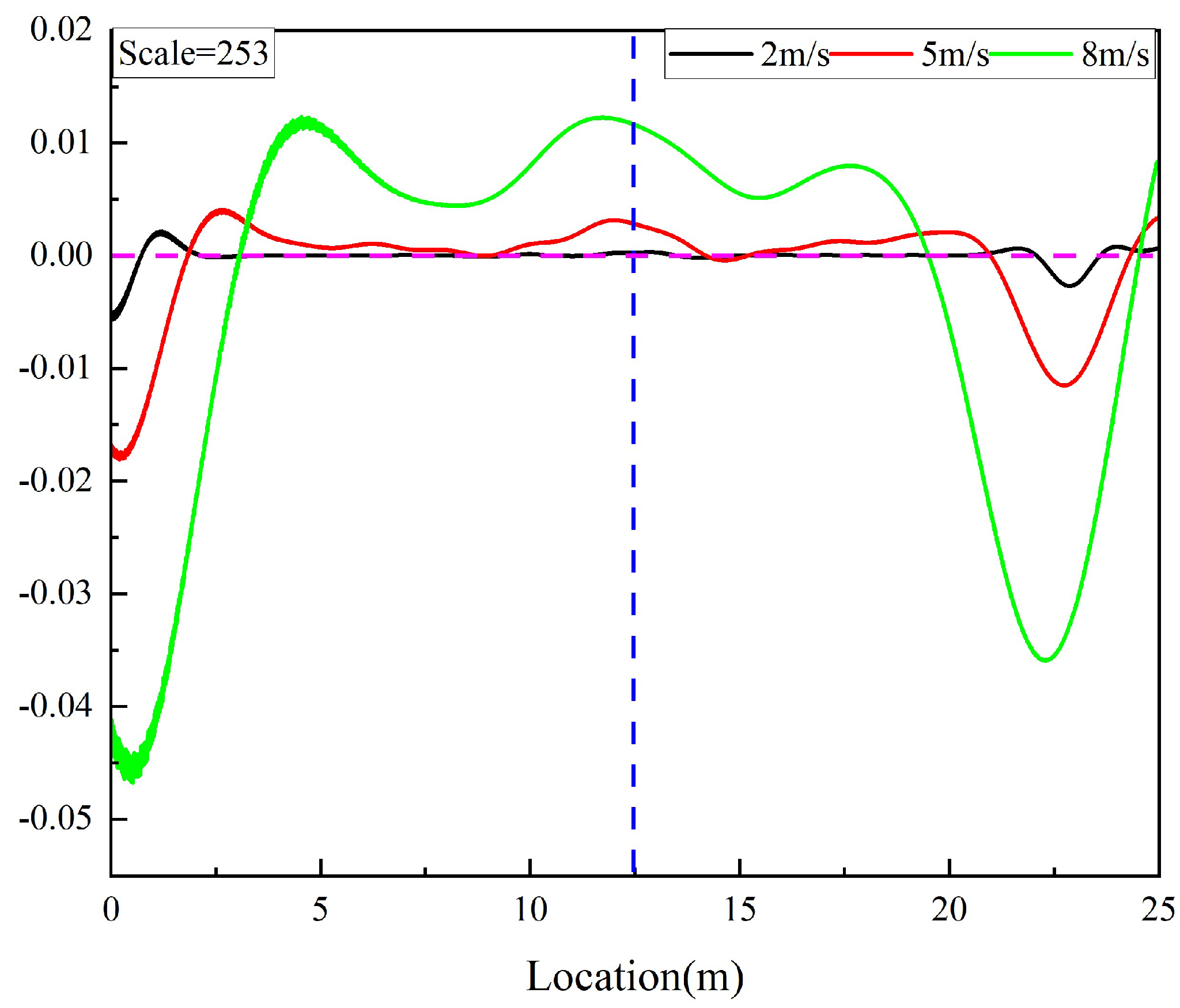
4.1. Effect of Vehicle Speed
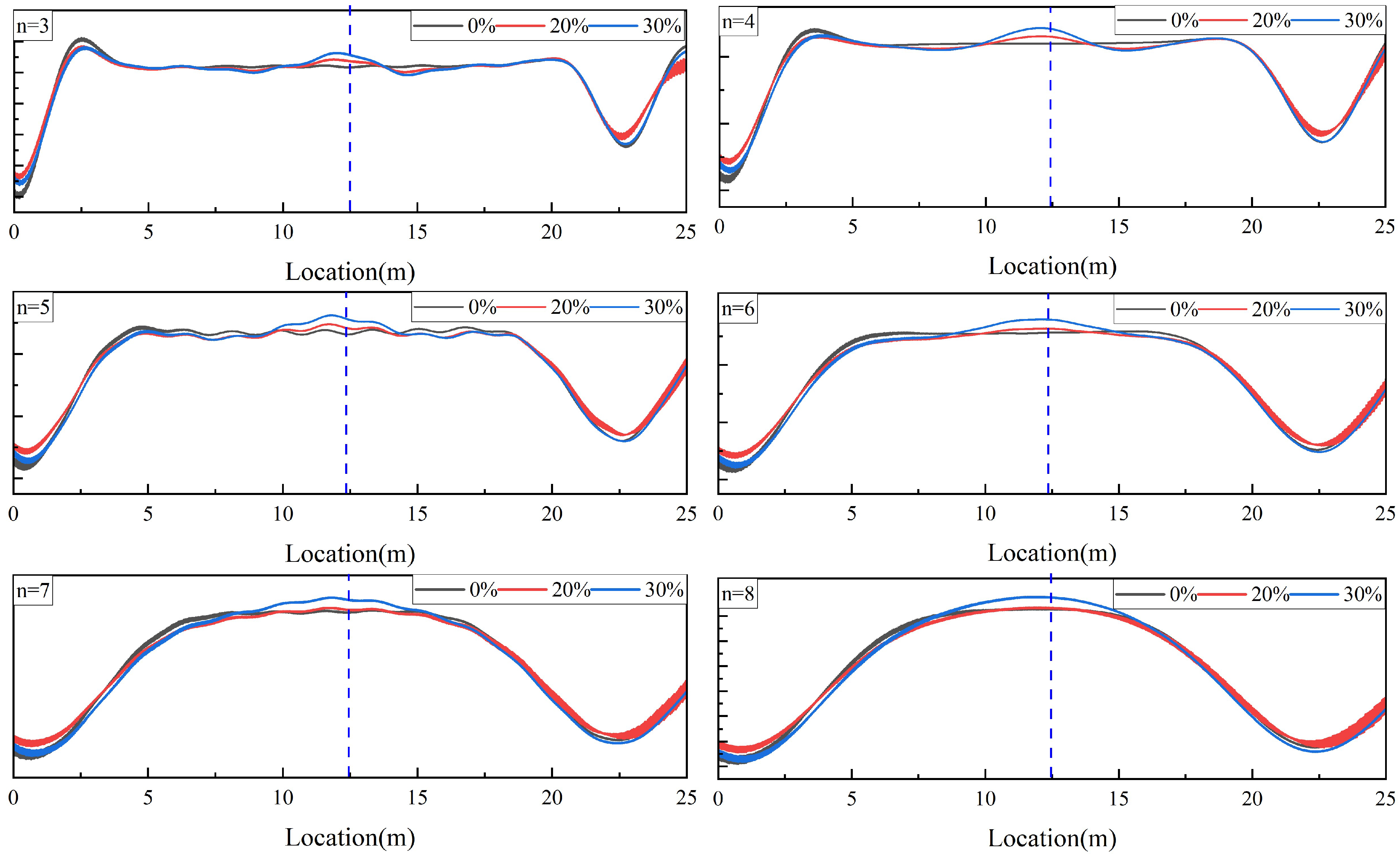
4.2. Effect of Scale Factor
4.3. Effect of Number of Bridge Spans
4.4. Effect of Pavement Roughness
5. Conclusions
- (1)
- The variational mode decomposition technique helps separate different frequency components in the contact point acceleration response, eliminating modal aliasing and spurious frequency issues. This improves the accuracy and stability of damage identification.
- (2)
- Studies show that within a certain range, the effectiveness of damage identification improves with increased vehicle speed. However, bridge deck roughness may affect excessively high speeds, interfering with identification results.
- (3)
- Using the continuous wavelet transform to process the contact point acceleration response can extract bridge damage features effectively. The effective scale factor range of the continuous wavelet transform coefficients extracted by this method is broad, and adjusting the scale factor can further improve the accuracy of damage location identification.
- (4)
- The proposed variational modal decomposition–continuous wavelet transform method is not only applicable for the identification of damage in simply supported beams but also for the identification of damage in continuous beams.
- (5)
- Even when considering road surface roughness, the proposed damage identification method can still accurately identify damage locations, demonstrating its potential for practical application under complex conditions.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ren, W.X.; Zhao, T.; Harik, I.E. Experimental and Analytical Modal Analysis of Steel Arch Bridge. J. Struct. Eng. 2004, 130, 1022–1031. [Google Scholar] [CrossRef]
- Kim, C.W.; Chang, K.C.; Kitauchi, S.; McGetrick, P.J. A field experiment on a steel Gerber-truss bridge for damage detection utilizing vehicle-induced vibrations. Struct. Health Monit. 2016, 15, 421–429. [Google Scholar] [CrossRef]
- Bayissa, W.L.; Haritos, N.; Thelandersson, S. Vibration-based structural damage identification using wavelet transform. Mech. Syst. Signal Process. 2008, 22, 1194–1215. [Google Scholar] [CrossRef]
- Amezquita-Sanchez, J.P.; Adeli, H. Signal Processing Techniques for Vibration-Based Health Monitoring of Smart Structures. Arch. Comput. Methods Eng. State Art Rev. 2016, 23, 1–15. [Google Scholar] [CrossRef]
- Yang, Y.B.; Wang, Z.-L.; Shi, K.; Xu, H.; Wu, Y.T. State-of-the-Art of the Vehicle-Based Methods for Detecting the Various Properties of Highway Bridges and Railway Tracks. Int. J. Struct. Stab. Dyn. 2020, 20, 2041004. [Google Scholar] [CrossRef]
- Yang, Y.B.; Lin, C.W.; Yau, J.D. Extracting bridge frequencies from the dynamic response of a passing vehicle. J. Sound Vib. 2004, 272, 471–493. [Google Scholar] [CrossRef]
- Lin, C.W.; Yang, Y.B. Use of a passing vehicle to scan the fundamental bridge frequencies: An experimental verification. Eng. Struct. 2005, 27, 1865–1878. [Google Scholar] [CrossRef]
- Curadelli, R.O.; Riera, J.D.; Ambrosini, D.; Amani, M.G. Damage detection by means of structural damping identification. Eng. Struct. 2008, 30, 3497–3504. [Google Scholar] [CrossRef]
- Garbowski, T.; Cornaggia, A.; Zaborowicz, M.; Sowa, S. Computer-Aided Structural Diagnosis of Bridges Using Combinations of Static and Dynamic Tests: A Preliminary Investigation. Materials 2023, 16, 7512. [Google Scholar] [CrossRef]
- Shirzad-Ghaleroudkhani, N.; Gül, M. Inverse Filtering for Frequency Identification of Bridges Using Smartphones in Passing Vehicles: Fundamental Developments and Laboratory Verifications. Sensors 2020, 20, 1190. [Google Scholar] [CrossRef]
- Yang, Y.; Zhu, Y.; Wang, L.L.; Jia, B.Y.; Jin, R. Structural Damage Identification of Bridges from Passing Test Vehicles. Sensors 2018, 18, 4035. [Google Scholar] [CrossRef] [PubMed]
- Chang, K.C.; Kim, C.W. Modal-parameter identification and vibration-based damage detection of a damaged steel truss bridge. Eng. Struct. 2016, 122, 156–173. [Google Scholar] [CrossRef]
- Locke, W.; Sybrandt, J.; Redmond, L.; Safro, I.; Atamturktur, S. Using drive-by health monitoring to detect bridge damage considering environmental and operational effects. J. Sound Vib. 2020, 468, 115088. [Google Scholar] [CrossRef]
- Obrien, E.J.; Malekjafarian, A.; González, A. Application of empirical mode decomposition to drive-by bridge damage detection. Eur. J. Mech. A/Solids 2017, 61, 151–163. [Google Scholar] [CrossRef]
- Tan, C.; Elhattab, A.; Uddin, N. Wavelet-Entropy Approach for Detection of Bridge Damages Using Direct and Indirect Bridge Records. J. Infrastruct. Syst. 2020, 26, 04020037. [Google Scholar] [CrossRef]
- Cornaggia, A.; Ferrari, R.; Zola, M.; Rizzi, E.; Gentile, C. Signal Processing Methodology of Response Data from a Historical Arch Bridge toward Reliable Modal Identification. Infrastructures 2022, 7, 74. [Google Scholar] [CrossRef]
- Demirlioglu, K.; Erduran, E. Drive-by Bridge Damage Detection Using Continuous Wavelet Transform. Appl. Sci. 2024, 14, 2969. [Google Scholar] [CrossRef]
- Liu, J.-L.; Wang, S.-F.; Li, Y.-Z.; Yu, A.-H. Time-varying damage detection in beam structures using variational mode decomposition and continuous wavelet transform. Constr. Build. Mater. 2024, 411, 134416. [Google Scholar] [CrossRef]
- Dindar, P.; Hosseini, M.; Mansoori, M.R. Modal Data Identification of the Prestressed Concrete Bridge Using Variational Mode Decomposition. Amirkabir J. Civ. Eng. 2022, 54, 715–736. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, N.E. Ensemble empirical mode decomposition: A noise-assisted data analysis method. Adv. Adapt. Data Anal. 2011, 1. [Google Scholar] [CrossRef]
- Rilling, G.; Flandrin, P.; Goncalves, P. On empirical mode decomposition and its algorithms. In Proceedings of the IEEE-EURASIP Workshop on Nonlinear Signal and Image Processing, NSIP-03, Grado, Italy, 8–11 June 2003. [Google Scholar]
- Yeh, J.R.; Shieh, J.S.; Huang, N.E. Complementary Ensemble Empirical Mode Decomposition: A Novel Noise Enhanced Data Analysis Method. Adv. Adapt. Data Anal. 2010, 2, 135–156. [Google Scholar] [CrossRef]
- Yang, Y.B.; Zhang, B.; Qian, Y.; Wu, Y. Further Revelation on Damage Detection by IAS Computed from the Contact-Point Response of a Moving Vehicle. Int. J. Struct. Stab. Dyn. 2018, 18, 1850137. [Google Scholar] [CrossRef]
- Yang, Y.B.; Xu, H.; Wang, Z.; Shi, K. Using vehicle–bridge contact spectra and residue to scan bridge’s modal properties with vehicle frequencies and road roughness eliminated. Struct. Control Health Monit. 2022, 29, e2968. [Google Scholar] [CrossRef]
- Chui, C.K. An Introduction to Wavelets. Comput. Phys. 1992, 2, 50–61. [Google Scholar] [CrossRef]
- Xu, H.; Liu, Y.; Yang, M.; Yang, D.; Yang, Y. Mode shape construction for bridges from contact responses of a two-axle test vehicle by wavelet transform. Mech. Syst. Signal Process. 2023, 195, 110304. [Google Scholar] [CrossRef]
- Gentile, A.; Messina, A. On the continuous wavelet transforms applied to discrete vibrational data for detecting open cracks in damaged beams. Int. J. Solids Struct. 2003, 40, 295–315. [Google Scholar] [CrossRef]
- Zhong, S.; Oyadiji, S.O. Detection of cracks in simply-supported beams by continuous wavelet transform of reconstructed modal data. Comput. Struct. 2011, 89, 127–148. [Google Scholar] [CrossRef]
- Xiang, J.; Liang, M. Multiple damage detection method for beams based on multi-scale elements using Hermite cubic spline wavelet. Discret. Optim. 2011, 73, 23–39. [Google Scholar] [CrossRef]
- Hester, D.; González, A. A wavelet-based damage detection algorithm based on bridge acceleration response to a vehicle. Mech. Syst. Signal Process. 2012, 28, 145–166. [Google Scholar] [CrossRef]
- Ulker-Kaustell, M.; Karoumi, R. Application of the continuous wavelet transform on the free vibrations of a steel–concrete composite railway bridge. Eng. Struct. 2011, 33, 911–919. [Google Scholar] [CrossRef]
- ISO 8608; Mechanical Vibration-road Surface Profiles-Reporting of Measured Data. International Organization for Standardization: Geneva, Switzerland, 1995.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle body Wheel | Mass (kg) Mass moment of inertia (kg.m2) Stiffness (kN/m) Damping coefficient (kN·s/m) Axle distance to gravity center(m) Vehicle speed (m/s) Mass (kg) Wheel stiffness (kN/m) Wheel damping (Kn·s/m) | Mv = 1000 Jv = 500 Ks1 = Ks2 = 500 Cs1 = Cs2 = 1 d1 = 0.9, d2 = 1.1 v = 5 mf = mr = 100 Kw1 = Kw2 = 1000 Cw1 = Cw2 = 1 |
| Bridge | Bridge Span (m) Modulus of elasticity (GPa) Cross-sectional moment of inertia (m4) Mass per unit length (kg/m) | L = 25 E = 27.5 I = 0.12 m = 2400 |
| Case Number | Vehicle Mass (kg) | Vehicle Speed (m/s) | Damage Location (Element Number) | Degree of Damage (%) |
|---|---|---|---|---|
| 1 | 1000 | 5 | 13 | 5 |
| 2 | 1000 | 5 | 13 | 10 |
| 3 | 1000 | 5 | 13 | 20 |
| 4 | 1000 | 5 | 13 | 30 |
| 5 | 1000 | 2 | 13 | 30 |
| 6 | 1000 | 8 | 13 | 30 |
| 7 | 1000 | 5 | 7, 13, 18 | 30 |
| 8 | 1000 | 5 | 7, 13, 38 | 30 |
| 9 | 1000 | 5 | 13, 32, 38, 44, 63 | 30, 20, 15, 20, 30 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, X.; Ma, K.; Wu, J.; Li, Z. Bridge Damage Identification Based on Variational Modal Decomposition and Continuous Wavelet Transform Method. Appl. Sci. 2025, 15, 6682. https://doi.org/10.3390/app15126682
Jiang X, Ma K, Wu J, Li Z. Bridge Damage Identification Based on Variational Modal Decomposition and Continuous Wavelet Transform Method. Applied Sciences. 2025; 15(12):6682. https://doi.org/10.3390/app15126682
Chicago/Turabian StyleJiang, Xiaobiao, Kun Ma, Jiaquan Wu, and Zhengchun Li. 2025. "Bridge Damage Identification Based on Variational Modal Decomposition and Continuous Wavelet Transform Method" Applied Sciences 15, no. 12: 6682. https://doi.org/10.3390/app15126682
APA StyleJiang, X., Ma, K., Wu, J., & Li, Z. (2025). Bridge Damage Identification Based on Variational Modal Decomposition and Continuous Wavelet Transform Method. Applied Sciences, 15(12), 6682. https://doi.org/10.3390/app15126682