
Discrete-Time Asymptotic Tracking Control System for a Satellite with a Solar Panel


Abstract
1. Introduction
1.1. Related Works
1.2. Organization of This Paper
2. Preliminary Formulation of the Control Problem
3. Plant State Space Models and Their Properties
3.1. Plant Continuous-Time State Space Model and Its Properties
3.2. Plant Discrete-Time State Space Model
3.3. Properties of the Discrete-Time State Space Model
3.3.1. Spectrum of
3.3.2. Controllability and Observability of
3.3.3. Transfer Function of
3.3.4. Zeros and Invertibility of
4. Precise Statement and Solution of the Discrete-Time Control Problem
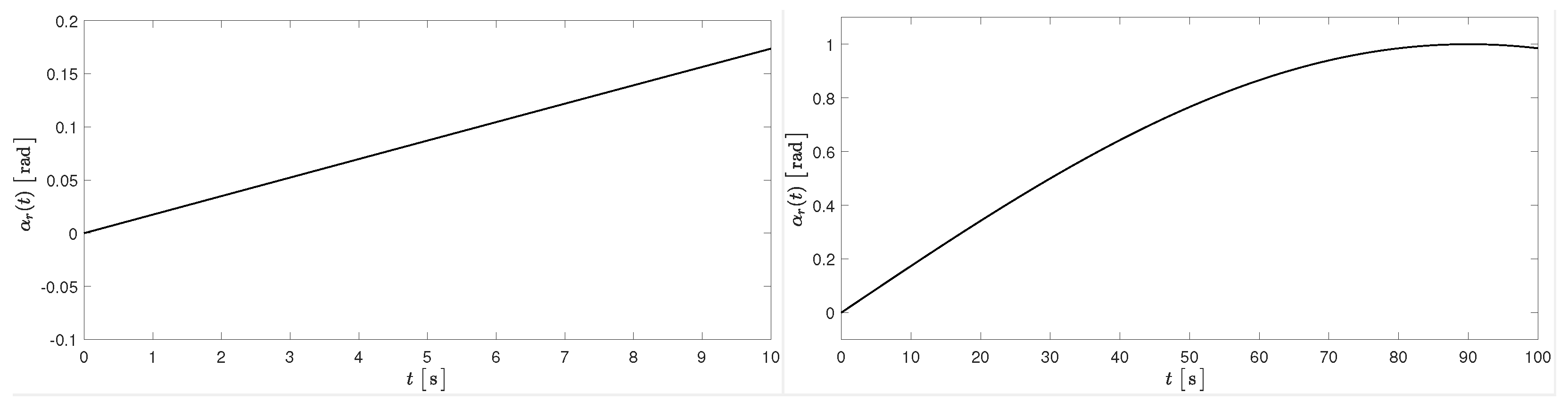
4.1. Reference Signal in Continuous Time
4.2. The Discrete-Time State Space Model of the Exosystem and Its Properties
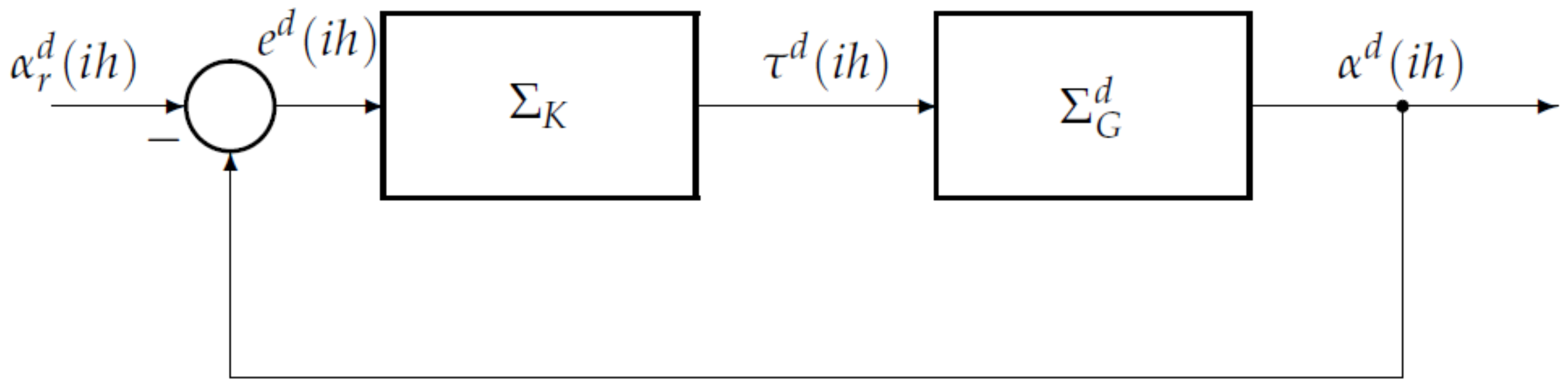
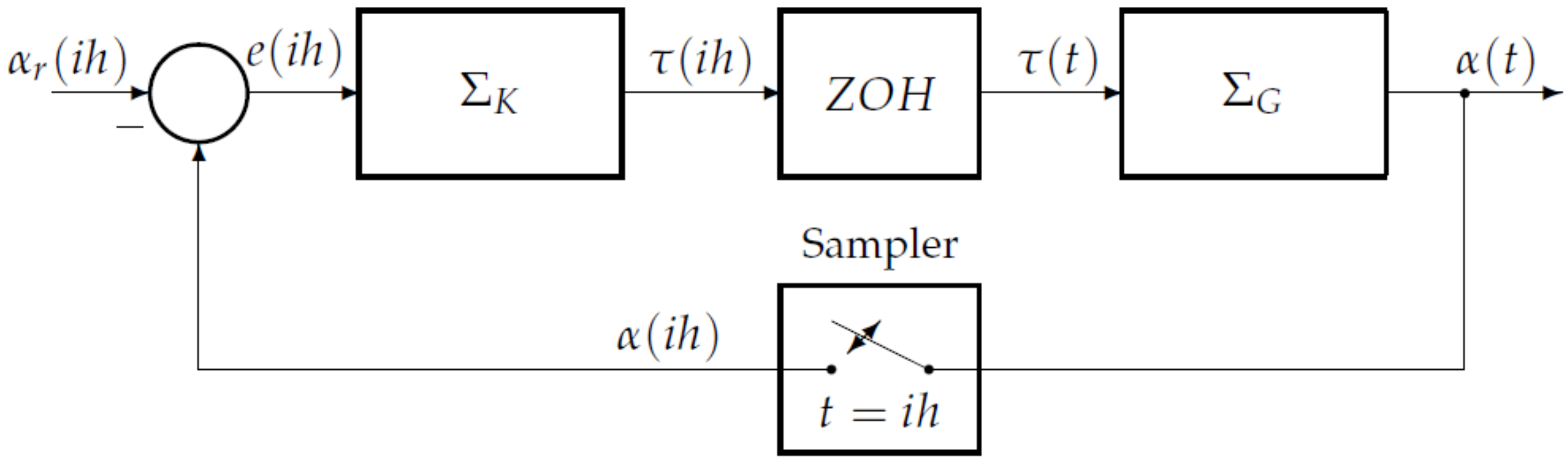
4.3. The Discrete-Time Error Feedback Control System
- IS:
- Internal stability. The error feedback control system is said to be internally stable if the unforced closed system is asymptotically stable; that is, for all , , we have the following:
- AT:
- Asymptotic tracking (or regulation). The error feedback control system is said to satisfy the asymptotic tracking condition if, for all , , and , the forced closed loop system satisfies the following:
4.4. Static State Feedback for the Extended Discrete-Time Plant
4.5. Characterization of the Discrete-Time Error Feedback Controller
4.6. Derivation of the Discrete-Time Error Feedback Controller Based on a Full-Order Observer
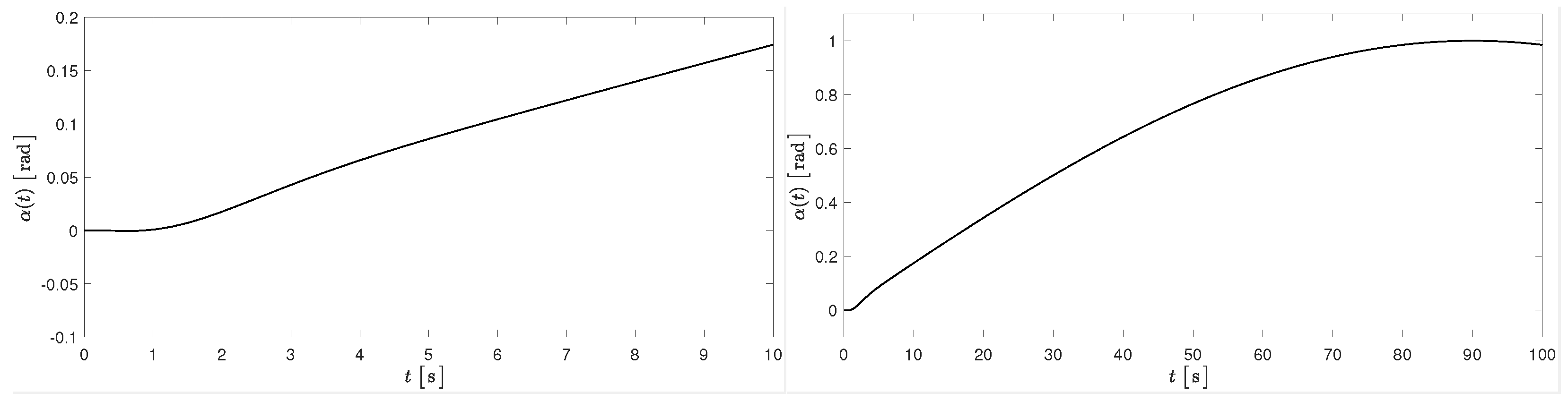
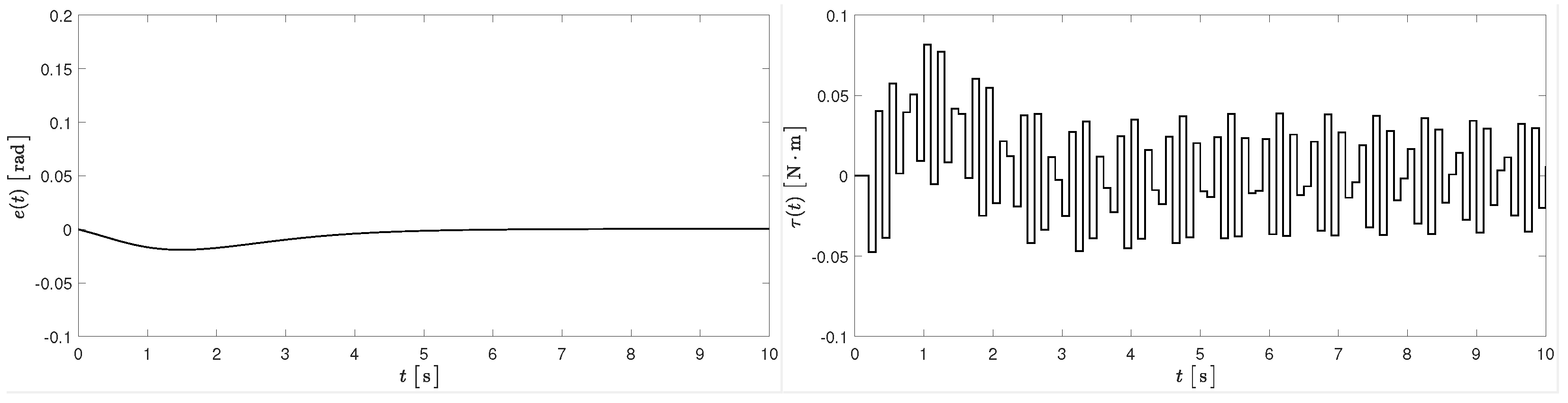
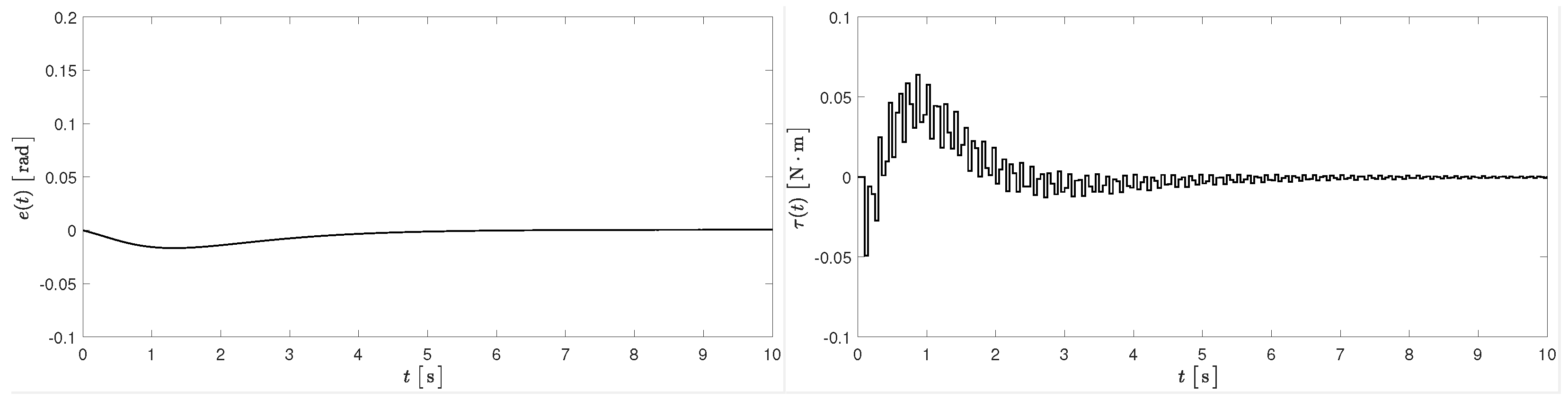
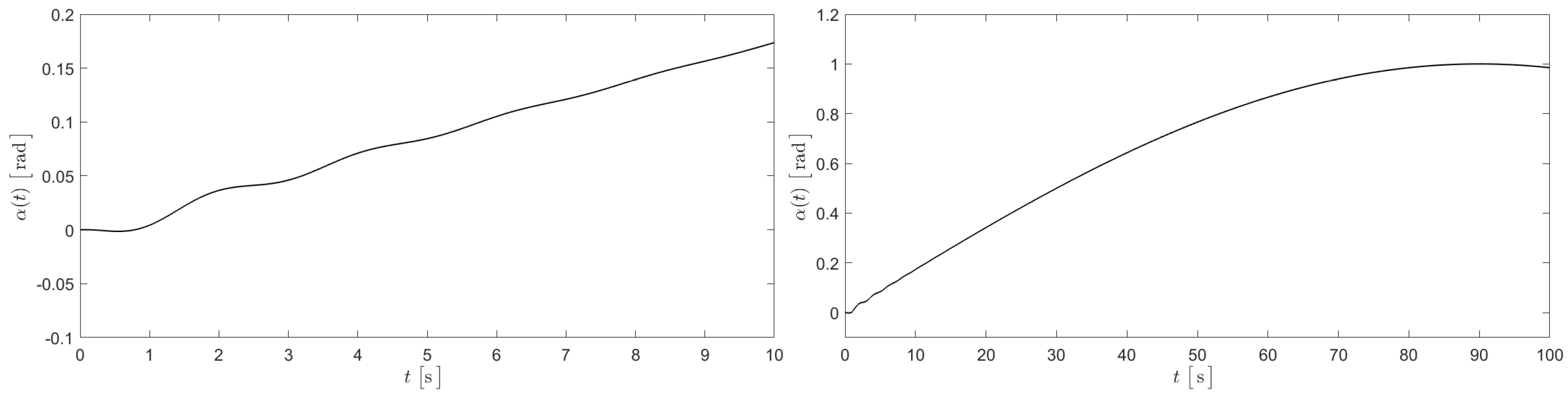
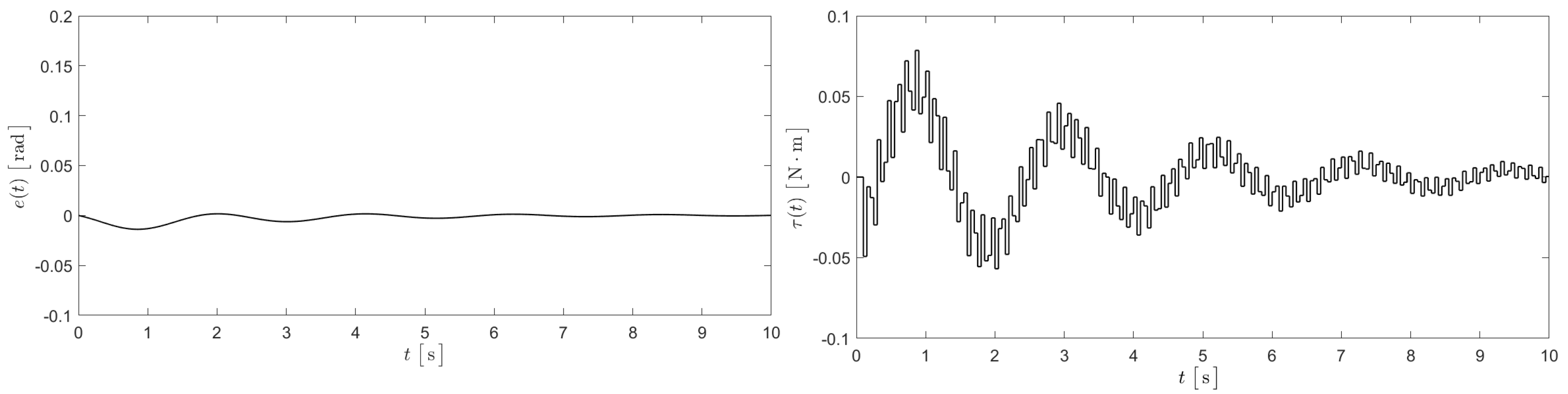
5. Numerical Simulations
6. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Derivation of the Model (1) Using the Euler–Lagrange Method
Appendix B. Verification of (112) and (114) for (131)
References
- Narkiewicz, J.; Sochacki, M.; Zakrzewski, B. Generic model of a satellite attitude control system. Int. J. Aerosp. Eng. 2020, 2020, 5352019. [Google Scholar] [CrossRef]
- Narkiewicz, J.; Grunvald, S.; Sochacki, M. Attitude control system for an earth observation satellite. Bull. Pol. Acad. Sci. Tech. Sci. 2024, 72, e148612. [Google Scholar]
- Xie, Y.; Huang, H.; Hu, Y.; Zhang, G. Applications of advanced control methods in spacecrafts - progress, challenges, and future prospects. Front. Inf. Technol. Electron. Eng. 2016, 17, 416–428. [Google Scholar] [CrossRef]
- Wenya, Z.; Haixu, W.; Zhengwei, R.; Zhigang, W.; Enmei, W. High accuracy attitude control system design for satellite with flexible appendages. Math. Probl. Eng. 2014, 695758. [Google Scholar]
- Wei, H.; Shuzhi, S.G. Dynamic modeling and vibration control of a flexible satellite. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 1422–1430. [Google Scholar]
- Wang, J.; Li, D. Experiments study on attitude coupling control method for flexible spacecraft. Acta Astronaut. 2018, 147, 393–402. [Google Scholar] [CrossRef]
- Angeletti, F.; Gasbarri, P.; Sabatini, M.; Iannelli, P. Design and performance assessment of a distributed vibration suppression system of a large flexible antenna during attitude manoeuvres. Acta Astronaut. 2020, 176, 542–557. [Google Scholar] [CrossRef]
- Angeletti, F.; Iannelli, P.; Gasbarri, P.; Sabatini, M. End-to-end design of a robust attitude control and vibration suppression system for large space smart structures. Acta Astronaut. 2021, 187, 416–428. [Google Scholar] [CrossRef]
- Jungteng, M.; Hao, W.; Dongping, J. PDE model-based boundary control of a spacecraft with double flexible appendages under prescribed performance. Adv. Space Res. 2020, 65, 586–597. [Google Scholar]
- Li, H.; Jia, Q.; Ma, R.; Chen, X. Observer-based robust actuator fault isolation and identification for microsatellite attitude control systems. Aircr. Eng. Aerosp. Technol. 2021, 93, 1145–1155. [Google Scholar] [CrossRef]
- Govindaraj, T.; Humaloja, J.-P.; Paunenen, L. Robust controllers for a flexible satellite model. Math. Control Relat. Fields 2024, 14, 356–385. [Google Scholar] [CrossRef]
- El Hariry, M.; Cini, A.; Mellone, G.; Balossino, A. Deep reinforcement learning policies for underactuated satellite attitude control. arXiv 2025, arXiv:2505.00165. [Google Scholar]
- Francis, B.A. The linear multivariable regulator problem. Siam J. Control Optim. 1977, 15, 486–505. [Google Scholar] [CrossRef]
- Isidori, A.; Marconi, L.; Serrani, A. Robust Autonomous Guidance An Internal Model Approach; Springer: London, UK, 2003. [Google Scholar]
- Havu, V.; Malinen, J. The Cayley transform as a time discretization scheme. Integral Equ. Oper. Theory 2007, 28, 825–851. [Google Scholar] [CrossRef]
- Emirsajłow, Z. Discrete-time output observers for boundary control systems. Int. J. Appl. Math. Comput. Sci. 2021, 31, 613–626. [Google Scholar] [CrossRef]
- Santana, A.; Martins-Filho, L.; Duarte, R.; Arantes, G.; Casella, I. Attitude control of a satellite by using digital signal processing. J. Aerosp. Technol. Manag. 2012, 4, 15–24. [Google Scholar] [CrossRef]
- Molina, J.C.; Ayerdi, V.; Zea, L. Attitude control model for CubeSats. In Proceedings of the 2nd IAA Latin American CueSat Workshop, Florianopolis, Brazil, 28 February–2 March 2016; Volume 2. [Google Scholar]
- Emirsajłow, Z.; Barciński, T.; Bukowiecka, N. Attitude control of an earth observation satellite with a solar panel. In Advanced Contemporary Control; Pawelczyk, M., Bismor, D., Ogonowski, S., Kacprzyk, J., Eds.; Springer Nature: Cham, Switzerland, 2023; pp. 393–402. [Google Scholar]
- Emirsajłow, Z.; Barciński, T. A robust asymptotic tracking controller for an uncertain 2DOF underactuated mechanical system motivated by a satellite attitude control problem. Int. J. Appl. Math. Comput. Sci. 2025, 35, 97–116. [Google Scholar] [CrossRef]
- Curtain, R.; Oostveen, J. Bilinear transformations between discrete-time and continuous-time infinite-dimensional systems. In Proceedings of the International Conference on Methods and Models in Automation and Robotics MMAR1997, Międzyzdroje, Poland, 26–30 August 1997; pp. 861–870. [Google Scholar]
- Ogata, K. Discrete-Time Control Systems; Prentice-Hall: Englewood Cliffs, NJ, USA, 1995. [Google Scholar]
- Francis, B.A.; Wonham, W.M. The internal model principle for linear multivariable regulators. Appl. Math. Optim. 1975, 2, 170–194. [Google Scholar] [CrossRef]
- Williams, R.L.; Lawrence, D.A. Linear State-Space Control Systems; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Matlab Control System Toolbox, Ver. R2024b; MathWorks: Natick, MA, USA, 2024.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Signal or Parameter [SI Units] |
|---|
| Satellite attitude angle |
| Panel attitude angle |
| Satellite driving torque |
| Satellite rotational inertia |
| Panel rotational inertia |
| Stiffness coefficient |
| Damping coefficient |
| Parameter | Value |
|---|---|
| 750 | |
| 0.01 | |
| 1.7 | |
| 0.1 |
| Parameter | Value |
|---|---|
| 675 | |
| 0.011 | |
| 0.765 | |
| 0.11 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Emirsajłow, Z. Discrete-Time Asymptotic Tracking Control System for a Satellite with a Solar Panel. Appl. Sci. 2025, 15, 6674. https://doi.org/10.3390/app15126674
Emirsajłow Z. Discrete-Time Asymptotic Tracking Control System for a Satellite with a Solar Panel. Applied Sciences. 2025; 15(12):6674. https://doi.org/10.3390/app15126674
Chicago/Turabian StyleEmirsajłow, Zbigniew. 2025. "Discrete-Time Asymptotic Tracking Control System for a Satellite with a Solar Panel" Applied Sciences 15, no. 12: 6674. https://doi.org/10.3390/app15126674
APA StyleEmirsajłow, Z. (2025). Discrete-Time Asymptotic Tracking Control System for a Satellite with a Solar Panel. Applied Sciences, 15(12), 6674. https://doi.org/10.3390/app15126674